Автоматика и телемеханика, № 1, 2022
Нелинейные системы
© 2022 г. А.С. АНТИПОВ (scholess18@mail.ru),
С.А. КРАСНОВА, д-р техн. наук (skrasnova@list.ru),
В.А. УТКИН, д-р техн. наук (viktorutkin013@gmail.com)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
СИНТЕЗ ИНВАРИАНТНЫХ НЕЛИНЕЙНЫХ ОДНОКАНАЛЬНЫХ
СИСТЕМ СЛЕЖЕНИЯ С СИГМОИДАЛЬНЫМИ ОБРАТНЫМИ
СВЯЗЯМИ С ОБЕСПЕЧЕНИЕМ ЗАДАННОЙ ТОЧНОСТИ СЛЕЖЕНИЯ1
Для нелинейных одноканальных объектов управления, математиче-
ская модель которых представима в треугольной форме вход - выход,
рассматривается задача слежения в условиях внешних и параметриче-
ских возмущений. В рамках блочного подхода разработана декомпози-
ционная процедура синтеза нелинейной обратной связи, обеспечивающая
отслеживание выходной переменной целевого сигнала с заданной точно-
стью за заданное время. Формализован новый тип сигмоидальных ло-
кальных связей из класса гладких и всюду ограниченных S-образных
функций, обеспечивающих инвариантность по отношению к неконтроли-
руемым ограниченным возмущениям, не принадлежащим пространству
управления, без предположений об их гладкости. Приведены результа-
ты моделирования разработанных алгоритмов для системы управления
перевернутым маятником.
Ключевые слова: нелинейная SISO система, слежение, декомпозиция, ин-
вариантность, сигма-функция, перевернутый маятник.
DOI: 10.31857/S0005231022010032
1. Введение
Базовой проблемой теории автоматического управления является задача
слежения, при решении которой нужно обеспечить в замкнутой системе от-
работку выходными переменными целевых допустимых сигналов с заданны-
ми показателями переходных и установившихся процессов. Основные усилия
специалистов направлены на решение этой задачи применительно к объек-
там, функционирующим при действий внешних неконтролируемых возмуще-
ний. Наиболее разработанным является случай, когда аффинные внешние
возмущения действуют в пространстве управления, т.е. условия согласования
(англ. “matching conditions”) выполнены [1]. По отношению к согласованным
возмущениям можно обеспечить инвариантность всего вектора состояния как
1 Работа выполнена при частичной финансовой поддержке Российского фонда фунда-
ментальных исследований (проект № 20-01-00363А).
40
с помощью динамической, так и статической обратной связи. В первом слу-
чае предварительно нужно получить оценки внешних возмущений с помощью
динамического компенсатора или наблюдателя возмущений (см., например,
[1-6]) и компенсировать их действие с помощью комбинированного управле-
ния. Во втором случае для подавления внешних ограниченных возмущений
используются “силовые” методы: глубокие обратные связи или разрывные
управления с организацией скользящего режима [7-9].
Наибольшую сложность представляют объекты с несогласованными воз-
мущениями, которые нельзя непосредственно компенсировать или подавить
с помощью истинного управления. В задаче слежения к таким возмущени-
ям относятся также производные целевых сигналов. Поэтому задача обеспе-
чения инвариантности по отношению к возмущениям ставится только для
регулируемых выходов (ошибок слежения), а остальные переменные вы-
нуждены отрабатывать соответствующие внешние воздействия. Для синтеза
следящей системы в предположении о гладкости внешних и параметриче-
ских возмущений используют генераторы задающих и возмущающих воздей-
ствий, наблюдатели возмущений, регрессоры и идентификаторы параметров
[1, 10-12]. При этом динамический порядок замкнутой системы увеличивает-
ся в несколько раз по сравнению с размерностью модели объекта управления.
Кроме того, построение адекватных динамических моделей внешних воздей-
ствий достаточно проблематично, если они меняются в процессе эксплуатации
или недостаточно гладкие. Примером могут служить ударные нагрузки и си-
лы сухого трения при управлении электромеханическими объектами [13-15].
В частном случае, когда негладкое возмущение отделено от истинного управ-
ления одним интегратором, можно подавить его с помощью “вихревого” ста-
тического управления с непрерывной и разрывной составляющими. Результат
достигается за счет организации в системе колебательного переходного про-
цесса, при котором часть переменных состояния автоматически компенсирует
влияние неизвестных слагаемых [16].
В общем случае для обеспечения инвариантности ошибок слежения по от-
ношению к несогласованным возмущениям, которые не подлежат дифферен-
цированию, целесообразно использовать локальные связи специального вида
и блочный принцип управления как методологическую основу для их реа-
лизации. При решении задачи слежения в рамках блочного подхода [17-22]
уравнения внешней динамики приводятся к блочной форме вход-выход с аф-
финным вхождением фиктивных и истинных управлений. Она состоит из
элементарных блоков, в каждом из которых размерность управляемых пере-
менных равна рангу матрицы перед фиктивными управлениями, в качестве
которых используются переменные следующего блока. Последовательно фор-
мируемые стабилизирующие локальные связи в каждом блоке в итоге обеспе-
чиваются выбором истинного управления. Внешние возмущения при блочной
организации являются согласованными с фиктивными управлениями. Как
было отмечено, классическими методами подавления внешних и параметри-
ческих ограниченных возмущений, действующих в пространстве управления,
являются: 1) непрерывные линейные обратные связи с большими коэффици-
41
ентами усиления; 2) ограниченные по модулю разрывные управления с ор-
ганизаций скользящих режимов. При этом только управления первого типа
(в силу гладкости) можно использовать для формирования локальных свя-
зей. Применению глубоких обратных связей на практике препятствует из-
вестная проблема всплесков в начале переходных процессов [23-24], на ве-
личину которых в практических приложениях накладываются ограничения.
Гибридом линейного и разрывного управлений является кусочно-линейное
управление с насыщением в виде sat-функции [25-26], которое сочетает в себе
положительные свойства обоих методов, но свободно от их недостатков. С по-
мощью ограниченного и непрерывного sat-управления в замкнутой системе
обеспечиваются свойства, близкие к свойствам систем с разрывными управле-
ниями, функционирующим в скользящем режиме. Негладкость sat-функции
не является препятствием для ее использования в истинном управлении и
в корректирующих воздействиях наблюдателей состояния [5, 18], но сужает
возможности ее применения для синтеза фиктивных управлений в практиче-
ских задачах.
Для универсального формирования инвариантных локальных связей
требуются гладкие аналоги sat-функции
трансцендентные S-образные
функции (арктангенс, гиперболический тангенс, логистическая функция и
т.п.). Конструктивным инструментом для анализа и синтеза нелинейного
управления представляется нечетный гиперболический тангенс th(x) = 1-
-2/(exp(2x) + 1), он зависит от экспоненты, его производные всюду огра-
ничены и рекурсивно выражаются через первообразную. В данной работе
используется более удобная для построений модификация гиперболического
тангенса сигма-функция σ(x) = -th(-x/2).
Заметим, что с помощью сигма-функций можно с любой точностью ап-
проксимировать любую ограниченную функцию с конечным числом разры-
вов. Это свойство используется в задачах нейросетевого обучения, где сиг-
моиды служат функциями активации нейронов: из набора сигмоидов фор-
мируется нейронный слой, выходом которого является их линейная комби-
нация. Вычисление параметров нейронной сети (весовых коэффициентов и
смещений) происходит в процессе обучения по заранее известной обучающей
выборке (англ. “data set”) с целью минимизации функции потерь, в каче-
стве которой выступает среднеквадратическая ошибка между целевыми зна-
чениями обучающей выборки и выходом нейронной сети. После завершения
процесса обучения нейронная сеть применяется к новым данным и позволя-
ет прогнозировать целевые значения на основе настроенных при обучении
параметров [27].
В данной работе сигма-функции используются непосредственно в контуре
обратной связи в качестве фиктивных и истинных управлений. Параметры
регулятора выбираются на этапе синтеза исходя из наихудших допустимых
значений параметров объекта управления и границ изменения внешних воз-
действий. В процессе регулирования сигмоидальные фиктивные и истинные
управления за конечное время сходятся к согласованным с ними неизвестным
сигналам и повторяют их форму с наперед заданной точностью. При этом
42
автоматически реализуется механизм компенсации возмущений, в том чис-
ле не принадлежащих пространству истинного управления, что и обеспечи-
вает инвариантность выходных переменных. Таким образом, предлагаемый
метод принципиально отличается от способа использования сигмоидальных
функций в задачах нейросетевого управления, где параметры регулятора на-
страиваются по заранее известной обучающей выборке, при формировании
которой требуется предусмотреть все возможные модификации регулируемо-
го процесса [28].
Апробация сигмоидальных обратных связей в задачах наблюдения [3, 17],
а также в задачах управления применительно к различным мехатронным
объектам [15, 29-32] показала несомненное преимущество этого подхода
по сравнению с линейной обратной связью с большими коэффициентами.
К недостаткам метода можно отнести более сложную вычислительную реали-
зацию, но с учетом постоянно наращиваемой мощности современных управ-
ляющих микропроцессоров это не является серьезным препятствием для его
использования в системах управления современными и перспективными тех-
ническими объектами.
В данной работе блочный принцип управления с сигмоидальными обрат-
ными связями формализован для решения задачи слежения применитель-
но к нелинейным одноканальным системам треугольного вида произволь-
ной размерности, функционирующих в условиях параметрических и внешних
несогласованных возмущений (без предположений об их гладкости). Обратим
внимание, что динамические генераторы внешних воздействий в построения
не вводятся; в оценивании параметрических и внешних возмущений нет необ-
ходимости. Задача рассматривается в детерминированной постановке: пола-
гается, что весь вектор состояния объекта управления измеряется, шумы в
измерениях отсутствуют.
Работа имеет следующую структуру. В разделе 2 приводятся базовые све-
дения о сигма-функции и ее применении для синтеза инвариантной элемен-
тарной системы; описывается математическая модель объекта управления,
формулируется постановка задачи слежения. В разделе 3 представлен основ-
ной результат: формализованы достаточные условия и разработана декомпо-
зиционная процедура синтеза параметров сигмоидальных обратных связей
на основе иерархических неравенств, обеспечивающих стабилизацию ошибки
слежения с заданной точностью за заданное время. В разделе 4 приведены
результаты численного моделирования разработанных алгоритмов для систе-
мы управления перевернутым маятником.
