Автоматика и телемеханика, № 7, 2021
Нелинейные системы
© 2021 г. В.А. АЛЕКСАНДРОВ, канд. техн. наук (va.alexandrov@yandex.ru)
(Институт проблем управления им. В.А. Трапезникова РАН),
Е.Ю. ЗЫБИН, д-р техн. наук (zybin@mail.ru),
В.В. КОСЬЯНЧУК, д-р техн. наук (kos.vl.v@gmail.com),
Н.И. СЕЛЬВЕСЮК, д-р техн. наук (nis@gosniias.ru)
(ФГУП Государственный научно-исследовательский институт
авиационных систем),
А.А. ТРЕМБА, канд. физ.-мат. наук (atremba@ipu.ru),
М.В. ХЛЕБНИКОВ, д-р физ.-мат. наук (khlebnik@ipu.ru)
(Институт проблем управления им. В.А. Трапезникова РАН)
ОПТИМИЗАЦИЯ ВЫСОТНО-СКОРОСТНОГО ПРОФИЛЯ
КРЕЙСЕРСКОГО ПОЛЕТА ВОЗДУШНОГО СУДНА
ПРИ ФИКСИРОВАННОМ ВРЕМЕНИ ПРИБЫТИЯ1
Рассматривается задача минимизации расхода топлива дозвуковых
пассажирских и транспортных самолетов на этапе крейсерского полета.
Для формирования высотно-скоростного профиля полета сформулирова-
на задача оптимизации и предложено ее решение методом покоординат-
ного спуска с учетом ограничений, совмещенного с использованием набо-
ра вспомогательных точек-кандидатов. Вычисление расхода топлива как
целевой функции оптимизации реализовано через численное моделирова-
ние с фиксированным шагом переходных процессов скорости и высоты и
упрощенный расчет значений секундного расхода по статическим урав-
нениям на участках полета с постоянной скоростью и высотой.
Ключевые слова: оптимизация, воздушное судно, расход топлива, крей-
серский полет, моделирование полета, высотно-скоростной профиль.
DOI: 10.31857/S0005231021070047
1. Введение
Задача оптимизации маневрирования воздушных судов была и остается
актуальной, требуя новых подходов и решений с развитием авиации и воз-
можностей вычислительных систем [1, 2]. Проблема снижения расхода топли-
ва обусловлена не только экономическими критериями, но и необходимостью
сокращения выбросов CO2. В настоящей работе рассматривается задача фор-
мирования высотно-скоростного профиля полета воздушного судна, обеспе-
чивающего снижение расхода топлива в рамках уже совершающегося полета,
когда задано время прибытия в конечную точку. При этом предполагается,
что оптимизация профиля скорости и высоты периодически обновляется в
процессе полета с учетом фактического местоположения воздушного судна
и параметров полета. Поэтому важен вопрос разработки процедуры оптими-
зации с невысокой вычислительной сложностью для получения результата
расчетов за несколько минут с учетом ограниченных вычислительных ресур-
сов на борту воздушного судна.
1 Исследование выполнено при поддержке Российского научного фонда (проект № 21-
71-30005).
69
Сложность вычисления целевой функции оптимизации состоит в том, что
секундный расход топлива зависит в том числе от массы воздушного судна, а
масса, в свою очередь, постоянно уменьшается на величину расхода топлива.
Поэтому для получения значения целевой функции необходимо промодели-
ровать расход на всем оптимизируемом этапе полета.
В [3] рассмотрен выбор оптимальной скорости при полете на постоянной
высоте как решение задачи оптимального управления (вариационной зада-
чи). Получено аналитическое решение, при этом использована упрощенная
модель расхода топлива, а также не учитываются ветровые условия. Изме-
нение скорости для такого режима непрерывное.
Альтернативным подходом является разбиение траектории полета на ин-
тервалы и оптимизация скоростного профиля на этих интервалах (на по-
стоянной высоте). В [4] сделана попытка найти точное решение задачи об
оптимальной скорости на каждом из участков с учетом продольного ветрово-
го воздействия. Для решения необходимо использовать явный вид функции
расхода топлива, зависящей от скорости и массы, и ее особенность в виде
выпуклости. Оптимальный профиль скоростей является решением системы
уравнений и находится с помощью метода Ньютона. Существенной особен-
ностью этого подхода является то, что задача с фиксированным временем
полета заменяется задачей оптимизации по критерию “прямой цены полета”
(direct operation cost), учитывающей как расход топлива, так и задержку по
времени прибытия в конечную точку.
В [5] выполнена оптимизация профиля скорости и высоты по критерию
“прямой цены полета” для случая, когда скорости и высоты являются дис-
кретными, тем самым задача сводится к задаче смешанного целочисленно-
нелинейного программирования, которая решалась стандартными методами
среды Matlab. При этом число сегментов траектории выбиралось малым
(до трех), что позволяло осуществлять прямой перебор вариантов.
Все три подхода являются многообещающими с точки зрения дальнейшей
работы над оптимизацией полного профиля полета, но для их реализации
требуется уточнение аналитической модели полета, которая должна учиты-
вать как адекватную модель расхода топлива, так и динамику изменения
скорости и высоты полета.
Вопрос модели полета, с одной стороны, позволяющей с достаточной точ-
ностью оценить расход топлива, а с другой стороны, достаточно простой,
чтобы на ее основе можно было строить расчет целевой функции процеду-
ры оптимизации, остается актуальным [6]. В [7] рассмотрена задача миними-
зации расхода топлива дальнемагистрального самолета. Для моделирования
полета использована упрощенная система дифференциальных уравнений, где
тяга и угол атаки вычисляются по статическим уравнениям. Сделан вывод,
что маневрирование по скорости не дает заметного снижения расхода топли-
ва, а оптимизация высоты полета эффективна при дальности полета более
5000 км. При этом не рассматривается быстродействие используемых алго-
ритмов для применения в функции самолетовождения, реализуемой вычис-
лительной системой на борту воздушного судна.
Таким образом, задача формирования высотно-скоростного профиля по-
лета, обеспечивающего минимальный расход топлива на этапе крейсерского
70
полета, исследована недостаточно. Для оценки расхода топлива обычно ис-
пользуются статические уравнения или приближенные аппроксимации рас-
хода в зависимости от массы воздушного судна, скорости и высоты полета.
Такой подход не учитывает характер расхода топлива при переходных про-
цессах, возникающих при изменении скорости или высоты полета.
В настоящей работе предлагается комбинированный подход, когда пере-
ходные процессы при изменении скорости или высоты полета моделируются
системой дифференциальных уравнений, описывающей динамику полета, а
расход топлива на участках с постоянной скоростью и высотой полета вычис-
ляется по статическим уравнениям.
Для задач невыпуклой оптимизации с ограничениями (таких, как рассмат-
риваемая задача) можно применять разные подходы, например градиентный
или покоординатный спуск с проекцией на множество ограничений, метод
доверительной области, случайный поиск и т.п. Часто применяются приемы
глобальной оптимизации, использующие множественные начальные точки и
рандомизацию поиска, а также эвристики типа генетических алгоритмов, так
как невыпуклые задачи часто многоэкстремальные. Часть методов использу-
ют оценки градиента функции, которые требуют многократного вычисления
самой функции, тем самым общее время выполнения алгоритма замедляет-
ся в число раз, кратное числу варьируемых компонент. В безградиентных
методах чаще всего используется случайный поиск, что приводит к непред-
сказуемым результатам. В рассматриваемой задаче такие подходы признаны
нецелесообразными из-за недетерминированности результата и с учетом, что
вычислительная сложность это один из основных критериев выбора метода
оптимизации для реализации в бортовой вычислительной системе при огра-
ниченном времени выполнения. Поэтому предлагается использовать детер-
минированный безградиентный поисковый метод оптимизации [8] с учетом
ограничений.
