Автоматика и телемеханика, № 11, 2022
Стохастические системы
© 2022 г. А.В. БОРИСОВ, д-р физ.-мат. наук (ABorisov@frccsc.ru)
(Федеральный исследовательский центр
“Информатика и управление” РАН, Москва)
L1-ОПТИМАЛЬНАЯ ФИЛЬТРАЦИЯ МАРКОВСКИХ
СКАЧКООБРАЗНЫХ ПРОЦЕССОВ III:
ИДЕНТИФИКАЦИЯ ПАРАМЕТРОВ СИСТЕМЫ1
Работа является продолжением цикла статей [1, 2] и посвящена реше-
нию задачи оценивания параметров скрытых марковских моделей. В ка-
честве скрытого состояния выступает однородный марковский скачкооб-
разный процесс с конечным множеством состояний. Доступные наблюде-
ния являются косвенными и содержат винеровские процессы, интенсив-
ности которых различны и зависят от скрытого состояния. Оцениванию
подлежат как матрица интенсивностей переходов марковского состояния,
так и параметры сноса и диффузии наблюдений. Для идентификации
предложен итеративный алгоритм, основанный на сглаживании состоя-
ния системы по наблюдениям на фиксированном интервале времени. За-
тем по данным оценкам восстанавливаются параметры. В работе детально
описаны все численные схемы оценивания состояния и идентификации па-
раметров. Приведен комплекс иллюстративных численных примеров, де-
монстрирующих высокое качество предлагаемых оценок идентификации.
Ключевые слова: скрытая марковская модель, мультипликативные шумы
в наблюдениях, сглаживание на фиксированном интервале наблюдения,
L1-оптимальная оценка, ЕМ-алгоритм.
DOI: 10.31857/S0005231022110058, EDN: KEKCHY
1. Введение
Проблемам идентификации параметров систем наблюдения, состояния ко-
торых описываются марковскими процессами с конечным множеством воз-
можных состояний, скоро исполнится 60 лет [3, 4]. Несмотря на возраст, тео-
ретические решения и алгоритмы их реализации [5-7] не теряют своей акту-
альности из-за своей востребованности для решения широкого спектра при-
кладных задач системного анализа. Другой причиной неослабевающего вни-
мания к проблемам идентификации является постоянное расширение клас-
сов систем наблюдения и моделей доступной измерительной информации.
1 Работа выполнена с использованием инфраструктуры Центра коллективного пользо-
вания “Высокопроизводительные вычисления и большие данные” (ЦКП “Информатика”)
ФИЦ ИУ РАН, Москва.
121
К настоящему времени существуют оценки параметров марковских цепей по
наблюдениям с аддитивными и мультипликативными шумами [8], а также
марковских скачкообразных процессов (МСП) по непрерывным косвенным
наблюдениям в присутствии аддитивных винеровских процессов [9-11].
Целью данной статьи является разработка нового алгоритма идентифика-
ции параметров скрытых марковских моделей (СММ) с непрерывным време-
нем по наблюдениям, шумы в которых зависят от скрытого состояния. Обыч-
но такие шумы называют мультипликативными. Задачи оценивания состоя-
ний и параметров систем по наблюдениям такого типа исследуются доста-
точно редко из-за известных теоретических сложностей [12, 13]. Корректная
постановка и формальное решение задачи оптимальной фильтрации состоя-
ний МСП по диффузионным наблюдениям с мультипликативными шумами
совместно с реализующим его комплексом численных методов представлены
в [1, 2]. Данная статья является естественным продолжением этих исследо-
ваний.
Работа организована следующим образом. Раздел 2 содержит описание ис-
следуемой системы наблюдения и постановку задачи идентификации ее па-
раметров. Раздел включает сравнение различных СММ, для которых задача
идентификации решалась с помощью ЕМ-алгоритма. В разделе также пред-
ставлены доводы в пользу предлагаемого алгоритма идентификации. Они
основываются на возможности построения для исследуемых СММ высоко-
точных оценок сглаживания на фиксированном интервале для скрытого со-
стояния в случае выполнения некоторых необременительных условий иден-
тифицируемости. В разделе 3 представлен численный алгоритм двухфиль-
трового сглаживания, позволяющий получить искомую сглаженную оценку
в виде некоторой комбинации оценок фильтрации состояния МСП в прямом
и обратном времени.
Раздел 4 посвящен алгоритмам фильтрации состояний МСП в прямом
и обратном времени по диффузионным наблюдениям, предварительно дис-
кретизованным по времени. В контексте работы численные алгоритмы оце-
нивания состояния МСП называются устойчивыми, если они гарантируют
доставляемым оценкам выполнение условий неотрицательности компонент
и нормировки. Например, численный алгоритм фильтрации, основанный на
схеме Эйлера-Маруямы решения стохастической дифференциальной систе-
мы (СДС), описывающей фильтр Вонэма, не обеспечивает выполнения этих
условий: как только они нарушаются, вычисленные по данной схеме оценки
“взрываются”. Именно в контексте этого явления предложенные алгоритмы
названы устойчивыми.
Вычисление сглаженных оценок состояния представляет собой E-шаг в
EM-процедуре. М-шаг и вся процедура идентификации описаны в разделе 5.
В нем представлены формулы пересчета L2-оптимальных оценок сглажи-
вания в L1-оптимальные, а также формулы вычисления функционалов от
траекторий наблюдений и оценок МСП, на основании которых собственно и
122
вычисляются оценки параметров СММ. Предложенные в работе алгоритмы
оценивания состояния МСП и идентификации параметров СММ названы эф-
фективными в том смысле, что они не являются сеточными. При решении
задач оценивания состояния МСП это означает, что алгоритмы не требуют
решения стохастических дифференциальных уравнений в частных производ-
ных типа Закаи или Кушнера-Стратоновича. При решении задачи иденти-
фикации это означает, что алгоритм не привлекает аппарат байесовского оце-
нивания и описания оцениваемых параметров с помощью их вероятностного
распределения. С вычислительной точки зрения это означает, что эффек-
тивные алгоритмы используют радикально меньше оперативной памяти и
требуют меньше вычислений для своей реализации.
Раздел 6 содержит результаты комплекса иллюстративных вычислитель-
ных экспериментов. Проведен численный анализ качества оценок фильтра-
ции в прямом и обратном времени состояния МСП в сравнении с оценками
сглаживания на фиксированном интервале наблюдения. Сравнение проведе-
но для случая известных параметров СММ. Представлены результаты оцени-
вания параметров СММ, выполненного с помощью предложенного алгоритма
идентификации. Исследовано качество последующей фильтрации скрытого
состояния МСП с использованием идентифицированных параметров в срав-
нении с “идеальным вариантом”: фильтрацией состояний при точно извест-
ных параметрах системы наблюдения. Раздел 7 содержит заключительные
замечания.
2. Постановка задачи
На триплете с фильтрацией (Ω, F, P, {F}t∈[0,T]) рассматривается СММ
∫t
(1)
Xt = X0 + Λ⊤Xsds + MXt
,
t ∈ [0,T],
0
∫tr
∫
tr
∑
1
(2)
Yr = fXsds+
n dWs, r ∈ {1, . . . , R}, tr
= rδ, T = Rδ,
n=1
tr-1
tr-1
где
• Xt = col(X1t ,...,XNt) ∈ SN
ненаблюдаемое состояние, являющееся
однородным МСП с конечным множеством состояний SN ≜ {e1, . . . , eN }
(SN
множество единичных векторов евклидова пространства RN ),
матрицей интенсивностей переходов (МИП) Λ и начальным распределе-
нием π = col (π1, . . . , πN ); процесс MXt является Ft-согласованным мар-
тингалом,
• Yr = col(Y1r,...,YMr) ∈ RM диффузионные наблюдения
∫t
∫
t
∑
1
(3)
Yt = fXsds +
n dWs,
n=1
0
0
123
M
дискретизованные по времени с шагом δ; Wt = col (W1
t
,...,WMt)∈R
является Ft-согласованным стандартным винеровским процессом, ха-
рактеризующим шумы в наблюдениях, M × N-мерная матрица f и на-
бор M × M-мерных матриц {gn}n=1,N определяют снос и интенсивность
шумов при условии Xt = en.
