Автоматика и телемеханика, № 1, 2022
Управление в технических системах
© 2022 г. К.Р. АЙДА-ЗАДЕ, д-р физ.-мат. наук, член-корр. НАН Азербайджана
(kamil_aydazade@rambler.ru)
(Институт систем управления НАН Азербайджана, Баку;
Институт математики и механики НАН Азербайджана, Баку),
В.М. АБДУЛЛАЕВ, д-р физ.-мат. наук (vaqif_ab@rambler.ru)
(Азербайджанский государственный университет нефти и промышленности, Баку;
Институт систем управления НАН Азербайджана, Баку)
УПРАВЛЕНИЕ ПРОЦЕССОМ НАГРЕВА СТЕРЖНЯ С
ИСПОЛЬЗОВАНИЕМ ТЕКУЩЕЙ И ПРЕДЫДУЩЕЙ ПО ВРЕМЕНИ
ОБРАТНОЙ СВЯЗИ
На примере процесса нагрева стержня в печи исследуется задача син-
теза управления объектами с распределенными параметрами с обратной
связью. Для формирования значений управляющих воздействий предла-
гается использовать их линейную зависимость от значений состояния в
точках замера как в текущий, так и в предыдущий моменты времени.
Неизвестные коэффициенты, участвующие в этой зависимости управле-
ния от замеренных значений состояния, являются параметрами обратной
связи. Они определяются минимизацией целевого функционала с исполь-
зованием численных методов оптимизации первого порядка. Для этого
получены формулы градиента целевого функционала по параметрам об-
ратной связи. Приводятся результаты численных экспериментов.
Ключевые слова: система с распределенными параметрами, процесс на-
грева, обратная связь, коэффициент усиления, точка контроля, градиент
функционала, параметры обратной связи.
DOI: 10.31857/S0005231022010081
1. Введение
В работе на примере задачи управления нагревом стержня в печи с об-
ратной связью предлагается подход к синтезу управляющих воздействий, ис-
пользующий результаты замера состояния процесса в заданных точках кон-
троля не только в текущий момент времени t, но и в момент t - τ , где τ -
некоторый заданный параметр. Предложена формула линейной зависимо-
сти текущего значения управляющего воздействия от замеренных значений
в точках замера, включающая неизвестные постоянные параметры обратной
связи. В результате задача синтеза управления редуцируется в задачу па-
раметрического оптимального управления распределенной системой с запаз-
дывающим аргументом по определению оптимальных значений параметров
130
обратной связи, участвующих в формулах зависимости значений управлений
от замеренных значений состояний в точках контроля.
Отметим, что в отличие от задач синтеза управления объектами с сосредо-
точенными параметрами, описываемых системами обыкновенных дифферен-
циальных уравнений [1-4], эти задачи для объектов с распределенными пара-
метрами исследованы существенно меньше. Это было связано, во-первых, со
сложностью как исследования самих краевых задач для систем дифференци-
альных уравнений с частными производными, так и численного их решения.
Во-вторых, имелись сложности технического и технологического характера,
связанные с оперативностью, точностью проводимых замеров и обработки
их результатов, в-третьих, отсутствие достаточно эффективных математиче-
ских методов и мощных вычислительных средств для своевременного приня-
тия решения по определению текущих значений управляющих воздействий.
В 60-70-е годы прошлого века в связи с развитием вычислительных
средств и математического аппарата эти работы существенно активизиро-
вались как в теоретическом направлении, так и для практических приложен-
ный. Здесь следует отметить работы [5-11], которыми были предложены раз-
личные подходы к построению систем управления с обратной связью. В ра-
ботах [5, 12, 13] описаны системы управления реальными технологическими
процессами, техническими объектами с распределенными параметрами.
Предлагаемый в данной работе подход, развивающий работы [10, 11] на
случай использования текущих и предыдущих во времени результатов за-
меров, может быть использован для объектов, у которых нет возможности
оперативного замера значений всего вектора состояния или точность замеров
не достаточно высока. Например, при нагреве стержня замер температуры
в его отдельных точках не позволяет судить о текущей динамике (скорости)
процесса нагрева, а измерительная техника, позволяющая это сделать, пока
отсутствует или недостаточно точна.
2. Постановка задачи
Рассматривается задача регулирования температуры стержня длиной l в
печи, состояние которого описывается начально-краевой задачей:
(2.1)
ut(x,t) = a2uxx(x,t) + µ1 [ϑ(t) - u(x,t)] , (x,t) ∈ Ω = (0,l) × (t0
,T],
(2.2)
u(x, t) = u0(x, t; ϕ), ϕ = const, ϕ ∈ Φ ⊂ Rm, x ∈ [0, l], t ≤ t0,
(2.3)
ux(0,t) = -µ2 [ϑ(t) - u(0,t)] , t ≥ t0,
(2.4)
ux(l,t) = µ2 [ϑ(t) - u(l,t)] , t ≥ t0.
Здесь u(x, t) - температура стержня в точке x ∈ [0, l] в момент времени t;
T - длительность процесса управления; u0(x,t;ϕ) - параметрически задан-
ная непрерывная функция, определяющая температуру стержня при t ≤ 0.
Точное значение m-мерного скалярного вектора параметров ϕ не задано, но
известно, что его значения принадлежат заданному компактному множеству
131
Φ ⊂ Rm с заданной функцией плотности ρΦ(ϕ) такой, что
∫
ρΦ(ϕ) ≥ 0, ϕ ∈ Φ,
ρΦ(ϕ)dϕ = 1.
Φ
Заданные коэффициенты µ1, µ2 характеризуют процесс теплопередачи меж-
ду печью и стержнем. Поддержание температуры самой печи осуществляется
управляемым внешним источником тепла, создающего в печи температуру,
определяемую кусочно-непрерывной функцией ϑ(t), удовлетворяющей техно-
логическому ограничению:
{
}
(2.5)
ϑ(t) ∈ V =
ϑ:ϑ≤ϑ
ϑ
,
t ∈ [t0
,T],
значения ϑ, ϑ заданы.
Рассматриваемая задача управления процессом (2.1)-(2.4) заключается в
определении допустимой управляющей функции ϑ(t), приводящей состояние
стержня к заданному состоянию, определяемой непрерывной функцией U(x)
при условии, что в момент времени t0 на стержне имеются точки x ∈ [0, l],
состояние u(x, t0) в которых по каким-либо причинам вышло из требуемого
по технологическим соображениям диапазона температуры на стержне:
(2.6)
u ≤ u(x,t0
) ≤ u.
Предельные значения температуры стержня u, u считаются заданными и
определяются из технологических требований.
