Автоматика и телемеханика, № 9, 2021
Линейные системы
© 2021 г. В.С. ВЕРБА, член-корр. РАН, д-р техн. наук (vvs.msk@gmail.com)
(АО “Концерн “Вега”, Москва)
МЕТОДЫ НАВЕДЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ
СО СМЕНОЙ ПРИОРИТЕТОВ УПРАВЛЕНИЯ1
Рассмотрены варианты реализации смены управленческих приорите-
тов в процессе наведения летательных аппаратов, основанные на исполь-
зовании нестационарных моделей состояния, переменных коэффициентов
штрафов функционалов качества и учете несоответствия динамических
свойств перехватчика и цели. Для каждого варианта приведены конкрет-
ные примеры синтеза метода наведения и проведен их анализ.
Ключевые слова: смена управленческих приоритетов, локальная оптими-
зация систем наведения, нестационарные методы самонаведения.
DOI: 10.31857/S0005231021090026
1. Введение
Современное противоборство в воздушно-космической сфере характеризу-
ется групповым применением как средств нападения, так и защиты с быстрой
сменой обстановки и скоротечностью боестолкновений уже в процессе при-
менения средств поражения [1, 2].
Изменение текущей обстановки, связанное с появлением более опасных
или более благоприятных для поражения целей, при групповом противостоя-
нии или выявлении либо защите приоритетных целей (авиационных комплек-
сов радиолокационного дозора и наведения [3], самолетов-ретрансляторов,
топливозаправщиков [4] и т.д.) предопределяет необходимость изменения
приоритетов уже пущенных ракет.
Кроме того, весьма перспективным при групповых действиях является
пуск ракет-перехватчиков в центр группы с выбором конкретной цели, в том
числе и приоритетной в процессе приближения к группе [5].
При этом необходимо отметить все нарастающую сложность требований,
предъявляемых к используемым методам наведения [6], обусловленную необ-
ходимостью одновременного удовлетворения нескольким, зачастую противо-
речащим друг другу, критериям. В частности, к таким задачам можно отне-
сти индивидуальное наведение на отдельную цель (например, наиболее опас-
ную, приоритетную и т.д.) в составе плотной неразрешаемой по угловым коор-
1 Работа выполнена при финансовой поддержке Российского фонда фундаментальных
исследований (проект № 19-08-00060-а).
73
динатам классическими способами группы, когда вначале необходимо разре-
шить цели за счет траекторного управления наблюдением [5, 7], обеспечивая
тем самым ее автоматическое сопровождение, а затем на конечном участке
обеспечить минимизацию линейного промаха [8] по выбранной цели.
Еще одним примером необходимости решения двухкритериальных задач
для летательных аппаратов (ЛА) является формирование сигналов совмест-
ного группового управления, которое должно обеспечить и полет по марш-
руту, и построение требуемой топологии (строя) участников.
Можно привести еще целый ряд новых многокритериальных задач управ-
ления.
В связи с этим весьма актуальной становится задача оптимизации законов
управления ЛА со сменой приоритетов в процессе функционирования. Эта
задача может решаться различными способами. Наиболее простой способ
принудительная смена закона управления через определенное время полета,
в том числе и путем введения в него дополнительных слагаемых, либо прину-
дительная смена в используемом законе требуемых координат состояния [9].
Однако такой способ приводит к появлению дополнительных, достаточно зна-
чительных переходных процессов, которые отрицательно сказываются как на
стабильности траектории полета, так и на работе информационных систем,
особенно систем сопровождения по угловым координатам.
Более рациональным является способ постепенной смены приоритетов
управления на основе использования нестационарных методов наведения [6],
не приводящий к появлению значительных переходных процессов при фор-
мировании траектории полета.
Частично вопросы такого управления летательными аппаратами в изме-
няющейся обстановке рассмотрены в [10-14].
Цель статьи рассмотреть на конкретных примерах возможные наибо-
лее эффективные варианты синтеза нестационарных законов наведения ЛА,
обеспечивающих плавное перераспределение управленческих приоритетов в
процессе полета.
В основу этих вариантов будут положены:
• использование нестационарных моделей состояния;
• использование переменных коэффициентов в матрице штрафов за вели-
чину управления;
• использование переменных коэффициентов в матрицах штрафов за точ-
ность функционирования;
• учет несоответствия динамических свойств цели и перехватчика.
В свою очередь, определение момента начала перераспределения управ-
ленческих функций может выполняться по различным признакам:
• по достижении координатами состояний тех или иных значений (дально-
сти, скорости, углов и т.д.);
• по факту приближения к максимально допустимым ошибкам управления
либо ошибкам автоматического сопровождения;
• по факту достижения определенных перегрузок и т.д.