Ниже в изложении неубывающее семейство σ-подалгебр, порожденных
наблюдениями Y, полученными до момента времени tr, обозначено Yr ≜
≜ {Yq : q = 1, r}, Y0 ≜ {∅, Ω}.
Для системы наблюдения (1)-(2) предполагаются выполненными следую-
щие условия.
1. Триплет с фильтрацией (Ω, F, P, {F}t∈[0,T]) является пространством
Винера-Пуассона [15].
2. Все параметры СММ Λ, f и {gn}n=1,N являются неизвестными неслу-
чайными матрицами подходящей размерности.
3. Матрица Λ удовлетворяет условию min λij > 0, а также обычному тож-
i,j: i=j
∑
деству МИП:j λij ≡ 0.
4. Шумы в наблюдениях Y равномерно невырождены [16], т.е. min
gn >
1≤n≤N
> αI > 0 для некоторого α > 0; здесь и далее I единичная матрица подхо-
дящей размерности.
5. Набор матриц интенсивностей шумов {gn}n=1,N удовлетворяет условию
идентифицируемости [14], заключающемуся в том, что все gn различны.
Задача идентификации СММ заключается в построении оценок парамет-
ров Λ, f и {gn}n=1,N по имеющимся наблюдениям {Y1, . . . , YR}.
Поставленная задача представляет собой аппроксимацию аналогичной за-
дачи идентификации по исходным диффузионным наблюдениям (1), (3).
В [9, 10] исследовалась схожая проблема. Наблюдения были скалярными с
аддитивными винеровскими процессами (т.е. gn ≡ g = I). Авторы представи-
ли процедуру совместной фильтрации состояния МСП и идентификации па-
раметров, основанной на применении EM-алгоритма. Собственно процедура
идентификации параметров требовала оценки числа скачков МСП ei → ej
(i = j)
∫t
(4)
Ni,jt = Xis-dXjs,
0
а также суммарного времени пребывания МСП в различных состояниях ei
∫t
(5)
Oit = Xis
ds, i = 1, N .
0
В монографии [8] был исследован аналог системы (1), (3) с дискретным
временем. В качестве доступных наблюдений выступал векторный процесс
124
с мультипликативным шумом. Авторы модифицировали ЕМ-алгоритм, ис-
пользуя в нем не оценки фильтрации функционалов {Ni,jt }, {Oit}, а их бо-
лее точные аналоги, полученные сглаживанием на фиксированном интервале
наблюдений, а также оценки дополнительных функционалов т.н. “уровневых
сумм” (level sums):
∫t
(6)
Qi,qt = Xisq(Ys)dYs,
0
где q = q(y) некоторая детерминированная функция. Статья [11] была по-
священа алгоритмам численной реализации решения задачи идентификации
параметров СММ с дискретным временем по скалярным наблюдениям с ад-
дитивными шумами неизвестной интенсивности (gn ≡ g неизвестный ска-
ляр). Идентификация в этом случае также проводилась с использованием
оценок функционалов {Ni,jt }, {Oit} и {Qi,qt}, вычисленных на фиксированном
интервале наблюдений.
В [14] представлено решение задачи оптимальной фильтрации состояния
МСП по векторным диффузионным наблюдениям с мультипликативными
шумами. Предложено некоторое преобразование, разбивающее исходные на-
блюдения на совокупность диффузионных процессов с единичной диффузи-
ей, а также набор считающих процессов и случайных векторов, доступных в
неслучайные моменты времени. Аналитическое решение задачи фильтрации
представлено в виде решения некоторой дискретно-непрерывной нелинейной
СДС с непрерывными и считающими процессами в правой части. В статье
показано, что выполнение условия идентифицируемости 5) достаточно для
точного восстановления состояния МСП по имеющимся зашумленным на-
блюдениям.
К сожалению, решение указанной СДС не удается реализовать численно
с помощью известных классических методов [17] из-за того, что упомянутое
преобразование наблюдений представляет собой результат двойного предель-
ного перехода, примененного к исходным наблюдениям. Чтобы избежать чис-
ленной реализации данной операции в [2] было предложено перейти к филь-
трации по наблюдениям, предварительно дискретизованным по времени. Был
представлен комплекс соответствующих численных алгоритмов, а также ха-
рактеристики точности соответствующих оценок. Следует отметить, что оце-
ниванию в [2] подвергалось только само состояние МСП Xt, а не процессы
{Ni,jt}, {Oit} и {Qi,qt}, участвующие в процедуре идентификации. Идея пред-
лагаемой статьи заключается в том, чтобы строить оценки этих процессов не
непосредственно путем обработки дискретизованных наблюдений, а на осно-
ве полученных оптимальных оценок сглаживания состояния Xt.
В статье используются следующие обозначения:
• 1
вектор-строка подходящей размерности, состоящая из единиц,
• IA(x) индикаторная функция множества A,
• ∥α∥2K ≜ α⊤Kα,
125
• NXr случайное число скачков состояния Xt, произошедших на интер-
вале времени [tr-1, tr],
∫ tr
• τr = col(τ1r,...,τNr) ≜
Xsds случайный вектор, компоненты τnr
tr-1
которого равны времени пребывания процесса X в каждом из возможных
состояний en на интервале [tr-1, tr],{
}
∑
N
• D ≜ u = col(u1,...,uN) : un ≥ 0,
un = h
(N - 1)-мерный сим-
n=1
плекс в пространстве RN ; D является носителем распределения векто-
ра τr{
}
∑
N
• Π ≜ π = col(π1,...,πN) : πn ≥ 0,
πn = 1
“вероятностный сим-
n=1
плекс”, содержащий возможные значения начального распределения π,
• ρr,ℓ(du)
условное распределение вектора Xℓtr τr при условии Xtr-1 =
= ek, т.е. для любого множества G ∈ B(RN) верно равенство
{
}
∫
E IG(τr)Xℓ
|Xtr-1 = ek
= ρk,ℓr(du),
tr
G
• ρr,ℓ,q(du)
условное распределение вектора Xℓtr I{q}(NXr )τr при условии
Xtr-1 = ek, т.е. для любого множества G ∈ B(RN) верно равенство
∫
{
}
E IG(τr)I{q}(NXr)Xℓ
|Xtr-1 = ek
= ρk,ℓ,qr(du),
tr
G
• ̺r,ℓ(du)
условное распределение вектора Xℓtr τr+1 при условии
Xtr+1 = ek, т.е. для любого множества G ∈ B(RN) верно равенство
{
}
∫
E IG(τr+1)Xℓ
|Xtr+1 = ek
=
̺k,ℓr(du),
tr
G
• ̺r,ℓ,q(du)
условное распределение вектора Xℓtr I{q}(NXr+1)τr+1 при усло-
вии Xtr+1 = ek, т.е. для любого множества G ∈ B(RN ) верно равенство
{
}
∫
E IG(τr+1)I{q}(NXr+1)Xℓ
|Xtr+1 = ek
=
̺k,ℓ,qr(du),
tr
G
{
}
1
• N (y,m,K) ≜ (2π)-M/2 det-1/2 K exp
-
∥y - m)∥2
M -мерная
K-1
2
гауссовская плотность со средним m и невырожденной ковариационной
матрицей K,
(
)
• ξ ≜ vec(Λ,f,{gn}1,N)
N (N - 1) + NM + NM2
-мерный вектор оцени-
ваемых параметров СММ,
• Yt ≜ σ{Ys, 0 ≤ s ≤ t}
естественный поток σ-алгебр, порожденный
непрерывными наблюдениями Ys, полученными до момента времени t
включительно.