Управление ϑ(t) должно доставлять минимум некоторому заданному
функционалу, например следующему:
∫
∫
T
∫
l
JT (ϑ) =
µ(x) [u(x, t; ϑ, ϕ) - U(x)]2 dxdtdϕ +
Φ T-ΔT 0
(2.7)
∫T
+α
[ϑ(t) - Vα(t)]2 dt.
t0
Здесь функция u(x, t; ϑ, ϕ) является решением начально-краевой задачи
(2.1)-(2.3) при заданных допустимых управлении ϑ(t) ∈ V , t ∈ [t0, T ] и на-
чальном условии u0(x, 0; ϕ), ϕ ∈ Φ; µ(x) ≥ 0 - заданная весовая функция;
[T - ΔT, T ] заданный отрезок времени, в течение которого оценивается сте-
пень устойчивости достижения заданного желаемого распределения темпе-
ратуры на стержне; параметры α, Vα(t) введены для регуляризации целевого
функционала задачи.
Функционал (1.7) определяет качество управления множеством (пучком)
функций u(x, t; ϑ, ϕ), являющихся решением дифференциального уравнения
(1.1) и удовлетворяющих краевым условиям (2.3), (2.4), с начальными усло-
виями u0(x, t0; ϕ) при значениях параметра ϕ из заданного множества Φ.
132
Как видно из целевого функционала (2.7), в задаче требуется не только
достичь желаемого распределения температуры U(x) на стержне в заданный
момент времени T - ΔT , но и поддерживать его в течение заданного отрез-
ка времени [T - ΔT, T ]. Такое свойство качества управления требуется, как
правило, в системах оптимального (финитного) регулирования [5].
Пусть в Nc точках ξj стержня непрерывно во времени производятся заме-
ры температуры, ui(t) = u(ξi, t), i = 1, . . . , L, используемые для формирова-
ния текущего значения управления ϑ(t).
В качестве зависимости управления ϑ(t) от замеренных значений исполь-
зуем следующую формулу:
∑
(2.8)
ϑ(t) =
[k1i (u(ξi, t) - U(ξi)) + k2i (u(ξi, t - τ) - U(ξi))] , t ∈ [t0
,T].
i=1
Здесь постоянные k1i, k2i, i = 1, . . . , L, являются оптимизируемыми пара-
метрами обратной связи, определяющими текущие значения управления в
процесса нагрева.
Как видно из (2.8), в формировании управляющего воздействия участву-
ют не только текущие значения температуры в точках замера, но и значе-
ния температуры в этих точках в предыдущий момент времени, а именно
при t - τ. Значение τ задано, и оно назначается в зависимости от точности
проведения замеров и динамики (скорости) протекания процесса: для быст-
ро протекающих процессов τ необходимо назначать малым, а для медленно
протекающих процессов τ выбирается таким, чтобы за промежуток времени
(t - τ, t) изменение состояния процесса существенно превышало как точность
проводимых замеров, так и решения краевой задачи (1.1)-(2.4). Из практи-
ческих соображений предполагается выполнение условия τ < ΔT .
Оптимизируемые параметры k1i, k2i, i = 1, . . . , L, как и в задачах синтеза
управления в системах c сосредоточенными параметрами, будем называть
коэффициентами усиления.
Введя обозначение для заданной функции U(x) Ui = U(ξi), зависимость
(2.8) запишем так:
∑
(2.9)
ϑ(t; K) =
(k1i (u(ξi,t) - Ui) + k2i (u(ξi,t - τ) - Ui)), t ∈ [t0
,T],
i=1
и будем еe использовать в дальнейшем.
Здесь использовано обозначение для оптимизируемых параметров обрат-
ной связи K = (k1, k2) ∈ R2L, k1 = (k11, k12, . . . , k1L), k2 = (k21, k22, . . . , k2L).
Управление с обратной связью ϑ(t), определенное формулой (2.9), в силу
свойства решения дифференциальных уравнений с запаздывающим по вре-
мени аргументом, является не только непрерывным при всех t ∈ [t0, t0 + τ],
но, более того, его гладкость улучшается во времени [13].
Рассмотрим также случай, когда имеется возможность осуществлять за-
меры температуры только в заданные дискретные моменты времени tj+1 =
133
= t0 + jΔt, j = 0,1,... ,Nt - 1, t0 = t0, Δt = (T - t0)/Nt. Значение Δt опре-
деляется технологическими особенностями как самого процесса нагрева, так
и возможностями проведения замеров.
Для управления ϑ(t) в этом случае используем следующую, аналогичную
(1.8), зависимость от замеренных в дискретные моменты времени значений
состояния:
∑
ϑ(t; K) =
(k1i (u(ξi, tj) - Ui) + k2i (u(ξi, tj - τ) - Ui)) ,
(2.10)
i=1
t ∈ [tj,tj + Δt), j = 0,1,...,Nt - 1.
Значение запаздывания τ должно выбираться, естественно, кратным зна-
чению Δt, т.е. τ = σΔt, σ = 1, 2, . . . , и удовлетворять тем же требованиям,
что и при непрерывной обратной связи.
Управление ϑ(t), определяемое зависимостью (2.10) при дискретной об-
ратной связи, непрерывно на интервалах (tj, tj+1), а в моменты времени tj
проведения замеров состояния процесса может претерпевать конечные скач-
ки. Состояние самого процесса нагрева в эти моменты времени изменяется
непрерывно.
Для случая непрерывной обратной связи подставим зависимость (1.9) в
дифференциальное уравнение (2.1) и в краевые условия (2.3), (2.4), получим
уравнение
ut(x,t) = a2uxx(x,t) +
∑
(2.11)
+µ1
[k1i (u(ξi, t) - Ui) + k2i (u(ξi, t - τ) - Ui)] -
i=1
- µ1u(x,t), (x,t) ∈ Ω,
и краевые условия
ux(0,t) = µ2u(0,t) -
(2.12)
∑
-µ2
[k1i (u(ξi, t) - Ui) + k2i (u(ξi, t - τ) - Ui)] , t ≥ t0,
i=1
ux(l,t) = -µ2u(l,t) +
(2.13)
∑
+µ2
[k1i (u(ξi, t) - Ui) + k2i (u(ξi, t - τ) - Ui)] , t ≥ t0.
i=1
Дифференциальное уравнение (2.11) характеризуется следующими осо-
бенностями: во-первых, оно является уравнением с запаздывающим аргумен-
том по времени в фазовой переменной [14]; во-вторых, оно является точечно
нагруженным по временной переменной [15-18]. В-третьих, краевые условия
(2.12), (2.13) имеют запаздывание во времени и являются нелокальными, так
134
как в них участвуют значения искомой функции в промежуточных точках.
Такие условия называют также неразделенными [11, 19]. Работы, в которых
рассматривались начально-краевые задачи одновременно с такими особенно-
стями, авторам не встречались. Использование имеющихся результатов, от-
дельных для каждой из особенностей (метод шагов во времени для систем с
запаздыванием [15] и метод сдвига для нелокальных нагруженных уравнений
[17, 18]), не представляет каких-либо проблем для исследования и численного
решения полученной начально-краевой задачи (2.11)-(2.13). Схема решения
этих задач будет изложена в разделе 4 при описании результатов компьютер-
ных экспериментов на примере иллюстративной задачи.
