Автоматика и телемеханика, № 10, 2022
© 2022 г. А.Ю. ГОРНОВ, д-р техн. наук (gornov@icc.ru),
А.С. АНИКИН, канд.физ.-мат. наук (anikin@icc.ru),
Т.С. ЗАРОДНЮК, канд. техн. наук (tz@icc.ru),
П.С. СОРОКОВИКОВ (sorokovikov.p.s@gmail.com)
(Институт динамики систем и теории управления
им. В.М. Матросова СО РАН, Иркутск)
МОДИФИКАЦИЯ АЛГОРИТМА ДОВЕРИТЕЛЬНОГО БРУСА,
ОСНОВАННОГО НА АППРОКСИМАЦИИ ГЛАВНОЙ
ДИАГОНАЛИ МАТРИЦЫ ГЕССЕ, ДЛЯ РЕШЕНИЯ
ЗАДАЧ ОПТИМАЛЬНОГО УПРАВЛЕНИЯ1
В работе предложен подход к исследованию стандартной задачи опти-
мального управления, основанный на использовании редукции к конечно-
мерной задаче оптимизации с последующим использованием аппроксима-
ции главной диагонали гессиана. Приведены результаты вычислительных
экспериментов по решению вспомогательных задач оптимизации сепара-
бельных, квазисепарабельных функций и функций Розенброка-Скокова.
Ключевые слова: алгоритм доверительного бруса, квазисепарабельная
функция, матрица Гессе, задача оптимального управления.
DOI: 10.31857/S0005231022100117, EDN: ALGZQW
1. Введение
Задачи оптимального управления (ЗОУ) возникли из стремления учесть
ограничения на управляющие воздействия и фазовые координаты объек-
тов, динамика которых описывается системами обыкновенных дифферен-
циальных уравнений. Эта область исследований, подобно другим направле-
ниям теории экстремальных задач, возникла в связи с запросом со сторо-
ны приложений: появление постановок задач автоматического регулирова-
ния с ограничениями на управления (А.А. Фельдбаум [15], Д.В. Бушау [3]),
которые уже не укладывались в теорию вариационного исчисления. Хотя
первые подобные постановки точечно возникали и ранее (например, задача
Р. Годдарда (1919 г.) о подъеме ракеты на заданную высоту с минимальны-
ми затратами топлива), активное развитие этого направления традиционно
связывают с появлением фундаментальных принципов теории оптимального
управления: принципа максимума [14] и метода динамического программиро-
вания [7]. Сейчас теория оптимального управления активно развивается как
в связи с наличием трудных и интересных математических постановок, так и
с обилием приложений, в том числе и в таких областях, как космонавигация,
1 Работа выполнена за счет субсидии Минобрнауки России в рамках проекта ¾Теория
и методы исследования эволюционных уравнений и управляемых систем с их приложе-
ниями¿ (№121041300060-4).
122
робототехника, динамика полета, экономика, биология, медицина, ядерная
энергетика, нанофизика и других.
Несмотря на активные исследования этой области стандартная ЗОУ с па-
раллелепипедными ограничениями на управление по-прежнему довольно ча-
сто возникает на практике и может характеризоваться наличием особенно-
стей, требующих использования специализированных подходов к их рассмот-
рению.
2. Задачи оптимального управления:
стандартная постановка
Разбиение переменных на фазовые и ограниченное управление, при на-
личии связывающих их дифференциальных уравнений стандартная мо-
дель для процесса, развивающегося по законам природы, но испытывающе-
го управляющие воздействия, стремящиеся сделать его в некотором смысле
оптимальным. Наличие параллелепипедных ограничений на управления воз-
никает естественным образом в силу ограниченности имеющихся ресурсов
и присутствует в стандартной постановке задачи оптимального управления.
Управляемая динамическая система с начальными условиями описывается
дифференциальными уравнениями в нормальной фоме Коши:
(1)
x = f(x(t),u(t),t), x(t0) = x0, t ∈ [t0,t1
],
где t независимая переменная (время), x(t) вектор фазовых координат
размерности n, x = dx/dt производная фазовой траектории, u(t) r-вектор
управляющих воздействий, x0 вектор начального состояния системы. До-
пустимые управления это вектор-функции, определенные на временном
отрезке T и удовлетворяющие ограничениям:
(2)
u(t) ∈ U = {u(t) ∈ Rn
: u ≤ u(t) ≤ u}.
Задача состоит в поиске допустимого управления u∗(t), доставляющего ми-
нимум терминальному функционалу, зависящему от траектории системы (1)
в конечный момент времени t1
(3)
I(u) = ϕ(x(t1
)) → min .
Допустимый процесс (u, x), u = u(t) ∈ U, на котором функционал минимален,
называется оптимальным (u∗, x∗). Вектор-функция f(x(t), u(t), t) и скаляр-
ная функция ϕ(x) предполагаются непрерывно дифференцируемыми по всем
аргументам, кроме t. Постановки с интегральными и смешанными функцио-
налами (задачи Больца и Лагранжа) путем введения дополнительных фазо-
вых координат могут редуцироваться к представленной задаче Майера. Для
подобных детерминированных задач, в которых уравнения движения, крите-
рий качества и ограничения известны точно, оптимальное значение критерия
качества (3), реализуемое в классе программных управлений и управлений
по принципу обратной связи, является одним и тем же. ЗОУ в данной фор-
мулировке считается классической [12, 16] и часто встречается в различных
приложениях.