2. Описание проблемы
2.1. Особенности сигмоидальной обратной связи
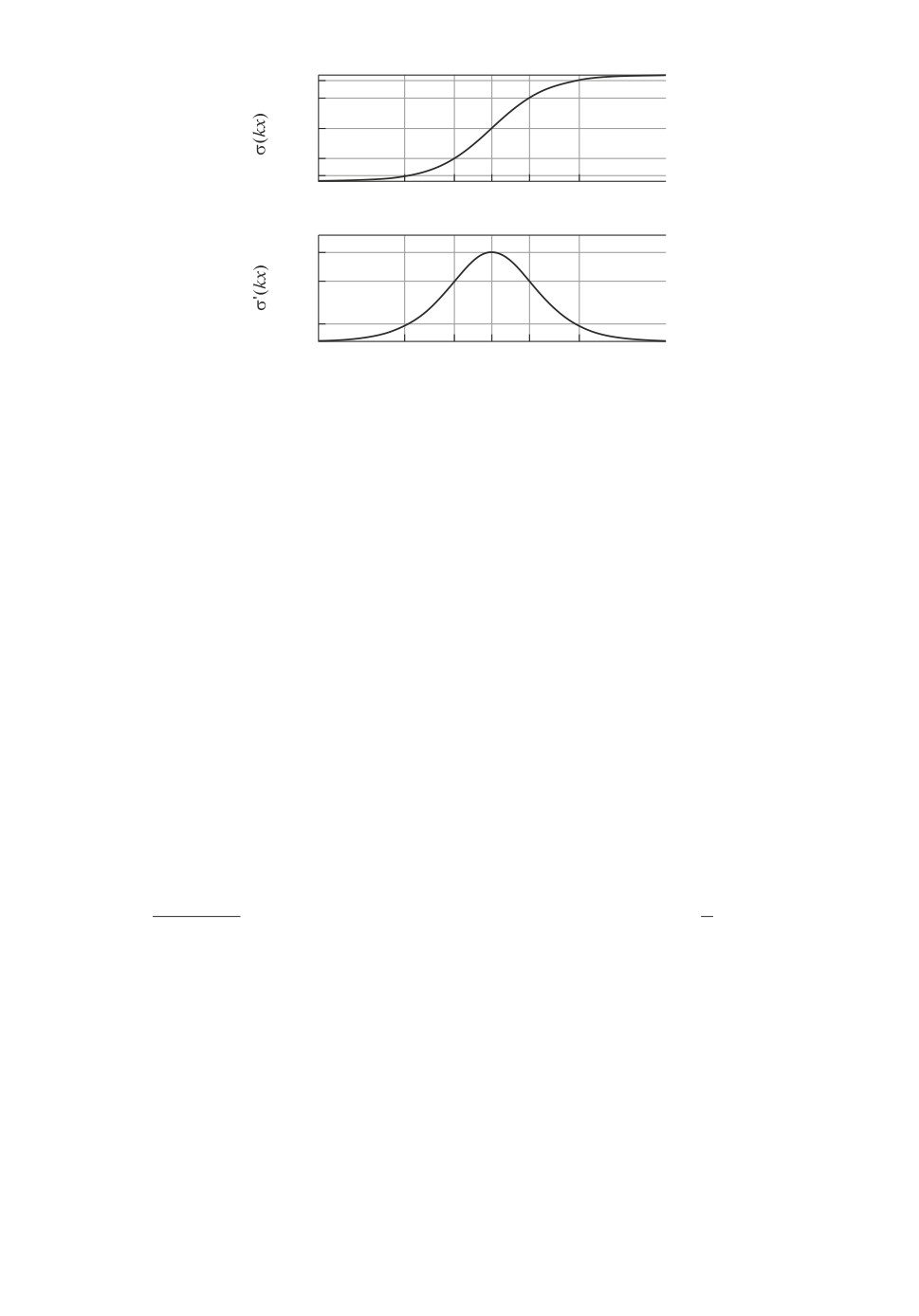
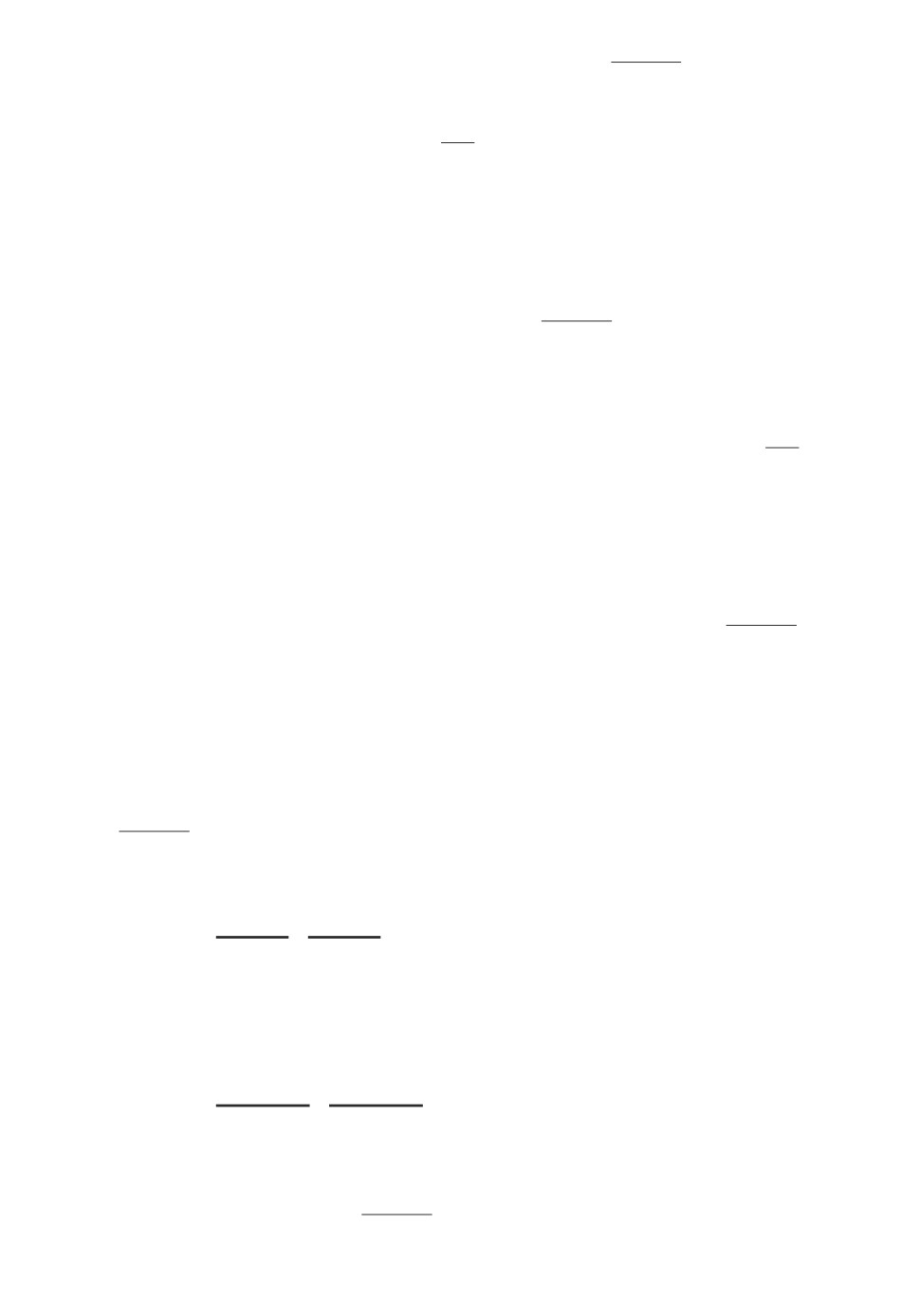
Рассмотрим гладкую и ограниченную сигма-функцию
2
σ(kx) =
- 1, k = const > 0,
1 + exp(-kx)
43
1,00
0,90
0,57
0
-0,57
-0,90
-1,00
-3/k
-1,3/k
0
1,3/k
3/k
x
0,50k
0,34k
0,10k
0
-3/k
-1,3/k
0
1,3/k
3/k
x
Рис. 1. Графики сигма-функции (сверху) и ее производной (снизу).
которая определена на всей числовой оси и имеет следующие свойства:
σ(-kx) = -σ(kx), σ(kx) ∼
kx/2, σ(kx)
∼ sign(x).
x→0
k→+∞
В аргументе специально выделен множитель k, который в дальнейших по-
строениях играет роль большого коэффициента усиления в малой окрестно-
сти нуля. Производная сигма-функции имеет рекурсивный вид:
σ′(kx) = k(1 - σ2(kx))/2 > 0, x ∈ R, σ′(-kx) = σ′(kx).
Для упрощения анализа нелинейной сигма-функции установим ее анало-
гию с кусочно-линейной sat-функцией. Рассмотрим некоторую окрестность
нуля с радиусом Δ > 0. Для сигма-функции и ее производной в указанных
интервалах справедливы следующие оценки:
σ(kΔ) < |σ(kx)| < 1,
0 < σ′(kx) < σ′(kΔ),
|x| > Δ;
(2.1)
σ(kΔ) |x|
k
≤ |σ(kx)| ≤ σ(kΔ), σ′(kΔ) ≤ σ′(kx) ≤ σ′(0) =
,
|x| ≤ Δ.
Δ
2
Неравенства (2.1) демонстрируют, что при |x| > Δ сигма-функция близка к
постоянной, а при |x| ≤ Δ
к линейной функции (см. рис. 1). Для фор-
мализации абсцисс указанного разделения введем параметр c = const > 0:
|x| = Δ = c/k, который целесообразно выбирать из интервала
(2.2)
kΔ = c ∈ [1,3; 3],
где: ±1,3
абсциссы точек перегиба первой производной σ′′′(±1,3) = 0,
при этом σ(±1,3) ≈ ± 0,57, σ′(±1,3) ≈ 0,34k; ± 3 абсциссы вершин сигма-
функции, в которых ее кривизна достигает максимума, при этом σ(±3) ≈
≈ ± 0,9, σ′(±0,9) ≈ 0,095k [17].
44
Поясним идею использования сигмоидальной обратной связи и выбора ее
параметров в задаче обеспечения инвариантности на примере элементарной
возмущенной системы
(2.3)
x = f(t) + u,
где x ∈ R - измеряемая переменная состояния, f(t) - внешнее возмущение, ко-
торое описывается детерминированной, неизвестной, но ограниченной функ-
цией времени, требование гладкости к ней не предъявляется, достаточно, что-
бы она была кусочно-непрерывная. Переменную системы (2.3) можно трак-
товать как ошибку слежения, тогда f(t) аддитивно включает производную
задающего воздействия.
Ставится задача стабилизации системы (2.3) с помощью статической об-
ратной связи. Управляющее воздействие u сформируем в виде сигма-функ-
ции
(2.4)
u = -mσ(kx)
с постоянной амплитудой m = const > 0.
Лемма. Если в системе (2.3), (2.4) внешнее возмущение ограничено из-
вестной константой |f(t)| ≤ F = const > 0, t ≥ 0, то тогда для любых сколь
угодно малых Δ > 0, T > 0 и любого начального условия x(0) найдутся та-
кие положительные действительные числаk и m, что при любых k ≥k,
m ≥ m выполнится неравенство
(2.5)
|x(t)| ≤ Δ, t ≥ T.
Доказательство леммы. Заданное Δ > 0 (2.5) и коэффициент k свя-
жем параметрически (2.2), что сводит проблему выбора k к выбору c из ука-
занного диапазона.
