Автоматика и телемеханика, № 1, 2022
Линейные системы
© 2022 г. А.И. ГЛУЩЕНКО, д-р техн. наук (strondutt@mail.ru),
К.А. ЛАСТОЧКИН (lastconst@yandex.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва),
В.А. ПЕТРОВ, канд. техн. наук (petrov.va@misis.ru)
(Старооскольский технологический институт им. А.А. Угарова (филиал)
ФГАОУ ВО “Национальный исследовательский технологический
университет “МИСиС”, Старый Оскол)
НОРМАЛИЗАЦИЯ ВОЗБУЖДЕНИЯ РЕГРЕССОРА В ПРОЦЕДУРЕ
ДИНАМИЧЕСКОГО РАСШИРЕНИЯ И СМЕШИВАНИЯ1
Предложен подход к нормализации возбуждения регрессора контура
идентификации, построенного на основе процедуры динамического рас-
ширения и смешивания. Применение этого подхода позволяет при посто-
янном значении коэффициента усиления контура оценки иметь одина-
ковую верхнюю границу параметрической ошибки идентификации для
скалярных регрессоров с различной степенью возбуждения, что является
существенным преимуществом для практики. Выполнено сравнение раз-
работанного подхода с известным методом амплитудной нормализации
регрессора и показано, что классический метод нормализации не обла-
дает указанным свойством. В качестве валидации полученных теорети-
ческих выводов приводятся результаты сравнительного математического
моделирования классического градиентного контура оценки, контуров с
амплитудной нормализацией регрессора и с предложенной нормализаци-
ей возбуждения регрессора.
Ключевые слова: идентификация, градиентный метод, параметрическая
ошибка, коэффициент усиления контура оценки, степень возбуждения,
нормализация.
DOI: 10.31857/S0005231022010020
1. Введение
Методы классической теории идентификации динамических объектов [1]
получили широкое распространение в инженерной практике специалистов по
автоматизации технологических процессов различных отраслей промышлен-
ности и, как правило, используются в процессе пусконаладочных работ для
получения математической модели технологического агрегата. Полученная
модель в дальнейшем обычно используется для расчета параметров промыш-
ленных ПИ и ПИД регуляторов. При этом точность модели является крити-
чески важным показателем, поскольку от нее напрямую зависит и точность
1 Работа выполнена при частичной финансовой поддержке Российского фонда фунда-
ментальных исследований (проект № 18-47-310003 р_а).
22
параметров регуляторов, а значит, и экономические показатели технологиче-
ского агрегата, зависящие от качества управления.
Классические методы теории идентификации, к которым прежде всего
относятся рекурсивный метод наименьших квадратов и метод градиентно-
го спуска, обеспечивают точную идентификацию параметров модели толь-
ко при выполнении условия незатухающего возбуждения регрессора [2]. На
практике это требует инжекции высокочастотного тестового сигнала в управ-
ляющий вход технологического агрегата [3]. Использование метода инжек-
ции не всегда возможно в условиях реального промышленного производства.
Поэтому для ослабления условия незатухающего возбуждения за последние
несколько лет в публикациях были предложены новые методы [4-9], позво-
ляющие так или иначе улучшить точность идентификации параметров мо-
дели и, следовательно, степень ее соответствия реальному промышленному
агрегату. Главным достижением этих методов можно считать новые конту-
ры оценки со сходимостью за конечное время [4-6] и различные алгоритмы
фильтрации и предобработки регрессора [7-10], позволяющие исключить ин-
жекцию тестовых сигналов и точно идентифицировать параметры модели в
режиме работы технологического агрегата, близком к нормальному. В целом
с некоторыми оговорками можно считать, что проблема точной идентифика-
ции стационарных параметров динамических объектов является развитой с
ясными направлениями дальнейших исследований и перспективными прак-
тическими приложениями [11, 12] в промышленности.
Среди актуальных направлений исследований необходимо отметить пере-
нос полученных результатов на регрессионные уравнения с нелинейной пара-
метризацией [13] и интервально заданными и нестационарными параметрами
[6, 9,14].
Другой, менее проработанной проблемой как классических, так и совре-
менных контуров идентификации является задача выбора коэффициента уси-
ления γ закона оценки [15].
Для контуров оценки, обеспечивающих сходимость оценок параметров мо-
дели за конечное время [4-6], данная проблема состоит в необходимости вы-
бора коэффициента γ исходя из удовлетворения специальных условий.
Для классического градиентного контура оценки, а также для контуров
оценки градиентного типа, построенных с использованием процедур пред-
обработки регрессора [7-10], данную проблему можно условно разделить на
технический и теоретический уровни.
На техническом уровне проблема заключается в невозможности числен-
ного решения средствами современной промышленной микроконтроллерной
техники “жесткого” дифференциального уравнения контура оценки, получае-
мого при большом значении коэффициента усиления [15].
На теоретическом уровне упомянутая проблема состоит в: а) прямой за-
висимости от коэффициента усиления скорости сходимости оценок парамет-
ров модели и обратной зависимости точности получаемых оценок при нали-
чии возмущений, б) необходимости использования различных коэффициен-
тов усиления в зависимости от степени возбуждения регрессора [1].
23
В данной статье остановимся подробней на п. (б) теоретического уров-
ня проблемы выбора коэффициента усиления законов оценки градиентного
типа.
Основная трудность выбора коэффициента усиления как для базового гра-
диентного контура оценки, так и для его усовершенствованных путем пред-
обработки регрессора аналогов [7-10] заключается в зависимости между ве-
личиной верхней оценки ошибки идентификации и произведением коэффи-
циента усиления контура оценки γ на степень возбуждения регрессора α.
Здесь отметим, что для стандартного градиентного контура оценки зависи-
мость ошибки идентификации от γα получена при некоторых допущениях
[16], а для большинства современных контуров оценки с предобработкой ре-
грессора эта зависимость имеет место без допущений.
Степень возбуждения регрессора α в общем виде определяется длиной ин-
тервала возбуждения T и амплитудой регрессора A, поэтому упомянутая за-
висимость означает различную верхнюю оценку ошибки идентификации для
регрессоров с различной степенью возбуждения. Другими словами, при выбо-
ре стационарного коэффициента усиления γ для одних регрессоров парамет-
рическая ошибка может быть чрезвычайно большой, а для других напротив
чрезвычайно малой. С точки зрения практики применения современных ме-
тодов теории идентификации в промышленности весьма желательным было
бы иметь одинаковую верхнюю оценку параметрической ошибки для регрес-
соров с различной степенью возбуждения α.
Для этого в публикациях были предложены: 1) метод масштабирова-
ния [17], позволяющий, изменяя коэффициент усиления контура оценки γ в
зависимости от косвенной оценки степени возбуждения регрессора α, поддер-
живать приближенно одинаковую верхнюю оценку параметрической ошибки;
2) рекурсивный метод наименьших квадратов с экспоненциальным забывани-
ем [14, 15, 17], который в пределе обеспечивает зависимость верхней оценки
параметрической ошибки только от коэффициента экспоненциального забы-
вания. Метод масштабирования требует ручного выбора целого ряда пара-
метров масштабирования, а рекурсивный метод наименьших квадратов обес-
печивает необходимое свойство пропорциональности верхней оценки парамет-
рической ошибки и коэффициента забывания только в предельном случае и
только в контурах оценки с регрессорами определенного вида.
