Автоматика и телемеханика, № 11, 2022
Нелинейные системы
© 2022 г. В.А. АЛЕКСАНДРОВ, канд. техн. наук
(va.alexandrov@yandex.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва),
Е.Ю. ЗЫБИН, д-р техн. наук (zybin@mail.ru),
В.В. КОСЬЯНЧУК, д-р техн. наук (kos.vl.v@gmail.com),
Н.И. СЕЛЬВЕСЮК, д-р техн. наук (nis@gosniias.ru)
(ФАУ Государственный научно-исследовательский институт
авиационных систем, Москва),
А.А. ТРЕМБА, канд. физ.-мат. наук (atremba@ipu.ru),
М.В. ХЛЕБНИКОВ, д-р физ.-мат. наук (khlebnik@ipu.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва;
Национальный исследовательский университет
“Московский физико-технический институт”, Москва)
ОПТИМИЗАЦИЯ РАСХОДА ТОПЛИВА ВОЗДУШНОГО
СУДНА НА ЭТАПЕ НАБОРА ВЫСОТЫ1
Рассматривается задача минимизации расхода топлива дозвукового
турбореактивного пассажирского самолета на этапе набора высоты. Це-
левая функция оптимизации кроме расхода топлива включает время, за-
траченное на этап набора высоты, так как оптимизация набора высоты
это часть задачи оптимизации всего полета с требованием прибытия в
заданную точку в заданное время. Так как в конце этапа нужно выйти
на заданные значения скорости и высоты, с которых должен начинаться
крейсерский полет, то в целевую функцию добавлены штрафы за недо-
стижение этих значений. Значение целевой функции это результат чис-
ленного решения системы дифференциальных уравнений, поэтому для
оптимизации предлагается безградиентный метод поиска с использова-
нием точек-кандидатов и учетом ограничений. Рассмотрен пример опти-
мизации расхода топлива в сравнении со стандартным профилем набора
высоты для двух вариантов возможной реализации системы управления:
управление тягой и тангажом или управление только тангажом при по-
стоянном значении управления тягой.
Ключевые слова: оптимизация, дозвуковой турбореактивный самолет, на-
бор высоты, расход топлива, моделирование полета.
DOI: 10.31857/S0005231022110034, EDN: KEFPHO
1. Введение
В работе исследуется задача оптимизации этапа набора высоты в рамках
общей задачи минимизации расхода топлива дозвукового турбореактивного
1 Исследование выполнено при поддержке Российского научного фонда, проект № 21-
71-30005.
83
среднемагистрального узкофюзеляжного пассажирского самолета при усло-
вии прибытия в заданное время в точку захода на посадку. В [1] рассматри-
вался этап крейсерского полета. Этап набора высоты начинается от высоты,
на которой заканчивается этап взлета, когда шасси и закрылки убраны, и
конфигурация самолета это конфигурация полета по маршруту. Обычно
это значение принимается равным 1500 футов, но может отличаться в зави-
симости от воздушного судна и условий аэродрома. Для исследуемого этапа
должна быть задана эта начальная высота и другие начальные условия для
этой точки: скорость, угол наклона траектории, масса. В конце этапа набора
высоты необходимо выйти на значения высоты и скорости, с которых будет
начинаться этап крейсерского полета. В рассматриваемой задаче оптимиза-
ции этапа набора высоты предполагается, что эти значения заданы. Необхо-
димо учитывать ограничения допустимой скорости, в том числе обусловлен-
ные ограничением шума на малой высоте, а также ускорения и скороподъ-
емности, обусловленные не только техническими ограничениями воздушного
судна, но и требованиями комфорта пассажиров. Существенной особенно-
стью этапа набора высоты является учет доступной тяги двигателей, так как
допустимые значения ускорения и угла наклона траектории могут требовать
значения тяги, превышающие максимально доступное. Кроме того, доступ-
ная тяга уменьшается с ростом высоты полета. Это приводит к тому, что
если пытаться поддерживать высокое значение угла наклона траектории, то
скорость будет падать, а при поддержании допустимого ускорения или даже
постоянной скорости угол наклона траектории должен уменьшаться по мере
увеличения высоты.
Так как этап набора высоты непродолжителен, то очевидно, что выигрыш
расхода топлива, полученный в результате оптимизации, в абсолютных зна-
чениях будет незначителен. В [2] такой вывод сделан при сравнении резуль-
татов оптимизации набора высоты дальнемагистрального самолета для трех
различных критериев: минимизации пройденного расстояния, затраченного
времени и расхода топлива. Экономия при минимизации расхода топлива по
сравнению с расходом, полученным при оптимизации по другим критериям,
составила менее 1%. Необходимо заметить, что в этой работе горизонтальное
ускорение и угол наклона траектории принимаются постоянными в каждый
момент времени, что позволяет не моделировать систему управления, прене-
брегая переходными процессами.
В [3] движение воздушного судна моделируется через энергетическое со-
стояние с использованием аппроксимирующей табличной функции, завися-
щей от высоты, скорости, угла атаки, угла руля высоты и управления тягой.
Для определения секундного расхода топлива также используется таблица за-
висимости от высоты, скорости и управления тягой. Таким образом, переход-
ные процессы тоже не учитываются, и система управления не моделируется.
При поиске оптимального решения методом нелинейного программирования
для угла набора высоты и управления тягой получено подтверждение при-
меняемого на практике правила, что значение управления тягой выбирается
84
максимально разрешенным (положение “Climb”) на всем этапе набора высо-
ты. Для среднемагистрального самолета получена экономия топлива до 0,9%
по сравнению со стандартным профилем с постоянной приборной скоростью.
При оптимизации и сравнении результатов учитывается типовое ограничение
приборной скорости на высоте до 10 000 футов. Заметим, что в этой работе не
учитывается ограничение на горизонтальное ускорение, что приводит к рез-
кому росту скорости и скачкам угла набора высоты при достижении высоты
полета 10 000 футов.
Многокритериальная оптимизация, учитывающая кроме расхода топлива
выбросы CO2 и NOx, рассматривается в [4], где отмечается, что в зависимо-
сти от условий полета выбросы NOx могут быть непропорциональны расходу
топлива. Так как этап набора высоты часто происходит в густонаселенных
районах, сокращение вредных выбросов является одним из основных факто-
ров оптимизации.
Экологический критерий оптимизации как сумма расхода топлива и уров-
ня шума рассмотрен в [5]. Здесь задача оптимизации сформулирована как за-
дача терминального управления и предложено ее решение псевдоспектраль-
ным методом Чебышева. Рассмотрена оптимизация набора высоты дальнема-
гистрального самолета для четырех значений начальной массы и проведено
сравнение с записями данных реальных полетов. Полученную значительную
экономию топлива от 7 до 23% оптимального решения по сравнению с ре-
альными полетами можно объяснить тем, что, во-первых, при оптимизации
не учитывалось время, затраченное на набор высоты, и это время получи-
лось примерно на 30% больше при практически том же расстоянии полета,
а во-вторых, в модели не учитываются ограничения на допустимое ускоре-
ние и доступную тягу, что видно на приведенных графиках скорости. Поэто-
му важно находить значение критерия оптимизации по более точной модели
системы.
Статья организована следующим образом. В разделе 2 описана матема-
тическая модель движения центра масс воздушного судна без маневрирова-
ния по курсу. Это система с двумя степенями свободы: управление тягой и
тангажом, которые формируются в соответствии с выбранными значения-
ми скорости и угла наклона траектории. При том, что большую часть этапа
набора высоты значение тяги получается равным максимально доступному,
рассмотрен также вариант системы с одной степенью свободы управле-
ние тангажом, тогда как тяга принимается равной максимально доступной.