74
В общем случае задача синтеза управления с перераспределением приори-
тетов в процессе траекторного управления может решаться различными спо-
собами [15]. Далее она будет решаться на основе наиболее простой разновид-
ности локальной оптимизации статистической теории оптимального управле-
ния. Эта модификация позволяет для системы [8]
(1)
x(t) = F(t)x(t) + B(t)u(t) + ξx(t), x(0) = x0,
включающей n-мерную модель требуемого движения цели
(2)
xТ(t) = FT(t)xТ(t), xТ(0) = xТ0
и n -мерную модель перехватчика
(3)
xу(t) = Fу(t)xу(t) + Bу(t)u(t) + ξy(t), xу(0) = xу0,
при наличии измерений
(4)
z(t) = Hx(t) + ξи
(t)
сформировать управление
(5)
u(t) = K-1BTyQ (xT(t) - xу
(t)) ,
минимизирующее функционал качества
∫t
(6)
I =M
uT(t)K(t)u(t)dt + (xТ(t) - xу(t))TQ(t)(xТ(t) - xу(t))
0
в каждый текущий момент времени t.
Здесь u r-мерный (r ≤ n) вектор управления; xТ и xу векторы опти-
мальных оценок процессов (2) и (3) формируемых по измерениям (4), ξx(t),
ξу(t) и ξи(t)
центрированные векторы гауссовских возмущений состояния
и измерений с известными матрицами интенсивностей.
FТ(t), Fу(t) и Bу(t) в общем случае нестационарные матрицы внутрен-
них связей и эффективности управления; Q(t) и K(t) неотрицательно и
положительно определенные матрицы штрафов за неточность функциони-
рования и величину сигналов управления; z m-мерный (m ≤ 2n) вектор
измерений; H матрица связи измерений и состояния; М - знак операции
математического ожидания.
2. Перераспределение приоритетов управления при использовании
нестационарных моделей состояния
В математическом плане задача синтеза закона управления в горизонталь-
ной плоскости формулируется следующим образом.
75
Для объекта управления, угловое положение которого относительно по-
движной цели определяется системой уравнений [8]:
jГ - jЦГ
(7)
ϕГ = ωГ +
,
Д
2Д
jГ - jЦГ
(8)
ωГ = -
ωГ -
+ξωГ,
Д
Д
предназначенного для наведения в упрежденную точку встречи под уг-
лом ϕГТ, необходимо сформировать сигнал управления jГ, оптимальный по
минимуму функционала
]T [
∫
[ϕГТ - ϕГ
qϕ
0
(9)
I =My
+
j2Гkjdt
,
0-ωГ
0
qω
0-ωГ
0
который обеспечивает устранение угловых ошибок
(10)
Δϕ = ϕГТ - ϕГ
и линейных промахов [8]