Статья организована следующим образом: в разделе 2 сделана постановка
задачи и сформулирована задача оптимизации расхода топлива; в разделе 3
рассмотрена динамическая модель движения центра масс воздушного судна;
в разделе 4 приведены статические уравнения, по которым можно получить
секундный расход топлива из текущих значений высоты и скорости полета
и массы воздушного судна, считая их постоянными; в разделе 5 предложен
алгоритм расчета расхода топлива на этапе крейсерского полета; в разде-
ле 6 предлагается алгоритм оптимизации, решающий поставленную задачу;
в разделе 7 предложенные алгоритмы проверяются на примере среднемаги-
стрального пассажирского самолета; в разделе 8 приведены заключительные
выводы.
2. Постановка задачи
Рассматривается крейсерский полет без учета маневрирования по курсу.
Предполагается, что заданы
1) расстояние R, которое должно быть пройдено на этапе крейсерского
полета;
2) время ts, отведенное для прохождения этого расстояния;
3) интервал допустимых скоростей крейсерского полета [Vmin, Vmax];
71
4) разрешенные значения эшелонов высоты {h1, . . . , hK };
5) значения скорости V0 и высоты h0 в начале этапа крейсерского полета,
а также высоты hN+1, на которую необходимо выйти в конце этапа крейсер-
ского полета;
6) масса воздушного судна в начале этапа крейсерского полета m0;
7) параметры воздушного судна.
Задача состоит в том, чтобы определить требуемые скорость и высоту по-
лета в каждый момент времени, которые передаются в бортовую систему
управления, такие что суммарный расход топлива на этапе крейсерского по-
лета будет минимальным для заданных расстояния, времени, других исход-
ных данных и ограничений крейсерского полета. При определении высоты
полета необходимо учитывать, что 1) высота должна быть равна одному из
заданных допустимых значений, соответствующих эшелонам полета, 2) зада-
ется некоторое минимальное время нахождения в одном эшелоне, т.е. смена
эшелонов может производиться не чаще, чем через некоторое заданное вре-
мя. При этом требуемые скорость и высота полета будут определяться для
некоторого количества участков, на которых эти значения остаются постоян-
ными. Это означает, что требуемые скорость и высота полета не будут функ-
циями времени с разными значениями в каждый момент, а будут кусочно-
постоянными функциями. Количество участков по скорости и по высоте, на
которые разбивается весь этап крейсерского полета, должно быть задано.
Таким образом, можно сформулировать решаемую задачу.
Задача. Определить для этапа крейсерского полета требуемую скорость
на каждом участке по скорости и требуемую высоту полета на каждом участ-
ке по высоте, минимизирующие суммарный расход топлива на всем этапе
крейсерского полета при заданных времени и расстоянии полета, высотах в
начале и в конце этапа крейсерского полета, массе и скорости в начале эта-
па крейсерского полета, ограничениях на допустимые минимальную и мак-
симальную скорость и минимальное допустимое время между изменениями
требуемой высоты, допустимые дискретные значения высоты полета, соот-
ветствующие эшелонам полета.
Чтобы сформулировать эту задачу как задачу оптимизации, необходимо
выделить вектор варьируемых переменных, ограничения на эти переменные,
целевую функцию и функции ограничений. Для скоростного профиля зада-
дим число n участков равного размера r = R/n, для каждого из которых
нужно выбрать скорость Vi ∈ [Vmin, Vmax], i = 1, . . . , n, так чтобы выполня-
лось условие прибытия в заданное время ts:
∑
r
(1)
=ts.
V
i
i=1
Предлагается использовать в качестве варьируемых переменных не ско-
рости Vi, а периоды времени xi = r/Vi, так как в этом случае вместо (1)
получаем линейную функцию ограничения
[
]
∑
r
r
(2)
xi = ts, xi ∈
,
Vmax
V
min
i=1
72
Пусть для высотного профиля задано число N участков с различной вы-
сотой полета. Тогда следующая группа варьируемых переменных это вы-
сота полета на каждом из N участков xi ∈ {h1, . . . , hK }, i = n + 1, . . . , n + N,
где K число разрешенных эшелонов высоты.
Для каждого участка различной высоты необходимо определить его дли-
тельность. Высота полета не может меняться слишком часто, т.е. число N
выбирается в пределах от 1 до 5 в зависимости от расстояния, которое долж-
но быть пройдено на этапе крейсерского полета. Поэтому дополнительная
группа варьируемых переменных это время полета для каждого участка
высоты xi ≥ thmin, i = n + N + 1, . . . , n + 2N, где thmin минимальное до-
пустимое время между изменениями требуемой высоты. Тем самым участки
для каждой высоты не имеют фиксированную длину, как для скорости, а
время полета на каждом эшелоне может варьироваться. При этом должно
выполняться условие
∑
(3)
xi = ts - te,
i=n+N+1
где te
время, зарезервированное для выхода на заданную высоту в конце
крейсерского полета.
Таким образом, задача оптимизации состоит в том, чтобы найти вектор
x = [x1,... ,xn,xn+1,...,xn+N,xn+N+1,... ,xn+2N],
минимизирующий целевую функцию
∫ts
(4)
qs = qc
(t)dt,
0
где qc секундный расход топлива, при соблюдении ограничений (2) и (3).
