Автоматика и телемеханика, № 4, 2022
Обзоры
© 2022 г. C.Р. ОРЛОВА (farhulina.sr@edu.spbstu.ru)
(Санкт-Петербургский политехнический университет Петра Великого),
А.В. ЛОПОТА, д-р техн. наук (alopota@rtc.ru)
(Центральный научно-исследовательский и опытно-конструкторский институт
робототехники и технической кибернетики, Санкт-Петербург)
ТРЕХМЕРНОЕ РАСПОЗНАВАНИЕ:
ТЕКУЩЕЕ СОСТОЯНИЕ И ТЕНДЕНЦИИ1
Рассматривается область трехмерного технического зрения и, в част-
ности, трехмерного распознавания. Выделены задачи трехмерного техни-
ческого зрения, проведены обзоры способов получения и представления
трехмерных данных, приложений трехмерного технического зрения. Про-
веден обзор методов глубокого обучения в задачах трехмерного распозна-
вания. Выявлены основные современные тенденции области. На данный
момент предложено большое количество архитектур нейронных сетей,
сверточных слоев, операций сэмплирования, пулинга и агрегации, спо-
собов представления и обработки входных трехмерных данных. Область
находится в стадии активного развития, при этом наибольшее разнообра-
зие методов представлено для облаков точек.
Ключевые слова: трехмерное распознавание, глубокое обучение, компью-
терное зрение.
DOI: 10.31857/S000523102204002X, EDN: AAALWB
1. Введение
Трехмерное техническое или компьютерное зрение становится все более
актуально: технологии и оборудование, необходимые для получения трех-
мерных представлений, их обработки и визуализации, становятся дешевле
и доступнее, вместе с этим растет и заинтересованность в приложениях трех-
мерного компьютерного зрения. Появление технологий виртуальной и допол-
ненной реальности, рост популярности мобильных роботов и разнообразных
сервисных интеллектуальных систем дополнительно стимулируют развитие
технического зрения.
Особенно интересна область трехмерного распознавания, поскольку она
направлена на решение задачи понимания окружающего мира, являющейся
одной из основных проблем технического и компьютерного зрения. Несмотря
на то что был достигнут большой прогресс в задачах распознавания изоб-
ражений, трехмерные модели дают намного более полное представление о
1 Работа выполнена при финансовой поддержке Российcкого фонда фундаментальных
исследований (проект № 20-37-90039).
5
сцене, объектах в ней и их взаимном расположении. Интуитивно понятно,
что распознавание трехмерных представлений, хотя и является более слож-
ной задачей, должно позволить получить более качественные и устойчивые
системы, действующие в пространстве или анализирующие его и объекты в
нем. И хотя очевидно, что проблема понимания машиной окружающего мира
не будет решена в ближайшем будущем, стоит начать формировать фунда-
мент для будущих исследований, развивая область трехмерного распознава-
ния. Кроме того, существует множество менее глобальных задач, которые
вполне под силу решить современной науке и технике.
2. Трехмерное техническое зрение
Трехмерное техническое (компьютерное) зрение предполагает работу с
трехмерными представлениями существующих или синтезированных объек-
тов и сцен. Можно выделить несколько типичных задач трехмерного техни-
ческого зрения:
1.
Получение трехмерных представлений существующих объектов и
сцен — трехмерное сканирование. Для этой задачи существует множе-
ство методов и аппаратуры, существуют также нейросетевые методы,
генерирующие трехмерные представления;
2.
Обработка, фильтрация и анализ трехмерных представлений может
преследовать различные цели: фильтрация шумов и выбросов, коррек-
ции (например, интерполяция или прореживание), совмещение несколь-
ких частичных представлений в одно, приведение к другому виду пред-
ставления (например, получение полигональной модели из облака то-
чек);
3.
Построение карт и локализация, SLAM — популярны в мобильной ро-
бототехнике;
4.
Визуализация трехмерных представлений — может быть как вспомо-
гательной (контроль результатов при работе с трехмерными представ-
лениями), так и основной (в приложениях дополненной реальности) за-
дачей;
5.