123
3. Традиционные подходы к исследованию
стандартной ЗОУ
В теории оптимального управления принято различать два типа числен-
ных подходов: прямые (direct) и непрямые (indirect). Прямые методы заклю-
чаются в дискретизации состояния и управления и тем самым сводят исход-
ную задачу к задаче нелинейной оптимизации с ограничениями. Непрямые
методы состоят из численного решения краевой задачи, вытекающей из при-
менения принципа максимума Понтрягина, и приводят к методам стрельбы
(или методам пристрелки shooting methods). В связи со значительными
трудностями построения аналитического решения прикладных задач опти-
мального управления ключевое значение приобрели различные приближен-
ные и численные методы их исследования. В зависимости от алгоритмической
основы метода он может быть отнесен к той или иной группе.
3.1. Методы, основанные на использовании
принципа максимума Понтрягина
В непрямых методах вместо предварительной дискретизации, как в пря-
мых методах, сначала применяется принцип максимума Понтрягина (ПМП)
как условие первого порядка к задаче оптимального управления. Согласно
этому принципу оптимальную траекторию следует искать среди соответст-
вующих экстремалей, для которых он выполняется. Подобные подходы могут
опираться на сведение исходной задачи к краевой задаче нахождения экстре-
мального решения сопряженной системы. Решить такую нелинейную систему
из n уравнений с n неизвестными на практике можно, например, с помощью
методов ньютоновского типа. Таким образом, ПМП является универсальным
необходимым условием оптимальности первого порядка в стандартной ЗОУ.
Традиционно он наиболее эффективен в системах управления с максималь-
ным быстродействием и минимальным расходом энергии, где применяются
управления релейного типа, принимающие крайние, а не промежуточные зна-
чения на допустимом интервале управления.
Построение вычислительных схем, основанных на применении ПМП, мо-
жет опираться на следующие этапы: а) формируется и решается систе-
ма уравнений из условия равенства нулю градиента функции Понтрягина;
б) в критических точках исследуется на знакоопределенность матрица вто-
рых производных, в случае ее положительной определенности получается
точка строгого локального минимума, отрицательно определенная матри-
ца характеризует локальный максимум; в) анализируются критические точ-
ки, в которых матрица вторых производных не является знакоопределенной;
г) найденные точки локальных экстремумов исследуются на глобальный экс-
тремум, если это возможно.
Для линейно-выпуклых задач оптимального управления выполнение усло-
вия максимума функции Понтрягина является и достаточным условием оп-
тимальности, и может быть использовано для нахождения глобального ми-
нимума функционала. В общем случае, когда правые части системы и подын-
тегральная функция критерия качества дифференцируемы по управлениям,
может использоваться линеаризованный или дифференциальный принцип
124
максимума [8, 9], часто применяемый в вычислительных схемах для проверки
оптимальности полученного в результате итерационного процесса решения.
Методы последовательных приближений для поиска управлений, удовлетво-
ряющих линеаризованному ПМ, опираются на использование информации
о градиенте функции Понтрягина и применяются, фактически, для реше-
ния конечномерных задач максимизации гамильтониана в заданных точках
временного отрезка. Важно помнить, что принцип максимума как необхо-
димое условие оптимальности, вообще говоря, порождает не оптимальные
траектории, а экстремали, для которых требуется отдельно обосновывать оп-
тимальность. Для этой цели могут быть использованы достаточные условия
оптимальности.
3.2. Методы, опирающиеся на дискретизацию ЗОУ
Для использования многочисленных существующих прямых методов необ-
ходимо выбирать конечномерные представления управления и состояния,
а затем дискретно выражать дифференциальные уравнения, описывающие
динамическую систему, критерий минимизации и присутствующие в зада-
че ограничения. После того, как все статические и динамические ограни-
чения редуцированы к задаче с конечным числом переменных, необходимо
решить полученную задачу оптимизации, используя какой-либо адаптиро-
ванный метод.
В качестве примера можно привести самый простой способ дискретизации,
основанный на равномерном разбиении временного отрезка на подынтервалы.
Управления дискретизированы таким образом, чтобы являться кусочно-по-
стоянными на каждом подынтервале и удовлетворять заданным ограниче-
ниям. Самым простым методом дискретизации обыкновенных дифференци-
альных уравнений для численной реализации (в том числе для организа-
ции параллельных вычислений) является стандартный явный метод Эйлера.
Множество допустимых управлений можно также дискретизировать, напри-
мер, кусочно-постоянными функциями или сплайнами, а обыкновенные диф-
ференциальные уравнения аппроксимировать дискретными соотношениями с
использованием методов типа Рунге-Кутты различных порядков. В результа-
те из непрерывной задачи оптимального управления получаем задачу конеч-
номерной минимизации, в которой переменные подчиняются ограничениям,
вытекающим из дифференциальной системы и ограничений на управления.
