Автоматика и телемеханика, № 7, 2021
Линейные системы
© 2021 г. Ю.Г. КОКУНЬКО (juliakokunko@gmail.com),
С.А. КРАСНОВА, д-р техн. наук (skrasnova@list.ru),
В.А. УТКИН, д-р. техн. наук (viktorutkin013@gmail.com)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
КАСКАДНЫЙ СИНТЕЗ ДИФФЕРЕНЦИАТОРОВ
С КУСОЧНО-ЛИНЕЙНЫМИ КОРРЕКТИРУЮЩИМИ
ВОЗДЕЙСТВИЯМИ1
На основе теории наблюдателей состояния динамических объектов,
функционирующих в условиях неопределенности, для сигнала, поступаю-
щего в реальном времени (например, задающего воздействия в системе
слежения), предложен метод восстановления его производных высокого
порядка, не требующий ни численного дифференцирования, ни наличия
аналитического описания данного сигнала. Динамический дифференциа-
тор строится как реплика виртуальной канонической модели с неизвест-
ным, но ограниченным входом. Использование ограниченных корректи-
рующих воздействий и специальной структуры дифференциатора позво-
ляет уменьшить выбросы получаемых оценок в начале переходного про-
цесса по сравнению с линейным дифференциатором с большими коэф-
фициентами. В качестве приложения рассмотрена задача отслеживания
центром масс беспилотного летательного аппарата пространственной тра-
ектории, приведены результаты моделирования.
Ключевые слова: динамический дифференциатор, наблюдатель состоя-
ния, неопределенный вход, каскадный синтез, слежение, БПЛА.
DOI: 10.31857/S0005231021070035
1. Введение
Во многих практических задачах возникает необходимость в дифферен-
цировании сигналов. Например, для функционирования следящих систем с
автоматическим управлением, как правило, требуется текущая информация
не только о задающих воздействиях, но и об их производных до n-го поряд-
ка включительно, где n относительный порядок одноканальной системы
(или максимальный элемент вектора относительного порядка многоканаль-
ной системы) [1, 2]. В некоторых системах слежения можно обойтись без непо-
средственной генерации производных задающих воздействий и полагать их,
как и внешние возмущения, неизвестными ограниченными функциями вре-
мени. Тогда при определенных условиях можно использовать для синтеза
выходное отображение и комплексный подход к задаче наблюдения неизме-
ряемых сигналов. В этом случае наблюдатель строится как реплика системы
“вход-выход”, записанной относительно ошибки слежения, и по ее измерени-
ям оцениваются смешанные переменные (линейные комбинации функций от
1 Работа выполнена при частичной финансовой поддержке Российского фонда фунда-
ментальных исследований (проект 20-01-00363А).
38
переменных состояния, внешних возмущающих воздействий и задающих сиг-
налов, а также их производных), по которым формируется обратная связь
[3-5]. Для подавления внешних возмущений в рамках этого подхода могут
использоваться глубокие обратные связи, скользящие режимы или их до-
предельные аналоги в наблюдателе смешанных переменных с последующим
синтезом комбинированной обратной связи по получаемым оценкам. Другая
альтернатива связана с использованием указанных методов непосредственно
в законе управления, когда производные задающих и возмущающих воздей-
ствий неизвестны и не подлежат оцениванию [6, 7]. При этом возмущение
непосредственно действует на регулируемую переменную и не может быть
полностью подавлено из-за физических ограничений на управление, что при-
водит к бóльшей ошибке слежения, чем в первом случае. Таким образом,
для создания высокоточных систем слежения в общем случае необходима те-
кущая информация о производных задающих воздействий до n-го порядка
включительно.
Для объектов управления с однотипными режимами работы и простым
контуром движения, описываемым одним аналитическим выражением, эта
проблема решается с помощью составления динамического генератора задаю-
щих воздействий или аналитического описания желаемой траектории, что да-
ет информацию о производных целевых сигналов требуемого порядка. Одна-
ко в системах управления автономными движущимися объектами на плоско-
сти или в пространстве полное аналитическое описание сложной траектории,
которая представлена разными функциями на разных временных интерва-
лах, является достаточно трудоемким процессом, требующим привлечения
теории графов, сплайновой интерполяции и других методов [8-12]. С другой
стороны, численное дифференцирование задающих воздействий приводит к
нежелательному возбуждению помех и появлению запаздывания, причем по-
грешности увеличиваются с ростом порядка производной, получаемой чис-
ленными методами [13].
В данной статье представлен метод получения информации о производных
задающих воздействий по их текущим значениям, основанный на теории на-
блюдателей состояния объектов управления при действии внешних возмуще-
ний. Эти алгоритмы, реализуемые в вычислительной среде в реальном вре-
мени, не требуют ни численного дифференцирования данных сигналов, ни
их аналитического описания. Суть заключается в построении виртуального
(т.е. реально не существующего) генератора задающего воздействия в виде
динамической модели с неизвестным входом и последующим синтезом на-
блюдателя состояния этого генератора с использованием в корректирующих
воздействиях наблюдателя реального задающего воздействия, поступающе-
го из автономного источника. Особенности построения указанного наблюда-
теля: при его синтезе реализуется метод разделения движений с помощью
непрерывных, ограниченных по модулю корректирующих воздействий, что
позволяет избежать больших выбросов в получаемых оценках; наблюдатель
не имеет собственной динамики, что также способствует снижению выбро-
сов и упрощает процедуру синтеза параметров корректирующих воздействий
[14-16].
39
Отметим, что и целевые сигналы, и возмущения являются внешними воз-
действиями для объекта управления. Но в задачах получения оценок произ-
водных задающих воздействий и внешних возмущений есть принципиальные
отличия. Во-первых, в отличие от внешних возмущений целевые сигналы не
действуют непосредственно на объект управления, а поступают в контрол-
лер, где используются для формирования управления. Во-вторых, обычно
задающие воздействия полагаются известными, что позволяет построить ав-
тономный наблюдатель для оценивания их производных, который не зависит
от процессов, протекающих в объекте управления. Внешние возмущения, как
правило, неизвестны и оцениваются по их воздействию на объект управления
с использованием для построения наблюдателя возмущений модели объекта
управления [15, 16]. В случае когда наблюдатель возмущений строится на
основе виртуальной динамической модели возмущений, он функционирует
совместно с объектом управления, сигналы которого используются для кор-
рекции такого наблюдателя [17]. В-третьих, задача получения оценок произ-
водных задающих воздействий, как показано в данной статье, всегда имеет
решение и не зависит от постановки задачи управления. В то же время за-
дача получения оценок возмущений и их производных не всегда разрешима,
в частности, когда для измерения доступны только выходы объекта управ-
ления, как правило, удается получить оценки только смешанных сигналов
(комбинации переменных состояния объекта управления и внешних возму-
щений) [3-5].
Статья организована следующим образом. В разделе 2 для восстановления
n производных сигнала, поступающего в реальном времени, предложен диф-
ференциатор в виде наблюдателя состояния, построенного на основе вирту-
альной канонической модели (n + 1)-го порядка с неизвестным ограниченным
входом. Выходом такой модели полагается данный сигнал, его текущие значе-
ния известны, аналитическое описание отсутствует, предполагается, что его
производные до (n + 1)-го порядка ограничены известными константами на
рассматриваемом интервале времени. В результате целенаправленного синте-
за переменные наблюдателя с заданной точностью воспроизводят неизвест-
ные производные данного сигнала. В публикации [18] рассматривалась ана-
логичная постановка для гладких сигналов из класса алгебраических поли-
номов любых конечных степеней с непрерывными производными. Настройка
наблюдателя стандартно выполнялась с помощью линейных глубоких обрат-
ных связей. В данной статье, во-первых, класс допустимых сигналов расши-
ряется за счет кусочно-дифференцируемых составных функций, производные
которых имеют точки разрыва первого рода в моменты изменения вида функ-
ций. Во-вторых, для настройки наблюдателя используются ограниченные,
непрерывные, но негладкие кусочно-линейные корректирующие воздействия
[3, 4, 16], которые являются гибридом линейных и разрывных управлений и
имеют по два настраиваемых параметра: полку (амплитуду) и угол наклона
(большой коэффициент). Они привносят в замкнутую систему положитель-
ные свойства обоих методов и исключают их недостатки. Идея заключается
в том, чтобы выбором амплитуд последовательно, по каскадному принципу
обеспечить попадание за конечное время аргументов корректирующих воз-
действий в линейные зоны, границы которых и соответственно точность оце-
40
нивания определяются выбором больших коэффициентов. Заметим, что в от-
личие от обычных линейных наблюдателей [18] в данном подходе настройка
больших коэффициентов осуществляется на основе неравенств и не требует
составления эталонных характеристических полиномов. В-третьих, помимо
стандартного наблюдателя, который строится как реплика объектов оцени-
вания, в данной статье рассматривается также наблюдатель без собственных
движений [14-16]. При этом в системе относительно ошибок наблюдения оце-
ниваемые сигналы присутствуют в явном виде, что существенно упрощает
процедуру настройки параметров корректирующих воздействий по сравне-
нию с базовыми алгоритмами [3, 4].
В разделе 3 разработанный метод восстановления производных применя-
ется в системе управления движением центра масс беспилотного летательного
аппарата (БПЛА). Демонстрируется также возможность оценивания внеш-
них возмущений, действующих на объект [15, 16], с помощью наблюдателя
с кусочно-линейной коррекцией, построенного как реплика модели объекта
управления. Приводятся результаты численного моделирования.
2. Синтез динамических дифференциаторов в виде наблюдателей состояния
Представим два способа построения дифференциаторов задающего сигна-
ла для выходной переменной следящей одноканальной системы. Без ограни-
чения общности данные методы могут быть использованы в многоканальных
системах, где для каждой компоненты вектора задающих воздействий стро-
ится свой дифференциатор соответствующего порядка, а также могут найти
применение в других прикладных задачах, требующих получения производ-
ных сигналов, аналитическое описание которых неизвестно.
2.1. Постановка задачи
Рассмотрим случай управляемого объекта с одним входом и одним вы-
ходом y1(t) ∈ Y ⊂ R, t ≥ 0, где Y
открытая рабочая область изменения
регулируемой переменной. Предположим, что для данного объекта в рамках
тех или иных методов синтезирован закон управления, обеспечивающий от-
слеживание выходной переменной заданного сигнала, который зависит и от
производных задающего воздействия до n-го порядка включительно. Задаю-
щее воздействие поступает в систему управления в реальном времени в виде
непрерывного детерминированного сигнала g1(t), его аналитическое описание
как функции времени не известно. Задающий сигнал является допустимым
для отработки, т.е. g1(t) ∈ G1 ⊂ Y , t ≥ 0, и его производные до (n + 1)-го по-
рядка включительно ограничены
i)
(2.1)
g(
(t)≤Gi+1
,
i = 1,n + 1, t ≥ 0,
1
где Gi+1
известные положительные константы, отвечающие проектным
ограничениям конкретного объекта управления.
Ставится задача оценивания с заданной точностью производных задаю-
щего сигнала до n-го порядка включительно с помощью динамического на-
41
блюдателя состояния, который выполняет функции дифференциатора. В ка-
честве основы для построения наблюдателя введем динамическую модель
(n + 1)-го порядка, имеющую канонический вид
(2.2)
ġi = gi+1
,
i = 1,n + 1.
Выходом системы (2.2) полагается измеряемый сигнал g1(t); переменными
состояния являются задающий сигнал и его производные g(i)1(t) = gi+1(t)
до n-го порядка включительно; вход g(n+1)1(t) = gn+2(t)
производная
(n + 1)-го порядка является неизвестной ограниченной функцией времени.
В силу канонической структуры система (2.2) является наблюдаемой отно-
сительно выхода, что является предпосылкой решения задачи оценивания ее
состояния.
Естественно предположить, что g1(t) как функция времени является
непрерывной и кусочно-дифференцируемой, т.е. допускается, что на разных
временных интервалах она описывается разными аналитическими выраже-
ниями. Как следствие, ее производные в общем случае являются ку-
сочно-непрерывными, ограниченными на интервалах и имеют конечное число
точек разрыва первого рода, в которых форма сигнала меняется и в которых
ограничения (2.1) следует понимать как односторонние. Применительно к
модели (2.2) это означает, что входной виртуальный сигнал gn+2(t) являет-
ся неизвестной кусочно-непрерывной ограниченной функцией, которая имеет
различный вид на различных временных интервалах.
Таким образом, динамическая модель (2.2) порождает достаточно широ-
кий класс функций g1(t), а именно множество решений канонической систе-
мы (n + 1)-го порядка с произвольным входом gn+2(t). Допускаемые точки
конечного разрыва производных можно трактовать как моменты изменения
скачком начальных условий в системе (2.2).
