Автоматика и телемеханика, № 11, 2022
Линейные системы
© 2022 г. Б.Т. ПОЛЯК, д-р техн. наук (boris@ipu.ru),
М.В. ХЛЕБНИКОВ, д-р физ.-мат. наук (khlebnik@ipu.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва;
Национальный исследовательский университет
“Московский физико-технический институт”, Москва)
НОВЫЕ КРИТЕРИИ
НАСТРОЙКИ ПИД-РЕГУЛЯТОРОВ1
Предлагается новый подход к задаче настройки и оптимизации пара-
метров ПИД-регулятора, основанный на сведении проблемы к задаче оп-
тимизации. При этом качество регулятора оценивается по квадратично-
му критерию от выхода системы: ПИД-регулятор настраивается против
неопределенности в начальных условиях так, чтобы выход системы был
равномерно малым; при этом дополнительно гарантируется заданная сте-
пень устойчивости замкнутой системы. Выписан градиентный метод для
отыскания параметров ПИД-регулятора.
Как показывают многочисленные примеры, предлагаемая рекуррент-
ная процедура является весьма эффективной и приводящей к вполне
удовлетворительным по инженерным критериям качества ПИД-регуля-
торам. Статья продолжает серию работ авторов, посвященную синтезу
обратной связи в задачах управления с позиций оптимизации.
Ключевые слова: линейная система, ПИД-регулятор, оптимизация, урав-
нение Ляпунова, градиентный метод, сходимость.
DOI: 10.31857/S0005231022110022, EDN: KDYNHU
1. Введение
Теория ПИД-регуляторов имеет 80-летнюю историю, восходя к работе [1]
Циглера и Николса 1942 г. С тех пор появилось множество работ, посвящен-
ных теории и практике их настройки, были предложены различные принципы
их настройки (см., например, [2]). Здесь можно упомянуть монографии [3-6]
и многие другие. Однако до настоящего времени есть не так много работ,
где формулируются явные критерии оптимальности ПИД-регуляторов, на-
пример такие, как H∞-оптимальность [7, 8].
В целом регуляторы низкого порядка настраивают по самым разным кри-
териям, используя при этом, как правило, подбор, прямой поиск, перебор
по сетке и т.п., см., например, [9, 10]. В настоящей работе предлагается но-
вый подход к настройке ПИД-регуляторов, а именно предлагается как новая
1 Исследование выполнено при частичной поддержке Российского научного фонда (про-
ект № 21-71-30005).
62
постановка задачи, решение которой определяет ПИД-регулятор, так и ал-
горитм ее решения, явным образом выписывая градиент для квадратичного
функционала и применяя градиентный метод.
В отличие от упомянутых выше критериев, будем рассматривать в неко-
тором смысле близкую к LQR постановку. А именно, неопределенность со-
держится не во входах системы, а в начальных условиях, при этом крите-
рий качества близок по своей структуре к LQR-задаче: качество оценивается
по квадратичному критерию от выхода системы. Таким образом, искомый
ПИД-регулятор настраивается против неопределенности в начальных усло-
виях так, чтобы выход системы был равномерно малым (в квадратичном
смысле).
В связи с этим напомним о новых подходах для классической проблемы
линейно-квадратичного регулирования. Ее можно рассматривать как задачу
оптимизации, где переменной является матрица обратной связи, а миними-
зируется интегральный квадратичный показатель качества переходного про-
цесса. Градиент такой функции (для управления по состоянию) выписан еще
в основополагающей работе Калмана [11], а для обратной связи по выходу
в статье Левина и Атанса [12]. С тех пор неоднократно применялись итера-
тивные методы оптимизации градиентного типа (см., например, обзор [13]),
однако обоснование подобных методов появилось лишь недавно в [14-18].
Помимо малости выхода, естественно стремиться к тому, чтобы синтези-
рованный ПИД-регулятор удовлетворял и инженерным критериям качества.
Так, если замкнутая система окажется близкой к границе устойчивости, это
приведет к ее неудовлетворительной реакции на внешнее возмущение. Поэто-
му вполне естественно требовать, чтобы ПИД-регулятор дополнительно га-
рантировал замкнутой системе некоторую (заданную) степень устойчивости.
Настоящая статья продолжает серию работ [18-20], посвященную синтезу
обратной связи в задачах управления с позиций оптимизации. Предложен-
ный в ней подход позволяет, с одной стороны, конструктивно решать задачи
настройки и оптимизации параметров регулятора, а с другой, он предостав-
ляет “хорошие” по обычным инженерным показателям регуляторы. Как по-
казывают многочисленные примеры, предлагаемая рекуррентная процедура
является весьма эффективной и приводящей к вполне удовлетворительным
ПИД-регуляторам. Вычислительным аспектам предлагаемого подхода посвя-
щена публикация [22].
Статья организована следующим образом. Раздел 2 содержит постановку
задачи; в разделе 3 обсуждается подход к ее решению; в разделе 4 представ-
лен алгоритм решения оптимизационной задачи, а раздел 5 посвящен разно-
образным примерам. Раздел 6 содержит обсуждение и возможные обобщения
полученных результатов.
Всюду далее | · | евклидова норма вектора,T символ транспонирова-
ния, tr
след матрицы, I единичная матрица соответствующей размер-
ности, а λi(A) собственные значения матрицы A.
63
2. Постановка задачи
Рассмотрим SISO-систему управления
x = Ax + bu, x(0) = x0,
(1)
y = cTx,
с состоянием x(t) ∈ Rn, выходом y(t) ∈ R и управлением u(t) ∈ R в виде
ПИД-регулятора
∫t
(2)
u(t) = -kP y(t) - kI y(τ)dτ - kD
y(t)
0
с некоторыми числовыми параметрами kP , kI и kD.
(
)
Целью является определение параметров K =
kP kI kD
стабилизирую-
щей обратной связи (2), которая
а) доставляет замкнутой системе степень устойчивости σ > 0 и
б) минимизирует квадратичный функционал
∫∞
(3)
J (K) = Ex(0) y2(t)dt + ρ|K|2
,
ρ > 0.
0
Вторая компонента в (3) представляет собой штраф за величину управления
(при этом коэффициент ρ > 0 регулирует его важность). Ее наличие позволя-
ет избежать появления больших значений коэффициентов ПИД-регулятора.
Далее будем предполагать, что начальные условия x(0) распределены с
нулевым средним и ковариационной матрицей Σ.
3. Сведение к параметрической LQR-задаче
Введем в рассмотрение вспомогательную скалярную переменную z сле-
дующим образом:
Ż = y, z(0) = 0.
Тогда, вводя расширенный вектор состояния
(
)
x
g=
∈Rn+1
z
системе (1) можно придать эквивалентный вид
)
(A 0
(b)
(x0)
ġ=
g+
u, g(0) =
,
cT
0
0
0
(4)
(
)
y=
cT
0
g.
64
При этом согласно (1), (2) имеем:
∫t
u = -kPy(t) - kI y(τ)dτ - kD y(t) =
0
= -kP cTx - kIz - kDcT ˙x = -kP cTx - kIz - kDcT(Ax + bu) =
(
)
(
)
(
)
= -kP
cT
0
g-kI
0
1
g-kD
cTA 0
g - kDcTbu,
откуда
(
)
(
)
(
)
(1 + kDcTb)u = -kP
cT
0
g-kI
0
1
g-kD
cTA 0
g
или
kP
(
)
kI
(
)
kD
(
)
(5)
u=-
cT
0
g-
0
1
g-
cTA
0
g.
1+kDcTb
1+kDcTb
1+kDcTb
Если ввести новые переменные
kP
kI
kD
k1 =
,
k2 =
,
k3 =
,
1+kDcTb
1+kDcTb
1+kDcTb
то (5) примет вид
(
)
(6)
u=-
k1cT + k3cTA k2
g.
