Автоматика и телемеханика, № 2, 2022
Нелинейные системы
© 2022 г. А.Н. ЖИРАБОК, д-р техн. наук (zhirabok@mail.ru)
(Дальневосточный федеральный университет, Владивосток,
Институт проблем морских технологий ДВО РАН, Владивосток),
А.В. ЗУЕВ, канд. техн. наук (zuev@dvo.ru)
(Институт проблем морских технологий ДВО РАН, Владивосток),
О. СЕРГИЕНКО, д-р техн. наук (srgnk@uabc.edu.mx)
(Universidad Autonoma de Baja California, Mexicali, Mexico),
А.Е. ШУМСКИЙ, д-р техн. наук (a.e.shumsky@yandex.con)
(Дальневосточный федеральный университет, Владивосток)
ИДЕНТИФИКАЦИЯ ДЕФЕКТОВ В НЕЛИНЕЙНЫХ
ДИНАМИЧЕСКИХ СИСТЕМАХ И ИХ ДАТЧИКАХ
НА ОСНОВЕ СКОЛЬЗЯЩИХ НАБЛЮДАТЕЛЕЙ1
Рассматривается задача идентификации дефектов в нелинейных тех-
нических системах, описываемых динамическими моделями, и их датчи-
ках при наличии возмущений. Для решения задачи применяется метод
с использованием скользящих наблюдателей. Предложена модификация
этого метода, позволяющая расширить семейство систем, для которых
можно решить задачу идентификации, за счет ослабления ограничений,
накладываемых на исходную систему. Эта модификация позволила до-
биться уменьшения сложности средств диагностирования. Изложенное
иллюстрируется практическими примерами.
Ключевые слова: нелинейные системы, дефекты, скользящие наблюдате-
ли, идентификация.
DOI: 10.31857/S0005231022020052
1. Введение и постановка задачи
В основу настоящей работы положена работа [1], где решалась задача
идентификации дефектов в линейных системах с использованием скользя-
щих наблюдателей. Методы построения таких наблюдателей рассмотрены в
[2-15] для различных классов систем: линейных [2-7], нелинейных [8-13], син-
гулярных [14], для отказоустойчивого управления [15]. В настоящей работе
решается задача идентификации дефектов в нелинейных системах и их дат-
чиках.
В отличие от известных подходов [6-15], где скользящий наблюдатель пол-
ного порядка строится на основе исходной системы, предложенный в [1] под-
ход основан на идее построения редуцированной [16] (меньшей размерности)
1 Работа выполнена при финансовой поддержке Российского научного фонда: проект
№ 22-19-00028 (разработан метод построения скользящих наблюдателей) и проект № 22-29-
01303 (выполнен синтез наблюдателей).
63
модели исходной системы, имеющей различную чувствительность к дефек-
там и возмущениям, на основе которой строится скользящий наблюдатель.
Дополнительно к уменьшению размерности скользящего наблюдателя этот
подход позволил расширить семейство систем, для которых решается задача
идентификации, за счет ослабления ограничений, накладываемых на исход-
ную систему.
В настоящей статье задача идентификации дефектов в нелинейных систе-
мах и их датчиках в присутствии возмущений решается по аналогии с подхо-
дом, предложенным в [10], но также при наложении менее жестких, нежели
в [10] и ряде аналогичных работ, ограничений на класс рассматриваемых
систем. Кроме того, предлагаемые подходы позволяют добиться уменьше-
ния сложности средств диагностирования. Отметим, что подход на основе
редуцированной модели исходной системы для линейных систем был также
рассмотрен в [17].
Рассматривается класс систем, описываемых нелинейной моделью
x(t) = F x(t) + Gu(t) + CΨ(x(t), u(t)) + Dd(t) + Lρ(t),
(1.1)
∑
y(t) = Hx(t) +
Didi(t),
i=1
где x ∈ Rn, u ∈ Rm, y ∈ Rl
векторы состояния, управления и выхода;
F и G постоянные матрицы, описывающие линейную динамику; H, C,
L и D известные постоянные матрицы, d(t) скалярная функция, описы-
вающая дефекты: если они отсутствуют, то d(t) = 0, при их появлении d(t)
становится неизвестной ограниченной функцией времени; Di и di(t) ∈ R
постоянные матрицы и функции времени, описывающие дефекты: если де-
фекты отсутствуют, di(t) = 0, при появлении дефекта в i-м датчике di(t) ста-
новится неизвестной функцией времени, i = 1, . . . , l; D1 = (1 0 . . . 0)T, . . . ,
Dl = (0 0 ... 1)T; ρ(t) ∈ Rp описывает возмущения, действующие на систе-
му, предполагается, что ρ(t) неизвестная ограниченная функция времени;
Ψ(x, u) нелинейная составляющая, представленная в виде
ϕ1(A1x,u)
Ψ(x, u) =
,
ϕq(Aqx, u)
A1,... ,Aq
известные постоянные матрицы-строки, ϕ1, . . . , ϕq
нелиней-
ные функции. Предполагается, что функция CΨ(x, u) удовлетворяет условию
Липшица по аргументу x, т.е.
∥C(Ψ(x, u) - Ψ(x′, u))∥ ≤ N∥x - x′∥,
где N > 0 некоторая константа. Это условие не выполняется для многих
функций, описывающих такие практически важные явления, как сухое тре-
ние, насыщение, гистерезис. Для преодоления этого недостатка введем обоб-
щенную функцию Липшица:
(1.2)
∥C(Ψ(x, u) - Ψ(x′, u))∥ ≤ N∥x - x′
∥+M,
64
N,M ≥ 0
некоторые константы, и будем предполагать, что функция
CΨ(x,u) в (1.1) удовлетворяет этому условию.
Следует отметить, что нелинейная модель (1.1) может быть получена из
обычной нелинейной модели
x(t) = f(x(t), u(t), ρ(t), d(t)), y(t) = h(x(t))
за счет выполнения ряда преобразований [18].
Напомним, что в [10] при построении скользящего наблюдателя предпола-
гается, что система (1.1) удовлетворяет следующим условиям:
1) rank(H[L D]) = rank([L D]),
2) все инвариантные нули тройки (F, [L D], H) лежат в левой полуплоскости.
В [10] при этих предположениях система (1.1) представляется в виде компо-
зиции двух подсистем со следующими свойствами: функции d(t) и ρ(t) входят
только в одну подсистему, выход y(t) совпадает с вектором состояния этой
подсистемы, при этом вторая подсистема является устойчивой.
В настоящей работе задача идентификации дефектов решается без нало-
жения на систему указанных условий, ограничивающих класс систем, для
которых задача идентификации имеет решение.
2. Построение модели минимальной размерности
для идентификации дефектов в динамике
Методы построения модели для идентификации дефектов в динамике и
датчиках отличаются друг от друга. Остановимся вначале на дефектах в
динамике, полагая, что дефекты в датчиках отсутствуют.
В основе решения рассматриваемой задачи лежит модель системы (1.1)
меньшей размерности, которая описывается уравнением
x∗(t)=F∗x∗(t)+G∗u(t)+J∗y(t)+C∗Ψ∗(x∗(t),y(t),u(t))+D∗d(t)+L∗ρ(t),
(2.1)
y∗(t)=H∗x∗(t),
где x∗(t) ∈ Rk, k < n размерность модели, y∗ ∈ R, F∗, G∗, J∗, H∗, D∗ и L∗
матрицы, подлежащие определению,
ϕi1 (A∗1,i1 x∗ + A∗2,i1 y, u)
C∗Ψ∗(x∗,y,u) =
,
ϕik (A∗1,ik x∗ + A∗2,ik y, u)
A∗1,i1 ,A∗2,i1 ,... ,A∗1,ik ,A∗2,ik
матрицы, подлежащие определению; через
C∗Ψ∗ обозначена функция C∗Ψ, в которой вектор x заменен на x∗ и y на
основе соотношения Aix = A∗1,ix∗ + A∗2,iy, i = i1, . . . , ik. Функции ϕij , j =
=i1,... ,ik,
это функции из множества ϕi из раздела 1.
Будем полагать, что справедливы равенства x∗(t) = Φx(t) и y∗(t) = R∗y(t),
где Φ и R∗ некоторые постоянные матрицы. Известно [13-15], что эти мат-
65
рицы удовлетворяют условиям
ΦF = F∗Φ + J∗H, R∗H = H∗Φ, ΦG = G∗, ΦC = C∗,
(
)
(2.2)
Φ
Ai = (A∗1,i A∗2,i)
,
i = i1,...,ik, ΦD = D∗, ΦL = L∗.
H
Разрешимость этих условий выясняется ниже в виде уравнений (2.8), (2.9) и
условия (2.10).
Построим не чувствительную к возмущениям модель (2.1) минимальной
размерности, которая будет положена в основу синтеза скользящего наблю-
дателя. С этой целью матрицы F∗ и H∗ будем искать в идентификационной
канонической форме:
0
1
0
0
0
α1
1
0
(2.3)
H∗
=( 1
0
0
0 ),
F∗ =
,
0
αk-1
0
0
где коэффициенты обратной связи α1, . . . , αk-1 выбираются так, что-
бы гарантировать устойчивость подсистемы с вектором состояния x∗∗ =
= (x∗2 . . . x∗k)T.
