Автоматика и телемеханика, № 1, 2022
Нелинейные системы
© 2022 г. А.В. ПЕСТЕРЕВ, д-р физ.-мат. наук (alexanderpesterev.ap@gmail.com),
Ю.В. МОРОЗОВ, канд. физ.-мат. наук (tot1983@inbox.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
СТАБИЛИЗАЦИЯ ТЕЛЕЖКИ С ОБРАТНЫМ МАЯТНИКОМ
Рассматривается задача стабилизации движущейся вдоль прямой те-
лежки с установленным на ней перевернутым маятником. Цель управ-
ления стабилизировать тележку в заданной целевой точке так, чтобы
при этом маятник находился в верхнем вертикальном положении. Ос-
новная трудность, связанная с решением данной задачи, заключается в
том, что две подсистемы (тележка и маятник) должны быть стабилизиро-
ваны одновременно с помощью одного управления. Предлагается новый
закон управления, основанный на введении эталонной системы второго
порядка, траектория движения которой принимается в качестве целевой
для тележки с маятником. С помощью расширения эталонной системы
до 4-го порядка и введения алгебраического условия, связывающего две
системы, находится целевая траектория в четырехмерном фазовом про-
странстве исходной системы и строится закон управления, обеспечиваю-
щий асимптотическое стремление траектории замкнутой системы к це-
левой. Полученный в работе закон управления применим к системам с
произвольным соотношением масс маятника и тележки, так как замкну-
тая система не зависит от массовых характеристик системы. Найдена об-
ласть значений параметров системы, при которых линеаризованная си-
стема устойчива. Изложение иллюстрируется численными примерами, де-
монстрирующими эффективность предлагаемого управления.
Ключевые слова: стабилизация, тележка с обратным маятником, локаль-
ная устойчивость.
DOI: 10.31857/S0005231022010068
1. Введение
Тележка с обратным маятником
классический пример нелинейной
неустойчивой системы. Модель рассматривалась во множестве работ по тео-
рии управления и использовалась как тестовый пример при апробации новых
идей и подходов, разработанных для стабилизации неминимально фазовых
аффинных систем, в частности систем, описывающих движение велосипеда,
моноцикла, сигвея и т.п. В линейном приближении задача подробно обсуж-
далась в книге Ю. Неймарка [1]. Большинство обсуждаемых в литературе
нелинейных законов управления основаны на представлении системы в виде
совокупности двух связанных подсистем с разнотемповой динамикой: подси-
стемы с быстрой динамикой (маятник) и подсистемы с медленной динамикой
(тележка). При этом можно выделить три различных подхода, используемых
почти во всех работах по этой тематике.
95
Первый подход [2] основан на оптимальной стабилизации маятника по
быстродействию, при этом стабилизация тележки в нужной точке достигает-
ся введением силы вязкого трения, которая не позволяет тележке разгонять-
ся. Если эта сила равна нулю, как в рассматриваемом в настоящей статье
случае, стабилизация тележки вообще не гарантируется, несмотря на стаби-
лизацию маятника. Дальнейшее развитие этого подхода можно найти в [3].
Идея второго подхода [4] заключается в выделении “многообразия внут-
реннего равновесия” (internal equilibrium manifold). Ищется такой закон
управления, который приводит систему в малую окрестность многообразия и
обеспечивает ее движение в этой окрестности. Предположение о более быст-
рой динамике маятника по сравнению с динамикой тележки позволяет за-
давать многообразие с помощью алгебраического уравнения, связывающе-
го отклонение маятника с позицией и скоростью тележки. Похожий прием
в упрощенном виде применялся позднее в [5, 6]. В [5] ставится задача гло-
бальной оптимизации при ограниченном ресурсе управления и предлагается
комбинированный закон управления, когда при больших начальных отклоне-
ниях для попадания в область, где стабилизация может быть гарантирована,
применяется раскачивание маятника. В [6] указанный подход обобщается на
случай, когда параметры системы известны неточно, и предлагается робаст-
ный вариант закона управления.
Разработанный Тилом третий подход [7] применим к достаточно широкому
классу нелинейных систем, представимых в блочном виде, где одна из под-
систем асимптотически устойчива при нулевой динамике второй подсистемы
(feedforward form), и основан на применении теоремы о малом параметре уси-
ления [7]. Основная идея данного подхода применительно к рассматриваемой
системе заключается в том, что если есть глобальный закон управления ма-
ятником, то всегда можно построить локальный закон управления тележкой.
На этих же идеях основаны работы [8, 9]. Основной недостаток данного под-
хода заключается в том, что стабилизация достигается только для достаточно
узкой локальной области по переменным, отвечающим за позицию тележки.
С другой стороны, если, наоборот, потребовать глобальную стабилизацию те-
лежки, будет сужена гарантированная область устойчивости по переменным,
отвечающим за положение маятника.
Множество законов управления, предложенных для рассматриваемой си-
стемы, не исчерпывается непрерывными законами. Так, в [10] для стабили-
зация системы применяется разрывный закон управления на скользящих ре-
жимах. Автор приводит исходную систему с помощью обратимой нелинейной
замены переменных к регулярной форме, содержащей управление только в
последнем уравнении. В результате синтезируется закон управления для но-
вой системы, содержащий как непрерывную (отвечающую за компенсацию
внутренней динамики маятника), так и разрывную компоненты (гарантиру-
ет выход и скольжение системы по нелинейной поверхности в 4-х мерном
фазовом пространстве для некоторого множества начальных условий).
Основной недостаток всех вышеперечисленных работ отсутствие кон-
структивного метода выбора параметров в законе управления, гарантирую-
96
щих хотя бы локальную стабилизацию. Как правило, авторы ограничиваются
достаточно общими утверждениями о существовании таких параметров.
В настоящей работе предлагается новый гладкий нелинейный закон управ-
ления, основанный на введении более простой, эталонной, системы второго
порядка. Эталонная система стабилизируется в целевой точке с помощью
аналитически заданного ограниченного управления, обеспечивающего желае-
мые характеристики переходного процесса. Траектория эталонной системы
принимается в качестве целевой для тележки с маятником, и ищется такое
управление, которое обеспечит движение тележки по траектории, асимпто-
тически приближающейся к целевой траектории. Синтезированный в работе
закон управления применим к системам с произвольным соотношением масс
маятника и тележки, так как замкнутая система не зависит от массовых
характеристик системы. Проведен исчерпывающий анализ линеаризованной
замкнутой системы и определена область значений параметров закона управ-
ления, гарантирующих локальную стабилизируемость системы.
2. Постановка задачи
Рассматривается задача стабилизации движущейся без проскальзывания
колес вдоль прямой тележки массы M с установленным на ней переверну-
тым маятником массы m. Для простоты будем считать маятник математи-
ческим и пренебрежем трением. Координату центра тележки обозначим че-
рез x, а угловое отклонение маятника от вертикальной оси через φ (рис. 1).
Будем считать положительным угол, отсчитываемый от верхнего положения
маятника в направлении по часовой стрелке. Уравнения движения системы
хорошо известны (например, [5, 10]):
(1)
µx+m
φ cos φ - mlφ2
sin φ = U,
(2)
mlxcos φ + ml2 φ
− mgl sin φ = 0.