Метод масштабирования и рекурсивный метод наименьших квадратов с
экспоненциальным забыванием основаны на общей идее поддержания соот-
ношения γα постоянным путем динамической коррекции коэффициента уси-
ления γ в зависимости от оценки степени возбуждения регрессора α. Однако,
по мнению авторов настоящей статьи, такой подход, в конечном итоге, неиз-
бежно приводит или к новому контуру настройки с новыми параметрами,
требующими ручной настройки, или к различного рода эвристикам.
Поэтому в данной работе для получения одинаковой верхней оценки па-
раметрической ошибки для регрессоров с различной степенью возбуждения
предлагается не настраивать коэффициент усиления γ, а разработать проце-
дуру нормирования возбуждения регрессора, позволяющую получить зави-
24
симость параметрической ошибки не от произведения γα, а от нового про-
изведения γΔ, в котором Δ - величина, в отличие от α, не зависящая от
амплитуды A регрессора.
Предлагаемый подход позволит использовать стационарный коэффициент
усиления оценки γ и при этом иметь одинаковую верхнюю оценку парамет-
рической ошибки для различных исходных регрессоров.
Построить контур идентификации, обладающий указанными свойствами,
в статье предлагается, дополнив один из методов предобработки регрессора,
а именно процедуру динамического расширения и смешивания [10].
2. Формальное описание проблемы и постановка задачи
Рассматривается задача идентификации параметров класса линейных
объектов:
b(p)
(2.1)
y (t) =
u(t),
a (p)
где p = d/dt оператор дифференцирования, y выходная переменная, u
∑n-1
∑m
управляющее воздействие, b (p) =
bipi и a(p) = pn +
aipi
поли-
i=0
i=0
номы с квазистационарными (bi ≈ 0, ˙ai ≈ 0) неизвестными параметрами.
Модель (2.1) известным методом [15] может быть представлена в виде ли-
нейной регрессии:
z (t) = θTω (t) + η = y (t) + ψTω2 (t) +η,
θ := [bm, bm-1, . . . , b0, an-1, an-2, . . . , a0]T , η := ρeΨct,
(2.2)
[
]T
αm (p)
αn-1 (p)
[
]
ω (t) :=
u (t)
-
y (t)
=
ωT1 (t) ωT2 (t)
T,
Ψ(p)
Ψ (p)
где z ∈ R
измеримая функция, ω ∈ Rm+n+1
измеримый регрессор,
θ
вектор неизвестных параметров, η ∈ R
экспоненциально затухаю-
щее возмущение, вызванное несоответствием начальных условий в (2.1) и
[
]T
(2.2), αi (p) :=
pi,pi-1,... ,1
оператор дифференцирования, Ψ (p) = pn +
+ψTαn-1 (p) устойчивый полином с ψ = [ψn-1,ψn-2,... ,ψ0]T, Ψc мат-
рица, соответствующая полиному Ψ (p).
Относительно возмущения η в статье принимается следующее предполо-
жение.
Предположение 1. Возмущение η = 0 ∀t ≥ 0 или существует извест-
ное t0 → 0, такое что η = 0 ∀t ≥ t0.
Замечание 1. В предположении 1 предполагается или полное отсутствие
в регрессии (2.2) возмущения η, или обеспечение для η достаточно быстрой
сходимости к нулю путем выбора характеристического полинома Ψ (p).
В дальнейших рассуждениях также будем предполагать выполнение для
[
]
регрессора ω условия конечного возбуждения на интервале
ts; ts + T
25
Определение 1. Регрессор ω возбуждается конечно (ω ∈ FE) на ин-
[
]
тервале
ts; ts + T
, если существуют ts ≥ t0 ≥ 0, T > 0 и α > 0 такие, что
верно неравенство
∫
(2.3)
ω (τ) ωT
(τ) dτ ≥ αI,
ts
где α - степень возбуждения, I - единичная матрица.
Учитывая предположение 1, применим к регрессии (2.2) процедуру дина-
мического расширения и смешивания [10]. Для этого ∀t ≥ t0 введем операто-
ры запаздывания в количестве m + n:
(2.4)
);
i ∈ {1,2,...,m + n},
(.)fi(t):=[Hi(.)](t)=(.)(t-di
где di - параметр, определяющий временнóе запаздывание i-го оператора
(2.4).
Пропуская через (2.4) функцию z и регрессор ω, сформируем ∀t ≥ t0 рас-
ширенное уравнение регрессии
zf (t) = ωf (t) θ,
[
]T
zf (t) : =
z (t) zf1 (t) . . . zfn+m (t)
;
(2.5)
[
]T
ωf (t) := ω (t) ωf1 (t) ... ω
fn+m
(t)
Домножив уравнение (2.5) слева на присоединенную матрицу алгебраиче-
ских дополнений adj {ωf (t)} матрицы расширенного регрессора ωf (t), а так-
же пользуясь равенством adj {ωf (t)} ωf (t) = det {ωf (t)} I, получим ∀t ≥ t0
уравнение:
z (t) = ω (t) θ,
(2.6)
z (t) : = adj {ωf (t)} zf (t) ; ω (t) : = det {ωf (t)} ,
где z ∈ Rm+n+1, ω ∈ R.
Относительно параметров di принимается предположение 2.
Предположение 2. Параметры di выбраны так, что если ω ∈ FE на
[
]
интервале
ts; ts + T
, то ω ∈ FE на интервале [ts; ts + T ], поэтому существу-
ют ts ≥ t0 > ts, T > 0 и α > 0 такие, что для ω верно неравенство
∫
(2.7)
ω2
(τ) dτ ≥ α,
ts
где α - степень возбуждения скалярного регрессора, t0 - момент времени
неравенства нулю выхода оператора (2.4) с максимальным значением пара-
метра di.
26
Замечание 2. Предположение 2 необходимо, поскольку при неудачном
выборе параметров di, матрица ωf (t) может являться вырожденной ∀t [18].
Ослабить предположение 1 возможно, использовав вместо операторов запаз-
дывания (2.4) устойчивые минимально-фазовые динамические фильтры или
применив для генерации скаляризованной регрессии (2.6) вместо базовой про-
цедуры DREM ее модифицированный аналог [19] или процедуру MREM [20].
В силу принятых предположений, уравнение стандартного градиентного
контура оценки параметров регрессии (2.6) имеет вид
(
)
˜
ˆ
(2.8)
θi (t) =
θi (t) = -γω
θiω - z
= -γω2θi
(t) .
Получим решение скалярного дифференциального уравнения (2.8):
∫
t
-γ
ω2(τ)dτ
(2.9)
θi (t) = et0
θi (t0).
С учетом предположения 1 из (2.9) получим выражение для ошибки
θi (ts + T ) на интервале [ts; ts + T ]:
∫
-γ
(2.10)
θi (ts + T ) = ets
ω2dτ θi (ts) ≤ e-γα θi (ts
).
