Автоматика и телемеханика, № 9, 2021
Стохастические системы
© 2021 г. В.И. ВОРОТНИКОВ, д-р физ.-мат. наук (vorotnikov-vi@rambler.ru)
(Сочинский институт Российского университета дружбы народов),
Ю.Г. МАРТЫШЕНКО, канд. физ.-мат. наук (j-mart@mail.ru)
(Российский государственный университет нефти и газа, Москва)
К ЗАДАЧЕ ЧАСТИЧНОЙ УСТОЙЧИВОСТИ НЕЛИНЕЙНЫХ
ДИСКРЕТНЫХ СТОХАСТИЧЕСКИХ СИСТЕМ
Рассматривается система нелинейных дискретных уравнений, подвер-
женных воздействию дискретного случайного процесса типа “белого” шу-
ма. Предполагается, что система допускает “частичное” (по некоторой ча-
сти переменных состояния) нулевое положение равновесия. Ставится за-
дача частичной устойчивости по вероятности: устойчивости данного по-
ложения равновесия не по всем, а только по отношению к части опре-
деляющих его переменных. Для решения применяется дискретно-стоха-
стический вариант метода функций Ляпунова при соответствующей кон-
кретизации требований к функции Ляпунова. С целью расширения воз-
можностей используемого метода предлагается проводить корректировку
области, в которой строится вспомогательная функция Ляпунова; это до-
стигается посредством введения дополнительной (векторной, вообще го-
воря) вспомогательной функции. Получены условия частичной устойчи-
вости и асимптотической устойчивости по вероятности указанного вида.
Приводится пример, показывающий особенности предложенного подхода.
Ключевые слова: система нелинейных дискретных (конечно-разностных)
стохастических уравнений, частичная устойчивость, метод функций Ля-
пунова.
DOI: 10.31857/S000523102109004X
1. Введение
Задачи устойчивости относятся к основным задачам качественного анали-
за и синтеза нелинейных динамических систем, подверженных воздействию
случайных возмущений и изменениям структуры. Как и в случае детермини-
рованных систем, для их решения используется метод функций Ляпунова.
Существенное влияние на развитие стохастического варианта метода
функций Ляпунова оказала идея И.Я. Каца и Н.Н. Красовского [1] использо-
вания усредненной производной функции Ляпунова, для вычисления которой
достаточно знать лишь правые части системы и вероятностные характеристи-
ки воздействующего на систему случайного процесса. Данный подход, пред-
ложенный для систем дифференциальных уравнений, правая часть которых
содержит однородную марковскую цепь с конечным числом состояний, в зна-
чительной степени предопределил многие последующие исследования: систем
116
стохастических дифференциальных уравнений в форме Ито [2, 3], а также
более общих классов стохастических систем со случайными параметрами и
(или) структурой [4, 5].
Отдельное направление исследований связано с анализом устойчивости
дискретных (конечно-разностных) систем, подверженных воздействию слу-
чайных факторов. Повышенный интерес к дискретным системам связан с
использованием цифровых систем управления, проблемами финансовой ма-
тематики, динамики биоценозов, а также с задачами численного решения
систем стохастических дифференциальных уравнений. На этом пути разра-
ботан [2, 6-13] соответствующий дискретно-стохастический вариант метода
функций Ляпунова применительно к обладающей большой общностью за-
даче устойчивости по отношению ко всем переменным нулевого положения
равновесия. Рассмотрена также [14] задача устойчивости компактных мно-
жеств в фазовом пространстве системы. Усредненная производная (или диф-
ференциальный производящий оператор [2, 3, 5]) заменяется в данных слу-
чаях усредненной конечной разностью функции Ляпунова [6].
Начиная с публикаций В.В. Румянцева [15, 16] в теории устойчивости де-
терминированных систем, а затем и стохастических систем с непрерывной ди-
намикой рассматриваются задачи частичной устойчивости (см. обзор [17]):
устойчивости по отношению к части переменных нулевого положения рав-
новесия, а также устойчивости по всем и по части переменных “частично-
го” (нулевого) положения равновесия. С формально-математической точки
зрения задача устойчивости по всем переменным “частичного” положения
равновесия относится к задаче устойчивости некомпактных (замкнутых, но
неограниченных) множеств, в то время как задачи устойчивости по части пе-
ременных имеют самостоятельное значение и не сводятся, вообще говоря, к
каким-либо задачам устойчивости множеств. Дело в том, что устойчивость
по отношению к части переменных не предполагает близости траекторий, со-
ответствующих возмущенным движениям и невозмущенному движению (по-
ложению равновесия) системы.
Содержательно указанные задачи частичной устойчивости естественным
образом возникают в приложениях как исходя из требования нормального
функционирования, так и при оценке возможностей проектируемой системы.
Они также могут рассматриваться и как вспомогательные задачи при анализе
устойчивости по всем переменным выделенных положений равновесия. Кро-
ме того, возникают соответствующие задачи частичной стабилизации нели-
нейных управляемых систем, активно рассматриваемые в последние годы.
Однако для систем стохастических дискретных уравнений задачи частичной
устойчивости и стабилизации практически не изучались.
В данной статье рассматривается система нелинейных дискретных (ко-
нечно-разностных) уравнений общего вида, подверженных воздействию дис-
кретного случайного процесса типа “белого” шума. Предполагается, что си-
стема допускает “частичное” (по некоторой части переменных состояния)
нулевое положение равновесия. Дается постановка задачи устойчивости по
вероятности этого положения равновесия; устойчивость рассматривается по
117
отношению к части определяющих его фазовых переменных. Анализируется
возможность решения поставленной задачи на основе метода функций Ляпу-
нова.
2. Определения. Постановка задачи
Рассмотрим линейное конечномерное пространство векторов x с евклидо-
вой нормой ∥x∥. Введем разбиение вектора x на две части: x = (yT, zT)T
(T обозначает транспонирование). Обозначим через Z+ = {k = 0, 1, 2, . . . }
множество целых неотрицательных чисел.
Пусть дана конечномерная нелинейная система стохастических дискрет-
ных (конечно-разностных) уравнений [2, 6-14]
x(k + 1) = X(k, x(k), ξ(k)),
в которой: k ∈ Z+ - дискретное время; x(k) - последовательность значений
фазового вектора, определяющих состояние системы; ξ(k) - последователь-
ность независимых случайных векторов, заданных на вероятностном про-
странстве (Ω, F , P), с одинаковыми законами распределения для каждого
k ∈ Z+. Здесь Ω - пространство элементарных событий {ω} с заданными на
нем σ-алгеброй F измеримых множеств с фильтрацией Fk и вероятностной
мерой P: F → [0, 1].