Д2ωГ
(11)
h=
Vотн
Здесь ϕГТ - требуемый и ϕГ - текущий бортовые пеленги, ωГ - угловая
скорость линии визирования, Д иД - дальность до цели и скорость ее измене-
ния, jЦГ - поперечное ускорение цели, qϕ, qω и kj - коэффициенты штрафов
за величину угловых ошибок ϕГТ - ϕГ, линейного промаха (11) и величину
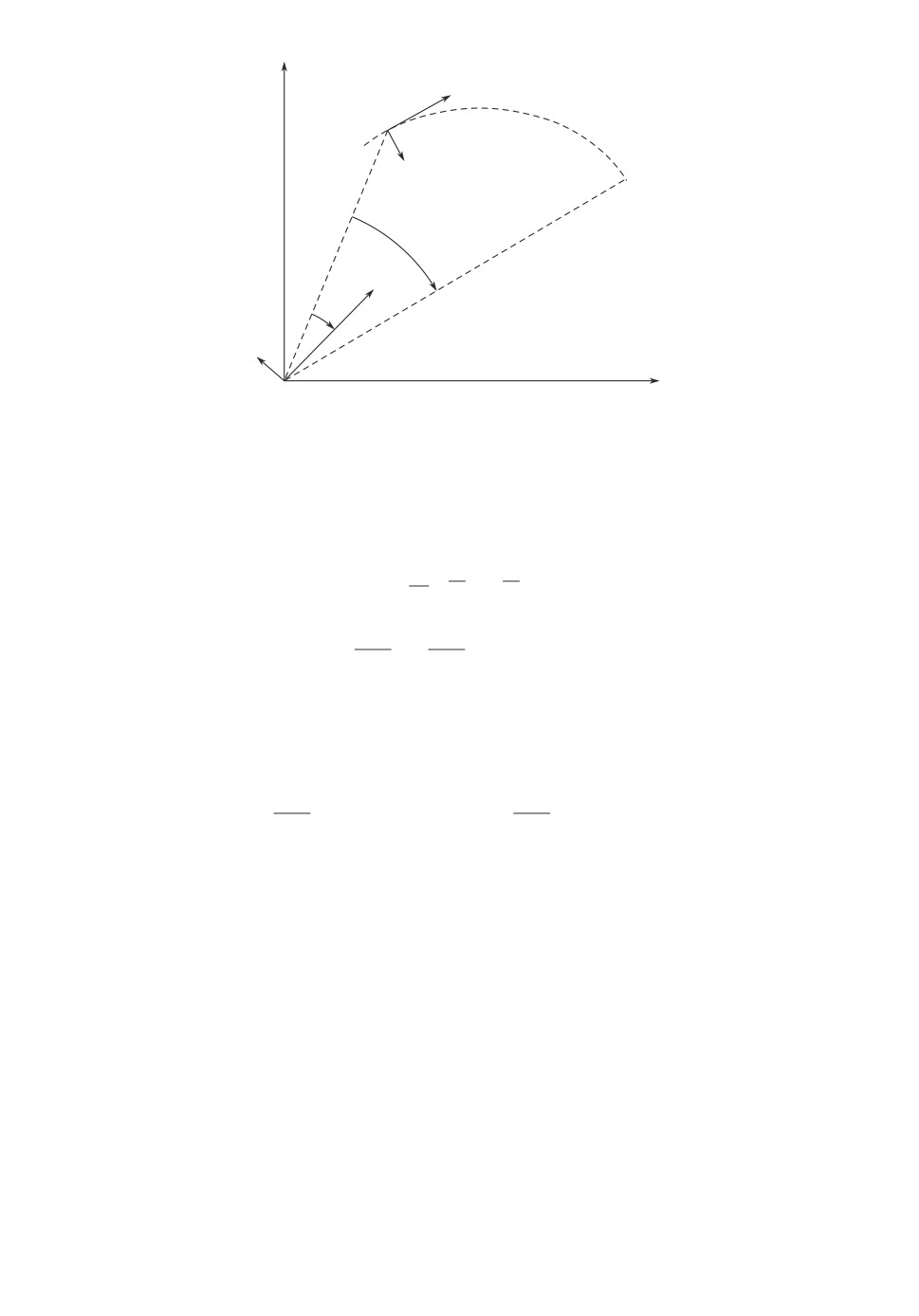
сигнала управления. Геометрия взаимного расположения цели и перехват-
чика при использовании (7)-(10) показана на рис. 1, на котором OП, OЦ и
OУТВ - соответственно точки расположения перехватчика, цели и упрежден-
ной точки встречи, а VЦ и VП - векторы скорости цели и перехватчика.
Выбор в качестве управляющего сигнала наводимого объекта (7), (8) попе-
речного ускорения jГ, а не углов отклонения аэродинамических рулей обус-
ловлен необходимостью обеспечить его инвариантность к высоте полета, по-
скольку эффективность рулей зависит от плотности воздуха (высоты полета).
При таком подходе с увеличением высоты (снижении плотности воздуха) ав-
томатически будут увеличиваться углы отклонения рулей до величин, реали-
зующих требуемые значения поперечной перегрузки.
Поставив в соответствие (7)-(10) с (1)-(6), будем иметь совокупность
векторно-матричных соотношений, в которых для упрощения записей будет
опущена зависимость векторов и матриц от времени
]
]
]
[ϕ
[ϕГ
[0
xТ =ГТ
,
xy =
,
u=jГ -jЦГ, ξx =
,
0
ωГ
ξy
[
]
]
1/Д
[qϕ
0
(12)
Bу =
,
Q=
,
K=kj.
-1/Д
0
qω
76
Z
VЦ
OЦ
jЦГ
УТВ
O
jГТ
Д
VП
jГ
jГ
OП
X
Рис. 1. Геометрия взаимного расположения цели и перехватчика при исполь-
зовании представлений (7)-(10).
Используя (12) в (5), получим
]
1
[1
1
][qϕ
0
]
ϕГТ -
ϕГ
-
u = K-1BTу Q(xТ - xу) =
=
kj
Д
Д
0
qω
0-ωГ
]
[ qϕ
qω ][ˆϕГТ -
ϕГ
-
=
Д
kjД
kj
0-ωГ
Тогда:
(13)
jГ = Kϕ
ϕГТ -
ϕГ) + Kω ωГ +jЦГ;
qϕ
qω
Д<0;
(14)
Kϕ =
,
Kω =
,
Kω ≤ Kωmax.
Д
kj Д
kj
Анализ (13), (14) позволяет сделать следующие выводы.
На больших расстояниях, когда ωГ → 0, коэффициент передачи угловой
скорости qω/kj Д также мал. Основным приоритетом управления, опреде-
ляемого первым слагаемым (13), становится устранение угловой ошибки
ϕГТ - ϕГ (рис. 1), что обеспечивает полет по требуемому направлению ϕГТ.