3. Динамическая модель
Динамика движения центра масс воздушного судна определяется дейст-
вующими силами тяги двигателей, лобового сопротивления, подъемной силы
и силы тяжести [9] с учетом того, что масса не постоянна, а уменьшается за
счет расхода топлива [6] и может быть описана уравнениями
(5)
mV = T cos(α + ϕ) -1cxρSV2 - mg sin Θ + V qc,
2
(6)
mVΘ = T sin(α + ϕ) +1cyρSV2
− mg cosΘ,
2
(7)
h
= V sinΘ,
(8)
L=VcosΘ+Vw,
(9)
m= -qc,
(10)
α = θ - Θ,
73
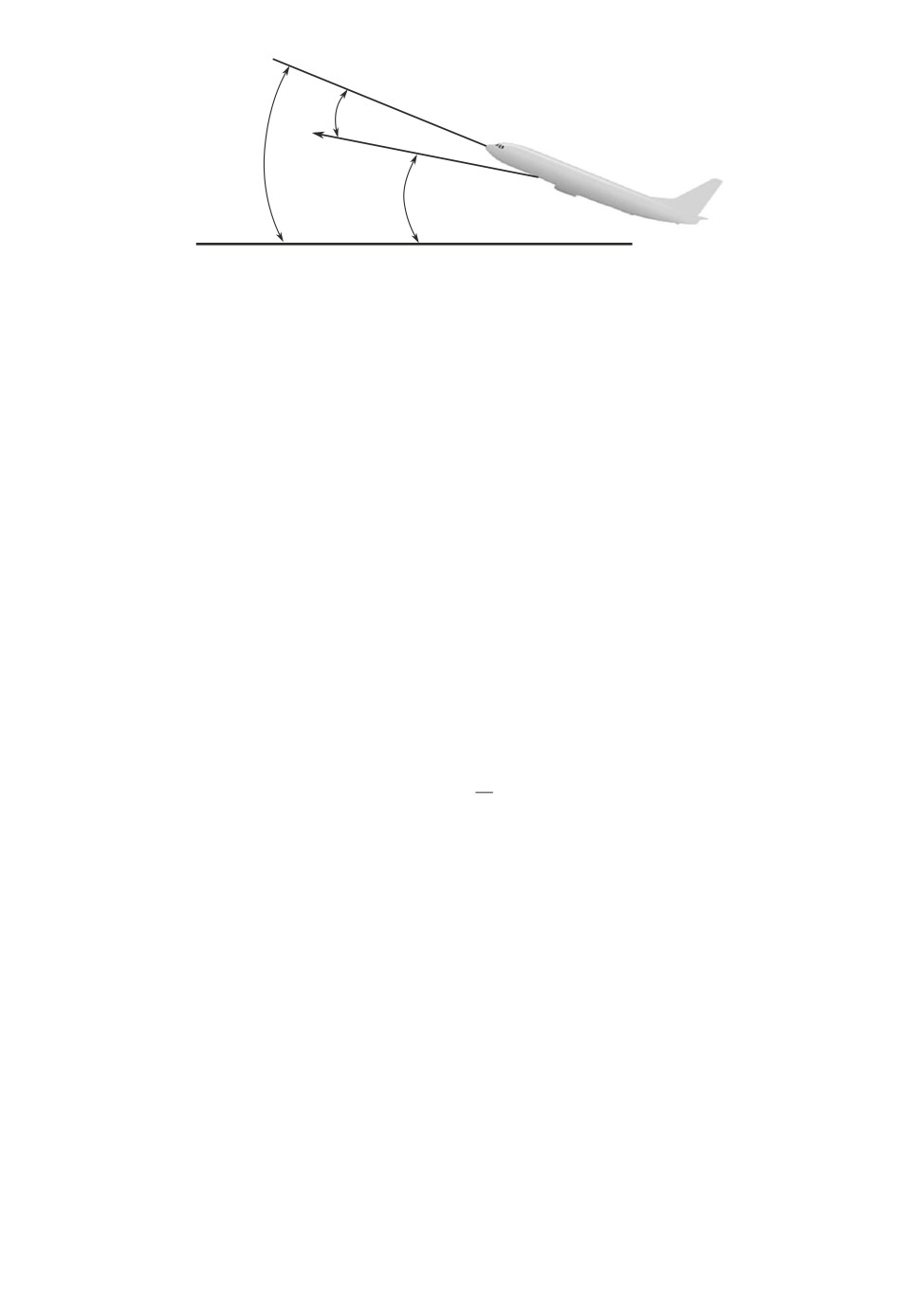
a
q
Q
Рис. 1. Взаимосвязь угла атаки и тангажа.
где переменные состояния m масса воздушного судна (кг), V
воздуш-
ная скорость (м/с), Θ угол наклона траектории (рад), h высота поле-
та (м), L пройденное расстояние (м); известные для исследуемой модели
воздушного судна константы ϕ угол установки двигателей (рад) и S
площадь крыла (м2), ускорение свободного падения будем считать констан-
той g = 9,80665 м/с2, плотность воздуха ρ (кг/м3) определяем из стандартной
атмосферы [10] в зависимости от высоты h, α угол атаки (рад) (его соотно-
шение с углами наклона траектории и тангажа показано на рис. 1), cx и cy
аэродинамические коэффициенты лобового сопротивления и подъемной си-
лы, qc
секундный расход топлива (кг/с), Vw известная или прогнози-
руемая скорость попутной/встречной составляющей ветра (м/с), значения T
суммарной тяги двигателей (Н) и тангажа θ (рад) определяются работой ре-
гуляторов скорости и высоты бортовой системы управления.
Для исследуемой модели воздушного судна должны быть известны ап-
проксимирующие формулы зависимости аэродинамических коэффициентов
от числа Маха и угла атаки cx(M, α) и cy(M, α) или заданы таблицы для
интерполяции. Число Маха находим как
V
M =
,
a
где a скорость звука, определяемая из стандартной атмосферы в зависи-
мости от высоты h. Кроме того, аэродинамические коэффициенты зависят
от значения числа Рейнольдса, но так как в работе рассматривается толь-
ко крейсерский полет, то в подразумеваемом диапазоне высот влияние этого
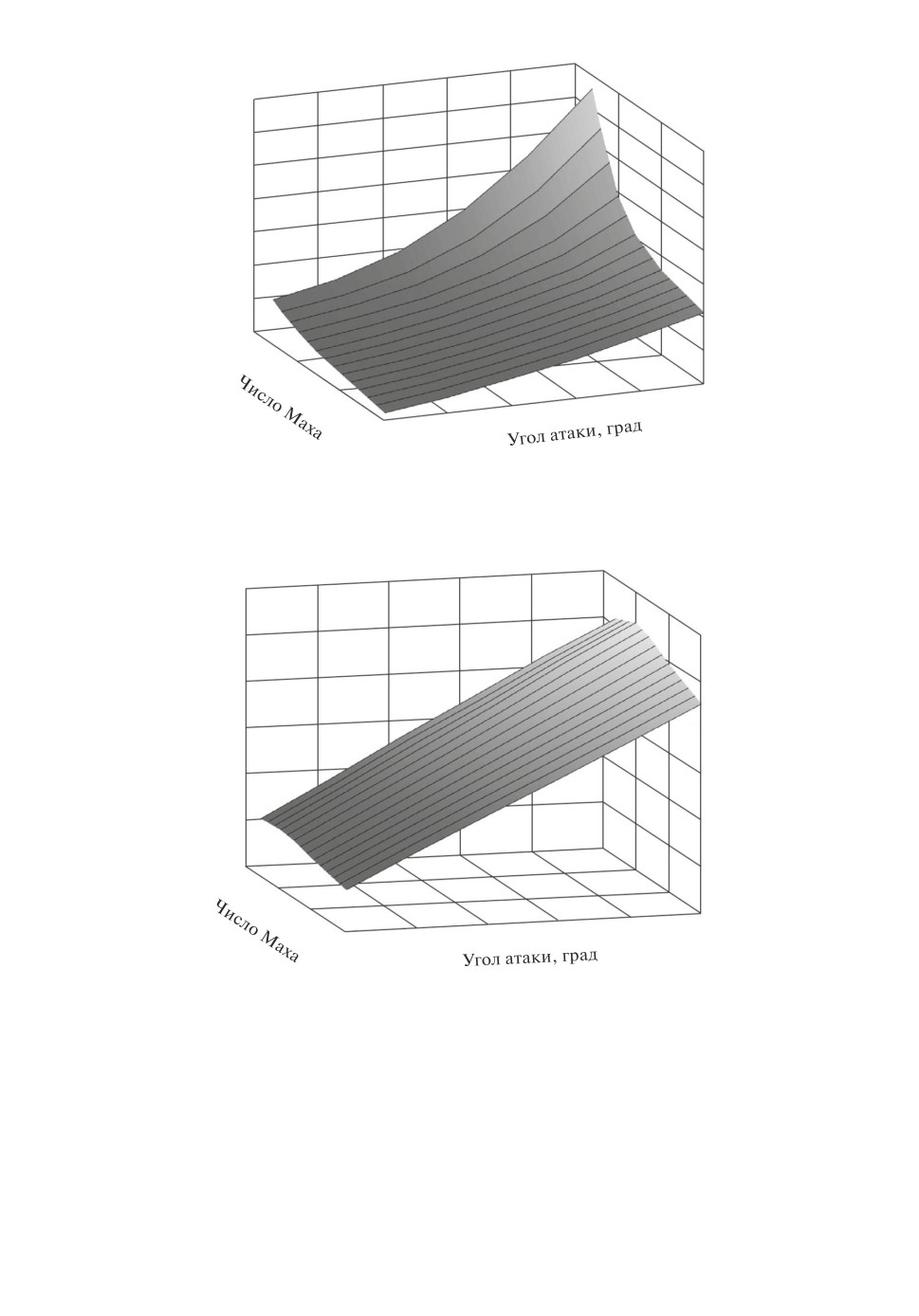
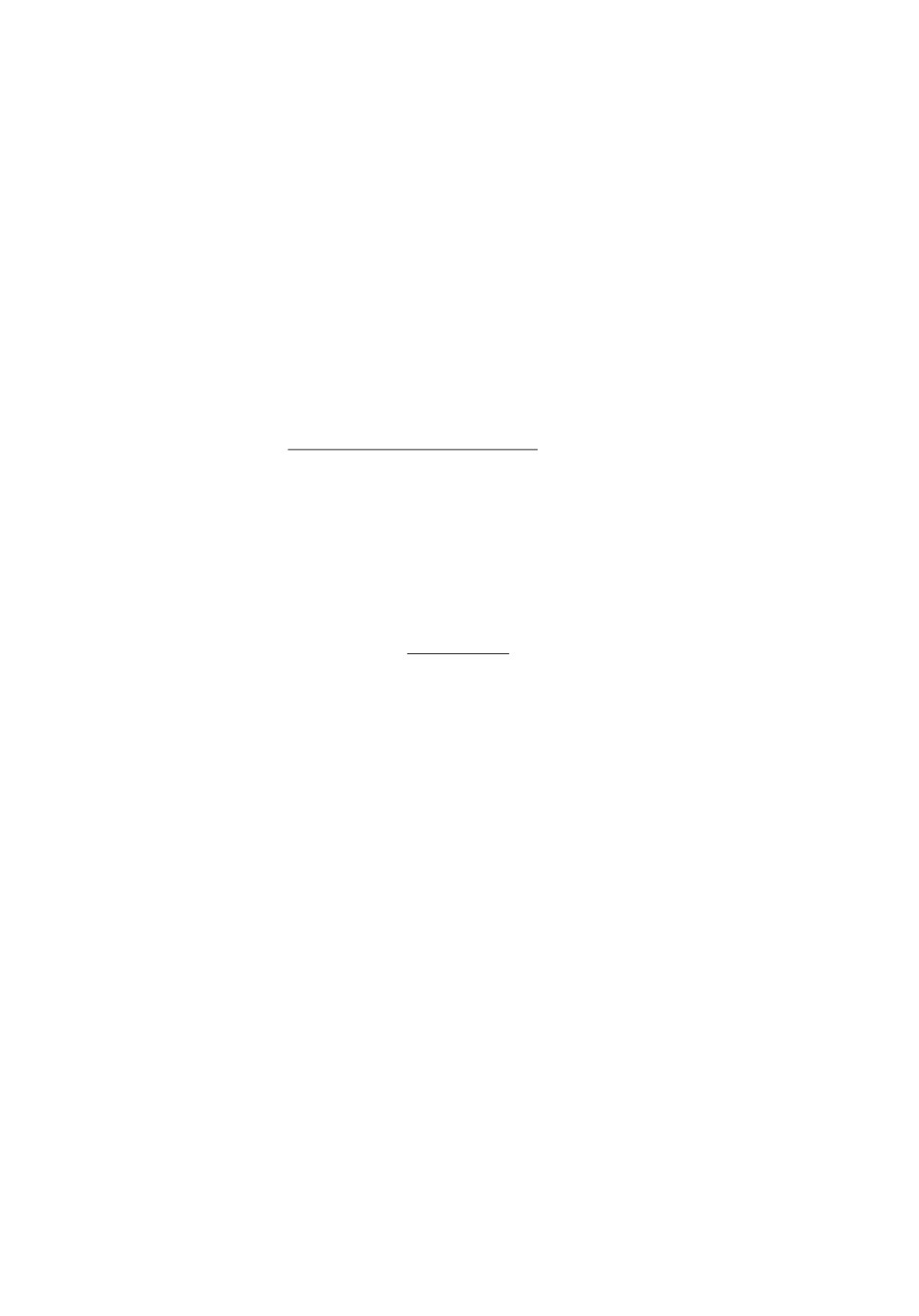
значения несущественно и им пренебрегаем. Типовые зависимости cx(M, α)
и cy(M,α) для диапазона значений M и α в режиме крейсерского полета
показаны на рис. 2 и рис. 3.
Секундный расход топлива можно выразить как