С учетом сделанного разбиения x = (yT,zT)T представим рассматривае-
мую систему в виде двух групп уравнений
(1)
y(k + 1) = Y(k, y(k), z(k), ξ(k)), z(k + 1) = Z(k, y(k), z(k), ξ(k)).
Если имеет место условие
Y(k, 0, z(k), ξ(k)) ≡ 0,
то множество M = {x(k) : y(k) = 0} является “частичным” положением рав-
новесия системы (1).
Допустим также, что вектор-функция X = (YT, ZT)T, определяющая пра-
вую часть системы (1), при каждом k ∈ Z+ непрерывна по x, ξ в обла-
сти ∥x∥ < ∞. Начальное значение x0 фазового вектора будем считать де-
терминированным. Тогда (см., например, [9, 11]) для всех k0 ≥ 0, x0 су-
ществует единственный случайный многомерный марковский процесс, со-
гласованный с потоком σ-алгебр Fk и являющийся в пространстве {x, ξ}
случайной вектор-функцией {x(k) = x(k; k0, x0), ξ(k)}, реализации {x(k, ω) =
= x(k, ω; k0, x0), ξ(k, ω)} которой удовлетворяют системе (1). Данный случай-
ный процесс и соответствующий ему набор реализаций случайной вектор-
функции при всех k ≥ k0 определяют решение системы (1), удовлетворяю-
щее начальным условиям x0 = x(k0; k0, x0), а также соответствующий этому
решению набор выборочных траекторий системы (1). Марковское свойство
решений системы (1) используется далее при обосновании условий частич-
ной устойчивости по вероятности.
118
При сделанных предположениях
“частичное” положение равновесия
y(k) = 0 системы (1) является инвариантным множеством этой системы.
Предположение X(k, 0, ξ(k)) ≡ 0 о существовании “полного” положения рав-
новесия x(k) = 0 не является необходимым и даже может противоречить
смыслу решаемых задач.
Следуя подходу теории частичной устойчивости, будем анализировать
устойчивость “частичного” положения равновесия y(k) = 0 не по всем опре-
деляющим его переменным, а только по отношению к их некоторой наперед
заданной части. Для этого предположим, что y = (yT1, y2)T, причем вектор y1
включает те компоненты вектора y, устойчивость по отношению к которым
рассматривается.
В данном случае входящие в вектор z переменные являются “неконтроли-
руемыми”, хотя они существенно влияют на динамику y1-переменных. Для
расширения функциональных возможностей рассматриваемых далее поня-
тий y1-устойчивости “частичного” положения равновесия y(k) = 0 введем
произвольным образом разбиение z = (zT1, zT2)T вектора z на две группы пе-
ременных.
Обозначим через Dδ область значений x0 таких, что ∥y0∥ < δ, ∥z10∥ ≤ L,
∥z20∥ < ∞; область DΔ получается заменой δ на Δ.
Определение. “Частичное” положение равновесия y(k) = 0 систе-
мы (1) при больших значениях z10 в целом по z20 (for a large values of z10
and on the whole with respect to z20):
1) y1-устойчиво по вероятности, если для каждого k0 ∈ Z+ и для любых
сколь угодно малых чисел ε > 0, γ > 0, а также для любого наперед задан-
ного числа L > 0 найдется число δ(ε,γ,L,k0) > 0 такое, что для всех k ≥ k0
и x0 ∈ Dδ имеет место соотношение
{
}
(2)
P sup ||y1(k;k0,x0)|| > ε
< γ;
k≥k0
2) равномерно y1-устойчиво, если δ = δ(ε, γ, L);
3) асимптотически y1-устойчиво, если оно равномерно y1-устойчиво по
вероятности и, кроме того, для каждого k0 ∈ Z+ и для любого наперед за-
данного числа L > 0 найдется число Δ(L) > 0 такое, что для всех k ≥ k0 и
x0 ∈ DΔ имеет место предельное соотношение
{
}
lim
P lim
||y1(k; k0, x0)|| = 0
= 1.
||y0||→0
k→+∞
Замечание 1. Можно показать (см., например, [5]), что если x0 - слу-
чайная величина (не зависящая от ξ(k)), а включения x0 ∈ Dδ и x0 ∈ DΔ
выполняются почти наверное (с вероятностью единица), то получаем опре-
деления, эквивалентные введенным определениям частичной устойчивости.
Замечание 2. Наиболее близкими к введенным являются понятия ча-
стичной устойчивости: по всем [18, 19] и по отношению к части перемен-
119
ных [20] “частичного” положения равновесия стохастических систем диффе-
ренциальных уравнений в форме Ито. Предположения “в целом по z0” или
“при больших значениях z0” характерны для определений устойчивости (как
по всем, так и по части переменных) “частичного” положения равновесия
y(k) = 0 системы (1), но приводят к различным требованиям к функциям
Ляпунова. За счет разделения вектора z0 на две части возникают “проме-
жуточные” понятия y1-устойчивости в смысле введенных определений 1-3.
При этом надлежащий выбор разбиения z = (zT1, zT2)T зависит от структуры
системы (1) и является результатом поиска компромисса между содержатель-
ным смыслом понятия y1-устойчивости “частичного” положения равновесия
y(k) = 0 и соответствующими требованиями к функциям Ляпунова. Кроме
того, введенные понятия устойчивости возникают при переходе (посредством
обозначений w = k, r = k - k0) от системы (1) к стационарной дискретной
системе
x(r + 1) = X(x(r), w(r), ξ(r)), w(r + 1) = w(r) + 1,
когда требования равномерности (неравномерности) по k0 в задачах y1-устой-
чивости при больших значениях z0 или в целом по z0 “частичного” положения
равновесия y(k) = 0 заменяются требованиями “в целом по w0” (“при боль-
ших значениях w0”).
3. Условия частичной устойчивости
В контексте метода функций Ляпунова будем рассматривать однознач-
ные непрерывные по x при каждом k ∈ Z+ скалярные функции V = V (k, x),
V (k, 0) ≡ 0, определенные в области
(3)
∥y1∥ < h,
∥y2
∥ + ∥z∥ < ∞.
Аналогом производных этих функций в силу исследуемой системы (1) яв-
ляются их усредненные разности (приращения), вычисляемые по формуле
[6, 9]
LV (k,x) = E[V (k + 1,X(k,x(k),ξ(k)))|x(k) = x] - V (k,x),
где оператор E[V (k + 1, X(k, x(k), ξ(k)))|x(k) = x] определяет условное
математическое ожидание при x(k) = x случайной величины V (k + 1,
X(k, x(k)ξ(k))), порожденной набором реализаций {x(k, ω), ξ(k, ω)} процес-
са {x(k), ξ(k)}, являющегося решением системы (1).