В разделе 3 приведена постановка задачи оптимизации, где вектор варьируе-
мых переменных это значения уставок для соответствующих регуляторов
калиброванной приборной скорости и угла наклона траектории на каждом
участке равной длины, на которые разбивается этап набора высоты, а целе-
вая функция это расход топлива на этапе со штрафами за время и недо-
стижение заданных значений скорости и высоты в конце этапа. В разделе 4
предложен алгоритм оптимизации, основанный на покоординатном спуске с
учетом ограничений и со вспомогательными точками-кандидатами. Пример
85
оптимизации набора высоты среднемагистрального пассажирского самолета
представлен в разделе 5. Заключительные выводы приведены в разделе 6.
2. Математическая модель движения воздушного судна
Модель движения центра масс воздушного судна может быть описана сле-
дующей системой дифференциальных уравнений [1, 6, 7]:
mV = T cos(α + φ) -1cxρSV2 - mg sin Θ + V qc,
2
mVΘ = T sin(α + φ) +1cyρSV2 - mg cos Θ,
2
h=VsinΘ,
(1)
L=VcosΘ+Vw,
m= -qc,
˙
T
= -k1T + k2δT ,
θ=-k3θ + k4δθ,
где m масса воздушного судна (кг), V воздушная скорость (м/с), T
суммарная тяга двигателей (Н), α угол атаки (рад), φ угол установки
двигателей (рад), cx, cy аэродинамические коэффициенты лобового сопро-
тивления и подъемной силы, ρ плотность воздуха (кг/м3), S площадь
крыла (м2), g
ускорение свободного падения (м/с2), Θ угол наклона
траектории (рад), h высота полета (м), L пройденное расстояние (м),
Vw скорость попутной/встречной составляющей ветра (м/с), qc секунд-
ный расход топлива (кг/с), θ тангаж угол между осью воздушного судна
и горизонтом (рад), δT , δθ
значения сигналов управления, k1, k2, k3, k4
коэффициенты упрощенных моделей первого порядка динамики тяги и тан-
гажа. Точное моделирование тяги это фактически моделирование работы
двигателя, которая описывается намного более сложной системой уравнений
с большим количеством параметров. Для целей оценки расхода топлива пред-
лагается учитывать только доминирующую динамику.
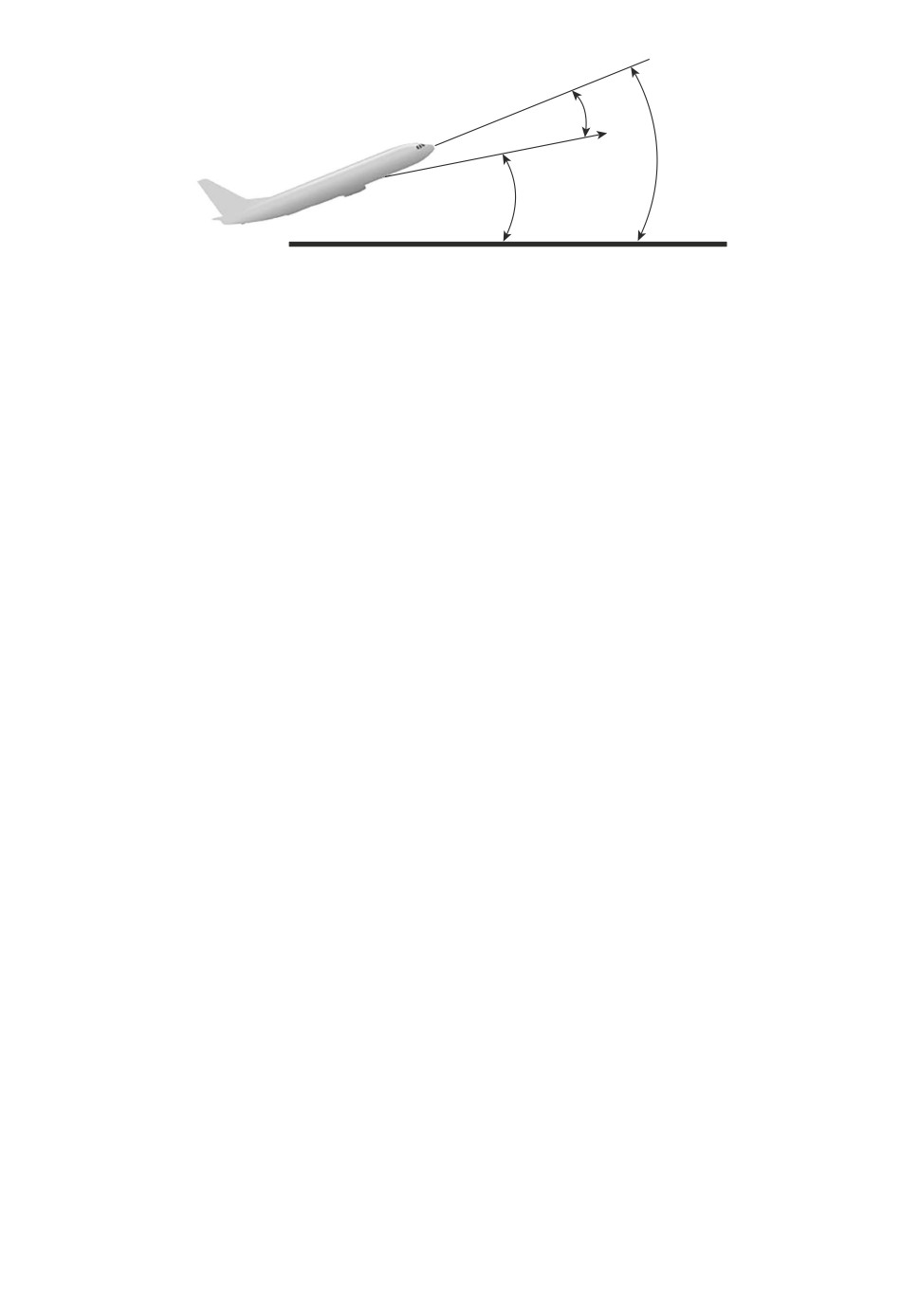
К этим дифференциальным уравнениям нужно добавить, что угол атаки
определяется как разность тангажа и угла наклона траектории, как показано
на рис. 1:
(2)
α = θ - Θ,
а секундный расход топлива это произведение тяги и удельного расхода
топлива η (кг/с/Н):
(3)
qc
= ηT.
Переменные системы (1)-(3) можно разбить на несколько групп:
1) переменные состояния системы дифференциальных уравнений:
m,V,Θ,h,L,T,θ, для которых требуется задать начальные значения;
86
a
q
Q
Рис. 1. Углы тангажа θ, атаки α и наклона траектории Θ. Стрелкой показано
направление движения центра масс.
