Автоматика и телемеханика, № 7, 2021
Робастное, адаптивное и сетевое
управление
© 2021 г. К.Р. АЙДА-ЗАДЕ, д-р физ.-мат. наук, член-корр. НАН Азербайджана
(kamil_aydazade@rambler.ru)
(Институт систем управления НАН Азербайджана;
Институт математики и механики НАН Азербайджана, Баку),
Е.Р. АШРАФОВА, канд. физ.-мат. наук (ashrafova.yegana@gmail.com)
(Бакинский государственный университет;
Институт систем управления НАН Азербайджана, Баку)
ОПТИМИЗАЦИЯ МЕСТ И ПАРАМЕТРОВ ИСТОЧНИКОВ
ДЛЯ ОБЪЕКТОВ СЕТЕВОЙ СТРУКТУРЫ
Исследуется задача оптимизации мест размещения и значений пара-
метров сосредоточенных источников, влияющих на функционирование
сложного объекта. Объект состоит из большого числа одномерных объек-
тов, состояние каждого из которых описывается системой обыкновенных
дифференциальных уравнений с неразделенными краевыми условиями.
Получены необходимые условия оптимальности как по параметрам, так
и местам сосредоточения источников. На примере модельной задачи при-
ведены результаты численных экспериментов.
Ключевые слова: источники, размещение источников, нелокальные усло-
вия, условия оптимальности, градиент функционала.
DOI: 10.31857/S0005231021070060
1. Введение
В статье исследуется задача оптимизации мест размещения и значений
параметров сосредоточенных источников [1-4], влияющих на функциониро-
вание сложного объекта. Объект состоит из большого числа одномерных
объектов, состояние каждого из которых описывается системой обыкновен-
ных дифференциальных уравнений. Подобъекты связаны между собой в про-
извольном порядке лишь состояниями в своих начальных или конечных точ-
ках. В точках соединения смежных подобъектов выполняются условия, яв-
ляющиеся аналогами физических законов, например законами сохранения
энергии, материального баланса и т.п.
Такие сложные объекты будем называть динамическими объектами сете-
вой структуры, по аналогии с публикацией [5], а соответствующие матема-
тические модели сетевыми. Они возникают при использовании методов
декомпозиции [6-8] при математическом моделировании сложных объектов,
состоящих из подобъектов, имеющих самостоятельное назначение. Предпола-
гается, что математические модели каждого из подобъектов известны или их
107
получение несложно. Декомпозиция объекта может проводиться по простран-
ственным переменным, если объект имеет пространственную протяженность,
или по временной переменной, или же по обеим переменным одновременно.
На отдельные точки подобъектов и на точки их соединения воздейству-
ют источники, влияющие на функционирование как отдельных подобъектов,
так и всего объекта в целом. Точки воздействия источников на подобъек-
ты и их параметры требуется оптимизировать, исходя из заданного целевого
функционала задачи.
Таким образом, исследуемая задача оптимизации описывается большой
системой дифференциальных уравнений с обыкновенными производными.
Система уравнений имеет блочную структуру, сами блоки связаны между
собой в произвольном порядке лишь неразделенными начальными или ко-
нечными значениями фазовых переменных. Это означает, что система диф-
ференциальных уравнений не структурирована каким-либо специальным об-
разом, а краевые условия являются нелокальными.
Структуру таких объектов удобно представлять в виде ориентированного
графа [9]. Предполагается, что граф неполный, т.е. большая часть элементов
матрицы связей равны нулю. Ненулевые элементы этой матрицы соответству-
ют наличию связи между начальными и конечными состояниями отдельных
блоков, соответствующих смежным дугам графа.
В статье исследованы выпуклость функционала, его дифференцируе-
мость, получены необходимые условия оптимальности как по параметрам,
так и местам сосредоточения источников. Предложена двухуровневая схема
численного решения задачи. На верхнем уровне используются методы оп-
тимизации [10, 11] первого порядка с применением полученных формул для
градиента целевого функционала по оптимизируемым местам воздействия и
параметрам источников. На нижнем уровне решаются прямая и сопряжен-
ная системы дифференциальных уравнений большой размерности блочной
структуры с краевыми условиями, включающими неразделенные начальные
и конечные значения фазовых переменных смежных блоков и значения па-
раметров внешних источников. Для решения этих краевых задач применяет-
ся предложенный в [12-14] подход, основанный на аналоге метода прогонки
[15-18]. Данный подход и расчетные формулы дают возможность проводить
процедуру прогонки для каждого условия каждого блока отдельно, незави-
симо от других условий и блоков. Это позволяет распараллеливать [19, 20]
этап решения прямой и сопряженной краевых задач, к которому приходится
многократно обращаться в процессе решения основной задачи оптимизации.
К рассматриваемой задаче, в частности, приводится задача оптимального
управления переходным процессом неустановившегося движения жидкости
(газа) в трубопроводных сетях сложной структуры [21, 22]. Математические
модели этих процессов состоят из подсистем дифференциальных уравнений с
частными производными гиперболического типа, каждая из которых описы-
вает процесс движения на отдельном участке трубопровода. В местах соеди-
нения участков выполняются условия непрерывности потока и материально-
го баланса, которые приводят к неразделенным краевым условиям. Примене-
ние метода прямых по временной или пространственной переменных (аналог
108
применения метода декомпозиции) приводит задачу управления режимами
движения сырья в транспортной сети к задаче, исследуемой в данной статье.
2. Постановка задачи
Рассматривается сложный объект, состоящий из m звеньев (блоков), в про-
извольном порядке соединенных своими концами, структуру которого удобно
представить в виде ориентированного графа. Каждой дуге графа сопостав-
ляется независимый подобъект (блок), состояние которого описывается си-
стемой обыкновенных дифференциальных уравнений.
Множество всех вершин графа обозначим через I, а множество дуг (зве-
ньев) (k, s) длиной lks с началом в вершине k ∈ I и концом в вершине s ∈ I
обозначим через J = {(k, s) : k, s ∈ I}, |I| = N, |J| = m, |I| указывает на чис-
ло элементов множества I.
{
}
{
}
Пусть J+i =
(j, i) : j ∈ I+i
, J-i =
(i, j) : j ∈ I-i
- множества дуг соот-
ветственно входящих и выходящих из i-й вершины, I+i и I-i - множе-
ства вершин, смежных с i-й вершиной, являющихся соответственно конца-
ми и началами дуг из множества Ji, Ji = J+i
⋃J-i, Ii = I+i⋃I-i . Обозначим
J+i
=
I+i
=ni,
J-i
=
I-i
=n
, ni +ni =ni,i∈I.
i
Ясно, что
∑
∑
∑
ni = n, n + n = 2m,
ni = 2m.
ni=n,
i∈I
i∈I
i∈I
В практических приложениях, как правило, имеет место соотношение
ni ≪ N, i ∈ I, т.е. число вершин, смежных с какой-либо вершиной, много
меньше общего числа вершин.
Пусть состояние каждого из звеньев (k, i) ∈ J, k ∈ I+i, i ∈ I, описывается
системой ℵ-мерных линейных неавтономных обыкновенных дифференциаль-
ных уравнений
duki(x)
= Aki(x)uki(x) + Bkiwkiδ(x - ξki) + fki(x),
(2.1)
dx
x ∈ (0,lki), k ∈ I+i , i ∈ I,
с Mi, Mi ≤ ni · ℵ, линейно независимыми краевыми условиями, заданными в
неразделенном виде
ni
∑
∑
iks
(2.2)
gj
uiks(0) +
qksijuksi(lksi) = vij, j = 1,Mi
,
i∈I.
s=1,ks∈I-
i
s=1,ks∈I+
i
Здесь функция uki(x) [ uki]x; υ) ∈ Rℵ характеризует состояние (k, i)-го звена
длиной lki в точке x ∈
0, lki
; υ = (w,v,ξ) - вектор оптимизируемых парамет-
ров, у которого параметры w ∈ Rµ, w = (wki = (wki1, . . . , wkiµ
)∈Ωwki ⊂Rµki :
ki
k ∈ I+i ,i ∈ I), wkij
j-я компонента µki-мерного (k, i)-го внешнего источ-
[
]
ника, воздействующего на (k, i)-ю подсистему в точке ξki ∈ Ωξki ≡
0, lki
,
109
(
)
ξ = (ξki : k ∈ I+i ,i ∈ I), ξ ∈ Rm , m ≤ m; v ∈ RM, v =
vi ∈ Ωvi ⊂ RMi,i ∈ I
,
(
vi =
vi1,... ,viMi
)T, vij
j-я компонента внешнего источника, воздейст-
∑
∑
∑N
вующего на i-ю вершину. Обозначим µ =i∈Ik∈I+
µki, M =
Mi.
i=1
k
В задаче заданными являются: Aki(x) = const, fki(x)
соответственно
ℵ-мерные квадратные матричные и векторные непрерывные при x ∈ [0, lki]
функции; Bki
(ℵ × µki)-мерные скалярные матрицы; строчные векто-
(
)
(
)
,...,giks
, ks ∈ I-i, s = 1,ni, qksij = qksij1 ,...,qksi
, ks ∈I+i,
1
j,ℵ
jℵ
s = 1,ni, j = 1,Mi, i ∈ I.
Если Bki = 0ℵ×µki , то это означает, что на (k, i)-м участке источников нет.
В уравнениях системы (2.1) участвует δ(·)-функция Дирака такая, что для
произвольной непрерывной функции ϕ(x) и точки ξki: x, ξki ∈ [0, lki] имеет
место равенство [23, с. 270]
∫
(2.3)
ϕ(x)δ(x - ξki)dx = ϕ(ξki
).
0
Под решением системы (2.1) понимается вектор-функция uki(x), которая
непрерывно дифференцируема при x ∈ (0; ξki)
⋃(ξki, lki), а при x = ξki имеет
место равенство
uki(ξki + 0) - uki(ξki - 0) = Bkiwki, (k,i) ∈ J.
В уравнениях системы (2.1) относительно каждого (k,i)-го звена, содержа-
щего источник, можно исключить второе слагаемое с δ(·)-функцией, разбив
ее на две системы:
duki1(x)
= Aki1 (x)uki1 (x) + fki1 (x), x ∈ (0,lki1 ),
dx
duki2(x)
= Aki2 (x)uki2 (x) + fki2 (x), x ∈ (0,lki2 )
dx
с краевыми неразделенными условиями типа скачка:
uki1(lki1) = uki2(0) + Bkiwki.
Здесь использованы обозначения:
Aki1(x) = Aki(x),
fki1(x) = fki(x),
lki1 = ξki,
Aki2(x) = Aki(x + ξki), fki2(x) = fki(x + ξki), lki2 = lki - ξki.
Общее число подсистем (2.1) равно числу звеньев m, текущие состояния
которых связаны со смежными звеньями (блоками) в произвольном поряд-
ке лишь посредством неразделенных (нелокальных) краевых условий (2.2).
Отметим, что общее число дифференциальных уравнений в системе (2.1) рав-
но mℵ и число краевых условий в (2.2), равное M, должны быть равны между
собой: M = mℵ.