Также для формулировки условий частичной устойчивости дополнительно
будут использоваться следующие вспомогательные функции.
1) Скалярные функции V∗(k, y, z1), V∗(y, z1), необходимые для конкрети-
зации (в соответствии с постановкой задачи) требований к V -функции Ляпу-
нова, и вспомогательная векторная функция µ(k, x), µ(k, 0) ≡ 0, посредством
которой корректируется область, где строится основная V -функция Ляпуно-
ва. Эти функции при каждом k ∈ Z+ непрерывны по x в области (3).
120
2) Непрерывные монотонно возрастающие по r > 0 скалярные функции
ai(r), ai(0) = 0 (i = 1,2,3) (функции типа Хана [16]), определяющие стан-
дартные требования к основной V -функции Ляпунова.
Введение, наряду с основной V -функцией Ляпунова, дополнительной вспо-
могательной µ(k, x)-функции мотивируется следующим обстоятельством.
При исследовании y1-устойчивости по вероятности “частичного” положения
равновесия y(k) = 0 системы (1) в общем случае имеет место зависимость
V -функций Ляпунова не только от k, y1, но и от y2, z. В такой ситуации
анализ поставленной задачи y1-устойчивости в обычно рассматриваемой об-
ласти
(4)
∥y1∥ < h1 < h,
∥y2
∥ + ∥z∥ < ∞
не всегда дает возможность выявить желаемые свойства V -функции Ляпуно-
ва или наделить ее этими свойствами. Причина в требовании ∥y2∥ + ∥z∥ < ∞,
которое существенно затрудняет возможность получения необходимых оце-
нок для V -функции Ляпунова и ее усредненной конечной разности.
Указанное требование представляет, по сути, расчет на “наихудший” слу-
чай изменения переменных y2, z, и его можно заменить более “мягким” тре-
бованием
(5)
∥y1∥ + ∥µ(k, x)∥ < h1 < h,
∥y2
∥ + ∥z∥ < ∞,
если иметь в виду “расширенную” (y1, µ)-устойчивость “частичного” положе-
ния равновесия y = 0 системы (1). В данном случае µ-функция не являет-
ся изначально заданной и подбирается в процессе решения исходной задачи
y1-устойчивости, причем расширение понятия y1-устойчивости может проис-
ходить за счет зависимости µ-функции не только от k, y, но и от z.
Поэтому выбор подходящей V -функции Ляпунова не только возможно,
но и целесообразно согласовывать с выбором области (k, x)-пространства, в
которой эта функция рассматривается. Указанного согласования можно до-
биться введением, наряду с основной V -функцией Ляпунова, дополнительной
(векторной, вообще говоря) вспомогательной µ(k, x)-функции для корректи-
ровки области, в которой строится основная V -функция Ляпунова.
Теорема 1. Пусть для системы (1), наряду с основной скалярной
V -функцией Ляпунова, можно указать дополнительную векторную функ-
цию µ(k, x), µ(k, 0) ≡ 0, для которых при каждом k ∈ Z+ и достаточно ма-
лом h1 > 0 в области (5) выполняются условия:
(6)
V (k, x) ≥ a1(∥y1
∥ + ∥µ(k,x)∥),
(7)
V (k, x) ≤ V ∗(k, y, z1), V ∗(k, 0, z1
) ≡ 0,
(8)
LV (k,x) = E[V (k + 1,X(k,x(k),ξ(k))|x(k) = x] - V (k,x) ≤ 0.
Тогда “частичное” положение равновесия y(k) = 0 системы (1) y1-устой-
чиво по вероятности при больших значениях z10 в целом по z20.
121
Если условия (7) заменить условиями
(9)
V (k, x) ≤ V ∗(y, z1), V ∗(0, z1
) ≡ 0,
то “частичное” положение равновесия y(k) = 0 системы (1) равномерно
y1-устойчиво по вероятности при больших значениях z10 в целом по z20.
Доказательства теоремы 1 и последующей теоремы 2 вынесены в Прило-
жение.
В рамках рассматриваемого подхода можно сформулировать также и усло-
вия асимптотической y1-устойчивости по вероятности при больших значе-
ниях z10 в целом по z20 “частичного” положения равновесия y(k) = 0 систе-
мы (1). Приведем один из вариантов таких условий.
Теорема 2. Пусть для системы (1), наряду с основной скалярной
V -функцией Ляпунова, можно указать дополнительную векторную функ-
цию µ(x), µ(0) ≡ 0, для которых при каждом k ∈ Z+ и достаточно малом
h1 > 0 в области (5) выполняются условия:
(10)
a1(∥y1∥ + ∥µ(x)∥) ≤ V (k,x) ≤ a2(∥y1
∥ + ∥µ(x)∥),
(11)
LV (k,x) ≤ -a3(∥y1
∥ + ∥µ(x)∥),
а также условия (9).
Тогда “частичное” положение равновесия y(k) = 0 системы (1) асимпто-
тически y1-устойчиво по вероятности при больших значениях z10 в целом
по z20.
Замечание 3. Вспомогательная V -функция Ляпунова и ее усредненная
разность (приращение) LV (k, x) в силу системы (1) в теоремах 1, 2 при каж-
дом k ∈ Z+ являются, вообще говоря, знакопеременными функциями в обла-
сти (4). Наряду с основной V -функцией Ляпунова дополнительная вспомога-
тельная µ-функция вводится для наиболее рациональной замены области (4)
областью (5).
Условия (7) являются “промежуточными” между менее ограничитель-
ным условием V (k, 0, z) ≡ 0 и более ограничительными условиями V (k, x) ≤
≤ V ∗(k,y), V ∗(k,0) ≡ 0, при выполнении которых “частичное” положение
равновесия y(k) = 0 системы (1) соответственно y1-устойчиво по вероятности
при больших значениях z0 или y1-устойчиво по вероятности в целом по z0.
Замечание 4. В рамках предложенного подхода нелинейные V -функции
Ляпунова могут быть построены как знакоопределенные квадратичные фор-
мы (или формы более высокого порядка) V (k, x) ≡ V∗(k, y1, µ(k, x)) пере-
менных y1, µ. При этом выбор µ-функций должен быть согласован с усло-
виями (7), (9): допустимы, например, вспомогательные µ-функции вида µ =
= µ(y2, z1), µ(0, z1) ≡ 0.