Отметим, что устойчивость этой подсистемы для произвольной размерно-
сти k обеспечивается в [10] требованием, чтобы все инвариантные нули трой-
ки (F, [L D], H) лежали в левой полуплоскости. Для практически важных
случаев, когда k ≤ 3, это ограничение может быть ослаблено за счет более
детального анализа условий (2.2). Рассмотрим это подробно.
Используя матрицы F∗ и H∗ в (2.3), из (2.2) получаем следующие уравне-
ния для Φ и J∗:
Φ1 = R∗H, Φ1F = Φ2 + J∗1H,
(2.4)
ΦiF = Φi+1 + αi-1Φ2 + J∗iH,
i = 2,...,k - 1,
ΦkF = αk-1Φ2 + J∗kH,
где Φi и J∗i i-е строки матриц Φ и J∗, i = 1, . . . , k.
Остановимся на случае k = 3 как более сложном. По аналогии с [19] урав-
нения (2.4) могут быть преобразованы следующим образом:
R∗HF = Φ2 + J∗1H,
R∗HF2 = Φ2F + J∗1HF = J∗1HF + J∗2H + α1Φ2 + Φ3 =
= J∗1HF + J∗2H + α1(R∗HF - J∗1H) + Φ3 =
= (J∗1 + α1R∗)HF + (J∗2 - α1J∗1)H + Φ3.
В конечном итоге приходим к одному уравнению
R∗HF3 =(J∗1 + α1R∗)HF2 + (J∗2 - α1J∗1 + α2R∗)HF +
(2.5)
+ (J∗3 - α2J∗1)H.
66
Как показано в [18, 19], условие нечувствительности модели (2.1) к возму-
щениям имеет вид ΦL = 0. Нетрудно видеть, что из (2.4) следует
Φ1 = R∗H,
Φ2 = Φ1F - J∗1H = R∗HF - J∗1H,
Φ3 = Φ2F - J∗2H - α1Φ2 = R∗HF2 - J∗1HF - J∗2H - α1Φ2.
Из приведенных соотношений следует, что это условие можно представить в
виде
(2.6)
( R∗
-J∗1
-J∗2 )B(3)
= 0,
где
HL HFL HF2L
B(3) =
0
HL HFL
.
0
0
HL
По аналогии с [10] для возможности построения скользящего наблюдате-
ля функция d(t) должна входить в уравнение только для первой компонен-
ты вектора x∗. Это условие выражается в виде семейства равенств ΦiD = 0,
i = 2,3, которые могут быть представлены в форме
(2.7)
( R∗
-J∗1
-J∗2 )D(3)
= 0,
где
0
HFD HF2D
D(3) = 0 HD HFD
.
0
0
HD
Отметим, что при k > 3 структура матриц B(k) и D(k) становится более слож-
ной, в частности,
HL HFL HF2L
HF3L
0
HL HFL
HF
2L
B(4) =
,
0
0
HL HFL+α1HL
0
0
0
HL
0
HFD HF2D
HF3D
0
HD HFD
HF
2D
D(4) =
,
0
0
HD HFD+α1HD
0
0
0
HD
однако процедура построения редуцированной модели сохраняется.
67
Из (2.6) и (2.7) следует
(2.8)
( R∗
-J∗1
-J∗k-1 )(B(k) D(k)
) = 0, k = 2,3.
При k = 1 (2.8) принимает вид R∗HL = 0.
Чтобы построить модель (3.1), имеющую минимальную размерность, тре-
буется выяснить, при каком минимальном k уравнение (2.8) имеет решение;
ниже будем полагать kmin = 3, что соответствует более сложному случаю.
Далее находится решение уравнения (2.8) в виде (R∗ -J∗1 -J∗2), уравнение
(2.5) преобразуется к виду
J∗3H = - R∗HF3 - (J∗1 + α1R∗)HF2 -
(2.9)
- (J∗2 - α1J∗1 + α2R∗)HF + α2J∗1H,
коэффициенты α1 и α2 выбираются так, чтобы гарантировать устойчивость
модели (2.1), и решается уравнение (2.9) (если оно разрешимо) для неиз-
вестной строки J∗3. Принимаем G∗ := ΦG, на чем заканчивается построение
линейной части модели (2.1).
Отметим, что уравнение (2.9) может иметь несколько решений, т.е. преоб-
разование к модели (2.1) не является однозначным, но все такие решения
обладают требуемыми свойствами. Отметим также, что в ряде случаев в
результате решения уравнения (2.8) определяются не все элементы строки
(R∗ -J∗1 -J∗2), некоторые из них могут оставаться неизвестными. Пусть,
например, матрица J∗2 в этой строке имеет вид J∗2 = (2 z1 z2), где симво-
лами z1 и z2 обозначены неизвестные элементы; остальные элементы строки
определены. Тогда уравнение (2.5) преобразуется к виду
z1H2F + z2H3F + J∗3H = - R∗HF3 - (J∗1 + α1R∗)HF2-
- (2H1F - α1J∗1 + α2R∗)HF + α2J∗1H,
коэффициенты α1 и α2 выбираются для обеспечения устойчивости модели
(2.1), после чего определяются неизвестные элементы z1, z2 и J∗3.
Изложим сказанное в виде процедуры, пояснив действия при k < 3. По-
ложить k = 1 и найти матрицу R∗ из уравнения R∗HL = 0; если существует
такое J∗1, что R∗HF = J∗1H, то конец процедуры, иначе положить k = 2 и
найти строку (R∗ -J∗1) из (2.8). Если существуют такие J∗2 и α1 < 0, что
R∗HF2 - J∗1HF = α1(R∗HF - J∗1H) + J∗2H,
конец процедуры, иначе положить k = 3 и выполнить действия, описанные
выше. Проверить существование J∗2 и α1 можно с помощью рангового кри-
терия: если
(
)
R∗HF - J∗1H
R∗HF - J∗1H
rank
= rank
H
,
H
R∗HF2 - J∗1HF
то J∗2 и α1 существуют.
68
Для построения нелинейной части модели найдем из (2.2) строки матри-
цы Φ, положим C∗ := ΦC, найдем произведение C∗Ψ(x, u) и проверим условие
(
)
Φ
Φ
(2.10)
rank
= rank H
, i = i1,...,ik.
H
Ai
При его выполнении положим D∗ := ΦD; матрицы A∗1i и A∗2i, i = i1, . . . , ik,
входящие в нелинейную часть, определяются из уравнения (2.2). Если урав-
нение (2.9) не имеет решения или равенство (2.10) не справедливо, находится
другое решение уравнения (2.8); возможно, для этого потребуется увеличить
значение k. Если увеличение размерности не приводит к результату, то не
чувствительной к возмущениям модели не существует. В таких случаях мож-
но использовать подход, обеспечивающий минимальную чувствительность к
возмущениям [20].
В результате модель (2.1) принимает вид
x∗1(t) = x∗2(t) + G∗1u(t) + J∗1y(t) + C∗1Ψ∗(x∗∗(t),y(t),u(t)) + ad(t),
(2.11)
x∗∗(t) = F∗∗x∗∗(t) + G∗∗u(t) + J∗∗y(t) + C∗∗Ψ∗(x∗∗(t),y(t),u(t)),
y∗(t) = x∗1(t) = R∗y(t),
где a = Φ1D = 0, x∗∗ = (x∗2 . . . x∗k)T , символами F∗∗, G∗∗, J∗∗ и C∗∗ обозна-
чены подматрицы матриц F∗, G∗, J∗ и C∗, соответствующие x∗∗, матрица F∗∗
устойчива. Поскольку x∗1 = y∗, а y∗ = R∗y, то аргумент x∗ в функции Ψ∗
в (2.1) заменен в (2.11) на x∗∗, для простоты обозначение Ψ∗ сохранено. От-
метим, что свойства модели (2.11) соответствуют свойствам декомпозиции
работы [10], упомянутыми в первом разделе, которые положены в основу
синтеза скользящего наблюдателя.
Отметим также, что модель (2.11) может быть построена эвристическими
методами.
3. Построение скользящего наблюдателя
По аналогии с [10] скользящий наблюдатель ищется на основе (2.11) в виде
x∗1(t)= x∗2(t)+G∗1u(t)+J∗1y(t)+C∗1Ψ∗(x∗∗(t),y(t),u(t))-bey(t)+v(t),
x∗∗(t)=F∗∗x∗∗(t) + G∗∗u(t) + J∗∗y(t) + C∗∗Ψ∗(x∗∗(t),y(t),u(t)),
(3.1)
ŷ∗(t) = x∗1(t),
где
ey(t)
-g|a|
, if ey(t) = 0,
(3.2)
v(t) =
∥ey (t)∥
0
в противном случае,
69
ey(t) = ŷ∗(t) - y∗(t) = ŷ∗(t) - R∗y(t), b > 0. Используя (2.11) и (3.1), запишем
уравнения для ошибок оценивания e1(t) = x∗1(t) - x∗1(t) и e2(t) = x∗∗(t)-
-x∗∗(t):
e
˙
1(t) = -be1(t) + Qe2(t) - ad(t) + ΔΨ1(t) + v(t),
(3.3)
ė2(t) = F∗∗e2(t) + ΔΨ2(t),
где Q = (1 0 . . . 0),
ΔΨ1(t) = C∗1(Ψ∗(x∗∗(t),y(t),u(t)) - Ψ∗(x∗∗(t),y(t),u(t))),
ΔΨ2(t) = C∗∗(Ψ∗(x∗∗(t),y(t),u(t)) - Ψ∗(x∗∗(t),y(t),u(t))).