126
3. Вспомогательная задача: сглаживание
на фиксированном интервале наблюдения
Предлагаемый алгоритм идентификации параметров СММ основан на
Xs
итеративном вычислении оценок {Xsr}r=1,R:
≜ E {Xtr|YR} сглаживания
r
на фиксированном интервале наблюдения [0, T ]. Для эффективной реализа-
ции этой процедуры предлагается использовать двухфильтровую процедуру
сглаживания [18-20].
Во-первых, представим алгоритм вычисления оптимальной оценки филь-
трации в прямом времениXr ≜ E {Xtr |Yr}.
Для этого введем в рассмотрение следующие положительные случайные
числа и матрицы, составленные из них:
∫
∑
(7)
θkjr ≜ N Yr,fu,
upgp ρk,jr(du),
θr ≜ ∥θkjr∥k,j=1,N.
p=1
D
Предложение 1. Условное математическое ожидание (УМО)Xr вы-
числяется по рекуррентной формуле
X0
(8)
Xr = (1θ⊤r Xr-1)-1θ⊤r Xr-1, r > 0,
= π.
Доказательство предложения 1 вполне аналогично доказательству лем-
мы 2 в [1].
Во-вторых, предложим мартингальное представление МСП Xt в обратном
времени, а также формулы вычисления оптимальной оценки фильтрации со-
стояния МСП в обратном времени.
На исходном вероятностном пространстве (Ω, F, P) рассмотрим
• поток σ-алгебр {Frt}t∈[0,T] в обратном времени: Frt ≜ σ{Xs, YT -Ys : t ≤
≤ s ≤ T};
• набор дискретизованных наблюдений, Ybr ≜ σ{Yq : r < q ≤ R}; YbR ≜
≜ {∅, Ω}, полученных на интервале времени (tr, T ].
Благодаря условию 3) компоненты распределения МСП π(t) = E {Xt},
являющегося единственным решением системы уравнений Колмогорова
∫t
π(t) = π +
Λ⊤π(s)ds, строго положительны πn(t) > 0 для любых n = 1,N и
0
t > 0 [16]. Поэтому можно корректно определить матричнозначную функцию
-1
-1
(9)
Γ(t) ≜
diag π(t)Λ⊤diag π(t) -
diag π(t)diag (Λ⊤
π(t)),
являющуюся МИП процесса Xt в обратном времени.
Предложение 2. МСП Xt (1) является единственным сильным реше-
нием следующей стохастической системы в обратном времени
T
∫T
∫
(10)
Xt = XT + Γ⊤(s)Xsds + MXt - MXT - (Γ(s) + Λ)⊤ Xsds.
t
t
127
Процесс
∫T
MbXt ≜ MXt - MXT - (Γ(s) + Λ)⊤ Xsds
t
представляет собой Frt-согласованный квадратично интегрируемый мар-
тингал:
{
}
E MbXt|Fr
= MbXs P - п.н. для любых 0 ≤ t ≤ s ≤ T.
s
Доказательство предложения 2 приведено в [19, 21].
Для вычисления оценки фильтрации в обратном времени по аналогии с
прямым временем определим следующие положительные случайные величи-
ны и матрицы из них:
∫
∑
(11)
ϑkjr ≜ N Yr+1,fu,
upgp ̺k,jr(du),
ϑr ≜ ∥ϑkjr∥k,j=1,N.
p=1
D
{
}
Xb
Можно показать, что оценка фильтрации
r
≜E
Xtr |Ybr
состояния
МСП в обратном времени может быть вычислена с помощью рекуррентного
алгоритма аналога (8)
Xb
Xb
(12)
r
= (1ϑ⊤r Xbr+1)-1ϑ⊤r Xr+1, r < R,
R
= π(T).
В-третьих, оптимальная оценка сглаживания на фиксированном интер-
вале наблюдения может быть получена как симметричное преобразование
оценок фильтрации в прямом и обратном времени.
Xs
П р е д л о ж е н и е 3. Оптимальная оценка сглаживания
r
=
= col ( X1sr, . . . , XNsr) = E {Xtr |YR}, r = 0, R поэлементно определяется фор-
мулой
Xns
Xns
r
(13)
=
,
n = 1,N,
r
∑N
Xjs
j=1
r
где ненормированная оценкаXsr ≜ col ( X1sr, . . . , XNsr) является функцией оце-
нок фильтрации в прямомXr и обратномXbr времени, а также априорного
распределения π(tr):
Xn
Xnb
Xns
r
r
(14)
=
,
n = 1,N, r = 1,R.
r
πn(tr)
Доказательство предложения 3 аналогично доказательству теоремы 4
в [20].
128
4. Численный алгоритм решения задачи фильтрации
Ни условное распределение ρk,ℓ в прямом времени, ни его аналог ̺k,ℓ в
обратном времени не являются абсолютно непрерывными по мере Лебега,
поэтому вычисление интегралов (7) и (11) является нетривиальной задачей.
По формуле полной вероятности
∫
∫
∑
∑
∑
θkjr ≜ N Yr,fu,
upgpρk,jr(du) =
NYr,fu, upgpρk,j,qr(du).
p=1
p=1
D
q=0 D
Явный вид отдельных слагаемых ρk,ℓ,q представлен в [2] для q = 0, 1, 2, об-
щий же вид может быть выведен также с использованием формулы полной
вероятности. Было показано, что в этом нет необходимости: при достаточно
малом шаге δ бесконечная сумма в последней формуле хорошо аппрокси-
мируется первыми двумя слагаемыми (q = 0 и 1). В этом случае оценкаXr
приближается аналитической аппроксимацией порядка 1 :
(15)
Xr = (1κrXr-1)-1κrXr-1, r > 0,
X0
= π,
где
∫
∑
∑
(16)
κkjr ≜
NYr,fu, upgp ρk,j,qr(du),
κr ≜ ∥κkjr∥k,j=1,N.
q=0D
p=1
Данное приближение учитывает не более одного скачка МСП на интервале
дискретизации [tr-1, tr]. Если λ ≜ max
|λnn|, и шаг δ так мал, что λδ < 1, то
1≤n≤N
(см. [2])
∑
2
(λδ)k
(17)
C ≜e-λδ
< 1,
(λδ)2
k!
k=2
и точность аппроксимации характеризуется неравенством
(
)r
{
}
(λδ)2
E
X
r -Xr
≤2-2
1-C
∼ λ2δtr при δ → 0.
1
2
Элементы κrj имеют следующий явный вид:
∫
δ
(18)
κkjr = δkjeλjjδN(Yr,δfj,δgj) + (1 - δkj)λkjeλjjδ Vkj(Yr
, u)du,
0
где δkj
символ Кронекера, а
(
)
(19)
V kj(y,u) ≜ e(λkk-λjj)uN y,ufk + (δ - u)fj
, ugk + (δ - u)gj
129
Интеграл в (18), а вместе с ним и вся аппроксимация Xr не могут быть
вычислены аналитически, поэтому их приходится находить численно, вно-
ся дополнительную ошибку. Для этого предлагается использовать составной
метод средних прямоугольников с малым шагом δ1+α, α > 0:
(20) κkjr ≈ ψkjr ≜ δkj eλjj δN (Yr, δfj , δgj ) +
[δ-α]∑
(
(
))
1
+ (1 - δkj )λkjδ1+α
Vkj Yr,δ1+α i-
2
i=1
Используя обозначения ψr ≜ ∥ψrj ∥k,j=1,N , можно представить численную ап-
проксимацию порядка min(α,1), основанную на составной схеме средних пря-
моугольников
(21)
Xr = (1ψ⊤r Xr-1)-1ψ⊤r Xr-1, r > 0,
X0
= π.
Суммарная ошибка аппроксимацииXr характеризуется следующим нера-
венством [2]:
{
}
E
X
r -Xr
≤ C1(δ + C2δα)tr
1
для некоторых положительных констант C1 и C2. Из этого неравенства следу-
ет, что рациональным с точки зрения точности выбором параметра α будет 1.