110
Будем предполагать, что краевая задача (2.1), (2.2) имеет единственное
решение. Это, как известно из [24], зависит лишь от матриц Aki(x), k ∈ I+i,
, s = 1,ni, qksij, ks ∈ I+i , s = 1,ni, j = 1,Mi, i ∈ I, и не за-
векторов giksj,ks∈
i
висит от других данных, участвующих в задаче, в частности от неизвестных
векторов w, v, ξ.
На значения оптимизируемых в задаче параметров wki, ξki, vi, k ∈ I+i,
i ∈ I, исходя из практических соображений, накладываются ограничения:
(2.4)
wki ∈ ΩWki, vi ∈ ΩV i, ξki ∈ Ωξki ≡ [0;lki], k ∈ I+i
,
i∈I,
Ωki = ΩWki × ΩV i × Ωξki.
Будем предполагать, что множества допустимых значений ΩW ki , ΩV i явля-
ются выпуклыми компактными.
Требуется найти такие значения компонент вектора υ = (w, v, ξ), при ко-
торых функционал
∫
∑
∑
(2.5)
ℑ(w, v, ξ) =
fki0(uki
(x), x)dx + Φ(u, u, w, v, ξ)
i∈I k∈I+
i
0
получает минимальное значение. Здесь заданные функции fki0(uki, x),
Φi(ui,ui,w,ξ,v) непрерывно дифференцируемы по своим аргументам и ис-
пользованы обозначения:
u = u(x) = (uki(x) : k ∈ I+i ,i ∈ I),
(
)T
(
)
ui = uik1(0),... ,uikni (0)
∈ Rni·ℵ, u =
ui : i ∈ I
∈Rn,
(
)T
(
)
ui = uk1i(lk1i),... ,uknii(lknii)
∈Rni·ℵ, u =
ui : i ∈ I
∈Rn.
Сформулированную задачу (2.1), (2.2), (2.4), (2.5) можно отнести к клас-
су параметрических задач оптимального управления. Оптимизируемый ко-
нечномерный вектор (w, ξ, v), определяющий параметры и месторасположе-
ния внешних источников, в реальных задачах имеет небольшую размерность,
несмотря на большую размерность самой системы дифференциальных урав-
нений (2.1). Определенную вычислительную сложность представляет реше-
ние краевой задачи (2.1), (2.2) при заданных значениях вектора (w, ξ, v).
Сложность обусловлена неразделенными (нелокальными) краевыми усло-
виями и, конечно, размерностью самой системы дифференциальных урав-
нений (2.1), так как при численном решении задачи оптимизации необходи-
мо многократно определять значение функционала при текущих значениях
оптимизируемого вектора (w, ξ, v), а следовательно, решать краевую зада-
чу (2.1), (2.2). Поэтому важно использовать как эффективные методы ре-
шения оптимизационной задачи, так и уделить особое внимание решению
краевой задачи (2.1), (2.2).
111
3. Необходимые условия оптимальности
Исследуем выпуклость и дифференцируемость функционала (2.5), полу-
чим формулы для градиента функционала и сформулируем необходимые
условия оптимальности относительно оптимизируемых параметров.
Теорема 1. Пусть выполнены все условия, наложенные на функции и
параметры, участвующие в задаче (2.1), (2.2), (2.4), (2.5). Если функции
fki0(uki,x), Φ(u,u,w,v,ξ) при фиксированном допустимом векторе ξ выпук-
лы по другим своим аргументам, то функционал ℑ(w, v, ξ) является выпук-
лым по w, v, а если хотя бы одна из этих функций сильно выпукла, то и
функционал является сильно выпуклым.
Доказательства теоремы 1 и всех последующих теорем приведены в При-
ложении.
Несложно доказать, что функционал ℑ(w, v, ξ) по ξ не является выпуклым,
если хотя бы для одного участка (k, i) ∈ J выполняется условие Bkiwki = 0,
т.е. имеются дуги, на которые не воздействуют внешние источники.
Далее исследуем дифференцируемость функционала (2.5) и получим фор-
мулы для компонент его градиента по оптимизируемой тройке υ = (w, v, ξ).
(
)
,
Введем следующие обозначения. Обозначим через cij = gik1j,...,gjkni
(
)
cij = qk1ij,... ,qknii
строчные векторы размерности соответственно ni · ℵ
j
(
)T
и ni · ℵ, через ui =
ui,ui
расширенный вектор размерности ni · ℵ. Пусть
(
)Mi,ni·ℵ
Ci = ci
, i ∈ I, есть расширенная матрица, каждая строка которой
js
j=1,s=1
является расширенным строчным вектором cij = (cij , cij) размерности ni · ℵ.
Согласно предположению о линейной независимости условий (2.2) имеет ме-
сто
(3.1)
rank Ci = Mi.
Так как матрица Ci имеет размерность Mi × (ni · ℵ), Mi ≤ ni · ℵ, i ∈ I, то из
⌢
матрицы Ci можно извлечь обратимую подматрицу (минор)
Ci с рангом, рав-
ным Mi. Изменив порядок столбцов, расширенную матрицу вновь обозначим
⌢
⌣
⌣
через Ci = [Ci,Ci]. Здесь
Ci - матрица, составленная из столбцов расширен-
⌢
ной матрицы Ci, не включенных в матрицу
Ci. Аналогично этому вектор ui
ui
)T, соответствующий мат-
Mi
⌢
рице
ui
µj,
(ni·ℵ)-Mi
⌢
j = 1,...,Mi
номера столбцов матрицы Ci, включенные в матрицу
Ci,
µj, j = 1,... ,(ni · ℵ - Mi)
номера столбцов матрицы Ci, включенные в
⌣
матрицу
Ci.
∕
∕
∕
∕
∕
Здесь и далее производные ∂fki0
∂uki, ∂Φ
∂u, ∂Φ
∂u, ∂Φ
∂w, ∂Φ
∂v,
∕
∂Φ
∂ξ будут пониматься как строчные векторы соответствующей раз-
∕
[
∕
∕
]
мерности. Из расширенных векторов
∂Φ
∂ui =
∂Φ
∂ui,∂Φ
∂ui
, ψi =
112
)T)T
((
) (T
∕
=
-ψi
, ψi
размерности ni · ℵ выделим векторы
∂Φ
ui =
(
)
(⌢
)T
∕
∕
⌢
⌢
= ∂Φ
ui1, . . . , ∂Φ
uiMi
,
ψi =
ψi1,... , ψi
с номерами компонент, со-
Mi
⌢
ответствующих номерам столбцов из Ci, включенных в матрицу
Ci.
Имеет место следующая теорема.
Теорема 2. Пусть выполнены условия, наложенные на функции и па-
раметры, участвующие в задаче (2.1), (2.2), (2.4), (2.5). Тогда функционал
(2.5) дифференцируем, а компоненты его градиента по оптимизируемым па-
раметрам wki, ξki, vi, k ∈ I+i, i ∈ I, определяются формулами:
(
)T
∂Φ
(3.2)
gradwki ℑ(w, v, ξ) = - Bki
ψki(ξki) +
,
∂wki
(
)T dψki(x)
∂Φ
(3.3)
gradξki ℑ(w, v, ξ) = - Bki
wki +
,
dx
∂ξki
x=ξki
)
((
)T
(
)T
⌢
∂Φ
⌢
∂Φ
1
(3.4)
gradvi ℑ(w, v, ξ) =
C-
+
ψi
+
,
i
ui
∂v
где непрерывно-дифференцируемые вектор-функции ψki(x) ∈ Rℵ, x ∈ [0, lki],
k ∈ I+i , i ∈ I, являются решениями сопряженной системы дифференциаль-
ных уравнений
dψki(x)
(∂fki0(uki(x),wki,ξki,vi))T
=
- (Aki(x))Tψki(x),
(3.5)
dx
∂uki
x ∈ (0,lki), k ∈ I+i , i ∈ I,
с неразделенными краевыми условиями
)
(
)T
((
)T
(
)T (
)T
∂Φ
⌣
⌣
⌢
∂Φ
⌢
1
(3.6)
+
ψi -
C-
+
ψi
= 0, i ∈ I.
Ci
i
ui
ui
Интересно отметить следующее. Во-первых, сопряженная задача (3.5),
(3.6) имеет ту же специфику, что и прямая задача. А именно система (3.5)
имеет блочную структуру, а краевые условия (3.6) во всех вершинах являются
неразделенными. Во-вторых, в выражениях компонент градиента функцио-
нала по параметрам (k, i)-й подсистемы, как видно из (3.2), (3.3), участвует
сопряженная функция только этой подсистемы. А в формулах для компонент
градиента функционала по источникам, воздействующих на i-ю вершину, как
видно из (3.4), участвуют краевые значения прямой и сопряженной перемен-
ных, определенных именно только в этой вершине.
Сформулируем необходимые условия оптимальности в вариационной фор-
ме [25-29] для задачи (2.1), (2.2), (2.4), (2.5) в виде следующей теоремы.
Теорема 3. Пусть выполнены условия, наложенные на функции и пара-
метры, участвующие в задаче (2.1), (2.2), (2.4), (2.5). Для оптимальности
113
1
2
1
3
3
2
4
5
6
7
4
5
8
6
7
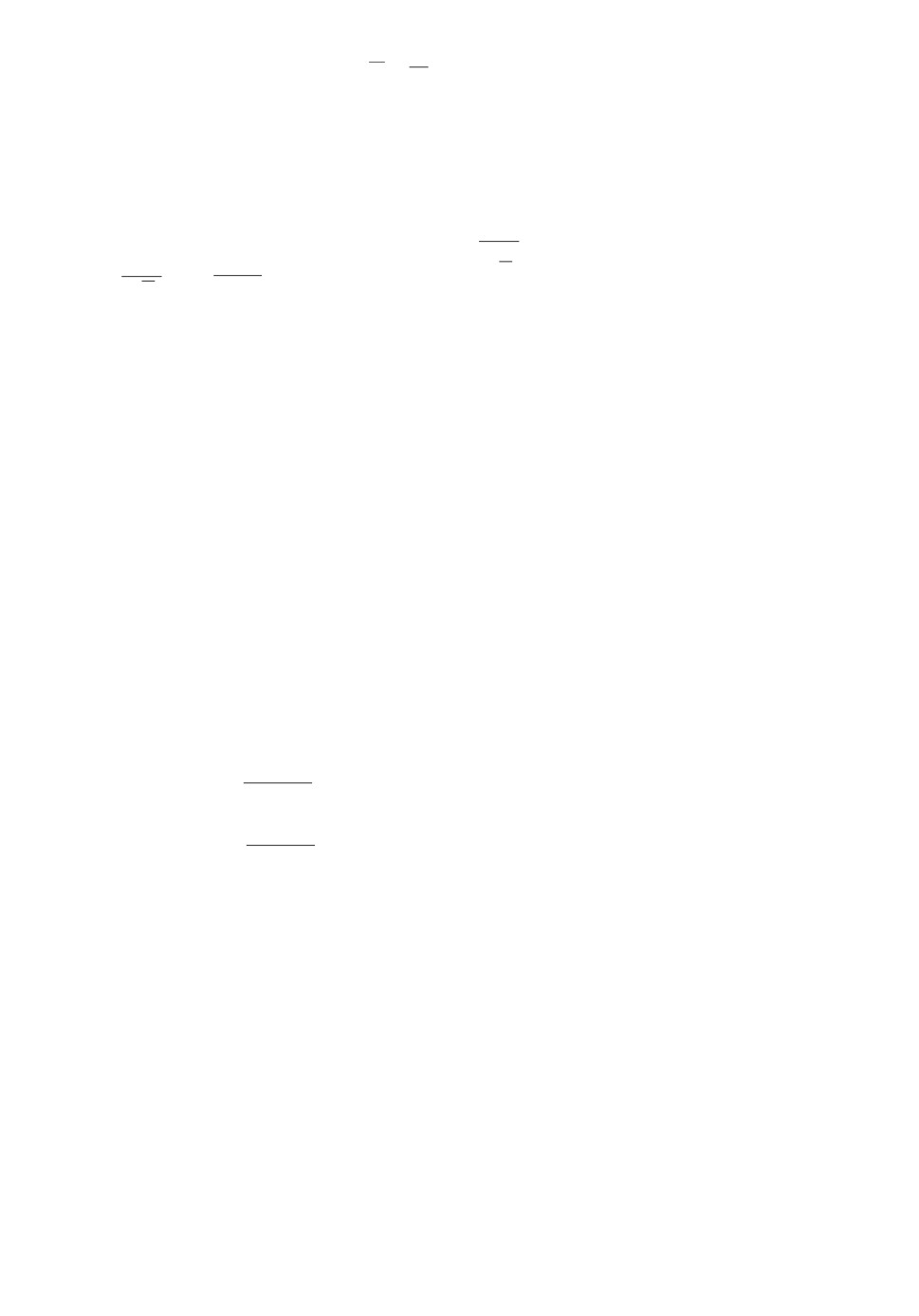
Рис. 1. Исходный граф - а, преобразованный граф - б .