Обратим внимание, что в рассматриваемой постановке модель (2.2) яв-
ляется виртуальной и не используется в контуре обратной связи в качестве
генератора задающего сигнала, она служит для определения структуры и
размерности наблюдателя производных данного сигнала. В других поста-
новках входной сигнал gn+2(t) может зависеть от вектора состояния модели
(2.2), а также и от внешних по отношению к модели (2.2) сигналов, в част-
ности от вектора состояния модели объекта управления. В этом смысле (2.2)
является обобщением и расширением динамических моделей, используемых
для имитации и генерации внешних воздействий в виде экзогенных систем с
неизвестными начальными условиями [1, 17]. В [19] рассматривался генера-
тор заданий с неопределенными параметрами. В робастной постановке зада-
ча наблюдения его состояний дополнялась решением задачи идентификации
неизвестных параметров с привлечением методов теории систем с разрывны-
ми управлениями, функционирующих в скользящем режиме.
2.2. Наблюдатель производных стандартной структуры
В данном подразделе для системы (2.2) вводится стандартный наблюда-
тель состояния. Рассматриваются частные случаи, при которых можно по-
42
лучить асимптотические оценки производных с помощью обычной линей-
ной коррекции. Мотивируется использование в общем случае наблюдателя
с кусочно-линейными корректирующими воздействиями.
Стандартный наблюдатель состояния строится как реплика объекта, пе-
ременные которого подлежат оцениванию, т.е. в данном случае повторяет
структуру виртуальной модели (2.2) и имеет вид
(2.3)
Żi = zi+1 + vi, i = 1,n;
Żn+1 = vn+1,
где z = (z1, . . . , zn+1)T∈Rn+1- вектор состояний наблюдателя, vi (i = 1, n + 1) -
корректирующие воздействия, которые формируются на основе измере-
ний g1(t) и переменных наблюдателя так, чтобы обеспечить стабилизацию
системы относительно ошибок наблюдения εi = gi - zi, i = 1, n+1, которая в
силу (2.2), (2.3) имеет вид:
(2.4)
εi = εi+1 - vi, i = 1,n,
εn+1 = gn+2 - vn+1.
Особенность системы (2.4) заключается в наличии неизвестного ограни-
ченного сигнала g(n+1)(t) = gn+2(t), который трактуется как внешнее возму-
щение. Сначала выделим частные случаи, при которых возможна асимпто-
тическая стабилизация системы (2.4).
Если функция gn+2(t) известна, то с использованием этой информа-
ции последние уравнения систем (2.3) и (2.4) примут соответственно вид:
Żn+1 = gn+2 + vn+1, εn+1 = -vn+1. Тогда применение обычной линейной кор-
рекции
(2.5)
v1 = a1ε1, v2 = a2ε1, ... , vn+1 = an+1ε1,
параметры которой являются коэффициентами гурвицева полинома λn+1+
+a1λn + a2λn-1 + ... + anλ + an+1, обеспечит асимптотическую сходимость
в нуль ошибок наблюдения и, следовательно, асимптотическую сходимость
переменных наблюдателя к неизмеряемым производным:
(2.6)
lim
εi(t) = 0 ⇒ lim
zi(t) = gi
(t), t = 1, n + 1.
t→+∞
t→+∞
Если есть основание полагать, что задающий сигнал описывается алгеб-
раическим полиномом с максимальной степенью n = n, то тогда g(n+1)1(t) ≡ 0,
внешнее возмущение в системе (2.4) отсутствует и линейная коррекция (2.5)
также обеспечит асимптотическое оценивание производных (2.6). Если из-
вестно, что максимальная степень полиномов 1 ≤ n < n, то тогда все произ-
водные начиная с (n + 1)-й тождественно равны нулю. Соответственно по-
рядок наблюдателя (2.3) следует понизить на n - n. Если n < n < ∞, то,
наоборот, можно повысить порядок наблюдателя на n - n, чтобы обеспе-
чить асимптотические оценки (2.6). При этом попутно полученная избыточ-
ная информация о (n + 1)-й производной и выше не используется в законе
управления.
В общем случае, когда о “внешнем возмущении” gn+2(t) предполага-
ется только его ограниченность по модулю (2.1), для его подавления с
43
необходимостью требуется применять методы теории скользящих режимов
[6, 14, 15, 19, 20] или линейных систем с глубокими обратными связями. В по-
следнем случае линейная коррекция (2.5) дополняется большим коэффици-
ентом l > 1 [21] следующим образом:
(2.7)
v1 = a1lε1, v2 = a2l2ε1, ... , vn+1 = an+1ln+1ε1,
что обеспечивает в замкнутой системе (2.4), (2.7) стабилизацию ошибок на-
блюдения с заданной точностью. Известным недостатком линейных наблю-
дателей с большими коэффициентами является большое перерегулирование
в начале переходных процессов [5, 18, 21-23], что приводит к перерегулиро-
ванию и в объекте управления, обратная связь в котором формируется по
сигналам наблюдателя.
Чтобы избежать указанной проблемы, в данной статье используется дру-
гой метод подавления возмущений
каскадный синтез наблюдателей с
кусочно-линейными, всюду ограниченными корректирующими воздействия-
ми [3, 4, 16] вида
[
p1sign(ε1),
|ε1| > 1/l1,
(2.8)
v1 = p1sat(l1ε1) =
p1l1ε1,
|ε1| ≤ 1/l1;
[
pi sign(vi-1),
|vi-1| > 1/li,
vi = pisat(livi-1) =
pilivi-1,
|vi-1| ≤ 1/li, i = 2, n + 1.
Каждое корректирующее воздействие (2.8) имеет по два настраиваемых
параметра: pi > 0
амплитуду, которая отвечает за скорость оценива-
ния, и li > 0
угол наклона, который играет роль большого коэффи-
циента и отвечает за точность оценивания. Будем говорить, что если
|ε1| ≤ 1/l1, |vi-1| ≤ 1/li, i = 2,n + 1, то соответствующие корректирующие
воздействия vi, i = 1, n + 1, (2.8) находятся в “линейной зоне”.
В [3] в рамках синтеза одноканальной системы слежения при действии
внешних возмущений наблюдатель, аналогичный (2.3), (2.8), применялся
для оценивания смешанных переменных (функций от переменных состояния,
внешних воздействий и их производных) по измерениям ошибки слежения.
Были получены иерархические системы неравенств для выбора параметров
кусочно-линейных корректирующих воздействий, при которых за заданное
время T > 0 с заданной точностью δ > 0 обеспечивается оценивание неизме-
ряемых сигналов канонической системы, аналогичной (2.1)-(2.2). Соответ-
ственно в терминах решаемой задачи использование этого подхода обеспечит
(2.9)
|εi(t)| = |gi(t) - zi(t)| ≤ δ, i = 1, n + 1,
|gn+2(t) - vn+1
(t)| ≤ δ, t ≥ T.
Первая группа неравенств (2.9) означает, что переменные наблюдателя (2.3)
служат оценками соответствующих производных задающего сигнала, послед-
нее неравенство (2.9) показывает, что корректирующее воздействие послед-
него уравнения может служить оценкой неизвестного входа. Как следствие,
для оценивания n производных можно использовать наблюдатель, порядок
которого по сравнению с (2.3) понижен на единицу, при этом n-я производная
44
будет трактоваться как возмущение, а ее оценкой будет служить корректи-
рующее воздействие vn(t) [3].
Замечание. Для простоты изложения в оценках (2.9) и далее области
сходимости различных ошибок наблюдения, имеющих различные единицы
измерения, будем единообразно обозначать δ и придавать им одинаковые чис-
ловые значения δ > 0, но в соответствующих единицах измерения по умол-
чанию.
Основное преимущество наблюдателя (2.3), (2.8) по сравнению с наблюда-
телем с глубокими обратными связями заключается в том, что корректирую-
щие воздействия (2.8) всюду ограничены, следовательно, будут существенно
ограничены всплески оценочных сигналов в начале всех переходных процес-
сов, которые порождаются сменой формы выходного кусочно-дифференци-
руемого сигнала. Результаты моделирования показали [23], что всплески оце-
ночных сигналов производных, полученные с помощью линейного наблюда-
теля с большими коэффициентами, каждый раз увеличиваются на порядок с
ростом порядка производной (что обусловлено иерархией большого коэффи-
циента (2.7)), в отличие от оценочных сигналов наблюдателя с кусочно-ли-
нейными корректирующими воздействиями, которые заведомо ограничены
амплитудами корректирующих воздействий. Таким образом, применение на-
блюдателя (2.3), (2.8) существенно расширяет класс допустимых функций,
оценочные сигналы производных которых могут быть непосредственно ис-
пользованы в практических приложениях без дополнительных ограничений.
К преимуществам наблюдателя (2.3), (2.8) можно также отнести каскад-
ную процедуру настройки на основе иерархии неравенств, не требующую со-
ставления эталонных характеристических полиномов (в отличие от (2.5)).
Заметим, что в указанных выше частных случаях применение корректирую-
щих воздействий (2.8) не только обеспечит асимптотические оценки (2.6), но
и даст возможность последовательно управлять темпами сходимости каждой
переменной замкнутой системы. Однако для настройки амплитуд и в част-
ных, и в общем случаях требуется определять области изменения ошибок
наблюдения в процессе регулирования [3, 4], что усложняет вычислительный
аспект, а также приводит к завышенным расчетным оценкам для выбора
параметров. Соответствующая процедура будет продемонстрирована в под-
разделе 3.4 на примере оценивания производных задающих сигналов БПЛА.
В подразделе 2.3 представлен основной результат. Для снятия указан-
ной проблемы предложена другая структура наблюдателя производных с
кусочно-линейными корректирующими воздействиями, который обеспечива-
ет такое же качество оценивания (2.9), как и наблюдатель (2.3), (2.8), но име-
ет более простую первичную настройку благодаря исключению из анализа
собственных движений ошибок наблюдения.
2.3. Наблюдатель производных без собственных движений
В данном подразделе представлен основной результат. Для системы (2.2)
вводится наблюдатель состояния специальной структуры без собственных
движений. Выделяются особенности каскадного синтеза кусочно-линейных
корректирующих воздействий, при котором реализуется разделение движе-
45
ний в пространстве ошибок наблюдения. Формализуются особенности оце-
нивания кусочно-непрерывных сигналов, с учетом которых формулируется
теорема о существовании решения задачи оценивания производных предло-
женным методом.
На основе модели (2.2) построим наблюдатель-дифференциатор специаль-
ного вида
(2.10)
Żi = vi
,
i = 1,n + 1,
что приведет к системе относительно ошибок наблюдения
(2.11)
εi = gi+1 - vi
,
i = 1,n + 1,
и следующему виду кусочно-линейных корректирующих воздействий:
[
p1sign(ε1),
|ε1| > 1/l1,
(2.12)
v1 = p1sat(l1ε1) =
p1l1ε1,
|ε1| ≤ 1/l1;
[
pisign(vi-1 - zi),
|vi-1 - zi| > 1/li,
vi = pisat(li(vi-1 - zi)) =
pili(vi-1 - zi),
|vi-1 - zi| ≤ 1/li, i = 2, n + 1.
Отметим, что в отличие от стандартного наблюдателя (2.3), приводящего
к системе (2.4), в системе (2.11)-(2.12) асимптотическая сходимость ошибок
наблюдения (2.6) может быть обеспечена только тогда, когда все n + 1 про-
изводных затухают со временем. Но даже в этом частном случае с помощью
обычной линейной коррекции (2.5) невозможно обеспечить асимптотическую
стабилизацию нейтральной системы (2.11) из-за наличия неустранимых ну-
левых собственных значений. Таким образом, синтез наблюдателя (2.10) тре-
бует применения специальных подходов, основанных на методе разделения
движений ошибок наблюдения в замкнутой системе.
В силу структуры системы (2.11) сигналы, на основе которых формиру-
ются корректирующие воздействия vi, i = 2, n + 1, (2.12), можно представить
в виде
(2.13)
vi-1 - zi = gi - εi-1 - zi = εi - εi-1
,
i = 2,n + 1,
что совпадает с детализацией соответствующих корректирующих воздей-
ствий (2.8) системы (2.4), а именно
(2.14)
vi-1 = εi - εi-1
,
i = 2,n + 1.
Отличие состоит в том, что в системе (2.11) оцениваемые сигналы присут-
ствуют в явном виде и области их изменения априори известны (2.1), что
позволяет достаточно просто обеспечить стабилизацию с заданной точностью
ошибок наблюдения.