Предполагается, что функции C∗1Ψ(x(t), u(t)) и C∗∗Ψ(x(t), u(t)) удовлетворя-
ют условию Липшица (1.2) относительно x и функции C∗1Ψ∗(x∗∗(t),y(t),u(t))
и C∗∗Ψ∗(x∗∗(t),y(t),u(t)) получены из них линейными преобразованиями; то-
гда они также удовлетворяют этому условию относительно x∗ и
∥ΔΨ1(t)∥ ≤ N∗1∥e2(t)∥ + M∗1,
(3.4)
∥ΔΨ2(t)∥ ≤ N∗2∥e2(t)∥
для некоторых скаляров N∗1 ≥ 0, M∗1 ≥ 0 и N∗2 ≥ 0.
Так как матрица F∗∗ устойчива, то существуют положительно определен-
ные симметрические матрицы W и P2 такие, что FT∗∗P2 + P2F∗∗ = -W . Будем
полагать, что выполняется условие
(3.5)
λmin(W) > 2∥P2∥N∗2.
Отметим, что неравенство (3.5) нередко используется в процедуре построения
скользящих наблюдателей (см., например, [11]). Оно накладывает определен-
ные ограничения на класс рассматриваемых систем, поскольку константа N∗2
входит в условие Липшица. В другой форме в виде линейного матричного
неравенства N∗2 фигурирует в ряде других работ, например, [10].
Теорема 1. Из (3.5) следует, что часть наблюдателя (3.1) с векто-
ром x∗∗ асимптотически устойчива, т.е. limt→∞ e2(t) = 0.
Доказательство. Рассмотрим функцию Ляпунова
V (t) = eT2 (t)P2e2(t)
и с учетом (3.3) найдем ее производную по времени:
V (t) = (F∗∗e2(t) + ΔΨ2(t))T P2e2(t) + eT2 (t)P2(F∗∗e2(t) + ΔΨ2(t)) =
= eT2 (t)(FT∗∗P2 + P2F∗∗)e2(t) + 2(P2e2(t))TΔΨ2(t) =
= - eT2 (t)We2(t) + 2(P2e2(t))T ΔΨ2(t) ≤
≤ - (λmin(W) - 2∥P2∥N∗2)∥e2(t)∥2 < 0.
Полученное неравенство доказывает теорему.
70
Замечание. Ненулевое значение M∗1 в (3.4) используется для обеспе-
чения возникновения скользящего режима в наблюдателе (3.1) (см. условие
(3.6)). С другой стороны, известно [8], что в скользящем режиме выполняется
равенство e1(t) = 0, а так как limt→∞ e2(t) = 0, то limt→∞(x∗(t) - x∗(t)) = 0,
и здесь можно принять M∗1 := 0.
Теорема 2. Если справедливо (3.5) и скаляр g удовлетворяет условию
M∗1
(3.6)
g > ∥d(t)∥ +
,
|a|
то скаляр b может быть выбран так, что скользящее движение систе-
мы (3.3) асимптотически устойчиво.
Доказательство. Рассмотрим функцию Ляпунова
V (t) = eT1 (t)e1(t) + eT2 (t)P2e2(t)
и с учетом (3.3) найдем ее производную по времени:
V (t) = (-be1(t) + Qe2(t) - ad(t) + ΔΨ1(t) + v(t))T e1(t) +
+ eT1 (t)(-be1(t) + Qe2(t) - ad(t) + ΔΨ1(t) + v(t)) +
+ (F∗∗e2(t) + ΔΨ2(t))T P2e2(t) +
+ eT2 (t)P2(F∗∗e2(t) + ΔΨ2(t)) =
= - 2beT1 (t)e1(t) + 2eT2 (t)QTe1(t) - 2eT1 (t)ad(t) +
+ 2eT1 (t)v(t) + eT2 (t)(FT∗∗P2 + P2F∗∗)e2(t) +
+ 2(e1(t))T ΔΨ1(t) + 2(P2e2(t))T ΔΨ2(t) =
= - 2beT1 (t)e1(t) + 2eT2 (t)QTe1(t) - 2eT1 (t)ad(t) +
+ 2eT1 (t)v(t) - eT2 (t)W e2(t) + 2eT1 (t)ΔΨ1(t) + 2(P2e2(t))T ΔΨ2(t).
Принимая во внимание (3.2) и (3.4) и учитывая, что ey(t) = e1(t), преобразуем
последнее выражение:
V (t) = - 2beT1 (t)e1(t) + 2eT2 (t)QT e1(t) - eT2 (t)W2e2(t) -
ey(t)
- 2eT1 (t)ad(t) - 2eT1 (t)g|a|
+ 2eT1 (t)ΔΨ1(t) + 2(P2e2(t))T ΔΨ2(t) ≤
∥ey (t)∥
≤-2b∥e1(t)∥2 -λmin(W)∥e2(t)∥2 +2∥e1∥∥e2∥∥Q∥+2∥e1∥|a|(∥d(t)∥ -g)+
+ 2∥e1(t)∥(N∗1∥e2(t)∥ + M∗1) + 2∥P2∥N∗2∥e2(t)∥2 =
= - 2b∥e1(t)∥2 - (λmin(W) - 2∥P2∥N∗2)∥e2(t)∥2 +
+ 2(∥Q∥ + N∗1)∥e1(t)∥∥e2(t)∥ + 2M∗1∥e1(t)∥ + 2∥e1(t)∥|a|(∥d(t)∥ - g).
71
Обозначим: a1 = 2b, a2 = λmin(W ) - 2∥P2∥N∗2, a12 = 2(∥Q∥ + N∗1), тогда
(
)
V (t) ≤ -
a1∥e1(t)∥2 - a12∥e1∥∥e2∥ + a2∥e2(t)∥2
+
(
)
M∗1
+ 2∥e1∥|a|
∥d(t)∥ +
-g
|a|
Ясно, что значение b может быть выбрано так, что a1 > 0, а по условию
теоремы a2 > 0. Тогда если a12 ≤ 2√a1a2, то
(
V (t) ≤ -
a1∥e1(t)∥2 - 2√a1a2∥e1∥∥e2∥ + a2∥e2(t)∥2) +
(
)
M∗1
+ 2∥e1(t)∥|a|
∥d(t)∥ +
-g
=
(3.7)
|a|
(
)
M∗1
=-(√a1∥e1(t)∥ -√a2∥e2(t)∥)2 + 2∥e1(t)∥|a| ∥d(t)∥ +
-g
|a|
Из определения коэффициента a1 следует, что значение b может быть выбра-
но так, что a12 ≤ 2√a1a2. Из (3.7) тогда получаем
V (t) < 0, что доказывает
теорему.
Известно [8], что в скользящем режиме ė1(t) = 0 и e1(t) = 0, а так как
e2(t) → 0, то (3.3) влечет v(t) - ad(t) + ΔΨ1(t) → 0. В [8] показывается, что
функция v(t) может быть заменена непрерывной функцией
ey(t)
(3.8)
vδ(t) = -g|a|
,
∥ey (t)∥ + δ
где δ
малое положительное число. Поскольку согласно замечанию спра-
ведливо соотношение ∥ΔΨ1(t)∥ ≤ ∥N∗1∥∥e(t)∥ = 0, функция d(t) может быть
оценена с высокой степенью точности в виде
|a|ey (t)
d(t) = -g
a(∥ey (t)∥ + δ)
Важно, что правая часть последнего выражения зависит только от величины
ошибки оценивания ey(t) = ŷ∗(t) - R∗y(t).
Согласно [22] необходимым и достаточным условием попадания системы
на поверхность скольжения и возникновения скользящего режима являет-
ся неотрицательность действительных частей корней ее характеристического
уравнения, а поскольку матрица F∗∗ устойчива, это условие с очевидностью
выполняется. Удержание системы на этой поверхности обеспечивается усло-
виемV (t) < 0 [2], которое гарантируется неравенством (3.6).
Отметим, что ранее в [2] для оценки функции d(t) было предложено при-
менять фильтр нижних частот; используемая в настоящей работе формула
(3.8) является альтернативой, активно применяемой последнее время.
Отметим также, что второе соотношение в (3.4) не содержит константу,
т.е. M∗2 = 0; это связано с тем, что наличие ненулевой константы приводит
к невозможности существования скользящего режима в наблюдателе (3.1).