параметров (wki∗, vi∗, ξki∗) ∈ Ωki, k ∈ I+i, i ∈ I, необходимо, чтобы неравен-
ства
(
)
(
)
gradwki
ℑ(w, v, ξ), wki - wki∗
≥ 0,
gradvi ℑ(w, v, ξ), vi - vi∗
≥ 0,
(
)
gradξki
ℑ(w, v, ξ), ξki - ξki∗
≥0
выполнялись для всех допустимых значений параметров (wki∗, vi∗, ξki∗) ∈
∈Ωki, k ∈ I+i, i ∈ I.
Отметим следующее. Рассматриваемые в статье многосвязные объекты
произвольной структуры можно за счет изменения направления дуг, а в слу-
чае необходимости введением дополнительных вершин привести к виду, когда
все вершины из I разбиваются на два непересекающихся подмножества: вер-
шины, у которых все ребра являются входящими (Iвх), и вершины, у которых
все ребра исходящие (Iисх), т.е. I = Iвх
⋃Iисх. Например, на рис. 1,а реб-
ро (5, 6) введением новой вершины (8) разбито на две дуги (8, 5) и (8, 6)
(рис. 1,б ), и тогда Iвх = {1, 3, 5, 6}, Iисх = {2, 4, 7}.
В этом случае условия (2.2) разбиваются на две группы условий
Ciui = vi, i ∈ Iвх,
ui = {uki : k ∈ I+i, i ∈ Iвх},
(3.7)
Ciui = vi, i ∈ Iисх,
ui = {uki : k ∈ I-i, i ∈ Iисх}.
Однако замена условий (2.2) условиями (3.7) в исследовании задачи (2.1),
(2.2), (2.4), (2.5) никаких преимуществ с теоретической точки зрения не дает.
Во многих практических приложениях внешние источники участвуют не
на всех звеньях и в вершинах объекта или же на некоторых звеньях или вер-
шинах их значения могут быть заданы и не оптимизироваться. В этих слу-
чаях соответствующие компоненты градиентов функционала gradwℑ(w, v, ξ),
gradvℑ(w, v, ξ), gradξℑ(w, v, ξ) не вычисляются и принимаются равными ну-
лю.
Замечание 1. Если в результате чисеннго решения задачи для до-
ξki
<ε,или
статочно малого ε будет получено или
wki
< ε, или
Rµki
<ε,тоэтоозначает,чтовнутри(k,i)-гозвенавнешнегоисточника
ξki - lki
<εили
<ε,тоэтоозначает,что
нет. Если же
wki
> ε, а
ξki
ξki - lki
Rµki
источник с параметрами wki воздействует на k-ю или i-ю вершину и соответ-
ственно значения параметров wki надо добавить к параметрам vk или vi.
114
В практических задачах в зависимости от знака параметров источни-
ка wki, k ∈ I+i, i ∈ I, внешний источник в точке ξki называется “оттоком”
или “притоком”.
4. Схема численного решения задачи
В этом разделе предлагается численная схема решения задачи (2.1),
(2.2), (2.4), (2.5). Отметим, что решение задачи требует рассмотрения за-
дач двух уровней: задачи минимизации функционала (верхний уровень)
[10, 11, 21, 22, 25-29] и краевой задачи (прямой и сопряженной) относительно
систем обыкновенных дифференциальных уравнений блочной структуры с
неразделенными краевыми условиями (нижний уровень) [12-14, 16].
Верхний уровень. Пусть допустимые множества Ωwki, Ωξki, Ωvi име-
ют простую структуру (шар, параллелепипед и т.п.). Для определения опти-
мальных значений υ = (w, v, ξ), применяя формулы (3.2), (3.3), (3.4) для вы-
числения компонент градиента функционала задачи (2.1), (2.2), (2.4), (2.5),
можно использовать эффективные методы оптимизации первого порядка, на-
пример метод проекции градиента [10, 11]:
t+1
t
wki
wki
gradwki ℑ(wt, vt, ξt)
,
vi
= PΩki vi
-αt
gradvi ℑ(wt, vt, ξt)
(4.1)
ξki
ξki
gradξki ℑ(wt, vt, ξt)
k ∈ I+i , i ∈ I, t = 1,2,...
Здесь PΩki [•] - оператор проектирования произвольной точки (wki, ξki, vi, )
на допустимое множество Ωki, αt ≥ 0 - шаг одномерной минимизации.
На каждой итерации процедуры
(4.1) требуется вычисление компо-
нент градиента функционала ℑ(w, v, ξ) при текущих значениях вектора
υ = (w,v,ξ). Для этого сначала решается прямая краевая задача (2.1), (2.2),
далее сопряженная краевая задача (3.5), (3.6). Результаты решения под-
ставляются в формулы (3.2), (3.3), (3.4) для вычисления компонент градиента
функционала.
Нижний уровень. Прямая (2.1), (2.2) и сопряженная (3.5),
(3.6)
краевые задачи являются двухточечными задачами специфической блочной
структуры большой размерности. Для их решения далее предлагается под-
ход, основанный на использовании предложенной в [12-14] операции переноса
неразделенных краевых условий, учитывающий специфику (большую раз-
мерность и блочную структуру) прямой и сопряженной начально-краевых
задач. Приведем соответствующие формулы, схемы, не требующие одновре-
менного решения всех подсистем систем (2.1) или (3.5). Подход позволяет
проводить прогонку каждого значения переменной из одного конца в другой
в каждом условии отдельно и поблочно. В результате потребуется решение
алгебраической системы уравнений со слабо и произвольно заполненной мат-
рицей относительно значений всех переменных задачи в одном из концов, а
далее решаются задачи Коши в отдельности для каждой подсистемы.
Сначала рассмотрим решение прямой задачи. Предлагаемый подход, как
и все подобные методы переноса условий, заключается в замене условий (2.2)
115
относительно вершин i ∈ I, содержащих значение uik(0), на эквивалентные
условия со значением uki(lki) при переносе вправо (при переносе влево
в замене условий, содержащих uki(lki), на условия со значением uik(0)). В ре-
зультате вместо условий вида (2.2) будут получены все M условий в виде
∑
(4.2)
qksijuksi(lksi) = rij , j = 1, Mi
,
i∈I,
s=1,ks∈I+i
при переносе условий (2.2) вправо или в виде
∑
(4.3)
,
i∈I,
giksjuiks (0)=rj,j=1,Mi
s=1,ks∈I-i
при переносе условий (2.2) влево. Получение условий вида (4.2) или (4.3)
будем осуществлять поэтапно. Чтобы избежать матричных операций, значе-
ние каждого состояния на одном из концов в каждом условии из (2.2) будем
переносить в другой конец отдельно и поблочно.
Условия (4.2) и (4.3) представляют собой систему M алгебраических
уравнений с M неизвестными относительно соответственно u(l) ∈ RM и
u(0) ∈ RM . После решения одной из этих систем относительно подсистем си-
стемы дифференциальных уравнений (2.1) получаем m задач Коши, которые
решаются независимо друг от друга.
Замечание 2. Во многих конкретных практических задачах большая
часть условий из (2.2) вместо общего вида (2.2), как указывалось, в целом
могут быть заданы в виде (3.7) или, более того, совпадают с условиями Коши
на левом или правом концах. Поэтому выбор направления переноса условий
влево или вправо следует осуществлять исходя из того, в каком из концов
локальных условий больше, в тот конец и переносить оставшиеся условия.
Изложим процесс переноса вправо граничного значения k-й функции
uik(x) в j-м условии для i-го узла из (2.2), предполагая, что среди компонент(
)
,...,giks
, ks ∈ I-i , s = 1,ni, имеются ненулевые. В про-
1
j,ℵ
тивном случае j-е условие прогонять вправо не надо, так как относительно
этой функции в этом условии участвует только значение uki(lki). Пусть от-
личный от нуля коэффициент есть gidj = 0ℵ, d ∈ I-i (0ℵ - ℵ-мерный вектор,
все компоненты которого равны нулю).
Отметим, что порядок выбора отличных от нуля коэффициентов неприн-
ципиален. Перенос значений решений подсистем из левого конца в правый
можно осуществлять в произвольной последовательности выбора как подси-
стем, так и самих ограничений.
Опреде
(
)
ция αidj(x) = αidj,1(x), . . . , αidj,ℵ(x) и скалярная функция γij(x) такие, что
(4.4)
αidj(0) = gidj(0), γij(0) = vij, d ∈ I-i
,
i∈I,
116
осуществляют перенос слева направо граничного значения решения (i,d)-й
подсистемы (2.1) в j-м условии для i-го узла из (2.2) вправо, если для про-
извольного решения uid(x) этой подсистемы во всех точках x ∈ [0, lid] вы-
полняется равенство
ni
∑
∑
(4.5)
αidj(x)uid(x) +
qksijuksi(lksi) = γij
(x).
giksjuiks(0)+
s=1,ks∈I-i\{d}
s=1,ks∈I+
i
Ясно, что условие (4.5), учитывая (4.4), при x = 0 совпадает с j-м условием
для i-го узла из (2.2). Функции αidj(x), γij(x) будем называть прогоночными.
Подставляя значения функций αidj(x), γij(x) при x = lid в (4.4), получим ра-
венство, эквивалентное j-му условию для i-го узла из (2.2):
ni
∑
∑
(4.6)
qksijuksi(lksi)+αidj(lid)uid(lid) = γij(lid
).
giksjuiks (0)+
s=1,ks∈I-i\{d}
s=1,ks∈I+
i
Прогоночные функции αidj(x), γij (x), используемые для переноса с одно-
го конца в другой граничных значений решений подсистем, участвующих в
краевых условиях (2.2), не единственны. В частности, конструктивное их по-
строение предложено в следующей теореме.