Eсли от исходной системы (1) можно отделить подсистему вида
(
)
y1(k + 1) = Y1 k,y1(k),µ(k),ξ(k) ,
(
)
µ(k + 1) = Y∗1 k, y1(k), µ(k), ξ(k) ,
122
то построение V -функции Ляпунова можно провести, используя числен-
ный метод [11] применительно к задаче устойчивости по всем переменным
(по y1, µ) нулевого положения равновесия этой подсистемы.
Замечание 5. Если система (1) допускает “полное” положение равнове-
сия x(k) = 0, то в случае µ(k, x) ≡ 0, ξ(k) ≡ 0, ∥x0∥ < δ при выполнении усло-
вий (6), (8) имеем дискретный вариант классической теоремы В.В. Румянцева
[15] об устойчивости по отношению к части переменных. В случае ξ(k) ≡ 0
теорема 1 переходит в дискретные варианты [21, 22] соответствующих теорем
из [23, 24].
Замечание 6. Устойчивость по части переменных “в среднем” нулевого
положения равновесия систем дискретных стохастических уравнений изуча-
лась в [25, 26] на основе выделения “усеченных” подсистем [25], а также путем
построения вспомогательных систем [26]. Возможности использования мето-
да функций Ляпунова анализировались для решения задач частичной устой-
чивости (стабилизации) систем стохастических дифференциальных уравне-
ний [27-31], в том числе для систем со случайной структурой [32-34]; для
квазилинейных систем стохастических дифференциальных уравнений на мо-
дельном примере дано сравнение задач оптимальной стабилизации по всем и
по части переменных [35].
4. Пример
Пусть дискретная система (1) состоит из уравнений
y1(k + 1) = [a + αξ1(k)]y1(k) + ly2(k)z1(k),
(12)
y2(k + 1) = [b + dy1(k)]y2
(k),
z1(k + 1) = [c + ey1(k)]z1(k), z2(k + 1) = Z2(k,x(k)),
где ξ1(k) - последовательность независимых случайных величин c одинако-
вым стандартным нормальным распределением при каждом k ∈ Z+; функ-
ция Z2 произвольна и удовлетворяет только общим требованиям к систе-
ме (1); a, b, c, d, e, l, α - постоянные параметры.
Система (12) допускает “частичное” положение равновесия
(13)
y1(k) = y2
(k) = 0.
Наряду с основной функцией Ляпунова
(14)
V (x) = y21 + 2y22z21
также рассмотрим вспомогательную функцию µ1 = y2z1.
Для V -функции Ляпунова в области (5) выполняются условия (9) и (10),
а ее усредненная разность (приращение) LV (x) в силу системы (12) при всех
123
k ∈ Z+ определяется следующим образом:
[(
)2
LV (x) = E ay1(k) + ly2(k)z1(k) + αy1(k)ξ1(k)
+
]
+ 2y22(k)z21(k)(b + dy1(k))2(c + ey1(k))2|x(k) = x - y21 - 2y22z21 =
= a2y21 + 2aly1y2z1 + l2y22z21 + α2y21 + 2b2c2y22z21 +
+ r1y1y22z21 + r2y21y22z21 + r3y31y22z21 + 2d2e2y41y22z21 - y21 - 2y22z21 =
= (a2 + α2 - 1)y21 + 2aly1µ1 + (l2 + 2b2c2 - 2)µ21 + r1y1µ21 +
+ r2y21µ21 + r3y31µ21 + 2d2e2y41µ21,
r1 = bcr0, r2 = 2(b2e2 + 4bcde + c2d2), r3 = der0, r0 = 4(be + cd);
вычисление условного математического ожидания проведено с учетом соот-
ношений E[ξ1(k)] = 0, E[ξ21(k)] = 1, определяющих стандартное нормальное
распределение случайных величин ξ1(k).
При выполнении неравенств
(15)
a2 + α2 < 1, (a2 + α2 - 1)(l2 + 2b2c2 - 2) > a2l2
для каждого k ∈ Z+ при достаточно малом h1 > 0 в области (5) (но не в обла-
сти (4)) при любых значениях параметров d, e имеет место оценка LV (x) ≤
≤ -β(y21 + µ21), β = const > 0. Это значит, что для V -функции Ляпунова (14)
в области (5) помимо условий (9), (10) также выполняется условие (11).