Согласно идеологии метода разделения движений, реализуемой при кас-
кадном синтезе наблюдателя с кусочно-линейной коррекцией [3, 4, 15, 16], в
замкнутой системе (2.11)-(2.12) с учетом (2.13) выбором амплитуд pi > 0,
46
i = 1,n + 1, требуется последовательно обеспечить сходимость аргументов
корректирующих воздействий в линейные зоны:
|ε1(t)| ≤ 1/l1, t ≥ t1 ≥ 0 ⇒ |v1(t) - z2(t)| = |ε2(t) - ε1(t)| ≤ 1/l2,
(2.15)
t ≥ t2 > t1 ⇒ |ε3(t) - ε2(t)| ≤ 1/l3,
t ≥ t3 > t2 ⇒ ... ⇒ |εn+1(t) - εn(t)| ≤ 1/ln+1, t ≥ tn+1 > tn.
Особенность каскадного синтеза заключается в том, что только в первом
уравнении системы (2.11)-(2.12) равенство знаков регулируемой переменной
и ее корректирующего воздействия имеет место на протяжении всего про-
цесса: sign(ε1(t)) = sign(v1(t)), t ≥ 0. Для остальных уравнений совпадения
знаков sign(εi(t)) = sign(vi(t)), i = 2, n + 1, гарантируются только вне обла-
стей (2.15) при достаточном затухании производных ошибок наблюдения в
предыдущих уравнениях.
Грубой (первичной) настройкой дифференциатора будем называть проце-
дуру, в которой время оценивания T > 0 априори не устанавливается. Выбо-
ром параметров корректирующих воздействий (2.12) обеспечивается последо-
вательная сходимость ошибок наблюдения в заданные окрестности нуля, при
этом не учитываются: скорости сходимости в линейные зоны (2.15) и затуха-
ния производных ошибок наблюдения, а также ошибки уравнений статики,
т.е. полагается, что εi(t) ≈ 0, t > ti, i = 1, n.
В этих допущениях на основе (2.15) и достаточных условий сходимости
имеем первичные нижние оценки для выбора параметров кусочно-линейной
коррекции (2.12), обеспечивающих первую группу неравенств (2.9):
εi εi = εi(gi+1 - pisign(εi)) ≤ |εi|(Gi+1 - pi) < 0 ⇒ pi > Gi+1,
(2.16)
|εi| ≤ 1/li < δ ⇒ li > 1/δ, i = 1, n + 1.
Заметим, что второе неравенство (2.16) можно использовать и для первич-
ной настройки больших коэффициентов базового наблюдателя (2.3), (2.8) в
силу (2.14). Однако и грубая (pi > |εi+1(t, pi+1)|, i = 1, n; pn+1 > Gn+2 [3]), и
тонкая (т.е. с обеспечением заданного времени сходимости с учетом быстрых
движений) настройки его амплитуд уже не являются автономными, как в
первом выражении (2.16), а основаны на иерархии неравенств (как будет по-
казано в подразделе 3.4, выбор допустимой величины pi, i = n, 1, зависит от
принятого значения pi+1). Преимущество дифференциатора (2.10), (2.12) по
сравнению с наблюдателем (2.3), (2.8) заключается в том, что независимый
выбор его амплитуд сохранится и при тонкой настройке с учетом заданно-
го времени сходимости (см. Приложение). Кроме того, диапазоны изменения
оценочных сигналов (2.1), как правило, меньше расчетных максимальных
значений соответствующих ошибок наблюдения в начале переходного про-
цесса, что позволит обеспечить заданное время оценивания с меньшими ам-
плитудами и, как следствие, уменьшить перерегулирование.
Отметим, что порядок дифференциатора (2.10) также может быть пони-
жен на единицу, если использовать корректирующее воздействие последнего
уравнения в качестве оценочного сигнала для n-й производной (аналогич-
но второму неравенству (2.9)). Более того, корректирующие воздействия при
47
выполнении уравнений статики могут служить оценками не только входного
сигнала, но и всех остальных производных:
εi = gi+1 - vi ≈ 0 ⇒ vi(t) ≈ gi+1(t), i = 1,n + 1.
Однако на практике в качестве оценочных сигналов производных до n-го по-
рядка рекомендуется использовать соответствующие переменные дифферен-
циатора: zi(t) ≈ gi(t), i = 1, n + 1, t ≥ T . Причина заключается в том, что
при каждой смене формы задающего сигнала корректирующие воздействия
vi(t) ≤ pi, i = 2,n + 1, могут выходить на предельные значения (в отличие от
переменных наблюдателя, которые в общем случае этих пиков не достигают),
что приведет к большей ошибке оценивания и негладкости оценочных сигна-
лов в начале переходных процессов. По указанным причинам для оценивания
1 < n незатухающих производных целесообразно использовать полноразмер-
ный дифференциатор (2.10), (2.12) порядка n + 1, и далее будем рассматри-
вать его тонкую настройку без соблюдения точности оценивания входного
сигнала (т.е. без требования выполнения последнего неравенства (2.9)). При
необходимости получения оценки ненулевой производной порядка n + 1 ре-
комендуется использовать дифференциатор порядка n + 2.
Что касается установки начальных условий в дифференциаторе (2.10), то с
учетом измерений g1(t) и для сокращения времени оценивания целесообразно
принять
z1(0) = g1(0) ⇒ ε1(0) = 0, zi(0) = 0 ⇒ εi(0) = gi(0),
|εi(0)| ≤ Gi, i = 2, n + 1.
Соответствующие оценки начальных условий ошибок наблюдения являются
опорными при тонкой настройке дифференциатора гладкого сигнала с непре-
рывными производными, которая в рамках используемого подхода обеспечит
|g1(t) - z1(t)| ≤ δ, t ≥ 0;
|gi(t) - zi(t)| ≤ δ, i = 2, n + 1, t ≥ T.
Теперь формализуем особенности процесса оценивания кусочно-диффе-
ренцируемых функций, удовлетворяющих (2.1). Наложим следующее условие
на формирование задающего сигнала. Пусть минимальный интервал време-
ни, на котором g1(t) является n + 1 раз дифференцируемой функцией, равен
τmin ≤ τj - τj-1, j = 1,2,..., где [τj-1;τj)
текущий интервал времени, на
котором сигнал является гладким. В точках τ1, τ2, . . .: 0 = τ0 < τ1 < τ2 < . . .
его производные могут иметь конечные разрывы, которые трактуются как
переустановка скачком начальных условий в виртуальной модели (2.2). Каж-
дая следующая переустановка допускается не раньше, чем через τmin. Соот-
ветственно при настройке параметров дифференциатора следует положить
T ≪ τmin, тогда ошибки наблюдения будут находиться в заданной окрестно-
сти нуля в интервалах
|εi(t)| ≤ δ, τj-1 + T ≤ t < τmin ≤ τj, j = 1, 2, . . . , i = 2, n + 1;
(2.17)
|ε1(t)| ≤ δ, t ≥ 0.
Максимальные величины скачков производных |gi(τj + 0) - gi(τj - 0)| ≤ 2Gi,
i = 2,n + 1, с учетом zi(τj - 0) ≈ gi(τj - 0) можно принять в качестве кон-
сервативных расчетных оценок начальных условий системы (2.11) для всех
48
интервалов:
(2.18)
|ε1(τj-1)| ≤ δ,
|εi(τj-1)| ≤ 2Gi
,
i = 2,n + 1, j = 1,2,...
Данные оценки позволяют не учитывать особые точки τ1, τ2, . . . и выполнить
тонкую настройку параметров корректирующих воздействий (2.12), рассмат-
ривая только наименьший интервал t ∈ [0; τmin), где g1(t) является гладкой
функцией с непрерывными производными. Параметры, выбранные исходя из
расчетных начальных условий (2.18), а также выполнение T ≪ τmin обеспечат
нахождение ошибок наблюдения в заданной окрестности нуля в указанное
время (2.17). В сделанных предположениях имеет место следующая теорема.
Теорема. Если в системе (2.11)-(2.12) условия (2.1) выполняются, то
тогда для любых начальных условий εi(0), i = 1,n + 1, и сколь угодно ма-
лых δ, T > 0 найдутся такие положительные действительные числа p∗i, l∗i,
что при любых pi, li: pi > p∗i, li > l∗i, i = 1, n + 1, выполняются неравенства
(2.19)
|εi(t)| = |zi(t) - gi
(t)| ≤ δ, i = 1, n + 1, t ≥ T.
В Приложении приведено конструктивное доказательство теоремы, в ходе
которого получены неравенства (П.8), (П.13) для выбора параметров (2.12) с
учетом быстрых движений, обеспечивающие (2.19).
Заметим, что априори моменты времени τ1, τ2, . . . и τmin > 0 неизвестны.
Если длина текущего интервала окажется меньше принятого при настройке
времени оценивания T > τj - τj-1, то тогда на этом интервале заданная точ-
ность оценивания (2.17) в общем случае достигнута не будет, можно только
гарантировать ограниченность ошибок оценивания:
|εi(τj )| ≤ 2Gi + (Gi+1 + pi)(τj - τj-1), i = 2, n + 1.
3. Синтез системы управления БПЛА без использования
генераторов внешних воздействий
В данном разделе представленные методы построения дифференциато-
ров применяются в системе управления беспилотным летательным аппара-
том (БПЛА) для оценивания производных задающих сигналов и внешних
возмущений.
3.1. Модель объекта управления. Постановка задач
Рассматривается математическая модель пространственного движения
центра масс (материальной точки) БПЛА в траекторной системе координат,
представленная в нормальной форме [12, 22]
x1 = x2,
(3.1)
x2 = ag + η + B(θ,Ψ)u,
где x1 = (x11, x12, x13)T ∈ R3
вектор пространственных координат центра
масс (выходные регулируемые переменные) с элементами x11 := L про-
дольная дальность, x12 := H высота, x13 := Z боковое смещение; x2 =
49
= (x21, x22, x23)T ∈ R3 вектор скорости пространственных координат с эле-
ментами
(3.2)
x21 := V cos θ cos Ψ, x22 := V sin θ, x23
:= -V cos θ sin Ψ,
где V путевая скорость, θ угол наклона траектории, Ψ путевой угол;
g ускорение свободного падения, a = (0; -1; , 0)T ; u = (u1, u2, u3)T ∈ R3
вектор управления, элементы которого u1 = gnx, u2 = gny cos γ, u3 = gny sin γ
выражены через продольную nx и поперечную ny перегрузки, а также угол
крена γ вектора перегрузки, |γ(t)| < π; η(t) вектор внешних детерминиро-
ванных возмущений;
cos θ cos Ψ
-sin θ cos Ψ sin Ψ
B = sinθ
cos θ
0
,detB≡1,B-1 = BT.
− cos θ sin Ψ sin θ sin Ψ cos Ψ
Рассматривается проблема синтеза обратной связи, обеспечивающей от-
слеживания выходными переменными x1(t) заданных сигналов g1(t) =
= (g11, g12, g13)T в следующих предположениях:
прямым измерениям доступны пространственные координаты x1(t), а
также V (t), θ(t), Ψ(t), через которые пересчитываются элементы вектора ско-
рости x2(t) (3.2);
генераторы внешних воздействий в системе управления отсутствуют,
сигналы g1(t) поступают в нее в реальном времени из независимого источ-
ника, их аналитический вид неизвестен, но предполагается, что задающие
воздействия корректны и могут быть отработаны конкретным БПЛА;
элементы векторов η(t), ġ1(t) = g2(t), g1(t) = g3(t),
g1 (t) = g4(t) являют-
ся неизвестными функциями времени, нормы векторов ограничены известны-
ми константами:
j)
(3.3)
|η(t)| ≤ H,
g(
(t)≤Gj
,
t ≥ 0, j = 1,3,
1
здесь и далее под обозначением |∗| следует понимать евклидову норму век-
тора.
Ставится задача синтеза динамической обратной связи, обеспечивающей
стабилизацию ошибок слежения e1(t) = x1(t) - g1(t), которая включает ре-
шение следующих подзадач:
1) синтез базового (т.е. в предположении, что все внешние сигналы из-
вестные) закона комбинированного управления, обеспечивающего экспонен-
циальную сходимость в нуль ошибки слежения с заданной скоростью:
(3.4)
|e1(t)|
=
O(exp(-k1t)) ⇔ lim
e1(t) = 0, k1
= const > 0;
t→+∞
t→+∞
2) синтез наблюдателя внешних возмущений, построенный как реплика
редуцированной модели объекта управления (3.1), с получением оценок
(3.5)
|η(t) - v0
(t)| ≤ δ, t ≥ T > 0,
где v0 ∈ R3 корректирующие воздействия наблюдателя возмущений;
50
3) синтез наблюдателя производных задающих воздействий, построенный
как реплика виртуальной канонической модели (2.2), с получением оценок
(3.6)
|gi(t) - zi
(t)| ≤ δ, t ≥ T > 0, i = 2, 3,
где zi ∈ R3 переменные состояния наблюдателя производных.