Все рассуждения выше относились к аппроксимации оценки фильтрации
в прямом времени. Данный подход может быть применен и при вычислении
оценки фильтрации в обратном времени. Как и в случае прямого течения
времени предполагается, что на интервале временной дискретизации состоя-
ние МСП может совершить не более одного скачка. При этом приходится
учитывать тот факт, что МСП Xt в обратном времени в общем случае не
обладает свойством однородности. Аналог формулы (18) принимает вид
t
∫
(22) ζkjr = δkj exp
γkk(u)du N(Yr+1,δfk,δgk) +
tr
∫δ
+ (1 - δkj) Ukjr(Yr+1, u)du,
0
где
∫
u
∫
(23) Ukjr(y, u) ≜ γkj(u) exp γkk(s)ds +
γjj(s)ds ×
tr
u
(
)
× N y,ufk + (δ - u)fj
, ugk + (δ - u)gj
130
Формулы (22) и (23) содержат интегралы, которые вновь приближенно вы-
числяются по составной схеме средних прямоугольников
(
(tr +tr+1))
(24) ζkjr ≈ φkj
= δkj exp δγkk
+
r
2
[δ-α]∑
(
(
))
1
+ (1 - δkj)δ1+α
Ukj Yr+1,δ1+α i-
,
2
i=1
где
(25)
Ukjr(y,u) ≜
(
(u+tr)
(u+tr+1))
≜ γkj(u)exp (u - tr)γkk
+ (tr+1 - u)γjj
×
2
2
(
)
× N y,ufk + (δ - u)fj, ugk + (δ - u)gj
Используя матрицы φr ≜ ∥φrj ∥k,j=1,N , можно представить численную ап-
проксимацию порядка min(α, 1), основанную на составной схеме средних пря-
моугольников для фильтра в обратном времени
Xb
Xb
(26)
= (1φ⊤r Xbr+1)-1φ⊤r Xbr+1, r < R,
= π(T).
r
R
Таким образом, искомая оценкаXsr сглаживания состояния МСП Xtr на фик-
сированном интервале наблюдений вычисляется по формулам (13), (14), в
которых оценки фильтрацииX иXb заменены их аппроксимациямиX (21)
и Xb (26).
5. Алгоритм идентификации параметров
скрытой марковской модели
Перед представлением алгоритма идентификации параметров СММ при-
ведем некоторые наводящие соображения.
Рассмотрим СММ с непрерывным временем (1), (3), в которой оба процес-
са Xt и Yt являются наблюдаемыми. По усиленному закону больших чисел
для МСП [22] и процессов восстановления [23] имеет место следующая схо-
димость:
NijT
(27)
→λij
при T → ∞ P - п.н. для любых i, j = 1, N : i = j,
Oi
T
1
(28)
Qi,1T → fei
при T → ∞ P - п.н. для любых i = 1, N .
Oi
T
131
Помимо этого
T
(
∫
∫
1
(
)
(29)
Qi,1
Qi,1T
- Qi,1sd
Qi,1s
⊤ - dQi,1s(Qi,1s)⊤=gi
T
Oi
T
0
0
для любых i = 1, N на множестве {ω ∈ ω : OiT (ω) > 0}. В (27), (28) и (29)
• процессы Nijt and Oit определяются формулами (4) и (5),
• уровневая сумма Qi,1t является частным случаем (6):
∫t
(30)
Qi,1t = XisdYs.
0
Формулы (27) и (28) могут быть интерпретированы как вариант метода
моментов [24]. Если Xt ненаблюдаемое состояние МСП, но выполняется
условие идентифицируемости 5), то Xt может быть восстановлен точно по
наблюдениям {Yt}:
(31)
Xt ≜ E {Xt|Yt+} = Xt
P - п.н. для любого
0≤t<T.
Это означает, что в условиях 5) оценка Xt также позволяет идентифици-
ровать параметры СММ ξ, если использовать ее в формулах (4), (5) и (30)
вместо истинного значения Xt. Однако точное вычисление Xt невозможно:
оценка является решением некоторой дискретно-непрерывной СДС, помимо
этого, ее вычисление требует знания истинных значений параметров ξ иден-
тифицируемой СММ.
Для преодоления этих сложностей и построения субоптимального алго-
ритма идентификации предлагается сделать несколько шагов.
Во-первых, согласно [25], при выполнении необременительных условий
имеет место непрерывная зависимость решений СДС по параметру, т.е. если
последовательность параметров {ξu}u∈N сходится к ξ при u → ∞, то после-
→X(ξ) при u → ∞.
Это означает, что в случае достаточной близости используемых в алгорит-
ме оценивания параметров ξu к истинным значениям ξ качество получаемой
оценки X(ξu) будет близко к качеству оптимальной оценки условному сред-
нему X(ξ) относительно имеющихся наблюдений.
Во-вторых, в случае известных параметров ξ и вложенной последова-
тельности разбиений {tr}r=1,R по теореме Леви имеет место сходимость [16]
Xr → Xtr P- п.н. при R → ∞. Это означает, что при выполнении условия 5),
оценка оптимальной фильтрацииXr, вычисленная по дискретизованным на-
блюдениям Y, будет достаточно близка к истинному состоянию Xtr , и оценка
оптимального сглаживанияXsr тем более будет обладать этим свойством.
В-третьих, траектории состояния МСП Xt и их оценок Xt по диффузи-
онным наблюдениям Yt (3) являются кусочно-постоянными функциями со
132
значениями в SN . В отличие от них, значение УМО
Xr, вычисленное по
дискретизованным наблюдениям Y (2), принадлежат “вероятностному сим-
плексу” Π. Эту проблему легко решить, заменяя
Xr на оценки максимума
апостериорной вероятности Xr:
(
)
Xr
(32)
Xr = argmax e⊤
n
n
Заметим при этом, что условное среднееXr является L2-оптимальной оцен-
кой, в то время как
Xr L1-оптимальная оценка.
В-четвертых, формулы (27)-(29), в которых истинные значения NijR , OiR
и Qi,1R заменены их оценками
∑
(33)
Ni,jR = δ
Xisr-1
Xjsr
Xjsr-1
),
r=1
∑
Oi
(34)
R
=δ
Xisr-1,
r=1
∑
Qi,1
(35)
=
Xisr-1Yr,
R
r=1
позволяют построить следующие оценки параметров СММ:
i,j
NR
(36)
λij =
,
i = j,
Oi
R∑
(37)
λii = -
λij ,
j:j=i
1
Qi,1
(38)
fei =
,
R
Oi
R
∑
1
(39)
gi =
Xisr(Yr -
fei)(Yr -
fei)⊤.
Oi
R r=1
Пересчет параметров СММ может выполняться в цикле: сначала вычисля-
ются оценки состояния МСП, а затем по этим оценкам происходит уточнение
параметров СММ. Выход из этой процедуры может быть выполнен по пре-
вышении некоторого максимального числа итераций Niter, но возможно и
другое условие. Пусть ξu и ξu+1 оценки параметров СММ, вычисленные
на u-й и (u + 1)-й итерациях соответственно. Условием остановки итерацион-
ного процесса может быть выбрано выполнение неравенства
∥ξu+1 - ξu∥
(40)
≤εξ,
∥ξu∥
133
т.е. падение относительного изменения вектора параметров ниже некоторого
фиксированного порога εξ.
В процессе идентификации также следует обеспечивать выполнение усло-
вия 3) строгой положительности внедиагональных элементов оценки МИПΛ.