Как следует из (2.10), параметрическая ошибка
θi (ts + T ) ограничена
сверху выражением, зависящим от произведения γα. С точки зрения прак-
тики применения контура оценки (2.8) полезно поддерживать одинаковую
точность идентификации, а значит, иметь для различных регрессоров оди-
наковую верхнюю границу (2.10) на параметрическую ошибку. Однако, как
следует из (2.7), параметр α меняется от регрессора к регрессору и определя-
ется длиной интервала возбуждения T и амплитудой регрессора A. Поэтому
для поддержания одинакового соотношения γα при изменении параметров A
и T в контуре оценки (2.8) требуется коррекция коэффициента γ. В против-
ном случае при постоянном γ для регрессоров с α → 0, но α > 0 возможны
значения параметрической ошибки, такие чтоθi (ts + T ) →θi (ts), а для ре-
грессоров с α → ∞, наоборот,θi (ts + T ) → 0.
В этой статье ограничимся решением задачи поддержания одинаковой
верхней границы (2.10) параметрической ошибки (2.8) для класса регрессо-
ров c различными амплитудами A, но возбуждаемыми конечно на интервалах
одинаковой длинны T.
Определение 2. Регрессоры ωj возбуждены конечно на одинаковом ин-
тервале времени [ts; ts + T], если существуют ts ≥ t0 > ts, T > 0 и αj > 0
такие, что верны неравенства
∫
(2.11)
ω2j (τ) dτ ≥ αj,
ts
где αj - степень возбуждения j-го регрессора.
27
Замечание 3. В частности, классу (2.11) принадлежат регрессоры, по-
лученные процедурой (2.2)-(2.6) при управляющих воздействиях различной
амплитуды (например, u = 1, u = 10, u = 100).
На частном численном примере продемонстрируем необходимость коррек-
ции коэффициента усиления γ для регрессоров из класса (2.11).
Пример 1. Пусть ts = 0 c, T = 10 c, тогда при ω = Ae-1t в (2.10) соответ-
ственно имеем:
∫
-γA2
e-2tdτ
(2.12)
0
(0) .
θi (10) = e
θi (0) ≈ e-γA20,5 θi
Откуда, устремив A к нулю при зафиксированном γ, получаемθi (10) →θi (0),
что означает: 1) разную верхнюю границу на параметрическую ошибку для
регрессоров из класса (2.11); 2) необходимость перевыбора коэффициента γ
при изменении амплитуды A регрессора для поддержания одинаковой верх-
ней границы параметрической ошибки.
Обойти необходимость перевыбора коэффициента γ можно было бы, имея
для регрессоров из класса (2.11) вместо регрессора ω в уравнениях контура
оценки (2.8)-(2.10) некоторый нормированный регрессор ϕ =ωf(ω) , такой что
верно неравенство
∫
(2.13)
ϕ2
(τ) dτ ≥ Δ > 0.
ts
Тогда перевыбор коэффициента γ не требуется, а для всех регрессоров
класса (2.11) обеспечивается одинаковая верхняя граница параметрической
ошибки.
Таким образом, цель настоящей статьи разработка функции нормали-
зации f (ω), позволяющей для регрессоров из класса (2.11) получить одина-
ковую верхнюю границу параметрической ошибки без перевыбора коэффи-
циента γ.
Замечание 4. В примере 1 экспоненциально затухающий регрессор был
использован исключительно для наглядности, а продемонстрированная про-
блема характерна для всех регрессоров c различными амплитудами, но воз-
буждаемыми конечно на интервалах одинаковой длины T.
3. Основной результат
Определим нормирующую функцию для регрессора ω в виде
(3.1)
f (ω) : = sat (ω) ,
где sat (ω) - функция насыщения:
{
sgn (ω) ωmin, ecли
|ω| ≤ ωmin,
(3.2)
sat (ω) =
ω иначе.
28
Разделим регрессию (2.6) на нормирующую функцию (3.1):
Υ = ϕθ,
{
(3.3)
z
ω
|ω| ω-1min, если
|ω| ≤ ωmin,
Υ:=
;
ϕ:=
=
f (ω)
f (ω)
1 иначе,
где ϕ - нормированный скалярный регрессор.
Замечание 5. На данном этапе работы необходимо кратко отметить воз-
можность аналитического вычисления из регрессии (3.3) оценки неизвестных
параметров за конечное время. На основании определения регрессора ϕ в
(3.3) неизвестные параметры θ при отсутствии шумов измерения w могут
быть найдены за конечное время tk с помощью процедуры:
θ = Υ(tk),
(3.4)
если ϕ (t) = 1, то tk = t.
Однако поскольку на практике в регрессии (3.3) неизбежно присутству-
ют шумовые составляющие w (tk), то ϕ(tk) = 1 может означать равенство
Υ (tk) = θ + w (tk), в котором в конкретный момент времени tk может слу-
читься так, что w (tk) > θ. Тогда оценка (3.3), полученная за конечное время,
является недостаточно точной. В то же время применение градиентного кон-
тура идентификации для регрессии Υ (t) = ϕ (t) θ + w (t) позволяет получить
оценку параметров не по одной точке t = tk, а следовательно, уменьшить
влияние на качество оценки возмущений в каждый конкретный момент вре-
мени tk [15].
Утверждение 1. Нормированный регрессор ϕ ∈ [0; 1].
Утверждение 2. Если для регрессора ω выполняется условие конечного
возбуждения (2.7) на интервале [ts; ts + T ], то для нормированного регрес-
сора ϕ на интервале [ts; ts + T]:
1) при |ω| ≤ ωmin выполняется неравенство
∫
(3.5)
αω-2min ≤
ϕ2
(τ)dτ ≤ T;
ts
2) при |ω| > ωmin выполняется неравенство
∫
(3.6)
0<Δ≤ ϕ2
(τ) dτ = T,
ts
где Δ ∈ (0; T ] - одинаковая величина ∀ωj, для которых на интервале
[ts; ts + T ] верно |ωj| > ωmin.
29
Доказательства утверждений 1 и 2 приведены в Приложении.
Градиентный контур оценки, построенный по нормированной регрессии
(3.3), имеет вид:
˜
(3.7)
θi (t) = -γϕ2
θi
(t).
Получим решение дифференциального уравнения
(3.7) на интервале
[ts; ts + T ]:
∫
-γ
ϕ2(τ)dτ
(3.8)
θi (ts + T ) = ets
θi (ts).
Для решения (3.8), пользуясь утверждением 2, могут быть получены два
важных следствия.
Следствие 1. Для всех ωj, для которых на всем интервале [ts; ts + T]
верно |ωj| ≤ ωmin, параметрическая ошибкаθi (ts + T ) ограничена в соответ-
ствии c выражением:
(3.9)
e-γT θi (ts) ≤θi (ts + T) ≤ e-γαjωminθi (ts
).
Следствие 2. Для всех ωj, для которых на всем интервале [ts; ts + T]
верно |ωj| > ωmin, параметрическая ошибкаθi (ts + T ) ограничена в соответ-
ствии c выражением:
(3.10)
θi (ts + T ) = e-γT θi (ts) ≤ e-γΔ θi (ts).