Как будет показано далее, данные наблюдатели функционируют и настраи-
ваются автономно друг от друга, поэтому имеется возможность реализовать
процесс оценивания внешних сигналов за заданное время T > 0 с одинаковой
точностью δ > 0 (см. замечание). Как следствие, использование оценочных
сигналов в базовом законе управления обеспечит экспоненциальную сходи-
мость ошибок слежения с заданной скоростью в некоторую окрестность нуля
(3.7)
|e1(t)| ≤δ+ O(exp(-k1
t)), t > T.
Приведем последовательно решение указанных подзадач.
3.2. Синтез базового закона управления
Модель объекта управления (3.1) представлена в блочно-канонической
форме “вход-выход” и является управляемой. Для синтеза базового закона
управления целесообразно использовать блочный подход [4-7, 22], который в
отличие от стандартных методов позволяет непосредственно установить за-
данную скорость стабилизации ошибок слежения (3.4) на этапе синтеза.
Согласно идеологии блочного принципа запишем первое уравнение систе-
мы (3.1) относительно ошибки слежения ė1 = x2 - g2, где переменная x2 трак-
туется как фиктивное управление и выбирается в виде x2 = -k1e1 + g2, где
k1 = const > 0 заданный коэффициент усиления (3.4). Задача синтеза за-
ключается в выборе истинного управления, обеспечивающего стабилизацию
невязки между реальным и выбранным фиктивным управлением:
(3.8)
e2 = x2 - g2 + k1e1, e2 = (e21,e22,e23)T.
Относительно ошибки слежения и невязки (3.8) получим следующую си-
стему:
ė1 = -k1e1 + e2,
(3.9)
ė2 = q(x2,g2,g3,η) + B(θ,Ψ)u,
где
(3.10)
q(x2, g2, g3, η) = ag - g3 + k1 ė1 + η = ag - g3 + k1(x2 - g2
)+η.
В предположении, что не только все внутренние, но и внешние сигналы
известны, в терминах системы (3.7) сформируем закон комбинированного
управления с линейной стабилизирующей составляющей
(3.11)
u = -BT(θ,Ψ)(k2e2 + q(x2,g2,g3,η)), k2
= const > 0
51
и получим замкнутую линейную виртуальную систему (3.7), (3.9) вида
ė1 = -k1e1 + e2,
ė2 = -k2e2.
При k2 ≥ k1 переменные этой системы стремятся к нулю с заданной скоро-
стью
|e2(t)|
=
O(exp(-k2t)) ⇒ |e1(t)|
=
O(exp(-k1t)) ⇔ lim
x1(t) = g1(t),
t→+∞
t→+∞
t→+∞
поставленная задача (3.4) выполняется.
При реализации закона управления (3.11) по оценочным сигналам внеш-
них воздействий (3.5), (3.6) с учетом (3.8), (3.10) имеем
u = -B(θ,Ψ)T(k2(x2 - z2 + k1(x1 - g1)) + ag - z3 + k1(x2 - z2) + v0) =
(3.12)
= -BT(θ,Ψ)(k2e2 + q(x2,g2,g3
,η) + ϕ(t)),
где ϕ(t)
суммарный сигнал ошибок оценивания, |ϕ(t)| ≤ δ(k2 + k1 + 2),
t > T, с учетом которого замкнутая виртуальная система (3.9), (3.12) при-
нимает вид
ė1 = -k1e1 + e2,
ė2 = -k2e2 + ϕ(t),
а ее переменные при t > T последовательно сходятся в указанные окрестности
нуля:
δ(k2 + k1 + 2)
|e2(t)| ≤
+ O(exp(-k2t)) ⇒
k2
δ(k2 + k1 + 2)
⇒ |e1(t)| ≤
+ O(exp(-k1t)).
k2k2
Для решения задачи слежения с заданной точностью (3.7) потребуется
обеспечить при решении задач наблюдения (3.5), (3.6) следующую точность
оценивания:
δ(k2 + k1 + 2)
(3.13)
≤δ⇒δ≤δk2k2
k2k2
k2 + k1 + 2
3.3. Синтез наблюдателя возмущений
Используем возможности наблюдателей с кусочно-линейными корректи-
рующими воздействиями восстанавливать при определенных условиях внеш-
ние ограниченные сигналы (входы) без наличия их динамической модели (см.
второе неравенство (2.9)) и будем оценивать внешние возмущения по их воз-
действию на объект в процессе управления. В качестве основы для наблюда-
теля возмущений примем второе уравнение исходной системы (3.1)
x2 = ag + η + B(θ,Ψ)u,
52
где все параметры и сигналы, кроме η(t), известны. Наблюдатель-дифферен-
циатор строится как реплика этой системы с использованием всех известных
сигналов в виде
(3.14)
Ż0 = ag + B(θ,Ψ)u + v0, z0, v0 ∈ R3,
что приведет к следующей системе относительно ошибок наблюдения ε0 =
=x2 -z0 ∈R3 :
(3.15)
ε0 = η - v0.
Для решения поставленной задачи (3.5) используем кусочно-линейные
корректирующие воздействия
[
p sign(ε0j),
|ε0j | > 1/l;
(3.16)
v0j = p sat(lε0j) =
plε0j,
|ε0j | ≤ 1/l, j = 1, 3,
с одинаковыми (для простоты изложения) параметрами p, l = const > 0.
Установим в наблюдателе (3.14) следующие начальные условия
z0(0) = x2(0) ⇒ ε0(0) =0,
что сразу обеспечит нахождение ошибки наблюдения в линейной зоне.
Чтобы обеспечить |ε0(t)| ≤ 1/l на протяжении всего процесса при t ≥ 0, вы-
берем амплитуду корректирующих воздействий на основе достаточных усло-
вий сходимости в линейную зону, аналогичных первому выражению (2.16).
В силу (3.3) имеем:
(3.17)
εT0 ε0 = ε0(η - psign(ε0)) ≤ |ε0
| (H - p) < 0 ⇒ p > H.
Аналогично второму неравенству (2.16) получим первичную оценку для вы-
бора второго параметра, обеспечивающего заданную точность стабилизации
ошибки наблюдения:
|ε0(t)| ≤ 1/l < δ ⇒ l > 1/δ.
Более детально: в линейной зоне система (3.15)-(3.16) имеет вид ε0 = η -
-plε0, тогда
(3.18)
εT0 ε0 = εT0 (η - plε0) ≤ |ε0
| (H - plδ) < 0 ⇒ l > H/(pδ).
С учетом (3.17) нижняя оценка (3.18) меньше, чем первичная. Однако основ-
ная цель построения наблюдателя (3.14) обеспечить заданную точность
оценивания внешнего возмущения (3.5). С этой целью оценим решение систе-
мы (3.15), (3.16) на интервале [0; T ]:
|η(t)|
H
H
|ε0(T )| ≤
(1 + e-plT ) ≤
+
e-plT ⇒ pl |ε0(T)| ≤ H + He-plT .
pl
pl
pl
53
Из данного выражения с учетом v0(t) = plε0(t) следует, что при t ≥ T кор-
ректирующее воздействие сходится к оцениваемому сигналу с заданной точ-
ностью, если
1
H
|η2(t) - v0(t)| ≤ δ ⇔ He-plT ≤ δ ⇒ l >
ln
pT
δ
В итоге имеем нижнюю оценку для выбора большого коэффициента, при
котором обеспечивается стабилизация ошибок наблюдения и их производных
за заданное время
}
1
{H
1
H
(3.19)
l>
max
;
ln
,
p
δ
T
δ
что в совокупности с (3.18) и решает поставленную задачу (3.5). Заметим, что
для получения менее консервативных оценок следует рассматривать систему
(3.15)-(3.16) покомпонентно.
3.4. Синтез наблюдателя производных задающих воздействий
Основой для построения наблюдателя производных задающих воздей-
ствий является виртуальная модель (2.2), которая в данном случае имеет
три блока третьей размерности:
ġ1 = g2,
ġ2 = g3,
ġ3 = g4(t),
где g1(t) ∈ R3 измеряемый выход, gi ∈ R3, i = 2, 4, неизвестные ограни-
ченные сигналы (3.3). Для получения оценок первых g2(t) и вторых g3(t)
производных задающих сигналов с заданными показателями (3.6) исполь-
зуем стандартный наблюдатель с целью продемонстрировать процедуру его
настройки [3]. Выражения (2.3), (2.4), (2.8) в данном случае принимают вид:
(3.20)
Ż1 = z2 + v1,
Ż2 = z3 + v2,
Ż3 = v3, zi ∈ R3,
ε1 = ε2 - v1,
ε2 = ε3 - v2,
ε3 = g4(t) - v3,
(3.21)
εi = gi - zi = (εi1,εi2,εi3)T;
[
p1sign(ε1j),
|ε1j | > 1/l1;
v1j = p1sat(l1ε1j) =
p1l1ε1j,
|ε1j | ≤ 1/l1, p1, l1 = const > 0;
(3.22)
pisign(vi-1,j),
|vi-1,j| > 1/li;
vij = pjsat(ljεij) = pilivi-1,j,
|vi-1,j| ≤ 1/li, pi, li = const > 0,
i = 2,3, j = 1,3.
Установим в наблюдателе начальные условия z1(0) = g1(0), zi(0) =0,
i = 2,3. Допуская смену формы непрерывных задающих сигналов g1(t) в про-
цессе управления, для настройки параметров принимаются оценки началь-
ных условий системы (3.21), аналогичные (2.18):
(3.23)
|ε1(0)| ≤ δ,
|εi(0)| ≤ 2Gi
,
i = 2,3.
54
Разделим интервал оценивания на отрезки 0<t1 <t2 <t3 <t4 =T и
формализуем желаемое поведение переменных виртуальной системы (3.21)-
(3.22), обеспечивающее решение поставленной задачи (3.6)):
1) |ε1(t)| ≤ 1/l1 ≤ δ, t ≥ 0;
2) |ε2(t) - v1(t)| ≤ Δ2 < δ ⇔ v1(t) = ε2(t) - α2(t),
|α2(t)| ≤ Δ2, t ≥ t1;
3) |v1(t)| ≤ 1/l2 ⇔ |ε2(t)| ≤ Δ2 + 1/l2 ≤ δ, t ≥ t2;
(3.24)
4) |ε3(t) - v2(t)| ≤ Δ3 < δ ⇔ v2(t) = ε3(t) - α3(t),
|α3(t)| ≤ Δ3, t ≥ t3;
5) |v2(t)| ≤ 1/l3 ⇔ |ε3(t)| ≤ Δ3 + 1/l3 ≤ δ, t ≥ t4.
Нечетные неравенства в (3.24), которые означают попадание (и нахож-
дение) в линейные зоны аргументов соответствующих корректирующих воз-
действий (3.22), обеспечиваются выбором амплитуд pj , j = 1, 3. Вне линейных
зон система (3.21), (3.22) представима в виде:
ε1 = ε2 -p1sign(ε1),
ε2 = ε3 -p2sign(ε2 -α2),
ε3 = g4(t)-p3sign(ε3 -α3).
Достаточные условия для выбора амплитуд, аналогичные (2.16), в данном
случае имеют вид:
εTi εi = εTi(εi+1 - pisign(εi)) ≤ |εi| (|εi+1| - pi) < 0 ⇒ pi > |εi+1|,
(3.25)
i = 1,3, ε4 := g4.
Учитывая, что сходимость ошибок наблюдения εi(t), i = 2, 3, в указанные
области (3.24) гарантируется только при t > t2i-3 (3.24), определим области
их изменения с учетом (3.23):
|ε2(t)| ≤ E2 = 2G2 + (E3 + p2)t1,
|ε3(t)| ≤ E3 = 2G3 + (G4 + p3)t3, t ≥ 0.
С учетом (3.25) и данных оценок получим неравенства для последовательного
(снизу вверх) выбора амплитуд, которые обеспечивают на интервалах [t3; t4],
[t1; t2] сходимость ошибок наблюдения ε3(t), ε2(t) соответственно в указанные
области нуля (3.24), а также выполнение первого неравенства (3.24):
E3 - δ
2G3 + (G4 + p3)t3 - δ
p3 > G4 +
=G4 +
⇒
t4 - t3
t4 - t3
2G3 + G4t4 - δ
t4
⇒p3 >
,
t2 < t3 <
;
t4 - 2t3
2
(3.26)
E2 - δ
2G2 + (E3 + p2)t1 - δ
p2 > E3 +
=E3 +
⇒p2 >
t2 - t1
t2 - t1
2G2 + E3t2 - δ
2G2 + (2G3 + (G4 + p3)t3)t2 - δ
t2
>
=
,
0<t1 <
;
t2 - 2t1
t2 - 2t1
2
p1 > E2 = 2G2 + (E3 + p2)t1.