Для этого следует зафиксировать некоторый “барьерный” параметр ελ, и вме-
сто оценкиλij(u + 1) (36) на (u + 1)-м шаге использовать его модификацию
(
)
λij
(41)
ε
(u + 1) = max ελ|λii(u)|,λij (u + 1)
Относительно ограничительное условие 3) в данной статье было использо-
вано для того, чтобы продемонстрировать возможность использования “ба-
рьеров” для учета различной априорной информации о допустимых обла-
стях оцениваемых параметров. Вообще говоря, 3) может быть заменено ме-
нее ограничительным условием эргодичности МСП Xt, что достаточно для
идентификации МИП Λ.
Суммируя все вышесказанное, алгоритм идентификации параметров
СММ имеет следующий вид.
Шаг 1. Инициализация начальных значений параметров СММξ0 и цикла
идентификации u := 0.
Шаг 2. Начало цикла u := u + 1.
Шаг 3. Вычисление оценок фильтрации в прямом времени {Xr(ξu-1)}r=1,R
по формулам (20) и (21) с использованием оценок параметровξu-1,
вычисленных на предыдущем шаге цикла.
Шаг 4. Вычисление оценок фильтрации в обратном времени {Xbr(ξu-1)}r=1,R
по формулам (24) и (26) с использованием оценок параметровξu-1,
вычисленных на предыдущем шаге цикла.
Шаг 5. Вычисление оценок сглаживания на фиксированном интервале
{Xsr(ξu-1)}r=1,R по формулам (13) и (14).
Шаг 6. Пересчет оценок {Xsr(ξu-1)}r=1,R в оценки максимума апостериорной
вероятности
Xr(ξu-1)}r=1,R по формуле (32).
Oi
Qi,1
Шаг 7. Вычисление оценок
Ni,jR(ξu-1),
(ξu-1) и
(ξu-1) по формулам
R
R
(33), (34) и (35).
Шаг 8. Вычисление оценокλuj
fu и gu по формулам (36), (37), (38) и (39).
Шаг 9. Если u < NIter и∥ξu+1-ξu∥∥ξ
> εξ, то перейти к Шагу 2, в противном
u∥
случае закончить процесс идентификации.
Для одной итерации предложенного алгоритма идентификации можно теоре-
тически оценить зависимость трудоемкости ее выполнения от объема имею-
щихся наблюдений и параметров СММ:
• линейная зависимость от числа обрабатываемых измерений (длины об-
щего отрезка наблюдения [0, T ], частоты дискретизации δ-1),
• степенная зависимость от размерности N скрытого состояния с показа-
телем, больше 2,
134
• степенная зависимость от размерности M размерности наблюдаемого
процесса с показателем, больше 2.
В настоящий момент времени не существует формальных утверждений,
гарантирующих сходимость предложенного алгоритма идентификации, одна-
ко высокая точность численных алгоритмов фильтрации состояния СММ по
наблюдениям с мультипликативными шумами, а также набросок алгоритма
идентификации параметров СММ с дискретным временем, представленный
в [8], вселяет надежду на возможность доказательства этой сходимости.
Между предложенной процедурой идентификации и ЕМ-алгоритмом име-
ется следующая связь. Известно, что последний представляет собой итера-
ционное повторение двух шагов. На Е-шаге по всей совокупности наблю-
дений {Yr}r=1,R вычисляются оценки состояния СММ {Xtr }r=1,R, исполь-
зуя оценки неизвестных параметров системы ξn-1, вычисленные на преды-
дущем шаге. Этому шагу соответствуют формулы (33)-(35). На М-шаге по
вновь рассчитанным оценкам состояния пересчитывается условная функция
правдоподобия, для которой затем находится максимум оценка парамет-
ров ξn на текущем шаге. Этому шагу соответствуют формулы (36)-(39). Да-
лее цикл повторяется. Ключевым свойством EM-алгоритма, доказанным для
системы наблюдения (1), (3) в случае аддитивных шумов в наблюдениях,
является его сходимость к локальному максимуму условной функции прав-
доподобия [9, 10]. Так оказалось, что формулы М-шага (36)-(38) совпали с
формулами метода моментов. Однако формула (39) в [9, 10] не использова-
лась: во-первых, задача оценивания интенсивностей шумов наблюдений {gn}
не ставилась, во-вторых, [9, 10] не содержит решения задачи фильтрации
состояния СММ по наблюдениям с мультипликативными шумами. В предло-
женной статье по аналогии с тем, что (36)-(38) формулы метода моментов
для оценивания Λ и f, предлагается использовать формулу (39) как вари-
ант метода моментов для оценивания {gn}. Так что пересчет оценок Λ и f
осуществляется в полном соответствии с М-шагом, а оценивание {gn} осу-
ществляется методом моментов.
6. Численные эксперименты
Для демонстрации качества оценок идентификации был выполнен ком-
плекс численных экспериментов. Для возможности объективного сравнения
все вычисления проводились для СММ с одинаковыми параметрами: N = 3;
M = 1; δ = 0,0002;
-5
4
1
0,3571
[
]
Λ= 5
-10
5
; π = 0,2858
;f=
0
0
0
;
1
4
-5
0,3571
g1 = 0,1; g2 = 0,2; g3 = 0,3.
135
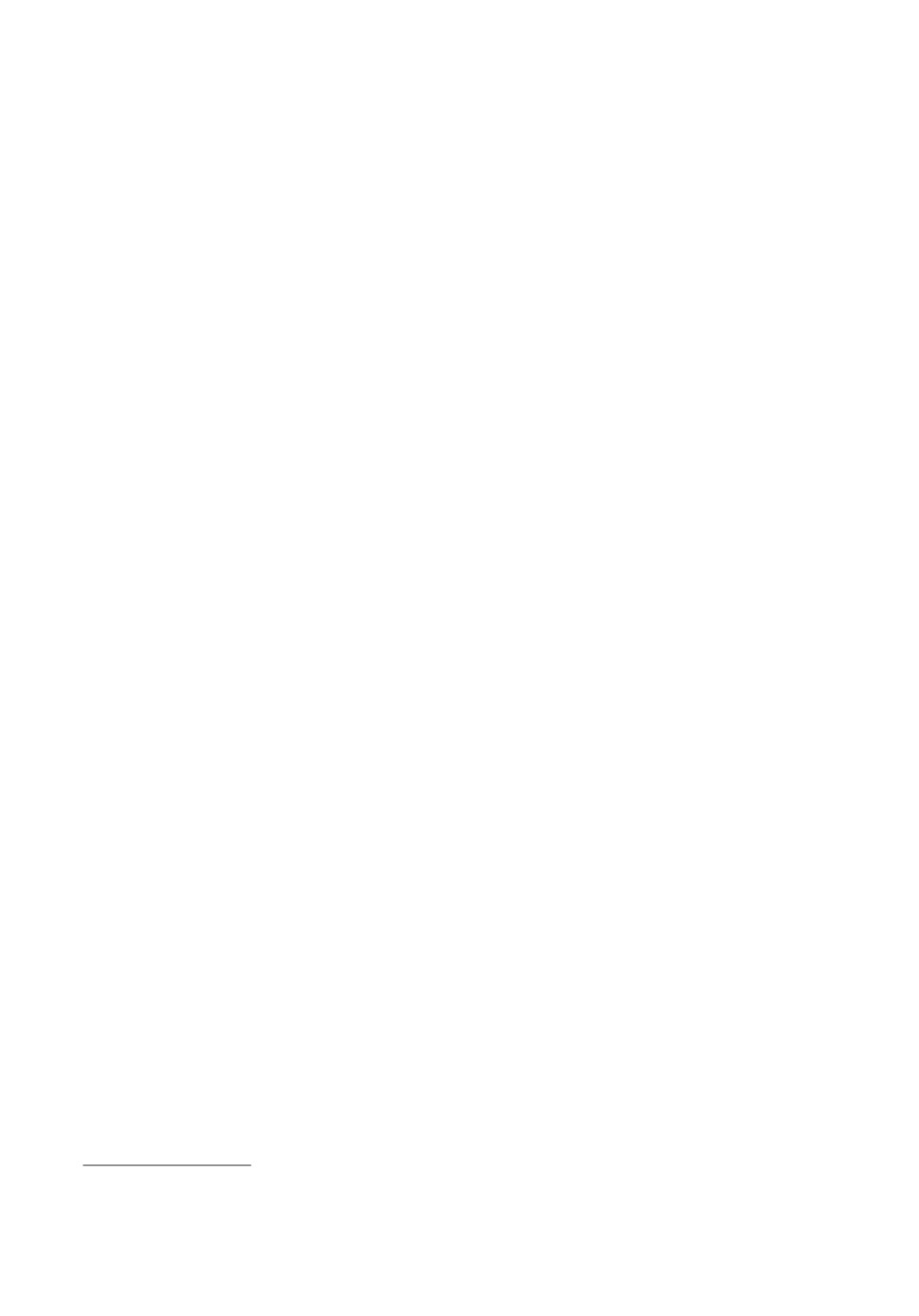
Рис. 1. Доступные наблюдения, компоненты МСП и их оценки.