По мере подлета к цели увеличиваются как значения ωГ, так и коэффициен-
та ее передачи qω/kj Д. В итоге, начиная с некоторой дальности при малых
значениях уже устраненной угловой ошибки ϕГТ - ϕГ, превалирующим ста-
новится второе слагаемое, реализующее устранение линейного промаха (11).
Специфической особенностью (13), (14) является гиперболический харак-
тер изменения коэффициента передачи Kω, нелинейно нарастающего по мере
уменьшения дальности (рис. 2). С одной стороны, это усиливает тенденцию
уменьшения линейных промахов (11), а с другой стороны, предопределяет
введение ограничения на Kω.
77
Кw
Кw max
0
Д
Рис. 2. Зависимость Kω от дальности.
В состав системы наведения, реализующей (13), (14), должны входить
устройства формирования оценок дальности Д, скоростиД, требуемого бор-
тового пеленга ϕГТ, текущего пеленга ϕГ, угловой скорости ωГ и поперечного
ускорения цели jЦГ.
Сигнал управления зависит не от абсолютных значений штрафов, а от их
соотношения qϕ/kj и qω/kj , что существенно облегчает их выбор. Правила
выбора рациональных соотношений коэффициентов штрафов рассмотрены
в [8, 16].
В заключение необходимо отметить, что метод (13), (14), обеспечивая пере-
хват маневрирующих целей за счет учета jЦГ, также является всеракурсным
и всевысотным [8] и при наведении в упрежденную точку встречи обеспечи-
вает полет по более прямолинейной траектории с соответствующим умень-
шением затрат на управление.
3. Перераспределение управляющих функций
при использовании нестационарной матрицы штрафов
за величину сигнала управления
Задача синтеза управления летательным аппаратом в горизонтальной
плоскости формулируется следующим образом.
Для объекта управления (7), (8) необходимо сформировать сигнал управ-
ления jГ, оптимальный по минимуму функционала
]T [
∫
)
[ϕГТ - ϕГ
qϕ
0
(-kj
(15)
I =My
+
j2
Г
0-ωГ
0
qω
0-ωГ
Д
dt.
0
Сравнивая (7), (8) и (15) с (2), (3), (6), получим
]
]
]
[ϕ
[ϕГ
[0
xТ =ГТ
,
xy =
,
u=jГ -jЦГ, ξx =
,
0
ωГ
ξy
[
]
]
1/Д
[qϕ
0
(16)
Bу =
,
Q=
,
K=-
kj .
-1/Д
0
qω
Д
78
Отличием (15) и (16) от (9) и (12) является зависимость матрицы штра-
фа K от скорости сближения.
Подставляя (16) в (5), получим:
[
]
]
Д
[1
1
][qϕ
0
]
Д
]
ϕГТ -
ϕГ
qϕ qω
ϕГТ -
ϕГ
u=-
-
= -
;
kj
Д
Д
0
qω
0-ωГ
0-ωГ
kj kj Д
(17)
jГk = Kϕk
ϕГТ -
ϕГ) - Kωk ωГ +jЦГ;
Д
qϕ
qω
(18)
Kϕk = -
;
Kωk =
,
Kωk ≤ Kωmax.
kj
kj Д
Алгоритм траекторного управления (17), (18) качественно повторяет за-
кон (13), (14), поэтому для него справедливы выводы, сделанные при анализе
в разделе 2. Отличия состоят в утрате зависимости Kϕk от скорости сближе-
ния, что упрощает выбор значений коэффициентов штрафов qϕ и qω, при
которых начинается превалирование управления, минимизирующего линей-
ный промах (11). При этом усложняется зависимость коэффициента Kωk от
условий применения, поскольку он учитывает еще и зависимость от скорости
сближения.
4. Перераспределение приоритетов управления при использовании
нестационарных матриц штрафов за точность функционирования
В основе любого способа перераспределения управленческих функций в
процессе функционирования лежат нестационарные методы управления [6],
которые могут быть получены не только за счет использования нестацио-
нарных моделей состояния, но и за счет использования переменных матриц
штрафов за неточность функционирования, связанных с законами изменения
тех или иных координат состояния.
Далее в качестве примера будет рассмотрен один из простейших приемов
синтеза такого управления в рамках представлений (1)-(6).
В простейшем случае постановка задачи синтеза нестационарного управ-
ления может быть сформулирована следующим образом.