Замыкая систему (4) обратной связью (6), приходим к замкнутой системе
)
(A - k1bcT - k3bcTA -k2b
(x0)
(7)
ġ=
g, g(0) =
,
cT
0
0
которой можно придать вид
)
(x0
(8)
ġ = (A0 + k1A1 + k2A2 + k3A3)g, g(0) =
,
0
где
)
)
(A 0
(-bcT
0
(0 -b)
(-bcTA 0)
A0 =
,
A1 =
,
A2 =
,
A3 =
cT
0
0
0
0
0
0
0
При этом исходные параметры ПИД-регулятора восстанавливаются един-
ственным образом:
k1
k2
k3
kP =
,
kI =
,
kD =
1-k3cTb
1-k3cTb
1-k3cTb
65
Замечание 1. Обратим внимание, что если векторы b и c ортогональны,
то
k1 = kP , k2 = kI, k3 = kD.
Как показывают многочисленные примеры, это вполне типичная ситуация,
так что для упрощения записи все дальнейшие выкладки относятся
именно к этому случаю.
Для удобства введем обозначение:
{A, K} = k1A1 + k2A2 + k3A3.
Для того, чтобы гарантировать желаемую степень устойчивости σ > 0 за-
мкнутой системы, введем в ее матрицу компоненту σI:
(9)
ġ = (A0
+ {A, K} + σI)g.
В самом деле, для стабилизирующего систему (9) регулятора K матрица A0 +
+ {A, K} + σI является гурвицевой. Отсюда непосредственно вытекает, что
maxRe λi(A0 + {A,K} + σI) = maxReλi(A0 + {A,K}) + σ < 0,
i
i
т.е. степень устойчивости исходной системы не меньше σ:
maxRe λi(A0 + {A,K}) < -σ.
i
Продолжим и перейдем к преобразованию функционала (3). Поскольку
(
)
x=
I
0
g,
)
(x0
то начальные условия g(0) =
будут распределены с нулевым средним
0
и ковариационной матрицей
(Σ 0)
0
0
По лемме Беллмана для системы (7) имеем:
∫∞
J (K) = Ex(0) y2(t)dt + ρ|K|2 =
0
∫∞
)
(ccT
0
= Eg(0) gT(t)
g(t)dt + ρ|K|2 =
0
0
0
(Σ 0)
= Eg(0)gT(0)Qg(0) + ρ|K|2 = tr Q
+ ρ|K|2.
0
0
66
Здесь Q ∈ R(n+1)×(n+1) решение уравнения Ляпунова
)
(ccT
0
(10)
ATKQ + QAK = -
,
0
0
где
AK = A0 + {A,K} + σI.
Сделаем следующее
(
)
Предположение. Пусть известен регулятор K0 =
k01 k02 k03
, ста-
билизирующий систему с заданным запасом устойчивости σ, т.е. такой,
что матрица AK0 = A0 + {A, K0} + σI гурвицева.
Перейдем к описанию свойств функции J(K).
Лемма 1. Функция J(K) определена и положительна на множестве S
стабилизирующих регуляторов.
Действительно, если матрица AK гурвицева, то решение Q ≽ 0 уравнения
Ляпунова (10) существует; тем самым, определена функция J(K) > 0. Мно-
жество ее определения S может быть невыпуклым и несвязным, причем его
границы могут быть негладкими.
Перейдем к вычислению градиента функции J(K).
Лемма 2. Функция J(K) определена на множестве стабилизирующих
обратных связей K. На этом допустимом множестве она дифференцируе-
ма, причем градиент дается выражениями
∂J(K)
(11)
= ∇iJ(K) = 2tr Y QAi + 2ρki
,
i = 1,2,3,
∂ki
где матрица Y является решением уравнения Ляпунова
(
)
Σ 0
(12)
AKY + Y ATK +
= 0.
0
0
Доказательство этого утверждения приведено в Приложении.
4. Алгоритм решения
Авторы предлагают следующий итеративный подход к решению этой за-
дачи; в его основе лежит применение градиентного метода по переменной K.
Приведем принципиальную схему алгоритма.
Алгоритм 1 для минимизации J(K):
1. Задаемся параметрами ε > 0, γ > 0, 0 < τ < 1 и начальным стабилизирую-
щим приближением K0.
67
2. На j-й итерации задано Kj . Вычисляем AKJ = A0 + {A, Kj }, решаем урав-
нения (10), (12) и находим матрицы Q и Y ; вычисляем градиент
Hj = ∇J(Kj)
из уравнения (11). Если ∥Hj ∥ ≤ ε, то Kj принимаем за приближенное ре-
шение.
3. Делаем шаг градиентного метода
Kj+1 = Kj - γjHj.
Длину шага γj > 0 подбираем дроблением γ до выполнения условий:
а. Kj+1
стабилизирующий регулятор;
б. J(Kj+1) ≤ J(Kj ) - τγj∥Hj ∥2.
4. Переходим к п. 2.
Сделаем несколько замечаний. Прежде всего, нетривиальным моментом
является выбор начального стабилизирующего регулятора K0. Здесь мож-
но прибегнуть к помощи D-разбиения [21] или воспользоваться методами
прямого поиска (см., например, [9]). В некоторых случаях может оказать-
ся полезным следующий прием: для некоторой положительно-определенной
матрицы Q попытаться разрешить неравенство Ляпунова ATK0 Q + QAK0 ≺ 0
относительно K0. Также часто в практических задачах требуется улучшить
качество уже имеющегося ПИД-регулятора путем настройки его параметров.
Наконец, если исходная система управления является устойчивой (как часто
и бывает на практике), вопрос выбора начального регулятора решается оче-
видным образом.
Еще одним важным моментом является выбор пробного шага градиентно-
го метода. Весьма перспективным является его выбор из следующих сообра-
жений. Найдем для некоторого стабилизирующего регулятора Kj решение Q
уравнения Ляпунова
(A0 + σI + {A, Kj })TQ + Q(A0 + σI + {A, Kj }) = -I.
Рассмотрим приращение по K:
Kj → Kj - γHj, Hj = ∇J(Kj),
и найдем, для каких γ матрица Q останется матрицей квадратичной функции
Ляпунова для AKj -γHj = A0 + σI + {A, Kj - γHj }, т.е.
(A0 + σI + {A, Kj - γHj})TQ + Q(A0 + σI + {A, Kj - γHj }) ≺ 0.
С учетом исходного уравнения имеем
γ(-{A, Hj }TQ - Q{A, Hj }) ≺ I,
откуда
γ < λ-1max(-{A,Hj}TQ - Q{A,Hj}).
68
5. Примеры
Рассматриваемые далее примеры взяты из статьи [23]. Всюду в этом раз-
деле будем полагать Σ = I.
Пример 1. Рассмотрим передаточную функцию
1
G(s) =
,
α = 0,5.
(1 + s)(1 + αs)(1 + α2s)(1 + α3s)
Matlab-процедура tf2ss доставляет матрицы системы в пространстве со-
стояний:
-15 -70 -120 -64
1
0
1
0
0
0
0
0
A=
b=
c=
0
,
0,
0
.
1
0
0
0
0
1
0
0
64
Пусть
σ = 0,25, ρ = 10.
При выборе в качестве начального стабилизирующего регулятора
(
)
K0 =
9,5717
4,8538
8,0028
,
оптимизационная процедура приводит к регулятору
(
)
K∗ =
7,6296
3,4331
3,1795
,
|K∗| = 8,9502,
доставляющему интегральной части функционала J(K) значение 3,5327·103.
Возьмем теперь начальное приближение
(
)
K′0 =
4,3141
9,1065
1,8185
;
в результате получим регулятор
(
)
K′∗ =
7,6265
3,4327
3,1782
,
|K∗| = 8,9469,
и значение функционала, равное J(K′∗) = 3,5333 · 103.
Как видно, значения функционала и нормы получившихся регуляторов
отличаются на доли процента.