Начальное распределение было выбрано совпадающим со стационарным, мо-
делирование траекторий выполнялось с шагом 0,00002.
Первая часть экспериментов посвящена сравнению качества оценок филь-
трации и сглаживания на фиксированном интервале при условии, что точные
значения параметров СММ известны.
На рис. 1 представлены результаты решений задач оценивания, выполнен-
ные для исследуемой СММ на отрезке наблюдения [0; 2]:
• наблюдения Yr, доступные на [0; 2],
• точные значения компонентов МСП Xt,
• оценки фильтрацииXt в прямом времени,
• оценки фильтрацииXbt в обратном времени,
• оценки сглаживанияXst на фиксированном интервале наблюдения [0; 2].
Для сравнительного анализа точности оценивания по пучку траекторий
объемом 1000 вычислены выборочные дисперсии ошибок оценок фильтрации
и сглаживания. На рис. 2 представлены:
• выборочная дисперсия Dt ошибок оценок фильтрации в прямом време-
ни,
• выборочная дисперсия Dbt ошибок оценок фильтрации в обратном вре-
мени,
• выборочная дисперсия Dst ошибок оценок сглаживания на фиксирован-
ном интервале наблюдения.
136
Дисперсии ошибок оценок 1-й компоненты
0,10
0,05
0
Дисперсии ошибок оценок 2-й компоненты
0,10
0,05
0
Дисперсии ошибок оценок 3-й компоненты
0,10
0,05
0
0,5
1,0
1,5
t
s
Dt
Dtb
Dt
Рис. 2. Выборочные дисперсии ошибок оценок фильтрации и сглаживания.
По результатам первого численного эксперимента можно сделать следующие
выводы.
1. С визуальной точки зрения доступные наблюдения малопригодны для
оценивания состояния МСП.
2. Нулевой снос в наблюдениях затрудняет процессы оценивания. Тем не
менее интенсивности шумов в наблюдениях при разных состояниях МСП
различны, поэтому в исследуемой системе наблюдения выполнены усло-
вия идентифицируемости 5).
3. В проведенном эксперименте оценки сглаживания обеспечивают высокую
точность. К подобному выводу позволяют прийти следующие заключения.
Как само оцениваемое состояние, так и его оценка лежат в “вероятностном
симплексе” Π, поэтому ошибка оценки имеет негауссовское распределение,
а значит и пользоваться “правилом трех сигм” в данном случае бессмыс-
ленно. Дисперсия каждой компоненты оцениваемого состояния является
индексом статистической неопределенности. Действительно, тривиаль-
ной оценкой компонент являются их математические ожидания, а дис-
персии численно характеризуют меру разброса компонент относительно
своих средних величин тривиальных оценок. Следует отметить, что
математические ожидания строятся только на основе априорной инфор-
мации, без привлечения каких-либо наблюдений. Рассмотрим, например,
1-ю компоненту. Она имеет распределение Бернулли с параметром 0,3571,
а значит дисперсию 0,2296. Сравним эту дисперсию с дисперсией ошиб-
ки оптимальной оценки сглаживания: из рис. 2 можно сделать вывод, что
она колеблется в районе 0,01-0,03 (среднее значение 0,0225), т.е. мень-
137
Таблица
Истинное значение Λ Начальное условие Λ0
Оценка
Λ
−5,0
4,0
1,0
-1,0
0,5
0,5
-4,5455
3,7613
0,7842
5,0
-10,0
5,0
0,5
-1,0
0,5
4,3470
-8,4221
4,0751
1,0
4,0
-5,0
0,5
0,5
-1,0
0,8508
3,3833
-4,2341
Истинное значение f Начальное условие f0
Оценка
f
0,0
0,0
0,0
-1,0
0,0
1,0
-0,02
0,0278
-0,0171
Истинное значение g Начальное условие g0
Оценка g
0,1
0,2
0,3
0,05
0,15
0,4
0,0997
0,1992
0,3003
ше исходного значения дисперсии в 10 раз. Если использовать дисперсию
в качестве показателя неопределенности, то данный эксперимент демон-
стрирует, что статистическая неопределенность снизилась в 10 раз. Соот-
ношение дисперсий других компонент состояния имеет тот же порядок.
Вообще, отношение дисперсии ошибки оценки к дисперсии оцениваемого
сигнала в линейной регрессии достаточно известный показатель RSS
(Residual Sum of Squares).
4. Выборочные дисперсии ошибок сглаживания вдвое меньше дисперсий
ошибок фильтрации в прямом и обратном времени. Это означает, что
использование в процедуре идентификации оценок сглаживания вместо
оценок фильтрации способно принести существенный выигрыш в точно-
сти.
5. Точность оценивания различных состояний зависит не только от пара-
метров оцениваемого СММ, но и характеристик наблюдений. В рассмат-
риваемом примере состояния 1 и 3 оцениваемого МСП “симметричны”:
вероятности пребывания в них и интенсивности переходов в них и из них
одинаковы. Тем не менее выборочная дисперсия оценки 3-го компонента
МСП в 2 раза больше, чем соответствующее значение для 1-го компо-
нента. Это связано с тем, что интенсивность шумов в наблюдениях при
условии Xt = e1 равна 0,1, в то время как соответствующее значение при
условии Xt = e3 равно 0,3.
Вторая часть экспериментов посвящена исследованию качества оценок па-
раметров СММ. Оценивание выполнялось по наблюдениям, полученным на
отрезке времени [0; 1000]. Максимальное число итераций NIter = 15, мини-
мальный порог относительного изменения оценок параметров εξ = 0,005. “Ба-
рьерные” значения, отделяющие оценки внедиагональных элементов λij от
нуля ελ = 0,1.
Приведенная выше таблица содержит истинные значения оцениваемых па-
раметров ξ СММ, начальные условия ξ0 для старта итерационной процедуры
идентификации и окончательные оценкиξ.
В данном эксперименте процесс идентификации закончился после 12 ите-
раций. Эволюция оценок параметров в зависимости от номера итерации Iter
138
Оценки внедиагональных коэффициентов 1-й строки матрицы L
40
20
0
Оценки внедиагональных коэффициентов 2-й строки матрицы L
30
20
10
0
Оценки внедиагональных коэффициентов 3-й строки матрицы L
6
4
2
0
2
4
6
8
10
Iter
Оценка 1-го
Истинное значение
Оценка 2-го
Истинное значение
коэфф.
1-го коэфф.
коэфф.
2-го коэфф.
Рис. 3. Оценки и точные значения внедиагональных элементов МИП Λ.