В следствиях 1 и 2 рассмотрены ситуации, когда на всем интервале воз-
буждения [ts; ts + T ] выполняется либо условие |ωj| > ωmin, либо условие
|ωj| ≤ ωmin. На практике такие ситуации обычно периодически чередуются
на интервале возбуждения [ts; ts + T ], поэтому рассмотрим ситуацию, ко-
гда для ωj на интервале [ts; ts + T ] хотя бы раз было выполнено условие
|ωj| > ωmin. Для этого введем утверждение 3.
У т в е р ж д е н и е 3. Пусть ωj ∈ FE на интервале
[ts; ts + T ] и
для ωj существуют моменты времени tj ∈ (0; T ) и Tj ∈ (tj ; T ) такие, что
∀t ∈ [ts + tj; ts + Tj] верно неравенство |ωj| > ωmin.
Тогда:
1. Для нормированного регрессора ϕ верно
∫
(3.11)
0<Δmin ≤
ϕ2
(τ)dτ ≤ T,
ts
где Δmin - одинаковая величина ∀ωj, соответствующих постановке утвер-
ждения 3.
30
2. Для всех ωj, соответствующих постановке утверждения 3, парамет-
рическая ошибкаθi (ts + T) ограничена сверху в соответствии с выражени-
ем
(3.12)
θi (ts + T ) ≤ e-γΔmin θi (ts).
Доказательство утверждения 3 и определение величины Δmin приводятся
в Приложении.
Таким образом, из утверждения 3 следует, что выбор параметра ωmin
из условия выполнения неравенства |ωj| > ωmin хотя бы раз на интервале
[ts; ts + T ] является необходимым и достаточным для ограниченности пара-
метрической ошибкиθi (ts + T ) сверху одинаковой величиной для различных
регрессоров ωj, что позволяет в контуре оценки (3.7) использовать одинако-
вое значение коэффициента усиления γ.
Замечание 6. Выбор величины ωmin из класса (2.11) позволяет выде-
лить некоторый подкласс регрессоров, для которых хотя бы раз на интер-
вале возбуждения [ts; ts + T ] выполняется |ωj| > ωmin, и поэтому существует
одинаковая верхняя оценка параметрической ошибки. Для регрессоров ωj , не
входящих в этот подкласс, т.е. таких, для которых на всем интервале возбуж-
дения [ts; ts + T ]
|ωj| ≤ ωmin будет осуществлена нормализация регрессора,
но не нормализация его возбуждения (3.5). Поэтому на практике величи-
ну ωmin необходимо выбирать, исходя из априорных данных о минимально
возможном регрессоре ωj и максимальной амплитуде шумов измерения. При
неудачном выборе параметра ωmin, так что |ωj| ≤ ωmin ∀t ∈ [ts; ts + T ], пред-
ложенная нормализация при ωmin < 1 позволяет (3.9) увеличить в ω-2min раз
исходную степень возбуждения регрессора, что свидетельствует о преимуще-
стве выбора значений параметра ωmin из условия ωmin < 1.
Продемонстрируем описанные свойства нормированного контура оценки
(3.7) на примере 2.
Пример 2. Пусть ts = tj = 0 с, T = 10 с, ωmin = 10-2. Рассмотрим для
примера регрессоры: ω1 = e-1t и ω2 = 10e-1t. Чтобы воспользоваться выво-
дами утверждения 3, сначала определим моменты времени Tj для каждого
регрессора:
(
)
0,01
ln
ln (0,01)
10
(3.13)
T1 =
≈ 4,61; T2
=
≈ 6,91.
-1
-1
Откуда, учитывая ωmin = 10-2, можем получить функциональное описа-
ние регрессоров ϕ1 и ϕ2 на соответствующих интервалах (см. таблицу).
Таблица
t
ϕ1
t
ϕ2
[0; 4,61]
1
[0; 6,91]
1
[4,61; 10]
|ω| ω-1min = e-1(t-4,61)
[6,91; 10]
|ω| ω-1min = e-1(t-6,91)
31
Пользуясь полученным описанием регрессоров ϕ1 и ϕ2, вычислим значение
интеграла в (3.8):
∫
10
∫
∫
10
ϕ21 (τ) dτ ≈
12dτ + e-2(t-4,61)dτ ≈ 5,11 ≥ Δmin,
0
0
4,61
(3.14)
∫
10
∫
∫
10
ϕ22 (τ)dτ ≈
12dτ + e-2(t-6,91)dτ ≈ 7,409 ≥ Δmin.
0
0
6,91
Зная моменты времени Tj , в соответствии с (П.7) для ϕ1 и ϕ2 можем вы-
брать общую Δmin из интервала (0; 4,61]. Тогда параметрическая ошибка на
интервале [0; 10] для регрессоров ϕ1 и ϕ2 имеет вид:
θϕ1i (10) ≈ e-γ5,11 θi (ts) ≤ e-γΔmin θi (0) ,
(3.15)
θϕ2i (10) ≈ e-γ7,409 θi (ts) ≤ e-γΔmin θi (0) .
Как следует из (3.14) и (3.15), для параметрических ошибок, полученных
контуром (3.7) с различными регрессорами, существует одинаковая оценка
сверху, значение которой может быть отрегулировано с помощью выбора еди-
ного коэффициента усиления γ.
4. Сравнение с нормализованным градиентным законом оценки
Сравним разработанный контур оценки с уже известным градиентным
контуром с классической нормализацией регрессора [15]. Уравнение гради-
ентного контура оценки с классической нормализацией имеет вид
˜
ω2
(4.1)
θi = -γ
θi.
1+ω2
При выполнении условия (2.7) для нормированного регрессора будет вер-
ным неравенство
∫
ω2 (τ)
(4.2)
0<αn ≤
dτ < T,
1 + ω2 (τ)
ts
где αn < α - степень возбуждения нормированного регрессора.
Как следует из (4.2), степень возбуждения αn нормированного регрессо-
ра в законе оценки (4.1) строго меньше степени возбуждения исходного α и
строго ограничена сверху величиной T для любого регрессора.
Однако в сравнении с предложенной в этой статье нормализацией воз-
буждения регрессора, во-первых, верхняя оценка возбуждения в (4.2) только
строгая, во-вторых, в предложенном контуре оценки (3.7) в самом плохом
32
случае (3.5) возможно не уменьшить, а увеличить степень возбуждения пу-
тем выбора ωmin < 1.
С учетом (4.2) верхняя оценка на решение дифференциального уравне-
ния (4.1) на интервале [ts; ts + T ] имеет вид
(4.3)
θi (ts + T ) ≤ e-γαn θi (ts).
Из (4.3) по аналогии с (2.10) следует, что для контура оценки с классиче-
ской нормализацией (4.1) также требуется перевыбор коэффициента усиле-
ния γ с целью поддержания соотношения γαn постоянным для регрессоров
с различной степенью возбуждения αn, в то время как в разработанном кон-
туре оценки (3.7) этого не требуется.
5. Численный пример
В среде Matlab/Simulink сравним разработанный контур оценки (3.7) с
нормализацией возбуждения регрессора с градиентным контуром (2.8) и гра-
диентным контуром с нормализованным регрессором (4.1). Моделирование
будем проводить, используя численное интегрирование методом Эйлера c по-
стоянным шагом дискретизации τs = 10-2 с.