Передаточная функция ПИД-регулятора с коэффициентами K∗ имеет вид
3,4331
GPID(s) = 7,6296 +
+ 3,1795s.
s
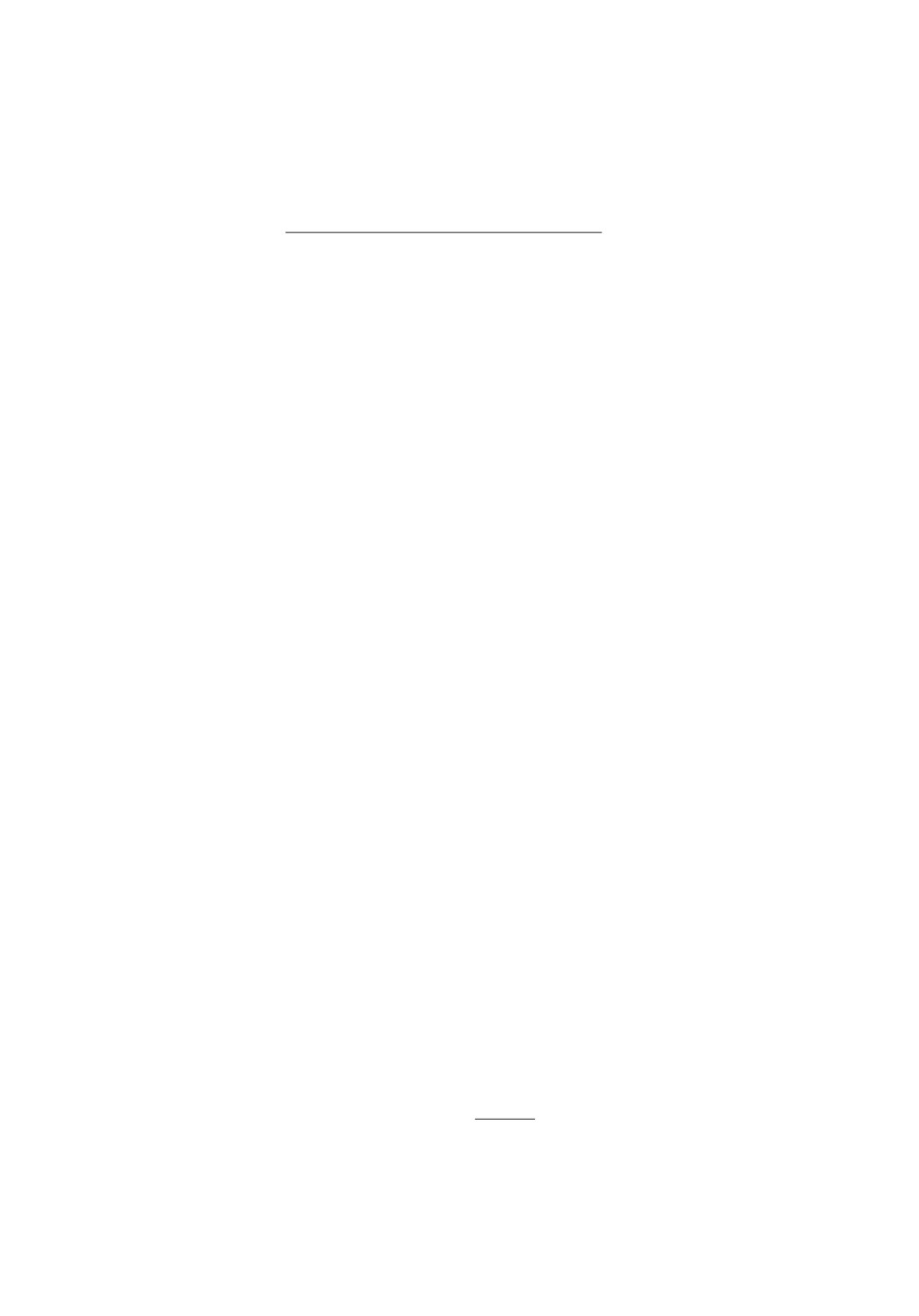
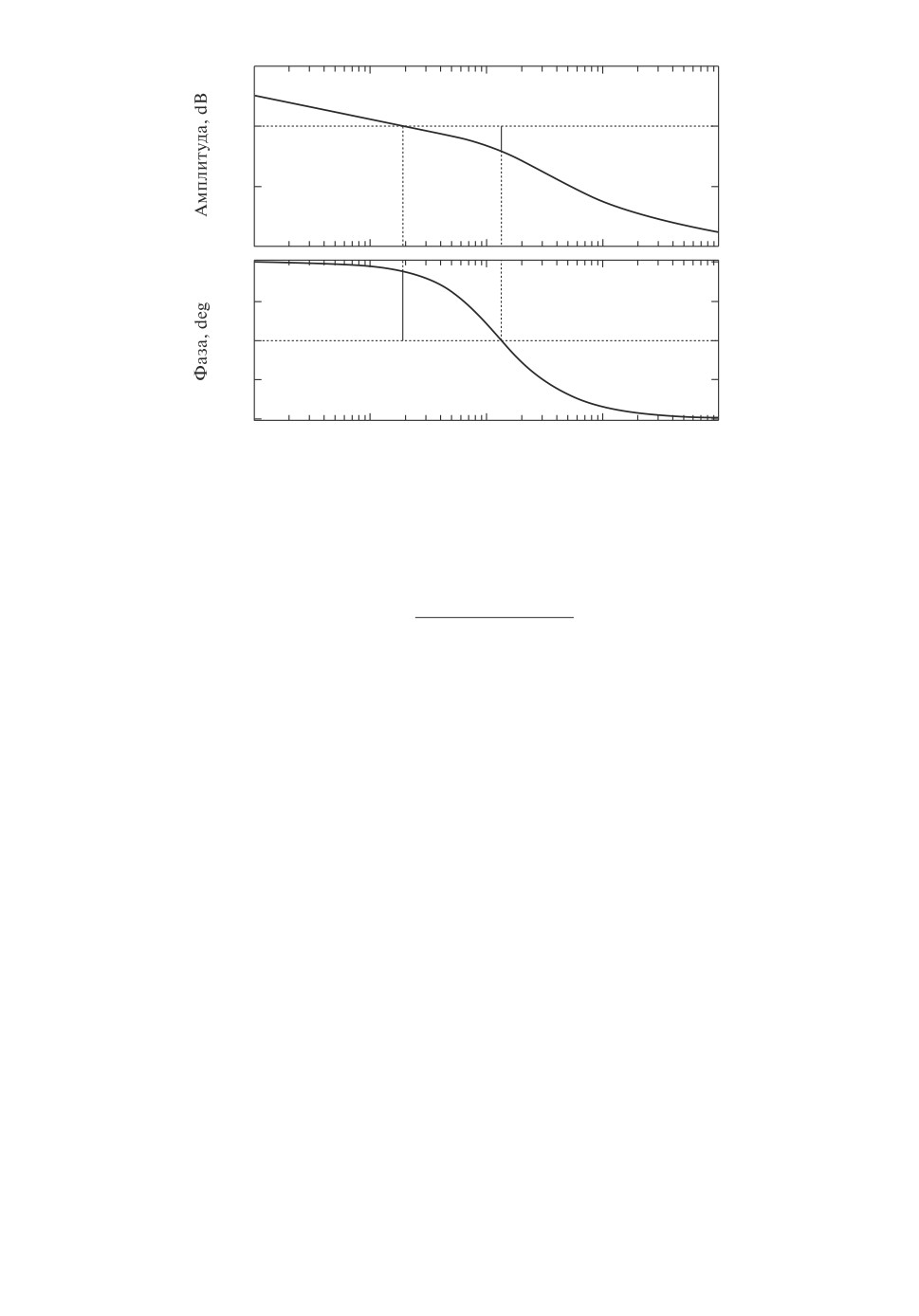
Система, замкнутая ПИД-регулятором K∗, является устойчивой по крите-
рию Найквиста; ее минимальный запас устойчивости по модулю составляет
7,41 дБ, а по фазе
27,5◦, см. рис. 1.