В плане соответствия редуцированной задачи исходной можно утверждать
следующее: стандартная задача оптимального управления характеризует-
ся управляющими воздействиями кусочно-непрерывного типа, соответствую-
щая фазовая траектория является кусочно-гладкой и при выполнении усло-
вия роста с учетом ограничений на управления можно с уверенностью счи-
тать, что соответствующая конечномерная задача, полученная путем дискре-
тизации, будет поддаваться численному решению с использованием методов
конечномерной оптимизации при небольших размерностях. Это связано с на-
личием дифференциальной связи фазовых координат и управляющих воз-
действий, которая позволяет получать редуцированные конечномерные за-
дачи с адекватными свойствами. Непрерывная дифференцируемость правых
частей системы дифференциальных уравнений по фазовым переменным и
125
выполнение соответствующего условия Липшица позволяют обеспечить су-
ществование и единственность решения в задаче Коши для любого допусти-
мого управления.
4. Модификация алгоритма доверительного бруса
Предлагаемый алгоритм основан на использовании информации о главной
диагонали матрицы Гессе. Потому как использование полного гессиана при
реализации алгоритмов может оказаться не слишком рентабельной операци-
ей. Помимо большого объема памяти, требуемой для размещения матрицы
Гессе, вычисление информации второго порядка может оказаться достаточно
трудоемкой задачей при недоступных аналитических формулах для вторых
производных. В такой ситуации обычно используются варианты разностных
схем либо второго порядка, опирающихся на алгоритм вычисления функ-
ции, либо первого порядка, основанных на вычислении вектора градиентов.
В отличие от классических методов ньютоновского типа в реализованном
алгоритме используются элементы только главной диагонали матрицы Гессе
и для нахождения направления движения на каждой итерации формулиру-
ется и решается задача квадратичного программирования на брусе. Решение
этой вспомогательной задачи, в данном случае сепарабельной, тривиальное и
получается в замкнутом виде, что позволяет достичь как хорошей скорости,
так и достаточно высокой точности. Заметим, что от классических методов
доверительного интервала (см., например, [6]) реализованный подход отлича-
ется способом ограничения вариации на каждой итерации: вместо эллипсои-
дального ограничения в данном случае применяется брусовое. Это влечет за
собой другую постановку вспомогательной задачи и, очевидно, другие свой-
ства общего алгоритма.
Реализованные варианты алгоритма используют аппроксимацию диагона-
ли с помощью двух градиентов (V ar1, [11]) и классическую аппроксимацию
по разностной схеме второго порядка (V ar2, см., например, [13]). Помимо оп-
тимизации памяти такой подход существенно ускоряет решение внутренней
задачи линейной алгебры, которая в таком случае становится тривиальной.
Для обеспечения способности алгоритма генерировать улучшающие итера-
ции с любой начальной точки, в конструкции используется техника криво-
линейного шага поиска [11]. Алгоритм позволяет быстро находить решение в
классе квазисепарабельных функций, особенно на функциях с диагональным
преобладанием в матрице Гессе [1].
Для вспомогательной процедуры одномерного поиска в зависимости от
трудоемкости обработки матрицы Гессе может использоваться как грубый
алгоритм одномерного поиска, начинающий итерации с единичного шага,
и дробящий шаг до достижения релаксирующего приближения, так и спе-
циализированный высокоточный алгоритм локального одномерного поиска
(в разработанном подходе комбинация методов золотого сечения и обрат-
ной параболической интерполяции (см., например, [2, 10]). В обоих реализо-
ванных вариантах алгоритма вспомогательные поисковые методы опираются
на использование квадратичной вариационной конструкции, приводящей к
аппроксимации ¾ньютоновской¿ точки при единичном шаге и приближаю-
щейся к направлению антиградиента при малых шагах (см. алгоритм 1).
126
Алгоритм 1. Алгоритм доверительного бруса
Require: Задаются алгоритмические параметры, выбираются x0, δK = δstart.
1:
for K = 0, . . . , Tout do
2:
if
∇f(xK )<= εng then
3:
x∗ = xK
4:
brake
5:
end if
6:
if V ar1 then
7:
Вычисляется аппроксимация ZK диагонали гессиана
с помощью алгоритма, основанного на градиентах
с шагом сдвига αD
8:
end if
9:
if V ar2 then
10:
Вычисляется аппроксимация ZK диагонали гессиана
с использованием алгоритма, основанного на разностной схеме
с шагом Stdif
11:
end if
[
[
12:
BK =
xK - δK,xK + δK
13:
pk = arg min pZKp - ∇f(xK)p, p ∈ BK
14:
x(α) = xK + α2pK - α(1 - α)∇f(xK ).
15:
αK = arg minα∈[0,1] f(x(α)).
16:
xK+1 = xK + α2KpK - αK(1 - αK)∇f(xK).
17:
if αK < 0,5 then
18:
δK = 0,9δK
19:
if δK < δmin then
20:
δK = δstart
21:
end if
22:
end if
23:
if αK > 0,5 then
24:
δK = 1,1δK
25:
if δK > δmax then
26:
δK = δstart
27:
end if
28:
end if
29:
end for
Выход: x∗ если было достигнуто условие досрочного завершения, иначе
xTout+1.