2) известные константы: φ, S, k1, k2, k3, k4
должны быть заданы для
исследуемой модели воздушного судна, g принимаем равным стандартному
значению g0 = 9, 80665;
3) параметры атмосферы: значение ρ в зависимости от текущей высоты в
этой работе определяем из стандартной атмосферы [8] или оно может быть
получено из данных температуры и давления реальной атмосферы; скорость
ветра в этой работе не учитываем, и значение Vw принимаем равным 0;
4) значения табличных или аппроксимирующих функций, заданных для
исследуемой модели воздушного судна, в зависимости от текущих значений
переменных состояния: аэродинамические коэффициенты cx и cy зависят от
угла атаки α и числа Маха M = V/a, где a скорость звука на текущей
высоте полета; удельный секундный расход топлива η зависит от текущих
значений высоты, числа Маха и тяги [9];
5) вычисляемые значения угла атаки α и секундного расхода топлива qc
по формулам (2) и (3) соответственно;
6) значения сигналов управления δT , δθ.
Значения δT , δθ формируются системой управления, работу которой также
надо моделировать. Если точная реализация системы управления доступна
и ее вычислительная сложность не велика, то можно моделировать ее пол-
ностью. При использовании упрощенной модели системы управления необхо-
димо добиться схожих переходных процессов, в том числе для управляющих
сигналов для корректной оценки расхода топлива. В настоящей статье бу-
дем моделировать систему управления вычислительно простыми алгоритма-
ми ПИД- и ПИ-регуляторов, коэффициенты которых подобраны так, чтобы
переходные процессы были близки к реальной системе.
Предполагается, что на этапе набора высоты управление тягой формиру-
ется ПИД-регулятором скорости:
(4)
δT = PID(VSP - VCAS
),
где VSP требуемое значение калиброванной приборной скорости (узлы), а
VCAS текущее значение калиброванной приборной скорости, которое можно
87
вычислить по стандартной формуле [10]:
v
u
((
)2/7
)
u
P
(5)
VCAS = a0√5
((1 + 0,2M2)3,5 - 1) + 1
-1 ,
P0
где a0, P0 скорость звука и давление на уровне моря в стандартной атмо-
сфере, P давление на текущей высоте, M число Маха. Таким образом,
калиброванная приборная скорость определяется значениями переменных со-
стояния V и h. Требуемое значение VSP должно определяться исходя из це-
лей оптимизации с учетом ограничений на допустимые значения. Заметим,
что истинная воздушная скорость V в системе (1), соответствующая значе-
нию VCAS, зависит от высоты, т.е. при постоянном значении калиброванной
приборной скорости VCAS значение истинной воздушной скорости V должно
возрастать с ростом высоты.
Следует учитывать, что в конце этапа набора высоты нужно выйти на
заданную скорость начала крейсерского полета, которая выражена числом
Маха MSP, и в крейсерском полете регулятор поддерживает заданное чис-
ло Маха. Поэтому при достижении заданной скорости начала крейсерского
полета регулятор тяги должен переключиться на заданное число Маха MSP
вместо калиброванной приборной скорости:
(6)
δT = PID(MSP
− M).
Будем также предполагать, что управление тангажом формируется
ПИ-регулятором угла наклона траектории:
(7)
δθ = PI(ΘSP
− Θ),
где ΘSP требуемое значение угла наклона траектории, которое при дости-
жении заданной высоты начала крейсерского полета hSP формируется регу-
лятором высоты:
(8)
ΘSP = Kh(hSP
− h).
Таким образом, заданные значения VSP и ΘSP для заданных начальных
условий определяют полет воздушного судна в соответствии с уравнениями
(1)-(5), (7) до достижения заданных целевых значений набора высоты: числа
Маха MSP, когда регулятор (4) заменяется на (6), и высоты hSP, когда уставка
для регулятора (7) формируется регулятором (8). Численно моделируя полет
на некотором участке, можно получить значение расхода топлива на этом
участке, а также значения скорости и высоты, достигнутые в конце этого
участка. При этом необходимо учитывать существующие ограничения:
технические это допустимые минимальная и максимальная калибро-
ванные приборные скорости VCASmin , VCASmax , максимально допустимые угол
атаки α, ускорение и скороподъемность, доступная тяга двигателей T ;
диспетчерские например, во многих аэропортах действует ограниче-
ние VCAS < 250 узлов для высоты h < 10 000 футов;
88
целевые скорость и высота в конце этапа должны отличаться от тре-
буемых на величину не более заданной погрешности.
На рассматриваемом этапе доступная тяга двигателей это не предельное
значение, а значение, рекомендуемое для этапа набора высоты (положение
“Climb” на рычаге управления двигателями). Кроме того, при неизменном
значении управления тягой само значение тяги зависит от скорости и атмо-
сферного давления при росте скорости и высоты значение тяги снижает-
ся. При моделировании для получения значения доступной тяги Tmax можно
использовать аппроксимирующие формулы [9]. Если принять приоритет ско-
рости, то требуемое значение угла наклона траектории должно выбираться
какΘSP = min(ΘSP,Θ), гдеΘ максимально возможный угол наклона тра-
ектории для текущих условий, определяемый из (1) для значения доступной
тяги Tmax:
((
)
)
(9)
Θ= arcsin Tmax cos(α + φ) -1cxρSV2 - mV
/mg
2
Особенность этапа набора высоты состоит в том, что большую часть вре-
мени необходимо использовать всю доступную тягу, чтобы обеспечить уско-
рение и набор высоты. На таких участках вместо предпоследнего уравне-
ния системы (1), моделирующего тягу, и регулятора тяги (4) можно принять
T = Tmax, а управление тангажом будет осуществляться для поддержания
заданной скорости:
(10)
δθ = PID(VSP - VCAS
).
Такой режим может сохраняться до того момента, когда будет достигнута
заданная высота в конце этапа. После этого управление тангажом переклю-
чается на регулятор угла наклона траектории (7), где ΘSP определяется раз-
ницей заданного и текущего значений высоты. При достижении заданных
скорости MSP и высоты hSP включается управление тягой (6).
3. Постановка задачи
В работе рассматривается задача оптимизации расхода топлива воздуш-
ного судна на этапе набора высоты при предположении прямолинейного дви-
жения, т.е. без учета маневрирования по курсу. Предполагается, что заданы
параметры воздушного судна: константы φ, S, таблицы и аппрокси-
мирующие формулы для аэродинамических коэффициентов cx(α, M) и
cy(α,M), коэффициенты k1,k2,k3,k4 для системы (1), формулы и коэффици-
енты регуляторов (4), (6), (7), (8), аппроксимирующие формулы для расчета
удельного расхода топлива η(h, M, T ) и доступной тяги Tmax(h, VCAS);
начальные значения переменных состояния системы (1): m, V , Θ, h, L,
T,θ;
ограничения допустимых значений: скорости VCAS ∈ [VCASmin , VCASmax ],
V
углов наклона траектории Θ ≤ Θmax и атаки α ≤ αmax, ускорения
≤V˙max
и скороподъемности V sin Θ ≤ Vvertmax ;
89
значения скорости MSP и высоты hSP, которые должны быть достигну-
ты в конце этапа набора высоты, и допустимые погрешности εM и εh;
горизонтальное расстояние полета R, отведенное на этап набора высоты,
достаточное и с некоторым запасом, чтобы заданные значения скорости и
высоты в конце этапа могли быть достигнуты.
Тогда, как следует из приведенного выше описания динамики движения
воздушного судна, необходимо определить для каждого момента времени
требуемые значения калиброванной приборной скорости VSP и угла накло-
на траектории ΘSP, обеспечивающие при соблюдении всех ограничений вы-
ход на заданные значения скорости и высоты в конце этапа с минимальным
расходом топлива. Предлагается формировать значения VSP и ΘSP как ку-
сочно-постоянные функции, разделив расстояние этапа на n участков равной
длины, на каждом из которых будут использоваться постоянные значения
VSPi, ΘSPi, i = 1,... ,n. В конце расстояния, отведенного на этап набора вы-
соты, нужно предусмотреть участок длиной rfin, на котором управление осу-
ществляется исходя из требуемых значений скорости и высоты в конце этапа.