Теорема 4. Пусть gidj = 0ℵ для d ∈ I-i и ℵ-мерная вектор-функ-
ция αidj(x) и скалярная функция γij (x) при x ∈ (0, lid) являются решением
следующих задач Коши:
dαidj(x)
= -αidj (x)Aid(x), αidj (0) = gidj ,
dx
(4.7)
(
)
dγidj(x)
= αidj (x) fid(x) + Bkiwkiδ(x - ξki) ,
γij(0) = vij.
dx
Тогда эти функции являются прогоночными коэффициентами для пе-
реноса слева направо граничного значения uid(0) решения (i,d)-й подсисте-
мы (2.1) в j-м условии для i-го узла.
Указанная выше процедура переноса повторяется для значения следую-
щей функции uiks (x), ks ∈ I-i\{d}, у которой в новом полученном условии
вида (4.6) коэффициент gidj = 0ℵ. Это повторяется, пока в j-м условии для
i-го узла не перестанет участвовать какая-либо компонента вектора uiks (0),
ks ∈ I-i, s = 1,ni, с ненулевым коэффициентом. После этого необходимо пе-
рейти к (j + 1)-му условию для i-го узла из (2.2). Эта процедура повторяется
до тех пор, пока все условия (2.2) не будут приведены к виду (4.2).
Далее, решая систему алгебраических уравнений (4.2) (или (4.3)) M-го по-
рядка, определяются векторы uksi(lksi), ks ∈ I+i, s = 1, ni (при переносе влево
определяются uiks (0), ks ∈ I-i, s = 1, ni).
117
Для определения искомых вектор-функций uik(x), x ∈ [0, lki], k ∈ I+i, i ∈ I,
компоненты uki(lki), k ∈ I+i, i ∈ I, найденного вектора используются в каче-
стве начальных значений для соответствующих задач Коши относительно
каждой отдельной подсистемы системы (2.1), решаемых в обратном порядке:
от x = lki до x = 0, k ∈ I+i, i ∈ I.
Перенос условий может осуществляться также справа налево. Получение
вспомогательных задач Коши относительно прогоночных коэффициентов в
этом случае проводится аналогично.
Численное решение сопряженной краевой задачи (3.5), (3.6) большой раз-
мерности и блочной структуры проводится вполне аналогично изложенному
выше решению прямой задачи (2.1), (2.2).
Таким образом, выше приведена схема решения прямой и сопряженной
краевых задач большой размерности блочной структуры с произвольно свя-
занными блоками посредством только начальных и конечных значений фа-
зовых переменных. Видно, что приведенная схема решения этих краевых за-
дач позволяет легко распараллеливать вычислительный процесс по каждой
переменной в каждом условии (2.2), (3.6), причем эти процессы проводятся
поблочно, т.е. отдельно для каждой подсистемы (2.1), (3.5).
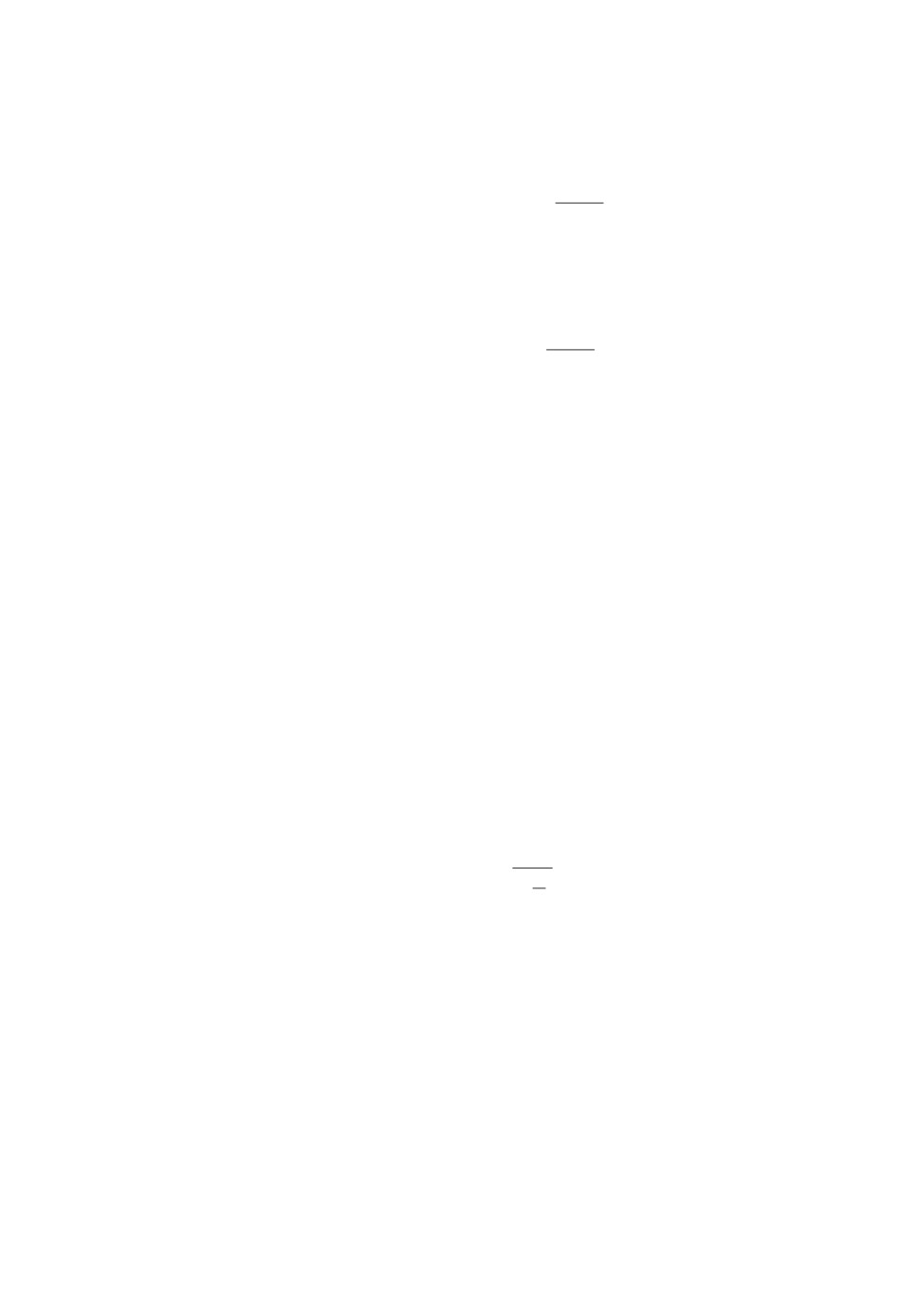
5. Результаты численных экспериментов
Приведем результаты численных экспериментов, полученные при решении
задачи оптимизации значений параметров и мест расположения источников
для объекта (рис. 2), в котором
N = 4, m = 3, ℵ = 2, M = 6, J = {(1,2),(3,2),(2,4)},
I = {1,2,3,4} , I+1 = ∅, I-1 = {2}, I+2 = {1,3}, I-2 = {4},
I+3 = ∅, I-3 = {2} , I+4 = {2} , I-4 = ∅, lki = 1, k ∈ I+i, i ∈ I.
Состояние каждого из трех подобъектов (блоков) описывается системой двух
обыкновенных дифференциальных уравнений:
du1,21
du1,22
=u1,22+x2-3x-2,
= xu1,21 - 2u1,22 + 5x+ 3,
dx
dx
3,2
du
du3,22
(5.1)
1
=u3,22+2-4x2+x+w3,2δ(x-ξ3,2),
= u3,21-xu3,22+5+3x2-2x,
dx
dx
du2,41
du2,42
=u2,42-x-2-w2,4δ(x-ξ2,4),
= u2,41-u2,42+5.
dx
dx
Ребра (блоки) (1, 2), (3, 2), (2, 4) связаны между собой начальными и/или
конечными (краевыми) значениями состояний в виде (2.2). В вершинах {1},
{3}, {4} задано по одному условию, а в вершине {2} заданы три условия:
M1 = 1, M2 = 3, M3 = 1, M4 = 1. В целом заданы 6 условий, из них три яв-
ляются неразделенными:
u1,21(0) = v1,
u3,22(1)-u2,42(0) = v21, u1,22(1)-u3,22(1) = v22,
(5.2)
u1,21(1)+u3,21(1)+u2,41(0) = v23, u2,31(0) = v3,
u4,22(1) = 0.
118
v1
3
w3,2
1
2
v3
v2
w2,4
4
Рис. 2. Граф рассматриваемого объекта.
Таким образом, в условиях (5.2) матрицы Ci, i = 1, 3, 4, имеют размерность
M1 × ℵ = 1 × 2, а размерность C2 равна M2 × n2ℵ = 3 × 6,
(
)
(
)
C1 = g1,21,1 g1,2
=
1
0
,
1,2
3,2
g2,41,1
g2,41,2
q1,21,1
q1,21,2
q3,21,1
q
1,2
0
-1 0 0 0
1
2,4
C2 =
g2,42,2
q1,22,1
q1,22,2
q3,22,1
q3,22,2
0
0
0
1
0
-1
,
g
2,1
=
1
0
1
0
1
0
g2,43,1
g2,43,2
q1,23,1
q1,23,2
q3,23,1
q3,2
3,2
(
)
(
)
(
)
(
)
(5.3)
C3 = g2,31,1 g2,3
=
1
0
,
C4 = q4,21,1 q4,2
=
1
0
1,2
1,2
Как видно из (5.1), (5.2), источники, воздействующие на звенья (3;2), (2;4)
и вершины {1}, {3}, {4}, являются однопараметрическими, на вершину {3} -
трехпараметрическим, а вершина {4} внешних источников не имеет: v4 ≡ 0,
т.е. w3,2, w2,4 ∈ R1, v1, v3 ∈ R1, v2 ∈ R3.
В задаче имеютсяограничения н значения параметров источников и их
месторасположения:
w3,2
≤1,
w2,4
≤1,0≤ξ3,2≤1,0≤ξ2,4≤1.
Предположим, что параметры источников и места их воздействия на за-
ранее заданных двух участках множества J и трех вершинах множества I
неизвестны и требуется их определить, минимизируя функционал
l1,2
[
]2
∫
[
]2
ℑ(υ) =
u1,22(x;υ) - ũ1,22(x)
dx +
u3,22(x;υ) - ũ3,22(x)
dx +
0
0
(5.4)
l2,4
[
]2
+
u2,42(x;υ) - ũ2,42(x)
dx.