Hа основании теоремы 2 заключаем, что при выполнении условий (15) “ча-
стичное” положение pавновесия (13) системы (12) при больших значениях z10
в целом по z20 асимптотически y1-устойчиво по вероятности.
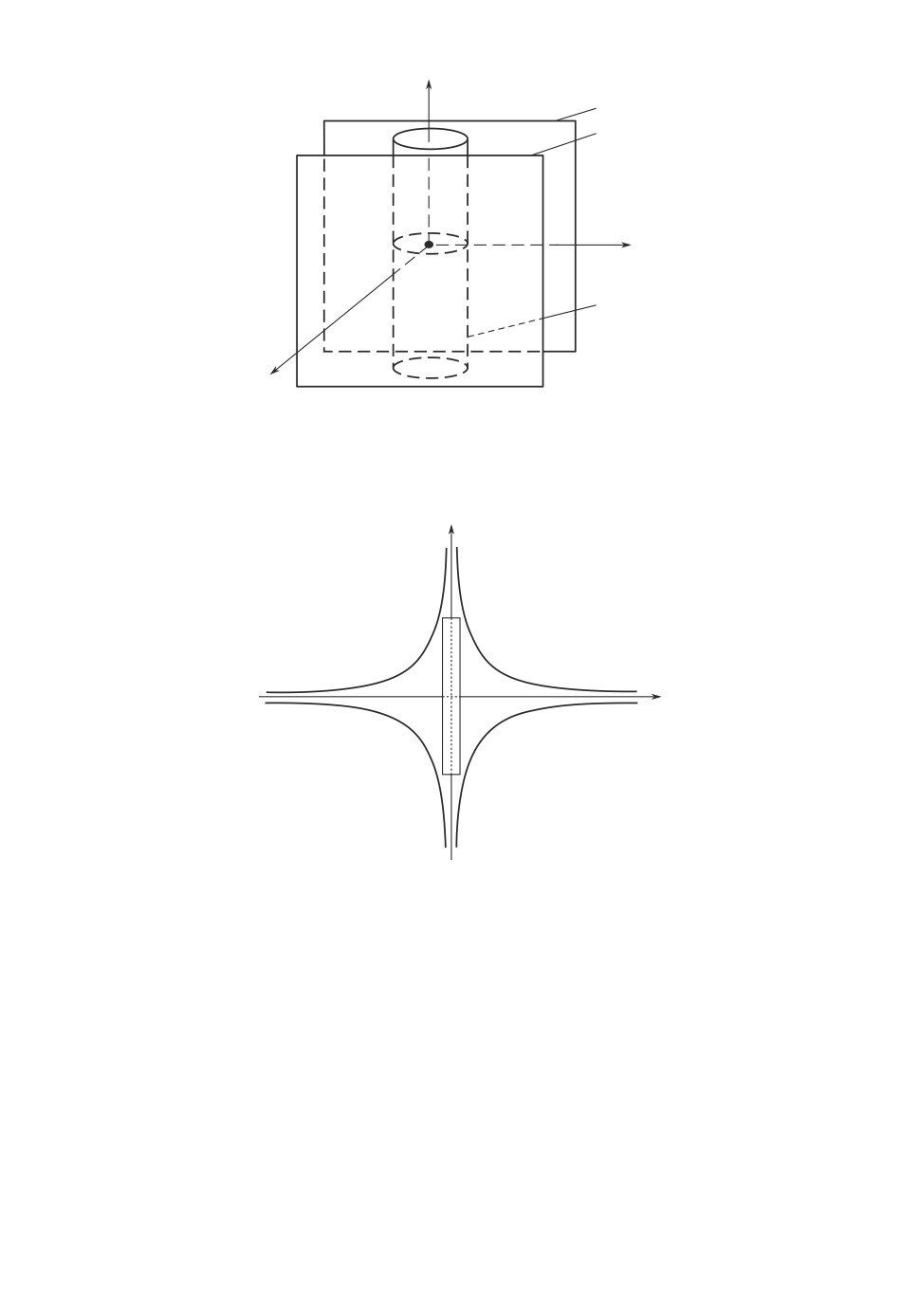
Поясним геометрически данное свойство частичной устойчивости приме-
нительно к введенным в разделе 2 определениям 2, 3. Для каждого k0 ∈ Z+ и
для любых сколь угодно малых чисел ε > 0 (ε < h1), γ > 0, а также для лю-
бого наперед заданного числа L > 0 в трехмерном пространстве Oy1y2z1 гра-
ница допустимой области x0 ∈ Dδ начальных возмущений является цилин-
дром ∥y0∥ = δ высоты 2L, расположенном между двумя плоскостями y1 = ±ε
(рис. 1); при этом δ = δ(ε, γ, L). Если решения системы (12) начинаются при
k = k0 внутри этого δ-цилиндра (при произвольном значении z20), то соот-
ветствующие указанным решениям выборочные траектории в пространстве
Oy1y2z1 будут с вероятностью, не меньшей 1 - γ, оставаться при всех k ≥ k0
между указанными двумя ε-плоскостями.
Также можно указать число Δ = Δ(γ, L, h1) > 0 такое, что
{
}
P sup |y1(k;k0,x0)| ≥ h1
< γ,
k≥k0
(16)
{
}
P lim
y1(k;k0,x0) = 0
≥1-γ
k→+∞
124
z1
y1 = -e
y1 = e
y2
|| y0|| = d
y1
Рис. 1. Области допустимых начальных и текущих отклонений от инвариант-
ного множества y1(k) = y2(k) = 0.
z1
y2
Рис. 2. Области допустимых начальных и текущих отклонений (в проекции
на плоскости Oy2z1.
для всех k ≥ k0 и x0 ∈ DΔ. Если решения системы (12) начинаются при k = k0
внутри Δ-цилиндра ∥y0∥ = Δ высоты 2L (при произвольном значении z20),
то соответствующие этим решениям выборочные траектории в пространстве
Oy1y2z1 будут с вероятностью, не меньшей 1 - γ, не только оставаться при
всех k ≥ k0 между ε-плоскостями, но и при k → ∞ будут сходиться к плоско-
сти y1 = 0.
Однако в рамках рассматриваемого подхода, основанного на перехо-
де от области (4) к области (5), имеет место “расширенная” равномерная
(y1, µ1)-устойчивость “частичного” положения равновесия (13) системы (12),
обеспечивающая правомерность такого перехода. Поэтому δ-цилиндр распо-
125
Таблица
k ξ1(k) y1(k)
y2(k)
z1(k)
ξ1(k)
y1(k)
y2(k)
z1(k)
0
0
0,1
0,1
1
0
0,1
0,1
1
1
0
0,15
0,16
0,4333
-1
0,1167
0,16
0,4333
2
0
0,1443
0,2640
0,2094
1
0,1665
0,2587
0,1950
3
0
0,1275
0,4340
0,1000
1
0,1891
0,4311
0,0975
4
0
0,1072
0,7063
0,0461
0
0,1366
0,7282
0,0509
5
0
0,0861
1,1352
0,0203
-1
0,0599
1,1918
0,0239
6
0
0,0661
1,8005
0,0085
-1
0,0385
1,8590
0,0094
7
0
0,0484
2,8198
0,0034
1
0,0496
2,8601
0,0035
8
0
0,0338
4,3662
0,0013
0
0,0348
4,4320
0,0013
9
0
0,0226
6,6969
0,0005
0
0,0233
6,8022
0,0005
10
0
0,0145
10,197
0,00017
1
0,0227
10,362
0,00017
15
0
0,0009
79,001
7,6 × 10-7
-1
0,0007
82,073
9,1 × 10-7
20
0
0,000048
600,69
3,2 × 10-9
-1
0,000017
623,28
3,7 × 10-9
ложен в области D∗ пространства Oy1y2z1, ограниченной поверхностью y21 +
+y22z21 = ε2. (На рис. 2 расположение δ-цилиндра показано в проекции на
плоскость Oy2z1; соответствующий прямоугольник со сторонами длины 2δ
и 2L находится в области, границами которой являются ветви гипербол y2z1 =
= ±ε.) Если решения системы (12) начинаются при k = k0 внутри δ-цилиндра
(при произвольном значении z20), то соответствующие указанным решениям
выборочные траектории в пространстве Oy1y2z1 будут с вероятностью, не
меньшей 1 - γ, оставаться при всех k ≥ k0 в области D∗.