69
50
0
-50
-100
-150
-45
-90
-135
-180
-225
-270
10-1
100
101
102
103
Частота, rad/s
Рис. 1. ЛАФЧХ замкнутой системы из примера 1.
Сравним полученный ПИД-регулятор с регуляторами, полученными по
методу Циглера-Николса (ZN) [1], гармонического поиска (Harmony Search,
HS) [24], улучшенной версии алгоритма пчел (Improved Bees’ Algorithm,
IBA) [25] и алгоритма пчелиной колонии (Artificial Bee Сolony, ABC) [26],
подробнее см. [27]. Соответствующие результаты представлены в табл. 1.
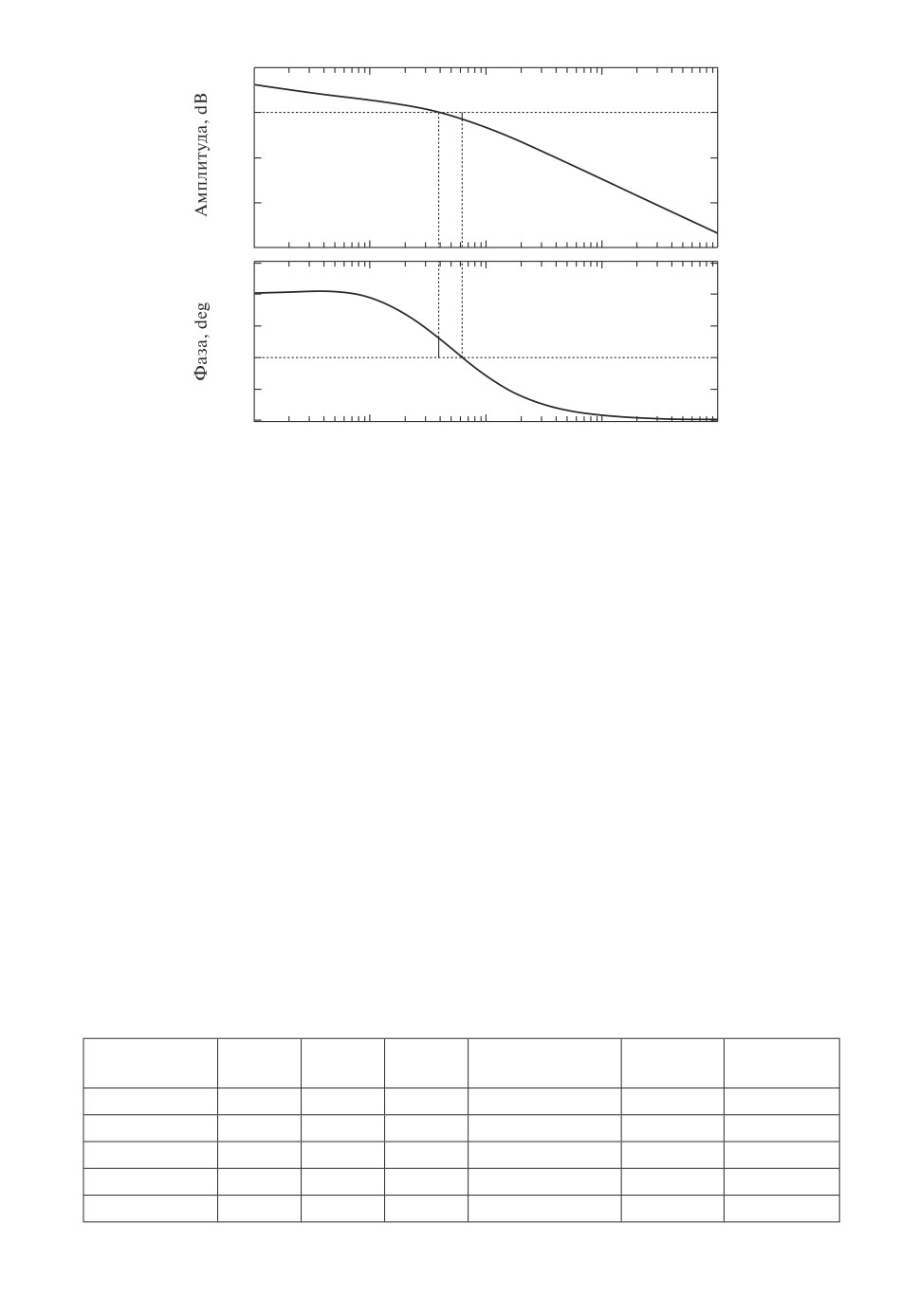
На рис. 2 показана динамика выхода y(t) рассматриваемой системы при
некотором начальном условии
-0,5715
-0,1249
x0 =
0,6635
0,4664
из единичного шара: при замыкании найденным ПИД-регулятором K∗ (жир-
ная линия) и регуляторами из табл. 1.
Таблица 1. Сравнение ПИД-регуляторов по интегральной части функционала
и запасам устойчивости для примера 1
∫
kP
kI
kD
Ex(0) y2(t)dt Gm (дБ) Pm (град)
0
Алгоритм 1
7,6296
3,4331
3,1795
2,7303 · 103
7,41
27,5
ZN
3,9706
3,5749
1,1026
4,3752 · 103
12,4
35,0
HS
2,8206
1,8022
1,4330
3,6654 · 103
15,6
68,0
IBA
2,7852
1,7873
1,4157
3,6872 · 103
15,7
68,5
ABC
2,8458
1,8278
1,4535
3,6545 · 103
15,5
67,8
70
50
K*
40
K1
K2
K3
30
K4
20
10
0
-10
-20
-30
-40
0
5
10
15
t
Рис. 2. Траектории выхода системы из примера 1.
0,25
K*
K
1
K2
0,20
K
3
K
4
0,15
0,10
0,05
0
-0,05
0
5
10
15
t
Рис. 3. Траектории выхода системы из примера 1 при единичном ступенчатом
возмущении.
На рис. 3 показана динамика выхода y(t) рассматриваемой системы, за-
мкнутой найденным ПИД-регулятором K∗ (жирная линия) и регуляторами
из табл. 1 при единичном ступенчатом возмущении (и нулевом начальном
условии).
Как видно, синтезированный ПИД-регулятор вполне удовлетворителен по
своим характеристикам.