Формализуем для замкнутой системы (2.3), (2.4) достаточные условия
устойчивости: введем функцию Ляпунова V = x2/2 и оценим ее производ-
ную. Вне области |x| ≤ Δ с учетом (2.1)-(2.2) имеем:
(2.6)
V
= x(f(t) - mσ(kx)) ≤ |x| (F - mσ(c)).
V
Из (2.6) следует, что неравенство
≤ |x| (F - mσ(c)) < 0 справедливо, если
(2.7)
m>m∗
= F/σ(c).
Выполнение (2.7) обеспечивает |x(t)| ≤ Δ без учета времени сходимости,
которое зависит от начального условия. В частном случае |x(0)| ≤ Δ нера-
венство |x(t)| ≤ Δ обеспечивается при (2.7) и t ≥ 0, т.е. цель управления (2.5)
достигается.
В общем случае |x(0)| > Δ для гарантированного достижения переменной
состояния заданной области за заданное время T > 0 повысим нижнюю
границу для выбора амплитуды (2.7). С учетом оценки решения системы (2.3)
45
на интервале t ∈ [0; T ]
|x(t)| ≤ |x(0)| + (F - mσ(c))T ≤ Δ, t ≥ T
получим
(
)
1
|x(0)| - Δ
(2.8)
m≥ m=
+F
>m∗
,
|x(0)| > Δ.
σ(c)
T
Таким образом, принятое значение c (2.2) определяет m (2.8) иk
(2.9)
k≥k
= c/Δ,
отвечающие цели управления (2.5) при любом x(0). Выбор амплитуды m
управления (2.4) на основе неравенства (2.8) гарантирует попадание пере-
менной состояния системы (2.3) из любого начального условия в окрестность
нуля за заданное время (и чем больше m, тем быстрее). Если переменная
изначально находится в этой области, то гарантированно не покинет ее в
процессе регулирования. Выбор большого коэффициента k на основе (2.9)
обеспечивает заданный радиус этой окрестности (и чем больше k, тем мень-
ше радиус). Лемма доказана.
Замечание 1. В процессе доказательства леммы 1 формализованы до-
статочные условия (2.8), (2.9), гарантирующие выполнение целевых показа-
телей (2.5). Однако предельный радиус окрестности нуля, достигаемой пе-
ременной x(t) в стационарном режиме, будет несколько меньше заданного
Δ > 0. Действительно, при t ≥ T для замкнутой системы (2.3), (2.4) оценка
производной функции Ляпунова (2.6) в силу (2.1) имеет вид
V
= x(f(t) - mσ(kx)) ≤ |x|(F - mσ(c)|x|/Δ).
НеравенствоV < 0 справедливо вне области
F
(2.10)
|x| ≤ Δ
< Δ,
mσ(c)
к которой асимптотически стремится x(t) и которая в силу (2.8) меньше за-
данной (2.5). Ее радиус сокращается с ростом амплитуды m.
Тем не менее на практике целесообразно выбирать k и m как можно ближе
к базовым значениям k (2.9) и m (2.8) в целях экономии ресурса управления.
Рассмотрим вопрос о выборе параметра c из указанного диапазона (2.2).
Принимая во внимание последующее использование сигма-функций для син-
теза локальных связей в многомерных системах, в качестве критерия выбора
примем минимум базовой оценки модуля скорости управления. Для замкну-
той системы (2.3) имеют место следующие выражения:
u(t) = -mk(1 - σ2(kx)) x/2;
0 < 1 - σ2(kx) ≤ 1, x ∈ R;
| x(t)| < F + m < 2m, t ≥ 0.
46
Отсюда с учетом (2.8), (2.9) следует базовая оценка скорости изменения
управления:
(
)2
c
|x(0)| - Δ
(2.11)
| u(t)| < m2k, t ≥ 0, m2k ≥ m2(c)k(c) =
+F
σ2(c)Δ
T
Из (2.11) при фиксированных значениях Δ, |x(0)|, T, F имеем целевое
условие:
c
(2.12)
y(c) =
→ min, c > 0.
σ2(c)
Исследуем на экстремумы функцию (2.12). Ее производная имеет вид
(1 + ec)(e2c - 4cec - 1)
y′ =
,
(ec - 1)3
из уравнения y′ = 0 ⇒ e2c - 4cec - 1 = 0 численно находим стационарную
точку c ≈ 2,17. На интервале c ∈ (0; 2,17) функция убывает (y′ < 0), на интер-
вале c ∈ (2,17; +∞) возрастает (y′ > 0), следовательно, c ≈ 2,17 ∈ [1,3; 3]
точка минимума. Для удобства расчетов положим
1
(2.13)
c= 2,2; σ(c) ≈ 0,8;
≈ 1,25.
σ(c)
В принятой точке y(2,2) ≈ 3,43322, что практически не отличается от мини-
мального значения функции y(2, 17) ≈ 3,43299. Тогда с учетом (2.13) оценки
(2.1) примут следующий вид:
(2.14)
0,8 < |σ(kx)| < 1,
0<σ′
(kx) < 0,18k,
|x| > c/k,
c= 2,2;
0,8k |x|
k
= 0,36k |x| ≤ |σ(kx)| ≤ 0,8,
0,18k ≤ σ′(kx) ≤ σ′(0) =
,
|x| ≤ c/k.
c
2
Замечание 2. В элементарной возмущенной системе (2.3) с помощью
сигмоидального управления обеспечивается монотонный переходный про-
цесс и |x(t)| ≤ x = max{|x(0)| , Δ}, t ≥ 0, что позволяет расширить класс
рассматриваемых элементарных систем за счет систем вида
(2.15)
x = f1(x) + f2
(t) + b(x, t)u,
где значения f1(x) точно не известны, требование ограниченности на всей
области определения к данной функции не предъявляется, достаточно вы-
полнения условия |f1(x)| ≤ F1 = const > 0 при |x| ≤ x + ε, где ε > 0 любая
малая величина; f2(t) неизвестное ограниченное возмущение |f2(t)| ≤ F2 =
= const > 0 при t ≥ 0. Достаточное условие управляемости системы (2.15)
в сделанных предположениях: b(x, t)
знакопостоянная функция, т.е.
b(x, t) = 0 при |x| ≤ x + ε, t ≥ 0, допускается ее параметрическая неопреде-
ленность, но в указанных интервалах известны ее знак sign(b(x, t)) = const
47
и границы изменения 0 < bmin ≤ |b(x, t)| ≤ bmax. Ко всем функциям системы
(2.15) не предъявляется требование гладкости, достаточно, чтобы они были
кусочно-непрерывными с конечным числом точек разрыва первого рода.
Обозначим: f(x, t) = f1(x) + f2(t), |f(x, t)| ≤ F = F1 + F2 при |x| ≤ x + ε,
t ≥ 0. Управление
u = -sign(b)mσ(kx)
приводит к замкнутой системе
(2.16)
x = f(x,t) - |b(x,t)|mσ(kx).
Зафиксируем большой коэффициент на основе (2.9) с учетом (2.13):
2,2
(2.17)
k≥k=c
=
Δ
Δ
Для замкнутой системы (2.15) при Δ < |x| < x + ε аналогично (2.6), (2.7) име-
ем:
V
= x(f - |b| mσ(kx)) ≤ |x|(F - bminmσ(c)) = |x|(F - 0,8bminm),
(2.18)
0,8bminm > F ⇔ m > 1,25F/bmin ⇒V < 0.
Если |x(0)| ≤ Δ, то выполнение (2.17), (2.18) обеспечит |x(t)| ≤ Δ при t ≥ 0.
В общем случае Δ < |x(0)| < x + ε переменная состояния не выйдет из обла-
сти |x(t)| ≤ x, t ≥ 0, а цель управления (2.5) будет достигнута, если анало-
гично (2.8) амплитуда принята на основе неравенства
)
)
1
(|x(0)| - Δ
1, 25
( |x(0)| - Δ
m≥ m=
+F
=
+F
,
(2.19)
bminσ(c)
T
bmin
T
|x(0)| > Δ.
Приведенные построения далее распространяются на неэлементарные управ-
ляемые системы.
2.2. Описание модели объекта управления. Постановка задачи
В качестве объекта управления рассматривается нелинейная одноканаль-
ная система, функционирующая при действии внешних несогласованных воз-
мущений, математическая модель которой представима в треугольной (по
составу аргументов функций ее подсистем) форме вход-выход:
xi = fi(x1,... ,xi,t) + bi(x1,... ,xi,t)xi+1, i = 1,n - 1,
(2.20)
xn = fn(x1,... ,xn,t) + bi(x1,... ,xn,t)u,
где x = col(x1, . . . , xn) ∈ X ⊂ Rn - измеряемый вектор состояния, X - откры-
тая ограниченная область изменения переменных состояния, определяемая
физикой процесса, границы области допустимых начальных значений пере-
менных x(0) ∈ X заранее известны; x1 ∈ X1 ⊂ R - регулируемая переменная
48
(выход), u ∈ R - управляющее воздействие (вход); fi(x1, . . . , xi, t) - функции
от указанных переменных вектора состояния и внешних возмущений, кото-
рые в общем случае полагаются неизвестными функциями времени, ограни-
ченными по модулю:
(2.21)
|fi(x1(t),... ,xi(t),t)| ≤ Fi
= const > 0, x(t) ∈ X, t ≥ 0, i = 1, n,
характер вхождения параметрических и сигнальных возмущений не принци-
пиален, так как задача их индивидуального оценивания и компенсации не
ставится.
Замечание 3. Константы Fi, i = 1,n (2.21) нужно знать заранее, поэто-
му самый простой вариант предполагать, что функции fi(x1, . . . , xi, t) огра-
ничены по всем указанным аргументам. Конечно, это сильно сужает класс
допустимых систем, из рассмотрения сразу выпадают линейные системы. От-
метим, что предлагаемая далее процедура синтеза всюду ограниченных об-
ратных связей является удобным аналитическим инструментом для обеспече-
ния в процессе регулирования заданных ограничений на переменные состоя-
ния и управления [15]. В данной работе эта проблема не рассматривается. Тем
не менее если функции fi(x1, . . . , xi, t) не ограничены всюду по x1, . . . , xi, то
имеется принципиальная возможность априори для худшего расчетного слу-
чая оценить область изменения переменных состояния X и соответствующие
значения Fi, i = 1, n при x(t) ∈ X (см. замечание 2).
Система (2.20) является управляемой, а именно, bi(x1(t), . . . , xi(t), t) = 0,
x(t) ∈ X, t ≥ 0, i = 1, n [20]. Данные функции могут содержать различ-
ные неопределенности, но при этом известными считаются их знаки
sign(bi(x1(t), . . . , xi(t), t)) = const, t ≥ 0 и диапазоны изменения
0 < bi,min ≤ |bi(x1(t),...,xi(t), t)| ≤ bi,max,
(2.22)
x(t) ∈ X, t ≥ 0, i = 1, n.
Требование гладкости к функциям fi(t), bi(t), i = 1, n (2.20) не предъявля-
ется, достаточно, чтобы они были кусочно-непрерывными с конечным числом
точек разрыва первого рода.