Влиять на вычислительные свойства программной реализации предло-
женного алгоритма можно путем изменения значений алгоритмических па-
раметров. К общим алгоритмическим параметрам для двух реализован-
ных вариантов [тносятся:] εng
точность критерия остановки по нор-
ме градиента
10-12, 100
, в качестве стандартного значения выбирает-
ся 10-5; α0
начальный шаг одномер[ого пои]ка, принимающий на стар-
те наибольшее значение из интервала
10-10, 1
; toln
точность одномер-
127
[
]
ного поиска выбирается из интервала
10-12, 0,1
и задается равной 10-4;
[
]
εfi
точность критерия остановки по релаксации ∈
10-15, 100
и выбира-
ется по умолчанию равной 10[-6; δstart] начальный размер доверительных
брусов
0,1,
из интервала
10-6, 10
; δmin минимальный размер довери-
[
]
тельных брусов
10-4,
10-12, 1
; δmax максимальный размер доверитель-
[
]
ных брусов выбирается из интервала
10-6, 103
равным 10.
К специализированным алгоритмическим параметрам для первого вари-
ан[та отно]ится шаг сдвига от точки первого градиента до второго αd = 0,1 ∈
∈
10-6, 1
. Для второго варианта алгоритма - шаг численного дифференци-
[
]
рования Stdif, принимающий значение из интервала
10-12, 1
, стандартное
значение равно 10-10. Настройка значений алгоритмических параметров мо-
жет повысить эффективность программной реализации алгоритма для вы-
бранного класса задач.
5. Вычислительные эксперименты
Расчеты проводились на персональном компьютере, тактовая частота про-
цессора 2.8GHz, Intel Core i7. Использован компилятор BCC 5.5 под управле-
нием виртуальной машины MaC OS, Windows XP. Для исследования свойств
реализованного алгоритма сформирована небольшая коллекция тестовых за-
дач, включающая: тестовые примеры cепарабельных и квазисепарабельных
функций, а также функции Розенброка-Скокова [5], ориентированные на
сравнение и исследование свойств программных реализаций предложенного
алгоритма.
5.1. Результаты решения вспомогательной задачи
конечномерной оптимизации
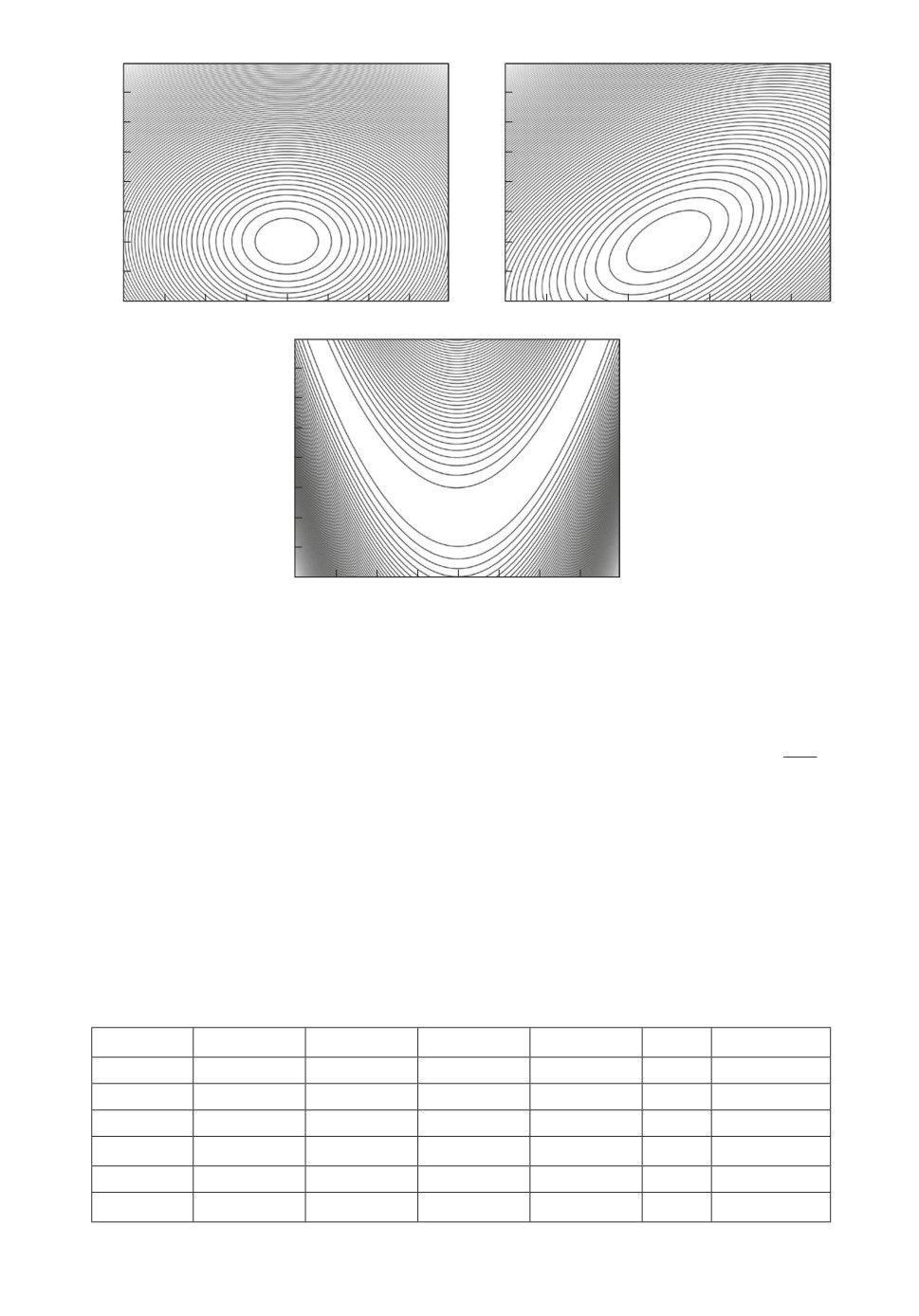
5.1.1. Сепарабельная функция. Наиболее простая по структуре функ-
ция это первая тестовая функция, на которой можно проверить работо-
способность алгоритмов оптимизации и сравнить их свойства (рис. 1). Раз-
мерность данной задачи легко изменяется (вычислительные эксперименты
проводились в том числе для Large-size problem (табл. 1).