Здесь µ = M + m, l - длина подвеса маятника и U - действующая на тележ-
ку управляющая сила. Будем считать, что в начальный момент отклонение
m
f
f
g
U
M
x
x
Рис. 1. Тележка с обратным маятником.
97
маятника ограничено прямым углом, т.е. |φ(0)| < π/2. Случай большего от-
клонения сводится к рассматриваемому предварительным применением спе-
циального закона управления, позволяющего перевести маятник из произ-
вольного начального положения в указанную область (например, с помощью
раскачивания, как в [5] в случае ограниченного управления).
Цель управления стабилизировать тележку в заданной целевой точке
на линии так, чтобы при этом маятник находился в верхнем вертикальном
положении. Без потери общности будем считать, что целевая точка совпада-
ет с началом координат. Основная трудность, связанная с данной задачей,
заключается в том, что две подсистемы (тележка и маятник) должны быть
стабилизированы одновременно с помощью одного управления.
Рассмотрим также более простую задачу стабилизации в начале координат
тележки массы µ = M + m без маятника, которую будем называть эталон-
ной системой, с помощью заданной управляющей силы U1(w,w˙) (будем ис-
пользовать обозначение w для координаты центра тележки, чтобы отличать
эталонную систему от исходной):
(3)
µw=U1
(w,w˙ ), w(0) = x(0),
w(0) = x(0).
Относительно функции U1(w,w˙ ) предполагаем, что она дважды непрерывно
дифференцируема и удовлетворяет условиям U1(0, 0) = 0 и ∂U1/∂w(0, 0) < 0,
∂U1/∂w˙(0,0) < 0. Будем также полагать, что управление U1 и скорость эта-
лонной системы ограничены:
|U1(w,w˙ )| ≤ Umax,
∀w,w˙,
w(t)| ≤ Vmax ∀t ≥ 0.
Конкретный вид функции U1 обсуждается в конце статьи в разделе 5. В на-
стоящий момент достаточно знать, что она удовлетворяет сформулирован-
ным выше условиям, из которых, в частности, следует, что начало координат
является положением устойчивого равновесия системы (3), в окрестности ко-
торого функция U1(w,w˙ ) аппроксимируется линейной функцией.
Цель введения эталонной системы определить для тележки с маятни-
ком некоторую “желаемую” (целевую) траекторию, которая задается неявно
управлением U1, и свести задачу к нахождению такого управления U, кото-
рое обеспечит движение тележки в начало координат по траектории, асимп-
тотически приближающейся к желаемой. Максимальная скорость системы
и управляющая сила на практике всегда ограничены. В настоящей рабо-
те ограничения на управление и скорость при синтезе закона управления
не вводились, однако учитывались при планировании траектории: введение
ограничений при стабилизации эталонной системы позволяет получить “ра-
зумную” целевую траекторию, которая может быть реализована (за исклю-
чением, быть может, некоторого начального участка) исходной системой с за-
данными ограниченным управлением и скоростью. Параметры Umax и Vmax
будут также использованы при приведении уравнений движения системы к
безразмерной форме.
98
3. Безразмерная модель
Перейдем к безразмерным переменным. В отличие от большинства посвя-
щенных решению данной задачи работ, где в качестве масштаба времени при-
нимается период колебаний маятника (см., например, [4, 5, 7, 8]), в настоящей
работе в качестве масштаба берется величина l/Vmax, и безразмерные пере-
менные вводятся как
(4)
t=tVmax/l,
x = x/l,
φ
= φ.
Производные по времени в размерных и безразмерных переменных связаны
формулами
dx
V2max d2x
V2max d2φ
φ=Vmaxdφ
(5)
x=Vmax
,
x=
,
,
φ=
dt
l
dt2
l
dt
l2
dt2
Подставляя эти выражения в уравнения (1), (2) и деля первое уравнение на
µV2max/l, а второе на mV2max, получаем уравнения системы в безразмерном
виде:
˜
m
˜
(6)
x+mφ co
φ-
φ2
si
φ=U
,
µ
µ
˜
(7)
xcosφ+
φ-ω2
sin φ = 0,
0
где ω0 - безразмерная круговая частота маятника иŨ - безразмерное управ-
ление,
√g l
√gl
Ul
Ũ=Ugl
ω0 =
≡
,
≡
l Vmax
Vmax
µg V2max
µV2max
Уравнение эталонной системы (3) и ограничения при переходе к безраз-
мерной записи принимают вид:
w= Ũ1,
w(t)| ≤ 1,
|Ũ1( w,w˜)| ≤Ũmax,
Ũmax =Umaxl .
µV2max
Далее в статье все уравнения приводятся в безразмерном виде и, чтобы из-
бежать громоздкости, тильду над символами опускаем.
Разрешая систему (6), (7) относительно старших производных, получим
[
]
1
m
(8)
x=
φ2 sin φ -mω20 sin φcos φ + U ,
γ
µ
µ
[
]
1
m
(9)
φ=
-
φ2 sin φ cos φ + ω20 sin φ - cos φ · U ,
γ
µ
где
m
(10)
γ ≡ γ(φ) = 1 -
cos2
φ.
µ
99
4. Синтез стабилизирующего управления
4.1. Замена переменных
Сделаем замену переменных в φ-подсистеме и запишем уравнения (8)-(9)
в виде системы уравнений первого порядка. Для этого введем новые пере-
менные состояния
x1 = x, x2 = x, x3 = ω20 tan φ, x4 = ω20φ˙/cos2 φ
и обозначение X = [x1, . . . , x4]. В новых переменных (для компактности за-
писи здесь и далее будем применять смешанные обозначения, т.е. наряду с
новыми переменными в правых частях уравнений использовать старые) си-
стема (8)-(9) принимает вид
x1 = x2,
[
]
1
m
x2 =
φ2 sin φ -mω20 sin φcos φ + U ,
(11)
γ
µ
µ
x3 = x4,
x4 = fφ(φ,φ) + gφ(φ)U,
где, с учетом формулы x4 = ω20
φ + 2 φ2 tanφ)/cos2 φ,
[
)]
φ2 tan(φ)(
m
ω20
fφ(φ,φ) =ω0
x3 +
2γ -
cos2 φ
,
gφ(φ) = -
γ cos φ
cos φ
µ
γ cos φ
4.2. Идея подхода
Так как исходная система имеет четвертый порядок, запишем уравнения
эталонной системы также в виде системы четвертого порядка:
(12)
w1 = w2,
w2 = w3,
w3 = w4,
w4 =Ü1,
где w1 и w2 - координата и скорость, w3 и w4 - зависимые переменные,
(13)
w3 = U1(w1,w2), w4 =U1(w1,w2
),
U1
а
и Ü1 - производные по времени функции U1 в силу системы (3). Ре-
шение системы (12) будет решением (3) только при фиксированных началь-
ных условиях для третьей и четвертой переменных, а именно при w3(0) =
= U1(w1(0),w2(0)) и w4(0) =U1(w1(0),w2(0)).