В случае дискретной во времени обратной связи (2.10) в промежутках
между замерами дифференциальное уравнение (1.1) имеет вид
ut(x,t) = a2uxx(x,t) +
∑
(2.14)
+µ1
[k1i (u(ξi, tj ) - Ui) + k2i (u(ξi, tj - τ) - Ui)] - µ1u(x, t),
i=1
t ∈ [tj,tj + Δt), j = 0,1,...,Nt - 1,
а в моменты времени замеров tj, j = 1,...,Nt - 1 выполняется условие непре-
рывности процесса
(2.15)
u(x, t+i) = u(x, t-i), x ∈ [0, l], i = 1, . . . , Nt
− 1.
Здесь использованы обозначения:
u(x, t+i) = u(x, tj + 0), u(x, t-i) = u(x, tj - 0).
Краевые условия в этом случае будут иметь вид:
ux(0,t) = µ2u(0,t) -
∑
(2.16)
-µ2
[k1i (u(ξi, tj ) - Ui) + k2i (u(ξi, tj - τ) - Ui)] ,
i=1
t ∈ [tj,tj + Δt), j = 0,1,...,Nt - 1,
ux(l,t) = -µ2u(l,t) +
∑
(2.17)
=µ2
[k1i (u(ξi, tj ) - Ui) + k2i (u(ξi, tj - τ) - Ui)] ,
i=1
t ∈ [tj,tj + Δt), j = 0,1,...,Nt - 1.
Ограничение (2.5) на управляющее воздействие, учитывая зависимость
(2.9) и условия на состояние температуры при протекании процесса регули-
рования (2.6), несложно привести к следующим ограничениям на параметры
обратной связи:
∑
(2.18)
(k1i + k2i) (u - Ui) ≤ϑ,
i=1
135
∑
(2.19)
(k1i + k2i) (u - Ui
) ≥ ϑ.
i=1
Ясно, что ограничения (2.18), (2.19) являются линейными по K.
Целевой функционал (2.7) на случай управления с обратной связью запи-
шем в виде
∫
(2.20)
JT (K) = I(K;ϕ)ρΦ
(ϕ)dϕ,
Φ
∫T
∫
l
2
(2.21)
I(K; ϕ) =
µ(x) [u(x, t; K, ϕ) - U(x)]2 dxdt + αK -K
α
,
R2L
T-ΔT 0
где α,
Kα ∈ R2L - параметры регуляризации функционала.
Таким образом, задача оптимального управления процессом нагрева как с
непрерывной, так и дискретной обратной связью заключается в определении
таких параметров обратной связи K ∈ R2L, удовлетворяющих ограничениям
(2.18) при непрерывной и (2.19) при дискретной обратной связи, при кото-
рых совместно с решением соответствующих начально-краевых задач (2.11)-
(2.13), (2.2) и (2.14), (2.2)-(2.4) функционал (2.20), (2.21) принимает мини-
мальное значение.
Исследуемая далее полученная задача относится к параметрическим зада-
чам оптимального управления, поскольку непосредственно оптимизируемым
является конечномерной вектор K ∈ R2L. Специфическими особенностями
дифференциальных уравнений, как указывалось выше, являются наличие
запаздывания во времени у фазовой переменной и точечная нагруженность
по пространственной переменной. Специфика задачи заключается и в целе-
вом функционале (2.20), (2.21), оценивающем на некотором конечном проме-
жутке времени [T - ΔT, T ] поведение множества решений начально-краевой
задачи (пучка-траекторий), параметры ϕ начальных условий u0(x, t0; ϕ) кото-
рых принадлежат множеству Φ. Отметим еще одну важную специфическую
особенность полученной задачи. Несмотря на то что исходная задача опти-
мального управления без обратной связи (2.1)-(2.7) является, как несложно
проверить, выпуклой, задачи как с непрерывной, так и с дискретной обрат-
ной связью являются невыпуклыми. Это видно из зависимостей (2.9), (2.10),
в которых участвуют произведения оптимизируемых параметров K и зави-
сящих от них, в общем случае нелинейно, значений фазовой переменной в
точках замера u(ξi, t), i = 1, . . . , L. Эта особенность важна и требует привле-
чения к ее численному решению каких-либо подходов к отысканию глобаль-
ного оптимума. Одним из таких подходов является применение известных
эффективных методов локальной оптимизации с использованием различных
начальных точек поиска для оптимизируемого вектора K ∈ R2L (метод муль-
тистарта). В следующем разделе будет изложен предлагаемый подход и по-
лучены необходимые формулы для применения эффективных локальных ме-
тодов оптимизации первого порядка.
136
3. Подход к численному решению задачи синтеза управления
Для численного решения полученной задачи параметрического оптималь-
ного управления (2.11), (2.2), (2.12), (2.13), (2.18)-(2.21) с учетом линейности
ограничений (2.18), (2.19) на оптимизируемые параметры, а следовательно,
выпуклости допустимой области параметров K предлагается использовать
метод проекции градиента [20, 21].
(3.1)
Ks+1 = P(2.17),(2.18) (Ks - γs gradK JT (Ks
)) ,
(
)
(3.2)
γs = arg minJT
P(2.18),(2.19)(Ks - γgradK JT (Ks))
,
s = 0,1,...
γ≥0
Здесь gradK JT (K) - 2L-мерной вектор компонент градиента целевого функ-
ционала (2.20), (2.21); γs - величина шага одномерной оптимизации по на-
правлению градиента на s-й итерации, определяемой, например, методом зо-
лотого сечения; K0 - некоторое начальные значение вектора параметров об-
ратной связи (в случае, если оно не удовлетворяет ограничениям (2.18), (2.19),
необходимо его предварительно спроектировать на допустимую область). Для
построения оператора проектирования P(2.18),(2.19)(K) произвольного вектора
K ∈ R2L на допустимую область, определяемую линейными неравенствами
(2.18), (2.19), имеются известные конструктивные формулы [13, 20, 21].
Как было отмечено выше, полученная задача параметрического оптималь-
ного управления может быть многоэкстремальной по оптимизируемым пара-
метрам K, а метод (3.1), (3.2) позволяет отыскивать лишь ближайшую к точ-
ке K0 ∈ R2L точку локального минимума целевого функционала. Поэтому в
приведенных расчетах использовался метод “мультистарта”, заключающийся
в многократном применении итерационной процедуры (3.1), (3.2) для различ-
ных допустимых начальных точек K0. При этом за решение принимается тот
вектор локального минимума K∗, которому соответствует меньшее значение
целевого функционала.