∑
f (x) =
x2i → min, x0i = 0,5 + i · 10-6, i = 1,n.
i=1
5.1.2. Квазисепарабельная функция. Сложность квазисепарабельных
функций при изменении значения множителя, входящего в состав второго
слагаемого, может возрастать. Функции данного типа также являются попу-
лярными для проведения вычислительных экспериментов по исследованию
алгоритмов оптимизации (см., например, [4]).
∑
∑
f (x) =
x2i + 0,001
i(xi - xi+1)2 → min, x0i = 1,0 + i · 10-7, i = 1, n.
i=1
i=1
128
2,5
2,5
2,0
2,0
1,5
1,5
1,0
1,0
0,5
0,5
0
0
-0,5
-0,5
-1,0
-1,0
-2,0 -1,5 -1,0 -0,5
0
0,5
1,0
1,5
-2,0 -1,5 -1,0 -0,5
0
0,5
1,0
1,5
2,5
2,0
1,5
1,0
0,5
0
-0,5
-1,0
-2,0 -1,5 -1,0 -0,5
0
0,5
1,0
1,5
Рис. 1. Линии уровня тестовых сепарабельной, квазисепарабельной функций
и функции Розенброка-Скокова.
5.1.3. Функция Розенброка-Скокова.
∑
f (x) = (1 - x1)2 + 100 (xi - x2i-1)2 → min, x0i = -2,0 + i · 10-7, i = 1, n.
i=2
Сравнение работоспособности предложенного алгоритма с авторской биб-
лиотекой алгоритмов оптимизации, включающей программные реализа-
ции методов Ньютона, Барзилаи-Борвейна, Поляка, Бройдена-Флетчера-
Таблица 1. Результаты вычислительных экспериментов для семейства сепара-
бельных функций. Здесь V ar1 результаты расчетов для первого варианта ал-
горитма, V ar2 для второго варианта алгоритма, frec наилучшее достигнутое
значение функции, ng достигнутое значение нормы градиента, iter число
итераций алгоритма
n
5
50
5 · 102
5 · 103
5 · 104
5 · 105
V ar1 frec
0,00
0,00