В качестве объекта, параметры которого необходимо идентифицировать,
выберем следующее звено:
b1p + b0
2p + 1
(5.1)
y (t) =
u(t) =
u(t).
p2 + a1p + a0
p2 + 1p + 2
Параметры фильтров (2.2), величины задержек (2.4), а также пара-
метр ωmin зададим следующим образом:
(5.2)
ψ1 = 20; ψ0 = 100; d1 = 0,2; d2 = 0,4; d3 = 0,6; ωmin = 10-12.
Значения задержек были определены в соответствии с рекомендациями,
данными в [18], а величина параметра ωmin была выбрана в соответствии с
замечанием 6.
j
1,0
0,8
0,6
0,4
0,2
0
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
t, c
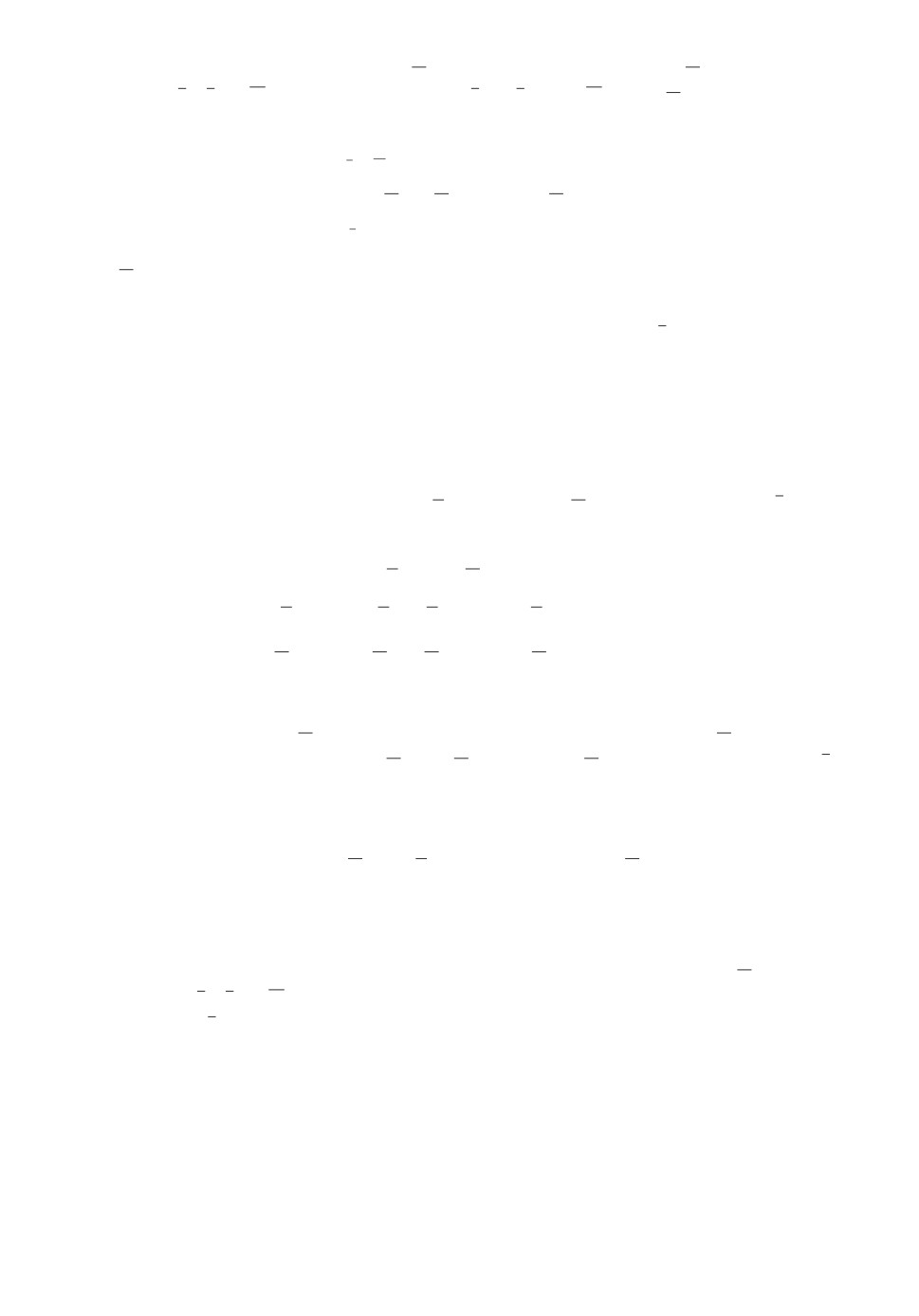
Рис. 1. Сравнение нормализованных регрессоров ϕ при различных u (сплош-
ная линия u = 1, штриховая линия u = 10, штрихпунктирная линия
u = 100).
33
~
||q||-(2.8)
3,5
3,0
2,5
2,0
1,5
1,0
0,5
0
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
t, c
~
||q||-(3.7)
3,2
3,0
UB
2,8
2,6
2,4
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5 t, c
~
||q||-(4.1)
3,5
3,0
2,5
2,0
1,5
1,0
0,5
0
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5 t, c
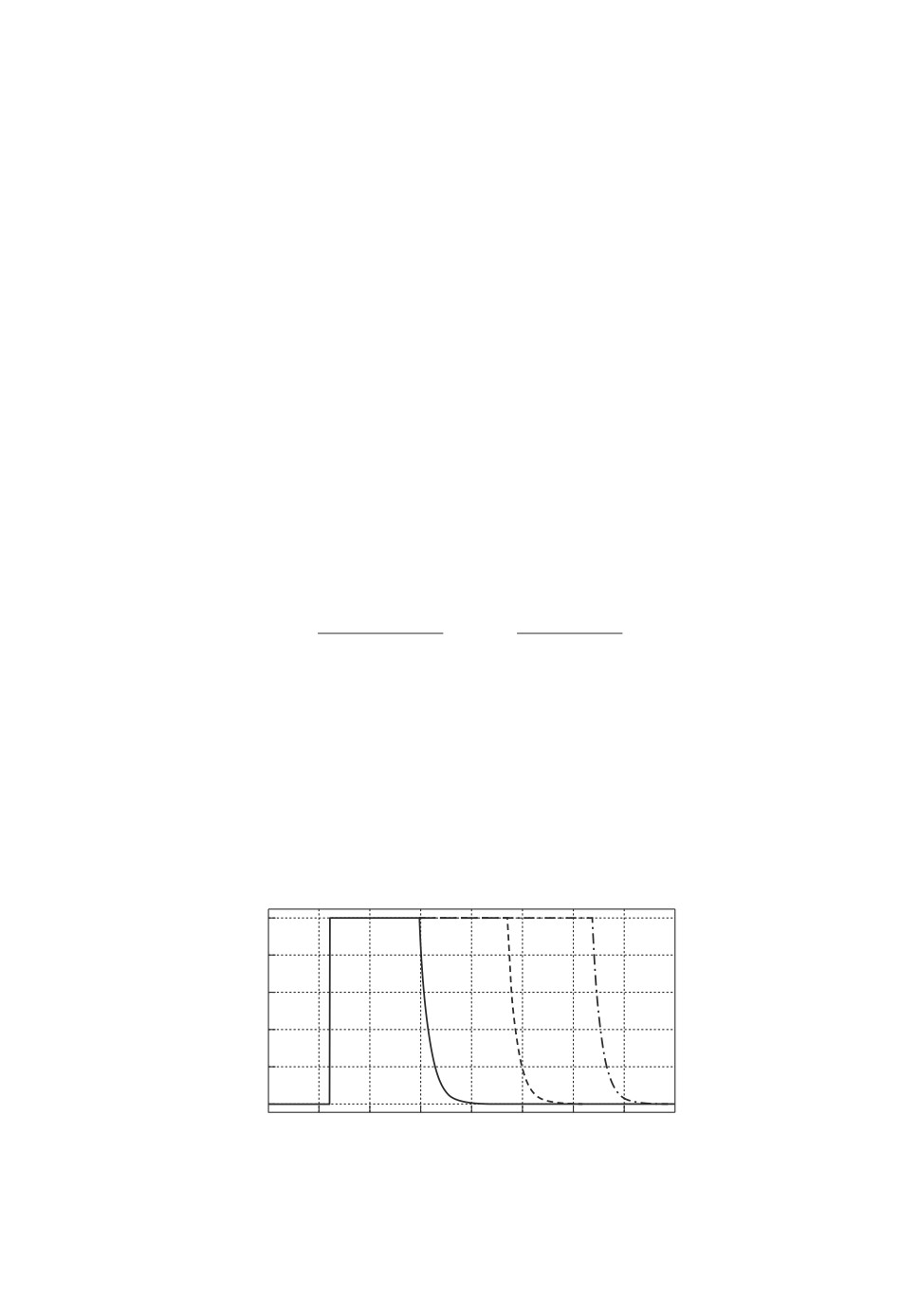
Рис. 2. Нормы параметрических ошибок контуров оценки (2.8), (3.7) и (4.1)
(сплошная линия u = 1, штриховая линия u = 10, штрихпунктирная ли-
ния u = 100, UB Ultimate Bound (верхняя граница)).