(11)
qc
= η(M,T,h)T,
где η(M, T, h) удельный расход топлива (кг/с/Н) известная для двига-
телей исследуемой модели воздушного судна функция от числа Маха, тяги,
высоты полета и, возможно, других параметров [11].
ПИД-регулятор скорости формирует сигнал управления как функцию
уставки и измеренного значения воздушной скорости. Коэффициенты регуля-
тора должны быть известны. Следует учитывать, что существует некоторая
74
Сx
0,060
0,055
0,050
0,045
0,040
0,035
0,030
0,025
0,85
0,80
3,0
0,75
2,5
2,0
1,5
1,0
0,70 0,5
Рис. 2. Зависимость аэродинамического коэффициента лобового сопротивле-
ния cx от числа Маха и угла атаки (градусы).
Сy
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,85
0,80
0,75
3,0
2,0
2,5
0,70 0,5
1,0
1,5
Рис. 3. Зависимость аэродинамического коэффициента подъемной силы cy от
числа Маха и угла атаки (градусы).
динамика тяги в зависимости от этого сигнала управления, и модель этой ди-
намики также должна быть известна. В этой работе для моделирования дина-
мики двигателей используется дифференциальное уравнение первого поряд-
ка. Аналогично работа регулятора высоты моделируется как ПИ-регулятор
с известными коэффициентами, а инерционность тангажа к сигналу управ-
ления рулем высоты моделируется дифференциальным уравнением первого
75
порядка. Кроме того, в регуляторе высоты предусмотрено ограничение угла
наклона траектории.
Таким образом, система уравнений (1)-(10), дополненная формулами рас-
чета cx(M, α), cy(M, α) и η(M, T, h), уравнениями регуляторов скорости и
высоты и уравнениями динамики тяги и тангажа, позволяет моделировать
крейсерский полет для заданных уставок скорости и высоты, определяющих
высотно-скоростной профиль полета. Начальные условия должны быть за-
данными в соответствии с параметрами полета в начале этапа крейсерского
полета.
В рассматриваемой задаче предполагается, что время ts, отведенное на
крейсерский полет, задано (и скорость выбирается так, что за это время будет
преодолено планируемое расстояние крейсерского полета). Поэтому, модели-
руя полет в течение времени ts, можно получить суммарный расход топлива
на этапе крейсерского полета как разность заданной массы воздушного судна
в начале этапа крейсерского полета и массы, полученной в конце моделиро-
вания.