Распознавание образов по трехмерным представлениям, семантиче-
ский анализ — смежное направление, привлекающее различные мето-
ды компьютерного зрения, машинного и глубокого обучения. Задачи
этой группы направлены на получение из трехмерных представлений
информации более высокого уровня абстракции: например, распознава-
ние в облаке точек сцены в виде жилой комнаты с мебелью и людьми.
Это необходимо для создания систем, способных понимать окружаю-
щий мир и взаимодействовать с ним.
2.1. Представления трехмерных данных
Трехмерные данные, отображающие сцены и объекты реального мира или
синтезированные каким-либо методом, построенные дизайнером, могут быть
представлены в различных формах. Объединив знания из таких областей,
6
как техническое зрение и компьютерная графика, можно составить единый
список, включающий все наиболее распространенные формы представлений:
1. Облако точек (Point cloud);
2. Карта глубины (Depth map), зачастую рассматривается как 2,5-мерное
представление;
3. RGB-D изображение, также рассматривается как 2,5-мерное представ-
ление;
4. Коллекция изображений — строго говоря, не является трехмерным
представлением. Однако имеется большое количество методов получе-
ния облака точек из коллекции изображений (с каналом глубины и без
него), включая раскадровку видеоряда;
5. Трехмерные (3D) модели:
a. Каркасные модели;
б. Граничные (поверхностные) модели;
в. Твердотельные (Solid) модели:
— Конструктивная сплошная (блочная) геометрия (КБГ,
constructive solid geometry, CSG);
— Воксельные (Voxel) модели;
г. Полигональная сетка (Polygon mesh);
д. Параметрические модели;
е. Неявные поверхности (Implicit surfaces).
Наиболее популярными представлениями являются облако точек, полиго-
нальная сетка и воксельная модель. Карта глубины, RGB-D изображение и
коллекция мультиракурсных изображений, строго говоря, не являются трех-
мерными представлениями, однако чрезвычайно популярны (RGB-D камеры
становятся все более доступны) и используются в фотограмметрических ме-
тодах реконструкции объекта или сцены.
Облако точек — это набор точек в пространстве, представляющий фигуры,
объекты, поверхности. Каждая точка представлена трехмерными координа-