В качестве сигнала управления u на вход объекта (2.1) в соответствии с
замечанием 1 будем подавать постоянные сигналы различной амплитуды:
(5.3)
u = 1; u = 10; u = 100.
Начальную параметрическую ошибку примемθ(0) = -θ, а коэффициенты
усиления моделируемых контуров оценки выберем следующим образом:
(5.4)
γ = 104; γNE = 0,1; γNR = 104,
где γ, γNE , γNR - коэффициенты усиления контуров оценки (2.8), (3.7) и (4.1)
соответственно.
На рис. 1 приведено сравнение нормализованных регрессоров ϕ, получен-
ных из регрессора ω при сигналах управления различной амплитуды (5.3).
34
||q||-(g~NE = 1)
3,5
3,0
2,5
2,0
UB
1,5
1,0
0,5
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
t, c
~
||q||-(gNE = 10)
3,5
3,0
10-3
3
UB
2,5
2
2,0
1,5
1
1,0
0
0,5
0
1
2
3
t, c
0
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
t, c
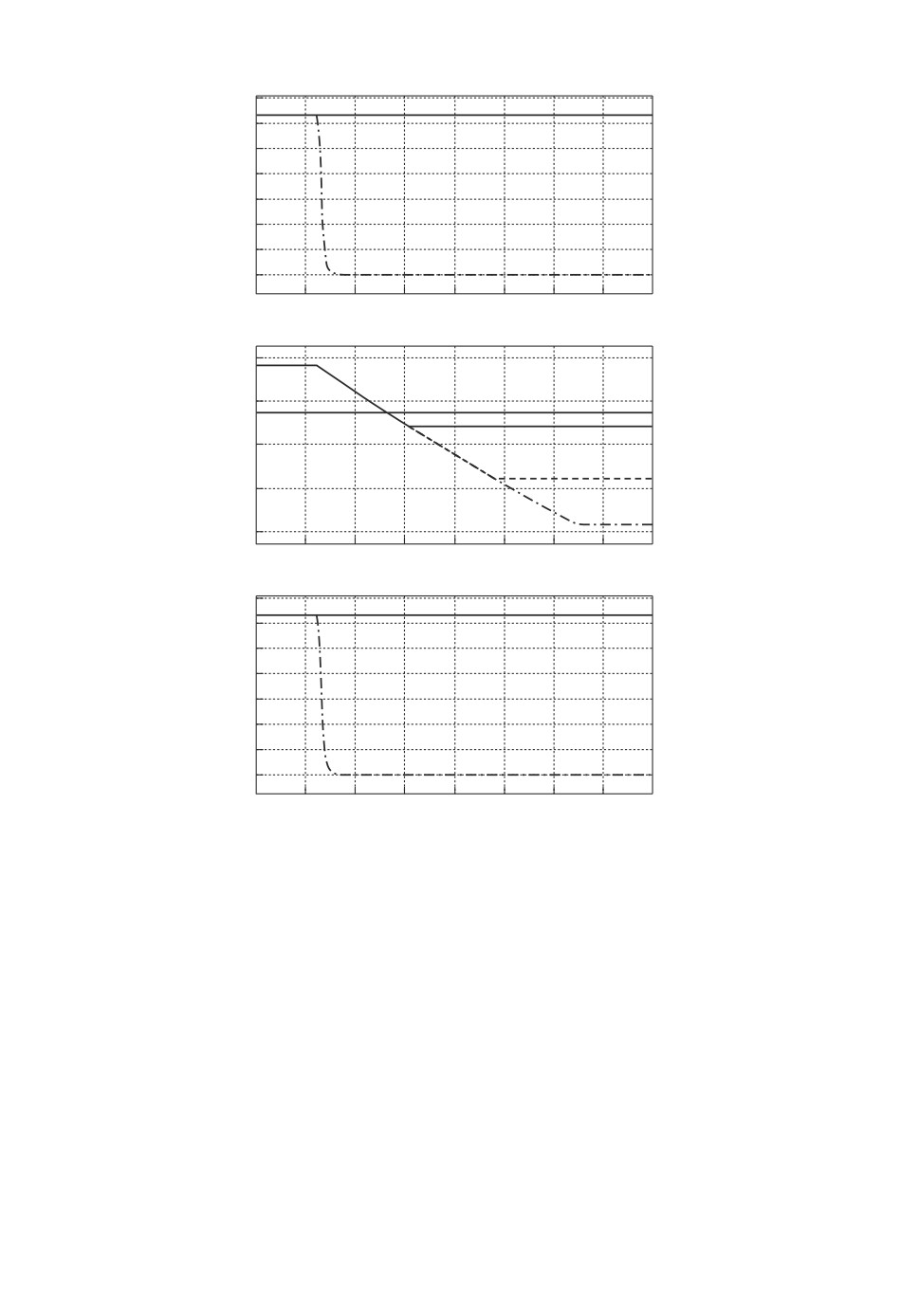
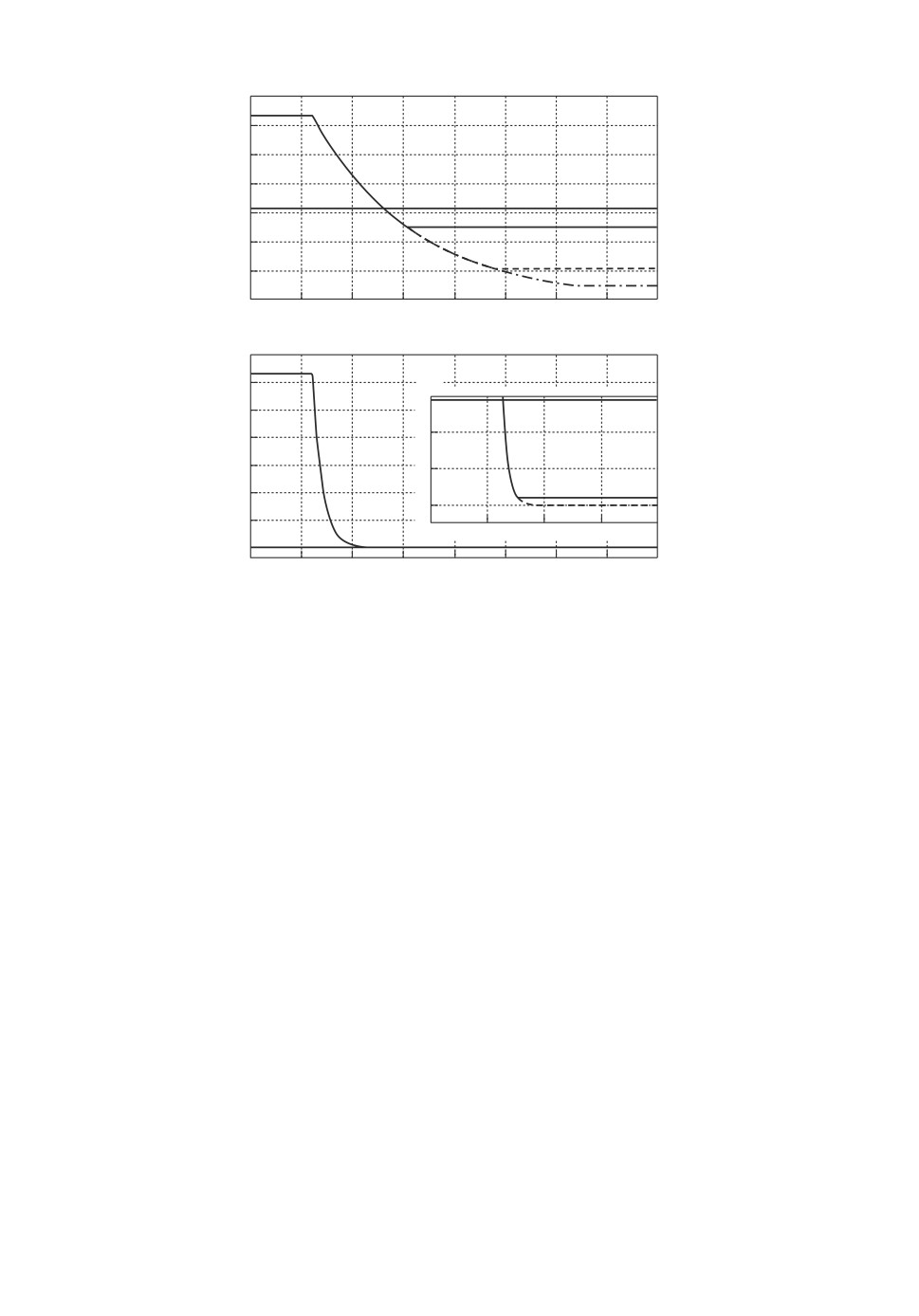
Рис. 3. Нормы параметрической ошибки контура (3.7) при различных γ
(сплошная линия u = 1, штриховая линия u = 10, штрихпунктирная ли-
ния u = 100, UB Ultimate Bound (верхняя граница)).
Приведенные на рис. 1 переходные процессы подтверждают выводы, сде-
ланные в утверждениях, и в терминах утверждения 3 позволяют определить
величину Δmin ∈ (0; 0,88].
На рис. 2 приведено сравнение переходных процессов по
θ,полученных
при применении контуров оценки (2.8), (3.7) и (4.1). На графике нормы пара-
метрической ошибки разработанного контура оценки (3.7) также приводится
верхняя оценка (UB), рассчитанная по формуле (3.12) при Δmin = 0,7 и ts =
= 0 с.
Как следует из рис. 2, разработанный контур оценки, в отличие от (2.8)
и (4.1), позволяет не допускать ситуаций, когда для одних регрессоров
θ(t → ∞)→
θ(t0), а для других
θ(t → ∞)→ 0, что и является
основным результатом статьи.
Далее промоделируем разработанный контур оценки (3.7) при различных
управляющих воздействиях (5.3) и различных значениях коэффициента уси-
ления γ.
Результаты данного эксперимента показывают, что выбор коэффициен-
та γ в (3.7) позволяет корректировать верхнюю оценку параметрической
шибки и ри том н допускать сиуаций, кога для одних регрессоров