Тогда целевые значения скорости или высоты не будут достигнуты только в
случае выбора слишком низких значений VSPi или ΘSPi , а в остальных слу-
чаях этот финальный участок может давать дополнительный расход топлива
при неоптимальном выборе значений VSPi и ΘSPi . Таким образом, при за-
данных значениях R, rfin и n длина участков равна r =R-rfinn.
Задача 1. Для этапа набора высоты для заданных параметров воздуш-
ного судна, начальных условий, расстояния, отведенного на этап набора вы-
соты, и числа участков n определить значения вектора
(11)
x = [VSP1,... ,VSPn,ΘSP1,...,ΘSPn]
такие, что при соблюдении заданных ограничений на скорость, угол накло-
на траектории, ускорение, скороподъемность и доступную тягу двигателей
минимизируется функционал
tcl
∫
(12)
f (x) = qc(t)dt + C1tcl + C2(M) |MSP - M(tcl)| + C3(h) |hSP - h(tcl
)| ,
0
где tcl
время, затраченное на прохождение расстояния R, а C1, C2, C3
весовые коэффициенты.
Для того, чтобы незначительные отклонения полученных в конце этапа
значений скорости M(tcl) и высоты h(tcl) от заданных не влияли на резуль-
тат оптимизации, нужно определить допустимые погрешности εM и εh и при
выполнении условий |MSP - M(tcl)| < εM и |hSP - h(tcl)| < εh принимать зна-
чения C2(M) и C3(h) равными 0. При превышении допустимых погрешностей
значения весовых коэффициентов C2(M) и C3(h) должны быть достаточно
большими, чтобы полученное значение функционала (12) не могло быть оп-
тимальным.
90
Итак, в функционале (12) первое слагаемое соответствует расходу топлива
на этапе, второе учитывает время, затраченное на этап, а третье и четвер-
тое
это штрафы за недостижение заданных скорости и высоты в конце
этапа. Про второе слагаемое поясним, что хотя здесь нет задачи минимиза-
ции времени полета, но есть задача прилета в заданное время. Эта задача
решается при оптимизации этапов крейсерского полета и снижения, и ес-
ли уменьшение времени, отведенного на эти этапы приводит к увеличению
расхода топлива, то это должно быть учтено при оптимизации набора вы-
соты выбором весового коэффициента C1. Его значение должно быть равно
дополнительному расходу топлива на последующих этапах при сокращении
времени, оставленного на эти этапы, на 1 секунду.
4. Алгоритм оптимизации
В задаче оптимизации, соответствующей задаче 1, вектор варьируемых пе-
ременных (11) состоит из двух групп: x = [x1, x2], где x1 = [VSP1 , . . . , VSPn ]
значения скорости, x2 = [ΘSP1 , . . . , ΘSPn ] значения угла наклона траекто-
рии для каждого из участков. Таким образом, i-му участку полета соответ-
ствуют i-е элементы обеих групп. Для варьируемых переменных заданы огра-
ничения:
(13)
VSPi ∈ [VCASmin,VCASmax ], ΘSPi ∈ [0,Θmax
],
i = 1,...,n,
которые можно записать как xi ∈ [lbi, ubi], i = 1, . . . , 2n, где lbi, ubi соответ-
ствующие нижняя и верхняя границы для i-го элемента вектора x. При этом
нужно учитывать, что дополнительные ограничения, такие как ограничение
скорости на высоте до 10 000 футов и ограничение угла наклона траектории,
обусловленное доступной максимальной тягой, здесь не описываются, так как
зависят от текущих значений переменных состояния и не могут быть привя-
заны к участкам, связанным только с расстоянием. Эти ограничения должны
быть реализованы в процедуре численного моделирования при вычислении
значения целевой функции.
Значение целевой функции (12) это результат численного решения си-
стемы нелинейных дифференциальных и алгебраических уравнений (1)-(10),
поэтому ее градиент практически недоступен. Следует отметить, что реше-
ние для любого вектора варьируемых переменных находится для одинакового
расстояния R независимо от момента достижения заданных скорости и высо-
ты в конце этапа, т.е. сравниваются расход топлива и время для расстояния,
отведенного на этап набора высоты, с дополнительными штрафами при недо-
стижении заданных целевых значений скорости и высоты.
Задачу поиска минимума целевой функции (12) для вектора варьируемых
переменных (11) в границах (13) предлагается решать детерминированным
методом, основанным на покоординатном спуске [11, 12], с вспомогательны-
ми точками-кандидатами. Особенности вычисления целевой функции ставят
дополнительные задачи алгоритму оптимизации. Одна из них это необ-
91
ходимость учитывать, что выбранное значение угла наклона траектории на
i-м участке, удовлетворяющее ограничениям (13), может быть не реализовано
из-за ограничения доступной тяги (9), и тогда для различных вариантов век-
тора варьируемых переменных (11) могут получаться одинаковые значения
целевой функции. Для эффективного поиска реализован выбор x с меньшим
значением угла наклона траектории при отличии значений целевой функции
на величину, меньшую заданного порога εf .
Другая особенность это неявные ограничения на итоговые скорость MSP
и высоту hSP, реализованные как элементы целевой функции. Хотя для их
достижения выделен отдельный участок, предыдущая ¾программа¿ набора
высоты может быть такой, что эти требуемые значения скорости и/или вы-
соты будут не достижимы. Для получения решения, удовлетворяющего ос-
новной задаче этапа набора высоты выход на заданные значения скорости
и высоты, необходим выбор соответствующих весовых коэффициентов C2, C3
в целевой функции (12).
Итак, для решения задачи 1 предлагается следующий алгоритм оптими-
зации.
Алгоритм 1.
1. Выбрать начальную точку x0 = [x1,(0), x2,(0)] : x0i ∈ [lbi, ubi].
2. Рассчитать рекордное значение целевой функции f∗ = f(x0).
3. Инициировать счетчики:
l=0
общий счетчик итераций,
k1 = k2 = 1 внутренние счетчики для каждой группы переменных,
lbad = 0
счетчик неэффективных шагов.
4. Выбрать блок переменных j = mod(l, 2) + 1.
5. Выбрать основную изменяемую компоненту kj в блоке переменных xj и
увеличить ее счетчик: kj ← (mod(kj + 1, n) + 1).
6. Сформировать набор точек-кандидатов X = {xa, xb, . . .} на основе вы-
бранной группы и изменяемой компоненты.
7. Вычислить целевую функцию во всех точках-кандидатах и выбрать сре-
ди них минимальное значение и соответствующую точку
xcand = arg min f(x).
x∈X
8. Если значение функции удалось улучшить (f(xcand) < f∗), то изменить
текущую точку x(l+1) ← xcand, рекордное значение f∗ ← f(xcand), сбросить
счетчик неэффективных шагов lbad ← 0 и перейти к шагу 4.
9. Если значение целевой функции не улучшается, но близко к рекорду
(f(xcand) < f∗ + εf ), а угол подъема уменьшился, то изменить текущую точ-
ку x(l+1) ← xcand, увеличить счетчик неэффективных шагов lbad ← lbad + 1 и
перейти к шагу 4.
10. В противном случае сохранить текущую точку x(l+1) ← x(l) и рекорд-
ное значение, увеличить счетчик неэффективных шагов lbad ← lbad + 1.