0
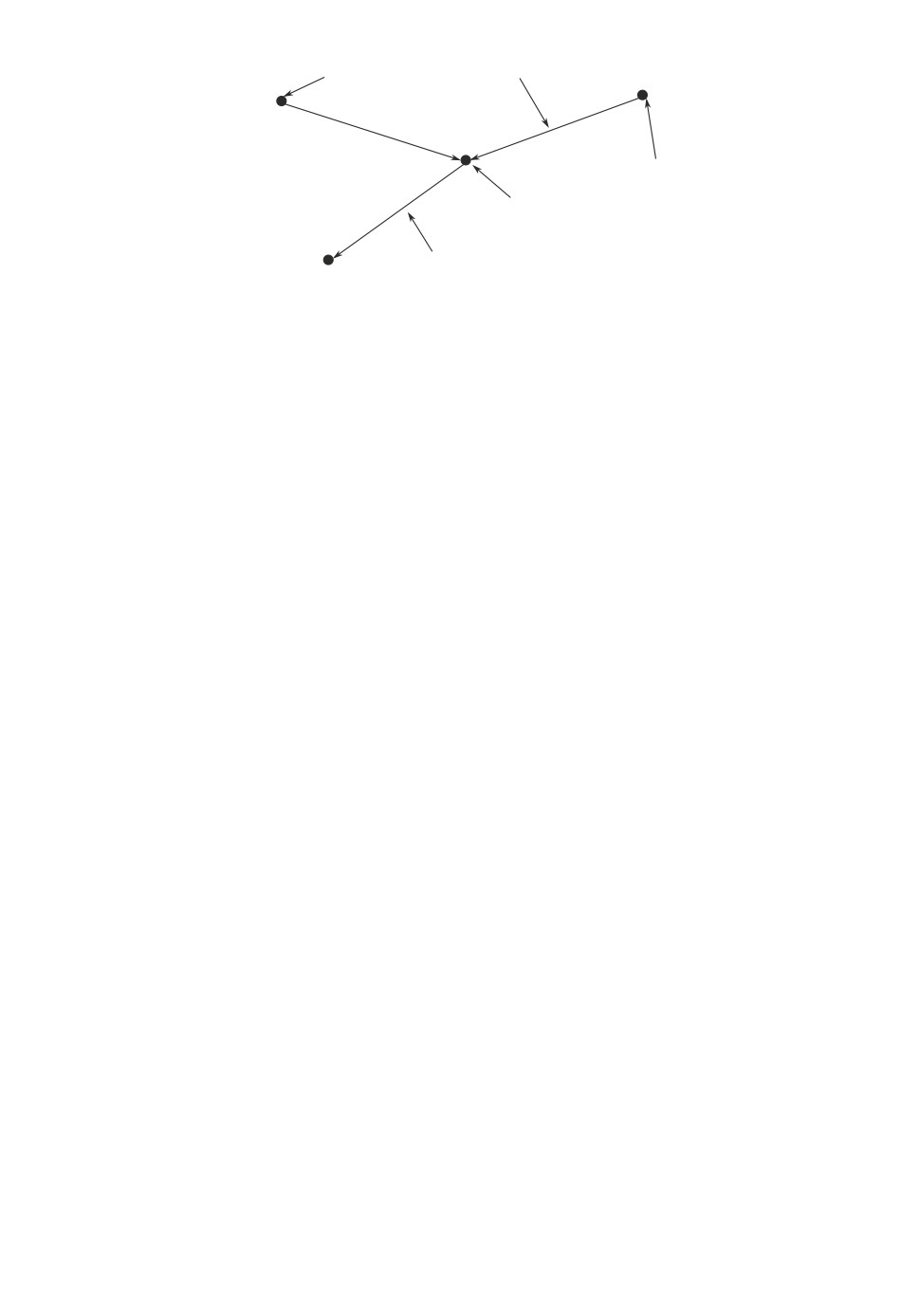
Для построения модельной задачи предполагалось, что функции ũ1,22(x),
ũ3,22(x), ũ2,42(x), определяющие желаемые значения первых компонент состоя-
ния подобъектов, заданы, и их графики приведены на рис. 3. Эти функ-
ции были получены численным решением краевой задачи (5.1)-(5.4) для
следующих параметров υ∗ = (w∗, v∗, ξ∗): v1∗= (1), v2∗= (0; 0; -1), v3∗ = (-2),
119
4
3
2
1
0
0,2
0,4
0,6
0,8
1,0
~ 1,2(x)2
~ 3,2(x)2
~ 2,4(x)
2
Рис. 3. Графики функций ũ1,22(x), ũ3,22(x), ũ2,42(x).
w3,2 = (0,2), w2,4 = (0,3), ξ3,2 = 0,5, ξ2,4 = 0,6, значения которых требовалось
определить минимизацией функционала (5.4).
Задача оптимизации (5.1)-(5.4) решалась для разных начальных значений
вектора υ0 с использованием описанной выше численной схемы. На верхнем
уровне для решения задачи оптимизации был использован метод проекции
градиента [10, 11].
Согласно формулам (3.6) сопряженная краевая задача имеет вид
dψ1,21
= -xψ1,22,dψ2,2
= 2[u1,22(x) - ũ1,22(x)] - ψ1,21 + 2ψ1,22,
dx
dx
3,2
dψ
(5.5)
1
= -ψ3,22,dψ2,2
= 2[u3,22(x) - ũ3,22(x)] - ψ3,21 + xψ3,22,
dx
dx
dψ2,41
= -ψ2,42,dψ2,4
= 2[u2,42(x) - ũ2,42(x)] - ψ2,41 + ψ2,42.
dx
dx
Учитывая (5.3), подматрицы матрицы Ci, i = 1, 3, 4, состоят из одного элемен-
⌢
⌢
та. Тогда обратные матрицы к одноэлементным матрицам
C1= (1),
C3= (1),
⌢
⌢
⌣
⌣
C4= (1) совпадают с самими матрицами
Ci, Pi = 1,3,4, а
C1= (0),
C3= (0),
⌣
⌢
C4= (0). Из матрицы C2 можно выделить подматрицу
C2 ранга M2 = 3, на-
пример,
3,2
g2,41,1
q1,21,2
q
1,2
0
0
1
⌢
2,4
01-1
,
q1,22,2
q3,22,2
C2=
g
2,1
=
1
0
0
g2,43,1
q1,23,2
q3,2
3,2
3,2
g2,41,2
q1,21,1
q
1,1
-1 0 0
⌣
2,4
0
.
C2=
q1,22,1
q3,22,1
0
0
g
2,2
=
0
1
1
g2,43,2
q1,23,1
q3,2
3,1
120
ui, i = (,3,4, с)ответс
(
)
(
)
⌢
матриц
u1 = u1,21(0)
u3 = u2,31(0)
u4 = u4,21(1) ,
⌣
а векторы, соо(ветств)ющие с(олбца ) подмат(иц
Ci) i = 1,3,4, являются
⌣
⌣
u1 = u1,22(0)
,
u3 = u2,32(0)
,
u4 = u4,22(1) . Столбцам подмат-
(
)T
⌢
риц
u2 = u2,41(0),u1,22(1),u3,22(1)
, а вектор, соот-
(
)T
⌣
ветствующий столбцам подматрицы
u2 = u2,42(0),u1,21(1),u3,21(1)
Тогда краевые условия во всех вершинах для сопряженной системы (5.5)
можно получить согласно (3.6) из следующих соотношений:
(
)T (
)T
⌣
⌢-1
C1
C1
ψ1,21(0) = ψ1,22(0),
-ψ2,41(0)
-ψ2,42(0)
(
)T (
)T
(
)T
-1 0 0
⌣
⌢-1
⌣
C2
C2
ψ1,22(1)
=
ψ1,21(1)
,
C2
= 0
0
1
,
0
0
1
ψ3,22(1)
ψ3,21(1)
(
)
0
1
1
(
)T (
)T
⌢-1
⌣
⌢-1
,
C2
T = 0 1 0
C3
C3
ψ2,31(0) = ψ2,32(0),
1
0
0
(
)T (
)T
⌣
⌢-1
C4
C4
ψ4,21(1) = ψ4,22(1).
Отсюда имеем:
ψ1,22(0) = 0, ψ2,32(0) = 0, ψ4,22(1) = 0,
(5.6)
-ψ1,22(1)-ψ3,22(1) = -ψ2,42(0),
-ψ2,41(0) = ψ1,21(1),
-ψ2,41(0) = ψ3,21
(1).
Градиент функционала согласно (3.2)-(3.4) определяется формулами:
gradw3,2 ℑ(w, v, ξ) = -ψ3,2(ξ3,2),
gradw2,4 ℑ(w, v, ξ) = ψ2,4(ξ2,4),
gradv1 ℑ(w, v) = -ψ1,21(0),
(
)
-ψ2,41(0)
ψ1,22(1) + ψ3,22(1)
⌢-1
T
=
,
gradv2 ℑ(w, v) =
C2
ψ1,22(1)
ψ1,22(1)
(5.7)
ψ3,22(1)
-ψ2,41(0)
gradv3 ℑ(w, v) = -ψ2,31(0),
dψ3,2(x)
gradξ3,2 ℑ(w, v, ξ) = - w3,2
,
dx
x=ξ3,2
dψ2,4(x)
gradξ2,4 ℑ(w, v, ξ) = w2,4
dx
x=ξ2,4
121
a
б
4
1,0E-06
3
5,0E-07
2
0,0E+00
1
0
-5,0E-07
-1
-1,0E-06
-1,5E-06
-20
0,2
0,4
0,6
0,8
1,0
0
0,2
0,4
0,6
0,8
1,0
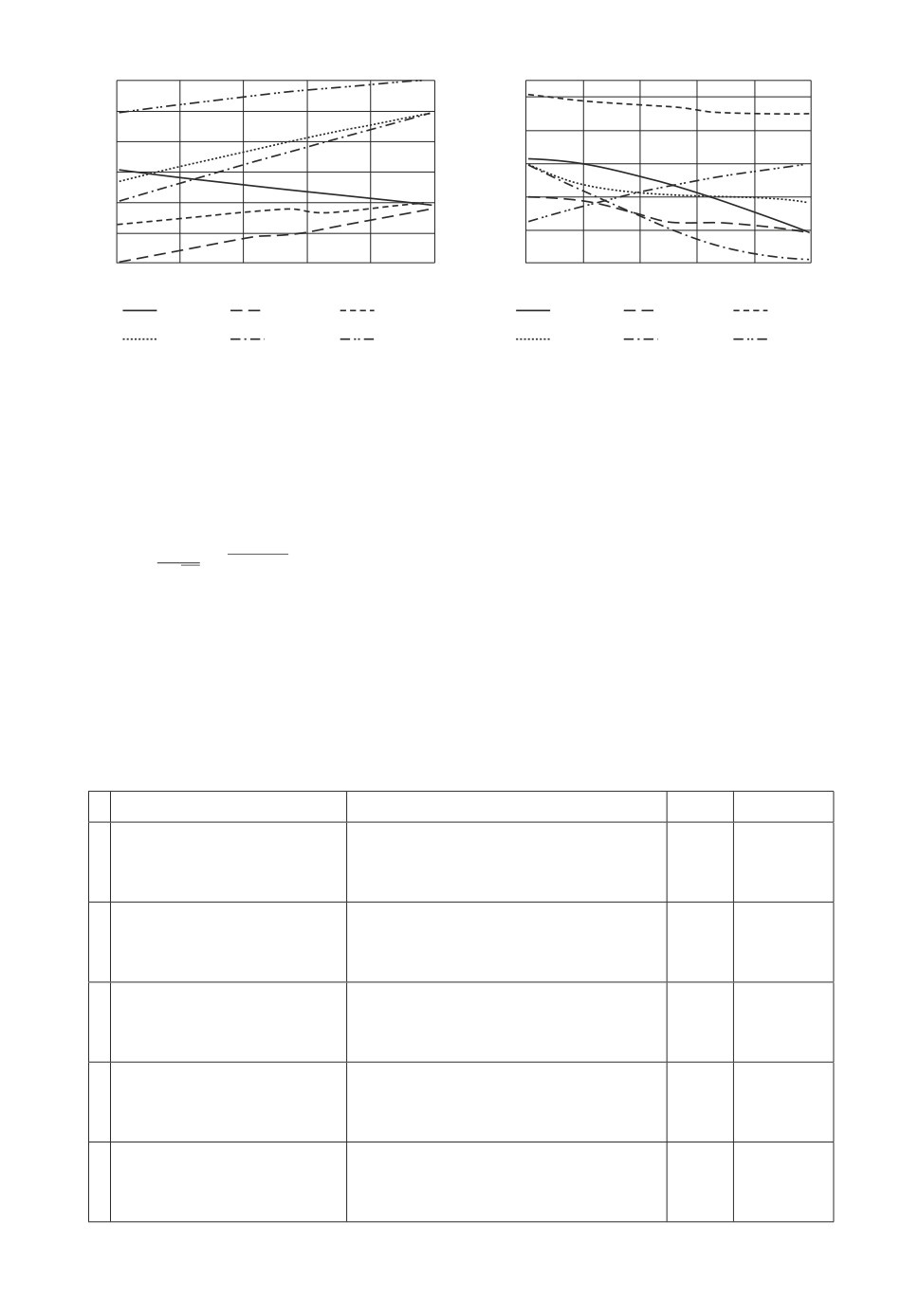
u 1,2(x),
u 3,2(x),1
u 2,4(x),1
y1,2(x),1
y3,2(x),1
y2,4(x),1
1
u 1,2(x),
u 3,2(x),
u 2,4(x)
y1,2(x),
y3,2(x),
y2,4(x)
2
2
2
2
2
2
Рис. 4. Графики функций, полученные в результате решения задачи (5.1)-(5.4).