В неравенствах (3.26) продемонстрирована указанная в разделе 2 зависи-
мость выбора амплитуд в верхних уравнениях от принятых значений ампли-
туд в нижних уравнениях.
55
В линейных зонах в указанных интервалах система (3.21), (3.22) предста-
вима в виде:
ε1 = ε2 - p1l1ε1, t ≥ 0;
(3.27)
ε2 = ε3 - p2l2(ε2 - α2), t ≥ t2;
ε3 = g4(t) - p3l3(ε3 - α3), t ≥ t4.
Из достаточных условий устойчивости аналогично (3.18) получим нера-
венства для выбора больших коэффициентов наблюдателя, обеспечивающих
заданную точность стабилизации ошибок наблюдения (3.21):
εT1 ε1 ≤ |ε1|(E2 - p1l1|ε1|) < 0 ⇒ l1 > E2/(p1δ),
εT2 ε2 ≤ |ε2|(E3 - p2l2(|ε2| - Δ2)) < 0 ⇒ l2 > E3/(p2(δ - Δ2)),
εT3 ε3 ≤ |ε3|(G4 - p3l3(|ε3| - Δ3)) < 0 ⇒ l3 > G4/(p3(δ - Δ3)).
Для оценок больших коэффициентов, обеспечивающих выполнение чет-
ных неравенств (3.24) (т.е. стабилизацию производных ошибок наблюдения
ε1(t),
˙ε2(t)), оценим решения первого и второго уравнения системы (3.27) на
интервалах [0; t1], [t2; t3] соответственно:
E2
p1 - E2
|ε1(t1)| ≤
+
e-p1l1t1 ⇒ |ε2(t) - v1(t)| ≤ Δ2 ⇔
p1l1
p1l1
1
p1 - E2
⇔ (p1 - E2)e-p1l1t1 ≤ Δ2 ⇒ l1 >
ln
;
t1p1
Δ2
E3
p2 - E3
|ε2(t3)| ≤
+Δ2 +
e-p2l2(t3-t2) ⇒
|ε3(t) - v2(t)| ≤ Δ3 ⇔
p2l2
p2l2
1
p2 - E3
⇔ (p2 - E3)e-p2l2(t3-t2) ≤ Δ3 ⇒ l2 >
ln
(t3 - t2)p2
Δ3
С учетом данных оценок приведем последовательность действий при на-
стройке параметров наблюдателя (3.21), (3.22), обеспечивающих (3.24) и, сле-
довательно, цель наблюдения (3.6):
1) исходя из заданного времени оценивания T > 0, с учетом t1 < t2/2,
t3 < t4/2 зафиксировать моменты времени 0 < t1 < t2 < t3 < t4 = T;
2) выбрать значения амплитуд pi, i = 3, 1, на основе нижних оценок (3.26);
3) принять значение 0 < Δ3 < δ и на основе нижней оценки выбрать
G4
(3.28)
l3 >
;
p3(δ - Δ3)
4) принять значение 0 < Δ2 < δ и на основе нижней оценки выбрать
{
}
1
E3
1
p2 - E3
(3.29)
l2 >
max
;
ln
;
p2
δ-Δ2
t3 - t2
Δ3
5) на основе нижней оценки выбрать
}
1
{E2
1
p1 - E2
(3.30)
l1 >
max
;
ln
p1
δ
t1
Δ2
56
3.5. Результаты моделирования
Для численного моделирования разработанных алгоритмов (которое про-
водилось в среде MATLAB-Simulink с методом интегрирования Эйлера с по-
стоянным шагом 0,001) были использованы параметры микро БПЛА весом
до 5 кг, поднимающегося на высоту до 5 км. Электрический двигатель может
обеспечить ему скорость до 95 км/ч (26 м/c), в воздухе способен находиться
до одного часа. Подобные летательные аппараты выполняют разведыватель-
ные функции и предоставляют информацию о текущей обстановке.
Для системы (3.1) с начальными условиями x1(0) = (0; 100; 1)T метров при
действии внешних возмущений
η1(t) = 0,2sin(t), η2(t) = 0,24sin(t), η1(t) = 0,9cos(t)
ставилась задача вывода центра масс БПЛА на пространственную траекто-
рию:
(3.31)
g11(t) = 3sin(πt/3), g12(t) = t+100, g13
(t) = 3 cos(πt/3), t = [0; 3) с;
g11(t) = t2 - 9, g12(t) = t + 100, g13(t) = t - 6, t ≥ 3 с.
В законе управления (3.11) были приняты следующие коэффициенты уси-
ления: k1 = diag(64; 66; 65), k2 = diag(67; 66; 65).
Для наблюдателя возмущений (3.14) на основе (3.18)-(3.19) были приняты
следующие параметры корректирующих воздействий (3.16): p = 4, l = 180.
Для наблюдателя производных задающих сигналов (3.20) на основе (3.26),
(3.28)-(3.30) были приняты следующие параметры корректирующих воздей-
ствий (3.22): p1 = 13, l1 = 100; p2 = 8, l2 = 100; p3 = 4, l3 = 100.
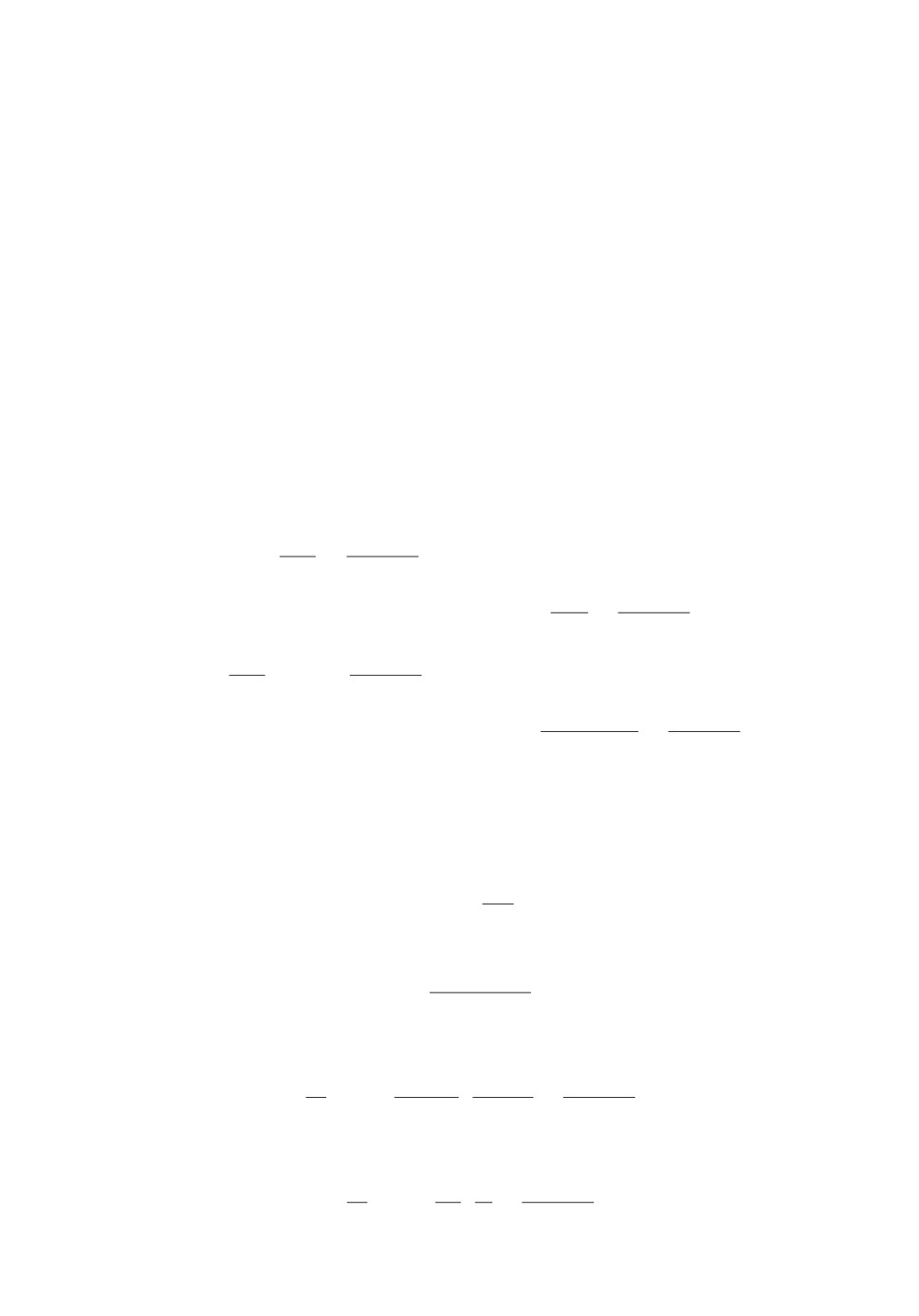
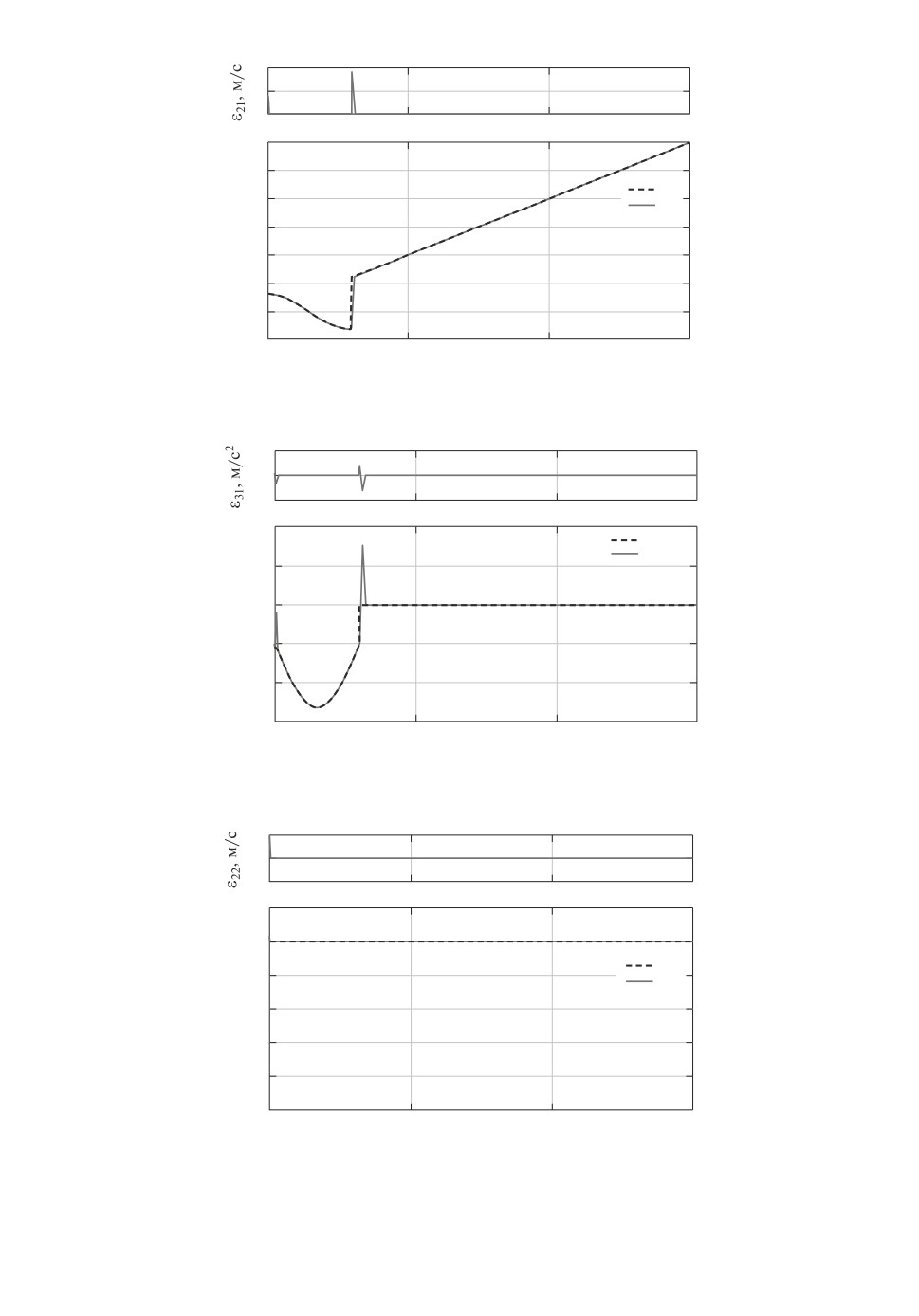
На рис. 1-6 показаны графики первых g2i(t) и вторых g3i(t) производ-
ных задающих воздействий и их оценок z2i(t), z3i(t), полученных с помощью
дифференциатора (3.20), а также ошибок наблюдения ε2i(t) метров в секунду,
ε3i(t) метров за секунду в квадрате, i = 1,2,3.