Наряду с (12) рассмотрим еще одну систему (будем называть ее возму-
щенной эталонной системой):
(14)
w1 = w2,
w2 = w3,
w3 = w4,
w4 =Ü1 + β1δ1 + β2δ2,
где β1, β2 > 0 и
δ1 = U1(w1,w2) - w3, δ2 =U1(w1,w2) - w4.
100
Здесь w3 и w4 - независимые переменные, которые могут принимать произ-
вольные начальные значения. Решение системы (14) с начальными условиями
wi(0) = xi(0), i = 1,2,3,4, будем называть целевой траекторией для исход-
ной системы.
Будем искать такое управление U в исходной системе, при котором пра-
вые части четвертых уравнений исходной и эталонной систем совпадают при
подстановке xi вместо wi:
fφ(φ,φ) + gφ(φ)U =Ü1(x1,x2) + β1δ1 + β2δ2.
Подставляя правые части выражений для функций fφ и gφ в левую часть
уравнения, находим:
(
)
φ2
[
]
tan(φ)
m
1
(15) U = x3 +
2γ -
cos2 φ -
γ cos φ
Ü1(x1,x2)+β1δ1 +β2δ2 ,
cos φ
µ
ω2
0
где
(16)
δ1 = U1(x1,x2) - x3, δ2 =U1(x1,x2) - x4.
Подставляя найденное управление U в (11), получаем уравнения замкнутой
системы в виде
x1 = x2,
2 φ2 tan(φ)
1
x2 = x3 +
-
cos φ
U1 + β1δ1 + β2δ2),
(17)
cos φ
ω2
0
x3 = x4,
x4 =Ü1 + β1δ1 + β2δ2,
отличающиеся от уравнений возмущенной эталонной системы только правой
частью второго уравнения. Из вида правой части (17) следует, что поведение
системы, замкнутой управлением (15), не зависит от массовых характеристик
системы и определяется одним параметром ω0 и выбранной функцией U1.
Обратная связь (15) получена с помощью эвристических соображений, так
что предыдущие рассуждения не являются доказательством устойчивости
замкнутой системы (17). В следующем разделе докажем, что функция U1 и
параметры β1 и β2 могут быть выбраны так, чтобы система (17) была ло-
кально устойчива, и найдем область значений параметров, гарантирующих
устойчивость линеаризованной системы.
4.3. Локальная устойчивость замкнутой системы
Для доказательства локальной устойчивости линеаризуем систему (17) в
малой окрестности начала координат четырехмерного пространства состоя-
ний. Согласно предположению функция U1(x1, x2) линейна в окрестности ну-
ля: U1(x1, x2) = α1x1 + α2x2 + o(x1, x2), откуда следует, что матрица линеари-
зованной системы зависит от пяти параметров: ω0, α1, α2, β1 и β2. Ограничим
101
выбор коэффициентов α1 и α2 условием α21 ≥ 4α2, при выполнении которого
начало координат в пространстве переменных x1, x2 будет положением рав-
новесия типа узел, что, в свою очередь, обеспечит монотонное приближение
эталонной системы к целевой точки. Далее, чтобы уменьшить количество па-
раметров, ограничимся случаем вырожденного узла, взяв функцию U1(x1, x2)
вида
(18)
U1 = -λ2x1 - 2λx2 + o(x1,x2
).
Аналогично будем выбирать β1 и β2 из однопараметрического семейства ко-
эффициентов: β1 = ρ2 и β2 = 2ρ, ρ > 0, сведя, таким образом, количество па-
раметров до трех: ω0, λ и ρ.
Дифференцируя (18) в силу системы (3), получим
∂o
U1 = -λ2 x1 - 2λ x2 +∂o
x1 +
x2 =
∂x1
∂x2
(
)
∂o
∂o
∂o
= 2λ3x1 + 3λ2x2 - λ2
x1 +
- 2λ
x2 + o(x1,x2).
∂x2
∂x1
∂x2
Так как (по определению функции o(x1, x2)) ∂o/∂xi → 0 при xi → 0, i = 1, 2,
получаем
U1 = 2λ3x1 + 3λ2x2 + o(x1,x2).
Аналогично дифференцируя второй раз в силу системы, находим
Ü1 = -3λ4x1 - 4λ3x2 + o(x1,x2).
Отсюда правая часть четвертого уравнения принимает в окрестности на-
чала координат вид
Ü1 + β1δ1 + β2δ2 ≈ W1x1 + W2x2 - β1x3 - β2x4,
где
∂Ü1
∂U1
∂U˙1
W1 =
+β1
+β2
= -λ2(β1 - 2β2λ + 3λ2),
∂x1
∂x1
∂x1
∂Ü1
∂U1
∂U˙1
W2 =
+β1
+β2
= -λ(2β1 - 3β2λ + 4λ2).
∂x2
∂x2
∂x2
Введем обозначения
(19)
ξ = ρ/λ, s = (λ/ω0)2.
Оставляя линейные члены в (17) и пренебрегая членами более высокого по-
рядка, после несложных преобразований получим зависящую от двух пара-
метров линеаризованную систему
0
1
0
0
sλ2c1(ξ) sλc2(ξ)
1 + sξ2
2sξ/λ
X
(20)
= AX, A =
,
0
0
0
1
−λ4c1(ξ) -λ3c2(ξ)
-λ2ξ2
-2λξ
102
где
(21)
c1(ξ) = (ξ - 3)(ξ - 1), c2
(ξ) = 2(ξ - 2)(ξ - 1).
Пусть ν - собственное значение матрицы A. Нормируя его на λ, ν = λν,
получаем характеристический полином линеаризованной системы в виде
-λν
1
0
0
sλ2c1
sλc2 - λν
1 + sξ2
2sξ/λ
P (ν) = det(A - νI) =
=
0
0
-λν
1
-λ4c1
-λ3c2
-λ2ξ2
-2λξ - λν
sλc2 - λν
1 + sξ2
2sξ/λ
-
-λν
0
-λν
1
-λ3c2
-λ2ξ2
-2λξ - λν
sλ2c1
1 + sξ2
2sξ/λ
=
-
0
-λν
1
-λ4c1
-λ2ξ2
-2λξ - λν
[
]
(22)
=λ4
ν4 + ν3(2ξ - sc2(ξ)) + ν2(ξ2 - sc1(ξ)) + νc2(ξ) + c1(ξ)
Отметим, что устойчивость характеристического полинома, а следователь-
но, и линеаризованной системы, зависит только от двух параметров s и ξ,
определенных формулой (19), а так как s и ξ не зависят ни от масс маят-
ника и тележки, ни от их отношения, то и область устойчивости не зависит
от массовых характеристик исходной системы. Анализ устойчивости поли-
нома, результат которого сформулирован в следующей теореме, приведен в
Приложении.
Теорема. Линеаризованная система (20) устойчива при любых s и ξ,
принадлежащих области
Ω = {3 < ξ < ∞,0 < s < smax(ξ)},
где
2
ξ2(ξ - 2)2 + 4(ξ - 1)
(23)
smax(ξ) =
ξ(ξ - 1)(ξ - 2)(ξ2 - 3ξ + 3)
Из теоремы следует, что найдется окрестность нуля в 4-мерном простран-
стве такая, что система (17) (система (11), замкнутая обратной связью (15))
устойчива при любом принадлежащем ей начальном векторе X(0).