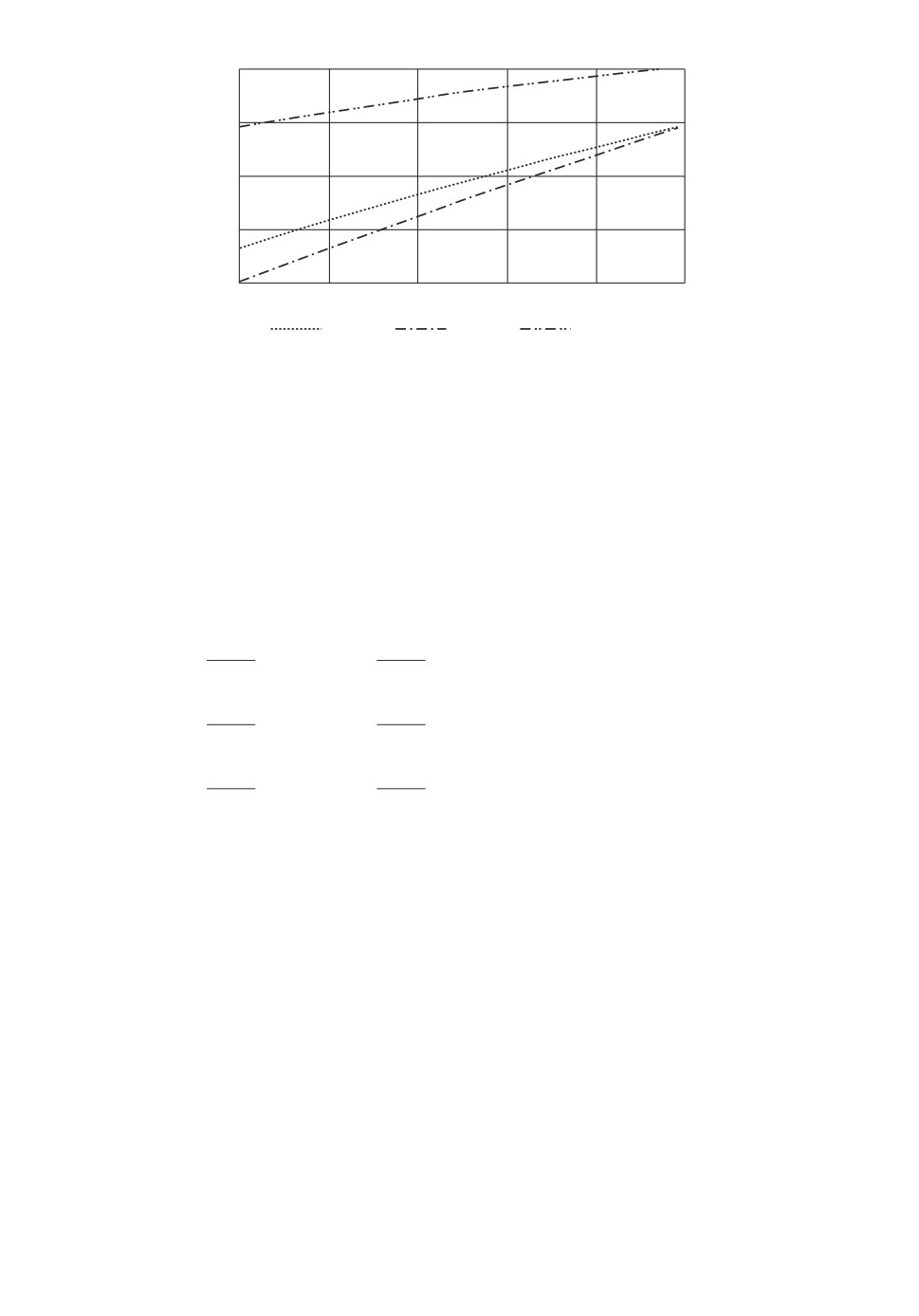
Для решения прямой и сопряженной краевых задач использовался метод
прогонки, основанный на теореме 1. Задачи Коши (5.1), (5.2) и (5.5), (5.6)
решались методом Рунге-Кутты четвертого порядка с шагом h = 0,01 [30].
Для аппроксимации δ(·)-функции Дирака использовалась функция Гаусса
(x-ξki)2
1
ϕ(x) =
√
e-
2σ2
, σ = 2h [21, 31].
σ
2π
В таблице приведены значения оптимальных параметров υ∗, полученные
методом проекции градиента для четырех различных начальных значений
параметров υ0.
На рис. 4,а и 4,б приведены графики соответственно решения прямой и
сопряженных задач для полученного значения параметров υ∗ = (w∗, v∗, ξ∗)
методом проекции градиента.
Таблица. Результаты численного решения задачи (5.1)-(5.4)
υ0 = (w0, v0, ξ0)
υ∗ = (w∗, v∗, ξ∗)
ℑ(υ0)
ℑ(υ∗)
((0,2; 0,72);
(0,1998; 0,2999); (0,9999; (0,0001;
1 (-1,7; (0; 1; -2,8); 0);
0,7713
2 · 10-9
0; -1); -1,999); (0,5; 0,5999)
(0,2; 0,36))
((0,3; 0,8);
((0,2033; 0,2960); (1,0001; -0,0038;
1 (-0,7; (0; 1,7; -2,7); 0,7);
-0,0002; -0,997); -2,0011);
1,2894
1,4 · 10-6
(0,43; 0,5))
(0,5001; 0,6001))
((0,6; 0,12 );
((0,2051; 0,3362); (0,9928; (-0,001;
2 (-1; (0; 1,7; -2,7); 0,7);
0,0063; -1,008); -2,0013); (0,49943; 1,5060
0,0001
(0,43; 0,5));
0,5957)
((0,28; 0,2 );
((0,2002; 0,3005); (1,0002; (-0,0016;
3 (-1; (0; 1,7; 0,7);
-2,7);
-0,0001; -1) -1,9999); (0,4998;
1,1639
4,4 · 10-8
(0,43; 0,45 ));
0,5999))
((0,28; 0,2);
((0,20004; 0,2999); (1; (0; 0,0002;
4 (-1,8; (0; 1,7; 0); -2);
0,2221 6,4 · 10-10
-0,9999) -2); (0,5; 0,59999))
(0,3; 0,6))
122
6. Заключение
Исследуется задача оптимизации, описываемая системой дифференциаль-
ных уравнений с обыкновенными производными большой размерности. Си-
стема уравнений имеет блочную структуру, сами блоки связаны между со-
бой в произвольном порядке лишь неразделенными начальными или конеч-
ными значениями фазовых переменных. В статье исследованы выпуклость
функционала, его дифференцируемость, получены необходимые условия оп-
тимальности как по параметрам, так и местам сосредоточения источников.
Показано, что сопряженная задача имеет ту же специфику, что и прямая
задача, а в выражениях компонент градиента функционала по параметрам
источников участвуют краевые значения прямой и сопряженной переменных,
определенных только в соответствующих вершинах и блоках. Это позволя-
ет легко распараллеливать решение прямой и сопряженной краевых задач,
что существенно повышает эффективность решение задачи оптимизации в
целом.
ПРИЛОЖЕНИЕ
Доказательство теоремы 1. Пусть wki1, vi1 и wki2, vi2 - произволь-
ные допустимые параметры из Wki × Vi, а uki1(x) и uki2(x) - соответствующие
решения краевых задач (2.1), (2.2), т.е.
duki1(x)
= Aki(x)uki1 (x) + Bkiwki1 δ(x - ξki) + fki(x),
(Π.1)
dx
x ∈ (0,lki), k ∈ I+i , i ∈ I,
ni
∑
∑
iks
(Π.2)
gj
qksijuksi1(lksi) = vi1j, j = 1,Mi
,
i∈I,
uiks1(0) +
s=1,ks∈I-
i
s=1,ks∈I+
i
duki2(x)
= Aki(x)uki2 (x) + Bkiwki2 δ(x - ξki) + fki(x),
(Π.3)
dx
x ∈ (0,lki), k ∈ I+i , i ∈ I,
∑
∑
iks
gj
qksijuksi2(lksi) = vi2j,
uiks2(0) +
(Π.4)
s=1,ks∈I-
i
s=1,ks∈I+
i
j = 1,Mi, i ∈ I.
В силу выпуклости допустимого множества Ωvi для произвольного λ ∈ [0; 1]
имеет место wki1 = λwki1 + (1 - λ)wki1 ∈ Ωwki . Обозначим uki(t) = λuki1(x)+
+(1 - λ)uki2(x).
Умножим обе части (П.1) на λ, а (П.3) на (1 - λ), почленно сложим
полученные равенства и сгруппируем
[
]
duki1(x)
duki(x)
2
λ
+ (1 - λ)
= Aki(x) λuki1 (x) + (1 - λ)uki2 (x) +
dx
dx
[
]
[
]
+ Bki λwki1 + (1 - λ)wki
2
δ(x - ξki) + λfki(x) + (1 - λ)fki(x) ,
x ∈ (0,lki).
123
(
)
Отсюда следует, что пара
uki(x),wki
удовлетворяет системе дифференци-
альных уравнений
duki(x)
= Aki(x)uki(x) + Bkiwkiδ(x - ξki) + fki(x),
dx
x ∈ (0,lki), k ∈ I+i , i ∈ I.