Ясно, что для реализации процедуры (3.1), (3.2) важную роль имеет век-
тор градиента целевого функционала gradK JT (K). Далее в теореме показа-
на дифференцируемость целевого функционала JT (K) и приведены формулы
для компонент его градиента.
Теорема 1. При принятых допущениях на функции и параметры зада-
чи (2.1)-(2.4), (2.7) функционал (2.20), (2.21) задачи управления (2.11), (2.2),
(2.12), (2.13), (2.18)-(2.21) с обратной связью (2.9) дифференцируем по допу-
стимым значениям параметров обратной связи K, а компоненты градиен-
та определяются формулами
T
l
∫
∫
∫
gradk1i JT (K) =
-a2
µ2 (ψ(0,t) + ψ(l,t)) - µ1 ψ(x,t)dx ×
Φ t0
0
(3.3)
(
)
× (u(ξi,t) - Ui) dt + 2 k1i -k1i
ρΦ(ϕ)dϕ, t0 ≤ t ≤ T,
137
l
∫
∫
∫
grad
JT (K) =
-a2µ2(ψ(0,t+τ)+ψ(l,t+ τ))-µ1 ψ(x,t+τ)dx×
k2i
Φ t0
0
(
)
(3.4)
× (u(ξi, t) - Ui) dt + 2 k2i -k2i
ρΦ(ϕ)dϕ,
-τ ≤ t ≤ T - τ,
где u(x, t; ϕ) - решение начально-краевой задачи (2.11)-(213), (2.2); ψ(x, t) -
решение следующей сопряженной начально-краевой задачи при каждом за-
данном допустимом значения параметра ϕ:
(3.5)
ψt(x,t) = -a2ψxx(x,t) + αψ(x,t), t0
≤ t ≤ T - ΔT,
ψt(x,t) = -a2ψxx(x,t) + αψ(x,t) + 2µ(x)(u(x,t;y,ϕ) - U(x)) ,
(3.6)
T - ΔT < t ≤ T,
(3.7)
ψ(x, T ) = 0,
0≤x≤l,
(3.8)
ψx(0,t) = µ2ψ(0,t), t0
≤t≤T,
(3.9)
ψx(l,t) = -µ2ψ(l,t), t0
≤t≤T,
∫l
µ1k1i
ψx(ξ+i,t) = ψx(ξ-i,t) + µ2k1i (ψ(0,t) + ψ(l,t)) +
ψ(x, t)dx,
(3.10)
a2
0
t0 ≤ t ≤ T,
ψx(ξ+i,t + τ) = ψx(ξ-i,t + τ) + µ2k2i (ψ(0,t + τ) + ψ(l,t + τ)) +
l
∫
(3.11)
µ1k2i
+
ψ(x, t + τ)dx, t0 ≤ t ≤ T - τ,
a2
0
(3.12)
ψ(ξ+i, t) = ψ(ξ-i, t), t0
≤t≤T.
В случае дискретной по времени обратной связи в виде зависимости (2.10)
имеет место следующая
Теорема 2. При принятых допущениях на функции и параметры,
участвующие в задаче (2.1)-(2.4), (2.7), функционал (2.20), (2.21) задачи
управления (2.14)-(2.17), (2.2) при дискретной обратной связи (2.8) диффе-
ренцируем по параметром обратной связи K при их допустимых значениях,
компоненты градиента целевого функционала определяются формулами
tj∫+Δt
l
∫
∑
-a2
gradk1i JT (K) =
µ2 (ψ(0, t) + ψ(l, t)) - µ1
ψ(x, t)dx ×
Φ j=0
tj
0
(
)
× (u(ξi,t) - Ui)dt + 2 k1i - k1i
ρΦ(ϕ)dϕ,
tj ≤ t ≤tj + Δt,
138
gradk2i JT (K) =
∫
∫
l
∑
=
-a2µ2(ψ(0,t + τ) + ψ(l,t + τ)) - µ1
ψ(x, t + τ)dx ×
Φ j=0
tj
0
(
)
× (u(ξi, t) - Ui) dt + 2 k2i -k2i
ρΦ(ϕ)dϕ,
tj - τ ≤ t ≤tj + Δt - τ,
а функция ψ(x, t) при каждом заданном допустимом значении парамет-
ра ϕ и соответствующей функции u(x, t; ϕ)решения начально-краевой за-
дачи (2.14)-(2.17), (2.2) определяется решением сопряженной начально-
краевой задачи:
ψt(x,t) = -a2ψxx(x,t) + αψ(x,t),
tj ≤ t ≤tj + Δt - τ, j = 0, 1, . . . , Nt - 1,
ψt(x,t) = -a2ψxx(x,t) + αψ(x,t) + 2µ(x)(u(x,t;y,ϕ) - U(x)) ,
tj + Δt - τ < t ≤tj + Δt,
ψ(x, T ) = 0,
0≤x≤l,
ψx(0,t) = µ2ψ(0,t),
tj ≤ t ≤tj + Δt, j = 0, 1, . . . , Nt - 1,
ψx(l,t) = -µ2ψ(l,t),
tj ≤ t ≤tj + Δt, j = 0, 1, . . . , Nt - 1,
в точках ξi, i = 1,... ,L, при tj ≤ t ≤ tj + Δt должна удовлетворять усло-
виям
tk
∫
∑
ψx(ξ-i,tj) = ψx(ξ+i,tj) - µ2k1i
(ψ(0, τ) + ψ(l, τ)) dτ,
k=1 tk-1
i = 1,...,L, j = 1,...,Nt - 1,
ψ(ξ+i, t) = ψ(ξ-i, t), i = 1, . . . , L,
tk
∫
∑
ψx(ξ+i,tj + τ) = ψx(ξ-i,tj + τ) + µ2k2i
(ψ(0,t + τ) + ψ(l,t + τ)) dt,
k=1 tk-1
tj ≤ t ≤tj + Δt - τ, i = 1, . . . , L, j = 1, . . . , Nt - 1,
а в точках tj, j = 0,1,...,Nt - 1, при x ∈ [0,l] удовлетворять условиям
tj
∫
∫
∑
α
ψ(ξi, t-j) = ψ(ξi, t+j) -
ki
ψ(x, t)dxdt,
a2
ν=1
tj-1
ξν
i = 1,...,L, j = 0,1,...,Nt - 1.
139
Сформируем необходимые условия оптимальности параметров обратной
связи K в вариационной форме.
Теорема 3. Для оптимальности параметров обратной связи K∗ ∈ R2L
в задаче синтеза (2.11)-(2.13), (2.20), (2.21) с непрерывной обратной связью
(2.9) необходимо выполнение условия
(gradKJT (K∗), K - K∗) ≥ 0
для произвольного допустимого вектора K ∈ R2L, удовлетворяющего усло-
виям (2.18), (2.19), где градиент целевого функционала (2.20), (2.21) опреде-
ляется формулами (3.3)-(3.12).