θ(t → ∞)
→
θ(t0)
, а для других
θ(t → ∞)
→ 0.
35
6. Заключение
Для идентификации параметров линейных динамических объектов в раз-
личных режимах работы без перевыбора коэффициента усиления контура
оценки в исследовании была разработана процедура нормализации возбуж-
дения регрессора. Предложенная процедура может оказаться полезной при
оффлайн идентификации интервальных моделей промышленных объектов
управления, функционирующих по технологическим ступеням уставок.
Так как в данной статье влияние шумов измерения на полученные ре-
зультаты было отмечено кратко (см. замечание 3 и 4), то в дальнейших ра-
ботах планируется более подробно исследовать свойства разработанной нор-
мализации в условиях их наличия. Также в следующих работах планиру-
ется использование предложенного подхода для нормализации возбуждения
интегрально-растущего регрессора в процедуре [21].
ПРИЛОЖЕНИЕ
Доказательство утверждения 1. При |ω| > ωmin регрессор ϕ = 1
по определению в (3.3). В противном случае |ω| ω-1min ≤ 1, откуда следует при-
надлежность ϕ отрезку [0; 1], что и требовалось доказать.
Доказательство утверждения 2. Для доказательства утвержде-
ния выпишем из (3.3) выражение для регрессора ϕ:
ω
(Π.1)
ϕ=
f (ω)
Выражая из (П.1) ω2 и подставляя полученное выражение в определение
(2.11), имеем:
∫
∫
(Π.2)
ω2 (τ) dτ =
f2 (ω (τ))ϕ2
(τ)dτ ≥ α.
ts
ts
Откуда при |ω| ≤ ωmin с учетом (3.1) и (3.2) непосредственно следует ниж-
няя оценка в (3.5). Также, пользуясь теоремой об оценке определенного ин-
теграла и учитывая ϕ ∈ [0; 1], из (П.2) имеем верхнюю оценку в (3.5).
В случае |ω| > ωmin из (П.1) можем получить:
∫
∫
ω2
(τ)
(Π.3)
dτ =
ϕ2
(τ) dτ.
f2 (ω (τ))
ts
ts
Пользуясь формулой Лейбница и учитывая ϕ = 1 при |ω| > ωmin, из (П.3)
нетрудно получить равенство:
∫
∫
ω2
(τ)
(Π.4)
dτ =
ϕ2
(τ) dτ = T.
f2 (ω (τ))
ts
ts
36
Так как T > 0 по условию конечного возбуждения, то в (П.4) всегда су-
ществует некоторое 0 < Δ ≤ T такое, что верно неравенство (3.6). Поскольку
T одинакова для всех регрессоров класса (2.11), то величина Δ также может
быть принята одинаковой ∀ωj, для которых верно |ωj| > ωmin, что завершает
доказательство утверждения 2.