72
4. Учет шумов измерений
В случае, когда в измерениях присутствуют шумы, главный резуль-
тат остается прежним, только ужесточаются требования к величине скаля-
ра g для обеспечения скользящего режима. Пусть y(t) = Hx(t) + ρs(t), где
ρs(t) ∈ Rl
функция, описывающая шумы измерений. Предполагается, что
ρs(t)
ограниченная функция: ∥ρs(t)∥ ≤ ρ∗.
Для учета шумов скорректируем вид модели (2.11):
x∗1(t) = x∗2(t) + G∗1u(t) + J∗1Hx(t) + C∗1Ψ(x∗∗(t),Hx(t),u(t)) + ad(t),
x∗∗(t) = F∗∗x∗∗(t) + G∗∗u(t) + J∗∗Hx(t) + C∗∗Ψ(x∗∗(t),Hx(t),u(t)),
y∗(t) = x∗1(t).
Тогда уравнения (3.3) для переменной e1(t) дополнятся новым слагаемым
J∗1ρs(t) (для простоты предполагается, что измерения, входящие во вторую
подсистему, свободны от шума):
e
˙
1(t) = -be1(t) + Qe2(t) - ad(t) + J∗1(y(t) - Hx(t)) + ΔΨ1(t) + v(t) =
(4.1)
= -be1(t) + Qe2(t) - ad(t) + J∗1ρs(t) + ΔΨ1(t) + v(t),
при этом
∥ΔΨ1(t)∥ ≤ N∗1∥e2(t)∥ + M∗1 + S∗∗,
где
∂C∗1Ψ∗(x∗∗,y,u)
S∗∗ ≈ ρ∗
.
∂y
Тогда последние элементы выражения дляV (t) в (3.6) принимают вид
V (t) ≤ - 2b∥e1(t)∥2 - λmin(W )∥e2(t)∥2 + 2∥e1∥∥e2∥∥Q∥ +
+ 2∥e1∥|a|(∥d(t)∥ - g) + 2∥e1(t)∥(N∗1∥e2(t)∥ + M∗1 + ∥J∗1∥ρ∗ + S∗∗) +
+ 2∥P2∥∥e2(t)∥N∗2∥e2(t)∥ =
= - 2b∥e1(t)∥2 - (λmin(W) - 2∥P2∥N∗2)∥e2(t)∥2+
+ 2∥e1(t)∥∥e2(t)∥(∥Q∥ + N∗1) +
(
)
M∗1 + ∥J∗1∥ρ∗ + S∗∗
+ 2∥e1(t)∥|a|
∥d(t)∥ +
-g
=
|a|
= -(√a1∥e1(t)∥ -√a2∥e2(t)∥)2+
(
)
M∗1 + ∥J∗1∥ρ∗ + S∗∗
+ 2∥e1(t)∥|a|
∥d(t)∥ +
-g
|a|
Ясно, чтоV (t) < 0 при
M∗1 + ∥J∗1∥ρ∗ + S∗∗
g > ∥d(t)∥ +
,
|a|
73
что обеспечивает существование скользящего режима. Поскольку в уравне-
ние (4.1) входят шумы измерений, оценка функции d(t) производится с по-
грешностью порядка величины ∥J∗1∥ρ∗ + S∗∗.
5. Построение модели минимальной размерности
для идентификации дефектов в датчиках
Перейдем к задаче идентификации дефектов в датчиках. Для конкретно-
сти ниже будем полагать, что дефект возник в j-м датчике и описывается
матрицей D := Dj и функцией d(t) := dj (t), т.е. j-я компонента вектора y
искажена дефектом.
Отметим, что в [8, 9] также рассматривались задачи идентификации де-
фектов в датчиках и было получено только приближенное решение, посколь-
˙
ку итоговое выражение содержало производную
d(t). Метод, предложенный
в [12], давал точное решение за счет использования специальной системы раз-
мерности n + l, на основе которой строился скользящий наблюдатель. В от-
личие от этих методов в настоящей работе скользящий наблюдатель строит-
ся с использованием редуцированной модели исходной системы размерно-
сти k < n, не чувствительной к возмущениям, которая не содержит производ-
˙
ной
d(t). Кроме того, задача решается без дополнительных условий, накла-
дываемых в [12], что позволяет решить задачу идентификации для более ши-
рокого класса систем.
Как и в разделе 2, в основе решения рассматриваемой задачи лежит мо-
дель системы (1.1) меньшей размерности (редуцированная модель). С учетом
того, как сигнал от неисправного датчика входит в эту модель, рассматрива-
ются три варианта.
1. Сигнал входит только в линейную часть модели.
2. Сигнал входит только в нелинейную часть модели.
3. Сигнал входит как в линейную, так и нелинейную части модели.
Рассмотрим вначале первый вариант и построим модель, которая несколь-
ко отличается от модели (2.1):
x∗(t)=F∗x∗(t)+G∗u(t)+J∗Hx(t)+C∗Ψ∗(x∗(t),H(j)x(t),u(t))+L∗ρ(t),
(5.1)
y∗(t)=H∗x∗(t) + D∗d(t),
где
x,u)
ϕi1 (A∗1i1 x∗ + A∗2i1 H(j)
(5.2)
C∗Ψ∗(x∗,H(j)x,u) =
,
ϕik (A∗1ik x∗ + A∗2ik H(j)x, u)
y(j) = H(j)x вектор y без j-й компоненты, отвечающей неисправному дат-
чику, H(j)
соответствующая матрица. Остальные элементы модели (5.1)
совпадают с (2.1).
Построим не чувствительную к возмущениям модель (5.1) минимальной
размерности, которая затем будет положена в основу синтеза скользящего
74
наблюдателя. С этой целью матрицы F∗ и H∗ будем искать в канонической
форме (2.3) с α1 = . . . = αk-1 = 0; устойчивость наблюдателя будет обеспече-
на другим способом.
Применяя эти формы к (5.2), получим соотношения для матриц Φ и J∗:
(5.3)
Φ1 = R∗H, ΦiF = Φi+1 + J∗iH, i = 1,... ,k - 1, ΦkF = J∗k
H,
где Φi и J∗i i-е строки матриц Φ и J∗, i = 1, . . . , k.
Одним из условий построения скользящего наблюдателя является равен-
ство R∗D = 0, при его невыполнении скользящий режим существовать не
будет. Это условие может быть учтено матрицей D0, имеющей максималь-
ный ранг и удовлетворяющей условию D0D = 0. Тогда из R∗D = 0 следует
R∗ = SD0 для некоторой матрицы S. Известно [18, 19], что уравнения (5.3)
могут быть cведены к одному уравнению
(5.4)
SD0HFk = J∗1HFk-1 + J∗2HFk-2 + ... + J∗k
H.
Как и в разделе 2, модель должна быть нечувствительна к возмущениям и
сигнал от неисправного датчика должен входить в уравнение только для пер-
вой компоненты вектора x∗. Учитывая, что последнее условие записывается
в виде J∗iD = 0, i = 2, . . . , k, уравнение (5.4) можно преобразовать к виду,
аналогичному (2.8):
(5.5)
( S
-J∗1
-J∗k )(V(k) L(k) D(k)
) = 0,
где
D0HFk
D0HL D0HFL ... D0HFk-1L
HFk-1
0
HL ... HFk-2L
V(k) =
L(k) =
,
,
...
H
0
0
0
0
0
0
0
0
0
D
0
0
D(k) =
.
0
D ...
0
0
0
... D
Критерием решения уравнения (5.5) является условие
rank(V(k) L(k) D(k)) < l(k + 1) - 1.
Начиная с k = 1, проверяем это условие, при его выполнении для некоторого k
из (5.5) находим матрицы S и J∗ и затем матрицу Φ из (2.4) и C∗ = ΦC. Далее
вычисляется произведение (2.2) и проверяется условие
(
)
Φ
Φ
(5.6)
rank
(j)
= rank H(j)
,i=i1,... ,ik.
H
Ai
75
Если оно выполняется, полагаем G∗ := ΦG и R∗ := SD0; матрицы A∗1i и A∗2i,
i = i1,...,ik, определяются из (2.2). Если (5.6) не выполняется, находим дру-
гое решение уравнения (5.5) с прежней или увеличенной размерностью k.
В результате модель (5.1) принимает вид, подобный (2.11):
x∗1(t) = x∗2(t)+G∗1u(t)+J∗1Hx(t)+C∗1Ψ∗(x∗∗(t),H(j)x(t),u(t)),
(5.7)
x∗∗(t) = F∗∗x∗∗(t)+G∗∗u(t)+J∗∗H(j)x(t)+C∗∗Ψ∗(x∗∗(t),H(j)x(t),u(t)),
y∗(t) = x∗1(t),
но в отличие от (2.11) матрица F∗∗ может не быть устойчивой. Примем для
простоты, что слагаемое C∗∗Ψ∗(x∗∗, H(j)x, u) не зависит от x∗∗, т.е. имеет вид
C∗∗Ψ∗(H(j)x,u).
Приведем выражение (5.7) к компактному виду:
(
)
x
1∗(t)
x∗(t) =
=
x∗∗(t)
( 0 F
∗1
)( x1∗(t))
(5.8)
=
+ G∗u(t) + J∗Hx(t) +
0
F∗∗
x∗∗(t)
(
)
C∗1Ψ∗(x∗∗(t), H(j)x(t), u(t))
+
,
C∗∗Ψ∗(H(j)x(t),u(t))
где F∗1 = (1 0 . . . 0). Модель (5.8) будет использована для построения сколь-
зящего наблюдателя.