Анализ структуры системы (12) позволяет дополнить сделанные выво-
ды: при выполнении условий (15) выборочные траектории в пространстве
Oy1y2z1, соответствующие решениям системы (12), начинающимся внут-
ри Δ-цилиндра ∥y0∥ = Δ высоты 2L (при произвольном значении z20), с
вероятностью, не меньшей 1 - γ,
“фокусируются” при k → ∞ или вдоль
оси Oy2, или вдоль оси Oz1. Действительно, в силу имеющей место “рас-
ширенной” асимптотической (y1, µ1)-устойчивости “частичного” положения
равновесия (13) системы (12) второе и третье уравнения этой нелинейной
системы можно представить в виде линейных рекуррентных уравнений
y2 (k + 1) = [b + dy1 (k; k0,x0)]y2(k),
z1 (k + 1) = [c + ey1 (k;k0,x0)]z1(k),
причем для компоненты y1(k; k0, x0) любого решения системы (12), начавше-
гося внутри Δ-цилиндра высоты 2L, выполнены соотношения (16). Поэтому
при выполнении условий (15) для этих решений системы (12) при k → ∞
с вероятностью, не меньшей 1 - γ, имеют место соотношения |y2(k)| → ∞ и
|z1(k)| → 0 (при |b| > 1, |c| < 1) или соотношения |y2(k)| → 0 и |z1(k)| → ∞
(при |b| < 1, |c| > 1).
Для численной конкретизации сделанных выводов в левой части табли-
цы для “невозмущенного” случая ξ1(k) ≡ 0 приводятся результаты вычисле-
126
ний по рекуррентным соотношениям (12) на отрезке k ∈ [0, 20] при y1(0) =
= y2(0) = 0,1 и z1(0) = 1, а также при значениях параметров a = 1/2, b = 3/2,
c = 1/3, d = e = l = 1. При случайном воздействии ξ1(k) выборочные траек-
тории группируются около “невозмущенной” траектории, фокусирующейся
при k → ∞ вдоль оси Oy2. Для оценки влияния случайного воздействия на
динамику системы (12) в правой части таблицы при α = 1/3 и тех же значе-
ниях параметров приводятся результаты вычислений в случае, когда допу-
стимая реализация ξ1(k) на отрезке k ∈ [0, 20] определяется последователь-
ностью {0, -1, 1, 1, 0, -1, -1, 1, 0, 0, 1, 1, -1, 0, 0, -1, 1, 0, -1, 1, -1}.
5. Заключение
Для нелинейной системы стохастических дискретных (конечно-разност-
ных) уравнений, подверженных действию дискретного случайного процесса
типа “белого” шума, дана поставка задачи устойчивости (асимптотической
устойчивости) по части переменных “частичного” нулевого положения рав-
новесия. Начальные значения “неконтролируемых” переменных, не опреде-
ляющих рассматриваемое “частичное” положение равновесия, предполагают-
ся большими (ограниченными по норме любым наперед заданным числом)
по одной их части и произвольными по другой.
Приводятся достаточные условия разрешимости этой задачи в контек-
сте дискретно-стохастического варианта метода функций Ляпунова в со-
ответствующей модификации. Наряду с основной V -функцией Ляпунова
рассматривается дополнительная (векторная, вообще говоря) вспомогатель-
ная µ-функция для корректировки области, в которой строится основная
V -функция Ляпунова. Целесообразность такого подхода заключается в том,
что в результате основная V -функция Ляпунова, а также ее усредненная
разность (приращение) в силу рассматриваемой системы могут быть знако-
переменными.
ПРИЛОЖЕНИЕ
Доказательство теоремы 1. I. Пусть при каждом k ∈ Z+ и доста-
точно малом h1 > 0 в области (5) выполняются условия (6)-(8).
Возьмем произвольное число ε (0 < ε < h1), рассмотрим произвольный мо-
мент времени k0, а также начальную точку x0 из области
{
}
Dε =
∥y0∥ < ε, ∥z10∥ ≤ L, ∥z20∥ < ∞
Рассмотрим случайный процесс x(k; t0, x0) (k ≥ k0), являющийся решени-
ем системы (1), и обозначим через τε “целочисленный” момент первого выхода
этого процесса из области ∥y1∥ ≤ ε. Если некоторые траектории ни за какое
конечное время не выходят из области ∥y1∥ ≤ ε, то для них τε считаем рав-
ным ∞. Положим
τ (k) = min(τε, k); τ(k0) = k0.
127
Имеют место равенства
(
)
V τ(k),x(τ(k);k0,x0)
- V (k0,x0) =
(
)
(
)
= V τ(k),x(τ(k);k0,x0)
- V τ(k - 1),x(τ(k - 1);k0,x0)
+
(
)
(
)
+ V τ(k - 1),x(τ(k - 1);k0,x0)
- V τ(k - 2),x(τ(k - 2);k0,x0)
+
(
)
+ V τ(k0 + 1),x(τ(k0 + 1);k0,x0)
- V (k0,x0) =
∑
(
)
= ΔV τ(s),x(τ(s);k0,x0) ;
s=k0
(
)
ΔV τ(s),x(τ(s);k0,x0)
=
(
)
(
)
= V τ(s + 1),x(τ(s + 1);k0,x0)
- V τ(s),x(τ(s);k0,x0)
Из этих равенств следует, что для последовательности v(k) случай-
ных величин v(k) = V (τ(k), x(τ(k); k0, x0)), порожденных реализациями
{x(k, ω), ξ(k, ω)} случайного процесса
{x(k), ξ(k)}, определяемого систе-
мой (1), имеют место “усредненные” соотношения
[
(
)
]
E
V
τ (k), x(τ(k); k0, x0)
- V (k0,x0)
=
(
)
= EV
τ (k), x(τ(k); k0, x0)
- V (k0,x0) =
∑
(
)
= EΔV
τ (s), x(τ(s); k0, x0)
s=k0
Учитывая равенства (полученные с учетом правила вычисления повтор-
ного математического ожидания)
[
(
)]
E
ΔV
τ (s), x(τ(s); k0, x0)
=
[
(
(
)
(
))]
=E
V
τ (s + 1), X
τ (s), x(τ(s); k0, x0), ξ(τ(s))
-V
τ (s), x(τ(s); k0, x0)
=
{
[
(
(
)
)]}
=E
E
V
τ (s + 1), X
τ (s), x(τ(s), ξ(τ(s))|x(τ(s)))
= x(τ(s); k0, x0)
-
[
(
)]
−E
V
τ (s), x(τ(s); k0, x0)
=
{
[
(
(
)
)]
=E
E
V
τ (s + 1), X
τ (s), x(τ(s), ξ(τ(s)))
|x(τ(s)) = x(τ(s); k0, x0)
-
}
[
]
− V (τ(s),x(τ(s);k0,x0))
=E
LV (τ(s),x(τ(s);k0,x0))
,
приходим к соотношению (дискретный вариант формулы Дынкина) [9]
(
)
EV
τ (k), x(τ(k); k0, x0)
- V (k0,x0) =
∑
[
(
)]
= E
LV
τ (s), x(τ(s); k0, x0)
s=k0
128
В результате на основании условия (8) получаем неравенство
(
)
(Π.1)
EV
τ (k), x(τ(k); k0, x0)
≤ V (k0,x0
) < ∞.