Модель (2.20) без ограничения общности можно рассматривать как одну
из подсистем уравнений внешней динамики многоканальной системы [1, 33].
Под такое описание попадает представительный класс динамических объек-
тов управления, например теплообменные и электромеханические системы
[9, 12-15, 19, 25, 26, 29-32, 34, 35]. Модели ряда других объектов можно пред-
ставить в виде связного набора подсистем типа (2.20) с помощью невырож-
денных замен переменных без задействования в преобразованиях внешних
возмущений.
Для объекта управления (2.20) ставится задача синтеза закона управле-
ния в форме статической обратной связи, обеспечивающего отслеживание
выходной переменной x1(t) заданного допустимого сигнала g(t), который по-
ступает в систему управления в реальном времени из внешнего источника, его
49
аналитическое описание отсутствует, известны только его текущие значения,
области изменения начальных условий и первой производной:
(2.23)
g(t) ∈ G ⊆ X1,
|ġ(t)| ≤ G1
,
t ≥ 0.
В сделанных предположениях задача слежения, а именно стабилизация ошиб-
ки слежения e1(t) = x1(t) - g(t), может быть решена только с некоторой точ-
ностью. Пусть заданы точность стабилизации Δ1 > 0 и время t1 > 0 ее до-
стижения. Цель управления обеспечить в замкнутой системе
(2.24)
|e1(t)| ≤ Δ1, t ≥ t1.
В следующем разделе получены достаточные условия решения поставлен-
ной задачи (2.24) в рамках блочного подхода с использованием сигмоидаль-
ных обратных связей.
3. Декомпозиционная процедура синтеза сигмоидальных обратных связей
с обеспечением заданной точности стабилизации ошибки слежения
Система (2.20) имеет структуру блочной формы управляемости [20-22].
Согласно идеологии блочного принципа управления каждое уравнение си-
стемы (2.20) трактуется как элементарный блок, аналогичный (2.15), отно-
сительно фиктивного или истинного управления. В i-м блоке (i = 1, n - 1)
в качестве фиктивного управления выступает переменная следующего бло-
ка xi+1. Таким образом, неопределенности fi(x1, . . . , xi, t), i = 1, n - 1, кото-
рые не согласованы с истинным управлением, находятся в пространстве со-
ответствующих фиктивных управлений. Чтобы избежать большого перере-
гулирования, характерного для линейных обратных связей с большими ко-
эффициентами, которые стандартно используются для подавления неопреде-
ленностей [22-24, 30], стабилизирующие фиктивные управления предлагается
выбрать в виде гладких и ограниченных сигма-функций:
x∗i = -sign(bi-1)mi-1σ(ki-1ei-1), ki-1, mi-1
(3.1)
= const > 0, i = 2, n,
где e1 - ошибка слежения, ei-1 (i = 3, n + 1) - невязки между переменными xi
и выбранными фиктивными управлениями (3.1):
e1 = x1 - g,
(3.2)
ei = xi - x∗i = xi + sign(bi-1)mi-1σ(ki-1ei-1), i = 2, n.
В замкнутой системе с помощью истинного управления, которое также
для единообразия принимается в виде сигма-функции
(3.3)
u = -sign(bn)mnσ(knen), kn,mn
= const > 0,
требуется обеспечить стабилизацию невязок (3.2), в том числе ошибки сле-
жения e1, что отвечает цели управления (2.24).
50
Перепишем замкнутую систему (2.20), (3.3) относительно невязок (3.2):
ė1 = - |b1|m1σ(k1e1) + f1 - ġ + b1e2;
(3.4)
ėi = - |bi| miσ(kiei) + fi + Λi-1 + biei+1, i = 2,n - 1;
ėn = - |bn|mnσ(knen) + fn + Λn-1,
где слагаемые
ki(1 - σ2(kiei))
(3.5)
Λi = sign(bi)mi
ėi
,
i = 1,n - 1
2
являются производными соответствующих фиктивных управлений (3.1), ко-
торые возникают при переходе к новому координатному базису (3.2).
Для настройки параметров сигмоидальных обратных связей в системе
(3.4) используем блочный подход, в котором реализуется принцип декомпози-
ции [34, 35]. Задача сводится к последовательному решению элементарных за-
дач синтеза в подсистемах (блоках), аналогичных (2.16). Отличие заключает-
ся в том, что только последняя, n-я подсистема регулируется непосредствен-
но истинным управлением, а в остальных в качестве фиктивных управлений
выступают переменные следующего блока. Как следствие, в общем случае
ненулевых начальных значений невязок только в последнем блоке гаранти-
руется монотонный переходный процесс. Формализуем достаточные условия
стабилизации системы (3.4).
Теорема. Если в системе (3.4) выполняются условия (2.21)-(2.23), то
тогда для любых начальных условий x(0) ∈ X и любых, сколь угодно малых
Δ1 > 0, t1 > 0 найдутся такие действительные числаki > 0, i = 1,n, 0 <
< mi < mi, i = 1,n - 1, mn > 0, что при любых ki ≥ ki, mi: mi < mi ≤ mi,
mn ≥ mn неравенство (2.24) выполнится.
В Приложении приведено конструктивное доказательство теоремы, в ходе
которого получена декомпозиционная процедура выбора параметров фиктив-
ных и истинного управлений на основе неравенств, обеспечивающая решение
поставленной задачи (2.24). Заметим, что на стадии проектирования следя-
щей системы в полученные оценки для выбора амплитуд вместо конкретных
значений |xi(0)|, i = 1, n, |g(0)| (2.23) следует подставлять граничные значе-
ния областей допустимых начальных условий соответствующих переменных
состояния.
Для упрощения вычислительной реализации в качестве истинного управ-
ления вместо (3.3) можно также использовать всюду ограниченную, но
негладкую sat-функцию [25, 26].
Замечание 4. Для управления механическими системами часто исполь-
зуют электрические безынерционные исполнительные устройства, построен-
ные на базе силовых электронных элементов, которые могут функциониро-
вать исключительно в ключевом режиме. В этом случае вместе с сигмоидаль-
ными локальными связями (3.2) естественно вместо непрерывного управле-
ния (3.3) использовать закон разрывного управления:
(3.6)
u = -sign(bn)mnsign(en
).
51
Разрывное управление (3.6) имеет один настраиваемый параметр амплиту-
ду, которая выбирается на основе неравенства, аналогичного (Π.22), а именно:
)
1
( |xn(0)| + m∗n-1
(3.7)
mn ≥ mn =
+ Fn + k∗n-1(m∗n-1)2bn-1,max
bn,min
t∗n
При выполнении (3.7) в замкнутой системе (2.20), (3.2), (3.6) за конечное вре-
мя 0 < t∗n < 0,2bn-1,mint∗n-1/bn-1,max < t1 возникнет скользящий режим [7-9].
В теории на поверхности en = 0 в виртуальном пространстве невязок
(e1, . . . , en) ∈ Rn, а в реальности из-за различного рода неидеальностей дви-
жение изображающей точки происходит в пограничном слое поверхности пе-
реключения |en(t)| ≤ Δn, t ≥ t∗n, ширина которого пропорциональна ампли-
туде разрывного управления. При этом неравенства (Π.1), а следовательно,
и цель управления (2.24) обеспечиваются.
Необходимо отметить, что параметры обратной связи в предложенной
процедуре определяются на основе неравенств, составленных для худшего
расчетного случая, что не требует перенастройки регулятора при измене-
нии внутренних и внешних факторов в допустимых пределах. Кроме то-
го, показана принципиальная возможность в рамках предложенного подхо-
да обеспечить любую, сколь угодно малую ошибку слежения с любым, до-
статочно малым перерегулированием (Π.11) за любое, сколь угодно малое
время при любых начальных условиях. Но эти построения имеют больше
теоретическую значимость, поскольку уменьшение показателей цели управ-
ления (2.24), (Π.11) обернется ростом параметров регулятора. Это может
привести к избыточным величинам фиктивных и истинных управлений в
переходном процессе, недопустимым в реальных системах автоматического
управления.
Замечание 5. При использовании разработанной в доказательстве тео-
ремы процедуры настройки в практических приложениях рекомендуется
фиксировать коэффициенты обратной связи как можно ближе к нижним
базовым границам. Учитывая консервативность полученных оценок, мож-
но несколько завышать целевые показатели (2.24) при выполнении расчетов,
так как реально в установившемся режиме будет достигаться меньшая ошиб-
ка слежения (2.10) и/или меньшее время регулирования (см. раздел 4).
Обратим внимание, что в силу организации локальных обратных связей
(3.1) в замкнутой системе (2.20), (3.6) переменные состояния xi(t), i = 2, n
будут “отслеживать” ограниченные сигмоидальные сигналы, при этом мак-
симальные отклонения фиктивных управлений от “задающих воздействий”
ограничены (Π.6), а точность слежения будет зависеть от задаваемой точ-
ности стабилизации невязок (3.2) (“ошибок слежения”). Этот факт является
предпосылкой для использования данного подхода при решении задачи сле-
жения в условиях проектных ограничений на переменные состояния и управ-
ления.