тами, также могут быть дополнительные атрибуты, например интенсивность
или цвет. Облака точек просто получать и хранить, они позволяют быст-
ро выполнять линейные преобразования в матричном представлении. Также
облака точек легко совмещать друг с другом и отображать на плоскость.
Большинство методов трехмерного сканирования получают именно облако
точек.
Карта глубины — двумерное одноканальное изображение, содержащее ин-
формацию о расстоянии от поверхностей сцены до точки (области) съемки.
RGB-D изображение — это двумерное четырехканальное изображение, со-
держащее в одном канале карту глубины, а в оставшихся трех — цветовую
информацию (RGB изображение сцены).
Воксельные (от англ. volumetric pixel — объемный пиксель) модели или
воксельные сетки (voxel grid) основаны на следующем подходе: все трехмер-
ное пространство представляется в виде равномерной сетки или матрицы, в
ячейках которой находятся воксели — трехмерные, объемные пиксели. По-
ложение вокселя обозначается его позицией в матрице, а не координатами
7
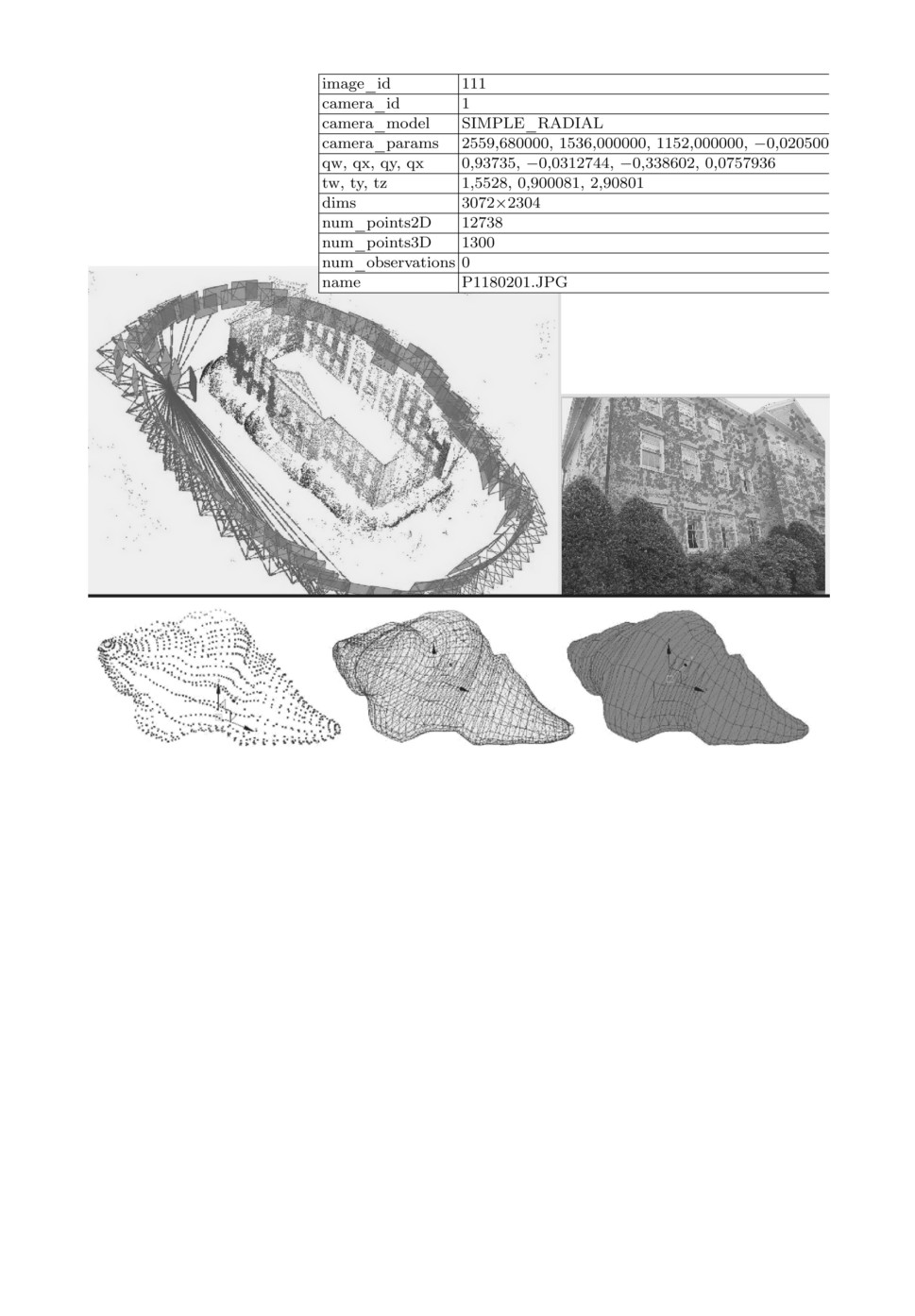
Рис. 1. Сверху слева: Облако точек, построенное в программе COLMAP [1] по
128 изображениям (RGB) одного из зданий университета Северной Каролины
в Чапел-Хилл [2]. Показаны вычисленные положения камеры. Выбрано одно
положение (показано более темным цветом). Сверху справа: Изображение,
соответствующее выбранному положению, и его параметры. Отмечены точки
(пиксели), использованные при построении облака. Внизу: Трехмерная модель
круассана, основанная на полигональной сетке. Слева показаны вершины, по
центру — ребра, справа — грани модели. Изображение взято из [3].
в пространстве. Воксель может содержать множество атрибутов, например
цвет или материал. Воксельные модели довольно часто используются в ме-
дицине в задачах анализа.
Модели, основанные на полигональной сетке (polygon mesh), как и гранич-
ные, состоят из вершин, ребер и граней.
Но в отличие от граничных моделей грани полигональной сетки всегда
плоские, т.е. являются полигонами. На текущий момент модели, основанные
на треугольной полигональной сетке, являются наиболее популярной фор-
мой представления трехмерных данных в области компьютерной графики и
в задачах интерактивной визуализации.