Как видно из рис. 1-2 и 5-6, в момент t = 3 с при смене формы задающих
сигналов g11(t), g13(t), приводящей к точкам конечного разрыва производ-
ных, имеют место небольшие всплески оценочных сигналов, ошибки наблю-
дения в установившемся режиме составляют |ε2i| ≤ 10-7 метров в секунду,
|ε3i| ≤ 5 · 10-5 метров за секунду в квадрате.
Заметим, что результаты моделирования дифференциатора (2.10), (2.12)
с выходом (3.31) практически не отличаются от представленных на рис. 1-6.
При использовании наблюдателя (2.3) с глубокой обратной связью (2.7), обес-
печивающего такую же точность оценивания, всплески оценочных сигналов
вторых производных оказались на порядок больше [23].
Следует отметить, что на практике задающие воздействия должны быть
допустимыми для конкретного объекта управления (2.1), в частности, доста-
точно гладкими, что обеспечивается на этапе планировании траекторий. С це-
лью продемонстрировать работоспособность дифференциатора производных
кусочно-дифференцируемых функций рассмотрена нештатная ситуация с ис-
пользованием непрерывных, но негладких задающих воздействий (3.31). Учи-
тывая, что в законах управления (3.11), (3.12) используется линейная стаби-
57
10
5
0
5
10
15
30
25
g21
20
z21
15
10
5
0
-50
5
10
15
t, с
Рис. 1. Графики g21(t), z21(t), ε21(t) м/c.
5
0
-5
0
5
10
15
6
g31
z31
4
2
0
-2
-
40
5
10
15
t, с
Рис. 2. Графики g31(t), z31(t), ε31(t) м/c2.
1
0
-1
0
5
10
15
1,2
1,0
g22
0,8
z22
0,6
0,4
0,2
0
5
10
15
t, с
Рис. 3. Графики g22(t), z22(t), ε22(t) м/c.
58
1
0
-1
0
5
10
15
0,6
g32
0,5
z32
0,4
0,3
0,2
0,1
0
-0,1
0
5
10
15
t, с
Рис. 4. Графики g32(t), z32(t), ε32(t) м/c2.
2
0
-2
0
5
10
15
2
1
g23
0
z23
-1
-2
-3
-4 0
5
10
15
t, с
Рис. 5. Графики g23(t), z23(t), ε23(t) м/c.
5
0
-5
0
5
10
15
4
g33
z33
2
0
-2
-4
0
5
10
15
t, с
Рис. 6. Графики g33(t), z33(t), ε33(t) м/c2.
59
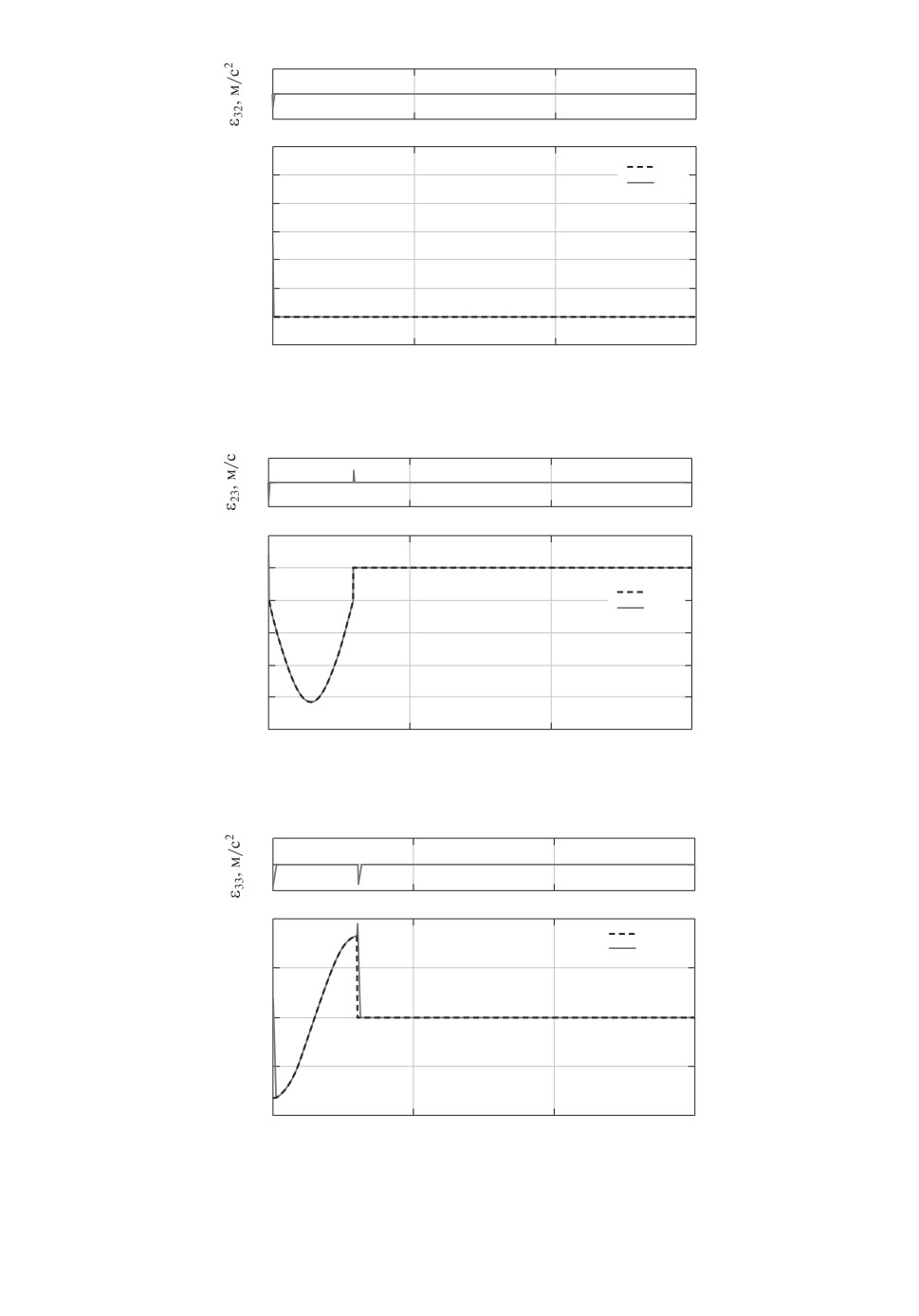
u1
u2
u3
4
4
4
3
3
3
2
2
2
1
1
1
0
0
0
-1
-1
-1
-2
-2
-2
-3
-3
-3
-4
0
5
10
15
-40
5
10
15
-40
5
10
15
t, с
t, с
t, с
Рис. 7. Графики управлений для системы с динамической обратной связью.
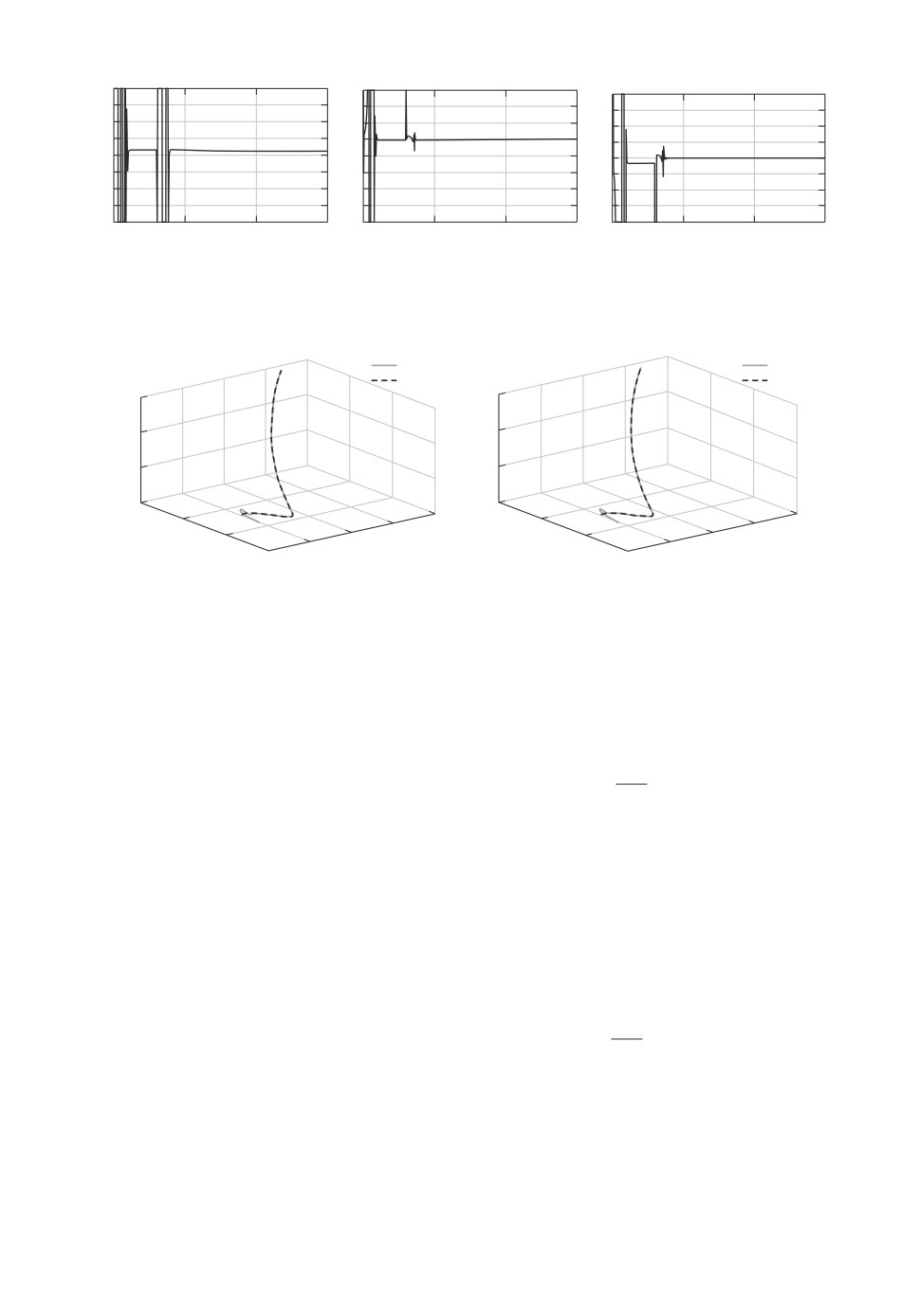
a
б
x1
x1
H, м
g1
H, м
g1
115
115
110
110
105
105
100
100
10
10
300
300
5
200
5
200
0
100
0
100
Z, м
Z, м
-5 -1000
-5 -1000
L, м
L, м
Рис. 8. Пространственные графики заданной траектории g1(t) и изображаю-
щей точки x1(t): эталонной системы (а); системы с динамической обратной
связью (б).
лизирующая составляющая, для снижения перегрузок в начале переходных
процессов при моделировании управляющие воздействия были ограничены:
(3.32)
Ui = 4sat(ui),
Ui = 4sat(ui
),
i = 1,3.
Графики управлений с указанными ограничениями для системы с динамиче-
ской обратной связью представлены на рис. 7.
На рис. 8,а показан эталонный процесс отслеживания центром масс x1(t)
заданной пространственной траекторией g1(t) с базовым законом управления
(3.11), (3.32) в предположении, что все внешние сигналы и их производные
известны. На рис. 8,б показан график изображающей точки замкнутой си-
стемы (3.1) с динамической обратной связью (3.12), (3.32) с наблюдателями
возмущений (3.14) и производных заданий (3.20).
В таблице для ошибок слежения e1i = x1i - g1i, i = 1, 3, эталонной системы
и системы с динамической обратной связью на интервалах t ∈ [0; 3)/t ≥ 3 c
представлены: величина перерегулирования e1max,i ≥ |e1i(t)|; время регули-
рования ti: |e1i(t)| ≤ 0,01 м, t ≥ ti, а также точность в установившемся режи-
ме Δi ≥ |e1i(t)| при t → 3 - 0/t ≥ 10 с. Показатели системы с наблюдателями
практически не отличаются от показателей эталонной системы, что подтвер-
ждает эффективность разработанных алгоритмов оценивания внешних сиг-
налов.