Если справедливо неравенство k > τε (в этом случае имеем τ(k) = τε), то
выполняются соотношения ∥y1(τ(k); k0, x0)∥ = ∥y1(τε; k0, x0)∥ ≥ ε. Если же
справедливо неравенство k < τε (в этом случае имеем τ(k) = k), то на ос-
новании неравенства Чебышева-Маркова и оценки (П.1) находим
[
]
[
]
P
∥y1(k; k0, x0)∥ > ε
≤ a-11(ε)E
a1(||y1(k;k0,x0)||)
≤
[
]
≤ a-11(ε)E
a1(||y1(k;k0,x0)|| + ||µ(k,x(k;k0,x0))||)
≤
(Π.2)
[
(
)]
≤ a-11(ε)E
V
k,x(k;k0,x0)
=
[
(
)]
= a-11(ε)E
V
τ (k), x(τ(k); k0, x0)
≤ a-11(ε)V (k0,x0).
Поскольку при каждом k ∈ Z+ функция Ляпунова V (k, x) непрерывна,
V (t, 0) ≡ 0, а также выполняются условия (7), то для всех k0 ≥ 0 и для любого
заданного числа L > 0 предельное соотношение
(Π.3)
lim V (k0, x0
)=0
||y0||→0
выполняется при ∥z10∥ ≤ L равномерно по ∥z20∥ < ∞.
Поэтому для всех k0 ≥ 0 и для любого заданного числа L > 0 на основании
неравенств (П.2), (П.3) имеем предельное соотношение
[
]
lim P sup ||y1(k; t0, x0)|| > ε
= 0,
||y0||→0
k>k0
выполняющееся при ∥z10∥ ≤ L равномерно по ∥z20∥ < ∞.
В результате для каждого k0 ≤ 0 и для любых сколь угодно малых чисел
ε > 0, γ > 0, а также для любого наперед заданного числа L > 0 найдется
число δ(ε, γ, L, k0) > 0 такое, что неравенство (2) имеет место для всех k ≥ k0
и x0 ∈ Dδ. Следовательно, при больших значениях z10 в целом по z20 “ча-
стичное” положение равновесия y(k) = 0 системы (1) y1-устойчиво по веро-
ятности.
II. Если вместо условий (7) выполняются условия (9), то для любого задан-
ного числа L > 0 предельное соотношение (П.3) выполняется при ∥z10∥ ≤ L
равномерно не только по ∥z20∥ < ∞, но и по k0 ≥ 0. В результате для каж-
дого k0 ≥ 0 и для любых сколь угодно малых чисел ε > 0, γ > 0, а также
для любого наперед заданного числа L > 0 найдется независимое от k0 чис-
ло δ(ε, γ, L) > 0 такое, что неравенство (2) имеет место для всех k ≥ k0 и
x0 ∈ Dδ. Следовательно, при больших значениях z10 в целом по z20 “частич-
ное” положение равновесия y(k) = 0 системы (1) равномерно y1-устойчиво
по вероятности. Теорема 1 доказана.
129
Доказательство теоремы 2. При выполнении условий теоремы “ча-
стичное” положение равновесия y(k) = 0 системы (1) равномерно y1-устой-
чиво по вероятности при больших значениях z10 в целом по z20.
На основании неравенства (П.1) последовательность v(k) случайных ве-
личин v(k) = V (τ(k), x(τ(k); k0, x0)), порожденных реализациями {x(k, ω),
ξ(k, ω)} случайного процесса {x(k), ξ(k)}, определяемого системой (1), об-
разует неотрицательный супермартингал, являющийся аналогом монотонно
убывающей последовательности в детерминированном случае. Поэтому на
основании неравенства (П.1) для каждой начальной точки x0 из области Dε
с вероятностью единица имеет место предельное соотношение [36]
v(k) = V (τ(k), x(τ(k); k0, x0)) → v∗, k → ∞.
Используя известную схему [2, 3, 9] анализа, можно показать, что равен-
ство v∗ = 0 выполняется с вероятностью единица. Действительно, применяя
операцию математического ожидания и переходя к пределу в обеих частях
неравенства (11), с вероятностью единица получаем
E[a3(||y1(τ(k); k0, x0)||)] → 0, k → ∞.
Поэтому в силу условий (10), (11) и леммы Фату справедливо равен-
ство E[a3(a-12(v∗))] = 0, которое означает, что v∗ = 0. Но в случае v∗ = 0 при
∥y0∥ → 0 имеет место предельное соотношение
{
}
P lim
||y1(k; k0, x0)|| = 0
=1
k→+∞
и, следовательно, “частичное” положение равновесия y(k) = 0 системы (1)
асимптотически y1-устойчиво по вероятности при больших значениях z10 в
целом по z20. Теорема 2 доказана.
СПИСОК ЛИТЕРАТУРЫ
1. Кац И.Я., Красовский Н.Н. Об устойчивости систем со случайными параметра-
ми // Прикл. матем. и механика. 1960. Т. 24. Вып. 5. С. 809-823.
2. Кушнер Г.Дж. Стохастическая устойчивость и управление. М.: Мир, 1969.
3. Хасьминский Р.З. Устойчивость систем дифференциальных уравнений при слу-
чайных возмущениях их параметров. М.: Наука, 1969.
4. Kats I.Ya., Martynyuk A.A. Stability and Stabilization of Nonlinear Systems with
Random Structure. London: Taylor & Francis, 2002.
5. Mao X.R., Yuan C.G. Stochastic Differential Equations with Markovian Swit-ching.
London: Imperial College Press, 2006.
6. Ахметкалиев T. О связи между устойчивостью стохастических систем разност-
ных и дифференциальных систем // Дифференц. уравнения. 1965. Т. 1. № 8.
С. 1016-1026.
7. Халанай А., Векслер Д. Качественная теория импульсных систем. М.: Мир, 1971.
130
8.
Константинов В.М. Об устойчивости стохастических разностных систем //
Пробл. передачи информ. 1970. Т. 6. Вып. 1. С. 81-86.
9.
Пакшин П.В. Дискретные системы со случайными параметрами и структурой.
М.: Физматлит, 1994.
10.
Ажмяков В.В., Пятницкий Е.С. Нелокальный синтез систем стабилизации дис-
кретных стохастических объектов управления // АиТ. 1994. № 2. С. 68-78.
Azhmyakov V.V., Pyatnitskiy E.S. Nonlocal Synthesis of Systems for Stabilization
of Discrete Stochastic Controllable Objects // Autom. Remote Control. 1994. V. 55.