11. Если счетчик неэффективных шагов равен числу переменных lbad =
= 2n, то завершить алгоритм и вернуть в качестве решения текущую точ-
92
ку x(l) и соответствующий расход топлива f(x(l)). В противном случае перей-
ти к шагу 4.
Изменение основной выбранной компоненты k характеризуется парамет-
ром алгоритма γ, играющим роль длины шага, причем его значение различно
для каждой группы (скорости и угла наклона траектории). Подзадача выбо-
ра точек-кандидатов состоит в подборе нескольких ¾соседних¿ по отношению
к текущей точке, также удовлетворяющих ограничениям. Первые две точки
соответствуют изменению одной компоненты:
xak = max{xk - γ, lbk},
xbk = min{xk + γ, ubk},
xai = xbi = xi, i = k.
Здесь операции минимума и максимума гарантируют, что значение
k-й компоненты не выйдет за имеющиеся границы. Очевидно, что если те-
кущее значение уже находится на своей границе, то соответствующее изме-
нение координаты не требуется, так как точка-кандидат будет совпадать с
исходной точкой. Например, если xk = lbk, то xak = xk, и набор кандидатов
состоит только из одной точки xb.
Ещe четыре точки-кандидата формируются изменением соседних компо-
нент:
k>1:
γc = min{γ, xk - lbk, ubk-1 - xk-1},
xck = xk - γc,
xck-1 = xk-1 + γc,
xcj = xj, j = k,k - 1,
γd = min{γ, ubk - xk, xk-1 - lbk-1},
xdk = xk + γd,
xdk-1 = xk-1 - γd,
xdi = xi, i = k,k - 1,
k<n:
γe = min{γ, xk - lbk, ubk+1 - xk+1},
xek = xk - γe,
xek+1 = xk+1 + γe,
xei = xi, i = k,k + 1,
γf = min{γ, ubk - xk, xk+1 - lbk+1},
xfk = xk + γf,
xfk+1 = xk+1 - γf,
xfi = xi, i = k,k + 1.
Таким образом, формируется до шести точек-кандидатов.
93
Для вектора x = [x1, x2] размерности 2n, включающего компоненты обеих
групп, реализовано формирование точек-кандидатов, которые одновремен-
но изменяют переменные из двух групп, относящиеся к одному и тому же
участку. Это даeт четыре дополнительных точки-кандидата для выбранной
основной компоненты k:
xak = max{xk - γspeed, lbk} ,
xan+k = min {xn+k + γangle, ubn+k},
xai = xi, i = k,n + k,
xbk = max{xk - γspeed, lbk} ,
xbn+k = max{xn+k - γangle, lbn+k} ,
xbi = xi, i = k,n + k,
xck = min {xk + γspeed, ubk} ,
xcn+k = max{xn+k - γangle, lbn+k} ,
xci = xi, i = k,n + k,
xdk = min {xk + γspeed, ubk} ,
xdn+k = min {xn+k + γangle, ubn+k},
xdi = xi, i = k,n + k.
Итого, может быть сформировано до 10 точек-кандидатов для выполнения
шага 4 алгоритма 1. Отметим, что каждое вычисление целевой функции тре-
бует моделирования всего этапа набора высоты, поэтому большое число кан-
дидатов может негативно сказаться на общем времени работы алгоритма.
5. Пример
Предложенный в настоящей работе алгоритм оптимизации реализован в
среде программирования Matlab. Для его проверки разработана процедура
вычисления целевой функции (12), реализующая численное моделирование
системы (1)-(10) методом Эйлера первого порядка с шагом 1 с, что обеспечи-
вает достаточную точность моделирования при невысокой вычислительной
сложности. Выбор шага соответствует постоянным времени моделируемой
системы управления. В [1], где исследовалось моделирование крейсерского
полета с учетом переходных процессов, в том числе и при изменении высо-
ты полета, отмечено, что в рассматриваемой системе моделирование методом
Эйлера не дает заметной ошибки по сравнению с методом Рунге-Кутты чет-
вертого порядка.
В табл. 1 для моделируемого среднемагистрального пассажирского само-
лета приведены начальные значения, ограничения и требуемые значения, ко-
торые должны быть достигнуты в конце этапа. Ограничение VCAS < 250 уз-
лов для высоты h < 10 000 футов также будет учитываться.
94
Таблица 1. Параметры моделирования
Наименование
Обозначение Значение Комментарий
Начальная масса
m0
75000 кг
75 т
Начальная высота
h0
457 м
1500 футов
Требуемая конечная высота
hSP
10363,2 м
FL340
Начальная скорость
VCAS0
223 узла V0 = 117,2 м/с
Требуемая конечная скорость
MSP
0,8
V = 238,3 м/с
Моделируемое расстояние
R
250000 м
250 км
Размер финального участка
rfin
50000 м
50 км
Минимальная скорость
VCASmin
200 узлов
Максимальная скорость
VCAS
max
300 узлов
Максимальное ускорение
0,2 м/с2
Максимальная скороподъемность
20 м/с
Максимальный наклон траектории
Θmax
15 град
Число участков
n
10
Таблица 2. Результаты оптимизации для начальной массы m0 = 75 т
Вариант
Расход
Номер
Вариант оптимизации
Время, с
управления топлива, кг
1
Стандартный профиль
1
1443
1225
2
Минимальный расход
1
1419
1273
3
Минимальное время
1
1455
1218
4
Комбинированный (C1 = 0,4)
1
1429
1234
5
Стандартный профиль
2
1446
1217
6
Минимальный расход
2
1431
1249
7
Минимальное время
2
1445
1218
8
Комбинированный (C1 = 0, 4)
2
1433
1233
Стандартный профиль набора высоты состоит из трех участков:
1) для h < 10 000 футов требуемое значение скорости принимается равным
максимально разрешенному значению для этих высот VSP1 = 250 узлов;
2) для h ≥ 10 000 футов требуемое значение скорости принимается равным
максимально разрешенному значению VSP2 = 300 узлов;
3) при достижении заданного значения скорости MSP переключаемся с ре-
гулятора калиброванной приборной скорости на регулятор скорости в Махах
с требуемым значением MSP.
Угол наклона траектории при этом выбирается максимально возможный для
текущего значения доступной тяги и допустимых значений ускорения и ско-
роподъемности.
Результаты оптимизации будем сравнивать с результатом набора высоты
по этому профилю. В табл. 2 приведены значения расхода топлива и време-
ни, затраченного на прохождение расстояния R для стандартного профиля,
оптимального по расходу топлива без учета времени, когда в минимизируе-
95
мой функции (12) весовой коэффициент C1 = 0, оптимального по времени
без учета расхода (C1 = 1000) и по комбинированному критерию (C1 = 0,4).
При оптимизации по комбинированному критерию значение весового коэф-
фициента C1 должно выбираться исходя из дополнительного расхода топлива
на этапе крейсерского полета при сокращении времени, отведенного на этот
этап. Значение C1 = 0,4 получено моделированием последующего крейсерско-
го полета на расстояние 1000 км с разницей по выделенному времени в 1 мин.
Полученная разница в расходе, деленная на 60 для оценки разницы за 1 с,
составила примерно 0,4 кг, и была принята как значение весового коэффи-
циента C1. Остальные весовые коэффициенты функционала (12) выбраны
C2 = 20000 и C3 = 2 при εM = 0,001 и εh = 10.