6. Решение задачи
6.1. Первый вариант
Скользящий наблюдатель имеет вид
(
)
x1∗(t)
( 0 F∗1 )( x1∗(t))
=
+ G∗u(t) + J∗y(t) + Qv(t) +
x∗∗(t)
0
F∗∗
x∗∗(t)
(6.1)
(
)
(
C∗1Ψ∗(x∗∗(t), y(j)(t), u(t))
k1
0
)( e1(t))
+
-
,
C∗∗Ψ∗(y(j)(t),u(t))
K2
0
e2(t)
где Q = (1 0 . . . 0)T, v(t) разрывная функция:
ey(t)
-g|J∗1D|
, если ey(t) = 0,
(6.2)
v(t) =
∥ey (t)∥
0
в противном случае,
ey(t) = ŷ∗(t) - R∗y(t) = e1(t) = x∗1(t) - x∗1(t),
e2(t) = x∗∗(t) - x∗∗(t),
76
коэффициенты k1 и K2 обеспечивают устойчивость наблюдателя. Используя
(5.8), (6.1) и равенство y(t) = Hx(t) + Dd(t), приведем уравнение для ошибки
e(t) = (eT1(t), eT2(t))T:
(
)
-k1
F∗1
ė(t) =
e(t) + Qv(t) + QJ∗1Dd(t) + QΔΨ1(t) =
-K2 F∗∗
(6.3)
= F0e(t) + Qv(t) + QJ∗1Dd(t) + QΔΨ1(t),
где
(
)
ΔΨ1(t) = C∗1 Ψ∗(x∗∗(t),y(j)(t),u(t)) - Ψ∗(x∗∗(t),H(j)x(t),u(t)) ,
произведение J∗1D предполагается ненулевым, матрица F0 устойчива. По-
скольку слагаемое C∗∗Ψ∗(H(j)x, u) не зависит от x∗ и сигнал от неисправного
датчика входит только в линейную часть, то ΔΨ2(t) = 0.
Так как функция C∗1Ψ(x, u) удовлетворяет условию Липшица (1.2) по x,
то функция C∗1Ψ∗(x∗∗, y, u) также удовлетворяет этому условию по x∗ и
(6.4)
∥ΔΨ1(t)∥ ≤ N∗∥e(t)∥ + M∗
для неотрицательных N∗ и M∗. Отметим, что ненулевое значение M∗ ис-
пользуется в доказательстве асимптотической устойчивости скользящего дви-
жения системы (6.3) (см. условие (6.5)). С другой стороны, известно [8],
что скользящее движение дает e1(t) = 0, а так как limt→∞ e2(t) = 0, то
limt→∞(x∗(t) - x∗(t)) = 0, и в этом случае можно принять M∗ := 0.
Теорема 3. Если λmin(W) > 2N∗ и скаляр g удовлетворяет условию
(6.5)
g > ∥d(t)∥ + M∗/|J∗1
D|,
то скользящее движение системы (6.3) асимптотически устойчиво.
Доказательство. Рассмотрим функцию Ляпунова V (t) = eT(t)P′e(t) и
найдем ее производную по времени:
V (t) =(F0e(t) + Qv(t) + QJ∗1Dd(t) + QΔΨ1(t))TP′e(t) +
+ eT(t)P′(F0e(t) + Qv(t) + QJ∗1Dd(t) + QΔΨ1(t)) =
(6.6)
=eT(t)(FT0 P′ + P′F0)e(t) + 2eT(t)P′Qv(t) +
+ 2eT(t)P′QJ∗1Dd(t) + 2eT(t)P′QΔΨ1(t).
(
)
1
0
Определим матрицу P′ в виде P′ =
для некоторой положительно
0
P
определенной матрицы P . Тогда
2eT(t)P′Q = 2e1(t),
2eT(t)P′QΔΨ1(t) = 2e1(t)ΔΨ1(t).
77
Так как матрица F0 устойчива, существует положительно определенная мат-
рица W , такая что FT0P′ + P′F0 = -W . Принимая во внимание эти соотно-
шения и (6.2), преобразуем (6.6):
V (t) = - eT (t)W e(t) + 2e1(t)v(t) + 2e1(t)J∗1Dd(t) + 2e1(t)ΔΨ1(t) =
e1(t)
= - eT(t)We(t) - 2|J∗1D|e1(t)g
+
∥e1(t)∥
+ 2e1(t)J∗1Dd(t) + 2e1(t)ΔΨ1(t) =
= - eT(t)We(t) - 2g|J∗1D|∥e1(t)∥ + 2e1(t)J∗1Dd(t) +
+ 2e1(t)ΔΨ1(t) ≤
(6.7)
≤ - eT(t)We(t) + 2∥e1(t)∥∥ΔΨ1(t)∥ +
+ 2|J∗1D|∥e1(t)∥(∥d(t)∥ - g) ≤
≤ - eT(t)We(t) + 2∥e1(t)∥2N∗ + 2∥e1(t)∥M∗ +
+ 2|J∗1D|∥e1(t)∥(∥d(t)∥ - g) =
= - (λmin(W) - 2N∗)∥e1(t)∥2 +
(
)
M∗
+ 2|J∗1D|∥e1(t)∥
∥d(t)∥ +
-g
|J∗1D|
Так как λmin(W ) > 2N∗ и g > ∥d(t)∥ + M∗/|J∗1D|, тоV (t) < 0, что завершает
доказательство.
Из (6.3) и (6.4) с учетом того, что в скользящем режиме
ė1(t) = 0 и
e1(t) = 0 [8], а также e2(t) → 0, получаем v(t) + J∗1Dd(t) = 0. Как и в раз-
деле 4, функцию v(t) можно заменить непрерывной функцией
ey(t)
(6.8)
vδ(t) = -g|J∗1D|
,
∥ey(t)∥ + δ
где δ малое положительное число. В результате функция d(t) может быть
оценена с высокой степенью точности в виде
gey(t)
d(t) = sign(J∗1D)
∥ey(t)∥ + δ
6.2. Второй вариант
Рассмотрим случай, когда j-я компонента вектора y, искаженная дефек-
том, входит только в нелинейную составляющую C∗1Ψ(x∗∗, y, u) модели (5.8).
Тогда условие (5.6) принимает вид (2.10) и матрица D(k) в (5.5) заменяется
78
на
0
0
0
D
0
0
D∗k) =
.
0
D ...
0
0
0
... D
Полагая, что функция d(t) достаточно мала, получим
∂C∗1Ψ(x∗∗,y,u)
C∗1Ψ(x∗∗,y,u) ≈ C∗1Ψ(x∗∗,Hx,u) +
d=
(6.9)
∂yj
= C∗1Ψ(x∗∗,Hx,u) + S∗d,
где
∂C∗1Ψ(x∗∗,y,u)
S∗ =
∂yj
Так как j-я компонента вектора y входит только в нелинейную составляю-
щую, нетрудно видеть, что J∗1D в (6.2) и (6.6) заменяется на S∗. По аналогии
с (6.4) получаем
(6.10)
∥ΔΨ1(t)∥ ≤ N∗∥e(t)∥ + |S∗|∥d(t)∥ + M∗.
Тогда выражение (6.7) принимает вид
V (t) ≤ -(λmin(W ) - 2N∗)∥e1(t)∥2 +
(6.11)
+ 2|S∗|∥e1(t)∥ (∥d(t)∥ + M∗/|S∗| - g2) .
Ясно, чтоV (t) < 0, если λmin(W ) > 2N∗ и g2 > ∥d(t)∥ + M∗/|S∗|, где g2 входит
в (6.2) вместо g. Функция d(t) оценивается в виде
g2ey(t)
d(t) = sign(S∗)
∥ey(t)∥ + δ
6.3. Третий вариант
Как и выше, найдем приближенное решение. В этом случае используем
условие (6.8) и матрицу D(k) из (5.5); разрывная функция v(t) в (6.1) дается
выражением
ey(t)
-g3|(J∗1D + S∗)|
, если ey(t) = 0,
v(t) =
∥ey(t)∥
0
в противном случае,
уравнение для ошибки e(t) принимает вид
ė(t) = F0e(t) + Qv(t) + QΔΨ1(t) + Q(J∗1D + S∗)d(t),
79
где ΔΨ1(t) имеет вид (3.10). Выражение (6.11) изменяется:
V (t) ≤ -(λmin(W ) - 2N∗)∥e1(t)∥2 + 2∥e1(t)∥|J∗1D +
+ S∗|(∥d(t)∥ + M∗/|J∗1D + S∗| - g3) .
Функция d(t) оценивается в виде
g3ey(t)
d(t) = sign(J∗1D + S∗)
,
∥ey(t)∥ + δ
где
g3 > ∥d(t)∥ + M∗/|J∗1D + S∗|.
7. Размещение дополнительных датчиков
для решения задачи идентификации
В ряде случаев задача идентификации дефектов в рассматриваемом дат-
чике не имеет решения, поскольку для него не выполняется условие R∗D = 0.