Для системы
ϕГ = ωГ, ϕГ(0) = ϕГ0;
2Д
1
(19)
ωГ = -
ωГ -
jГ + ξω, ωГ(0) = ωГ0,
Д
Д
предназначенной для отработки требуемых значений направления поле-
та ϕГТ и угловой скорости ωГТ, необходимо сформировать сигнал управле-
ния jГ, оптимальный по минимуму функционала
[
]T
q12Д
[
] ∫ t
q11
ϕГТ - ϕГ
Д
ϕГТ - ϕГ
(20)
I =My
+
j2Гkjdt
q21Д
ωГТ - ωГ
ГТ - ωГ
q22
ω
Д
0
79
Поставив в соответствие (19) с (2), (3), а (20) с (6), будем иметь:
]
]
[
]
[ϕ
[ϕГ
0
xТ =ГТ
,
xy =
,
Bу =
;
ωГТ
ωГ
-1/Д
q12Д
q11
Д
(21)
Q=
K=kj, u=jГ.
q21Д
,
q22
Д
Используя (21) в (5), получим:
q12Д
[
]
[
q11
1
1
]
Д
ϕГТ -
ϕГ
jГ =
0
-
;
Д
q21Д
kj
ωГТ - ωГ
q22
Д
(22)
jГ = Kϕq
ϕГТ -
ϕГ) - Kωq(ωГТ - ωГ
);
q21
(23)
Kϕq =
,
ˆД<0;Kωq =q22,
Kωq ≤ Kωmax.
kj Д
Дkj
Анализ полученного соотношения позволяет сделать следующие заключе-
ния:
сигнал управления характеризует нестационарную систему с обратными
связями по углу и угловой скорости;
сигнал управления определяется взвешенными ошибками управления,
которые обусловлены несоответствием текущих значений ϕГ и ωГ требуемым
ϕГТ и ωГТ.
При этом на больших расстояниях, когда ωГ ≈ 0 иq22kjД≈0,основнойвклад
в управление вносит первое слагаемое, обеспечивая устранение ошибок по уг-
ловым координатам. По мере уменьшения дальности возрастает вклад второ-
го слагаемого, обеспечивая плавный переход к превалирующему управлению
по угловой скорости, реализующему те или иные режимы (минимизацию ли-
нейного промаха (11), обеспечение требуемого линейного разрешения по уг-
ловым координатам [5, 17] и т.д.);
- веса ошибок управления зависят от соотношения коэффициентов штра-
фов q21/kj и q22/kj и условий применения (Д и
Д). При этом манипулируя
их величинами, можно изменять моменты перехода от управления по углу к
управлению по угловой скорости, переходя к другим режимам работы систе-
мы управления либо ее информационных систем;
- в зависимости от требуемых законов изменения ϕГТ и ωГТ могут быть
получены системы самого различного назначения, реализующие самые раз-
нообразные траектории полета: от высокоточных систем наведения при
ϕГТ =ДωГKДV иωГТ=0[8]дотраекторийполета,реализующихсинтезирование
апертуры антенны [5, 7] при
ΔFλ
(24)
ωГТ =
,
2ΔlT
80
где KДV - коэффициент, зависящий от скорости сближения, ΔF - полоса
пропускания доплеровского фильтра, λ - длина волны, ΔlT - требуемое ли-
нейное разрешение по азимуту;
требования неотрицательно определенной матрицы Q [8] накладывают
определенные ограничения на выбор коэффициентов q11, q22 и q12 = q21, обес-
печивающих функционирование системы в заданном диапазоне изменения
дальности и скорости сближения;
для реализации (22), (23) бортовая радиолокационная система должна
формировать типовой набор оценок дальности, скорости сближения, углов и
угловой скорости линии визирования.
Анализ законов, рассмотренных в разделах 2-4, показывает, что, несмотря
на различные приемы обеспечения нестационарности, они приводят к оди-
наковым алгоритмам траекторного управления, в которых в качестве пере-
ключателя приоритетов используется дальность. В то же время возможны и
другие варианты законов управления со сменой приоритетов управления.
В заключение необходимо отметить, что, используя более сложные моде-
ли состояния и функционалы качества с нестационарными коэффициентами
матриц штрафов не только за неточность функционирования, но и за величи-
ну сигналов управления, можно получить более сложные законы управления
с неоднократной сменой управленческих приоритетов, что особенно актуаль-
но при решении многокритериальных задач управления [18-20].
5. Перераспределение приоритетов управления при учете несоответствия
динамических свойств цели и перехватчика
Несоответствие динамических свойств перехватчика и цели является типо-
вым проявлением боестолкновений. При этом под динамическими свойствами
понимаются не только инерционность систем управления и летательных ап-
паратов, но и динамика изменения координат состояния, определяемая усло-
виями боя [21]. В связи с этим весьма востребованными являются методы
наведения, в которых это несоответствие учитывается автоматически. Сле-
дует подчеркнуть, что задача учета этого несоответствия может быть решена
различными способами [22, 23].
Далее будет рассмотрен один из самых простых способов учета несоответ-
ствия динамических свойств цели и перехватчика при использовании локаль-
ной оптимизации на основе представлений (1)-(6) [23].
В общем случае несоответствие динамических свойств системы (3), пред-
назначенной для отработки процесса (2), определяется величиной детерми-
нированной ошибки.