Проведены моделирование стандартного профиля и оптимизация для двух
вариантов системы управления:
1) с управлением тягой (4) с переходом на регулятор (6) при достижении
заданного числа Маха и управлением тангажом (7) и
2) с тягой, равной доступной тяге Tmax для текущих условий полета (ав-
томат тяги выключен) и управлением тангажом (10), пока не будут достиг-
нуты заданные число Маха и высота, после чего включается автоматическое
управление тягой (6) и управление тангажом (7), поддерживающее заданную
высоту.
Число участков выбрано n = 10. Оптимизация для n = 20 также прово-
дилась, но получены практически такие же результаты. Очевидно, что для
расстояния, необходимого для набора высоты, выбор числа участков больше
10 не должен давать преимущества. Выбор n = 5 также дает близкие резуль-
таты, поэтому при практической реализации, когда быстродействие работы
алгоритма важно, следует более тщательно исследовать выбор минимально-
го числа участков, что сократит число варьируемых переменных. Следует
также заметить, что при оптимизации системы с управлением вида 2 ва-
рьируется только скорость на каждом участке, а угол наклона траектории
формируется максимально возможный. Поэтому в этом случае число варьи-
руемых переменных равно n, а не 2n, как при реализации управления вида 1.
По результатам оптимизации видно, что вариант управления 2, когда не
задействовано автоматическое управление тягой до тех пор, пока не достиг-
нуты заданные значения скорости и высоты в конце этапа, и при этом исполь-
зуется максимальная доступная тяга, не позволяет достичь такого минималь-
ного значения расхода топлива при выборе значения весового коэффициента
C1 = 0, какое получается при варианте управления 1. Но, с другой стороны,
вариант управления 2 позволяет получить меньший расход топлива при по-
иске профиля с минимальным временем без учета расхода, и стандартный
профиль является оптимальным в этом случае.
Вариант управления 1 при минимизации расхода с C1 = 0 дает экономию
топлива более 1,5% по сравнению со стандартным профилем, но при этом вре-
мя полета на этапе увеличивается на 48 с. Оптимизация с выбором весового
96
500
1: VCAS
1: V
450
2: VCAS
2: V
400
3: VCAS
3: V
350
4: VCAS
4: V
300
250
200
0
200
400
600
800
1000
1200
1400
Время, с
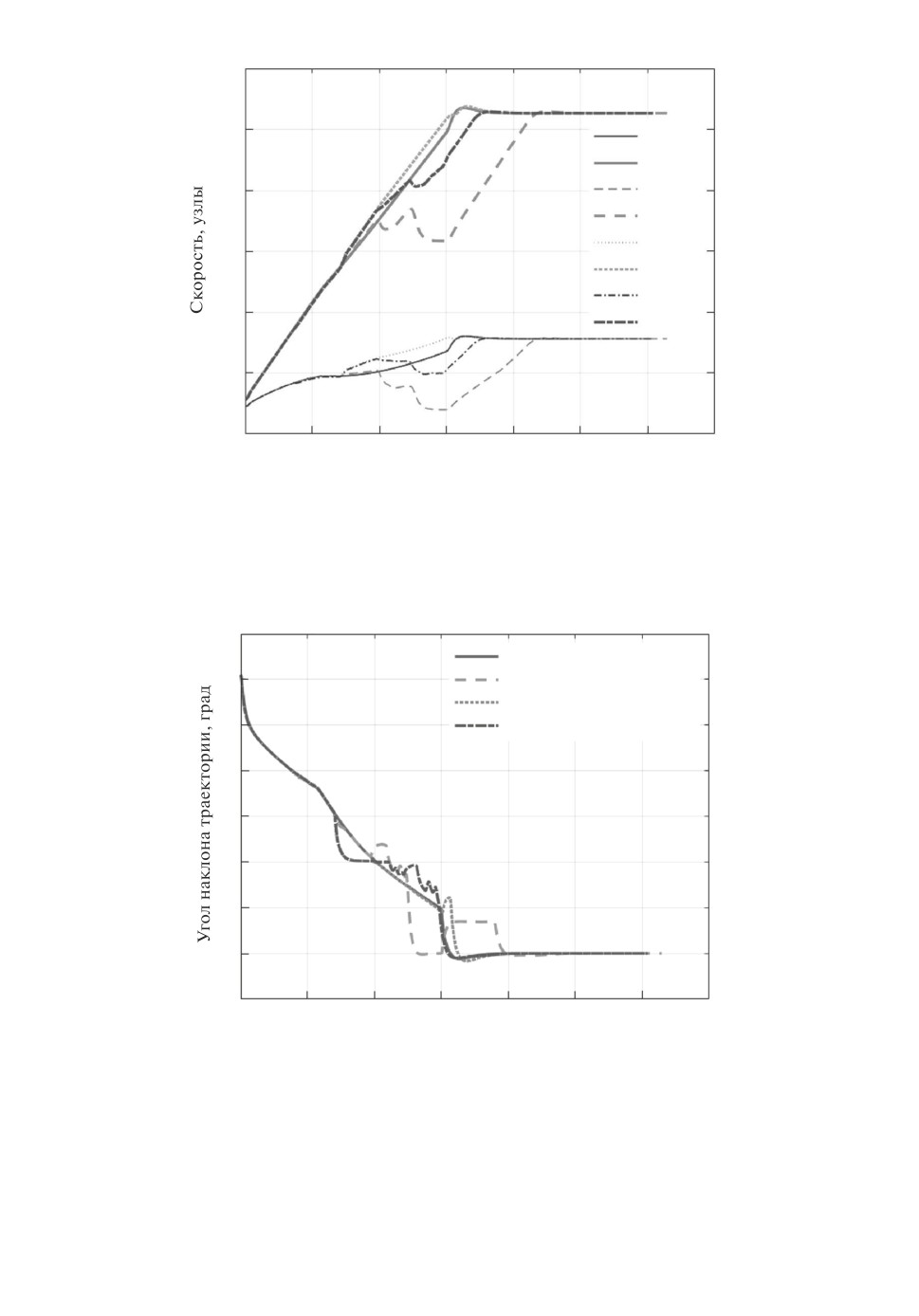
Рис. 2. Приборная VCAS и истинная воздушная V скорости для стандартного
профиля (1), минимизации расхода топлива (2), минимизации времени (3) и
комбинированной оптимизации (4) с вариантом управления 1.