8
2.2. Приложения трехмерного распознавания
В настоящий момент с повышением доступности сенсорной, вычислитель-
ной техники и программных средств, способных выполнять трехмерное ска-
нирование и реконструкцию, имеется широкое поле возможных приложений
трехмерного технического зрения и, в частности, распознавания.
В медицине методы глубокого обучения используются для сегментации
трехмерных снимков и обнаружения и оценки положения, размеров и формы
каких-либо элементов — органов, опухолей и т.д. При этом часто используется
воксельное представление, так как многие методы сканирования предполага-
ют получение набора снимков при движении сканера в одном направлении
с заданным шагом. Возможны приложения, помогающие оценить позу, суту-
лость пациента и характер его движений.
В геоматике трехмерное распознавание может быть полезно в задачах раз-
метки местности и поиска каких-либо объектов в массивах трехмерных дан-
ных. Генерация трехмерных объектов может быть востребована в задачах
разработки и дизайна изделий.
В приложениях дополненной реальности часто используются двумерные
изображения, — это обусловлено необходимостью использования таких при-
ложений на мобильных устройствах с малыми вычислительными ресурсами
и объемом памяти, однако в некоторых задачах может потребоваться исполь-
зование трехмерных представлений — например в приложениях дополненной
реальности для медицины, обеспечивающих качественную визуализацию ис-
следуемых областей, выполнение сегментации, детектирования каких-либо
элементов и позволяющих взаимодействовать с трехмерной моделью. Воз-
можно применение таких технологий и на производстве.
В области автономного вождения методы глубокого обучения применяют-
ся в таких задачах анализа сцены, как обнаружение объектов, сегментация
сцены.
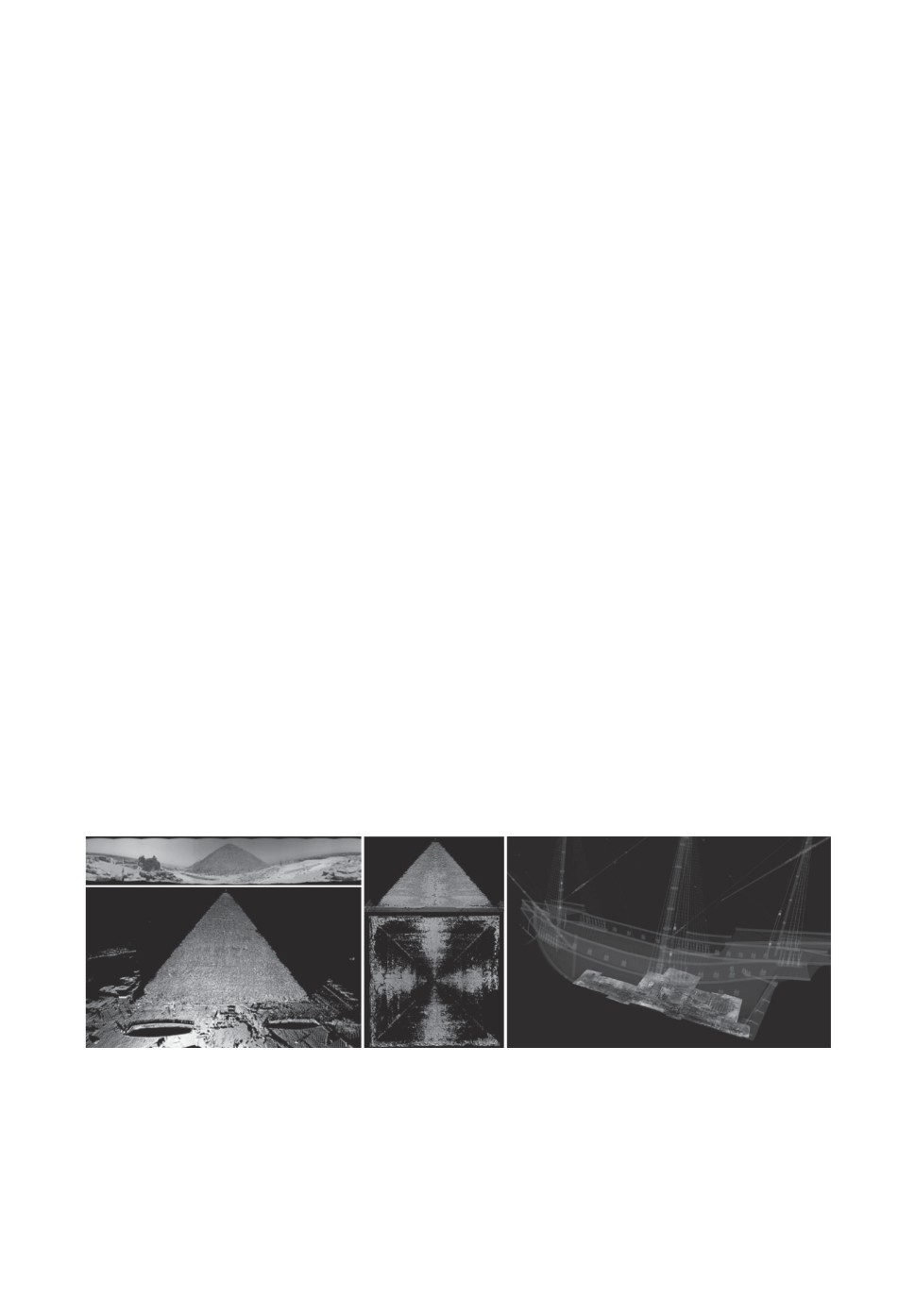
Рис. 2. Слева: Скан восточной стороны пирамиды Хеопса, сверху показана
двумерная панорама [4]. По центру: Обнаруженная аномалия, сверху пока-
зана восточная сторона пирамиды с цветовым (и яркостным) кодированием