Умножая обе части (П.2) на λ, а (П.4) - на (1 - λ), складывая и группируя,
получим:
ni
∑
[
]
iks
gj
+
λuiks1(0) + (1 - λ)u2ks (0)
s=1,ks∈I-
i
∑
[
]
+
qksi
λuksi1(lksi) + (1 - λ)uksi2(lksi)
=
j
s=1,ks∈I+
i
= λvi1j + (1 - λ)vi2j , j = 1, Mi, i ∈ I.
(
)
Отсюда следует, что пара
uki(x),vi
удовлетворяет условиям
ni
∑
∑
iks
gj
uiks (0) +
qksijuksi(lksi) = vij, j = 1,Mi, i ∈ I.
s=1,ks∈I-
i
s=1,ks∈I+
i
В силу выпуклости функций fki0(uki, x) и Φ(u, u, w, v, ξ) по аргументам
u, w, v имеем:
ℑ(w, v, ξ) = ℑ(λw1 + (1 - λ)w2, λv1 + (1 - λ)v2, ξ) =
∫
∑
∑
=
fki0(λuki(x) + (1 - λ)uki(x),x)dx +
i∈I k∈I+
0
i
+ Φ(λu + (1 - λ)u,λu + (1 - λ)u,λw + (1 - λ)w,λv + (1 - λ)v,ξ) ≤
(Π.5)
∫
∫
∑
∑
≤
λ
fki0(uki(x),x)dx+ (1 - λ) fki0(uki(x),x)dx +
i∈I k∈I+
0
0
i
+ λΦ(u, u, w, v, ξ) + (1 - λ)Φ(u, u, w, v, ξ) ≤
≤ λℑ(w, v, ξ) + (1 - λ)ℑ(w, v, ξ).
Отсюда следует выпуклость функционала ℑ(w, v, ξ) по w и v. Ясно, что в
случае если одна из функций fki0(uki, x) и Φ(u, u, w, v, ξ) будет строго выпук-
лой, то знак неравенства в (П.5) будет строгим. Следовательно, и функцио-
нал задачи (2.1), (2.2), (2.4), (2.5) по w, v будет строго выпуклым. Теорема 1
доказана.
124
Доказательство теоремы 2. Используя метод приращения опти-
мизируемого вектора, докажем дифференцируемость и определим линейные
части приращения функционала [10, 11].
В системе уравнений (2.1) введем обозначения для оптимизируемых
сл(гаемых Wki = Wki(x; wki,)ki) = wkiδ(x - ξki), (k, i) ∈ J, W = W (x; w, ξ) =
=
Wki(x,wki,ξki) : (k,i) ∈ J
и запишем систему (2.1) так
duki(x)
= Aki(x)uki(x) + BkiWki(x;wki,ξki) + fki(x), (k,i) ∈ J.
dx
Пусть оптимизируемая тройка параметров υ = (w, v, ξ) получила прира-
щение Δυ = (Δw, Δv, Δξ). Обозначим: υ = υ + Δυ, w = w + Δw, v = v + Δv,
ξ = ξ + Δξ.
При этом получат приращения функция W (x; w, ξ) и решение краевой за-
дачи (2.1), (2.2):
ΔW(x;w,ξ) = W(x;w + Δw,ξ + Δξ) - W(x;w,ξ),
Δuki(x;υ) = uki(x;υ + Δυ) - uki(x;υ) = ũki(x; υ) - uki(x;υ), (k,i) ∈ J,
где uki(x; υ) и ũki(x; υ), (k, i) ∈ J - решения краевых задач (2.1), (2.2) при
оптимизируемых параметрах соответственно υ и υ = υ + Δυ.
Несложно показать, что Δuki(x; υ), (k, i) ∈ J являются решениями сле-
дующей системы краевых задач:
dΔuki(x)
(Π.6)
= Aki(x)Δuki(x) + BkiΔWki(x;wki,ξki
),
(k, i) ∈ J,
dx
∑
∑
iks
gj
Δuiks(0) +
qksijΔuksi(lksi) = Δvij,
(Π.7)
s=1,ks∈I-
i
s=1,ks∈I+
i
j = 1,Mi, i ∈ I.
Тогда для приращения функционала (2.5) будем иметь:
∫
∑
∑
ki
∂f
0
Δℑ(w,v,ξ) = ℑ( ŵ, v
ξ) - ℑ(w,v,ξ) =
Δuki(x) +
∂uki
(Π.8)
i∈I k∈I+
0
i
∂Φ
∂Φ
∂Φ
∂Φ
∂Φ
+
Δu +
Δu +
Δw +
Δv+
Δξ + η,
∂u
∂u
∂w
∂v
∂ξ
(
)
(Π.9) η = o
∥Δu(x)∥LM
,∥Δu∥Rn ,∥Δu∥Rn ,∥Δw∥Rµ ,∥Δξ∥Rm ,∥Δv∥RM
2
[0,l]
Здесь обозначено: fki0 = fki0(uki(x), x), Φ = Φ(u, u, w, v, ξ), η - остаточный член
в соответствующих пространствах функций и конечномерных векторов.
Как известно из теории дифференциальных уравнений [24], при сделанных
предположениях на данные, участвующие в задаче, имеет место оценка:
∥Δu(x)∥LM
≤ O (∥Δw∥Rµ ,∥Δξ∥Rm ,∥Δv∥RM),
[0,l]
2
125
а следовательно, имеют место оценки:
∥Δu∥Rn = ∥Δu(0)∥Rn ≤ O (∥Δw∥Rµ , ∥Δξ∥Rm , ∥Δv∥RM ) ,
∥Δu∥Rn = ∥Δu(l)∥Rn ≤ O (∥Δw∥Rµ , ∥Δξ∥Rm , ∥Δv∥RM ) .
Тогда из (П.9) имеем основную оценку
η = o(∥Δw∥Rµ ,∥Δξ∥Rm ,∥Δv∥RM),
откуда следует дифференцируемость функционала ℑ(w, v, ξ) по всем своим
аргументам.
Теперь получим формулы для компонентов градиента функционала за-
дачи по w, v, ξ. Для этого перенесем правые части уравнений (П.6) влево
и умножим равенства на пока произвольные непрерывно дифференцируе-
мые по своим аргументам ℵ-мерные вектор-функции ψki(x) ∈ Rℵ, x ∈ (0, lki),
k ∈ I+i , i ∈ I. Просуммируем полученные выражения, равные нулю, и проин-
тегрируем эту сумму по частям:
∫ [
)]
∑
∑
(dΔuki
(x)
0=
(ψki(x))T
-Aki(x)Δuki(x)-BkiΔWki(x, Δw, Δξ) dx =
dx
i∈I k∈I+
0
i
∑
∑
∑
(Π.10)
=
(ψki(lki))TΔuki(lki)
-
(ψik(0))TΔuik(0) -
i∈I
-
k∈I+
i
k∈Ii
)
∫ [((
)T
∑
dψki(x)
-
+ (ψki(x))TAki(x) Δuki(x) -
dx
k∈I+
i 0
]
}
− (ψki(x))TBkiΔWki(x, Δw, Δξ) dx
Прибавим правую часть (П.10) к (П.8), группируя, получим:
Δℑ(w,v,ξ) =
{[
]
∫
∑
∑
ki
∂f
( dψki(x))T
0
=
-
- (ψki(x))TAki(x) Δuki(x) -
∂uki
dx
i∈I k∈I+
0
i
(Π.11)
}
- (ψki(x))TBkiΔWki(x, Δw, Δξ) dx +
)
)
(∂Φ
(∂Φ
∂Φ
∂Φ
∂Φ
+
- (ψ)T Δu +
+ (ψ)T Δu +
Δw+
Δv+
Δξ +η,
∂u
∂u
∂w
∂v
∂ξ
(
)
(
)
где ψ =
ψi : i ∈ I
∈Rn, ψ = ψi : i ∈ I
∈ Rn, ψi = (ψik1(0),... ,ψikni(0))T,
ψi = (ψk1i(lk1i),... ,ψknii(lknii))T.
126
Преобразуем второе слагаемое в подынтегральном выражении (П.11) без уче-
та членов меньше первого порядка малости:
∫
∑∑
(ψki(x))TBkiΔWki(x, Δw, Δξ)dx =
i∈I k∈I+
i
0
∫
[
]
∑
∑
=
(ψki(x))TBki (wki + Δwki)δ(x - (ξki + Δξki)) - wkiδ(x - ξki) dx =
i∈I k∈I+
i
0
∫
∑
∑
=
(ψki(x))Tδ(x - (ξki + Δξki))dx Bki(wki + Δwki) -
i∈I k∈I+
0
i
∫
∑
∑
-
(ψki(x))Tδ(x - ξki)dx Bkiwki =
i∈I k∈I+
0
i
∑
∑
∑∑
=
(ψki(ξki + Δξki))TBki(wki + Δwki) -
(ψki(ξki))TBkiwki =
i∈I k∈I+i
i∈I k∈I+
i
∑
∑
∑∑
=
(ψki(ξki + Δξki))TBkiwki +
(ψki(ξki + Δξki))TBkiΔwki -
i∈I k∈I+i
i∈I k∈I+
i
∑
∑
-
(ψki(ξki))TBkiwki =
i∈I k∈I+i
(
)T
∑
∑
∑∑
dψki(x)
=
BkiwkiΔξki +
(ψki(ξki))TBkiΔwki.
dx
x=ξki
i∈I k∈I+i
i∈I k∈I+
i
Подставив полученное выражение в (П.11), после группировки получим
Δℑ(w,v,ξ) =
[
]
∫
∑
∑
ki
∂f
( dψki(x))T
0
=
-
- (ψki(x))TAki(x) Δuki(x)dx -
∂uki
dx
i∈I k∈I+
i
0
(
)T
∑
∑
∂Φ
dψki(x)
-
Bkiwki -
Δξki -
(Π.12)
dx
∂ξki
x=ξki
i∈I k∈I+
i
[
]
∑
∑
(
)T
∑
∂Φ
∂Φ
-
ψki(ξki)
Bki -
Δwki +
Δvi +
ki
∂w
∂vi
i∈I k∈I+
i∈I
i
[
)
)
]
(∂Φ
(∂Φ
+
- (ψ)T Δu +
+ (ψ)T Δu + η.
∂u
∂u
Займемся выражением в последней квадратной скобке.
127
Для простоты изложения приводимых далее выкладок вместо матрич-
ных и векторных операций будем использовать и покомпонентную их запись.
Условия (П.7) запишем в виде
ni
1
...giℵ11
... gik1n
·ℵ
Δui1
i
+
Δui
ni·ℵ
,ni
,n
·ℵ
i
ikni
ikni
ik1
q1
... q
...q
Δui1
Δvi1
1
...qiℵ11
1ni
1ni·ℵ
=
.
+
ikni
Δui
Δvi
...q
ni·ℵ
Mi
,ni
Mi,ni·ℵ
Используя обозначения, сделанные выше, соотношения (П.7) примут вид:
ci1,1
Δui1
Δvi1
ci1,(ni·ℵ)
=
(Π.13)
,
i∈I,
... ci
Δui
Δvi
ciMi,1
Mi,(ni·ℵ)
ni·ℵ
Mi
или в матричной форме:
CiΔui = Δvi, i ∈ I.