10
1: стандартный
2: минимальный расход
8
3: минимальное время
4: комбинированный
6
4
2
0
-20
200
400
600
800
1000
1200
1400
Время, с
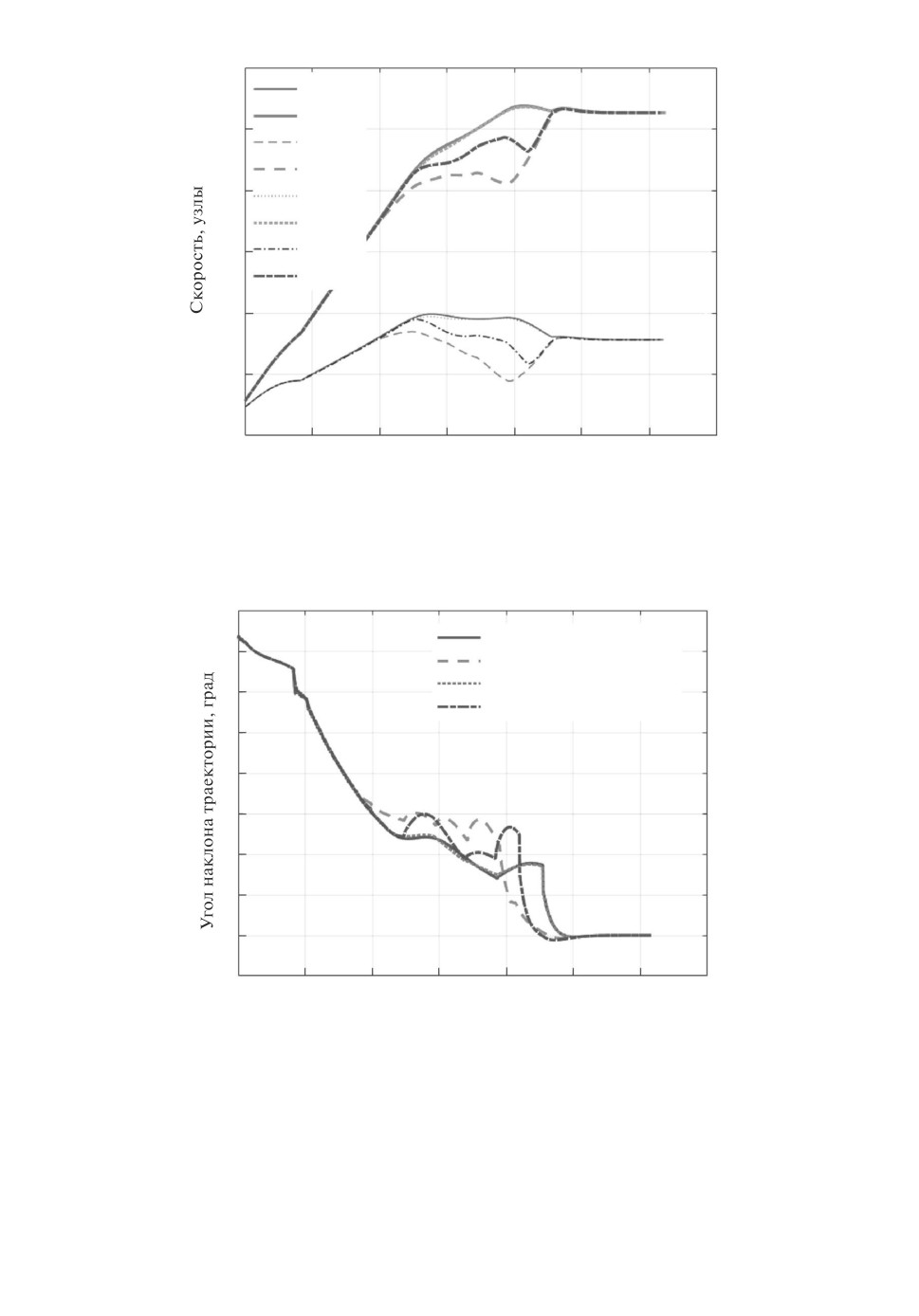
Рис. 3. Угол наклона траектории Θ для стандартного профиля (1), мини-
мизации расхода топлива (2), минимизации времени (3) и комбинированной
оптимизации (4) с вариантом управления 1.
коэффициента C1 = 0,4 обеспечивает экономию топлива в размере 1% при
увеличении времени всего на 9 с по сравнению со стандартным профилем.
Графики калиброванной приборной и истинной воздушной скоростей для
стандартного профиля и трех вариантов оптимизации приведены на рис. 2
97
500
1: VCAS
1: V
450
2: VCAS
2: V
400
3: VCAS
3: V
350
4: VCAS
4: V
300
250
200
0
200
400
600
800
1000
1200
1400
Время, с
Рис. 4. Приборная VCAS и истинная воздушная V скорости для стандартного
профиля (1), минимизации расхода топлива (2), минимизации времени (3) и
комбинированной оптимизации (4) с вариантом управления 2.
8
1: стандартный
7
2: минимальный расход
3: минимальное время
6
4: комбинированный
5
4
3
2
1
0
-1 0
200
400
600
800
1000
1200
1400
Время, с
Рис. 5. Угол наклона траектории Θ для стандартного профиля (1), мини-
мизации расхода топлива (2), минимизации времени (3) и комбинированной
оптимизации (4) с вариантом управления 2.
для варианта управления 1 и на рис. 4 для варианта управления 2. Анало-
гично на рис. 3 и 5 приведены графики изменения угла наклона траектории.
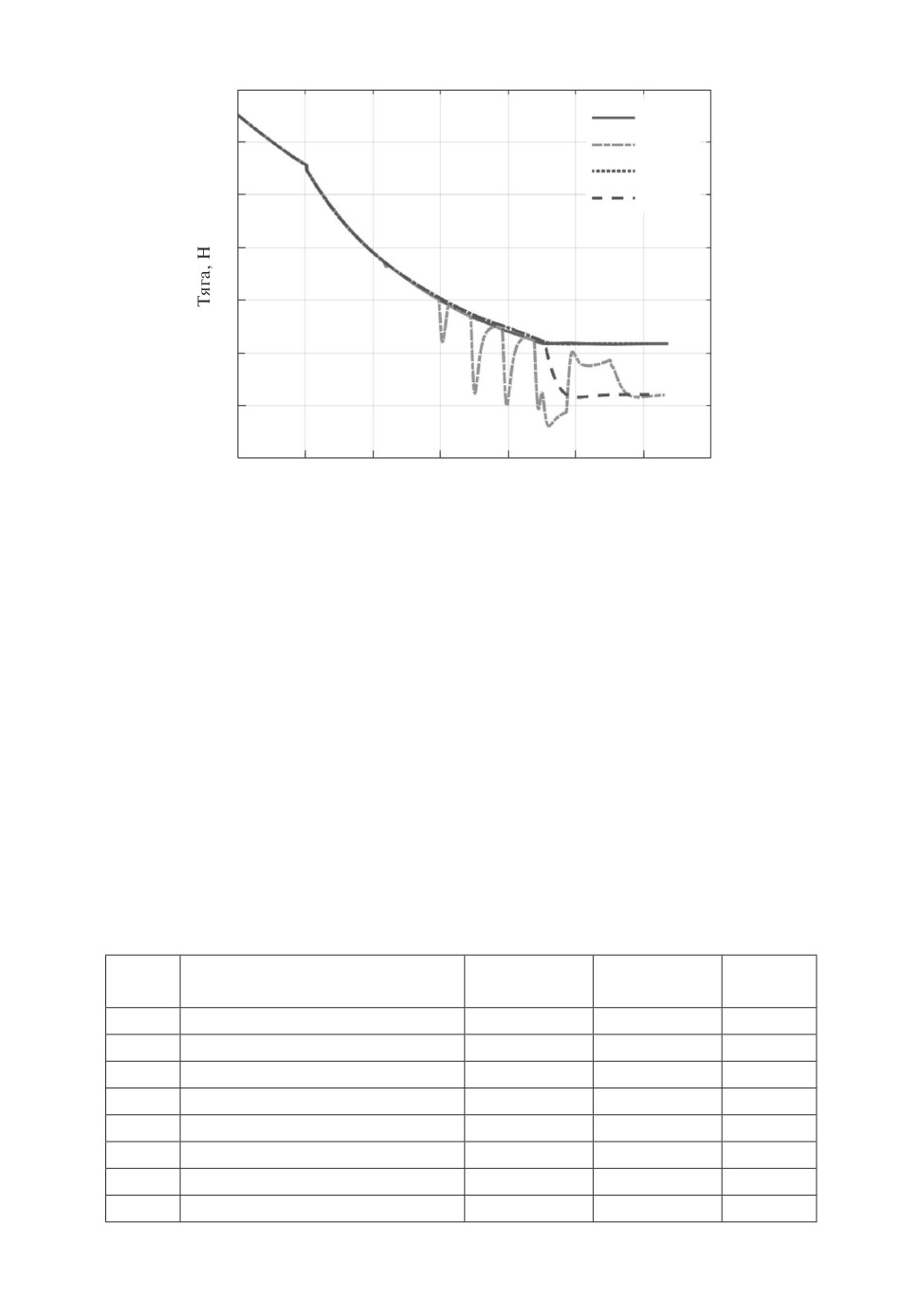
Графики полученной и максимальной доступной тяги приведены на рис. 6.