No. 2. P. 202-210.
11.
Барабанов И.Н. Построение функций Ляпунова для дискретных систем со слу-
чайными параметрами // АиТ. 1995. № 11. С. 31-41.
Barabanov I.N. Construction of Lyapunov Functions for Discrete Systems with
Stochastic Parameters // Autom. Remote Control. 1995. V. 56. No. 11. P. 1529-
1537.
12.
Jian X.S., Tian S.P., Zhang T.L., Zhang W.H. Stability and Stabilization of Non-
linear Discrete-Time Stochastic Systems // Int. J. Robust Nonlinear Control. 2019.
V. 29. No. 18. P. 6419-6437.
13.
Qin Y., Cao M., Anderson B.D.O. Lyapunov Criterion for Stochastic Systems and
its Applications in Distributed Computation // IEEE Trans. Autom. Control. 2020.
V. 65. No. 2. P. 546-560.
14.
Teel A.R., Hespanha J.P., Subbaraman A. Equivalent Characterizations of Input-to-
State Stability for Stochastic Discrete-Time Systems // IEEE Trans. Autom. Con-
trol. 2014. V. 59. No. 2. P. 516-522.
15.
Румянцев В.В. Об устойчивости движения по отношению к части переменных //
Вестн. МГУ. Сер. Матем., Механика, Физика, Астрономия, Химия. 1957. № 4.
C. 9-16.
16.
Румянцев В.В., Озиранер А.С. Устойчивость и стабилизация движения по от-
ношению к части переменных. М.: Наука, 1987.
17.
Воротников В.И. Частичная устойчивость и управление: состояние проблемы и
перспективы развития // АиТ. 2005. № 4. С. 3-59.
Vorotnikov V.I. Partial Stability and Control: the State of the Art and Developing
Prospects // Autom. Remote Control. 2005. V. 66. No. 4. P. 511-561.
18.
Rajpurohit T., Haddad W.M. Stochastic Finite-Time Partial Stability, Partial-State
Stabilization, and Finite-Time Optimal Feedback Control // Math. Control, Signals,
Syst. 2017. V. 29. No. 2. art. 10.
19.
Rajpurohit T., Haddad W.M. Partial-State Stabilization and Optimal Feedback Con-
trol for Stochastic Dynamical Systems // J. Dynam. Syst., Measurement, and Con-
trol. 2017. V. 139. No. 9. P. DS-15-1602.
20.
Воротников В.И., Мартышенко Ю.Г. К задаче частичной устойчивости по ве-
роятности нелинейных стохастических систем // АиТ. 2019. № 5. С. 86-98.
Vorotnikov V.I., Martyshenko Y.G. On the Partial Stability in Probability of Non-
linear Stochastic Systems // Autom. Remote Control. 2019. V. 80. No. 5. P. 856-866.
21.
Воротников В.И., Мартышенко Ю.Г. К задаче частичной устойчивости нели-
нейных дискретных систем // Мехатроника. Автоматизация. Управление. 2017.
Т. 18. № 6. С. 371-375.
22.
Ram
ırez-Llanos E., Mart´ınez S. Distributed and Robust Fair Optimization Applied
to Virus Diffusion Control // IEEE Trans. Network Sci. Engineer. 2017. V. 4. No. 1.
P. 41-54.
131
23.
Воротников В.И. Об устойчивости и устойчивости по части переменных “ча-
стичных” положений равновесия нелинейных динамических систем // Докл.
РАН. 2003. Т. 389. № 3. С. 332-337.
24.
Воротников В.И., Мартышенко Ю.Г. К теории частичной устойчивости нели-
нейных динамических систем // Изв. РАН. Теория и системы управления. 2010.
Т. 51. Вып. 5. С. 23-31.
25.
Юдаев Г.С. Об устойчивости стохастических разностных систем // Изв. Вузов.
Матем. 1979. № 8. С. 74-78.
26.
Phillis Y.A. y-Stability and Stabilization in the Mean of Discrete-Time Sto-chastic
Systems // Int. J. Control. 1984. V. 40. No. 1. P. 149-160.
27.
Шаров В.Ф. Устойчивость и стабилизация стохастических систем по отношению
к части переменных // АиТ. 1978. № 11. С. 63-71.
Sharov V.F. Stability and Stabilization of Stochastic Systems vis-a-vis Some of the
Variables // Autom. Remote Control. 1978. V. 39. No. 11. P. 1629-1636.
28.
Vorotnikov V.I. Partial Stability and Control. Boston: Birkhauser, 1998.
29.
Ignatyev O. Partial Asymptotic Stability in Probability of Stochastic Differential
Equations // Statist. Probab. Lett. 2009. V. 79. No. 5. P. 597-601.
30.
Zuyev A., Vasylieva I. Partial Stabilization of Stochastic Systems with Application
to Rotating Rigid Bodies // IFAC-PapersOnLine. 2019. V. 52. No. 16. P. 162-167.
31.
Sultanov O. Capture into Parametric Autoresonance in the Presence of Noise //
Commun. Nonlinear Sci. Numer. Simul. 2019. V. 75. P. 14-21.
32.
Kao Y., Wang C., Zha F., Cao H. Stability in Mean of Partial Variables for Stochas-
tic Reaction-Diffusion Systems with Markovian Switching // J. Franklin Institute.
2014. V. 351. No. 1. P. 500-512.
33.
Socha L., Zhu Q.X. Exponential Stability with Respect to Part of the Variab-les for
a Class of Nonlinear Stochastic Systems with Markovian Switching // Math. Comp.
Simul. 2019. V. 155. P. 2-14.
34.
Socha L. Stability and Positivity with Respect to Part of the Variables for Positive
Markovian Jump Systems // Bull. Polish Acad. Sci.: Tech. Sci. 2019. V. 67. No. 4.
P. 769-775.
35.
Хрусталев М.М., Онегин Е.Е. Необходимые и достаточные условия в задаче
оптимальной стабилизации квазилинейных стохастических систем // АиТ. 2019.
№ 7. С. 89-104.
Khrustalev M.M., Onegin E.E. Necessary and Sufficient Conditions for Optimal Sta-
bilization of Quasi-Linear Stochastic Systems // Autom. Remote Control. 2019.
V. 80. No. 7. P. 1252-1264.
36.
Дуб Дж.Л. Вероятностные процессы. М.: ИЛ, 1956.
Статья представлена к публикации членом редколлегии П.В. Пакшиным.
Поступила в редакцию 05.10.2020
После доработки 20.02.2021
Принята к публикации 16.03.2021
132