Δ ˙x = ˙xТ - ˙xу = FТxТ - Fуxу - Bуu + FуxТ - FуxТ;
(25)
Δ ˙x = Fу[xТ - xу] - Bуu + [FТ - Fу]xТ; xТ(0) = xТ0, xу(0) = xу0.
Анализ (25) дает возможность сделать следующие заключения.
81
Если динамические свойства системы (3) адекватны аналогичным свой-
ствам (2), т.е. Fу = FТ, то при u = 0 система (25) самостоятельно отрабаты-
вает первоначальные ошибки Δx0.
Если Fу = FТ, то в (25) появляются вынужденные составляющие ошибки,
которые могут быть компенсированы соответствующим выбором управления.
В [23] получено правило, которое позволяет для системы (2), (3), (25) сфор-
мировать сигнал управления
{
}
(26)
u=K-1BT
у
Q(xТ - xу) - G(FТ - Fу)xТ ,
оптимальный по минимуму функционала
(27) I = M
[xТ - xу]TQ[xТ - xу] + 2[xТ - xу]TG[FТ - Fу]xТ +
∫t
+ {[FТ - Fу]xТ}TQ[FТ - Fу]xТ + uTKudt
,
0
в котором Q и K - матрицы штрафов за неточность функционирования и
величины сигналов управления, G - матрица, учитывающая влияние несоот-
ветствия динамических свойств цели и перехватчика, а xТ и xу - оптимальные
оценки процессов (2) и (3).
В математическом плане задачу можно сформулировать следующим об-
разом. Для перехватчика, моделируемого системой уравнений
ϕП = ωП,
ϕП(0) = ϕП0;
1
b
(28)
ωП = -
ωП +
jП + ξП, ωП(0) = ωП0,
T
T
предназначенного для перехвата в горизонтальной плоскости цели, модели-
руемой системой
ϕЦ = ωЦ,
ϕЦ(0) = ϕЦ0;
2Д
1
(29)
ωЦ = -
ωЦ +
(jЦ - jП) + ξЦ, ωЦ(0) = ωЦ0,
Д
Д
необходимо при наличии соответствующих измерений сформировать управ-
ляющий сигнал поперечного ускорения jП, оптимальный по минимуму функ-
ционала (27).
Здесь: ϕП - угол направления полета перехватчика; ωП - угловая скорость
его изменения; T - постоянная времени маневра; b - коэффициент передачи
сигнала управления; ϕЦ, ωЦ и jЦ - соответственно угол линии визирования
Д
цели, ее угловая скорость и поперечное ускорение цели; Д и
- дальность
82
Z
VЦ
OЦ
VП
jЦ
jП
jЦ
OП
X
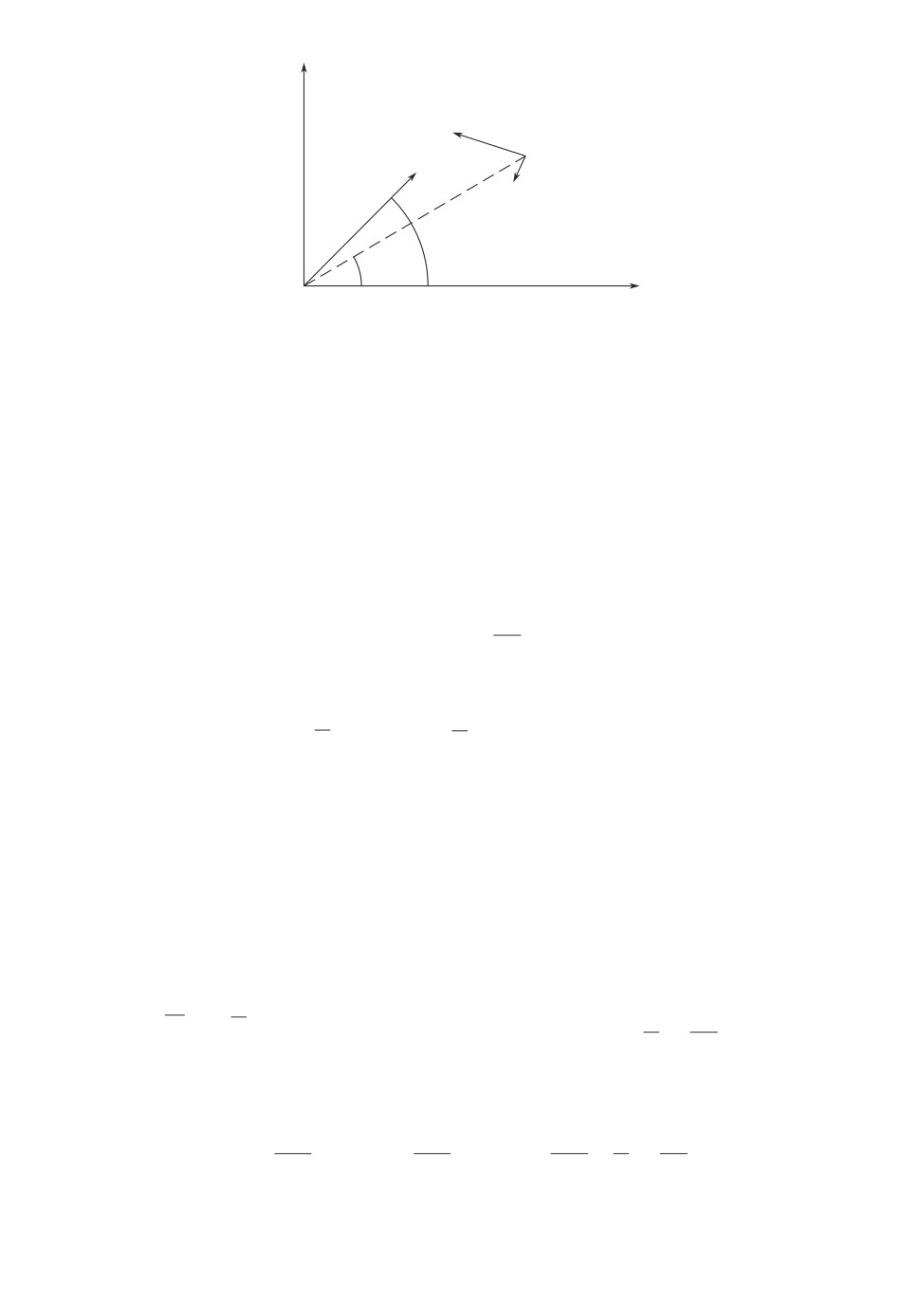
Рис. 3. Геометрия взаимного расположения цели и перехватчика.
до цели и скорость ее изменения; ξП и ξЦ - центрированные гауссовские воз-
мущения с известными интенсивностями.
Геометрические соотношения перехватчика и цели показаны на рис. 3, на
котором OЦ и OП - точки расположения цели и перехватчика, а VЦ и VП -
векторы их скорости.