4. Статическая модель
При решении задачи оптимизации целевая функция (4) вычисляется для
каждого варианта варьируемых переменных, использованного в процедуре
поиска минимального значения целевой функции. Поэтому время, необходи-
мое для вычисления значения целевой функции, должно быть достаточно
малым, и даже за счет некоторой потери точности расчета значения целевой
функции нужно искать пути сокращения вычислений.
Статическая модель позволяет получить значение секундного расхода топ-
лива для текущих значений скорости и высоты полета и массы воздушного
судна. Так как существуют участки полета, когда скорость и высоту можно
принять постоянными значениями, а при моделировании без учета возмуще-
ний весь этап крейсерского полета, кроме участков переходного процесса
между сформированными уставками скорости и высоты, то тогда
(12)
V
= 0,
Θ=0,Θ=0,
h
= 0.
Для этих условий из уравнения (5), приняв qc = η0T , где η0 прибли-
зительное среднее значение удельного расхода топлива, получаем формулу
расчета тяги
2
cxρSV
(13)
T =
(
).
2
cos(α + ϕ) + V η0
Для использования формулы (13) необходимо определить значение cx(M, α),
т.е. нужно еще найти значение угла атаки α. Для этого запишем уравнение (6)
при условиях (12):
1
(14)
T sin(α + ϕ) +
cyρSV2
− mg = 0.
2
76
Так как в режиме крейсерского полета угол α + ϕ мал, то часто первым
слагаемым в этом уравнении пренебрегают, и тогда можно получить значение
2mg
(15)
cy =
ρSV2
Приблизительное значение
α определяется из известной зависимости
cy(M,α). В настоящей работе предлагается определять значение угла ата-
ки α более точно. Для этого подставим в (14) вместо T выражение (13), где
пренебрегаем малым слагаемым V η0:
(16)
tg(α + ϕ)cxρSV2 + cyρSV2
− 2mg = 0.
Для малых значений угла α + ϕ можно принять tg(α + ϕ) ≈ α + ϕ и из (16)
получить
2mg
(17)
(α + ϕ)cx(M, α) + cy(M, α) -
= 0.
ρSV2
Здесь важно помнить, что использование приблизительных статических
уравнений предполагается для сокращения времени вычислений. Поэтому
для того, чтобы получение значения α как решение уравнения (17) не стало
вычислительно сложной задачей, необходимо получить линейные аппрокси-
мации
(18)
cx(M,α) = kx1(M,α)α + kx0
(M, α),
(19)
cy(M,α) = ky1(M)α + ky0
(M).
На рис. 3 видно, что зависимость cy(M, α) практически линейна относи-
тельно α, и будем считать, что коэффициенты в линейной аппроксимации (19)
зависят только от числа Маха M, которое при рассмотрении статических
уравнений является известным значением для заданных воздушной скорости
и высоты полета. На рис. 2 видно, что зависимость cx(M, α) нелинейна отно-
сительно α, поэтому коэффициенты в линейной аппроксимации (18) зависят и
от угла атаки α. Будем использовать оценку α, полученную из уравнений (15)
и (19) для вычисления значений коэффициентов kx1(M, α) и kx0(M, α).
Таким образом, подставив (18) и (19) в (17), получим квадратное уравне-
ние с неизвестным α, из которого легко находится его значение. Выбирается
большее из двух решений квадратного уравнения с учетом, что значение уг-
ла атаки в рассматриваемых режимах должно быть положительным. Теперь
можно посчитать тягу по формуле (13) и найти текущее значение расхода
топлива (11).
Следует заметить, что в (17) использовано текущее значение массы m, ко-
торое постоянно уменьшается в соответствии с расходом топлива. Поэтому
для получения расхода топлива на участке с постоянными скоростью и высо-
той полета нужно выбрать некоторый шаг времени, на котором изменением
массы можно пренебречь, и с этим шагом повторять расчет секундного рас-
хода топлива по формулам (11) и (13), обновляя значение массы на каждом
77
шаге с учетом расхода топлива и интегрируя расход. В рассматриваемом в
разделе 7 примере расход топлива на участках без переходных процессов со-
ставляет не более 0,72 кг/с, и при выборе шага в 60 с изменение общей массы
за один шаг будет менее 0,07 %, а изменение расхода топлива менее 0,04 %, что
можно считать верхней оценкой возможной ошибки расчета расхода. Ошибка
по сравнению с моделированием этого примера методом Рунге-Кутты четвер-
того порядка практически оказалась в несколько раз меньше.
5. Алгоритм расчета расхода топлива
Предлагается вычислять значение суммарного расхода топлива на этапе
крейсерского полета (4), используя для участков с постоянными скоростью и
высотой полета формулы (11) и (13), где значение массы будет уменьшаться
на величину расхода топлива с шагом вычислений таким, на котором массу
можно считать постоянной с достаточной степенью точности. То есть вы-
брав шаг моделирования Δst, принимаем длительность участка с постоянны-
ми скоростью и высотой полета равным
tk = lΔst + Δ,
где l
натуральное число, Δ < Δst, и вычисляем расход топлива на этом
участке как сумму
∑
qk =
qci Δst + qcl+1 Δ,
i=1
где qci полученные значения секундного расхода топлива на каждом шаге.
Для переходных процессов при изменении скорости или высоты полета
предлагается находить расход топлива, моделируя полет по уравнениям (5)-
(11), формулам расчета cx(M, α), cy(M, α) и η(M, T, h) и формулам регулято-
ров скорости и высоты, учитывая инерционность тяги и тангажа и используя
простейший численный метод Эйлера первого порядка с шагом одна секунда.
Использование этого метода для рассматриваемого в разделе 7 примера дает
ошибку значения расхода топлива по сравнению с моделированием методом
Рунге-Кутты четвертого порядка всего 0,004 % при повышении быстродей-
ствия в 3 раза.
Следует учитывать, что если принимать уставку скорости на каждом из
n участков равной
r
(20)
Vi =
,
i = 1,...,n,
xi
то в результате моделирования пройденное расстояние может отличаться от
заданного, так как в начале каждого участка во время переходного процесса
от скорости Vi-1 к скорости Vi реальная скорость еще не равна значению Vi.
Поэтому для соблюдения условия, что необходимо преодолеть заданное рас-
стояние за заданное время, уставка скорости на участке рассчитывается как
r-tvVi-1
(21)
Vi =
,
i = 1,...,n,
xi - tv
78
где tv примерное усредненное значение, подбираемое экспериментально, со-
ответствующее половине времени основной части переходного процесса, где
скорость принимается как среднеарифметическое от скоростей предыдуще-
го и текущего участков. Это позволяет скомпенсировать ошибку в итоговом
пройденном расстоянии. В рассматриваемом в разделе 7 примере tv = 11 с.
При больших участках постоянной скорости, например, для r = 500 000 м и
xi = 2200 с разница значений, полученных по формуле (20) или (21), соста-
вит примерно 0,02 % при изменении скорости на 10 м/с и еще меньше при
меньшем изменении. Такой разницей можно пренебречь. Но если значения r
и xi будут в 10 раз меньше, то ошибка вырастет в 10 раз и будет уже не-
приемлемой.