Оценки 1-го коэффициента строки f
0
-0,5
-1,0
Оценки 2-го коэффициента строки f
0,06
0,04
0,02
0
Оценки 3-го коэффициента строки f
1,0
0,5
0
2
4
6
8
10
Iter
Оценка
Истинное значение
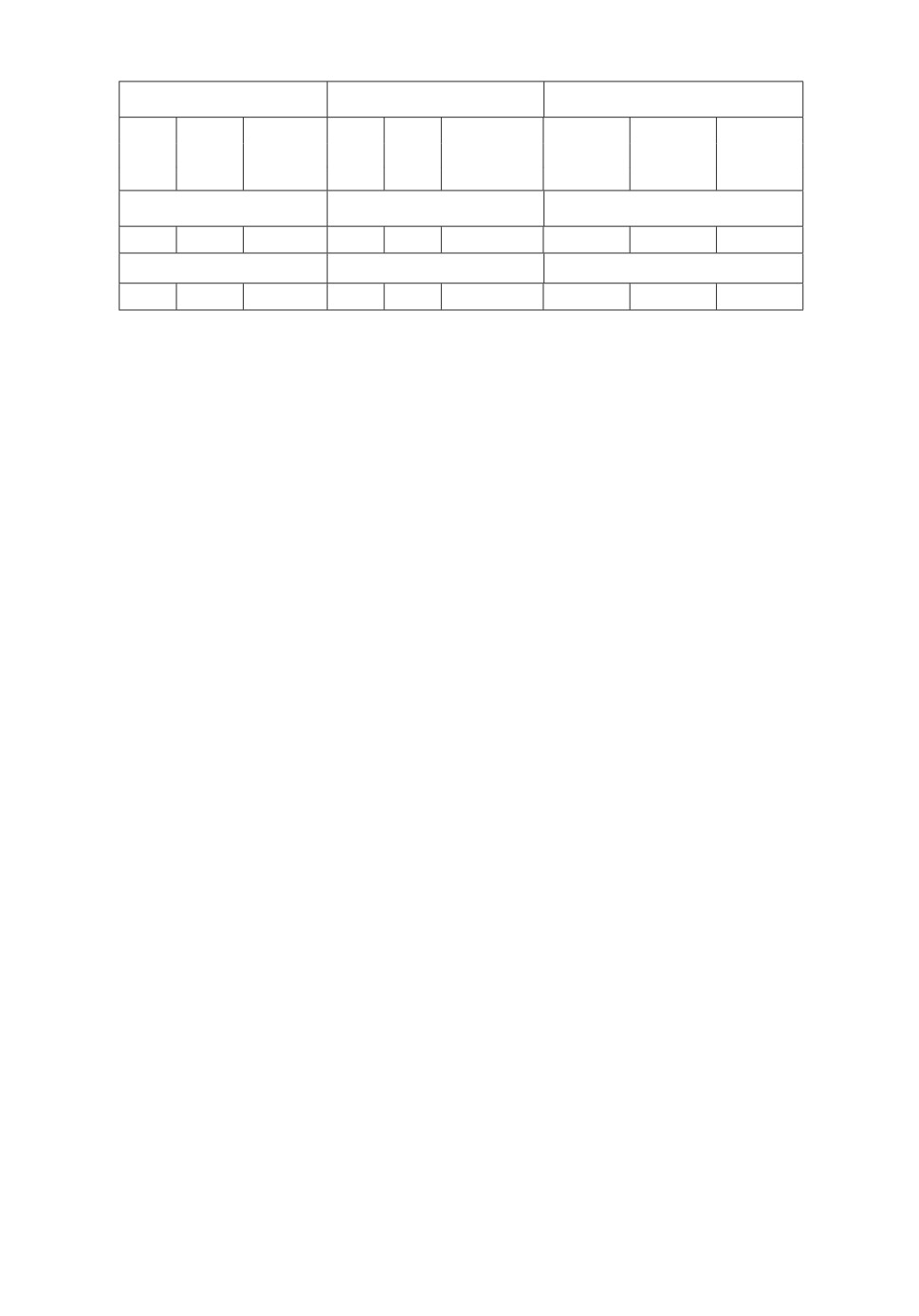
Рис. 4. Оценки и точные значения параметров сноса f.
в сравнении с истинными значениями оцениваемых параметров приведены
на рис. 3 для элементов МИП Λ, на рис. 4 для параметров сноса f, на
рис. 5
для параметров диффузии g.
139
Оценка 1-го коэффициента g
0,10
0,08
0,06
Оценка 2-го коэффициента g
0,20
0,18
0,16
0,14
Оценка 3-го коэффициента g
0,40
0,35
0,30
2
4
6
8
10
Iter
Оценка
Истинное значение
Рис. 5. Оценки и точные значения параметров диффузии g.
По результатам второго численного эксперимента можно сделать следую-
щие выводы:
1. Итерационный процесс идентификации демонстрирует быструю сходи-
мость.
2. В результате идентификации ни один из внедиагональных элементов оцен-
ки МИПΛ не совпадает с “барьерным” значением, что означает, что ба-
рьерные ограничения в полученной оценке неактивны, и оценка совпадает
с некоторым локальным максимумом условной функции правдоподобия.
3. Качество оценок параметров сноса f и диффузии g выше, чем качество
оценивания МИП Λ.
Идентификация параметров СММ не является самоцелью: обычно в при-
кладных задачах полученные значения используются для последующего ре-
шения задач оценивания и/или стохастического управления по неполной ин-
формации. Третья часть экспериментов посвящена сравнению оценок филь-
трации состояния МСП, вычисленной с использованием идентифицирован-
ных параметров, и “эталонных” оценок фильтрации, вычисленных по точным
значениям параметров СММ.
На рис. 6 представлены графики траекторий оценок фильтрации на от-
резке [0; 1], вычисленных по идентифицированным и точным значениям па-
раметров модели.
На рис. 7 приведены графики выборочных дисперсий ошибок фильтрации,
вычисленных по идентифицированным и точным значениям параметров мо-
дели. Дисперсии вычислялись методом Монте-Карло по пучку траекторий
объемом 100 000.
140
Доступные наблюдения
0,02
0
-0,02
Оценки 1-й компоненты
1,0
0,5
0
Оценки 2-й компоненты
1,0
0,5
0
Оценки 3-й компоненты
1,0
0,5
0
0,5
1,0
1,5
t
Xt
X
t
XEt
Рис. 6. Оценки фильтрации состояний МСП Xt, вычисленные по идентифи-
XE
цированным
Xt и точным параметрам
t
СММ.
Дисперсии ошибок оценок 1 -й компоненты
0,023
0,022
0,021
Дисперсии ошибок оценок 2-й компоненты
0,062
0,060
0,058
Дисперсии ошибок оценок 3-й компоненты
0,045
0,044
0,043
0,042
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
t
E
Dt
Dt
Рис. 7. Выборочные дисперсии ошибок фильтрации состояний МСП, вычис-
ленных по идентифицированным Dt и точным DEt параметрам СММ.
По результатам третьего численного эксперимента можно сделать следую-
щие выводы:
1. Оценки фильтрации, вычисленные с помощью идентифицированных зна-
чений параметров СММ, визуально не отличаются от оценок, вычислен-
ных со знанием точных значений параметров.
141
2. Даже при большом объеме пучка траекторий, используемых в методе
Монте-Карло, разница выборочных дисперсий ошибок фильтрации, по-
лученных по идентифицированным и точным параметрам, находится на
уровне статистической погрешности.
7. Заключение
Статья представляет субоптимальный алгоритм идентификации парамет-
ров СММ с непрерывным временем. В качестве скрытого состояния высту-
пает однородный МСП с конечным множеством состояний. Имеющиеся на-
блюдения являются косвенными и содержат мультипликативные шумы.
Предложена итерационная процедура оценивания параметров СММ, род-
ственная ЕМ-алгоритму. Она основана на попеременном решении задач сгла-
живания скрытого состояния и вычислении на основе этих результатов и
имеющихся наблюдений оценок параметров СММ методом моментов.
Алгоритм идентификации сходится за малое число итераций. Проведен-
ные численные примеры демонстрируют высокое качество оценивания мат-
риц сноса f и диффузии g, и приемлемое качество оценивания МИП Λ. Тем не
менее продемонстрированной точности достаточно для последующего успеш-
ного решения задач фильтрации скрытого состояния МСП с использованием
идентифицированных значений параметров.