Аналогичную теорему можно сформировать для случая дискретной об-
ратной связи (2.10).
4. Результаты компьютерных экспериментов
Приведем результаты численных экспериментов, полученные при решении
задачи (2.1)-(2.7), для следующих функций и значений параметров, участ-
вующих в постановке задачи:
t0 = 0, T = 2, a = 1, µ1 = µ2 = 1, µ(x) = 1,
l = 1, u0(x,t;ϕ) = ϕ, x ∈ [0,1], Φ = {55,60,65},
ϑ = 10,
ϑ = 1000, ΔT = 1, U(x) = 85, x ∈ [0,1].
При проведении экспериментов время запаздывания τ, число L точек
непрерывного во времени контроля и места их размещения принимали раз-
личные значения. В приводимых далее результатах были использованы сле-
дующие значения параметров: τ = 0,05, L = 2, ξ1 = 0,3, ξ2 = 0,6.
Для реализации итерационной процедуры (3.1), (3.2) использовались по-
лученные выше формулы для компонентов градиента (3.3), (3.4).
Для решения прямой (2.11)-(2.13) и сопряженной (3.5)-(3.12) начально-
краевых задач при заданных текущих значениях параметров обратной свя-
зи K и начальном условии ϕ ∈ Φ использовалась неявная схема метода се-
ток с шагами дискретизации по x и t, соответственно равными hx = 0,01,
ht = 0,01 [22]. Для учета запаздывания τ использовался метод шагов [14].
К нелокальным краевым условиям (2.12), (2.13) прямой задачи и (3.8)-(3.12)
сопряженной задачи после дискретизации применялась схема сдвига условий,
описанная в [18] основанная на идее метода прогонки [23].
С учетом возможности многоэкстремальности функционала (2.20), (2.21)
в качестве начальной точки для итерационной процедуры (3.1), (3.2) исполь-
зовались разные точки, в частности приведенные в табл. 1. В этой же таблице
приведены соответствующие этим точкам значения целевого функционала.
В табл. 2 приведены полученные с применением процедуры (3.1), (3.2)
оптимальные значения параметров обратной связи. Отметим, что при даль-
нейших итерациях процедуры (3.1) оптимизируемые параметры и значение
140
Таблица 1. Начальные значения оптимизируемых параметров k011,k012,k021,k022
и соответствующие значения функционала
N
k011
k012
k021
k022
J0T (K)
1
6,0000
9,0000
7,0000
8,0000
4514,7446001
2
0,5000
0,9000
0,3000
0,6000
4440,8716378
Таблица 2. Полученные значения параметров обратной связи (2.9)
и целевого функционала
N T χ k(∗)11
k(∗)12
k(∗)21
k(∗)22
J(∗)T(K)
0% -0,54691
1,51775
1,36562
1,42903
0,00000042134
1
1% -0,54655
1,50549
1,37056
1,42836
0,00000063847
1
3% -0,53125
1,51231
1,37452
1,44927
0,00000095917
0% -0,54693
1,51773
1,36560
1,42901
0,00000041473
2
1% -0,54827
1,51537
1,36314
1,42821
0,00000052774
3% -0,54949
1,50465
1,35546
1,41236
0,0000091645
0%
0,86006
1,31130
0,65608
1,00734
0,00000042441
1
1%
0,84875
1,30618
0,65785
1,00908
0,00000053893
2
3%
0,85589
1,30355
0,65777
1,00626
0,00000061959
0%
0,86004
1,31128
0,65606
1,00732
0,00000041806
2
1%
0,85746
1,31135
0,64758
1,00563
0,00000062639
3%
0,86481
1,31407
0,66105
1,00586
0,00000724320
функционала практически не изменялись. В этой же таблице приведены
значения параметров обратной связи, полученные процедурой оптимизации
(3.1), (3.2) при условии, что замеры фазового состояния в точках контроля ξi,
i = 1,2 проводятся не точно, а с погрешностью χ%. Замеренные значения с
погрешностью определялись по формуле
u(t) = u(ξi, t) = u(ξi, t)(1 + χs(t)), t ∈ [t0, T ],
где случайные значения s(t) при каждом t ∈ [t0, T ] имеют равномерное рас-
пределение на отрезке [-1; 1] и стандартной программой Randomize.
Как видно из таблицы, параметры обратной связи достаточно устойчивы
к погрешностям проводимых замеров.
Для сравнения предлагаемого подхода к синтезу управления проводились
эксперименты с решением задачи синтеза управления с обратной связью без
использования предыдущих по времени результатов замеров в виде [10]:
∑
(4.1)
ϑ(t; K) =
kij(u(ξi,t) - Ui), t ∈ [t0
,T].
i=1
141
Таблица 3. Начальные значения параметров обратной связи (4.1)
и соответствующие значения целевого функционала
N
k011
k012
J0T (K)
1
6,0000
9,0000
4068,59998
2
0,5000
0,9000
4188,42555
Таблица 4. Полученные значения параметров обратной связи (4.1)
и целевого функционала
N
T
χ
k(∗)11
k(∗)12
J(∗)T(K)
0%
0,75542
2,98977
0,24977233550
1
1%
0,75533
2,98965
0,24982552763
1
3%
0,75512
2,98936
0,25005961886
0%
0,53942
2,74553
0,23500497418
2
1%
0,53891
2,74491
0,23519332257
3%
0,53877
2,74476
0,23525947935
0%
1,64570
2,21322
0,24976508234
1
1%
1,64565
2,21315
0,24985018452
2
3%
1,64522
2,21257
0,24996574232
0%
1,43147
1,96693
0,23500821019
2
1%
1,43110
1,96645
0,23522688761
3%
1,43026
1,96523
0,23564519287
Как видно, в (4.1) для формирования текущего значения управления ϑ(t)
не используется информация о фазовом состоянии в предыдущие моменты
времени.
В табл. 3 проведены значения начальных значений параметров обратной
связи из (4.1), использованные для итерационной процедуры (3.1), (3.2), и
соответствующие значения целевого функционала.
В табл. 4 аналогично табл. 2 приведены полученные оптимальные значе-
ния параметров обратной связи в виде (4.1) при различных уровнях погреш-
ностей χ проводимых замеров.