Поставив в соответствие (28), (29) с (3), (2), получим
]
0
1
[ϕ
[ϕП]
xТ =Ц
,
FТ =
2Д,xy =
;
ωЦ
0
-
ωП
Д
0
1
0
[ξЦ]
(30)
Fу =
1
,Bу = b
,u=jП, ξx =
0
-
ξП
T
T
Рассматривая матрицы Q, G и К в (27) в приложении к (28), (29), будем
иметь:
]
]
[q
11
q12
[g11 g12
(31)
Q=
;
G=
;
K=kj.
q21
q22
g21
g22
Используя (30)-(31) в (26), получим:
0
[
]
]
]
[q11 q12
]
[g11 g12
(
)
1
b
ϕЦ - ϕП
jП =
0
+
1
2Д
;
kj
T
q21
q22
ωЦ - ωП
g21
g22
-
ωЦ
T
Д
(32)
jП = Kϕs
ϕЦ -
ϕП) + Kωs(ωЦ - ωП) + Ksу ωЦ;
(
)
Д
bq21
bq22
bg22
1
2
(33)
Kϕs =
,
Kωs =
,
Ksу =
-
kjT
kjT
kjT
T
Д
Анализ (32), (33) позволяет сделать следующие выводы.
83
На больших расстояниях, когда ωЦ → 0, метод вырождается в стационар-
ную разновидность пропорционально-дифференциального метода со всеми
особенностями его применения [8]. При этом перераспределение управления
от устранения угловых ошибок к линейным промахам определяется соотно-
шением штрафов q21 к q22.
Добиться постоянного согласования динамических свойств перехватчика
и цели в течение всего процесса наведения не удается, поскольку T ≈ const, а
Д иД изменяются в процессе наведения. В связи с этим всегда будет иметь
место текущая вынужденная составляющая ошибок Δϕ и Δω.
Специфической особенностью метода является резкое нарастание роли
третьего слагаемого на малых дальностях, что позволяет существенно по-
высить конечную точность наведения [23].
6. Заключение
В обзоре на качественном уровне рассмотрены варианты методов наведе-
ния на воздушные объекты различных типов, позволяющие автоматически
изменять управленческие приоритеты в процессе самонаведения, обеспечивая
его более высокую адекватность современным условиям воздушного проти-
воборства.
Использование рассмотренных вариантов позволяет оптимизировать си-
стемы наведения в классе широко распространенных двухкритериальных за-
дач, когда система должна быть одновременно наилучшей по различным, за-
частую противоречащим друг другу критериям. Кроме того, комбинирован-
ное использование всех четырех подходов позволяет оптимизировать системы
и для трехкритериальных задач. При этом в зависимости от используемых
моделей и функционалов качества можно получить большой набор методов
наведения, адаптированных под решение различных задач.