Тогда (П.13) можно записать так:
⌢
⌢
ci1,1
ci1,Mi
ui1
+
⌢
⌢
ui
c iMi,1
c iMi,Mi
Mi
⌣
⌣
ci
ci
ui1
1,1
1,(ni·ℵ-Mi)
Δvi1
=
+
⌣
⌣
ci
ui
Δvi
c iMi,1
Mi,(ni·ℵ-Mi)
(ni·ℵ)-Mi
Mi
или в виде:
⌢
(Π.14)
ui = Δvi
,
i∈I.
⌢
Учитывая (П.13),
Ci имеет обратную матрицу. Тогда из (П.14) имеем:
(
)-1
⌢
⌣
(Π.15)
ui = -
Ci
C-1iΔvi
,
i∈I.
Согласно (П.15) примем Mi-мерный вектор приращений
(
)T
uiM
)T = Δu⌢
,...,Δu⌢
i
µ1
µ
Mi
128
зависимым, а (niℵ - Mi)-мерный вектор
(
)T
uin
)T = Δu⌣
,...,Δu⌣
i·ℵ-Mi
µ1
µ
ni·ℵ-Mi
независимым. Учтем (П.15) в выражении последней квадратной скобки
(П.12):
)
)
)
∑
(( ∂Φ
(∂Φ
- (ψi)T Δui +
+ (ψi)T Δui
=
∂ui
∂ui
i∈I
)
∑
(∂Φ
=
+ (ψi)T Δui =
∂ui
i∈I
(
)
(
)
∑
⌢
∑
⌣
∂Φ
∂Φ
=
+(
ui +
+(
ui =
i
ui
u
i∈I
i∈I
(
)
(
)
∑
⌣
∑
⌢
⌢
⌣
∂Φ
∂Φ
1
=
+(
ui -
+(ψi)T
C-
ui+
i
ui
ui
i∈I
i∈I
)
∑
⌢
( ∂Φ
⌢
+
+(ψi)T
Ci
-1Δvi.
ui
i∈I
Учитывая это равенство в (П.12), для приращения функционала окончатель-
но получим:
Δℑ(w,v,ξ) =
[
]
∫
∑
∑
ki
∂f
( dψki(x))T
0
=
-
- (ψki(x))T Aki(x) Δuki(x)dx -
∂uki
dx
i∈I k∈I+
i
0
(
)T
∑
∑
∂Φ
dψki(x)
-
Bkiwki -
Δξki -
dx
∂ξki
x=ξki
i∈I k∈I+
i
(Π.16)
]
∑
∑
[(
)T
∂Φ
-
ψki(ξki)
Bki -
Δwki +
∂wki
i∈I k∈I+
i
(
)
]
∑
⌢
[∂
Φ
∂Φ
⌢
1
+
+
+(ψi)T
C-
Δvi +
i
∂vi
ui
i∈I
[
(
)
]
∑
∂Φ
⌣
∂Φ
⌢
⌢
⌣
1
+
+(ψi)T -
+(ψi)T
C-
ui + η.
i
ui
ui
i∈I
Пользуясь произвольностью вектор-функций ψki(x) ∈ Rℵ, k ∈ Iki, i ∈ I, по-
требуем от них равенства нулю выражений в квадратных скобках (множите-
ui). Получим краевую задачу (3.5), (3.6) относительно вектор-
функций ψki(x), k ∈ I+i, i ∈ I, которую будем называть сопряженной отно-
сительно задачи (2.1), (2.2). Искомые компоненты градиента функционала
129
ℑ(w, ξ, v) будут определяться линейными частями приращения функционала
(П.16) по приращениям Δwki, Δξki, Δvi по формулам (3.2), (3.3), (3.4).
Таким образом, можно считать доказанной теорему 2.
Доказательство теоремы 3 следует из дифференцируемости функ-
ционала задачи, компактности допустимых множеств Ωwki × Ωξki × Ωvi ,
k ∈ I+i , i ∈ I, конечномерности оптимизируемого вектора параметров зада-
чи и необходимых условий оптимальности в вариационной форме в задачах
оптимизации [10, 11].
Доказательство теоремы 4. Пусть αidj (x), γij(x) - пока произволь-
ные дифференцируемые функции, удовлетворяющие (4.5) и условию (4.6).
Продифференцируем условие (4.6), учитывая (i, d)-ю подсистему уравнений
из (2.1). После группировки соответствующих слагаемых, при d ∈ I-i полу-
чим
[
]
dαidj(x)
+ αidj (x)Aid(x) uid(x) +
dx
(Π.17)
[
]
(
)
(x)
dγid
j
+ -
+ αidj (x) fid(x) + Bkiwkiδ(x - ξki)
= 0.
dx
Учитывая произвольность функций αidj(x), γij (x) и необходимость выпол-
нения равенства (П.9) для всех решений uid(x) (i, d)-й подсистемы уравне-
ний (2.1), потребуем выполнения равенства нулю выражений в квадратных
скобках. Отсюда следует, что αidj(x), γij (x) являются решением задач Коши
(4.5)-(4.6). Теорема 4 доказана.
СПИСОК ЛИТЕРАТУРЫ
1. Lions J.L. Controle des Systemes Distributes Singuliers, Gauthier-Villars, Paris,
1987.
2. Миллер Б.М., Рубинович Е.Я. Задача импульсного управления с двумя типами
импульсных воздействий // АиТ. 2009. № 11. C. 34-54.
Miller B.M., Rubinovich E.Y. Impulsive Control with Impulsive Actions of Two
Types // Autom. Remote Control. 2009. V. 70. No. 11. P. 1795-1813.
3. Миллер Б.М., Рубинович Е.Я. Оптимизация динамических систем с импульс-
ным управлением. М.: Наука, 2005.
4. Aida-zade K.R., Ashrafova Y.R. Optimal Control of Sources on Some Classes of
Functions // Optimization: A Journal of Mathematical Programming and Operations
Research. 2014. V. 63. No. 7. P. 1135-1152.
5. Aida-zade K.R. Investigation of Non-Linear Optimization Problems of Networks
Structure // Autom. Remote Control. 1990. V. 51. No. 2. P. 135-145.
Айда-заде К.Р. Исследование нелинейных оптимизационных задач сетевой
структуры // АиТ. 1990. № 2. С. 3-14.
6. Айда-заде К.Р., Али-заде Р.И., Новрузбеков И.Г., Калаушин М.А. Декомпозици-
онный метод анализа и синтеза плоских механизмов // Механика машин. 1980.
Вып. 57. С. 26-30.
130
7.
Цурков В.И. Декомпозиция в задачах большой размерности. М.: Наука, 1981.
8.
Geiser J. Decomposition Methods for Differential Equations: Theory and Applica-
tions. CRC Press, Taylor and Francis Group, 2009.
9.
Черноусько Ф.Л. Оптимальное перемещение многозвенной системы в среде с
сопротивлением // Тр. ИММ УрО РАН. 2011. Т. 17. № 2. C. 240-255.
10.
Васильев Ф.П. Методы оптимизации. М.: Факториал Пресс. 2002.
11.
Поляк Б.Т. Введение в оптимизацию. 3-е изд. М.: Наука, 2019.
12.
Aida-zade K.R., Ashrafova Y.R. Solving Systems of Diferential Equations of Block
Structure with Nonseparated Boundary Conditions // J. of Applied and Industrial
Mathem. 2015. V. 9. No. 1. P. 1-10.
13.
Aida-zade K.R., Ashrafova Y.R. Calculation of the State of a System of Discrete
Linear Processes Connected by Nonseparated Boundary Conditions // J. of Applied
and Industrial Mathematics. 2016. V. 10. No. 4. P. 1-13.
14.
Ashrafova Y.R. On One Method of Block Transfer of Conditions for a System of
Three-Step Discrete Processes Connected Only by Boundary Conditions // Infor-
matics and Control Problems. 2019. V. 39. No. 2. P. 48-56.
15.
Абрамов А.А. О переносе граничных условий для систем линейных обыкновен-
ных дифференциальных уравнений (вариант метода прогонки) // Журн. вы-
числ. матем. и математ. физики. 1961. Т. 1. № 3. С. 542-545.
16.
Aida-zade K.R., Abdullaev V.M. On the Solution of Boundary Value Problems with
Nonseparated Multipoint and Integral Conditions // Diff. Equations. 2013. V. 49.
No. 9. P. 1114-1125.
17.
Воеводин А.Ф., Шугрин С.М. Методы решения одномерных эволюционных си-
стем, Новосибирск: ВО Наука, 1993.
18.
Самарский А.А., Николаев Е.С. Методы решения сеточных уравнений. М.: Нау-
ка, 1978.
19.
Абрамов А.А., Бураго Н.Г. и др. Пакет прикладных программ для решения ли-
нейных двухточечных краевых задач // Сообщения по программному обеспече-
нию ЭВМ. М.: ВЦ АН СССР, 1982.
20.
Быков А.Н., Ерофеев А.М., Сизов Е.А., Федоров А.А. Метод распараллеливания
прогонки на гибридных ЭВМ // Вычислительные методы и программирование.
2013. № 14. C. 43-47.
21.
Aida-zade K.R., Bagirov A.H. On the Problem of Placement of Oil Wells and Control
of Their Flow-rates // Autom. Remote Control. 2006. No. 1. P. 52-61.
Айда-заде К.Р., Багиров А.Г. О задаче размещения нефтяных скважин и управ-
ления их дебитами // АиТ. 2006. № 1. С. 52-62.
22.
Aida-zade K.R., Ashrafova E.R. Numerical Solution to the Problem of Determina-
tion of Places and Volume of the Fluid Leakage under Non-stationary Regimes in a
Pipeline Network // Computational Mathematics and Mathematical Physics. 2017.
V. 57. No. 12. P. 1919-1934.
23.
Тихонов А.Н., Самарский А.А. Уравнения математической физики. М.: Наука,
1972.
24.
Тихонов А.Н., Васильева А.Б., Свешников А.Г. Дифференциальные уравнения.
М.: Физматлит, 2005.
25.
Васильева О.О., Мизуками К. Динамические процессы, описываемые краевой
задачей: необходимые условия оптимальности и методы решения // Изв. АН.
Теория и системы управления. 2000. № 1. C. 95-100.
26.
Ащепков Л.Т. Оптимальное управление системой с промежуточными условия-
ми // ПММ. 1981. Т. 45. Вып. 2. С. 215-222.
131
27. Vasilieva O.O., Mizukami K. Optimality Criterion for Singular Controllers: Linear
Boundary Conditions // J. Math Anal. and Appl. 1997. V. 213. No. 2. P. 620-641.
28. Sharifov Y.A., Mammadova N.B. Optimal Control Problem Described by Impulsive
Differential Equations With Nonlocal Boundary Conditions // Differ. Equations.
2014. V. 50. No. 3. P. 403-411.
29. Abdullayev V.M. Numerical Solution to Optimal Control Problems with Multipoint
and Integral Conditions // Proc. of the Institute of Mathematics and Mechanics.
2018. V. 44. No. 2. P. 171-186.
30. Самарский А.A. Теория разностных схем. М.: Наука. 1983.
31. Бутковский А.Г., Пустыльников Л.М. Теория подвижного управления систе-
мами с распределенными параметрами. М.: Наука, 1980.
Статья представлена к публикации членом редколлегии Б.М. Миллером.
Поступила в редакцию 07.06.2020
После доработки 13.02.2021
Принята к публикации 16.03.2021
132