4. Результаты моделирования
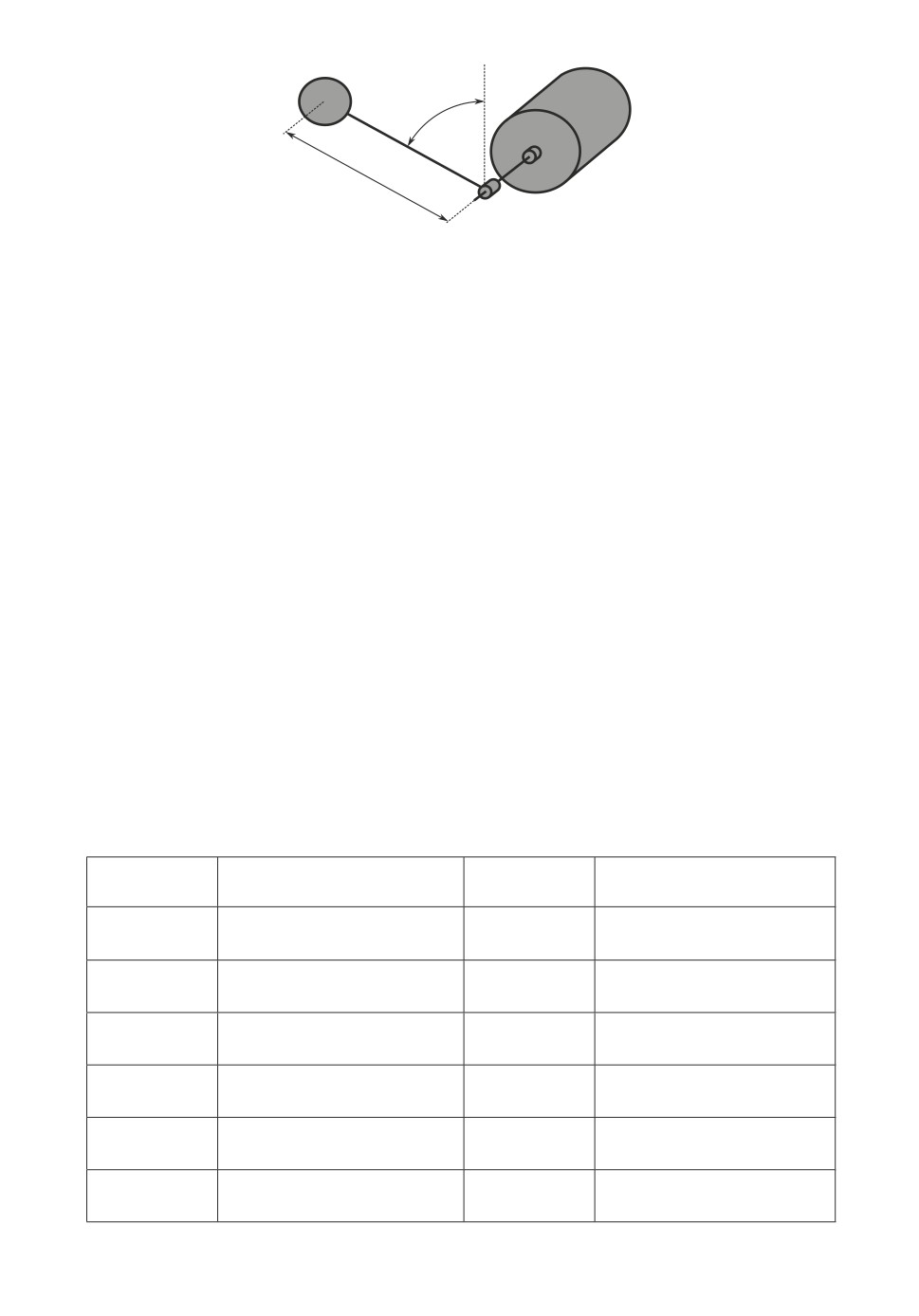
Для иллюстрации разработанного метода рассмотрим задачу синтеза сле-
дящей системы для перевернутого математического маятника. За точку от-
52
m
x1
l
Рис. 2. Схема перевернутого маятника.
счета принято верхнее вертикальное положение x1 = 0, которое является
неустойчивым (см. рис. 2).
Математическая модель с учетом редуцированной динамики двигателя по-
стоянного тока (ДПТ) аналогична (2.20) и имеет третий порядок:
x1 = x2,
(4.1)
x2 = a21 sin x1 - a22x2 + b2x3 + η(t),
x3 = -a32x2 - a33x3 + b3u,
где aij, bi - положительные конструктивные коэффициенты
a21 = g/l, a22 = κ/l, b2 = ka/( ml2),
(4.2)
a32 = c/L, a33 = R/L, b3 = 1/L,
которые не определены и могут изменяться в известных диапазонах. Описа-
ние переменных состояния x = col(x1, x2, x3) системы (4.1), которые подлежат
прямым измерениям, и параметров (4.2) приведено в табл. 1.
В системе (4.1) регулируемой (выходной) переменной является угловое по-
ложение маятника x1(t), для которого ставилась задача отслеживания задан-
ного сигнала g(t) (2.23). Для обеспечения (2.24) применялся разработанный
метод с формированием сигмоидальных локальных связей и синтеза разрыв-
Таблица 1. Описание переменных состояния и параметров объекта управления
Описание,
Описание,
Обозначение
Обозначение
единица измерения
единица измерения
x1(t)
угловое положение маят-
l
длина маятника, [м]
ника, [-π; π] [рад]
x2(t)
угловая скорость маятни-
κ
коэффициент вязкого
ка, [-2; 2] [рад/с]
трения, [H · c/м2]
x3(t)
ток якоря ДПТ, [-4; 4] [А]
c
коэффициент противо-
ЭДС ДПТ, [В · с/рад]
η(t)
неконтролируемое возму-
R
сопротивление якоря
щение, [H · м]
ДПТ, [Ом]
g = 9,81
ускорение свободного па-
L
индуктивность якоря
дения, [м/c2]
ДПТ, [Гн]
m
масса маятника, [кг]
ka
коэффициент пропор-
циональности, [H · м/А]
53
Таблица 2. Параметры объекта управления, принятые при моделировании
Диапазон
Вид или значение
изменения
Эксперимент 1 Эксперимент 2 Эксперимент 3 Эксперимент 4
0,25t, t ∈ [(k - 1)T, kT ),
η(t)
[-0,5; 0,5]
0,5 cos t
0,3 sin t
k = 1,2,..., T = 2
[-0,5; 0,5]
g(t)
0,2 sin t
0,5| sin t|
0,25 sin 2t
|ġ(t)| ≤ 0,5
m
[0,18; 0,25]
0,18
0,25
0,07 |cos(t/2)| + 0,18
l
[0,2; 0,3]
0,2
0,3
0,25
0,23
κ
[2; 4]
2
4
3
3,8
c
[0,27; 0,33]
0,27
0,33
0,3
0,28
R
[4,15; 4,2]
4,15
4,2
4,18
4,1
L
[0,012; 0,013]
0,012
0,013
0,013
0,012
ka
[1,68; 1,75]
1,68
1,75
1,7
1,69
ного управления, аналогично (3.1), (3.6) соответственно, где n = 3, u - напря-
жение питания якорной цепи ДПТ, [B].
В табл. 2 приведены рассматриваемые диапазоны изменения внешних воз-
действий, параметров объекта, а также конкретные функции и значения, при-
нятые при моделировании.
По данным табл. 2 были рассчитаны допустимые диапазоны для коэффи-
циентов (4.2):
a21 ∈ [32,70;49,05], a22 ∈ [6,67;20], b2 ∈ [74,67;243,06],
a32 ∈ [20,76;27,5], a33 ∈ [319,23;350], b3 ∈ [76,92;83,34].
На их основе, а также с учетом заданных (завышенных, см. замечание 5)
показателей (2.24)
(4.3)
Δ1 = 0,1 [рад], t1
= 5 [с]
и принятых E1 = 2,05 (Π.11), Δ2 = 0,64, Δ3 = 0,05 (Π.1) для худшего расчет-
ного случая на основе неравенств (Π.2), (Π.16), (Π.21), (Π.22) были выбраны
следующие коэффициенты обратной связи:
(4.4)
m1 = 1,96, k1 = 22; m2 = 3,54, k2 = 3,44; m3
= 190.
Моделирование проводилось в среде MATLAB-Simulink, для численного
интегрирования системы (4.1) использовался метод Эйлера с постоянным
шагом 10-5. Как показано в табл. 2, в первых двух экспериментах были при-
няты граничные значения параметров объекта из допустимых диапазонов
(в первом наименьшие, во втором наибольшие). В третьем и четвертом
экспериментах масса маятника полагалась переменной негладкой величиной,
задающее воздействие негладким (в третьем) и гладким (в четвертом),
параметры приняты в виде промежуточных значений из допустимых диа-
пазонов. Все четыре эксперимента проводились при одинаковых коэффици-
ентах обратной связи (4.4) и одинаковых начальных условиях x1(0) = π/3,
x2(0) = 0,64, x3(0) = 0,5.
54
1,2
g
1,0
x1
0,8
0,6
0,4
0,2
0
-0,2
0
5
10
15
t, c
Рис. 3. Графики g(t), x1(t) (эксперимент 1).
1,2
1,0
0,8
0,6
0,4
0,2
0
-0,2
0
5
10
15
t, c
Рис. 4. График e1(t) (эксперимент 2).
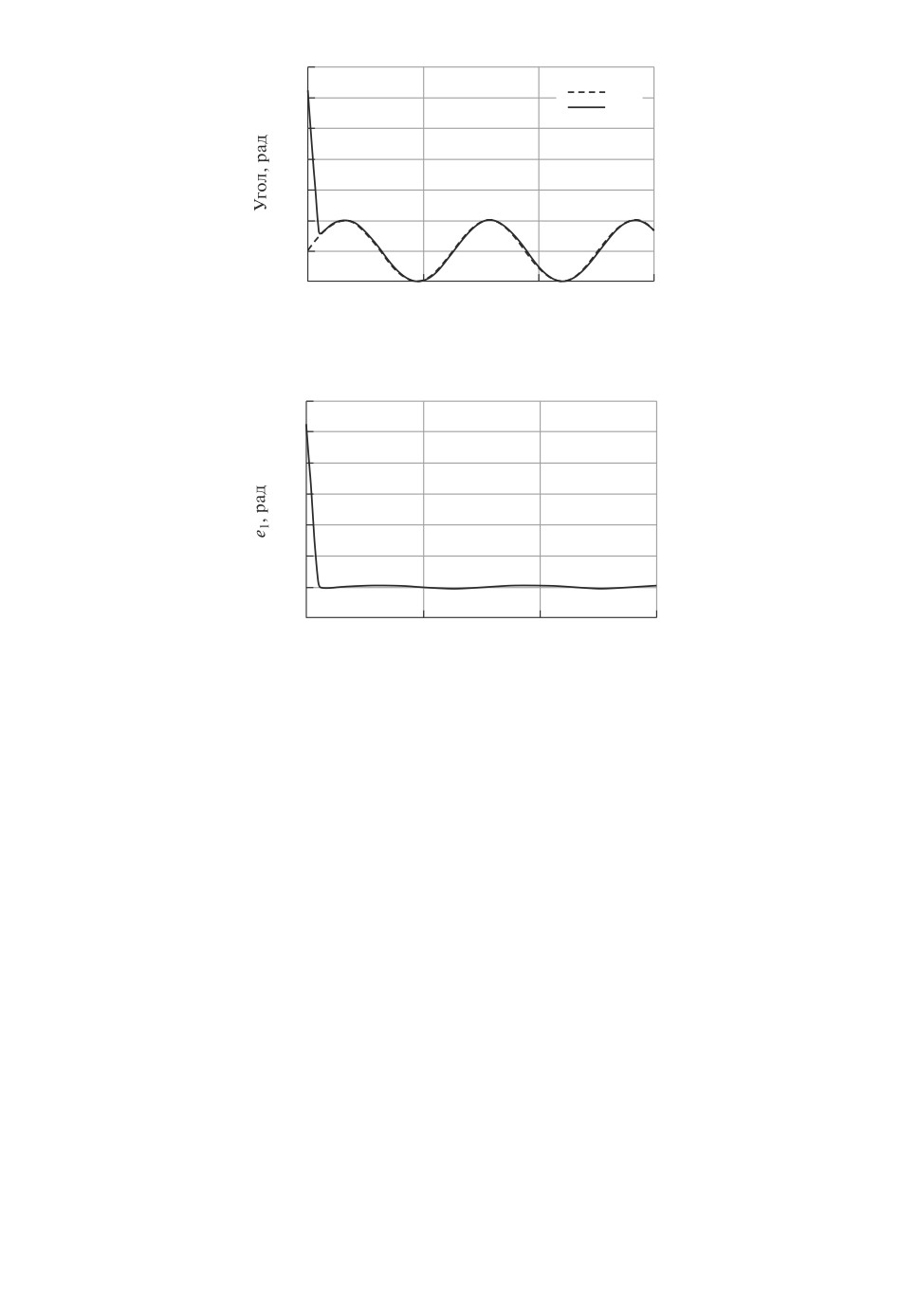
На рис. 3 для эксперимента 1 представлены графики задающего воздей-
ствия g(t) и регулируемой переменной x1(t), ее поведение во втором экспери-
менте практически не отличается от показанного на рис. 3. На рис. 4 пред-
ставлен график ошибки слежения e1(t) = x1(t) - g(t) [рад] для эксперимен-
та 2. На рис. 5-6 для экспериментов 3 и 4 приведены графики задающего
воздействия g(t) и регулируемой переменной x1(t) (снизу), а также ошибки
слежения e1(t) = x1(t) - g(t) [рад] (сверху).