71
1400
1200
1000
800
600
400
200
0
20
40
60
80
100
120
140
Niter
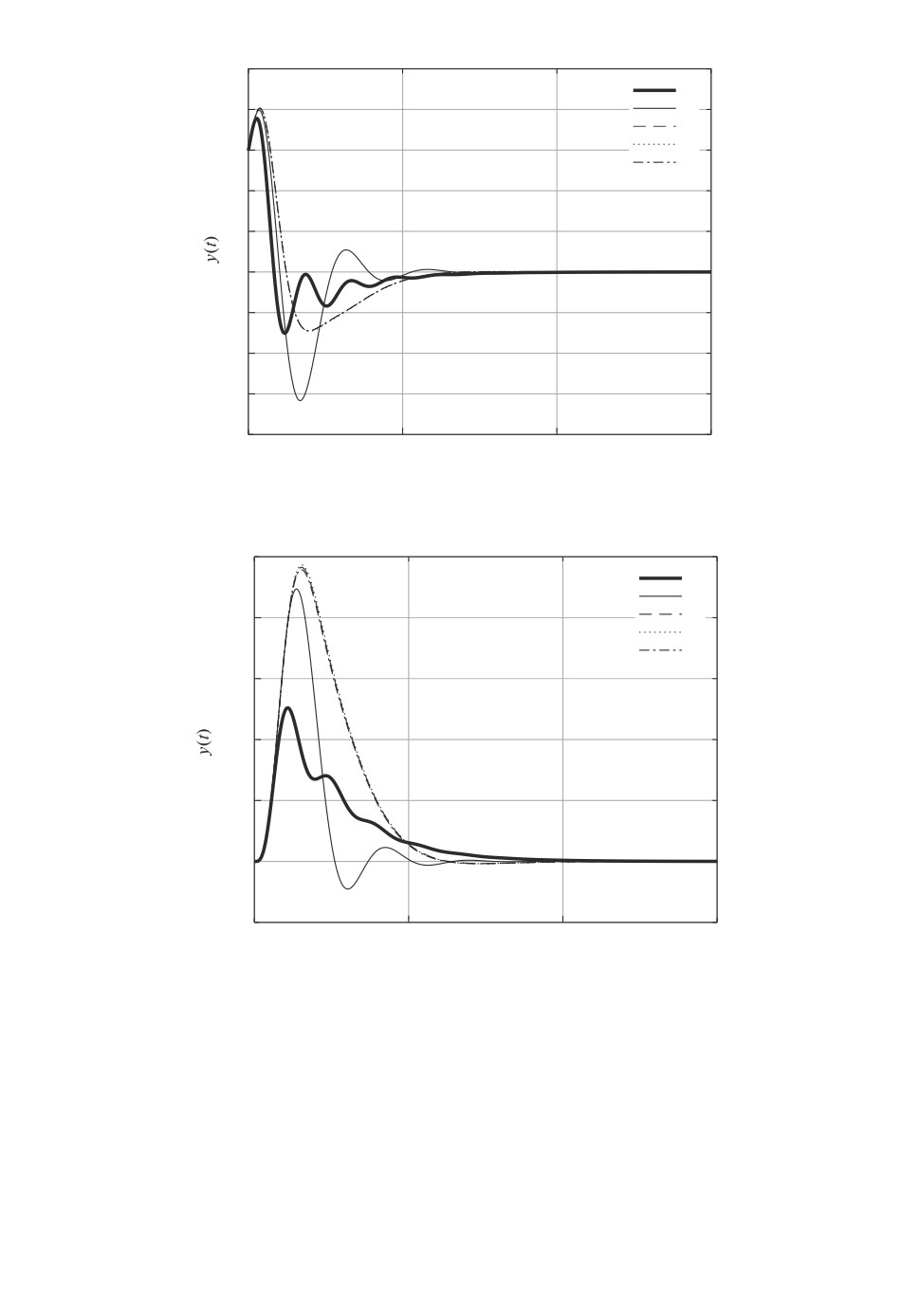
Рис. 4. Оптимизационная процедура в примере 2.
Пример 2. Рассмотрим передаточную функцию
1 - αs
G(s) =
,
α = 0,1.
(s + 1)2
Matlab-процедура tf2ss доставляет матрицы системы в пространстве со-
стояний:
-3 -3 -1
1
0
,b= 0,c= -0,1.
A= 1
0
0
0
1
0
0
1
Полагая ρ = 10, σ = 0,1 и выбрав
(
)
K0 =
3,8710
6,1308
8,9234
в качестве начального стабилизирующего регулятора, при завершении опти-
мизационной процедуры получаем регулятор
(
)
K∗ =
0,4010
0,1870
0,0382
,
доставляющий интегральной части функционала J(K) значение 8,5440, см.
рис. 4.
Передаточная функция ПИД-регулятора с коэффициентами K∗ имеет вид
0,1870
GPID(s) = 0,4010 +
+ 0,0382s.
s
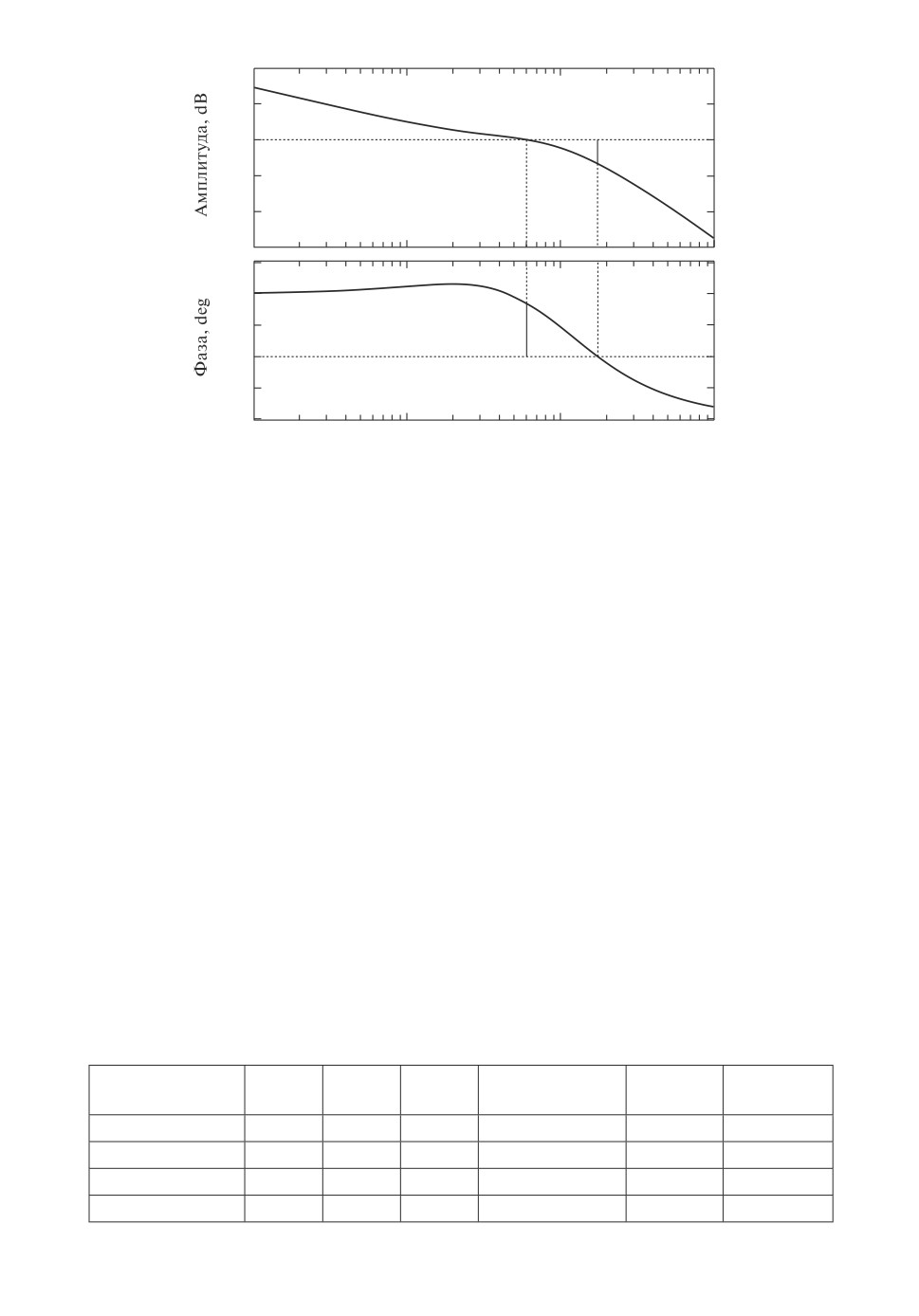
Замкнутая система с ПИД-регулятором K∗ является устойчивой по крите-
рию Найквиста; ее минимальный запас устойчивости по модулю составляет
21,1 дБ, а по фазе 78,9◦, см. рис. 5.
72
50
0
-50
-100
270
225
180
135
90
10-2
10-1
100
101
102
Частота, rad/s
Рис. 5. ЛАФЧХ замкнутой системы из примера 2.
Пример 3. Рассмотрим передаточную функцию
2
(s + 6)
G(s) =
s(s + 1)2(s + 36)
Matlab-процедура tf2ss доставляет матрицы системы в пространстве со-
стояний:
-39 -111 -109 -36
1
0
1
0
0
0
0
1
A=
b=
c=
0
1
0
0
,
0,
12.