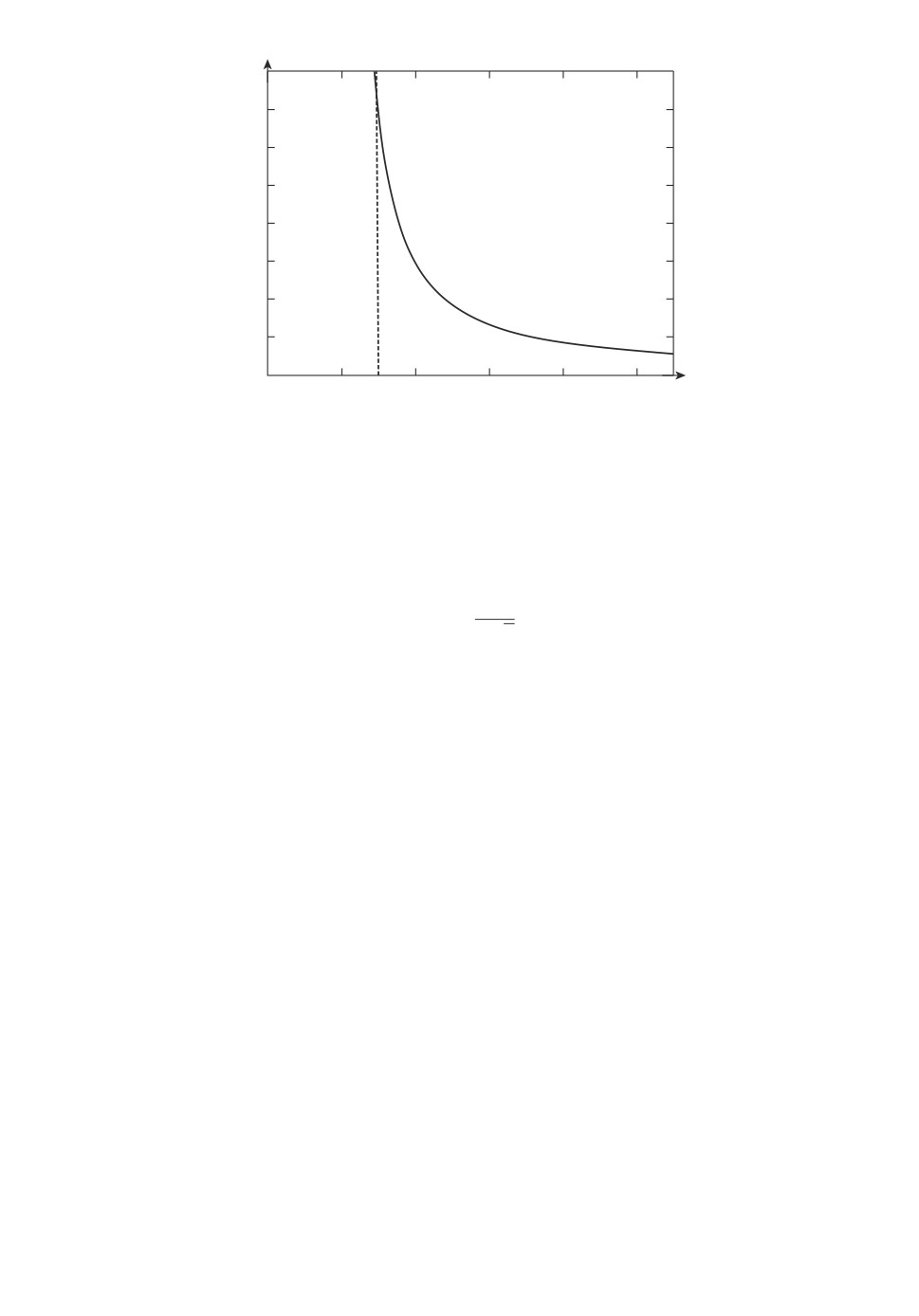
Легко видеть, что smax(ξ) - монотонно убывающая функция при ξ > 3.
Кривая smax(ξ) изображена на рис. 2. Здесь Ω - внутренность области,
ограниченной кривой smax(ξ), горизонтальной осью и вертикальной пря-
мой ξ = 3. Подставляя ξ = 3 в правую часть формулы для smax(ξ), нахо-
дим верхнюю границу значений s, при которых возможна стабилизация:
maxξ smax(ξ) = 25/18. Отсюда получаем ограничение на выбор желаемой экс-
поненциальной скорости убывания отклонения λ:
103
s
1,4
1,2
1,0
0,8
0,6
0,4
0,2
0
2
4
6
8
10
x
Рис. 2. Область устойчивости линеаризованной системы в пространстве пара-
метров s и ξ, определенных формулой (19).
Следствие 1. Система (11) может быть локально стабилизирована
с помощью обратной связи (15), если λ принадлежит интервалу 0 < λ <
< λmax, где
5ω0
(24)
λmax =
√ .
3
2
Из рис. 2 видно, чем больше значение λ, тем меньше диапазон значений ξ
(а значит, и β1, β2), при которых линеаризованная система устойчива.
Следствие 2. Для любых параметров исходной системы (6), (7) и за-
данной скорости λ убывания отклонения из интервала 0 < λ < λmax суще-
ствует ξmax(λ) такое, что обратная связь (15) с коэффициентами β1 = λ2ξ2
и β2 = 2λξ, где ξ ∈ (3,ξmax(λ)), локально стабилизирует рассматриваемую
систему.
5. Управление эталонной системой
Для стабилизации эталонной системы предлагается применять обратную
связь в виде вложенных сигмоидов, позволяющую одновременно удовлетво-
рить фазовые ограничения и ограничения на управление (например, [11, 12]):
(25)
U1(w,w˙) = -k4σ2(k3(w˙ + k2σ1(k1
w))),
где σ1 и σ2 - сигмоиды. Напомним, что сигмоидой называется гладкая моно-
тонно возрастающая функция, меняющаяся от -1 до +1. В семейство функ-
ций класса сигмоид входят такие функции, как арктангенс, гиперболический
тангенс, функция ошибок и многие другие подобного вида. Нетрудно прове-
рить, что функция (25) удовлетворяет всем требованиям, сформулированным
в разделе 2 при k2 = Vmax и k4 = Umax, или в безразмерной записи (см. раз-
дел 3) при k2 = 1 и k4 =Ũmax. С помощью двух оставшиеся коэффициентов
104
k1 и k3 можно регулировать форму кривой и ее наклон в окрестности нуля,
который, в свою очередь, определяет скорость экспоненциального убывания
отклонения вблизи нуля, а также оптимизировать некоторый критерий каче-
ства управления, как, например, в [12]. Легко проверить, что если положить
k1 = λ/2, k3 = 2λ
Umax,
то нулевая точка будет положением равновесия эталонной системы типа вы-
рожденный узел (см. раздел 4.3) с экспоненциальной скоростью убывания
отклонения вблизи нуля λ.