отклонения поверхности ската от плоскости, снизу показано расположение
аномалий на виде сверху [4]. Справа: Положение трехмерной модели иссле-
дованной на раскопках части дна судна XVI в. относительно модели судна
целиком [5].
9
В области мобильных и сервисных роботов, сервисных систем может быть
множество разнообразных приложений трехмерного распознавания, вклю-
чающих всевозможные задачи: сегментация сцены, сегментация частей объ-
ектов, обнаружение и локализация объектов и ключевых точек, классифика-
ция, оценка позы и т.д. В данной области и задачи, и окружение могут быть
очень вариативны, также часто предполагается взаимодействие с человеком,
поэтому вариант использования именно трехмерного представления сцены
или объектов может быть наиболее выгоден, поскольку дает максимально
полную информацию о сцене.
3. Задачи и методы трехмерного распознавания
Главной проблемой компьютерного зрения является проблема понимания
машиной окружающего мира. Человек, даже смотря не на какую-либо реаль-
ную сцену, а на ее изображение, представляет ее в трехмерном виде, оцени-
вает положение объектов друг относительно друга, пространство, доступное
для действий и т.д. При этом ряд исследований показывает, что люди вос-
принимают трехмерную сцену не в виде абсолютной карты глубины, а по от-
носительному расположению поверхностей [6]. Предполагается, что человек
строит одну или несколько трехмерных моделей сцены и использует их для
различных задач: оценки расстояния, поиска предметов, построения марш-
рута. Также большую роль играет понимание контекста. Ирвинг Бидерман,
ученый в области нейронаук и зрения, сформулировал пять ограничений, ко-
торым должна следовать хорошо организованная сцена: ограничение опоры,
взаимного позиционирования, вероятности появления, положения и разме-
ра. Эксперименты показали, что люди в среднем дольше ищут предмет на
изображении сцены, если он нарушает хотя бы одно из ограничений Бидер-
мана [7]. Таким образом, люди распознают предметы в привычном контексте
быстрее.