0
0
1
0
0
36
При
ρ = 10, σ = 0,1,
и выборе в качестве начального стабилизирующего регулятора
(
)
K0 =
10,1955
9,8265
2,4392
,
оптимизационная процедура приводит к регулятору
(
)
K∗ =
6,7538
1,2114
2,2965
,
доставляющему интегральной части минимизируемого функционала значе-
ние 1,4774 · 103.
Замкнутая система с ПИД-регулятором K∗ является устойчивой по крите-
рию Найквиста; ее минимальный запас устойчивости по модулю бесконечен,
а по фазе равен 55,2◦, см. рис. 6.
73
50
0
-50
-60
-90
-120
-150
10-2
10-1
100
101
102
103
Частота, rad/s
Рис. 6. ЛАФЧХ замкнутой системы из примера 3.
26
24
22
20
18
16
14
12
0
5
10
15
20
25
30
35
40
45
Niter
Рис. 7. Оптимизационная процедура в примере 4.
Пример 4. Вернемся к примеру 1 и положим в нем α = 1. Оптимизацион-
ная процедура (при ρ = 0,5, σ = 0,07) завершается нахождением регулятора
0,2849
GPID(s) = 1,7408 +
+ 1,8615s,
s
см. рис. 7.
74
40
20
0
-20
-40
-60
-45
-90
-135
-180
-225
-270
10-2
10-1
100
101
Частота, rad/s
Рис. 8. ЛАФЧХ замкнутой системы из примера 4.
Он доставляет интегральной части минимизируемого функционала значе-
ние 8,9878 и обладает минимальным запасом устойчивости по модулю 13,2 дБ,
а по фазе 76,2◦, см. рис. 8.
Сравнение найденного регулятора с тремя ПИД/ПИ-регуляторами, пред-
ложенными для этого же примера в работах [28-30], представлено в табл. 2.
На рис. 9 показана динамика изменения выхода y(t) рассматриваемой си-
стемы при некотором начальном условии
-0,2456
-0,6435
x0 =
-0,6921
-0,2161
из единичного шара: при замыкании найденным ПИД-регулятором K∗ (жир-
ная линия) и регуляторами из табл. 2.
На рис. 10 показана динамика выхода y(t) рассматриваемой системы, за-
мкнутой найденным ПИД-регулятором K∗ (жирная линия) и регуляторами
Таблица 2. Сравнение ПИД-регуляторов по интегральной части функционала
и запасам устойчивости для примера 4
∫
kP
kI
kD Ex(0) y2(t)dt Gm (дБ) Pm (град)
0
Алгоритм 1
1,7408
0,2849
1,8615
8,9878
13,2
76,2
Из работы [28]
0,925
0,9
2,86
9,6715
14,87
43,0
Из работы [29]
0,83
0,318
0,3569
10,7752
14,34
62,5
Из работы [30]
1,031
0,3529
0
12,5559
17,25
96,2
75
1.5
K*
K1
1,0
K2
K3
0,5
0
-0,5
-1,0
-1,5
-2,0
0
5
10
15
20
25
30
35
40
45
50
t
Рис. 9. Траектории выхода системы из примера 4.
0,6
K*
K1
0,5
K
2
K3
0,4
0,3
0,2
0,1
0
-0,1
-0,2
0
5
10
15
20
25
30
35
40
45
50
t
Рис. 10. Траектории выхода системы из примера 4 при единичном ступенча-
том возмущении.
из табл. 2 при единичном ступенчатом возмущении (и нулевом начальном
условии).
Как видно, синтезированный ПИД-регулятор обладает вполне удовлетво-
рительными характеристиками.
76
100
50
0
-50
45
0
-45
-90
-135
-180
10-3
10-2
10-1
100
101
102
103
Частота, rad/s
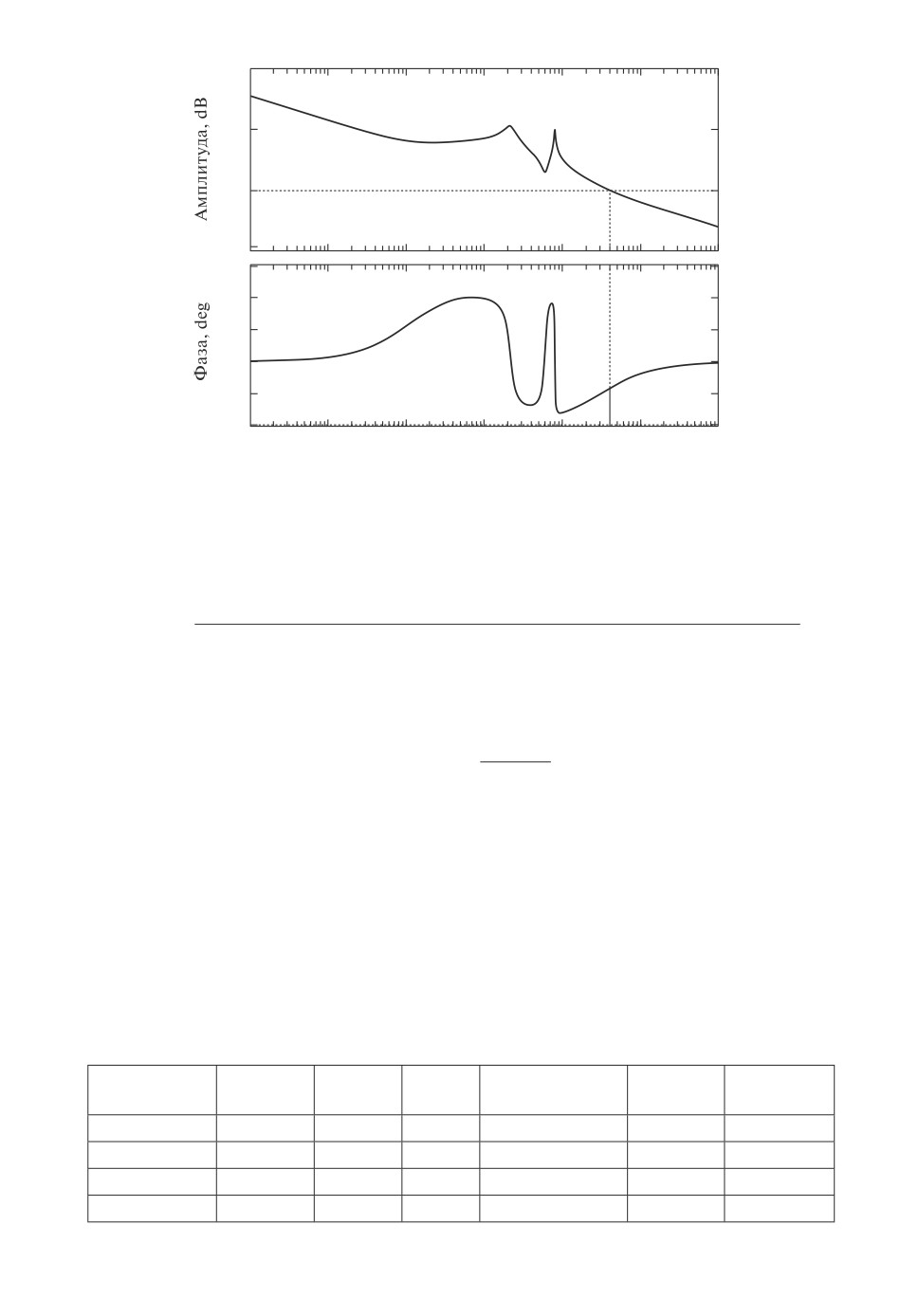
Рис. 11. ЛАФЧХ замкнутой системы из примера 5.
Пример 5. Рассмотрим передаточную функцию
10s3 + 9s2 + 362,4s + 36,16
G(s) =
2s5 + 2,7255s4 + 138,4292s3 + 156,471s2 + 637,6472s + 360,1779
из статьи [7].