6. Численные примеры
Прежде чем представить результаты численных экспериментов, опишем,
как выбрать параметры закона управления для физической (размерной) си-
стемы. Здесь и далее, чтобы различать размерные и безразмерные парамет-
ры, будем помечать последние тильдой. Для реализации описанного выше
подхода, кроме физических параметров системы и ограничений на скорость
и управление в эталонной системе, требуется выбрать конкретные сигмои-
дальные функции σ1 и σ2. В приведенных здесь численных экспериментах,
результаты которых обсуждаются ниже, в качестве обоих сигмоид использо-
валась функция арктангенса:
σi = (2/π)arctan(x), i = 1,2.
Заметим, что вид сигмоиды влияет на поведение системы вдали от положения
равновесия, в то время как локальная устойчивость зависит только от коэф-
фициентов ki в формуле (25). Коэффициенты k1 и k3 выбираются так, чтобы
обеспечить желаемую экспоненциальную скорость λ приближения к целевой
точке, которая должна принадлежать интервалу (0, λmax). Связь размерно-
го λ(λmax) и безразмерногоλ(λmax) легко определить, рассматривая линеа-
ризацию в окрестности нуля функции U1(x, x), заданной выражением (25), в
размерной и безразмерной записи. С помощью формул (4), (5), связывающих
размерные и безразмерные переменные и их производные по времени, легко
находим: λ =λVmax/l. Отсюда размерные λmax и ω0 связаны тем же соотно-
шением (24), что и безразмерные величины, а значит, чем больше круговая
√
частота маятника ω0 =