Несмотря на то что в статье показаны положительные качества алгоритма
и его потенциальные возможности, существует целый ряд направлений, по
которым он может быть модифицирован.
Во-первых, алгоритм обладает свойством “жадности”: он сходится к ло-
кальному максимуму условной функции правдоподобия, ближайшей к на-
чальному условию итерационного процесса. При этом у функции правдоподо-
бия могут существовать другие локальные максимумы с большими значения-
ми. Улучшение качества оценивания возможно с помощью выбора начально-
го условия путем некоторой предобработки имеющихся наблюдений. Другим
способом является параллельный запуск нескольких экземпляров итерацион-
ного процесса, стартующих из различных начальных условий. В этом случае
механизм выбора этих условий также играет существенную роль.
Во-вторых, предложенный алгоритм идентификации не обеспечивает опе-
ративную обработку наблюдений нарастающего объема - это связано с “при-
родой” ЕМ-алгоритма. Дело в том, что СММ включает в себя как наблюдае-
мые, так и скрытые компоненты, поэтому возможно построить только услов-
ную функцию правдоподобия, характеризующую распределение скрытого со-
стояния X[0,T], относительно имеющихся наблюдений YR на всем интервале
наблюдения [0, T ]. Данное условное осреднение автоматически означает сгла-
живание на фиксированном интервале наблюдения, и это решение этой зада-
чи не может быть представлено в рекуррентной форме. Каждое следующее
наблюдение, полученное в момент tr, должно быть обработано для уточне-
ния всей траектории состояния на отрезке [0, tr-1] и оцениванию состояния в
142
новой точке tr. Таким образом, с ростом интервала наблюдения растет и дли-
на траектории скрытого состояния, которая должна быть сглажена по всему
имеющемуся массиву наблюдений. Данное свойство ЕМ-алгоритм демонстри-
рует во всех задачах, в которых он может быть применен для идентификации
параметров СММ: начиная от классического алгоритма Баума-Велча [3, 4],
применяемого для идентификации параметров частично наблюдаемых мар-
ковких цепей, и заканчивая алгоритмами идентификации параметров СММ
с непрерывным временем [8-11]. Представляется перспективной разработка
рекуррентных модификаций алгоритма, позволяющих проводить идентифи-
кацию параметров СММ в реальном масштабе времени по наблюдениям на-
растающего объема.
В-третьих, в текущей версии алгоритма учет доступной априорной инфор-
мации о множестве допустимых значений оцениваемых параметров (на при-
мере условия 3) строгой положительности интенсивностей переходов) реали-
зуется с помощью использования некоторых “барьеров”, препятствующих вы-
ходу оценок из этого множества. Алгоритм может быть улучшен путем более
гибкого подбора значений “барьеров”.
Перечисленные направления исследований представляются интересными
не только с точки зрения эмпирического улучшения работы алгоритма и
повышения его точности, но и в плане поиска теоретического обоснования
свойств алгоритма и его модификаций.
СПИСОК ЛИТЕРАТУРЫ
1. Борисов А. L1-оптимальная фильтрация марковских скачкообразных процес-
сов I // АиТ. 2020. № 11. C. 11-31.
Borisov A. L1-Optimal Filtering of Markov Jump Processes I // Autom. Remote
Control. 2020. V. 81. No. 11. P. 1945-1962.
2. Борисов А. L1-оптимальная фильтрация марковских скачкообразных процессов
II // АиТ. 2020. № 12. C. 24-49.
Borisov A. L1-Optimal Filtering of Markov Jump Processes II // Autom. Remote
Control. 2020. V. 81. No. 12. P. 2160-2180.
3. Baum L., Petrie T. Statistical Inference for Probabilistic Functions of Finite State
Markov Chains // Ann. Math. Statist. 1966. V. 37. No. 6. P. 1554-1563.
4. Baum L., Petrie T., Soules G., Weiss N. Technique Occurring in the Statistical
Analysis of Probabilistic Functions of Markov Chains // Ann. Math. Statist. 1970.
V. 41. No. 1. P. 164-171.
5. Cappé O., Moulines E., Rydén T. Inference In Hidden Markov Models. New
York: Springer, 2005.
6. Rabiner L. A tutorial on hidden Markov models and selected applications in speech
recognition // Proc. IEEE. 1989. V. 77. No. 2. P. 257-286.
7. Ephraim Y., Merhav N. Hidden Markov Processes // IEEE Trans. Inf. Theory.
2002. V. 48. No. 6. P. 1518-1569.
8. Elliott R.J., Moore J.B., Aggoun L. Hidden Markov Models: Estimation and Control.
New York: Springer, 2008.
143
9.
Zeitouni O., Dembo A. Exact filters for the estimation of the number of transitions
of finite-state continuous-time Markov processes // IEEE Trans. Inf. Theory. 1988.
No. 34. P. 890-893.
10.
Dembo A., Zeitouni O. Parameter estimation of partially observed continuous time
stochastic processes via the EM algorithm // Stochast. Proces. Their Appl. 1986.
V. 23. P. 91-113.
11.
James M., Krishnamurthy V., Le Gland F. Time Discretization of Continuous-Time
Filters and Smoothers for HMM Parameter Estimation // IEEE Trans. Autom.
Contr. 1996. V. 42. No. 2. P. 593-605.
12.
Липцер Р., Ширяев А. Теория мартингалов. М.: Физматлит, 1986.
13.
Takeuchi Y., Akashi H. Least-squares state estimation of systems with state-
dependent observation noise // Automatica. 1985. V. 21. No. 3. P. 303-313.
14.
Borisov A., Sokolov I. Optimal Filtering of Markov Jump Processes Given Observa-
tions with State-Dependent Noises: Exact Solution and Stable Numerical Schemes //
Mathematics. 2020. V. 8. No. 4. 506.
15.
Ishikawa Y., Kunita H. Malliavin calculus on the Wiener-Poisson space and its appli-
cation to canonical SDE with jumps // Stochast. Proces. Their Appl. 2006. V. 116.
P. 1743-1769.
16.
Липцер Р.Ш., Ширяев А.Н. Статистика случайных процессов. М.: Наука, 1974.
17.
Platen E., Bruti-Liberati N. Numerical Solution of Stochastic Differential Equations
with Jumps in Finance. Berlin: Springer, 2010.
18.
Badawi F., Lindquist A., Pavon M. A stochastic realization approach to the smooth-
ing problem // IEEE Trans. Autom. Contr. 1979. V. 24. P. 878-888.
19.
Борисов А. Представление марковских скачкообразных процессов в обратном
времени и смежные вопросы. I // АиТ. 2006. № 8. C. 51-76.
Borisov A. Backward representation of Markov jump processes and related problems.
I // Autom. Remote Control. 2006. V. 67. No. 8. P. 1228-1250.
20.
Борисов А. Представление марковских скачкообразных процессов в обратном
времени и смежные вопросы. II // АиТ. 2006. № 9. C. 120-141.
Borisov A. Backward representation of Markov jump processes and related problems.
II // Autom. Remote Control. 2006. V. 67. No. 9. P. 1466-1484.
21.
Elliott R.J. Reverse-Time Markov Processes // IEEE Trans. Inf. Theory. 1986. V. 32.
P. 290-292.
22.
Meyn S., Tweedie R. Markov Chains and Stochastic Stability. Berlin: Springer, 1993.
23.
Боровков А. Теория вероятностей. М.: Физматлит, 1986.
24.
Боровков А. Математическая статистика. М.: Физматлит, 1984.
25.
Крылов Н. Управляемые процессы диффузионного типа. М.: Физматлит, 1977.
Статья представлена к публикации членом редколлегии А.И. Кибзуном.
Поступила в редакцию 04.04.2022
После доработки 10.07.2022
Принята к публикации 28.07.2022
144