Предложенный алгоритм (при ρ = 0,001, σ = 0,01) дает ПИД-регулятор
75,9364
GPID(s) = 201,1057 +
+ 6,2735s,
s
доставляющий интегральной части минимизируемого функционала значение
1,0614 · 103 и обладающий бесконечным запасом устойчивости по модулю и
запасом по фазе 52,2◦, см. рис. 11.
Его сравнение с тремя ПИД-регуляторами, предложенными для рассмат-
риваемой системы в работе [8], представлено в табл. 3.
Синтезированный ПИД-регулятор обладает весьма удовлетворительными
характеристиками. На рис. 12 показана динамика изменения выхода y(t) рас-
Таблица 3. Сравнение ПИД-регуляторов по интегральной части функционала
и запасам устойчивости для примера 5
∫
kP
kI
kD Ex(0) y2(t)dt Gm (дБ) Pm (град)
0
Алгоритм 1
201,1057
75,9364
6,2735
1,0614 · 103
∞
52,2
#1 из [8]
185
2986
9
1,7338 · 103
-10,2
60,8
#2 из [8]
20
800
9
1,3503 · 104
-7,79
87,5
#3 из [8]
19
200
9
1,3769 · 104
-10
78,6
77
40
K*
K1
30
2
K
K
3
20
10
0
-10
-20
-30
-40
0
1
2
3
4
5
6
7
8
9
10
t
Рис.
12. Траектории выхода системы из примера 5.
0,020
K*
K
1
0,015
K2
3
K
0,010
0,005
0
-0,005
-0,010
0
1
2
3
4
5
6
7
8
9
10
t
Рис. 13. Траектории выхода системы из примера 5 при единичном ступенча-
том возмущении.
сматриваемой системы при некотором начальном условии
-0,5228
-0,4387
x0 =
-0,3609
-0,1148
-0,6251
из единичного шара при замыкании найденным ПИД-регулятором K∗ (жир-
ная линия) и регуляторами из работы [8].
78
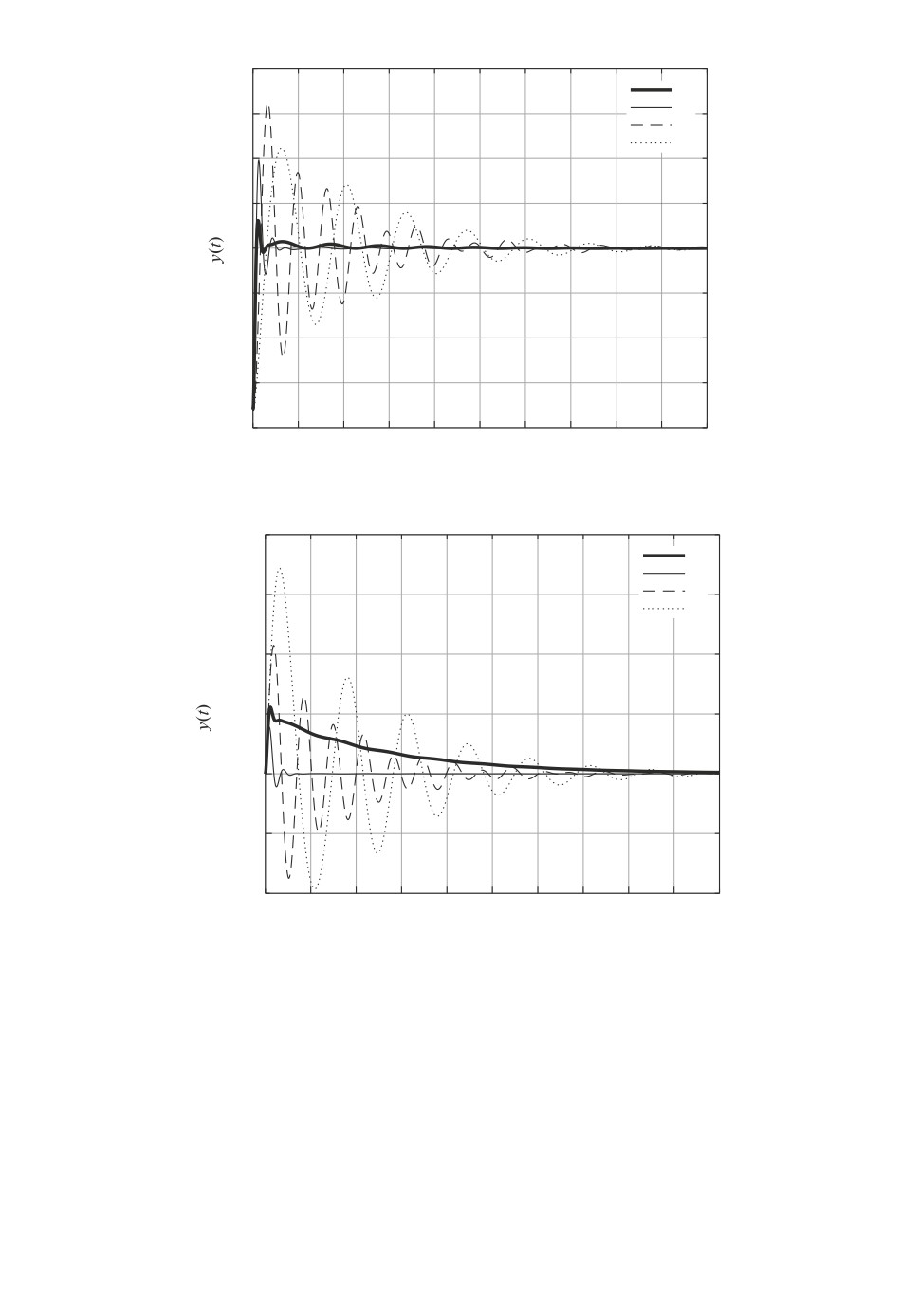
На рис. 13 показана динамика выхода y(t) рассматриваемой системы, за-
мкнутой найденным ПИД-регулятором K∗ (жирная линия) и регуляторами
из табл. 3 при единичном ступенчатом возмущении (и нулевом начальном
условии).
Таким образом, синтезированный ПИД-регулятор обладает вполне удовле-
творительными характеристиками.
6. Заключение
В статье рассмотрены только SISO-системы, однако предлагаемый под-
ход полностью может быть перенесен и на многомерный случай. При этом
выкладки становятся несколько более громоздкими, в то время как идейная
сторона меняется мало.
ПРИЛОЖЕНИЕ
Лемма П.1. Пусть X и Y решения двойственных уравнений Ляпуно-
ва с гурвицевой матрицей A:
ATX + XA + W = 0 и AY + Y AT + V = 0.
Тогда
tr XV = tr Y W.
Доказательство леммы П.1. В самом деле, прямым вычислением
имеем
(
)
tr (XV ) = tr
X(-AY - Y AT)
= -tr(XAY ) - tr(XY AT) =
= -tr(XAY )T - tr(ATXY )T = tr(Y (-ATX - XA)) = tr(Y W).
Лемма П.1 доказана.
Доказательство леммы 2. В уравнении (10) придадим величине K
приращение ΔK и обозначим соответствующее приращение Q через ΔQ:
(
)
ccT
0
ATK+ΔK(Q + ΔQ) + (Q + ΔQ)AK+ΔK = -
0
0
или
)
(ccT
0
(AK + {A, ΔK})T(Q + ΔQ) + (Q + ΔQ)(AK + {A, ΔK}) = -
,
0
0
откуда после линеаризации имеем
(Π.1)
ATKΔQ + ΔQAK + Q{A,ΔK} + {A,ΔK}T
Q = 0.
79
Вычислим приращение функционала f(K), линеаризуя соответствующие
величины:
)
(Σ 0
(Σ 0)
ΔJ(K) = tr (Q + ΔQ)
+ ρ|K + ΔK|2 - tr Q
- ρ|K|2 =
0
0
0
0
)
(Σ 0
= tr ΔQ
+ 2ρ(K, ΔK).