Кроме того, во время переходного процесса по высоте горизонтальная ско-
рость должна учитывать угол наклона траектории. Поэтому уставка скорости
на участке рассчитывается следующим образом:
r-tvVi-1
(22)
Vi =
,
i = 1,...,n,
xi - tv - thi(1 - cos Θmax)
где Θmax максимально разрешенный угол наклона траектории в режиме
крейсерского полета, thi общее время переходных процессов по высоте на
i-м участке по скорости (если их нет на этом участке, то thi = 0, и тогда (22)
совпадает с (21)), которое находится как сумма длительностей переходных
процессов по высоте, каждую из которых определяем как
|xj - xj-1|
,
Vi sin Θmax
где xj
значение высоты. Такой расчет требуемой скорости носит оценоч-
ный характер, что может приводить к тому, что за заданное время при най-
денных значениях скоростей пройденное расстояние будет отличаться от за-
данного. Так, в примере раздела 7 при моделировании профиля полета дли-
тельностью 6 ч, показанного на рис. 7, расстояние полета получилось рав-
ным 5 000 031 м при заданном значении 5 000 000 м, т.е. ошибка составила
менее 0,001 %. Практически требуемая точность моделирования расхода топ-
лива составляет 0,05 %. При этом нужно учитывать, что задача найти оп-
тимальный высотно-скоростной профиль полета, а не значение расхода, т.е.
важно, чтобы разные исходные данные моделирования не приводили к суще-
ственно разным ошибкам и таким образом влияли на полученный результат,
а расхождение моделируемого и реального расхода топлива может быть более
существенным.
6. Алгоритм оптимизации
Целевая функция расхода топлива моделируется нелинейными дифферен-
циальными и алгебраическими уравнениями, поэтому ее градиент аналити-
чески недоступен, а его численная оценка по непрерывным переменным тре-
бует n + N дополнительных вычислений функций, что неприемлемо с точки
зрения замедления алгоритма. Более того, функция невыпуклая и много-
экстремальная, что затрудняет применение ряда алгоритмов (ускоренных и
79
проксимальных), а также исключает гарантии нахождения глобального ми-
нимума методами оптимизации, не использующими переборный подход. По-
этому применяются эвристические и частично переборные алгоритмы, схо-
дящиеся к локальному минимуму. Постановка задачи усложняется введени-
ем дискретных переменных (эшелоны высоты). Их полный перебор требует
KN вычислений целевой функции и представляется нереализуемым даже для
небольшого числа переменных N (число участков полета на постоянной вы-
соте) и доступных эшелонов K.
Обе сложности удалось преодолеть с помощью гибридного метода опти-
мизации, требующего небольшое количество вычислений целевой функции и
одновременно учитывающего “разумный” перебор дискретных величин. Реа-
лизованный метод схож с методом покоординатного спуска [8, 12]. Метод от-
личается тем, что для соблюдения ограничений на каждом шаге может изме-
няться не одна, а несколько компонент вектора переменных. Кроме того, ис-
пользуется набор вспомогательных точек-кандидатов, что позволяет успешно
решать проблему попадания в локальный минимум, в отличие от метода ло-
кальных вариаций [12]. Выбор точек-кандидатов детерминирован в отличие
от метода роя частиц [13]. Алгоритм выполняется с фиксированным парамет-
ром шага, поэтому нужно учитывать, что это минимум на множестве варьи-
руемых переменных, зависящем от выбранного параметра шага. При выпол-
нении алгоритма генерируется последовательность точек {x(i), i = 1, 2, . . .},
образующих релаксирующую, убывающую последовательность
qs(x(i+1)) ≤ qs(x(i)).
Вектор переменных x = [x1, x2, x3] состоит из трех групп: x1 время на
каждый из n участков различной скорости, x2 высота из множества раз-
решенных эшелонов для каждого из N участков различной высоты, x3
время на каждый из N участков различной высоты. При изменении компо-
ненты в первой или третьей группах необходимо соблюдать ограничения (2)
или (3) соответственно. Например, при увеличении выбранной компоненты
“соседние” с ней или все остальные компоненты группы уменьшаются так,
чтобы выполнялись ограничения (2) и (3). По существу подзадача выбо-
ра точек-кандидатов состоит в подборе нескольких “соседних” по отноше-
нию к текущей точек, удовлетворяющих ограничениям. Изменение основной
выбранной компоненты характеризуется внутренним параметром алгоритма,
играющим роль длины шага. В группе варьируемых переменных x2 (высо-
та полета на каждом из N участков xi ∈ {h1, . . . , hK }, i = n + 1, . . . , n + N) в
качестве точек-кандидатов берутся все возможные варианты, т.е. все K эше-
лонов.
Алгоритм оптимизации.
Шаг 1. Выбрать начальную точку
x(0) = [x1,(0), x2,(0), x3,(0)],
удовлетворяющую всем ограничениям. Инициировать общий счетчик итера-
ций k = 0, внутренние счетчики для каждой группы переменных k1 = k2 =
= k3 = 1 и счетчик неэффективных шагов kbad = 0.
80
Шаг 2. Выбрать группу переменных j = mod(k, 3) + 1.
Шаг 3. В группе переменных xj выбрать основную изменяемую компонен-
ту и увеличить ее счетчик.
Шаг 4. Сформировать набор точек-кандидатов X = {xa, xb, . . .} на основе
выбранной группы и изменяемой компоненты. Число кандидатов зависит от
группы.
Шаг 5. Вычислить целевую функцию во всех точках-кандидатах и выбрать
среди них минимальное значение и соответствующую точку
xcand = arg minqs(x).
x∈X
Шаг 6. Если значение функции удалось улучшить, т.е.
qs(xcand) < qs(x(k)),
то изменить текущую точку x(k+1) ← xcand и сбросить счетчик неэффектив-
ных шагов kbad ← 0. В противном случае сохранить точку x(k+1) ← x(k) и
увеличить счетчик неэффективных шагов kbad ← kbad + 1.
Шаг 7. Если счетчик неэффективных шагов меньше числа переменных
kbad < n + 2N, то перейти к Шагу 2. Иначе
Завершить алгоритм: Вернуть в качестве решения текущую точку x(k).
7. Пример
Предложенные алгоритмы оптимизации и расчета целевой функции реа-
лизованы в среде Matlab. Проверка их работоспособности проведена на сле-
дующем примере. Рассмотрим среднемагистральный пассажирский самолет
МС-21-300 с площадью крыла S = 113 м2 и следующими исходными данными
крейсерского полета, представленными в табл. 1.
Проверим сначала эффективность варьирования скорости на постоянной
высоте. Пусть для скорости задано n = 10 участков (тогда r = R/n = 500 км),
а высоту считаем постоянной: N = 1, K = 1, h0 = h1 = hN+1 = 9144 м. Про-
цедурой оптимизации найдены значения скоростей:
V = [235,33,
235,45,
235,58,
235,7,
234,96, . . .
227,37,
227,37,
227,48,
227,59,
228,64] м/с.