В табл. 3 для всех экспериментов представлены показатели регулирования
ошибки слежения e1(t): время регулирования t∗: |e1(t)| ≤ 0,1, t ≥ t∗; величина
перерегулирования e1,max ≥ |e1(t)|, t ≥ 0; точность δ1 ≥ |e1(t)|, достигаемая
при t ≥ 5 [c].
Таким образом, из рис. 3-6 и табл. 3 следует, что цель управления дости-
гается во всех случаях, все показатели не превышают заданных значений.
Следует отметить, что в силу выбора параметров регулятора из достаточных
условий, радиусы областей сходимости ошибок слежения в установившемся
режиме оказались примерно в 4-10 раз меньше заданного, а время регулиро-
вания в 10-12 раз меньше заданного (4.3).
Конечно, высокоточные системы слежения потребуют индивидуальной на-
стройки каждого рабочего режима в условиях полной определенности пара-
55
1,0
0,5
0
0
5
10
15
1,0
g
x1
0,5
0
0
5
10
15
t, c
Рис. 5. Графики g(t), x1(t), e1(t) = x1(t) - g(t) (эксперимент 3).
1,0
0,5
0
0
5
10
15
1,0
g
x1
0,5
0
0
5
10
15
t, c
Рис. 6. Графики g(t), x1(t), e1(t) = x1(t) - g(t) (эксперимент 4).
метров объекта управления и внешних воздействий. Для системы (4.1), функ-
ционирующей в условиях неопределенности, можно обеспечить лучшие, чем
указанные в табл. 3, показатели регулирования путем увеличения коэффи-
циентов обратной связи (4.4). Предельные значения зависят от проектных
ограничений на переменные состояния и управления конкретного объекта
управления.
Таблица 3. Значения показателей качества регулирования
Требования Эксперимент Эксперимент Эксперимент Эксперимент
Показатель
(не более)
1
2
3
4
t∗, c
5
0,4532
0,4714
0,4067
0,4138
e1,max, рад
2,05
1,0474
1,0477
1,0473
1,0472
δ1, рад
0,1
0,0093
0,0096
0,0242
0,0240
5. Заключение
Предложен метод синтеза сигмоидальных обратных связей, который прин-
ципиально отличается от способа использования сигмоидов в задачах нейро-
сетевого обучения. Цель исследований заключалась в синтезе системы сле-
жения для нелинейного объекта одноканального управления при воздействии
56
параметрических и внешних возмущений без предположений об их гладкости,
о которых известны только границы диапазонов их изменения. Поставленная
цель была достигнута за счет распространения блочного подхода на форми-
рование нелинейных, всюду ограниченных сигмоидальных локальных связей,
обеспечивающих ε-инвариантность по отношению к возмущениям, не согла-
сованным с истинным управлением. Результаты моделирования подтвердили
эффективность разработанных алгоритмов.
Представленный материал является установочным для дальнейшего прак-
тикоориентированного решения задачи слежения с учетом проектных огра-
ничений на переменные состояния и управление. Эта проблема, а также рас-
пространение данного метода на многоканальные системы, представимые в
блочной форме управляемости с блоками разной размерности, составит пред-
мет дальнейших исследований авторов.
ПРИЛОЖЕНИЕ
Доказательство теоремы. Согласно идеологии блочного подхода в
замкнутой системе (3.4) нужно обеспечить следующую последовательность
сходимости невязок:
|en(t)| ≤ Δn (t ≥ tn > 0) ⇒ |en-1(t)| ≤
(Π.1)
≤ Δn-1 (t ≥ tn-1 > tn) ⇒ ... ⇒ |e1(t)| ≤ Δ1 (t ≥ t1 > t2),
где Δ1 > 0, t1 > 0 заданы (2.24), Δi > 0, i = 2, n назначаются произвольно,
зависимости ti от начальных значений невязок и принятых Δi > 0 устанав-
ливаются в процессе доказательства.
Из леммы следует существованиеki > 0, i = 1, n таких, что для лю-
бых ki ≥ki, i = 1, n гарантируются желаемые радиусы Δi > 0, i = 1, n (Π.1)
окрестностей нуля, в которые невязки сойдутся в указанные моменты време-
ни (Π.1). С учетом (2.13) аналогично (2.17) зафиксируем значения больших
коэффициентов ki на основе неравенств:
(Π.2)
k∗i ≥ki = 2,2/Δi
,
i = 1,n.
Сходимость невязок в установленные области за указанное время (Π.1) обес-
печивается с помощью выбора mi, i = 1, n.
Стабилизация системы (3.4) осуществляется “снизу вверх” (Π.1). Доста-
точные условия для выбора амплитуд, аналогичные (2.18), справедливы при
выполнении указанных условий:
0,8b1,minm1 > F1 + G1 + b1,minΔ2,
|e2| ≤ Δ2;
(Π.3)
0,8bi,minmi > Fi + |Λi-1| + bi,minΔi+1,
|ei+1| ≤ Δi+1, i = 2,n - 1;
0,8bn,minmn > Fn + |Λn-1| .
Выполнение (Π.2)-(Π.3) обеспечивает последовательную стабилизацию
невязок с заданной точностью без учета времени сходимости, которое за-
висит от начальных условий. В частном случае |ei(0)| ≤ Δi, i = 1, n выполне-
ние (Π.2)-(Π.3) обеспечит |ei(t)| ≤ Δi, i = 1, n при t ≥ 0, т.е. цель управления
57
(2.24) достигается. Заметим, что если |ei(0)| ≤ Δi, i = n, j + 1, |ej(0)| > Δj, то
переходный процесс невязки ej(t) будет монотонным; в частности, при j = 1
у ошибки слежения e1(t) переходный процесс будет без перерегулирования.
В общем случае |ei(0)| > Δi, i = 1, n в рамках данных построений моно-
тонный переходный процесс гарантируется только для en(t). Пока перемен-
ные нижних блоков системы (3.4) не достигнут установленных окрестностей
нуля (Π.1), переменные верхних блоков растут по модулю и достигают мак-
симального значения не позже, чем в следующие моменты времени:
|en(t)| ≤ |en(0)| = en,max,
(Π.4)
|ei(t)| ≤ |ei(ti+1)| = ei,max, i = n - 1, 1, t ≥ 0.
В силу построений (3.2) оценим начальные значения невязок:
|e1(0)| ≤ |x1(0)| + |g(0)| ,
(Π.5)
|ei(0)| ≤ |xi(0)| + mi-1σ(ki-1 |ei-1(0)|) ≤ |xi(0)| + mi-1, i = 2, n.
Принимая во внимание (3.4), (Π.3), (Π.5) и учитывая, что собственные дви-
жения в замкнутой системе (3.4) устойчивые, составим оценки максимальных
значений (Π.4):
e1,max = |e1(0)| + b1,max(e2,max - Δ2)t2;
(Π.6)
ei,max = |xi(0)| + mi-1 + bi,max(ei+1,max - Δi+1)ti+1, i = 2,n - 1;
en,max = |xn(0)| + mn-1.
Для обеспечения заданного времени сходимости требуется увеличить ниж-
ние границы для выбора амплитуд (Π.3). Предварительно дадим оценки про-
изводных фиктивных управлений (3.5). Они отличаются на разных интер-
валах и зависят от соответствующих оценок производных сигма-функций и
производных соответствующих невязок (3.4). Для производных невязок ei(t),
i = 1,n - 1 с учетом (Π.3) справедливы оценки:
t ∈ [0;t2) : |ė1(t)| ≤
≤F1 +G1 +b1,maxΔ2
+b1,max(e2,max - Δ2) + b1,maxm1 <
|
{z
}
<0,8b1,minm1
< 2b1,maxm1 + b1,max(e2,max - Δ2),
t ≥ t2 : |ė1(t)| ≤ F1 + G1 + b1,maxΔ2 + b1,maxm1 < 2b1,maxm1;
(Π.7)
t ∈ [0;ti+1) : |ėi(t)| =
= Fi + |Λi-1| + bi,maxΔi+1
+bi,max(ei+1,max - Δi+1) + bi,maxmi <
|
{z
}
<0,8bi,minmi
< 2bi,maxmi + bi,max(ei+1max - Δi),
t ≥ ti+1 : |ėi(t)| = Fi + |Λi-1| + bi,maxΔi+1 + bi,maxmi <
< 2bi,maxmi, i = 2, n - 1.
58
Для производной сигма-функции в силу (2.14) на указанных интервалах
имеем:
|ei(t)| > c/ki, t ∈ [0;ti) : 0 < 0,5ki(1 - σ2(kiei)) < 0,18ki,
(Π.8)
|ei(t)| ≤ c/ki, t ≥ ti : 0,18ki ≤ 0,5ki(1-σ2(kiei)) ≤ 0,5ki, i = 1,n-1.
Объединяя (Π.7)-(Π.8), получим оценки производных фиктивных управле-
ний (3.5) на указанных интервалах:
ki(1 - σ2(kiei))
|Λi| = mi
|ėi| ≤
2
0,36kim2ibi,max + 0,18kimibi,max(ei+1,max - Δi+1), t ∈ [0; ti+1);
≤
0,36kimibi,max, t ∈ [ti+1; ti);
kim2ibi,max, t ≥ ti; i = 1,n - 1.
Для того чтобы единообразно принять в качестве оценки
(Π.9)
|Λi| ≤ kim2ibi,max
,
t ≥ 0; i = 1,n - 1,
нужно обеспечить
0,18kimibi,max(ei+1,max - Δi+1) ≤ 0,64kim2ibi,max ⇒ ei+1,max - Δi+1 ≤ 3,5mi,
i = 1,n - 1.
С этой целью введем ограничения на пиковые значений невязок, несколько
снизив предельные оценки для удобства расчетов:
(Π.10)
ei,max ≤ 3mi-1 + Δi
,
i = 2,n.
Для единообразия введем ограничение для перерегулирования по ошибке
слежения:
(Π.11)
|e1(0)| < e1,max ≤ E1.
В частном случае |e1(0)| < Δ1 выполнение e1,max ≤ E1 = Δ1 обеспечит |e1(t)| ≤
≤ Δ1, t ≥ 0.