0,00
0,00
0,00
0,00
V ar1 iter
8
8
8
8
8
8
V ar1 ng
0,0
0,0
0,0
0,0
0,0
0,0
V ar2 frec
1,34 · 10-15
1,33 · 10-11
9,94 · 10-31
2,64 · 10-15
V ar2 iter
8
8
9
9
V ar2 ng
7,3 · 10-8
7,0 · 10-6
3,0 · 10-15
2,0 · 10-7
129
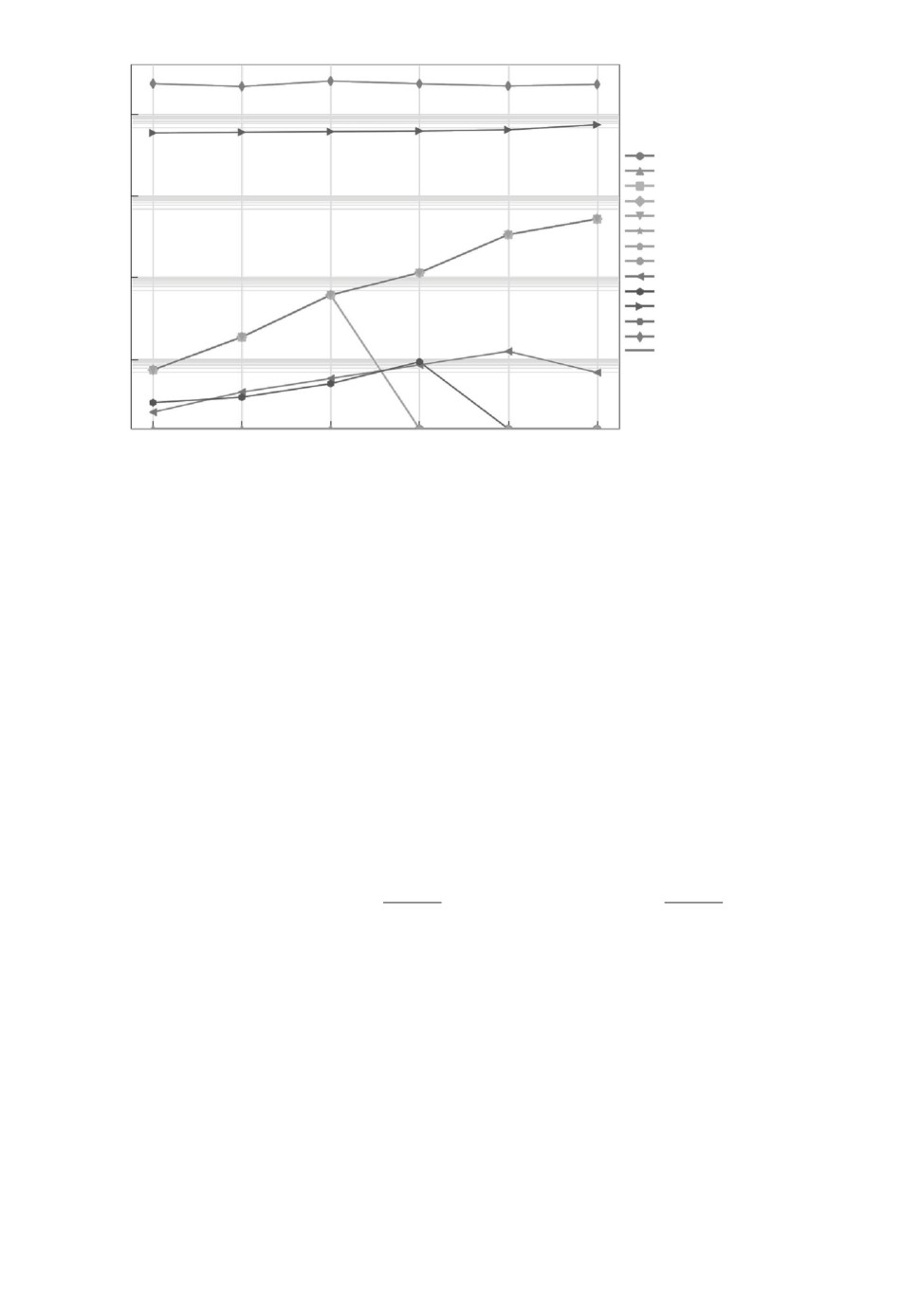
f *
1e-10
Method
BFGS (v1)
Barzilai Borwein (v1)
Couchy (v1)
1e-16
Conjugate Gradient (FR, v1)
Conjugate Gradient (HS, v1)
Conjugate Gradient (Nesterov, v1)
DFP (v1)
LBFGS (v1)
1e-22
Newton (v1)
Polyak (v2)
Raider (v1)
Reduced/Conditional Gradient (v1)
Split Gradient (v1)
Trust Region (v2)
1e-28
2
4
6
N
Рис. 2. Результаты вычислительных экспериментов для библиотеки методов
оптимизации на сепарабельной функции возрастающих размерностей.
Гольдфарба-Шанно и других, отображено на рис. 2. В данном случае тести-
рование проводилось с использованием сепарабельной функции размерности
от 5 до 5 · 105 переменных (табл. 1). Видно, что с использованием предложен-
ной модификации метода доверительных брусов удается решить задачу для
всех рассматриваемых размерностей сепарабельной функции.
5.2. Результаты решения задачи оптимального управления
Приведем пример модельной тестовой задачи оптимального управления
с невыпуклым множеством достижимости, характеризующимся малой обла-
стью притяжения глобального экстремума.
√
√
(4)
x1(t) = u(t) - sin
|x1(t)|,
x2(t) = u(t) + cos
|x1
(t)|,
(5)
x1(t0) = 1, x2(t0
) = 1, u(t) ∈ [-0,45,0,45], t ∈ T = [0,27],
(6)
I(u) = (x1(t1) + 3)2 + (x2(t1) + 0,5)2
↓.