60
Таблица. Показатели регулирования ошибок слежения
Сигнал
Эталонная система (3.1), (3.11) t ∈ [0; 3)/t ≥ 3 с
e1max,i, м
ti, c
Δi, м
e11 = x11 - g11
0,35/0,7
0,97/3,83
6 · 10-4/8 · 10-4
e12 = x12 - g12
0,3/0,083
0,84/3,77
3, 5 · 10-4/3, 2 · 10-5
e13 = x13 - g13
0,6/0,095
0,97/3,77
3, 15 · 10-4/3, 1 · 10-5
Система (3.1) с динамической обратной связью
Сигнал
(3.12), (3.14), (3.20) t ∈ [0; 3)/t ≥ 3 с
e1max,i, м
ti, c
Δi, м
e11 = x11 - g11
0,36/0,78
1/3,837
6 · 10-4/8 · 10-4
e12 = x12 - g12
0,35/0,084
0,85/3,79
3, 5 · 10-4/3, 2 · 10-5
e13 = x13 - g13
0,6/0,092
1/3,79
3, 6 · 10-4/3, 1 · 10-5
4. Заключение
Использование теории наблюдателей состояния на основе виртуальных мо-
делей является конструктивной альтернативой по отношению к численному
дифференцированию сигналов. При этом пространство состояний замкну-
той системы расширяется только за счет порядка наблюдателей и не требует
построения реальных динамических генераторов внешних воздействий и за-
дающих сигналов. Предложенный подход, с одной стороны, обобщает случай,
когда дифференцируемый сигнал порождается известной динамической мо-
делью, до робастной постановки. С другой стороны, введение виртуальной
динамической модели и получение оценок ее вектора состояния на основе
теории робастных наблюдателей позволяют исключить или по крайней ме-
ре не учитывать динамику такого дифференциатора при синтезе обратной
связи, что является важным преимуществом по сравнению с использованием
устройств непосредственного дифференцирования.
Предложенный подход апробирован на примере синтеза системы управ-
ления беспилотным летательным аппаратом пространственной траектории,
заданной в виде вектора целевых сигналов для путевых координат. Предла-
гаемый подход к получению информации о производных задающего сигна-
ла обобщает случаи, когда траектория движения задается и когда задание
формируется в текущий момент времени (последнее актуально, например, в
задачах преследования, наведения и т.п.). Результаты моделирования под-
тверждают эффективность использования предложенного подхода.
ПРИЛОЖЕНИЕ
Доказательство теоремы. Учитывая специфику решаемой задачи,
без ограничения общности примем в системе (2.11) начальные условия в виде
(2.18), а именно:
(Π.1)
|ε1(0)| ≤ δ,
|εi(0)| ≤ 2Gi,
2Gi
≫ δ, i = 2, n + 1.
Разделим отрезок времени [0; T ] на 2n отрезков с помощью точек 0 =
= t0 < t1 < t2 < ... < t2n-1 < t2n = T и формализуем во времени желаемое
61
поведение ошибок наблюдения и их производных, обеспечивающих выполне-
ние (2.19):
|ε1(t)| ≤ δ, t ≥ t0, | ε1(t)| ≤ Δ1,1, t ≥ t1, |ε1(t)| ≤ Δ1,2, t ≥ t2,
...,|ε(n)1(t)| ≤ Δ1,n, t ≥ tn,
|ε2(t)| ≤ δ, t ≥ t2, | ε2(t)| ≤ Δ2,1, t ≥ t3, |ε2(t)| ≤ Δ2,2, t ≥ t4,
...,|ε(n-1)2(t)| ≤ Δ2,n-1, t ≥ tn+1,
|ε3(t)| ≤ δ, t ≥ t4, | ε3(t)| ≤ Δ3,1, t ≥ t5, |ε3(t)| ≤ Δ3,2, t ≥ t6,
...,|ε(n-2)3(t)| ≤ Δ3,n-2, t ≥ tn+2,
(Π.2)
|εn-1(t)| ≤ δ, t ≥ t2(n-1)-2, | εn-1(t)| ≤ Δn-1,1, t ≥ t2(n-1)-1,
|εn-1(t)| ≤ Δn-1,2, t ≥ t2(n-1);
|εn(t)| ≤ δ, t ≥ t2n-2, | εn(t)| ≤ Δn,1, t ≥ t2n-1;
Δi,j < δ, i = 1,n, j = 1,n + 1 - i;
|εn+1(t)| ≤ δ, t ≥ t2n.
C учетом (2.13), (2.15) конкретизируем первые неравенства в строках
(П.2), предполагая, что на предыдущих интервалах указанные соотношения
были выполнены:
|ε1(t)| ≤ 1/l1 ≤ δ, t ≥ t0;
(Π.3)
|vi-1(t) - zi(t)| = |εi(t) - εi-1(t)| ≤ 1/li ⇔ |εi(t)| ≤ 1/li + Δi-1,1 ≤ δ,
t ≥ t2i-2, i = 2,n + 1.
Сходимость аргументов корректирующих воздействий в линейные зоны (П.3)
обеспечивается выбором амплитуд pi > 0, а размеры линейных зон и выпол-
нение остальных, вспомогательных неравенств (П.2) выбором больших ко-
эффициентов li > 0, i = 1, n + 1.
Как было отмечено, в системе (2.11)-(2.12) по построению |ε1(0)| ≤ δ и
sign(v1(t)) = sign(ε1(t)), t ≥ 0, требуется обеспечить первое неравенство (П.3)
выбором p1 > 0, который совпадает с первичной настройкой (первое неравен-
ство (2.16)), а именно
(Π.4)
ε1 ε1 = ε1(g2 - p1sign(ε1)) ≤ |ε1|(G2 - p1) < 0 ⇒ p1 > G2.
В остальных уравнениях системы (2.11) совпадение знаков sign(vi(t)) =
= sign(εi(t)), i = 2,n + 1, может не иметь места при 0 ≤ t ≤ t2(i-1)-1 и гаран-
тируется только при t > t2(i-1)-1 вне окрестности |εi| ≤ Δi-1,1. Это означает,
что в общем случае значения εi(t) растут по модулю на интервале [0; t2(i-1)-1],
нужно обеспечить их сходимость в области (П.3) за время t2(i-1) - t2(i-1)-1
выбором pi, i = 2, n + 1. Детализируем первичную настройку амплитуд с уче-
62
том начальных условий (П.1) и заданного времени сходимости:
ε
i(t2(i-1)-1)
pi ≥
+Gi+1,
t2(i-1) - t2(i-1)-1
εi(t2(i-1)-1)≤2Gi + (Gi+1 + pi)t2(i-1)-1,
i = 2,n + 1,t ≥ 0.
Отсюда имеем
2Gi + (Gi+1 + pi)t2(i-1)-1
(Π.5)
pi ≥
+Gi+1 ⇒
t2(i-1) - t2(i-1)-1
2Gi + Gi+1t2(i-1)
⇒pi ≥
,
i = 2,n + 1,
t2(i-1) - 2t2(i-1)-1
где 2t2(i-1)-1 < t2(i-1). Положим, например, все нечетные временные интерва-
лы одинаковыми Δt = t2i-1 - t2i-2 > 0, i = 1, n, а для четных установим Δt =
= t2(i-1) - 2t2(i-1)-1, i = 2,n + 1, тогда
(Π.6)
t2(i-1) - t2(i-1)-1 = (3 · 2i-2
− 1)Δt, i = 2, n + 1,
откуда имеем верхнюю оценку для выбора Δt > 0:
T
t2n = 3(1 + 2 + 22 + 23 + ... + 2n-1)Δt ≤ T ⇒ 0 < Δt ≤
(Π.7)
3(2n - 1)
С учетом (П.4)-(П.7) имеем нижние оценки для выбора амплитуд, обеспе-
чивающих сходимость аргументов корректирующих воздействий в линейные
зоны (П.3) за заданное время:
2Gi + Gi+13(2i-1 - 1)Δt
2Gi
p∗1 = G2, p∗i =
=
+ 3(2i-1 - 1)Gi+1,
(Π.8)
Δt
Δt
i = 2,n + 1.
Еще раз отметим, что в отличие от (3.26) в дифференциаторе (2.10), (2.12)
амплитуды выбираются независимо друг от друга.
Для настройки больших коэффициентов рассмотрим уравнения системы
(2.11)-(2.12) с учетом (2.13) в линейных зонах, куда они попадают в указан-
ные интервалы времени:
ε1 = g2 - p1l1ε1,
|ε1| ≤ 1/l1, t ≥ 0,
(Π.9)
εi = gi+1 - pili(εi - εi-1),
|εi - εi-1| ≤ 1/li, t ≥ t2i-2, i = 2, n + 1.
Из достаточных условий сходимости εi εi < 0 найдем нижние оценки для
выбора li > 0, i = 1, n + 1, обеспечивающих заданную точность оценивания
(2.19), а также установим точность, которую надо обеспечить при стабилиза-
ции первых производных ошибок оценивания, разделив заданную величину δ
63
на две части, например пополам:
G2
|ε1(t)| ≤ δ(t ≥ 0) ⇒ l1 ≥
;
p1δ
Gi+1
2Gi+1
|εi(t)| ≤
+|εi-1|
≤ δ(t ≥ t2i-2) ⇒ li ≥
,
(Π.10)
pili
| {z }
piδ
| {z }
δ/2
δ/2
δ
|εi-1| ≤ Δi-1,1 =
,
i = 2,n + 1.
2
Далее для обеспечения стабилизации с заданной точностью за заданное
время производных ошибок наблюдения (П.2) рассмотрим итерационную
процедуру, состоящую из n шагов, где n максимальный порядок учиты-
ваемых производных.
Шаг 1. Выбором li, i = 1,n, нужно также обеспечить сходимость первых
производных ошибок наблюдения εi(t) в установленные области (П.10) за вре-
мя t2i-1 - t2i-2 = Δt (П.2) из начальных условий | εi(t2i-2)| = Gi+1 + pi (П.9).
С этой целью оценим на указанных интервалах решения вспомогательной
системы
(Π.11)
ε1 = g3 - p1l1 ε1;
εi = gi+2 - pili( εi - εi-1
),
i = 2,n,
и установим точность, которую надо обеспечить при стабилизации вторых
производных ошибок оценивания, разделив величины Δi,1 = δ/2 на части,
например указанным образом:
G3
δ
|ε1(t)| ≤ (G2 + p1)e-p1l1Δt
+
≤Δ1,1 =
(t ≥ t1) ⇒
|
{z
}
p1l1
2
|{z}
δ/4
δ/4
}
1
{ 4G3
1
4(G2 + p1)
⇒l1 ≥
max
;
ln
;
p1
δ
Δt
δ
Gi+2
δ
(Π.12)
| εi(t)| ≤ (Gi+1 + pi)e-piliΔt
+
+|εi-1|
≤Δi,1 =
(t ≥ t2i-1) ⇒
|
{z
}
pili
| {z }
2
| {z }
δ/8
δ/4
δ/8
}
1
{ 8Gi+2
1
8(Gi+1 + pi)
⇒li ≥
max
;
ln
,
pi
δ
Δt
δ
δ
|εi-1| ≤ Δi-1,2 =
,
i = 2,n.
4
Шаг 2. Выбором li, i = 1,n - 1, нужно также обеспечить сходимость
вторых производных ошибок наблюдения
εi(t) в установленные области
(П.12) за время t2i - t2i-1 = (3 · 2i-1 - 1)Δt (П.2), (П.6) из начальных условий
|εi(t2i-1)| = Gi+2 + pi (П.11). С этой целью оценим на указанных интервалах
решения вспомогательной системы
εi-1), i = 2,n - 1,
64
а также установим точность, которую надо обеспечить при стабилизации тре-
тьих производных ошибок оценивания, разделив величины Δi,2 = δ/4, напри-
мер, аналогично (П.12):
G4
δ
|ε1(t)| ≤ (G3 + p1)e-p1l12Δt
+
≤
(t ≥ t2) ⇒
|
{z
}
p1l1
4
|{z}
δ/8
δ/8
}
1
{ 8G4
1
8(G3 + p1)
⇒l1 ≥
max
;
ln
;
p1
δ
2Δt
δ
δ
Gi+3
|εi(t)| ≤ (Gi+2 + pi)e-pili(3·2i-1-1)Δt
+
+
εi-1
≤Δi,2 =
(t ≥ t2i) ⇒
|
{z
}
pili
| {z }
4
| {z }
δ/16
δ/8
δ/16
}
1
{ 16Gi+3
1
16(Gi+2 + pi)
⇒li ≥
max
;
ln
,
pi
δ
(3 · 2i-1 - 1)Δt
δ
εi-1≤Δi-1,3 =δ
,
i = 2,n - 1,
8
и т.д. На каждом шаге количество рассматриваемых больших коэффициен-
тов и размерность вспомогательных систем понижаются на единицу. Таким
образом, на последнем n-м шаге выбором l1 нужно обеспечить сходимость
ε(n)1(t) в область, установленную на предыдущем шаге, например, указанным
выше образом Δ1,n = δ/2n за время tn - tn-1 (П.2) из начальных условий
|ε(n)1(tn-1)| = Gn+1 + p1. Оценка решения вспомогательного уравнения
ε(n+1)1 = gn+2 - p1l1ε(n)1
дает следующий результат:
n)
Gn+2
δ
ε(
(t)
≤ (Gn+1 + p1)e-p1l1(tn-tn-1)Δt
+
≤
⇒
1
|
{z
}
p1l1
2n
| {z }
δ/2n+1
δ/2n+1
}
1
{2n+1Gn+2
1
2n+1(Gn+1 + p1)
⇒l1 ≥
max
;
ln
p1
δ
(tn - tn-1)Δt
δ
Здесь если n нечетное число, то tn - tn-1 = Δt, если четное, то tn - tn-1 =
= (3 · 2n/2-1 - 1)Δt.