С учетом (Π.10)-(Π.11) неравенства (Π.6) примут вид
e1,max = |e1(0)| + 3b1,maxm1t2 ≤ E1;
(Π.12) ei,max = |xi(0)| + mi-1 + 3bi,maxmiti+1 ≤ 3mi-1 + Δi, i = 2, n - 1;
en,max = |xn(0)| + mn-1 ≤ 3mn-1 + Δn,
откуда следуют дополнительные условия, которые надо учитывать при вы-
боре ti, i = n, 2 (0 < tn < tn-1 < . . . < t2 < t1) и амплитуд фиктивных управ-
лений:
(Π.13)
E1 - |e1(0)|
2mi-1 + Δi - |xi(0)|
0<m1 ≤
,
0<mi ≤
,
i = 2, n - 1;
3b1,maxt2
3bi,maxti+1
|xi+1(0)| - Δi+1
(Π.14)
mi >
,
i = 1, n - 1.
2
59
Заметим, что по построениям (Π.3) mi-1 > Δi, i = 2, n, при этом Δi > 0
могут быть приняты как меньше, так и больше величин |xi(0)|, требования
малости к ним не предъявляются. Для упрощения расчетов можно изначаль-
но зафиксировать Δi = |xi(0)|, i = 2, n, что снимает необходимость проверки
выполнения условий (Π.14).
В общем случае Δi < |xi(0)|, i = 2, n неравенства нижней границы выбора
амплитуд mi, i = 1, n - 1 будут содержать две базовые компоненты. С помо-
щью первой компоненты mi1, а также mn аналогично (2.19) обеспечивает-
ся сходимость невязок e1(t), e2(t), . . . , en(t) на интервалах [t2; t1], [t3; t2], . . . ,
[0; tn] соответственно из пиковых значений (Π.6), (Π.12) в заданные области
(Π.1) за заданное время (2.24); а с помощью второй mi2 ограничения (Π.14).
При этом в отличие от амплитуды истинного управления mn, которая выби-
рается только на основе нижней оценки, для выбора амплитуд фиктивных
управлений имеются ограничения сверху (Π.13).
Формализуем пошаговую процедуру последовательного “сверху вниз” вы-
бора амплитуд сигмоидальных управлений и допустимых моментов време-
ни ti, i = 2, n при заданных Δ1, t1, назначенных E1 (Π.11), Δi > 0, i = 2, n и
принятых на их основе k∗i, i = 1, n (Π.2). В процессе процедуры допускается
варьирование свободных параметров.
Шаг 1. С учетом (Π.12) первое неравенство (Π.3) примет вид:
|e1(0)| + 3b1,maxm1t2 - Δ1
0,8b1,minm1 ≥
+F1 +G1 +b1,minΔ2 ⇒
t1 - t2
|e1(0)| - Δ1 + (F1 + G1 + b1,minΔ2)(t1 - t2)
⇒m11 ≥
,
0,8b1,mint1 - (0,8b1,min + 3b1,max)t2
откуда следует ограничение на выбор 0 < t2 < t1:
b1,min
(Π.15)
0,8b1,mint1 - (0,8b1,min + 3b1,max)t2 > 0 ⇒ t2 < 0,2
t1.
b1,max
Выбираем t∗2 > 0 на основе (Π.15) и подставляем его в двойное неравенство
(Π.16)
max{m11; m12} < m1 < m1,
где
|e1(0)| - Δ1 + (F1 + G1 + b1,minΔ2)(t1 - t∗2)
m11 =
,
0,8b1,mint1 - (0,8b1,min + 3b1,max)t∗
2
(Π.17)
|x2(0)| - Δ2
E1 - |e1(0)|
m12 =
,
m1 =
2
3b1,maxt∗
2
Если (Π.16) выполняется, то тогда фиксируем t∗2, m∗1 ∈ ( m1; m1] и переходим
на второй шаг. При невыполнении (Π.3) следует варьировать произвольные
параметры. Это можно сделать двумя способами.
Первый способ . Если требуется обеспечить принятое E1 (Π.11), то то-
гда варьируем Δ2 и/или t2. Если при изначально принятом
0<t∗2 <
60
< 0,2b1,mint1/b1,max имеет место m12 > m11 (Π.17), то путем увеличения Δ2
(вплоть до Δ2 = |x2(0)|) нужно обеспечить m11 > m12. Если при новом Δ∗2
неравенство (Π.16) не выполняется или изначально m11 > m12, то тогда сни-
жаем t∗2. Критическое значение t2 > 0 : m11(t2) = m1(t2) существует и равно
√
p212 - 4p11p13 - p12
t2 =
,
2p11
где
p11 = -3b1,max(F1 + G1 + b1,minΔ2),
p12 = 0,8b1,min (E1 - |e1(0)|) + 3b1,max(E1 - Δ1 + (F1 + G1 + b1,minΔ2)t1),
p13 = -0,8b1,min (E1 - |e1(0)|)t1.
Из предельного соотношения
|e1(0)| - Δ1 + (F1 + G1 + b1,minΔ2)t1
lim
m11(t2) =
=
t2→+0
0,8b1,mint1
(Π.18)
E1 - |e1(0)|
= const < lim
= +∞
t2→+0
3b1,maxt2
следует, что m1 можно сделать сколь угодно большим и при любом t∗2 > 0 :
0 < t∗2 < t2 неравенство (Π.16) будет выполнено.
Таким образом, путем снижения t2 можно обеспечить любое, достаточ-
но малое перерегулирование по ошибке слежения (Π.11). Однако это может
привести к существенному росту нижних границ для выбора амплитуд в сле-
дующих блоках.
Второй способ . Если отказаться от принятого E1 (Π.11) и увеличить его
значение:
E1 >E = |e1(0)| + 3b1,maxm∗1t∗2,
где
E - минимально возможное перерегулирование ошибки слежения при
изначально принятом 0 < t∗2 < 0,2b1,mint1/b1,max, то тогда можно произвольно
увеличить верхнюю границу m1 для выбора амплитуды (Π.16).
Допустимые значения t∗2, m∗1, Δ∗2 и k∗2(Δ∗2) фиксируются, переходим на
второй шаг.
Шаг i (i = 2,n - 1). Соответствующее номеру шага неравенство (Π.1), а
именно |ei(t)| ≤ Δi (t ≥ ti > ti+1), обеспечивается путем выбора mi. С учетом
(Π.9), (Π.12) i-е неравенство (Π.3) примет вид
|xi(0)| + m∗i-1 + 3bi,maxmiti+1 - Δ∗i
(Π.19)
0,8bi,minmi ≥
+
t∗i - ti+1
+ Fi + k∗i-1(m∗i-1)2bi-1,max + bi,minΔi+1 ⇒
)
|xi(0)| + m∗i-1 - Δ∗i + (Fi + k∗i-1(m∗i-1)2bi-1,max + bi,minΔi+1)(t∗i - ti+1
mi1 ≥
,
0,8bi,mint∗i - (0,8bi,min + 3bi,max)ti+1
61
откуда следует ограничение на выбор 0 < ti+1 < t∗i, аналогичное (Π.15):
bi,min
(Π.20)
0,8bi,mint∗i - (0,8bi,min + 3bi,max)ti+1 > 0 ⇒ ti+1 < 0,2
t∗i.
bi,max
Выбираем t∗i+1 > 0 на основе (Π.20) и подставляем его в двойное неравен-
ство
(Π.21)
max{mi1; mi2} < mi < mi,
где mi1(t∗i+1) (Π.19),
|xi+1(0)| - Δi+1
2m∗i-1 + Δ∗i - |xi(0)|
mi2 =
,
mi =
2
3bi,maxt∗
i+1
Если (Π.21) выполняется, то тогда фиксируем t∗i+1, m∗i ∈ ( mi; mi] и пе-
реходим на следующий шаг. При невыполнении (Π.21) следует варьиро-
вать произвольные параметры Δi+1 и/или ti+1. Если изначально mi2 > mi1,
то путем увеличения Δi+1 (вплоть до Δi+1 = |xi+1(0)|) нужно обеспе-
чить mi1 > mi2. Если при новом Δ∗i+1 неравенство (Π.21) не выполняется
или изначально mi1 > mi2, то тогда снижаем t∗i+1. Критическое значение
ti+1 > 0 : mi1(ti+1) =mi(ti+1) существует и равно
√
p2i2 - 4pi1pi3 - pi2
ti+1 =
,
2pi1
где
(
)
pi1 = - 3bi,max
Fi + ki-1(mi-1)2bi-1,max + bi,minΔi+1
,
(
)
pi2 = 3bi,max
3m∗i-1 + (Fi + k∗i-1(m∗i-1)2bi-1,max + bi,minΔi+1)t∗i
+
(
)
+ 0,8bi,min
2m∗i-1 + Δ∗i - |xi(0)|
,
(
)
pi3 = - 0,8bi,min
2m∗i-1 + Δ∗i - |xi(0)|
t∗i,
i = 2,n - 1.
Из предельного соотношения, аналогичного (Π.18), а именно
lim
mi1(ti+1) =
ti+1→+0
|xi(0)| + m∗i-1 - Δ∗i + (Fi + k∗i-1(m∗i-1)2bi-1,max + bi,minΔi+1)t∗i
=
= const <
0,8bi,mint∗
i
(0)|
2m∗i-1 + Δ∗i - |xi
< lim
= +∞,
ti+1→+0
3bi,maxti+1
следует, что при любом t∗i+1 > 0 : 0 < t∗i+1 < ti+1 неравенство (Π.3) будет вы-
полнено.
Заметим, что на i-м шаге (в отличие от первого) обеспечить выполнение
(Π.21) можно только указанным способом. Увеличение верхней границы mi
62
путем увеличения m∗i-1 приведет также к росту нижней границы mi(mi1),
причем более быстрыми темпами.
Допустимые значения t∗i+1, m∗i, Δ∗i+1 и k∗i+1(Δ∗i+1) фиксируются, переходим
на следующий шаг.
Шаг n (последний). С учетом (Π.9), (Π.12) третье неравенство (Π.3) при-
мет вид, аналогичный (2.19):
)
1,25
(Π.22)
mn ≥ mn =
( |xn(0)| + m∗n-1 - Δ∗n + Fn + k∗n-1(m∗n-1)2bn-1,max
bn,min
t∗n
На основе (Π.22) фиксируем m∗n. Процедура настройки амплитуд законче-
на.
Таким образом, существуют такиеki > 0, i = 1, n (Π.2), 0 < mi < mi, i =
= 1, n - 1 (Π.16)-(Π.17), (Π.21) и
mn > 0 (Π.22), что для любых ki ≥ki,
mi : mi < mi ≤ mi, ∀mn ≥ mn в замкнутой системе (3.4) переменные по-
следовательно сходятся в указанные области за указанное время (Π.1), что и
обеспечивает цель управления (2.24). Теорема доказана.
СПИСОК ЛИТЕРАТУРЫ
1.
Wonham W.M. Linear Multivariable control: a geometric approach. N.Y.: Springer-
Verlar, 1979.
2.