98
´104
16
1: Tmax
14
1: T
2: Tmax
12
2: T
10
8
6
4
2
0
200
400
600
800
1000
1200
1400
Время, с
Рис. 6. Значение тяги T и доступная тяга Tmax при минимизации расхода топ-
лива с вариантом управления 1 (1) и для стандартного профиля с вариантом
управления 2 (2).
В табл. 3 приведены значения расхода топлива и времени, полученные
для таких же вариантов оптимизации, но для примера воздушного судна
с неполной загрузкой, т.е. при тех же остальных исходных данных табл. 1
начальная масса принята равной m0 = 55 тонн.
В этом случае при варианте управления 2 оптимизация не дает заметно-
го выигрыша по сравнению со стандартным профилем. При использовании
управления тягой в варианте управления 1 можно получить небольшую эко-
номию топлива. Графики калиброванной приборной и истинной воздушной
скоростей для стандартного профиля и трех вариантов оптимизации для ва-
Таблица 3. Результаты оптимизации для начальной массы m0 = 55 т
Вариант
Расход
Номер
Вариант оптимизации
Время, с
управления топлива, кг
1
Стандартный профиль
1
1136
1211
2
Минимальный расход
1
1123
1258
3
Минимальное время
1
1139
1203
4
Комбинированный (C1 = 0, 4)
1
1132
1216
5
Стандартный профиль
2
1143
1202
6
Минимальный расход
2
1139
1211
7
Минимальное время
2
1142
1203
8
Комбинированный (C1 = 0, 4)
2
1139
1207
99
500
450
1: VCAS
1: V
400
2: VCAS
2: V
3: VCAS
350
3: V
4: VCAS
300
4: V
250
200
0
200
400
600
800
1000
1200
1400
Время, с
Рис. 7. Приборная VCAS и истинная воздушная V скорости для стандартного
профиля (1), минимизации расхода топлива (2), минимизации времени (3) и
комбинированной оптимизации (4) с вариантом управления 1 при неполной
загрузке.
14
1: стандартный
12
2: минимальный расход
3: минимальное время
10
4: комбинированный
8
6
4
2
0
-2
0
200
400
600
800
1000
1200
1400
Время, с
Рис. 8. Угол наклона траектории Θ для стандартного профиля (1), мини-
мизации расхода топлива (2), минимизации времени (3) и комбинированной
оптимизации (4) с вариантом управления 1 при неполной загрузке.
рианта управления 1 приведены на рис. 7, а на рис. 8 приведены графики
изменения угла наклона траектории.
100
6. Заключение
Предложенный алгоритм оптимизации быстро сходится несмотря на слож-
ную структуру целевой функции, что позволяет использовать его в бортовых
системах управления самолетовождением. Тем не менее практическая реали-
зация предлагаемого подхода осложнена тем, что значение целевой функ-
ции оптимизации вычисляется путем моделирования полета на этапе набора
высоты. При этом используются аппроксимирующие формулы удельного се-
кундного расхода топлива и доступной тяги, которые должны быть опреде-
лены для используемых двигателей, а также формулы и параметры системы
управления тягой и тангажом.
При наличии необходимых данных для моделирования применение опти-
мизации может обеспечить экономию расхода топлива до 1,5% на этапе набо-
ра высоты. Это снижение расхода по сравнению со стандартным профилем,
также разработанным для минимизации расхода топлива, поэтому результат
можно считать значимым.
Проведенное исследование для среднемагистральных самолетов подтвер-
ждает эффективность использования максимальной доступной тяги с прио-
ритетом скорости, но при достижении высоты 6000 м может быть эффектив-
ным выбор скорости исходя из критериев минимизации расхода топлива с
учетом планируемого времени полета.
СПИСОК ЛИТЕРАТУРЫ
1. Александров В.А., Зыбин Е.Ю., Косьянчук В.В., Сельвесюк Н.И., Тремба А.А.,
Хлебников М.В. Оптимизация высотно-скоростного профиля крейсерского по-
лета воздушного судна при фиксированном времени прибытия // АиТ. 2021.
№ 7. С. 69-85.
Alexandrov V.A., Zybin E.Y., Kosyanchuk V.V., Selvesyuk N.I., Tremba A.A.,
Khlebnikov M.V. Optimization of the Altitude and Speed Profile of the Aircraft
Cruise with Fixed Arrival Time // Autom. Remote Control. 2021. V. 82. No. 7.
P. 1169-1182.
2. Губарева Е.А., Мозжорина Т.Ю. Оптимизация программы полета дозвукового
пассажирского самолета на участке разгона набора высоты // Инженерный
журн.: наука и инновации. 2013. № 7(19).
3. Ghaemi R., Lax D.M., Westervelt E.R., Darnell M., Visser N. Optimal Variable-
Speed Climb for a Fixed-Wing Aircraft // AIAA 2019-3617. AIAA Aviation 2019
Forum. 2019.
4. Wan J., Zhang H., Liu F., Lv W., Zhao Y. Optimization of aircraft climb trajectory
considering environmental impact under RTA constraints // J. Advanced Transport.
V. 2020. Article ID 2738517.
5. Villegas Diaz M., Gomez Comendador V.F., Garcia-Heras Carretero J., Arnaldo
Valdes R.M. Environmental benefits in terms of fuel efficiency and noise when intro-
ducing continuous climb operations as part of terminal airspace operation // Int. J.
Sustainable Transport. 2020. V. 14. I. 12. P. 903-913.
101
6. Григоров П.Ю., Куланов Н.В. Применение концепции обратных задач динамики
в задачах вертикальной навигации // Известия РАН. Теория и системы управ-
ления. 2016. № 3. С. 130-140.
7. Hull D.G. Fundamentals of Airplane Flight Mechanics. Berlin Heidelberg: Springer-
Verlag, 2007.
8. ГОСТ 4401-81. Атмосфера стандартная. Параметры. М.: Изд-во стандартов,
2004.
9. Bartel M., Young T.M. Simplified Thrust and Fuel Consumption Models for Modern
Two-Shaft Turbofan Engines // J. Aircraft. 2008. No. 45(4). P. 1450-1456.
10. Nuic A. User Manual for the Base of Aircraft Data (BADA), Revision 3.8. EURO-
CONTROL, EEC Technical Report No. 2010-003, 2010.
11. Поляк Б.Т. Введение в оптимизацию. 2-е издание, исправленное и дополненное.
М.: ЛЕНАНД, 2014.
12. Васильев Ф.П. Методы оптимизации. М.: Факториал Пресс, 2002.
Статья представлена к публикации членом редколлегии Л.Б. Рапопортом.
Поступила в редакцию 30.04.2022
После доработки 14.07.2022
Принята к публикации 28.07.2022
102