Учитывая, что логарифмическая функция очень медленно возрастает,
множитель при Δt, определяющий длину четного интервала (П.6), есть нату-
ральное число и 1/Δt > 1/((3 · 2i-1 - 1)Δt), можно упростить конечный ре-
зультат, полагая этот множитель равным единице в формулах, полученных
на четных шагах.
Неравенства для выбора больших коэффициентов (П.10) и типа (П.12), по-
лученные на разных шагах процедуры, должны выполняться одновременно.
С учетом указанного упрощения объединим их и получим итоговые ниж-
ние оценки, при которых поставленная задача (2.19) обеспечивается с учетом
65
быстрых движений и погрешностей уравнений статики:
}
2Gn+2
1
{2Gn+1
8Gn+2
1
8(Gn+1 + pn)
(Π.13) l∗n+1 =
,
l∗n =
max
;
;
ln
,
pn+1δ
pn
δ
δ
Δt
δ
1
{ 2Gn
8Gn+1
16Gn+2
1
8(Gn + pn-1)
l∗n-1 =
max
;
;
;
ln
;
pn-1
δ
δ
δ
Δt
δ
}
1
16(Gn+1 + pn-1)
ln
,
Δt
δ
1
{ 2G4
23G5
24G6
2nGn+2
l∗3 =
max
;
;
;...;
;
p3
δ
δ
δ
δ
}
1
23(G4 +p3)
1
24(G5 +p3)
1
2n(Gn+1 + p3)
ln
;
ln
;...;
ln
,
Δt
δ
Δt
δ
Δt
δ
1
{ 2G3
23G4
24G5
2n+1Gn+2
l∗2 =
max
;
;
;...;
;
p2
δ
δ
δ
δ
}
1
23(G3 +p2)
1
24(G4 +p2)
1
2n+1(Gn+1 + p2)
ln
;
ln
;...;
ln
,
Δt
δ
Δt
δ
Δt
δ
1
{G2
22G3
23G4
2n+1Gn+2
l∗1 =
max
;
;
; ...;
;
p1
δ
δ
δ
δ
}
1
22(G2 +p1)
1
23(G3 +p1)
1
2n+1(Gn+1 + p1)
ln
;
ln
;...;
ln
Δt
δ
Δt
δ
Δt
δ
Таким образом, существуют такие p∗i (П.8) и l∗i (П.13), что для любых
pi, li: pi > p∗i, li > l∗i, i = 1,n + 1, неравенства (2.19) будут выполнены. Теоре-
ма доказана.
Следует отметить, что оценки для выбора больших коэффициентов (П.13),
полученные из достаточных условий, могут оказаться достаточно консерва-
тивными, особенно для систем (2.11) большой размерности. При практиче-
ском применении данной процедуры рекомендуется опираться на заданные
значения Gi, i = 2, n + 2, δ > 0, T > 0 и при необходимости снижения расчет-
ных оценок:
учитывать множители при Δt в формулах, полученных на четных шагах
процедуры;
использовать другой способ разделения Δi,j (i = 1, n, j = 1, n + 1 - i) на
части, отводя меньшую долю при оценке затухающих собственных движений
производных.
Обратим внимание, что введенный прием с разделением на части областей
сходимости производных ошибок наблюдения позволил сделать независимым
друг от друга выбор больших коэффициентов (П.13). Можно использовать
другую, связную процедуру настройки, в ходе которой последовательно (сни-
зу вверх) из достаточных условий фиксируются значения l∗i, i = n + 1, 1,
с учетом которых области сходимости старших производных определяются
по остаточному принципу. Такая процедура будет более трудоемкой, но мо-
жет привести к менее консервативным расчетным оценкам.
66
СПИСОК ЛИТЕРАТУРЫ
1.
Wonham W.M. Linear Multivariable Control: a Geometric Approach. N.Y.: Springer-
Verlar, 1979.
2.
Фомичев В.В., Высоцкий А.О. Алгоритм построения каскадного асимптотиче-
ского наблюдателя для системы с максимальным относительным порядком //
ДУ. 2019. Т. 55. № 4. С. 567-573.
Fomichev V.V., Vysotskii A.O. Algorithm for Designing a Cascade Asymptotic Ob-
server for a System of Maximal Relative Order // Differ. Equations. 2019. V. 55.
No. 4. P. 553-560.
3.
Краснов Д.В., Уткин А.В. Синтез многофункциональной системы слежения в
условиях неопределенности // УБС. 2017. Вып. 69. С. 29-49.
Krasnov D.V., Utkin A.V. Synthesis of a Multifunctional Tracking System in Con-
ditions of Uncertainty // Autom. Remote Control. 2019. V. 80. No. 9. P. 1704-1716.
4.
Краснова С.А., Уткин В.А., Уткин А.В. Блочный подход к анализу и синтезу
инвариантных нелинейных систем слежения // АиТ. 2017. № 12. С. 26-53.
Krasnova S.A., Utkin V.A., Utkin A.V. Block Approach to Analysis and Design of
the Invariant Nonlinear Tracking Systems // Autom. Remote Control. 2017. V. 78.
No. 12. P. 2120-2140.
5.
Антипов А.С., Краснов Д.В., Уткин А.В. Декомпозиционный синтез системы
управления электромеханическими объектами в условиях неполной информа-
ции // ПММ. 2019. Т. 83. Вып. 4. С. 530-548.
Antipov A.S., Krasnov D.V., Utkin A.V. Decomposition Synthesis of the Control
System of Electromechanical Objects in Conditions of Incomplete Information //
Mechanics of Solids. 2019. V. 54. No. 5. P. 47-60.
6.
Уткин В.А. Инвариантность и автономность в системах с разделяемыми дви-
жениями // АиТ. 2001. № 11. С. 73-94.
Utkin V.A. Invariance and Independence in Systems with Separable Motion // Au-
tom. Remote Control. 2001. V. 62. No. 11. P. 1825-1843.
7.
Kochetkov S.A., Krasnova S.A., Antipov A.S. Cascade Synthesis of Electromechan-
ical Tracking Systems with Respect to Restrictions on State Variables // IFAC-
PapersOnLine. 2017. V. 50. No. 1. P. 1042-1047.
8.
LaValle S.M. Planning Algorithms. Cambridge University Press, 2006.
9.
De Filippis L., Guglieri G., Quagliotti F. Path Planning Strategies for UAVS in 3D
Environments // J. of Intelligent and Robotic Systems. 2012. V. 65. No. 1. P. 247-264.
10.
Гилимьянов Р.Ф., Рапопорт Л.Б. Метод деформации пути в задачах планиро-
вания движения роботов при наличии препятствий // ПУ. 2012. № 1. С. 70-76.
Gilimyanov R.F., Rapoport L.B. Path Deformation Method for Robot Motion Plan-
ning Problems in the Presence of Obstacles // Autom. Remote Control. 2013. V. 74.
No. 12. P. 2163-2172.
11.
Kamyar K., Taheri E. Aircraft Optimal Terrain/Threat-Based Trajectory Planning
and Control // J. of Guidance, Control, and Dynamics. 2014. V. 37. No. 2. P. 466-483.
12.
Ткачев С.Б., Крищенко А.П., Канатников А.Н. Автоматическая генерация
сложных пространственных траекторий БПЛА и синтез управлений // Мате-
матика и математическое моделирование. МГТУ им. Н.Э. Баумана. Электрон.
журн. 2015. № 01. С. 1-17.
Tkachev S.B., Krishenko A.P., Kanatnikov A.N. Automatic Generation of Com-
plex Spatial Trajectories of the UAV and Synthesis of Control // Mathematics and
Mathematical Modelling of the Bauman MSTU. 2015. No. 01. P. 1-17.
67
13.
Емельянов С.В., Афанасьев А.П. Дифференцирование сигнала в системах ав-
томатического регулирования // АиТ. 2015. № 12. С. 27-42.
Emel’yanov S.V., Afanas’ev A.P. Signal Differentiation in Automatic Control Sys-
tems // Autom. Remote Control. 2015. V. 76. No. 12. P. 2110-2123.
14.
Utkin V.A., Krasnova S.A. Improving the Accuracy of the Estimated Signalsin the
State and Disturbance Observer // Proc. of the Twelfth Int. Conf. “Management
of large-scale system development” (MLSD). 1-3 October, 2019. Moscow, Russia,
V.A. Trapeznikov Institute of Control Sciences. IEEE Xplore, 2019. 4 p.
15.
Краснова С.А., Кузнецов С.И. Оценивание на скользящих режимах неконтро-
лируемых возмущений в нелинейных системах // АиТ. 2005. № 10. С. 54-69.
Krasnova S.A., Kuznetsov S.I. Incontrollable Perturbations on Nonlinear Dynamic
Systems: Estimation on Moving Modes // Autom. Remote Control. 2005. V. 66.
No. 10. Р. 1580-1593.
16.
Краснова С.А. Оценивание внешних возмущений на основе виртуальных дина-
мических моделей // УБС. 2018. Вып. 76. С. 6-25.
Krasnova S.A. Estimating the Derivatives of External Perturbations Based on Vir-
tual Dynamic Models // Autom. Remote Control. 2020. V. 81. No. 5. P. 897-910.
17.
Никифоров В.О. Наблюдатели внешних детерминированных возмущений. Ч. 2.
Объекты с неизвестными параметрами // АиТ. 2004. № 11. С. 40-48.
Nikiforov V.O. Observers of External Deterministic Disturbances. P. II. Objects with
Unknown Parameters // Autom. Remote Control. 2004. V. 65. No. 11. P. 1724-1732.
18.
Дылевский А.В., Лозгачев Г.И. Применение метода пространства состояний для
синтеза дифференциаторов // АиТ. 1999. № 9. С. 13-20.
Dylevskii A.V., Lozgachev G.I. State Space Approach to the Design of Differentia-
tors // Autom. Remote Control. 1999. V. 60. No. 9. P. 1222-1229.
19.
Уткин В.А., Уткин А.В. Задача слежения в линейных системах с параметри-
ческими неопределенностями при неустойчивой нулевой динамике // АиТ. 2014.
№ 9. С. 62-81.
Utkin V.A., Utkin A.V. Problem of Tracking in Linear Systems with Parametric Un-
certainties under Unstable Zero Dynamics // Autom. Remote Control. 2014. V. 75.
No. 9. P. 1577-1592.
20.
Levant A. Higher-Order Sliding Modes, Differentiation and Output-Feedback Con-
trol // Int. J. Control. 2003. V. 76. No. 9. P. 924-941.
21.
Khalil H.K., Praly L. High-Gain Observers in Nonlinear Feedback Control // Int. J.
Robust and Nonlinear Control. 2014. V. 24. No. 6. P. 993-1015.
22.
Кокунько Ю.Г., Краснов Д.В., Уткин А.В. Два метода синтеза наблюдателей
состояния и возмущений для беспилотного летательного аппарата // ПУ. 2020.
№ 1. С. 3-16.
23.
Кокунько Ю.Г., Антипов А.С., Краснова С.А. Наблюдатели состояния как сред-
ство оценивания производных детерминированных сигналов // Матер. XXXII
конф. памяти выдающегося конструктора гироскопических приборов Н.Н. Ост-
рякова, 13-я Мультиконференция по проблемам управления (МКПУ-2020),
Санкт-Петербург, 6-8 октября 2020 г. СПб.: АО “Концерн “ЦНИИ “Электро-
прибор”, 2020. С. 312-315.
Статья представлена к публикации членом редколлегии П.В. Пакшиным.
Поступила в редакцию 09.08.2020
После доработки 20.01.2021
Принята к публикации 16.03.2021
68