Никифоров В.О. Адаптивное и робастное управление с компенсацией возмуще-
ний. СПб.: Наука, 2003.
3.
Краснова С.А., Уткин А.В. Сигма-функция в задачах синтеза наблюдателей
состояний и возмущений // ПУ. № 5. 2015. С. 27-36.
Krasnova S.A., Utkin A.V. Sigma Function in Observer Design for States and Per-
turbations // Autom. Remote Control. 2016. V. 77. No. 9. P. 1676-1688.
4.
Маликов А.И. Синтез наблюдателей состояния и неизвестных входов для нели-
нейных липшицевых систем с неопределенными возмущениями // АиТ. 2018.
№ 3. С. 21-43.
Malikov A.I. Synthesis of State Unknown Input Observers for Nonlinear Lipschitz
Systems with Uncertain Disturbances // Autom. Remote Control. 2018. Vol. 79.
No. 3. P. 406-424.
5.
Краснова С.А. Оценивание внешних возмущений на основе виртуальных дина-
мических моделей // УБС. 2018. Вып. 76. С. 6-25.
Krasnova S.A. Estimating the Derivatives of External Perturbations Based on Vir-
tual Dynamic Models // Autom. Remote Control. 2020. V. 81. No. 5. P. 897-910.
6.
Андриевский Б.Р., Фуртат И.Б. Наблюдатели возмущений: методы и приложе-
ния. Часть 1. Методы // АиТ. 2020. № 9. С. 3-61.
Andrievsky B.R., Furtat I.B. Disturbance Observers: Methods and Applications. I.
Methods // Autom. Remote Control. 2020. Vol. 81. No. 9. P. 1563-1610.
7.
Емельянов С.В., Коровин С.К. Новые типы обратной связи. М.: Наука. Физмат-
лит, 1997.
8.
Edwards С., Spurgeon S. Sliding mode control: theory and applications. Taylor &
Francis Ltd, 1998.
63
9.
Utkin V.I., Guldner J., Shi J. Sliding Mode Control in Electromechanical Systems.
N.Y.: CRC Press, 2009.
10.
Уткин В.А., Уткин А.В. Задача слежения в линейных системах с параметри-
ческими неопределенностями при неустойчивой нулевой динамике // АиТ. 2014.
№ 9. С. 62-81.
Utkin V.A., Utkin A.V. Problem of Tracking in Linear Systems with Parametric Un-
certainties under Unstable Zero Dynamics // Autom. Remote Control. 2014. V. 75.
No. 9. P. 1577-1592.
11.
Krstic M., Kanellakopoulos I., Kokotovic P. Nonlinear and adaptive control design.
N.Y.: Wiley, 1995.
12.
Ebrahim A., Murphy G.V. Adaptive backstepping controller design of an inverted
pendulum // Proc. Thirty-Seventh Southeastern Symposium on System Theory.
2005. P. 172-174.
13.
Feng H., Qiao W., Yin C., Yu H., Cao D. Identification and compensation of non-
linear friction for a electro-hydraulic system // Mechanism and Machine Theory.
2019. V. 141. P. 1-13.
14.
Hidalgo M., Garcia C. Friction compensation in control valves: Nonlinear control
and usual approaches // Control Engineering Practice. 2018. V. 58. P. 42-53.
15.
Антипов А.С., Краснова С.А. Блочный синтез системы слежения для двухро-
торной электромеханической системы при ограничениях на переменные состоя-
ния // ПММ. 2021. Т. 85. № 1. С. 3-20.
Antipov A.S., Krasnova S.A. Block-Based Synthesis of a Tracking System for a Twin-
Rotor Electromechanical System with Constraints on State Variables // Mech. Solids.
2021. V. 56. No. 7. Р. 43-56.
16.
Кочетков С.А., Уткин В.А. Обеспечение инвариантности за счет создания ко-
лебательных режимов // ДАН. 2013. Т. 452. № 6. С. 1-6.
Kochetkov S.A., Utkin V.A. Providing the invariance property on the basis on oscil-
lation modes // Doklady Mathematics. 2013. Vol. 88. No. 2. Р. 618-623.
17.
Краснова С.А., Мысик Н.С. Каскадный синтез наблюдателя состояния с нели-
нейными корректирующими воздействиями // АиТ. 2014. № 2. С. 106-128.
Krasnova S.A., Mysik N.S. Cascade Synthesis of a State Observer with Nonlinear
Correction Influences // Autom. Remote Control. 2014. V. 75. No. 2. P. 263-280.
18.
Краснова С.А., Уткин В.А., Уткин А.В. Блочный подход к анализу и синтезу
инвариантных нелинейных систем слежения // АиТ. 2017. № 12. С. 26-53.
Krasnova S.A., Utkin V.A., Utkin A.V. Block Approach to Analysis and Design of
the Invariant Nonlinear Tracking Systems // Autom. Remote Control. 2017. V. 78.
No. 12. P. 2120-2140.
19.
Антипов А.С., Краснов Д.В., Уткин А.В. Декомпозиционный синтез системы
управления электромеханическими объектами в условиях неполной информа-
ции // Прикладная математика и механика. 2019. Т. 83. Вып. 4. С. 530-548.
Antipov A.S., Krasnov D.V., Utkin A.V. Decomposition Synthesis of the Control
System of Electromechanical Objects in Conditions of Incomplete Information //
Mech. Solids. 2019. V. 54. No. 5. P. 47-60.
20.
Лукьянов А.Г. Блочный метод синтеза нелинейных систем на скользящих ре-
жимах // АиТ. 1998. № 7. С. 14-34.
Luk’yanov A.G. A block method of synthesis of nonlinear systems at sliding modes //
Autom. Remote Control. 1998. V. 59. No. 7. Part 1. P. 916-933.
64
21.
Краснова С.А., Сиротина Т.Г., Уткин В.А. Структурный подход к робастному
управлению // АиТ. 2011. № 8. С. 65-95.
Krasnova S.A., Sirotina T.G., Utkin V.A. A structural approach to robust control //
Autom. Remote Control. 2011. Vol. 72. No. 8. P. 1639-1666.
22.
Уткин В.А. Инвариантность и автономность в системах с разделяемыми дви-
жениями // АиТ. 2001. № 11. С. 73-94.
Utkin V.A. Invariance and Independence in Systems with Separable Motion // Au-
tom. Remote Control. 2001. V. 62. No. 11. P. 1825-1843.
23.
Tsypkin Y., Polyak B. High-Gain Robust Control // European J. Control. 1999.
Vol. 5. P. 3-9.
24.
Поляк Б.Т., Тремба А.А., Хлебников М.В., Щербаков П.С., Смирнов Г.В. Боль-
шие отклонения в линейных системах при ненулевых начальных условиях //
АиТ. 2015. № 6. С. 18-41.
Polyak B.T., Tremba A.A., Khlebnikov M.V., Shcherbakov P.S., Smirnov G.V. Large
Deviations in Linear Control Systems with Nonzero Initial Conditions // Autom.
Remote Control. 2015. Vol. 76. No. 6. С. 957-976.
25.
Slotine J.Е., Li W. Applied Nonlinear Control. New Jersey: Prentice-Hall, 1991.
26.
Пестерев А.В. Оценка области притяжения нулевого решения для аффинных
систем с ограниченным управлением // АиТ. 2017. № 4. С. 3-20.
Pesterev A.V. Attraction domain estimate for single-input affine systems with con-
strained control // Autom. Remote Control. 2017. V. 78. No. 4. P. 581-594.
27.
Бенджио И., Гудфеллоу Я., Курвилль А. Глубокое обучение. М.: ДМК-Пресс,
2018.
Goodfellow I., Bengio Y., Courville A. Deep Learning. The MIT Press, 2016.
28.
Шумихин А.Г., Бояршинова А.С. Идентификация сложного объекта управле-
ния по частотным характеристикам, полученным экспериментально на его ней-
росетевой динамической модели // АиТ. 2015. № 4. С. 125-132.
Shumikhin A.G., Boyarshinova A.S. Identification of a complex control object with
frequency characteristics obtain whith its dynamic neural network model // Autom.
Remote Control. 2015. V. 76. No 4. P. 650-657.
29.
Краснова С.А., Антипов А.С. Иерархический синтез сигмоидальных обобщен-
ных моментов манипулятора в условиях неопределенности // ПУ. 2016. № 4.
С. 10-21.
Krasnova S.A., Antipov A.S. Hierarchical Design of Sigmoidal Generalized Moments
of Manipulator under Uncertainty // Autom. Remote Control. 2018. Vol. 79. No. 3.
P. 554-570.
30.
Kochetkov S.A., Krasnova S.A., Antipov A.S. Cascade Synthesis of Electromechan-
ical Tracking Systems with Respect to Restrictions on State Variables // IFAC-
PapersOnLine. 2017. V. 50. No. 1. P. 1042-1047.
31.
Антипов А.С., Краснова С.А. Система стабилизации положения тележки кра-
на с использованием сигмоидальной функции // Мехатроника, автоматизация,
управление. 2019. Т. 20. № 10. С. 609-614.
Antipov A.S., Krasnova S.A. Sistema stabilizatsii polozheniya telezhki krana s is-
pol’zovaniyem sigmoidal’noy funktsii (Stabilization System of Convey-Crane Posi-
tion Via Sigmoidal Function) // Mekhatronika, avtomatizatsiya, upravleniye. 2019.
V. 20. No. 10. P. 41-54. (In Russian)
65
32. Kokunko Yu., Krasnova S. Synthesis of a tracking system with restrictions on UAV
state variables // Mathematics in Engineering, Science and Aerospace (MESA). 2019.
Vol. 10. No. 4. Р. 695-705.
33. Фомичев В.В., Краев А.В., Роговский А.И. Об уравнения нулевой динамики
некоторых аффинных нелинейных систем // ДУ. 2018. Т. 54. № 12. С. 1695-1709.
Fomichev V.V., Kraev A.V., Rogovskii A.I. On the zero dynamics equations of
some nonlinear systems affine in control // Differ. Equations. 2018. V. 54. No. 12.
P. 1654-1668.
34. Живанович М.М., Лазаревич М.П. Применение принципа декомпозиции для
стабилизации с заданной точностью номинального движения механической си-
стемы // АиТ. 2012. № 12. С. 65-88.
Živanović, M.M., Lazarević, M.P. Using the decomposition principle to stabilize the
nominal motion of a mechanical system with given accuracy // Autom. Remote
Control. 2012. Vol. 73. No. 12. P. 2001-2020.
35. Юркевич В.Д. Синтез многоканальной системы управления роботами-манипу-
ляторами на основе метода разделения движений // Автометрия. 2016. Т. 52.
№ 2. С. 107-114.
Yurkevich V.D. Multi-channel control system design for a robot manipulator based
on the time-scale method // Optoelectronics, Instrumentation and Data Processing.
2016. V. 52. No. 2. P. 196-202.
Статья представлена к публикации членом редколлегии П.В. Пакшиным.
Поступила в редакцию 04.03.2021
После доработки 02.08.2021
Принята к публикации 29.08.2021
66