Таблица 1. Исходные данные
Расстояние крейсерского полета
R
5 000000 м (5000 км)
Время крейсерского полета
ts
21600 c (6 ч)
Минимальная скорость
Vmin
210 м/с
Максимальная скорость
Vmax
250 м/с
Начальная скорость
V0
R/ts = 231,48 м/с
Начальная высота
h0
9144 м (30 000 футов)
Конечная высота
hN+1
9144 м (30 000 футов)
Разрешенный угол наклона траектории Θmax
1 градус
Масса в начале крейсерского полета
m0
75000 кг
81
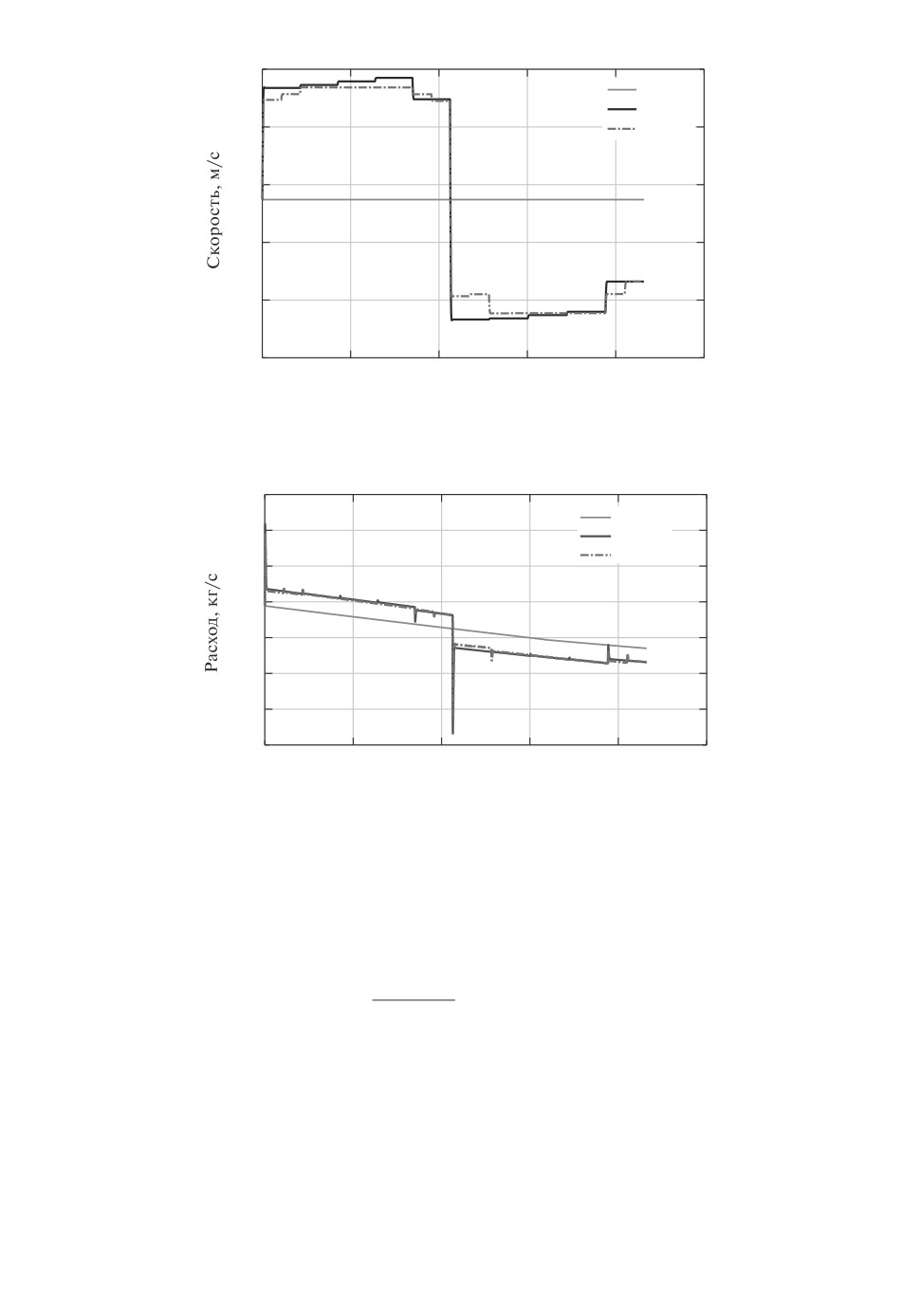
236
n = 1
n = 10
234
n = 20
232
230
228
226
0
0,5
1,0
1,5
2,0
2,5
Время, с
´104
Рис. 4. Скорость при моделировании найденного профиля.
0,85
n = 1
0,80
n = 10
n = 20
0,75
0,70
0,65
0,60
0,55
0,50
0
0,5
1,0
1,5
2,0
2,5
Время, с
´104
Рис. 5. Расход топлива при моделировании найденного профиля скорости.
Расход топлива составил 14 293 кг. Если менять скорость чаще и принять
n = 20, то получим такой же расход топлива с точностью до 0,2 кг. То есть
повышение вариативности скорости не дает дополнительной экономии. При
моделировании полета с постоянной скоростью
5 000000
V =
= 231,481 м/с
21600
расход топлива составил 14 314 кг. Маневрирование по скорости дало эко-
номию всего 21 кг. Графики моделирования скорости и секундного расхода
топлива для этих трех вариантов показаны на рис. 4 и 5.
При оптимизации высоты и скорости для n = 10, N = 4, K = 6, h0 =
= hN+1 = 9144 м и разрешенных значениях эшелонов высоты
{h1, . . . , hK } = {9144,
9753,6,
10363,2,
10972,8,
11582,4,
12192} м =
= {30 000,
32000,
34000,
36000,
38000,
40000} футов
82
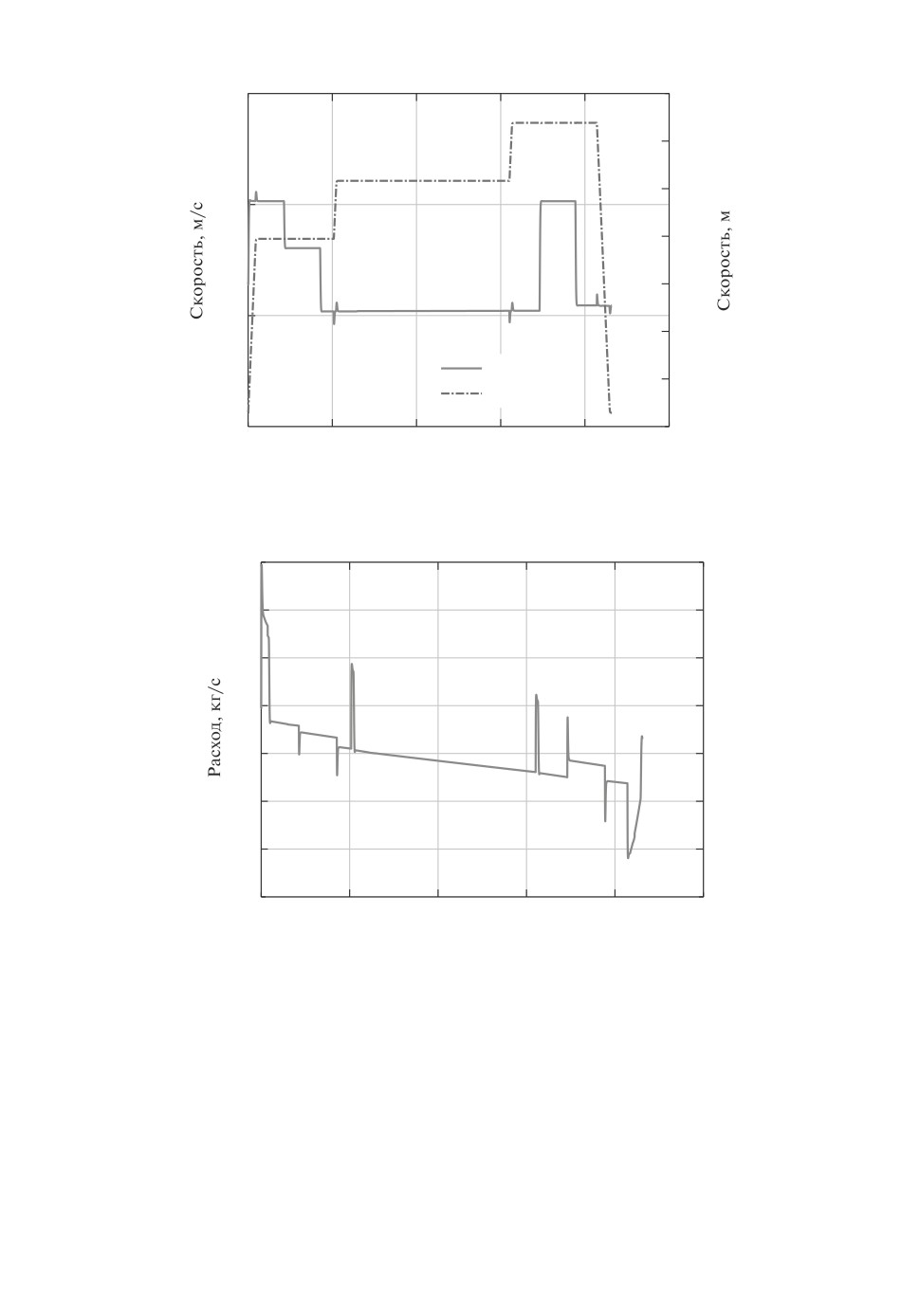
4
´10
240
1.25
1,20
1,15
235
1,10
1.05
230
1,00
Cкорость
0,95
Высота
225
0,90
0
0,5
1,0
1,5
2,0
2,5
Время, с
´104
Рис. 6. Скорость и высота при моделировании найденного профиля.
1,0
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0
0,5
1,0
1,5
2,0
2,5
Время, с
´104
Рис. 7. Расход топлива при моделировании найденного профиля.
получен расход топлива 12 838 кг при значениях скоростей на каждом из
десяти участков:
V = [235,15,
233,04,
230,18,
230,20,
230,2, . . .
230,21,
230,21,
230,21,
235,15,
230,46] м/с.
значениях высоты на каждом из четырех участков:
h = [10972,8,
11582,4,
11582,4,
12192] м,
83
Таблица 2. Зависимость расхода топлива от высоты полета
Высота, м
9144
11582,4
12192
Расход, кг
14314
12893
13016
значениях длительности каждого из четырех участков высоты:
x3 = [5082,4, 5224,2,
5204,1,
5189,3] с.
Графики моделирования скорости и высоты показаны на рис. 6, график
секундного расхода топлива на рис. 7. При моделировании полета с по-
стоянной скоростью V = 231,481 м/с и на постоянной высоте 11582,4 м рас-
ход топлива составил 12 893 кг. Маневрирование дало более заметную эконо-
мию 55 кг. Заметим, что даже если не менять высоту на этапе крейсерского
полета (N = 1), важен выбор высоты полета в зависимости от массы. Для
рассматриваемого примера при m0 = 75 000 кг при полете с постоянной ско-
ростью V = 231,481 м/с и на постоянной высоте расход на разных высотах
приведен в табл. 2.
Заметим, что в полученных значениях расхода топлива учтены набор вы-