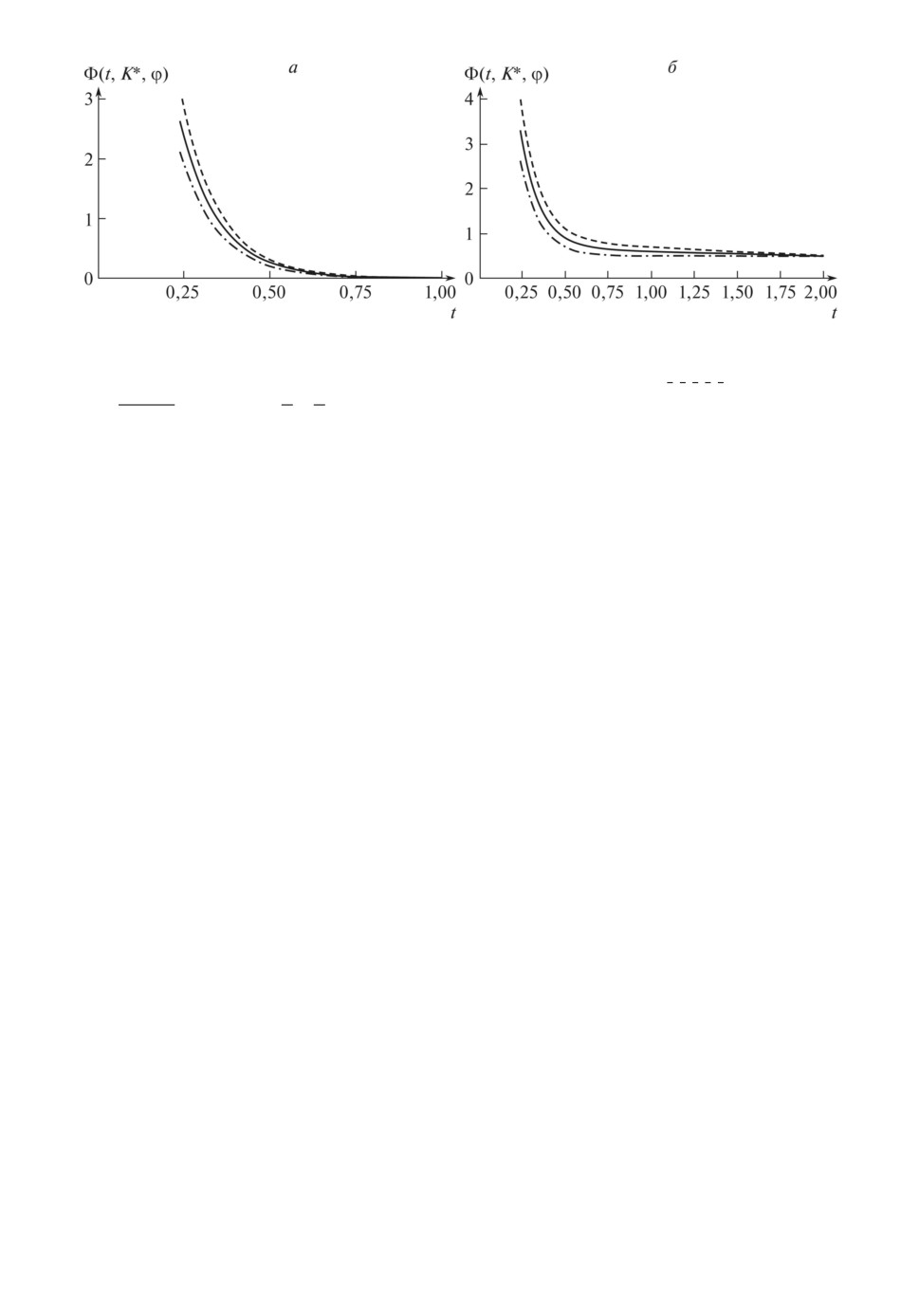
Введем функционал
∫
l
1/2
Φ(t; K, ϕ) =
[u(x, t; K, ϕ) - U(x)]2 dx
,
0
характеризующий состояние процесса нагрева всего стержня в интегральном
смысле, при параметрах обратной связи K и начальном условии u(x, t0) = ϕ.
На рисунке приведены графики функции Φ(t; K∗, ϕ) при оптимальных
значениях параметров K∗, полученные из первой начальной точки K0 (пер-
142
Графики функционала Φ(t; K∗, ϕ). а для обратной связи вида (1.9); б для
обратной связи вида (3.1) для начальных условий: ϕ = 550 (
), ϕ = 600
(
), ϕ = 650
(
·
·).
вая строка табл. 1), с состояниями в начальный момент времени u(x, t0) = 550,
u(x, t0) = 600, u(x, t0) = 650. На рисунке а использованы приведенные в пер-
вой строке табл. 2 полученные оптимальные значения параметров обратной
связи в виде (2.9). На рисунке б использованы приведенные в первой стро-
ке табл. 4 полученные оптимальные значения параметров обратной связи в
виде (4.1).
В случае обратной связи вида (2.9), как видно из рисунка а, графики функ-
ций Φ(t; K∗, ϕ) при t ≥ 0,75 для разных начальных условий устанавливаются
достаточно близко к U(x) = 85, а из рисунка б следует, что установление при
обратной связи вида (4.1) начинает наблюдаться только при t ≥ 1,5.
5. Заключение
На примере процесса нагрева стержня предложен подход к синтезу управ-
ления в системах с распределенными параметрами. Для формирования те-
кущего управления предлагается использовать информацию о состоянии в
точках замера не только в текущий, но и в некоторый предыдущий момент
времени.
Применение такого подхода может быть обусловлено невозможностью про-
ведения замера всех компонентов состояния объекта или объекта в целом.
В работе задача синтеза параметров обратной связи приведена к задаче па-
раметрического оптимального управления, в котором процесс описывается
дифференциальным уравнением с запаздывающими по времени аргумента-
ми.
Получены формулы градиента целевого функционала по параметрам об-
ратной связи, сформулированы необходимые условия оптимальности. Приве-
дены численные эксперименты.
Предложенный подход к синтезу управления в системах с распределенны-
ми параметрами несложно распространить на другие процессы, описываемые
другими видами начально-краевых задач.
143
ПРИЛОЖЕНИЕ
Доказательство теоремы 1. Из взаимной независимости возмож-
ных начальных условий u0(x, t; ϕ) при различных параметрах ϕ имеет место
∫
∫
(Π.1)
gradKJT (K) = gradK I(K; ϕ)ρΦ(ϕ)dϕ = gradKI(K; ϕ)ρΦ
(ϕ)dϕ.
Φ
Φ
Поэтому сначала займемся исследованием дифференцируемости функцио-
нала I(K; ϕ) и получением формул для компонент его градиента по пара-
метрам обратной связи K при каком-либо заданном допустимом параметре
ϕ ∈ Φ.
Для доказательства теоремы воспользуемся известным методом прираще-
ния оптимизируемых параметров и оценки соответствующего приращения
функционала [20].
Пусть вектор параметров обратной связи K = (k1, k2), которому соответ-
ствует решение u(x, t) нагруженной краевой задачи (2.11)-(2.13), получил
приращение
K= K + ΔK = (k1 + Δk1,k2 + Δk2) и этому вектору соответ-
ствует решение краевой задачи ũ(x, t) = u(x, t) + Δu(x, t).