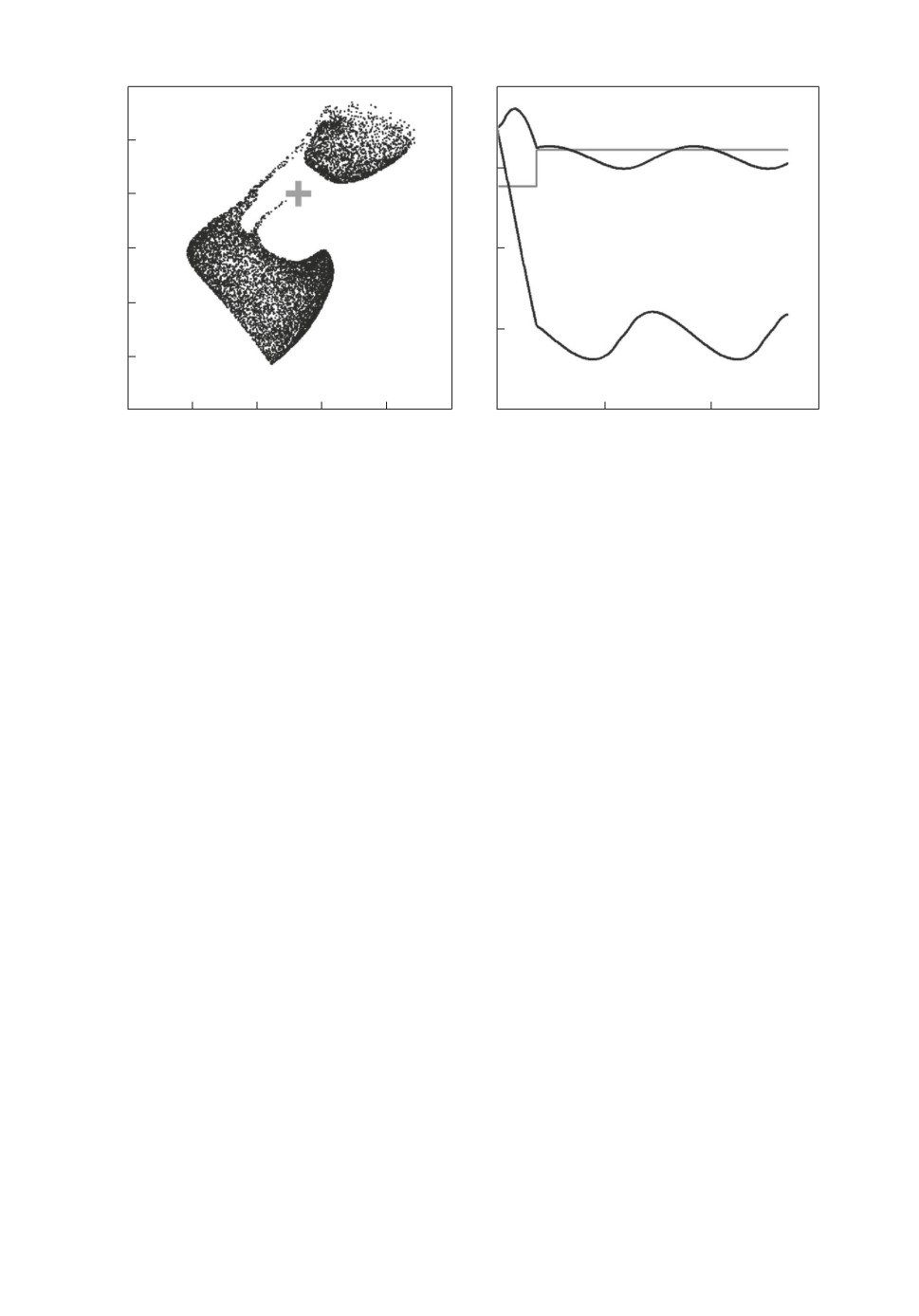
Данная тестовая задача позволяет смоделировть вычислительные труд-
ности, характерные для рассматриваемых задач оптимального управления
с нелинейными системами дифференциальных уравнений и невыпуклыми
функционалами. На рис. 3 представлено множество достижимости в при-
веденной тестовой задаче с выделенной экстремальной точкой, в которой до-
стигается наименьшее значение целевого функционала на соответствующих
оптимальных траекториях и управлении (рис. 3).
130
X2
U ', X '
20
2
10
u
0
x2
0
-10
-2
-20
x1
-4
-30
-40
-30
-20
-10
0
10
20
-60
10
20
30
X1
t
Рис. 3. Множество достижимости и экстремальная точка (слева), оптималь-
ные траектории и управление (справа) в представленной модельной задаче.
6. Заключение
Проведенные эксперименты подтвердили теоретический вывод о непри-
емлемости использования разностных схем для решения задач размерности
более 103. Время, необходимое для получения информации о матрице Гес-
се (точнее, только о ее диагонали), становится совершенно неприемлемым.
Это продемонстрировано в табл. 2 и 3 соотношением производительности
вариантов алгоритма, второй из которых основан на разностной схеме для
аппроксимации диагонали гессиана.
К достоинствам предложенного алгоритма следует отнести его способ-
ность решать задачи существенно больших размерностей, чем любые методы,
требующие полной квадратичной памяти, в том числе, методы ньютоновско-
го типа, квазиньютоновские методы, метод Пауэлла и другие. Наблюдение
графиков сходимости (значений функций с ростом числа итераций) показы-
вает, что, к сожалению, эффект ускорения за счет информации второго по-
рядка в данной конструкции алгоритмов оказывается существенным только
на начальных стадиях расчетов, позволяя очень быстро получить неплохие
результаты. Далее проявляется ¾эффект малых вариаций¿, что объясняется,
очевидно, переходом алгоритма в режим ¾почти градиентного¿ метода.