Доказательство утверждения 3. Условие конечного возбужде-
ния для регрессора ϕ может быть записано в эквивалентном виде:
∫
∫
∫
∫
ϕ2 (τ)dτ =
ϕ2 (τ)dτ +
ϕ2 (τ)dτ +
ϕ2 (τ)dτ ≥
ts
ts
ts+tj
ts+Tj
(Π.5)
∫
≥
ϕ2 (τ)dτ.
ts+tj
В силу |ωj| > ωmin на интервале [ts+tj; ts + Tj ], по доказанному в утвер-
ждении 2, для нижней оценки в (П.5) имеем:
∫
(Π.6)
ϕ2 (τ)dτ = Tj - tj.
ts+tj
Поскольку по условию утверждения tj ∈ (0; T ), а Tj ∈ (tj; T ), то существует
момент времени Δmin, такой, что:
(Π.7)
0 < Δmin ≤ min{Tj - tj} ≤ Tj - tj
<T.
j≥0
Учитывая неравенства (П.5), (П.6) и (П.7), имеем нижнюю оценку в (3.11).
Для получения верхней оценки в (3.11) запишем с учетом утверждения 2
оценку сверху на первое и третье слагаемое в равенстве (П.5):
∫
ϕ2 (τ)dτ ≤ tj;
ts
(Π.8)
∫
ϕ2 (τ) dτ ≤ T - Tj.
ts+Tj
Складывая верхние оценки (П.6) и (П.8), имеем верхнюю оценку в (3.11),
что вместе с полученной нижней оценкой в (П.5) позволяет записать нера-
венство (3.11) в полном виде. С помощью оценки (3.11) нетрудно получить
оценку (3.12) на решение (3.8), что завершает доказательство утверждения 3.
37
СПИСОК ЛИТЕРАТУРЫ
1.
Льюнг Л. Идентификация систем. Теория для пользователя. М.: Наука, 1991.
2.
Narendra K.S., Annaswamy A.M. Persistent Excitation in Adaptive Systems // Int.
J. Control. 1987. V. 45. No. 1. P. 127-160.
3.
Holtz J. Sensorless Control of Induction Machines - With or without Signal Injec-
tion? // IEEE Trans. Industr. Electronics. 2006. V. 53. No. 1. P. 7-30.
4.
Wang J., Efimov D., Aranovskiy S., Bobtsov A. Fixed-time Estimation of Parameters
for Non-persistent Excitation // Eur. J. Control. 2020. V. 55. P. 24-32.
5.
Wang J., Efimov D., Bobtsov A. On Robust Parameter Estimation in Finite-time
without Persistence of Excitation // IEEE Trans. Automat. Control. 2019. V. 65.
No. 4. P. 1731-1738.
6.
Ortega R., Bobtsov A., Nikolaev N. Parameter Identification with Finite-Convergence
Time Alertness Preservation // IEEE Control Syst. Lett. 2021. P. 1-6.
7.
Chowdhary G., Mühlegg M., Johnson E. Exponential Parameter and Tracking Error
Convergence Guarantees for Adaptive Controllers without Persistency of Excita-
tion // Int. J. Control. 2014. V. 87. No. 8. P. 1583-1603.
8.
Cho N., Shin H., Kim Y., Tsourdos A. Composite Model Reference Adaptive Con-
trol with Parameter Convergence under Finite Excitation // IEEE Trans. Automat.
Control. 2017. V. 63. No. 3. P. 811-818.
9.
Lee H.I., Shin H.S., Tsourdos A. Concurrent Learning Adaptive Control with Direc-
tional Forgetting // IEEE Trans. Automat. Control. 2019. V. 64. No. 12. P. 5164-
5170.
10.
Aranovskiy S., Bobtsov A., Ortega R., Pyrkin A. Performance Enhancement of Pa-
rameter Estimators via Dynamic Regressor Extension and Mixing // IEEE Trans.
Automat. Control. 2016. V. 62. No. 7. P. 3546-3550.
11.
Bobtsov A., Pyrkin A., Ortega R., Vedyakov A. A State Observer for Sensorless
Control of Magnetic Levitation Systems // Automatica. 2018. V. 97. P. 263-270.
12.
Ortega R., Bobtsov A., Nikolaev N., Schiffer J., Dochain D. Generalized Parameter
Estimation-based Observers: Application to Power Systems and Chemical-biological
Reactors // arXiv preprint arXiv:2003.10952. 2020. P. 1-13.
13.
Ortega R., Gromov V., Nuno E., Pyrkin A., Romero J. Parameter Estimation of
Nonlinearly Parameterized Regressions without Overparameterization: Application
to Adaptive Control // Automatica. 2021. V. 127. P. 109544.
14.
Glushchenko A., Petrov V., Lastochkin K. Regression Filtration with Resetting to
Provide Exponential Convergence of MRAC for Plants with Jump Change of Un-
known Parameters // arXiv preprint arXiv:2102.10359. 2021. P. 1-12.
15.
Ioannou P., Sun J. Robust Adaptive Control. N.Y.: Dover, 2013.
16.
Sastry S., Bodson M. Adaptive Control - Stability, Convergence, and Robustness.
N.J.: Prentice Hall, 1989.
17.
Schatz S.P., Yucelen T., Gruenwal B., Holzapfe F. Application of a Novel Scalabil-
ity Notion in Adaptive Control to Various Adaptive Control Frameworks // AIAA
Guidance, Navigation, and Control Conf. 2015. P. 1-17.
18.
Aranovskiy S., Belov A., Ortega R., Barabanov N., Bobtsov A. Parameter Identifi-
cation of Linear Time-invariant Systems Using Dynamic Regressor Extension and
Mixing // Int. J. Adaptive Control Signal Process. 2019. V. 33. No. 6. P. 1016-1030.
38
19. Yi B., Ortega R. Conditions for Convergence of Dynamic Regressor Extension and
Mixing Parameter Estimator Using LTI Filters // arXiv preprint arXiv:2007.15224.
2020. P. 1-6.
20. Aranovskiy S., Ushirobira R., Korotina M., Vedyakov A. On Preserving-Excitation
Properties of a Dynamic Regressor Extension Scheme // INRIA Int. Report. 2019.
P. 1-6.
21. Глущенко А.И., Петров В.А., Ласточкин К.А. I-DREM: ослабление условия
квадратичной интегрируемости // АиТ. 2021. № 7. С. 147-165.
Glushchenko A.I., Petrov V.A., Lastochkin K.A. I-DREM: Relaxing the Square In-
tegrability Condition // Autom. Remote Control. 2021. V. 82. P. 1233-1247.
Статья представлена к публикации членом редколлегии А.А. Бобцовым.
Поступила в редакцию 19.04.2021
После доработки 21.06.2021
Принята к публикации 29.08.2021
39