Из (2.11)-(2.13), (2.2) следует, что Δu(x, t) является решением краевой
задачи
∑
Δut(x,t) = a2Δuxx(x,t) + µ1
[k1iΔu(ξi,t) + k2iΔu(ξi,t - τ)]+
i=1
(Π.2)
∑
∑
+µ1
(u(ξi, t) - Ui) Δk1i + µ1
(u(ξi, t - τ) - Ui) Δk2i -
i=1
i=1
− µ1Δu(x,t), (x,t) ∈ Ω = (0,l) × (t0,T],
∑
Δut(0,t) = µ2Δu(0,t) - µ2
[k1iΔu(ξi, t) + k2iΔu(ξi, t - τ)] -
i=1
(Π.3)
∑
-µ2
[(u(ξi, t) - Ui) Δk1i + (u(ξi, t - τ) - Ui) Δk2i] , t ∈ [t0, T ] ,
i=1
∑
Δut(l,t) = -µ2Δu(l,t) + µ2
[k1iΔu(ξi, t) + k2iΔu(ξi, t - τ)] +
i=1
(Π.4)
∑
+µ2
[(u(ξi, t) - Ui) Δk1i + (u(ξi, t - τ) - Ui) Δk2i] , t ∈ [t0, T ] ,
i=1
(Π.5)
Δu(x, 0) = 0, x ∈ [0, l].
Пользуясь известными результатами об устойчивости дифференциальных
уравнений с запаздывающей во времени фазовой переменной и нагружен-
144
ных нелокальных краевых задач, можно показать справедливость оценки
∥Δu(x, t)∥L2(Ω)≤α∥ΔK∥R2L,гдеα>0независитотK[20].
Для приращения функционала (2.19) несложно непосредственно получить
представление:
ΔI(K;ϕ) = I(K + ΔK;ϕ) - I(K;ϕ) =
∫T
∫
l
=2
µ(x) [u(x, t; K, ϕ) - U(x)] Δu(x, t)dxdt +
T-ΔT 0
(Π.6)
∑[
]
+2
σ1(k1i -k1i)Δk1i + σ2(k2i -k2i)Δk2i
+
i=1
(
)
+ R ∥Δu∥L2
,∥ΔK∥R2L
,
(Ω)
(
)
где остаточный член R
∥Δu∥L2(Ω),∥ΔK∥R2Lвключаетслагаемыевторого
порядка малости относительно ∥ΔK∥R2L и ∥Δu∥L2(Ω).Изэтойоценкиприра-
щения функционала следует и его дифференцируемость [20].
Получим формулы для компонентов градиента целевого функционала по
параметрам обратной связи. Пусть функция ψ(x, t) некоторая пока про-
извольная непрерывная всюду в Ω, дважды дифференцируемая по x при
x ∈ (ξi,ξi+1), i = 0,1,...,L, ξ0 = 0, ξL+1 = l, дифференцируемая по t при
t ∈ (t0,T). Умножим (П.2) на ψ(x,t), проинтегрируем результат по прямо-
угольнику Ω. С учетом принятых предположений и условий (П.3)-(П.5) бу-
дем иметь:
∫
T
∫
l
∫
∫
T
∑
ψ(x, t)Δut(x, t)dxdt - a2
ψ(x, t)Δuxx(x, t)dtdx -
i=0
t0
0
ξi t0
l
[
∫T
∫
∑
(Π.7)
-
ψ(x, t) µ1
[k1iΔu(ξi, t) + k2iΔu(ξi
,t - τ)]+
i=1
t0
0
]
∑
+µ1
[(u(ξi, t) - Ui) Δk1i + (u(ξi, t - τ) - Ui) Δk1i] - µ1Δu(x, t) dxdt = 0.
i=1
Используя интегрирование по частям отдельно для первого и второго чле-
нов (П.7) и, учитывая (П.3)-(П.5) , имеем:
T
l
∫
∫
ψ(x, t)Δut(x, t)dxdt =
t0
0
(Π.8)
T
l
∫l
∫
∫
= ψ(x,T)Δu(x,T)dx -
ψt(x,t)Δu(x,t)dxdt,
0
t0
0
145
T
∫
∫
∑
(Π.9)
a2
ψ(x, t)Δuxx
(x, t)dtdx =
i=0
ξi t0
∫T
=a2
[(ψx(0, t) - µ2ψ(0, t))Δu(0, t) - (ψx(l, t) + µ2ψ(l, t))Δu(l, t)] dt +
t0
∫
T
∑
[
]
+a2
ψx(ξ-i,t) - ψx(ξ+i,t) + µ2k1i (ψ(0,t) + ψ(l,t))
Δu(ξi, t)dt +
i=1 t0
∫
∑
[
]
+a2
ψx(ξ-i,t + τ) - ψx(ξ+i,t + τ) + µ2k2i (ψ(0,t + τ) + ψ(l,t + τ))
×
i=1 t0
∫
T
∑
[
]
×Δu(ξi,t)dt + a2
(ψ(ξ+i, t) - ψ(ξ-i, t))Δux(ξi, t)
dt +
i=1
t0
T
∫
∑
+a2
µ2Δk1i
(ψ(0, t) + ψ(l, t)) (u(ξi, t) - Ui) dt +
i=1
t0
∫
∑
+a2
µ2Δk2i
(ψ(0, t + τ) + ψ(l, t + τ)) (u(ξi, t) - Ui) dt +
i=1
t0
∫T
∫
l
+a2
ψxx(x,t)Δu(x,t)dxdt.
t0
0
Используя (П.6)-(П.9), для приращения функционала будем иметь:
∫l
(Π.10)
ΔI(K;ϕ) =
ψ(x, T )Δu(x, T )dx -
0
∫T
[
]
-a2
(ψx(0, t) - µ2ψ(0, t))Δu(0, t) - (ψx(l, t) + µ2ψ(l, t))Δu(l, t) dt +
t0
l
∫
∫
[
]
+
- ψt(x,t) - a2ψxx(x,t) + αψ(x,t) Δu(x,t)dxdt +
t0
0
l
∫T
∫
[
+
- ψt(x,t) - a2ψxx(x,t) + αψ(x,t) +
T-ΔT 0
]
+ 2µ(x)(u(x, t; K, ϕ) - U(x)) Δu(x, t)dxdt +
146
∫
-a2
ψx(ξ-i, t) - ψx(ξ+i, t) + µ2k1i(ψ(0, t) + ψ(l, t)) +
i=1 t0
l
∫
µ1k1i
+
ψ(x, t)dx Δu(ξi, t)dt -
a2
0
∫
∑
-a2
ψx(ξ-i,t + τ) - ψx(ξ+i,t + τ) + µ2k2i (ψ(0,t + τ) + ψ(l,t + τ)) +
i=1 t0
∫
l
µ1k2i
+
ψ(x, t + τ)dx Δu(ξi, t)dt +
a2
0
T
∫
∑
[
]
+a2
(ψ(ξ+i, t) - ψ(ξ-i, t))Δux(ξi, t)
dt +
i=1
t0
l
∫T
∫
∑
-a2
Δk1i
µ2 (ψ(0, t) + ψ(l, t)) +µ1
ψ(x, t)dx ×
a2
i=1
t0
0
(
)
2
× (u(ξi, t) - Ui) dt -
k1i -k1i
-
a2
∫
∫
l
∑
-a2
Δk2i
µ2 (ψ(0,t + τ) + ψ(l,t + τ)) +µ1
ψ(x, t + τ)dx ×
a2
i=1
t0
0
(
) (
)
2
× (u(ξi,t) - Ui)dt -
k2i -k
2i
+ R ∥Δu∥L2(Ω) ,∥ΔK∥R2L
a2
В силу произвольности функции ψ(x, t) потребуем, чтобы она почти всюду
являлась решением начально-краевой задачи (3.5)-(3.12).