0
0
Рассмотрим уравнение Ляпунова (12), двойственное к (Π.1). По лемме П.1
из уравнений (Π.1) и (12) имеем
)
(Σ 0
ΔJ(K) = tr ΔQ
+ 2ρ(K, ΔK) = 2 tr Y Q{A, ΔK} + 2ρ(K, ΔK),
0
0
так что
∑
dJ(K) = 2 tr Y Q Aidki + 2ρ(K, dK),
i=1
откуда имеем (11). Лемма 2 доказана.
СПИСОК ЛИТЕРАТУРЫ
1. Ziegler J.B., Nichols N.B. Optimum Settings for Automatic Controllers // Transact.
ASME. 1942. V. 64. P. 759-768.
2. Visioli A. Practical PID Control. London: Springer-Verlag, 2006.
3.
Åström K.J., Hägglund T. PID Controllers: Theory, Design, and Tuning. Research
Triangle Park: Instrument Society of America, 1995.
4.
Åström K.J., Hägglund T. Advanced PID Control. Research Triangle Park: The
Instrumentation, Systems, and Automation Society, 2006.
5. Bhattacharyya S.P., Keel L.H. Linear Multivariable Control Systems. Cambridge
University Press, 2022.
6. Wang Q.-G., Ye Z., Cai W.-J., Hang C.-C. PID Control for Multivariable Processes.
Berlin: Springer, 2008.
7. Blanchini F., Lepschy A., Miani S., Viaro U. Characterization of PID and Lead/Lag
Compensators Satisfying Given H∞ Specifications // IEEE Transact. Autom. Con-
trol. 2004. V. 49. No. 5. P. 736-740.
8. Han S., Keel L.H., Bhattacharyya S.P. PID Controller Design with an H∞ Crite-
rion // IFAC-PapersOnLine. 2018. V. 51. No. 4. P. 400-405.
9. Киселев О.Н., Поляк Б.Т. Cинтез регуляторов низкого порядка по критерию H∞
и по критерию максимальной робастности // АиТ. 1999. № 3. С. 119-130.
Kiselev O.N., Polyak B.T. Design of Low-Order Controllers by the H∞-criterion and
Maximum-Robustness Performance Indices // Autom. Remote Control. 1999. V. 60.
No. 3. P. 393-402.
80
10.
Грязина Е.Н., Поляк Б.Т., Тремба А.А. Синтез регуляторов низкого порядка по
критерию H∞: параметрический подход // АиТ. 2007. № 3. С. 94-105.
Gryazina E.N., Polyak B.T., Tremba A.A. Design of the Low-Order Controllers by
the H∞ Criterion: A Parametric Approach // Autom. Remote Control. 2007. V. 68.
No. 3. P. 456-466.
11.
Kalman R.E. Contributions to the Theory of Optimal Control // Boletin de la So-
ciedad Matematica Mexicana. 1960. V. 5. No. 1. P. 102-119.
12.
Levine W., Athans M. On the Determination of the Optimal Constant Output Feed-
back Gains for Linear Multivariable Systems // IEEE Trans. Automat. Control.
1970. V. 15. No. 1. P. 44-48.
13.
Mäkilä P.M., Toivonen H.T. Computational Methods for Parametric LQ Problems -
A Survey // IEEE Trans. Automat. Control. 1987. V. 32. No. 8. P. 658-671.
14.
Fazel M., Ge R., Kakade S., Mesbahi M. Global Convergence of Policy Gradient
Methods for the Linear Quadratic Regulator // Proc. 35th Int. Conf. Machine Learn-
ing. Stockholm, Sweden, July 10-15, 2018. V. 80. P. 1467-1476.
15.
Mohammadi H., Zare A., Soltanolkotabi M., Jovanović M.R. Global Exponential
Convergence of Gradient Methods Over the Nonconvex Landscape of the Linear
Quadratic Regulator // Proc. 2019 IEEE 58th Conf. Decision Control. Nice, France,
December 11-13, 2019. P. 7474-7479.
16.
Zhang K., Hu B., Basar T. Policy Optimization for H2 Linear Control with H∞
Robustness Guarantee: Implicit Regularization and Global Convergence // arXiv:
1910.09496, 2020.
17.
Bu J., Mesbahi A., Fazel M., Mesbahi M. LQR through the Lens of First Order
Methods: Discrete-Time Case // arXiv:1907.08921, 2019.
18.
Fatkhullin I., Polyak B. Optimizing Static Linear Feedback: Gradient Method //
SIAM J. Control Optim. 2021. V. 59. No. 5. P. 3887-3911.
19.
Поляк Б.Т., Хлебников М.В. Синтез статического регулятора для подавления
внешних возмущений как задача оптимизации // АиТ. 2021. № 9. С. 86-115.
Polyak B.T., Khlebnikov M.V. Static Controller Synthesis for Peak-to-Peak Gain
Minimization as an Optimization Problem // Autom. Remote Control. 2021. V. 82.
No. 9. P. 1530-1553.
20.
Поляк Б.Т., Хлебников М.В. Синтез обратной связи по выходу при помощи на-
блюдателя как задача оптимизации // АиТ. 2022. № 3. С. 7-32.
Polyak B.T., Khlebnikov M.V. Observer-Aided Output Feedback Synthesis as an
Optimization Problem // Autom. Remote Control. 2022. V. 83. No. 3. P. 303-324.
21.
Грязина Е.Н., Поляк Б.Т., Тремба А.А. Современное состояние метода D-раз-
биения // АиТ. 2008. № 12. С. 3-40.
Gryazina E.N., Polyak B.T., Tremba A.A. D-Decomposition Technique State-of-the-
art // Autom. Remote Control. 2008. V. 69. No. 12. P. 1991-2026.
22.
Шатов Д.В. Синтез параметров пропорционально-интегрирующих и пропор-
ционально-интегрально-дифференцирующих регуляторов для стационарных
линейных объектов с ненулевыми начальными условиями // Известия РАН.
Теория и системы управления. 2023. № 1. (в печати)
23.
Åström K.J., Hägglund T. Benchmark Systems for PID Control // IFAC Proceedings
Volumes. 2000. V. 33. Iss. 4. P. 165-166.
81
24. Geem Z.W., Kim J.H., Loganathan G.V. A New Heuristic Optimization Algorithm:
Harmony Search // Simulation. 2002. V. 76. No. 2. P. 60-68.
25. Pham D.T., Sholedolu M. The Bees Algorithm with Attraction to Global Best So-
lutions // Proc. 5th I*PROMS International Virtual Conference on Innovative Pro-
duction Machines and Systems (IPROMS 2009). Cardiff, UK, July 6-17, 2009.
26. Karaboga D. An Idea Based on Honey Bee Swarm for Numerical Optimization. Tech-
nical Report TR06. Erciyes University, 2005.
27. Karaboga D., Akay B. Proportional-Integral-Derivative Controller Design by Using
Artificial Bee Colony, Harmony Search, and the Bees Algorithms // Proceedings
of the Institution of Mechanical Engineers. Part I: J. Syst. Control Engineer. 2010.
V. 224. No. 7. P. 869-883.
28. Panagopoulos H.,
Åström K.J., Hägglund T. Design of PID Controllers Based on
Constrained Optimization // Proc. 1999 American Control Conference. San Diego,
USA, June 2-4, 1999. V. 6. P. 3858-3862.
29. Li Y., Ang K.H., Chong G.C.Y. PID Control System Analysis and Design // IEEE
Control Syst. Magaz. 2006. V. 26. No. 1. P. 32-41.
30. Leva A., Papadopoulos A.V. Tuning of Event-Based Industrial Controllers with Sim-
ple Stability Guarantees // J. Process Control. 2013. V. 23. P. 1251-1260.
Статья представлена к публикации членом редколлегии Л.Б. Рапопортом.
Поступила в редакцию 15.05.2022
После доработки 20.07.2022
Принята к публикации 28.07.2022
82