Данный алгоритм может использоваться для решения стандартной зада-
чи оптимального управления, которая на практике характеризуется наличи-
ем нелинейных систем дифференциальных уравнений и невыпуклых функ-
ционалов, что, как правило, приводит к неединственности решения и необхо-
димости разрабатывать специализированные вычислительные технологии их
исследования. С другой стороны, рост вычислительных мощностей современ-
ных компьютеров позволяет повышать эффективность алгоритмов поиска ре-
шения в задачах оптимизации, в том числе за счет использования технологий
131
Таблица 2. Результаты вычислительных экспериментов для семейства квазисепа-
рабельных функций
n
5
50
5 · 102
5 · 103
5 · 104
5 · 105
V ar1 frec 4,29 · 10-21 2,99 · 10-19
1,55 · 10-7
1,05 · 10-11 1,29 · 10-11 1,36 · 10-11
V ar1 iter
10
10
10
121
1413
17231
V ar1 ng
1,3 · 10-10
1,1 · 10-9
8,6 · 10-9
9,0 · 10-6
9,9 · 10-6
1,0 · 10-5
V ar2 frec 1,07 · 10-12 9,09 · 10-12 1,11 · 10-11 7,69 · 10-12
V ar2 iter
11
13
24
149
V ar2 ng
2,1 · 10-6
6,0 · 10-6
6,7 · 10-6
9,0 · 10-6
Таблица 3. Результаты вычислительных экспериментов для семейства функций
Розенброка-Скокова
n
5
50
5 · 102
5 · 103
5 · 104
5 · 105
V ar1 frec
1,03 · 10-9
2,6 · 10-13
2,51 · 10-13
2,5 · 10-13
1,17 · 10-12
V ar1 iter
> 6,3 · 106
13587
43997
139219
> 0,2 · 106
V ar1 ng
1,0 · 10-5
1,0 · 10-5
1,0 · 10-5
1,0 · 10-5
2,2 · 10-5
V ar2 frec
1,06 · 10-9
2,6 · 10-13
2,51 · 10-13
V ar2 iter
> 6,6 · 106
13596
43999
V ar2 ng
1,0 · 10-5
1,0 · 10-5
1,0 · 10-5
параллельного запуска однородных процессов. Проведенные вычислительные
эксперименты продемонстрировали возможность использования предложен-
ного алгоритма для решения вспомогательных задач больших размерностей,
возникающих при редукции исходной задачи на мелкой сетке к последова-
тельности конечномерных в рамках стандартной идеологии использования
прямых методов для решения задач оптимального управления.
СПИСОК ЛИТЕРАТУРЫ
1. Andrianov A.N., Anikin A.S., Bychkov I.V., Gornov A.Y. Numerical solution of
huge-scale quasiseparable optimization problems // Lobachevskii Journal of Mathe-
matics. 2017. Vol. 38. No. 5. P. 870-873.
2. Brent R. Algorithms for Minimization without Derivatives. Prentice Hall (reprinted
by Dover, 2013).
3. Bushaw D.W. Differential equations with a discontinuous forcing term. Stevens Inst.
Technol. Experimental Towing Tank Rept. 469, Hoboken, N.J., 1953.
4. Gornov A.Yu., Andrianov A.N., Anikin A.S. Algorithms for the solution of huge qua-
siseparable optimization problems // Proc. of VI International Workshop: “Critical
Infrastructures in the Digital World”. Irkutsk. 2016. P. 76-77.
5. Skokov V.A. Methods and algorithms for unconditional minimization of functions of
many variables (review) // Scientific report. 1974.
6. Ya-Xiang Yuan. Recent advances in trust region algorithms // Math. Program.,
Ser. B. 2015. Vol. 151. P. 249-281.
7. Беллман Р. Динамическое программирование. М.: Изд-во иностр. лит., 1960.
132
8. Васильев О.В. Лекции по методам оптимизации. Иркутск: Изд-во Иркут. ун-та,
1994.
9. Васильев О.В., Аргучинцев А.В. Методы оптимизации в задачах и упражне-
ниях. М.: Физматлит, 1999.
10. Горнов А.Ю. Вычислительные технологии решения задач оптимального управ-
ления. Новосибирск: Наука, 2009.
11. Деннис Дж. мл., Шнабель Р.Б. Численные методы безусловной оптимизации и
решения нелинейных уравнений. М.: Мир, 1988.
12. Дыхта В.А. Оптимизация динамических систем с разрывными траекториями и
импульсными управлениями // Соросовский образоват. журн. 1999. № 8. С. 110-
115.
13. Иванов В.В. Методы вычислений на ЭВМ. Киев: Наукова Думка, 1986.
14. Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Матема-
тическая теория оптимальных процессов. М.: Наука, 1961.
15. Фельдбаум А.А. Оптимальные процессы в системах автоматического регулиро-
вания // АиТ. 1953. Т. 14. № 6. С. 712-728.
16. Черноусько Ф.Л., Колмановский В.Б. Вычислительные и приближенные методы
оптимального управления // Итоги науки и техники. Сер. Мат. анализ. Т. 20.
1977. С. 101-166.
Статья представлена к публикации членом редколлегии А.А. Лазаревым.
Поступила в редакцию 01.02.2022
После доработки 19.04.2022
Принята к публикации 29.06.2022
133