g/l, тем больше максимально возможная экспонен-
циальная скорость приближения к целевой точке λmax, при которой локаль-
ная стабилизация уже невозможна.
По заданным физическим параметрам исходной (1), (2) и эталонной (3)
систем и заданому λ определяется безразмерный параметр s = (λ/ω0)2, вы-
бирается значение ξ из диапазона (3, ξmax(λ)) и строится обратная связь по
формуле (15) с коэффициентами β1 = λ2ξ2 и β2 = 2λξ. Умножая полученное
управление на масштабирующий множитель µV2max/l, получаем управление в
исходной размерной системе (1), (2). Как установлено в разделе 4.2, замкну-
тая система (17) не зависит от массовых характеристик исходной системы.
105
1,0
0,5
0
2
4
6
8
10
12
14
-0,5
2
-1,0
4
-1,5
-2,0
-2,5
1
-3,0
3
-3,5
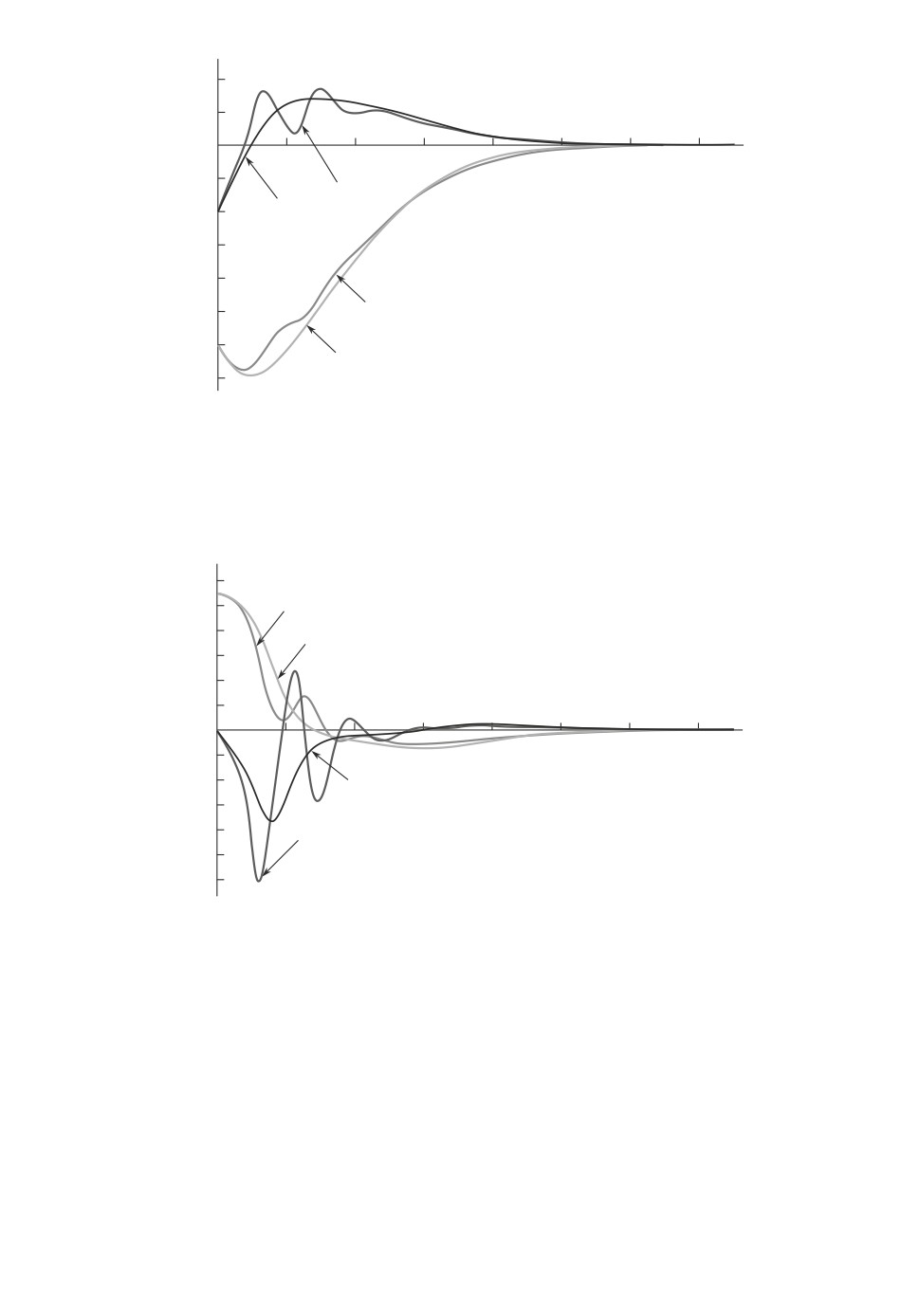
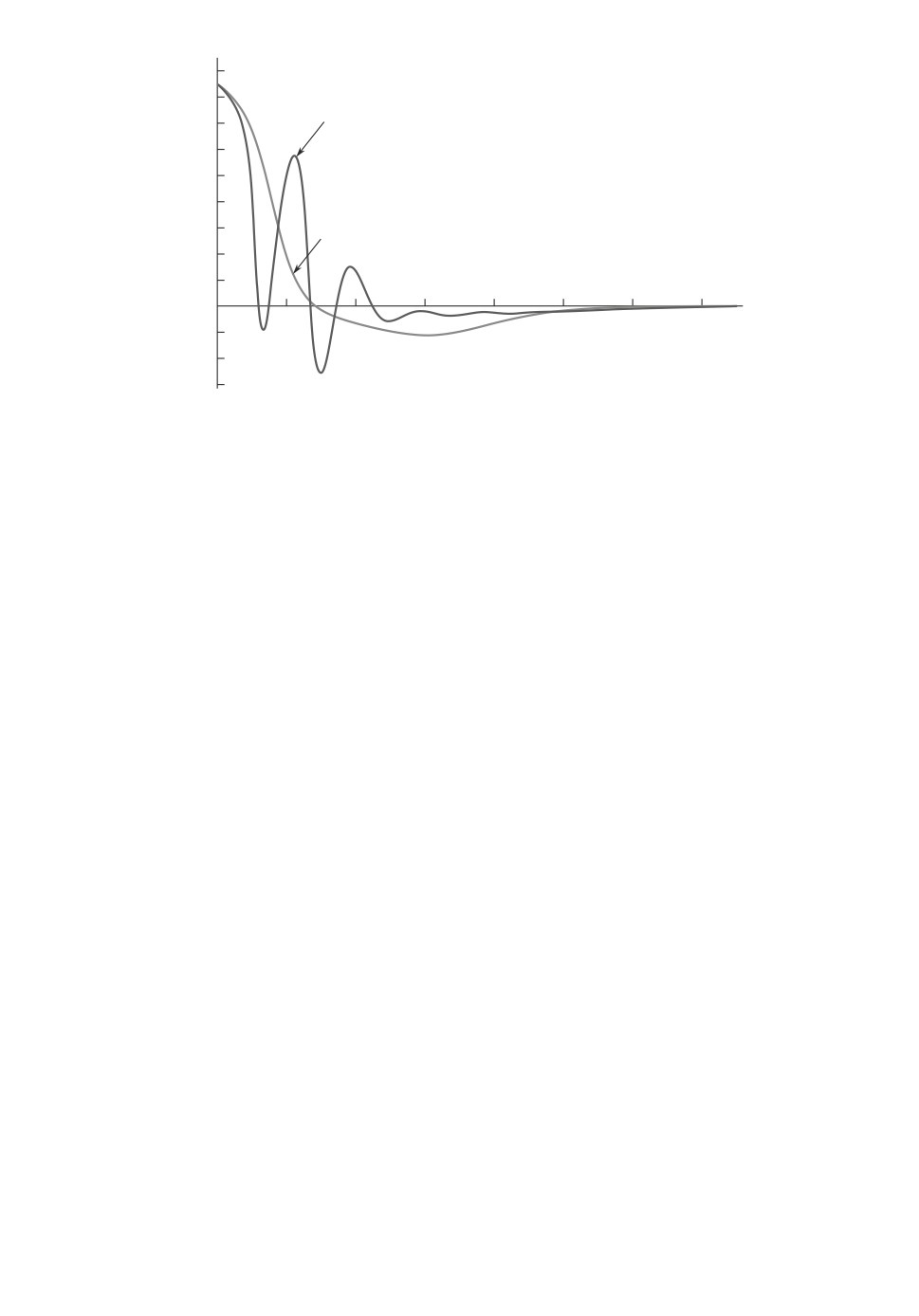
Рис. 3. Стабилизация системы с начальным состоянием x(0) = -3,0,
x(0) = -1,0, φ(0) = 0,5,
φ(0) = 0 при ξ = 4, 0. Зависимость от времени
расстояния до целевой точки (кривые 1 и 3) и скорости тележки
(кривые 2 и 4) для тележки с маятником и возмущенной эталонной
системы соответственно.
1,2
1,0
1
0,8
3
0,6
0,4
0,2
0
2
4
6
8
10
12
14
-0,2
-0,4
4
-0,6
-0,8
2
-1,0
-1,2
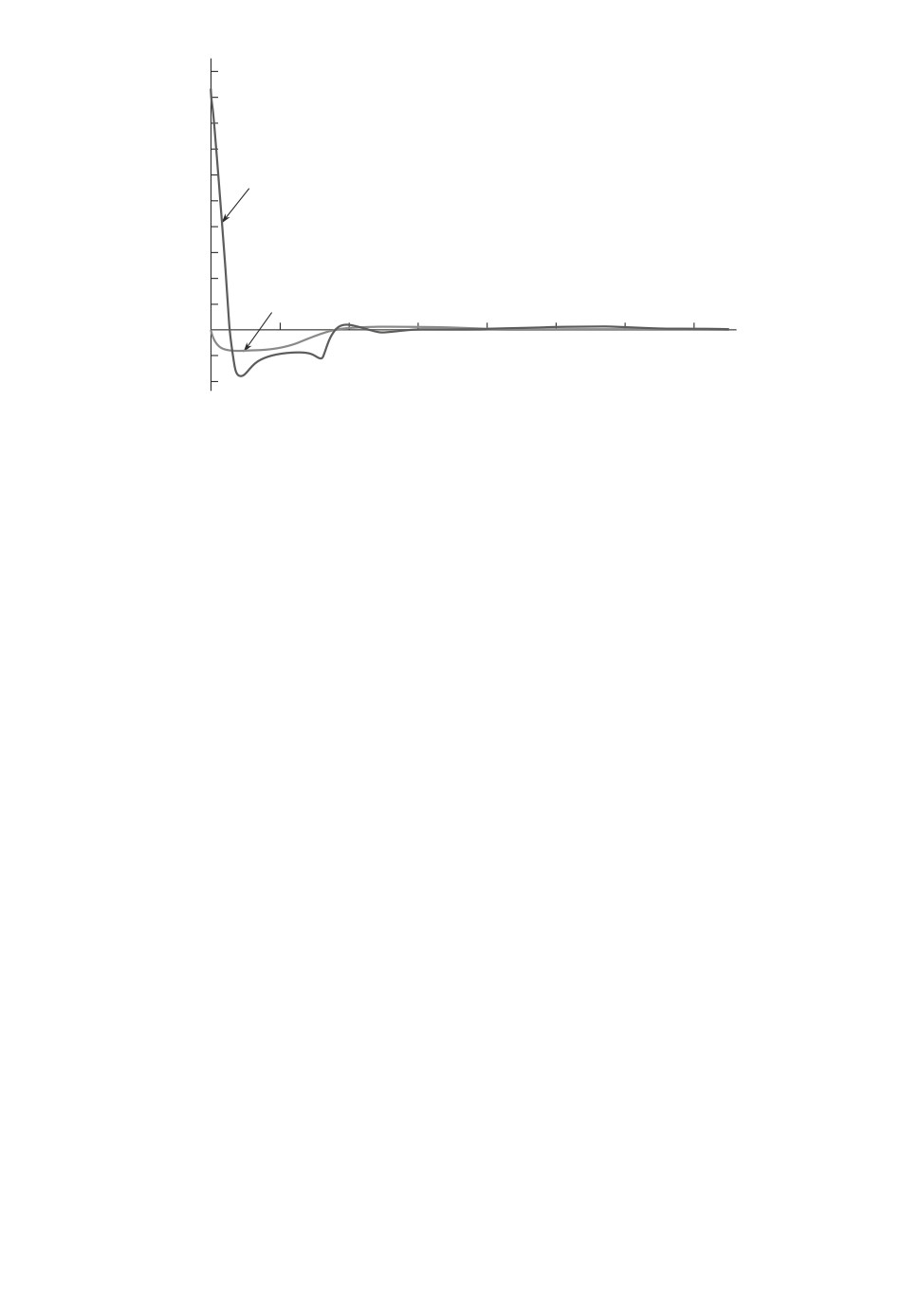
Рис. 4. Стабилизация системы с начальным состоянием x(0) = -3,0,
x(0) = -1,0, φ(0) = 0,5,
φ(0) = 0 при ξ = 4,0. Зависимость от времени
переменных x3 (кривая 1), x4 (кривая 2) (тележка с маятником) и
w3 (кривая 3), w4 (кривая 4) (возмущенная эталонная система).