Эта трудность может быть преодолена введением дополнительных датчиков,
которые позволят построить модель, не чувствительную к возмущениям и
удовлетворяющую условию R∗D = 0. Дополнительные датчики могут быть
также полезны при идентификации дефектов в динамике для уменьшения
размерности скользящих наблюдателей.
Правила определения мест размещения дополнительных датчиков можно
сформулировать следующим обр(ом. П)сть Had матрица, описывающая
H
дополнительный датчик, и Hn =
матрица, описывающая все дат-
Had
чики. Пусть Dn обозначает матрицу, соответствующую неисправному дат-
чику, и матрица D0n имеет максимальный ранг и удовлетворяет условию
D0nDn = 0. Принимая во внимание вид матриц Vk и Lk в (5.5), заключаем,
что матрица Had должна быть такой, чтобы выполнялось условие
rank(D0H) < rank(D0nHn),
поскольку такой выбор дает больше шансов найти матрицу R∗, удовлетво-
ряющую условию R∗Dn = 0. Когда имеются два варианта Had1 и Had2, первый
будет предпочтительнее, если
(7.1)
rank(D0n1Hn1) > rank(D0n2Hn2
),
где матрицы D0n1 и Hn1 соответствуют первому варианту, D0n2 и Hn2 вто-
рому.
Если дополнительные датчики по каким-либо причинам нельзя исполь-
зовать, для оценки неизмеряемых компонент вектора состояния x(t) могут
быть применены так называемые виртуальные датчики [23, 24]. Для реали-
зации таких датчиков может быть использован наблюдатель Люенбергера, не
80
чувствительный к возмущениям, который в случае, когда исходная система
линейна и наблюдаема, имеет следующий вид:
xv(t) = (F - JvH)xv(t) + Gu(t) + Jvy(t),
yv(t) = Hvxv(t),
где xv ∈ Rn вектор состояния, матрица Jv выбирается так, что матрица
F - JvH устойчива, это всегда можно сделать, когда пара (F,H) наблюдаема;
yv
выход наблюдателя, являющийся оценкой неизмеряемой компоненты
вектора состояния x(t), которую необходимо использовать при построении
скользящего наблюдателя для идентификации дефекта в некотором датчике,
Hv соответствующая матрица. Нетрудно видеть, что уравнение для ошибки
e(t) = x(t) - xv(t) имеет вид
ė(t) = (F - JvH)e(t),
и e(t) → 0 при t → ∞, так как матрица F - JvH устойчива. Таким образом,
xv(t) → x(t) и yv(t) → Hvx(t), т.е. переменная yv(t) оценивает неизмеряемую
компоненту вектора x(t).
Детальное решение этой задачи содержится в [25].
8. Практические примеры
8.1. Идентификация дефектов в динамике
Рассмотрим полную модель электропривода робота [21, 26]:
x1(t) = x2(t),
Cri2r
Kvr + hE
Crir
x2(t) = -
x1(t) -
x2(t) +
x3(t) +
HE
HE
HE
-ME - M1sign(x2(t)) + Crirf(β)
+
+ ρ(t),
HE
x3(t) = x4(t),
Crir
Cr
Kvm
x4(t) =
x1(t) -
x3(t) -
x4(t) +
Km x5(t) +
Jm
Jm
Jm
Jm
-M2sign(x4(t)) + Crirf(β)
+
,
Jm
Kω
Rm
x5(t) = -
x4(t) -
x5(t) +
KU u(t) + d(t).
Lm
Lm
Lm
Детальное описание его переменных и коэффициентов можно найти в [21, 26],
дополнительно отметим, что f(β) функция, описывающая нечувствитель-
ность в механической передаче:
β + σ, если β < -σ,
f (β) =
0,
если
-σ ≤ β ≤ σ,
β - σ, если β > σ,
β = x3 - irx1, σ угол проскальзывания редуктора.
81
Дефект и возмущение интерпретируются следующим образом: d(t) =
=-RL
x3(t) соответствует отклонению
R активного сопротивления Rm от
m
его номинального значения; функция ρ(t) = -
M (t) вызвана внешним момен-
HE
том
M (t), приложенным к выходному валу редуктора. Требуется построить
скользящий наблюдатель, инвариантный к возмущению и оценивающий ве-
личину отклоненияRm.
Полагая, что измеряются первая, третья и пятая компоненты вектора со-
стояния, т.е. y1 = x1, y2 = x3 и y3 = x5, получаем следующее описание элект-
ропривода:
0
1
0
0
0
Cri2r
Kvr + hE Crir
0
−
-
0
0
HE
HE
HE
0
0
0
0
1
0
0
F =
,
G=
,
Crir
Cr
Kvm Km
0
0
-
-
Jm
Jm
Jm Jm
KU
Lm
Kω
Rm
0
0
0
-
-
Lm
Lm
0
0
0
0
1
0
0
0
0
0
1
1
0
,D=
H = 0 0 1 0 0
0
,
L=
0
,
C =
0
0
,
0
0
0
0
1
0
0
01
1
0
0
0
-ME - M1sign(A1x) + Crirf(A2x)
HE
Ψ(x, u) =
,
-M2sign(A3x) + Crirf(A2x)
Jm
A1 = (0 1 0 0 0), A2 = (-ir 0 1 0 0), A3 = (0 0 0 1 0).
Ясно, что функция sign(x) удовлетворяет условию (1.2) в виде
|sign(x) - sign(x′)| ≤ 2,
т.е. N = 0 и M = 2. Функция f(β) удовлетворяет условию (1.2) в виде
|f(β) - f(β′)| ≤ |β - β′|,
т.е. N = 1 и M = 0 для этой функции.
Нетрудно видеть, что rank(H[L D]) = 1 = rank([L D]) = 2, т.е. условия ра-
боты [8] не выполняются и предложенными там методами скользящий наблю-
датель построен быть не может.
82
Построим линейную модель, инвариантную к возмущению. Нетрудно про-
верить, что матрицы B(k) и D(k) при k = 2 имеют вид
0
0
0
1
0
0
0
0
Lm
0
0
0
-
B(2) =
,
D(2) =
Rm
0
0
0
0
0 0
0
0
0
0
0
1
Решение уравнения (2.8) дает строку (R∗
- J∗1) с тремя неопределенными
элементами, соответствующими нулям вторых столбцов приведенных выше
матриц, что заметно усложняет решение уравнения (2.9). Поэтому здесь более
удобным оказывается эвристический подход, основанный на анализе модели
электропривода, который дает следующее:
R
m
0
0
Lm
R∗ = (0 0 1), J∗ =
Crir
Cr Km
,
-
Jm
Jm Jm
(
)
0
0
0
0
1
Φ=
,
C∗ = ΦC = (0 1)T .
0
0
0
1
0
Так как аргумент функции f(β) выражается через вектор y, условие (2.10)
с очевидностью выполняется. В результате редуцированная модель описыва-
ется уравнениями
Kω
Rm
x∗1(t) = -
x∗2(t) -
y3(t) +
KU u(t) + d(t),
Lm
Lm
Lm
Kvm
Crir
Cr
x∗2(t) = -
x∗2(t) +
y1(t) -
y2(t) +
Km y3(t) +
Jm
Jm
Jm
Jm
(8.1)
-M2sign(x∗2(t)) + Crirf(y2(t) - iry1(t))
+
,
Jm
y∗(t) =x∗1(t),
где x∗1 = x5, x∗2 = x4. Поскольку
D∗ = ΦD = (1 0)T = 0,
модель чувствительна к дефекту, а так как
Kvm
F∗∗ = -
,
Jm
подсистема с переменной x∗2 устойчива. Поскольку функция f(β) в (8.1) не
содержит вектора состояния x∗, для нее N∗2 = 0.