Учитывая, что компоненты градиента функционала определяются линей-
ной частью приращения функционала при приращениях соответствующих
аргументов, получаем:
∫T
∫
l
grad I(K; ϕ) =k
-a2
µ2 (ψ(0,t) + ψ(l,t)) - µ1 ψ(x,t)dx ×
1i
t0
0
(
)
× (u(ξi,t) - Ui) dt + 2 k1i - k1i ,
i = 1,...,L, t0 ≤ t ≤ T,
147
l
∫
∫
grad
I(K; ϕ) =
-a2µ2(ψ(0,t+τ)+ψ(l,t+τ))-µ1 ψ(x,t+τ)dx ×
k2i
t0
0
(
)
× (u(ξi, t) - Ui) dt + 2 k2i -k2i ,
i = 1,...,L,
-τ ≤ t ≤ T - τ.
Учитывая (П.1), получим приводимые в теореме выражения для искомых
компонент градиента функционала.
Доказательство теоремы 2 проводится аналогично вышеприведенному с
той разницей, что всюду в проводимых выкладках интегрирование по ин-
тервалу t ∈ [0, T ] заменяется интегрированием по отдельным интервалам t ∈
∈ [ti, ti+1), i = 0, 1, . . . , Nt - 1.
СПИСОК ЛИТЕРАТУРЫ
1.
Егоров А.И. Основы теории управления. М.: Физматлит, 2004.
2.
Mitkowski W., Bauer W., Zagórowska M. Discrete-Time Feedback Stabilization //
Archives of Control Sciences. 2017. V. 27. No. 1. P. 309-321.
3.
Брайсон А., Хо Ю-ши. Прикладная теория оптимального управления. М.: Мир,
1972.
4.
Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление. М.: Наука,
2001.
5.
Бутковский А.Г. Методы управления системами с распределенными парамет-
рами. М.: Наука, 1984.
6.
Aida-zade K.R., Abdullayev V.M. Control Synthesis for Temperature Maintaining
Process in a Heat Supply Problem // Cybern. Syst. Analysis. 2020. V. 56. No. 3.
P. 380-391.
7.
Поляк Б.Т., Хлебников М.В., Рапопорт Л.Б. Математическая теория автома-
тического управления. М.: Ленанд, 2019.
8.
Afifi L., Lasri K., Joundi M., Amimi N. Feedback Controls for Exact Remediability
in Disturbed Dynamical Systems // IMA J. Math. Control Inform. 2018. V. 35.
No. 1. P. 411-425.
9.
Coron J.M., Wang Zh. Output Feedback Stabilization for a Scalar Conservation Law
with a Nonlocal Velocity // SIAM J. Math. Anal. 2012. V. 45. No. 5. P. 2646-2665.
10.
Айда-заде К.Р., Абдуллаев В.М. Оптимизация размещения точек контроля при
синтезе управления процессом нагрева // АиТ. 2017. Т. 78. № 9. С. 49-66.
Aida-zade K.R., Abdullayev V.M. Optimizing Placement of the Ccontrol Points at
Synthesis of the Heating Process Control // Autom. Remote Control. 2017. V. 78.
No. 9. P. 1585-1599.
11.
Айда-заде К.Р., Абдуллаев В.М. Об одном подходе к синтезу управления про-
цессами с распределенными параметрами // АиТ. 2012. № 9. С. 3-19.
Aida-zade K.R., Abdullaev V.M. On an Approach to Designing Control of the
Distributed-Parameter Processes // Autom. Remote Control. 2012. V. 73. No. 2.
P. 1443-1455.
12.
Сиразетдинов Т.К. Оптимизация систем с распределенными параметрами. М.:
Наука, 1977.
13.
Ray W.H. Advanced Process Control. McGraw-Hill Book Company. 1981.
148
14. Эльсгольц Л.Э., Норкин С.Б. Введение в теорию дифференциальных уравнений
с отклоняющимся аргументом. М.: Наука, 1971.
15. Нахушев А.М. Нагруженные уравнения и их применение. М.: Наука, 2012.
16. Алиханов А.А., Березков А.М., Шхануков-Лафишев М.Х. Краевые задачи для
некоторых классов нагруженных дифференциальных уравнений и разностные
методы их численной реализации // Журн. вычисл. матем. и матем. физ. 2008.
Т. 48. № 9. С. 1619-1628.
17. Abdullayev V.M., Aida-zade K.R. Finite-Difference Methods for Solving Loaded
Parabolic Equation // Comput. Math. Math. Phys. 2016. V. 56. No. 1. P. 93-105.
18. Абдуллаев В.М., Айда-заде К.Р. О численном решении нагруженных систем
обыкновенных дифференциальных уравнений // Журн. вычисл. матем. и ма-
тем. физ. 2004. Т. 44. № 9. С. 1585-1595.
19. Abdullayev V.M., Aida-zade K.R. Optimization of Loading Places and Load Re-
sponse Functions for Stationary Systems // Comput. Math. Math. Phys. 2017. V. 57.
No. 4. P. 634-644.
20. Васильев Ф.П. Методы оптимизации. М.: Факториал Пресс, 2008.
21. Поляк Б.Т. Введение в оптимизацию. М.: Ленанд, 2014.
22. Самарский А.А., Николаев Е.С. Методы решения сеточных уравнений. М.: Нау-
ка, 1978.
23. Абрамов А.А. О переносе граничных условий для систем линейных обыкновен-
ных дифференциальных уравнений (вариант метода прогонки) // Журн. вы-
числ. матем. и матем. физ. 1961. Т. 1. № 3. С. 542-545.
Статья представлена к публикации членом редколлегии М.В. Хлебниковым.
Поступила в редакцию 30.07.2021
После доработки 25.08.2021
Принята к публикации 29.08.2021
149