По этой причине не имеет смысла рассматривать системы с разными отноше-
ниями масс маятника и тележки, так как для таких систем отличаться будут
только графики управлений.
Экспериментально установлено, что область притяжения замкнутой систе-
мы (область начальных значений в четырехмерном пространстве состояний)
зависит от значения ξ ∈ (3, ξmax(λ)) и сложно устроена. Область притяже-
ния уменьшается при увеличении ξ, стягиваясь в точку, когда ξ → ξmax(λ).
106
1,8
1,6
1
1,4
1,2
1,0
0,8
0,6
2
0,4
0,2
0
2
4
6
8
10
12
14
-0,2
-0,4
-0,6
Рис. 5. Стабилизация системы с начальным состоянием x(0) = -3,0,
x(0) = -1,0, φ(0) = 0,5,
φ(0) = 0 при ξ = 4,0. Зависимость от времени
управления U (кривая 1) тележкой с маятником и управления U1
(кривая 2) возмущенной эталонной системой.
При уменьшении же ξ область притяжения растет, расширяясь предположи-
тельно до всего пространства R4 вблизи нижней границы интервала ξ = 3.
Установление зависимости области притяжения от параметра ξ является пер-
востепенной задачей будущих исследований.
Полученный закон управления апробировался в численных экспериментах
для различных параметров и начальных условий. Представленные ниже ре-
зультаты получены для безразмерной системы со следующими параметрами:
m/µ = 1/3, ω20 = 2 иŨmax = 2. Управление U1 в эталонной системе определено
формулой (25) с коэффициентами k1 = 0,5π/2, k2 = 1, k3 = 4k1
Umax = π/2
и k4 = 2. Такие значения коэффициентов соответствуют единичной скоро-
сти экспоненциального убывания отклонения:λ = 1, при этом s = 0,5. Под-
ставляя s = 0,5 вместо smax в левую часть формулы (23) и решая чис-
ленно получившееся уравнение относительно ξ, находим верхнюю границу
ξmax(0,5) ≈ 4,315 диапазона устойчивости линеаризованной системы.
Серия численных экспериментов с различными значениями параметра ξ
и различными начальными условиями подтвердила приведенные выкладки:
для любых значений ξ, принадлежащих интервалу (3, 4,315), нашлось мно-
жество начальных значений переменных, при которых стабилизировалась ис-
ходная нелинейная система, в то время как для всех тестируемых значений ξ
за пределами указанного диапазона система не стабилизировалась.
Приведенные в данном разделе графики показывают результаты двух чис-
ленных примеров. В первом примере (рис. 3-5) ξ = 4,0, x(0) = -3,0, x(0) =
= -1,0, φ(0) = 0,5 rad,φ(0) = 0. На рис. 3 показаны графики отклонения от
целевой точки (кривая 1) и скорости (кривая 2) тележки; кривые 3 и 4 по-
казывают для сравнения графики отклонения и скорости эталонной системы
(целевая траектория). На рис. 4 показана зависимость от времени третьей
107
6
1
5
4
2
3
3
2
1
0
2
4
6
8
10
12
14
4
-1
Рис. 6. Стабилизация системы с начальным состоянием x(0) = x(0) = 0,
φ(0) = 1,0,
φ(0) = 0 при ξ = 3,5. Зависимость от времени расстояния до
целевой точки (кривые 1 и 3) и скорости тележки (кривые 2 и 4) для
тележки с маятником и возмущенной эталонной системы соответствен-
но.
4
3
4
2
2
1
0
2
4
6
8
10
12
14
-1
3
-2
1
-3
-4
-5
-6
Рис. 7. Стабилизация системы с начальным состоянием x(0) = x(0) = 0, φ(0) =
= 1,0,
φ(0) = 0 при ξ = 3,5. Зависимость от времени переменных x3 (кривая 1),
x4 (кривая 2) (тележка с маятником) и w3 (кривая 3), w4 (кривая 4)) (возму-
щенная эталонная система).
(кривая 1) и четвертой (кривая 2) переменных, x3 и x4 = x3; графики соот-
ветствующих переменных w3 и w4 эталонной системы показаны кривыми 3
и 4 соответственно. На рис. 5 показано, как меняются во времени управле-
ния U (кривая 1) в исходной системе и U1 (кривая 2) в эталонной системе
при следовании по целевой траектории.
108
20
18
16
14
12
1
10
8
6
4
2
2
0
2
4
6
8
10
12
14
-2
-4
Рис. 8. Стабилизация системы с начальным состоянием x(0) = x(0) = 0, φ(0) =
= 1,0,
φ(0) = 0 при ξ = 3,5. Зависимость от времени управления U (кривая 1)
тележкой с маятником и управления U1 (кривая 2) возмущенной эталонной
системой.
Во втором примере тележка изначально находилась в целевой точке с нуле-
вой скоростью (x(0) = x(0) = 0) и отклоненным на большой угол маятником
(φ(0) = 1 rad,φ(0) = 0), ξ = 3,5. На рис. 6-8 показаны те же характеристики,
что и в первом примере. Для компенсации большого начального отклонения
маятника в начальный момент времени потребовалась большая управляю-
щая сила (кривая 1 на рис. 8, которая привела к значительному отклонению
тележки от целевой точки (кривая 1 на рис. 6).
7. Заключение
Рассмотрена задача стабилизации движущейся вдоль прямой тележки с
установленным на ней обратным маятником. Предложен новый закон управ-
ления, основанный на введении эталонной системы второго порядка, траекто-
рия движения которой принимается в качестве целевой для тележки с маят-
ником. Проведен исчерпывающий анализ линеаризованной замкнутой систе-
мы, определена область значений параметров закона управления, гаранти-
рующих локальную стабилизируемость системы, и предложен конструктив-
ный метод их выбора.
Численные эксперименты показали, что для заданной системы и заданной
скорости убывания отклонения λ (т.е. при фиксированном параметре s) об-
ласть притяжения мала для больших значений параметра ξ (вблизи верхней
границы) и увеличивается с его уменьшением. Вблизи верхней границы до-
пустимых значений параметра ξ при достаточно небольших отклонениях от
положения равновесия в системе возникают незатухающие колебания. Вбли-
зи нижней границы ξ = 3 область притяжения настолько велика (возможно
расширяется до всего пространства R4), что при любых тестируемых началь-
ных значениях замкнутая система была устойчива.