83
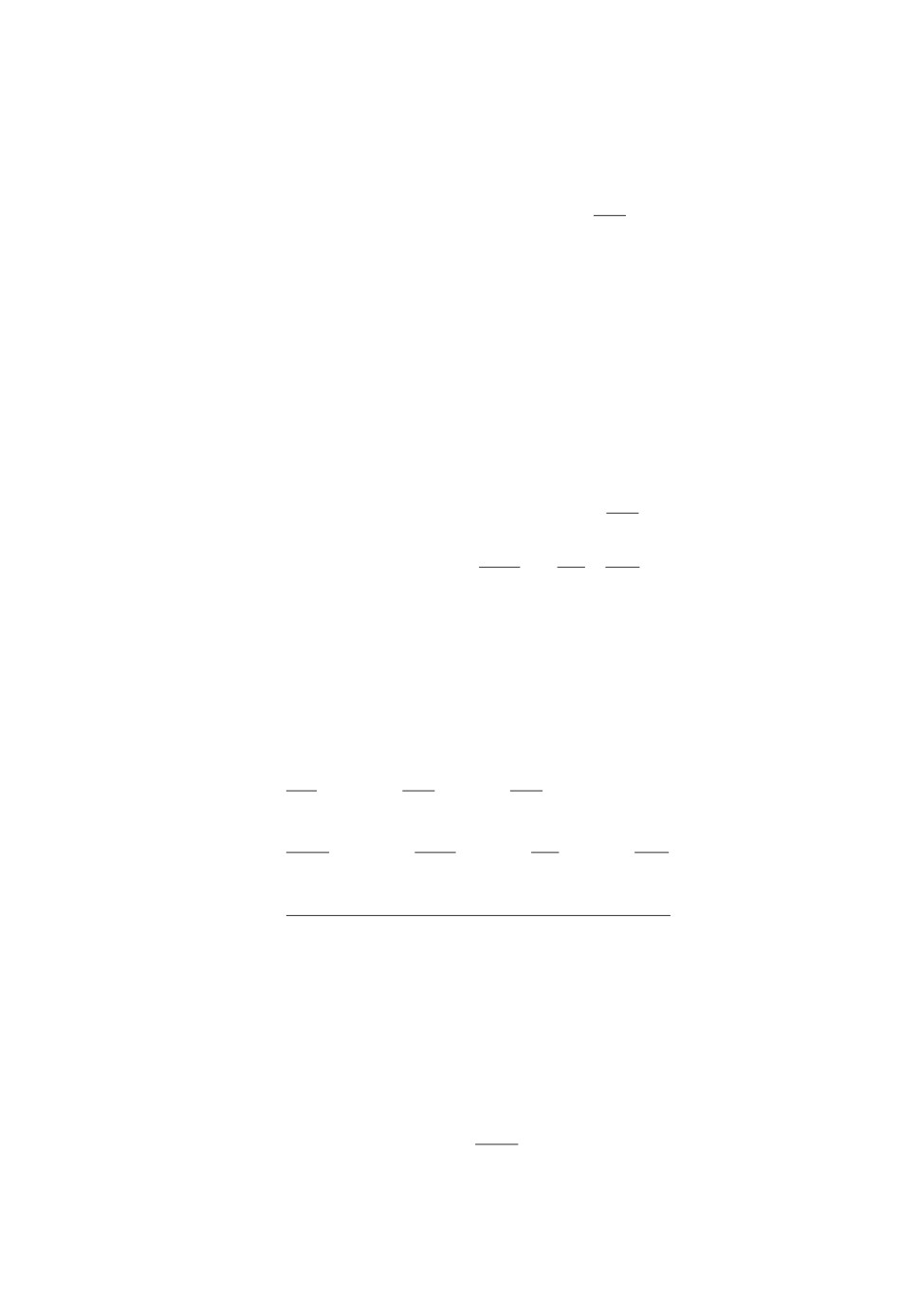
~
~
R(t), Ом
DR(t) ´ 10-5, Ом
0,12
4
0,10
3
1
0,08
2
0,06
2
1
0,04
0
0,02
0
-1
-0,02
-2
0
2
4
6
8
10
0
2
4
6
8
10
t, c
t, c
˜
Рис. 1. Функция
R, ее оценка и ошибка оценивания
R(t) -
R(t).
Сравнивая (2.11) и (8.1), приходим к выводу, что a = 1; примем b := 0,3.
Cкользящий наблюдатель описывается уравнениями
Rm
x∗1(t) = -Kω
x∗2(t) -
y3(t) +
KU u(t) + v(t) - 0,3ey(t),
Lm
Lm
Lm
Crir
Cr
x∗2(t) = -Kvm
x∗2(t) +
y1(t) -
y2(t) +
Km y3(t) +
Jm
Jm
Jm
Jm
(8.2)
-M2sign(x∗2(t)) + Crirf(y2(t) - iry1(t))
+
,
Jm
ŷ∗(t) = x∗1(t),
где ey(t) = ŷ(t) - y3(t),
ey(t)
-g
, если ey(t) = 0,
v(t) =
∥ey (t)∥
0
в противном случае,
g > ∥d(t)∥. Оценка функции d(t) дается выражением
ey(t)
(8.3)
d(t) = -g
∥ey (t)∥ + δ
Моделирование производилось при следующих значениях параметров:
Jm = 0,0001 Kgm2, Kω = 0,02 V s, KU = 100, Rm = 0,4 Ω, Lm = 0,004 H,
Km = 0,02 Nm/A, ir = 100, Cr = 2 Nm/rad, M1 = 1 Nm, M2 = 0,01 Nm,
Kvm = 10-5 Nms/rad, Kr = 0,01 Nms/rad, σ = 0,01 rad. Заданные показате-
ли качества управления обеспечиваются ПИД регулятором. Входное воздей-
ствие на электропривод было таким, чтобы угол вращения выходного вала
редуктора описывался функцией xref1 (t) = sin(t) + 1,5t.
Возмущение ρ(t) моделировалось функцией
M (t) = 7 sin(0,8t) Nm на ин-
тервале t = 1 ÷ 10 c. Дефект d(t) вызван плавным изменением активного со-
противления Rm от 0 до 0,1 Ω начиная с момента t = 4 c. При моделировании
задавались g = 100 и δ = 0,05.
84
Результаты моделирования представлены на рис. 1, символом 1 на нем
представлена функцияR(t), символом 2 ее оценка согласно формуле (8.3),
а также ошибка оценивания. Из рисунка видно, что оценка равнa нулю на
интервале 0 ÷ 4 с, что означает нечувствительность наблюдателя (8.2) к воз-
мущению.
8.2. Идентификация дефектов в датчиках
Заметим, что нередко в исполнительных элементах современных ме-
хатронных и робототехнических объектов можно пренебречь упругостью ме-
ханической передачи и нечувствительностью. Тогда электропривод можно
описать упрощенной моделью:
x1(t) = γ1x2(t),
x2(t) = γ2x3(t) + γ6sign(x2) + ρ(t),
(8.4)
x3(t) = γ3x2(t) + γ4x3(t) + γ5u(t),
y1(t) = x1(t) + d1(t), y2(t) = x3(t) + d2(t).
Здесь γ1 = 1/ir, γ2 = Kvm/Jm, γ3 = -Kω/Lm, γ4 = -Rm/Lm, γ5 = KU /Lm,
γ6 = -M2/Jm. Электропривод описывается следующими матрицами:
0
γ1
0
0
0
0
F =
0
0
γ2
, G=
0
, C =
γ6
, L=
1
,
0
γ3
γ4
γ5
0
0
( 1 0 0)
H =
,
Ψ(x, u) = sign(Ax), A = (0 1 0),
0
0
1
( 1)
( 0)
D1 =
,
D2 =
0
1
По аналогии с [1] построим модель, не чувствительную к возмущению:
x∗(t) = -γ1γ4H2x(t) - γ1γ5u(t),
y∗(t) = x∗(t),
где x∗ = γ3x1 - γ1x3 и R∗ = (γ3 - γ1).
Поскольку R∗D1 = 0 и R∗D2 = 0, требуемое условие построения скользя-
щего наблюдателя не выполняется, необходимо использовать дополнитель-
ный датчик, формирующий выход y3(t) = x2(t) + d3(t). Новые матрицы Hn
и Dnj принимают вид
1
0
0
1
0
0
Hn =
0 0 1
, Dn1 =
0
, Dn2 =
0
, Dn3 =
1
.
0
1
0
0
1
0
85
(
)
1
0
0
Нетрудно видеть, что D0
=
и rank(D02H) = 1 < rank(D0n2Hn) =
n2
0
1
0
= 2, т.е. условие (7.1) выполняется.
Поскольку переменная x1 = y1 не входит в правые части уравнений (8.4),
дефекты в первом датчике рассматриваемым методом идентифицированы
быть не могут.
Вначале рассмотрим третий датчик (как более простой) и построим соот-
ветствующую редуцированную модель. Можно показать, что она описывает-
ся уравнениями
x′∗(t) = γ1H3x(t),
y∗(t) = x′∗(t) = y1(t),
где x′∗ = x1, R′∗ = (1 0 0). Нетрудно видеть, что R′∗Dn3 = 0, J′∗Dn3 = γ1.
Скользящий наблюдатель описывается в виде
x′
(t) = γ1y3(t) + v′(t) - k′e′(t),
∗
ŷ′∗(t) = x′∗(t),
где
e′(t)
v′(t) = -g′
γ1 ∥e′(t)∥ + δ′,
e′(t) = ŷ′∗(t) - y1(t) = x′∗(t) - x′∗(t), g′ > ∥d3(t)∥, k′ > 0. Как результат, полу-
чаем оценку для функции d3(t):
e′(t)
d3(t) = g′
∥e′(t)∥ + δ′
Приведем модель для второго датчика:
x′′∗(t) = γ2H2x(t) + γ6sign(y3(t)),
y′′∗(t) = x′′∗(t) = y3(t),
где x′′∗ = x2, R′′∗ = (0 1 0); ясно, что R′′∗Dn2 = 0, J′′∗Dn2 = γ2. Скользящий на-
блюдатель принимает вид
e′′(t)
x′′
(t) = γ2y2(t) + γ6sign(y3(t)) - g′′
∗
(8.5)
γ2 ∥e′′(t)∥ + δ′′-k′′e′′(t),
ŷ′′∗(t) = x′′∗(t),
где e′′(t) = ŷ′′∗(t) - y3(t) = x′′∗(t) - x′′∗(t), g′′ > ∥d2(t)∥, k′′ > 0. Функция d2(t)
оценивается следующим образом:
e′′(t)
(8.6)
d2(t) = g′′
∥e′′(t)∥ + δ′′
86
^
d2(t), A
d2(t) - d2(t), A
2,5
0,25
0,20
2,0
0,15
1
0,10
1,5
0,05
0
1,0
2
-0,05
-0,10
0,5
-0,15
0
-0,20
-0,25
-0,5
-0,30
0
2
4
6
8
10
0
2
4
6
8
10
t, c
t, c
Рис. 2. Функция d2(t), ее оценка и ошибка оценивания d2(t) -
d2(t).