соты от начальной высоты крейсерского полета и снижение к высоте, требуе-
мой в конце этапа крейсерского полета.
8. Заключение
Полученные результаты моделирования подтверждают результаты дру-
гих исследований, что при решении задачи минимизации расхода топлива
при условии заданных расстоянии и времени крейсерского полета маневри-
рование по скорости и высоте не дает существенной экономии топлива. Так, в
рассмотренном примере маневрирование только по скорости дало снижение
расхода на 0,15 %, а при маневрировании по скорости и высоте на 0,4 %.
Тем не менее важен расчет экономичной высоты полета при заданной массе
воздушного судна, так как правильный выбор эшелона дает существенную
экономию топлива. Кроме того, разработанные алгоритмы позволяют учи-
тывать прогнозные значения скорости ветра. При этом оптимальное форми-
рование высотно-скоростного профиля полета может давать более заметное
снижение расхода. Таким образом, дальнейшее развитие работы предпола-
гает исследование оптимизации расхода топлива с использованием данных о
скорости ветра.
Авторы выражают признательность Борису Теодоровичу Поляку и Нико-
лаю Владимировичу Куланову за ценные советы при подготовке работы.
СПИСОК ЛИТЕРАТУРЫ
1. Русол В.А. Оптимизация маневрирования воздушных судов. М.: Транспорт,
1986.
2. Скрипниченко С.Ю. Оптимизация режимов полета по экономическим критери-
ям. 2-е изд., перераб. и доп. М.: Машиностроение, 1988.
84
3. Franco A., Rivas D., Valenzuela A. Minimum-Fuel Cruise at Constant Altitude With
Fixed Arrival Time // J. Guidance, Control, Dynam. 2010. V. 33. No. 1. P. 280-285.
4. Saucier A., Maazoun W., Soumis F. Optimal Speed-Profile Determination for Air-
craft Trajectories // Aerosp. Sci. Technol. 2017. V. 67. P. 327-342.
5. Valenzuela A., Rivas D. Optimization of Aircraft Cruise Procedures Using Discrete
Trajectory Patterns // J. Aircraft. 2014. V. 51. Iss. 5. P. 1632-1640.
6. Григоров П.Ю., Куланов Н.В. Применение концепции обратных задач динамики
в задачах вертикальной навигации // Известия РАН. Теория и системы управ-
ления. 2016. № 3. С. 130-140.
7. Губарева Е.А., Мозжорина Т.Ю. Оптимизация программы полета дозвукового
пассажирского самолета на участке крейсерского полета // Инженерный жур-
нал: наука и инновации. 2014. Вып. 12(36).
8. Поляк Б.Т. Введение в оптимизацию. 2-е изд., испр. и доп. М.: ЛЕНАНД, 2014.
9. Hull D.G. Fundamentals of Airplane Flight Mechanics. Berlin: Springer-Verlag, 2007.
10. ГОСТ 4401-81. Атмосфера стандартная. Параметры. М.: Изд-во стандартов,
2004.
11. Bartel M., Trevor M.Y. Simplified Thrust and Fuel Consumption Models for Modern
Two-Shaft Turbofan Engines // J. Aircraft. 2008. V. 45. Iss. 4. P. 1450-1456.
12. Васильев Ф.П. Методы оптимизации. М.: Факториал Пресс, 2002.
13. Kennedy J., Eberhart R. Particle Swarm Optimization // Proc. 1995 IEEE Int. Conf.
Neural Networks. 1995. Vol. 4. P. 1942-1948.
Статья представлена к публикации членом редколлегии А.А. Галяевым.
Поступила в редакцию 23.11.2020
После доработки 05.02.2021
Принята к публикации 16.03.2021
85