109
Область притяжения нелинейной системы с устойчивой матрицей линеа-
ризованной системы может быть оценена с помощью квадратичной функции
Ляпунова линеаризованной системы, матрица которой находится решением
известного линейного матричного неравенства. Результаты численных экспе-
риментов, однако, показывают, что область притяжения исследуемой систе-
мы устроена довольно сложно, поэтому любая ее аппроксимация с помощью
эллипсоида в 4-мерном пространстве, на взгляд авторов, будет крайне консер-
вативной. Менее консервативные оценки можно надеяться получить только с
помощью неэллипсоидальных областей. Получение такого рода оценок явля-
ется достаточно сложной задачей, над решением которой авторы в настоящее
время работают. Предполагается, в частности, попробовать применить для
этой цели некоторые из известных из литературы численных методов (см.,
например, [13-15]).
ПРИЛОЖЕНИЕ
Доказательство теоремы. Для нахождения области устойчиво-
сти характеристического полинома (22) можно воспользоваться критериями
Рауса-Гурвица или Льенара-Шипара [16]. Согласно второму критерию, для
того чтобы полином был устойчивым, необходимо и достаточно, чтобы были
положительными все коэффициенты полинома и нечетные главные миноры
матрицы Гурвица. Найдем область в пространстве параметров ξ и s, в кото-
рой эти условия выполнены.
Коэффициент при старшем члене ν4 всегда положителен: a4 = 1. Осталь-
ные коэффициенты с учетом (21) имеют вид
a0 = λ4(ξ - 3)(ξ - 1), a1 = 2λ4(ξ - 2)(ξ - 1),
a2 = λ4[ξ2 - (ξ - 3)(ξ - 1)s], a3 = 2λ4[ξ - (ξ - 2)(ξ - 1)s].
Свободный член a0 и коэффициент a1 оба положительны, когда 0 < ξ < 1 или
ξ > 3. Коэффициенты a2 и a3 положительны в этих интервалах при условии
ξ
(Π.1)
s < s3(ξ) =
(ξ - 2)(ξ - 1)
Минор первого порядка Δ1 = a1 > 0. Подставляя коэффициенты харак-
теристического полинома в формулу для Δ3 = a1(a2a3 - a1) - a0a23, после
несложных преобразований получим
[(
)
(
)
]
Δ3 = 4λ6(ξ - 1)
ξ4 - 4ξ3 + 8ξ2 - 8ξ + 4
-ξ
ξ4 - 6ξ3 + 14ξ2 - 15ξ + 6
s
=
{[
]
}
= 4λ6(ξ - 1)
ξ2(ξ - 2)2 + 4(ξ - 1)2
- ξ(ξ - 1)(ξ - 2)(ξ2 - 3ξ + 3)s
Введем обозначение
2
ξ2(ξ - 2)2 + 4(ξ - 1)
(Π.2)
smax(ξ) =
ξ(ξ - 1)(ξ - 2)(ξ2 - 3ξ + 3)
110
и найдем разность правых частей (Π.2) и (Π.1):
Δs = smax(ξ) - s3(ξ) =
ξ2(ξ - 2)2 + 4(ξ - 1)2 - ξ2(ξ2 - 3ξ + 3)
=
=
ξ(ξ - 1)(ξ - 2)(ξ2 - 3ξ + 3)
2-ξ
=
ξ(ξ2 - 3ξ + 3)
В интервале 0 < ξ < 1 имеем Δ3 > 0 только тогда, когда s > smax. Так как
smax > s3 в этом интервале, неравенства s > smax и (Π.1) несовместны. Таким
образом, в интервале 0 < ξ < 1 характеристический полином неустойчив.
В интервале ξ > 3 при s < smax имеем Δ3 > 0. Так как в этом интервале
smax < s3, справедливо неравенство (Π.1). Таким образом, все условия кри-
терия Льенара-Шипара выполнены. Теорема доказана.
СПИСОК ЛИТЕРАТУРЫ
1.
Неймарк Ю.И. Математическое моделирование как наука и искусство. Нижний
Новгород: Изд-во Нижегород. ун-та, 2010.
2.
Martynenko Y.G., Formal’skii A.M. Controlled pendulum on a movable base //
Mechanics of Solids. 2013. Т. 48. № 1. С. 6-18.
3.
Формальский А.М. Управление движением неустойчивых объектов. М.: Физ-
матлит, 2014.
4.
Getz N.H., Hedrick J.K. An Internal Equilibrium Manifold Method of Tracking for
Nonlinear Nonminimum Phase Systems // ACC Proc. 1995. P. 1-5.
5.
Srinivasan B., Huguenin P., Bonvin D. Global stabilization of an inverted pendu-
lum - Control strategy and experimental verification // Automatica. 2009. V. 45.
P. 265-269.
6.
Lee J., Mukherjee R., Khalil H.K. Output feedback stabilization of inverted pendu-
lum on a cart in the presence of uncertainties // Automatica. 2015. V. 54. No. 4.
P. 146-157.
7.
Teel A.R. A nonlinear small gain theorem for the analysis of control systems with
saturation // Trans. Autom. Contr. IEEE, 1996. V. 41. No. 9. P. 1256-1270.
8.
Gordillo F., Aracil J. A new controller for the inverted pendulum on a cart // Int.
J. Robust Nonlinear Control. 2008. No. 18. P. 1607-1621.
9.
Magni L., Scattolini R., Aström K.J. Global stabilization of the inverted pendulum
using model predictive control // IFAC Proc. V. 35. Iss. 1. 2002. P. 141-146.
10.
Utkin V., Guldner J., Shi J. Sliding mode control in electromechanical systems. 2nd
ed. CRC Press, 2009.
11.
Matrosov I.V., Morozov Yu.V., Pesterev A.V. Control of the robot-wheel with a pen-
dulum // Proc. of the 15th International Conference on Stability and Oscillations of
Nonlinear Control Systems (Pyatnitskiy’s Conference) (STAB), IEEE. 2020. P. 1-4.
12.
Pesterev A.V., Morozov Yu.V., Matrosov I.V. On Optimal Selection of Coefficients
of a Controller in the Point Stabilization Problem for a Robot-wheel// Commun.
Comput. Inform. Sci. (CCIS). 2020. V. 1340. P. 236-249.
111
13. Сергеев В.С. Об одном способе получения оценок областей притяжения с помо-
щью функций Ляпунова, построенных численным методом // Журн. вычисл.
матем. и матем. физики. 1978. Т. 18. № 5. С. 1154-1161.
14. Каменецкий В.А., Построение областей притяжения методом функций Ляпуно-
ва // АиТ. 1994. № 6. С. 10-26.
15. Chiang H.D., Thorp J.S. Stability regions of nonlinear dynamical systems: a con-
structive methodology // IEEE Trans. Automat. Control. 1989. V. 30. No. 12.
P. 1229-1241.
16. Гантмахер Ф.Р. Теория матриц. 5-е изд. М.: Физматлит, 2010.
Статья представлена к публикации членом редколлегии А.И. Матасовым.
Поступила в редакцию 31.05.2021
После доработки 05.08.2021
Принята к публикации 29.08.2021
112