Поскольку в уравнение для переменной x2 входит возмущение ρ, величина
дефекта во втором датчике будет оценена с погрешностью.
При моделировании задавались следующие параметры рассматриваемо-
го следящего электропривода: JH = 0,0001 Kgm2, Kω = 0,02 V c, KU = 100,
R = 0,4 Ω, L = 0,004 H, KM = 0,02 Nm/A, Kd = 0,02 N/m, ip = 100. Задан-
ные показатели качества управления обеспечиваются типовым корректирую-
щим устройством с передаточной функцией
(0,089s + 1)(0,0011s + 1)
W (s) =
(0,001s + 1)(0,001s + 1)
Желаемое значение угла поворота выходного вала редуктора принималось в
виде xref1 (t) = sin(t).
Возмущение ρ(t) имитировалось действием внешнего нагрузочного мо-
мента величиной
M (t) = 0,005 sin(0,8t) Nm на интервале t = 6 ÷ 9 c. Де-
фект d2(t) представлен функцией 2 sin((t - 2)π/6) на интервале t = 2 ÷ 8 c.
Результаты моделирования с g′′ = 100 и δ′′ = 10-3 в (8.5) показаны на
рис. 2, где символом 1 помечена функция d2(t), символом 2 ее оценка со-
гласно (8.6); также показана ошибка оценивания, которая, как видно, до-
статочно мала. Отметим, что ошибка оценивания на интервале t = 6 ÷ 9 c
возрастает, что можно объяснить наличием возмущения ρ(t).
9. Заключение
В работе была поставлена и решена задача идентификации дефектов в
нелинейных динамических системах и их датчиках при наличии внешних
возмущающих воздействий. Для решения поставленной задачи было пред-
ложено использовать метод на основе скользящих наблюдателей. В работе
разработана модификация этого метода, позволившая расширить класс си-
стем, для которых удается решить задачу идентификации. Такое расшире-
ние стало возможным за счет ослабления ограничений, накладываемых на
исходную систему. Кроме того, эта модификация позволила уменьшить раз-
мерность построенных наблюдателей. Для случая дефектов в датчиках были
87
рассмотрены три случая вхождения показаний дефектного датчика и для
каждого из них получены соответствующие формулы для оценки величины
дефекта.
СПИСОК ЛИТЕРАТУРЫ
1.
Жирабок А.Н., Зуев А.В., Шумский А.Е. Диагностирование линейных динами-
ческих систем: подход на основе скользящих наблюдателей // АиТ. 2020. № 2.
С. 18-35.
Zhirabok A., Zuev A., Shumsky A. Diagnosis of linear dynamic systems: an approach
based on sliding mode observers // Autom. Remote Control. 2020. V. 81. No. 2.
P. 211-225.
2.
Уткин В.И. Скользящие режимы и их применение в системах с переменной
структурой. М.: Наука, 1974.
3.
Коровин С.К., Фомичев В.В. Наблюдатели состояния для линейных систем с
неопределенностью. М.: ФИЗМАТЛИТ, 2007.
4.
Краснова С.А., Кузнецов С.И. Оценивание на скользящих режимах неконтроли-
руемых возмущений в нелинейных динамических системах // АиT. 2005. № 10.
С. 54-69.
Krasnova S.A., Kuzntsov S.I. Uncontrollable perturbation of nonlinear dynamic sys-
tems: estimation on moving modes // Autom. Remote Control. 2005. V. 66. No. 10.
P. 1580-1593.
5.
Краснова С.А., Уткин В.А. Каскадный синтез наблюдателей состояния дина-
мических систем. М.: Наука, 2006.
6.
Shtessel Yu., Edwards C., Fridman L., Levant A. Sliding mode control and observa-
tion. N.Y.: Springer, 2014.
7.
Fridman L., Levant A., Davila J. Observation of linear systems with unknown inputs
via high order sliding-modes // Int. J. Syst. Sci. 2007. V. 38. P. 773-791.
8.
Edwards C., Spurgeon S., Patton R. Sliding mode observers for fault detection and
isolation // Automatica. 2000. V. 36. P. 541-553.
9.
Kalsi K., Hui S., Zak S. Unknown input and sensor fault estimation using sliding-
mode observers // Proc. 2011 ACC, San Francisco. 2011. P. 1364-1369.
10.
Yan X., Edwards C. Nonlinear robust fault reconstruction and estimation using a
sliding modes observer // Automatica. 2007. V. 43. P. 1605-1614.
11.
He J., Zhang C. Fault reconstruction based on sliding mode observer for nonlinear
systems // Mathematical Problems in Engineering. 2012. P. 1-22.
12.
Tan C., Edwards C. Sliding mode observers for robust detection and reconstruction
of actuator and sensor faults // Int. J. Robust and Nonlinear Control. 2003. V. 13.
P. 443-463.
13.
Brahim A., Dhahri S., Hmida F., Sellami A. Simultaneous actuator and sensor
faults reconstruction based on robust sliding mode observer for a class of nonlinear
systems // Asian J. Contr. 2017. V. 19. P. 362-371.
14.
Chang J., Tan C., Trinh H., Kamal M. State and fault estimation for a class of
non-infinitely observable descriptor systems using two sliding mode observers in cas-
cade // J. Franklin Institute. 2019. V. 356. P. 3010-3029.
15.
Castillo I., Fridman L., Moreno J. Super-twisting algorithm in presence of time and
state dependent perturbations // Int. J. Control. 2018. V. 91. P. 2535-2548.
88
16.
Мироновский Л.А. Функциональное диагностирование динамических систем.
М.-СПб.: Изд-во МГУ-ГРИФ, 1998.
17.
Zhirabok A., Shumsky A., Zuev A. Fault diagnosis in linear systems via sliding mode
observers // Int. J. Control. 2021. V. 94. No. 2. P. 327-335.
18.
Zhirabok A., Shumsky A., Solyanik S., Suvorov A. Fault detection in nonlinear sys-
tems via linear methods // Int. J. Applied Mathematics and Computer Science. 2017.
V. 27. P. 261-272.
19.
Жирабок А.Н., Шумский А.Е., Павлов С.В. Диагностирование линейных дина-
мических систем непараметрическим методом // АиТ. 2017. № 7. С. 3-21.
Zhirabok A., Shumsky A., Pavlov S. Diagnosis of linear dynamic systems by the non-
parametric method // Autom. Remote Control. 2017. V. 78. No. 7. P. 1173-1188.
20.
Жирабок А.Н., Зуев А.В., Шумский А.Е. Методы диагностирования линейных
систем на основе скользящих наблюдателей // Известия РАН. Теория и системы
управления. 2019. № 6. С. 73-89.
Zhirabok A., Zuev A., Shumsky A. Methods of diagnosis in linear systems based on
sliding mode observers // J. Comput. Syst. Sci. Int. 2019. Vol. 58. No. 6. P. 898-914.
21.
Зуев А.В., Филаретов В.Ф. Особенности создания комбинированных позици-
онно-силовых систем управления манипуляторами // Известия РАН. Теория и
системы управления. 2009. № 1. С. 154-162.
Zuev A., Filaretov V. Features of designing combined force/position manipulator
control systems // J. Comput. Syst. Sci. Int. 2009. Vol. 48. P. 146-154.
22.
Емельянов С.В. Системы автоматического управления с переменной структу-
рой. М.: Наука, 1967.
23.
Blanke M., Kinnaert M., Lunze J., Staroswiecki M. Diagnosis and Fault-Tolerant
Control. Berlin: Springer-Verlag, 2006.
24.
Witczak M. Fault diagnosis and fault tolerant control strategies for nonlinear systems.
Berlin: Springer, 2014.
25.
Жирабок А.Н., Ким Чхун Ир. Виртуальные датчики в задаче функционально-
го диагностирования // Мехатроника, автоматизация, управление. 2021. № 6.
С. 298-303.
Zhirabok A., Kim C. Virtual sensors in the fault diagnosis problem // Mekhatronika,
Avtomatizatsiya, Upravlenie. 2021. Vol. 22. No. 6. P. 298-303.
26.
Филаретов В.Ф. Самонастраивающиеся системы управления приводами мани-
пуляторов. Владивосток: Изд-во ДВГТУ, 2000.
Статья представлена к публикации членом редколлегии С.А. Красновой.
Поступила в редакцию 28.04.2021
После доработки 21.09.2021
Принята к публикации 15.10.2021
89