В целом можно утверждать, что использование рассмотренных выше прие-
мов изменения приоритетов управления позволит расширить области приме-
нения летательных аппаратов различного назначения, не требуя усложнения
информационного обеспечения.
СПИСОК ЛИТЕРАТУРЫ
1. Попов И.М., Хамзатов М.И. Война будущего. Концептуальные основы и прак-
тические выводы. М.: Кучково поле, 2017, 832 с.
2. Федосов Е.А. Реализация сетецентрической технологии ведения боевых дей-
ствий потребует создания БРЛС нового поколения // Фазатрон. 2007. № 1,2.
С. 11-44.
3. Верба В.С. Авиационные комплексы радиолокационного дозора и наведения.
Принципы построения, проблемы разработки и особенности функционирования.
М.: Радиотехника, 2014, 528 с.
4. Авиация ВВС России и научно-технический прогресс. Боевые комплексы и си-
стемы вчера, сегодня, завтра / под. ред. Е.А. Федосова. М.: Дрофа, 2005, 734 с.
5. Верба В.С., Загребельный И.Р., Меркулов В.И. Метод наведения на воздушную
цель в составе плотной группы // Радиотехника и электроника. 2020. № 11.
С. 1091-1100.
84
6.
Меркулов В.И. Нестационарные методы самонаведения // Вестник воздушно-
космической обороны. 2020. № 1. С. 25-39.
7.
Меркулов В.И., Забелин Н.В. Разработка алгоритмов траекторного управления
носителем, обеспечивающих разрешение воздушных целей в плотной группе //
Радиотехника. 2012. № 10. С. 107-111.
8.
Авиационные системы радиоуправления: учебник для военных и гражданских
ВУЗов / Под ред. В.И. Меркулова. М.: Изд-во ВВИА им. проф. Н.Е. Жуков-
ского, 2008, 423 с.
9.
Меркулов В.И. Адаптация алгоритмов траекторного управления самолетом к
режимам работы бортовой РЛС // Информационно-измерительные и управляю-
щие системы. 2010. № 9. С. 23-26.
10.
Paul Zarchan. Tactical and Strategic Missile Guidance. Sixth Edition, 2012.
11.
John H. Blakelock. Automatic Control of Aircraft and Missiles. Second Edition, 1991.
12.
Shneydor N.A. Missile Guidance And Pursuit Kinematics, Dynamics and Control,
1998.
13.
George M. Siouris. Missile Guidance and Control Systems, New York: Springer, 2004.
14.
Rafael Yanushevsky. Modern Missile Guidance, CRC Press, 2008.
15.
Верба В.С., Капустян С.Г., Меркулов В.И., Харьков В.И. Оптимизация радио-
электронных систем управления ч. 2. Прикладные методы и алгоритмы теории
оптимального управления // Информационно-измерительные и управляющие
системы. 2013. № 3. С. 3-21.
16.
Крутько П.Д., Максимов А.И., Скворцов Л.М. Алгоритмы и программы про-
ектирования автоматических систем. М.: Радио и связь, 1988.
17.
Верба В.С., Меркулов В.И., Садовский П.А. Алгоритм индивидуального на-
ведения на воздушную цель в составе плотной группы // Информационно-
измерительные и управляющие системы. 2009. Т. 7. № 9. С. 3-7.
18.
Kaissa M. Miettinen. Nonlinear Multiobjective Optimization. 1999, 298 p.
19.
Matthias Ehrgott. Multicriteria Optimization, Second Edition, Springer, 2005, 323 p.
20.
Oscar Brito Augusto, Fouad Bennis, Stephane Caro. Multiobjective Optimization
Involving Quadratic Functions // J. Optim. Vol. 2014, Article ID 406092, 11 p.
21.
Меркулов В.И. Учет динамичности летательных аппаратов при синтезе алгорит-
мов, сопровождения бортовыми РЛС // Успехи современной радиоэлектроники.
2012. № 8. С. 68-74.
22.
Меркулов В.И., Соколов Д.А. Учет несоответствия динамических свойств под-
систем при их совместном функционировании // АиТ. 2017. № 5. С. 3-15.
Merkulov V.I., Sokolov D.A. Account Of The Mismatch Between The Dynamic
Properties Of Jointly Operating Systems // Autom. Remote Control. 2017. No. 5.
P. 771-781.
23.
Информационно-измерительные и управляющие радиоэлектронные системы и
комплексы / Под ред. В.С. Вербы. М.: Радиотехника. 2020, 490 с.
Статья представлена к публикации членом редколлегии Р.А. Мунасыповым.
Поступила в редакцию 08.12.2020
После доработки 22.04.2021
Принята к публикации 29.04.2021
85