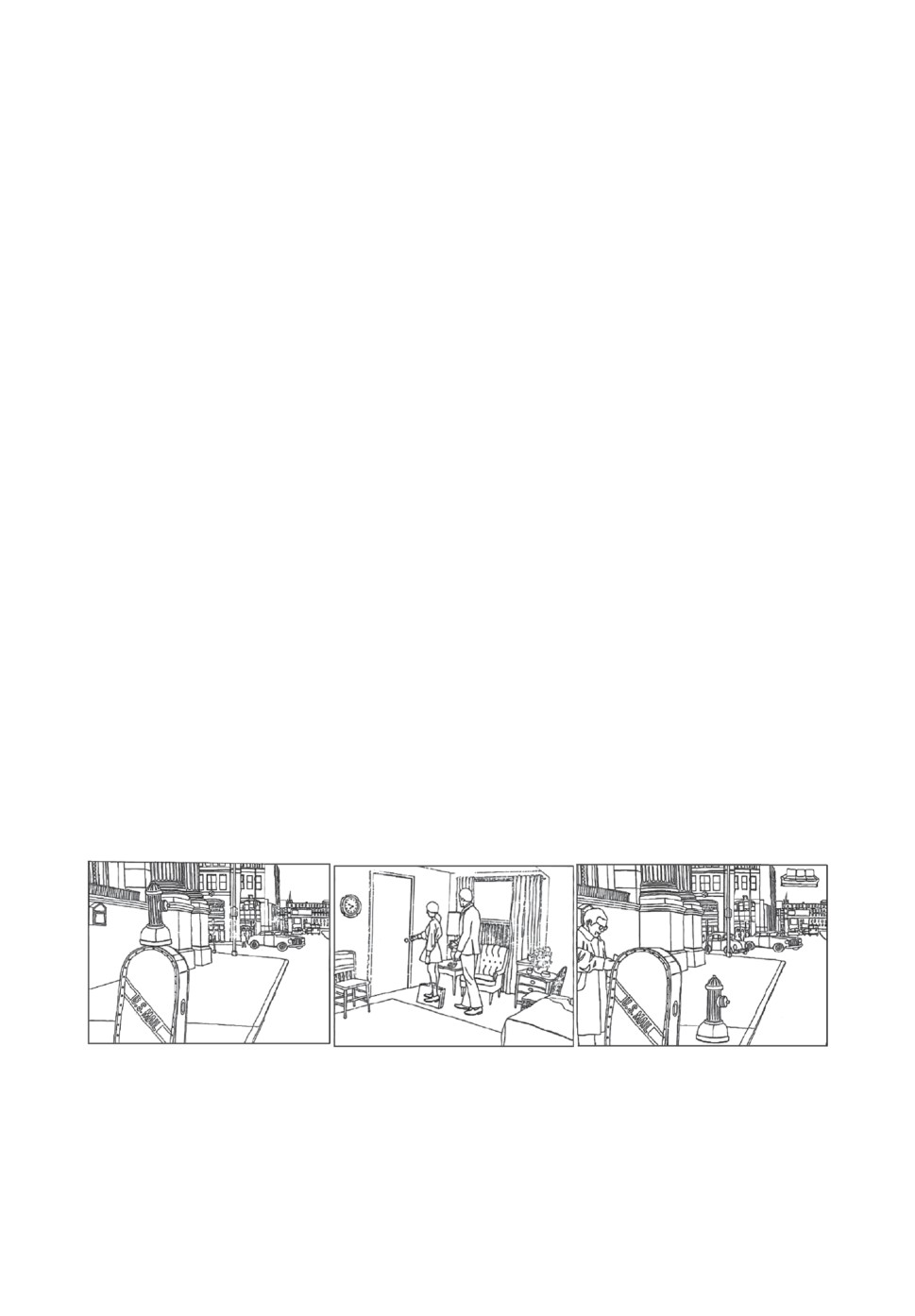
Рис. 3. Примеры нарушений ограничений Бидермана. Слева: Пожарный гид-
рант нарушает ограничения положения. По центру: Нарушение взаимного
расположения (портфель и ноги). Справа: Тройное нарушение: диван наруша-
ет ограничения опоры, вероятности появления и размера. Изображения взяты
из [7].
10
Наш жизненный опыт, все наши имеющиеся знания о мире помогают в рас-
познавании. Мы знаем, что трава растет из почвы и бывает в щелях между
плиток, но она не может расти из цельного цементного пола. Мы понима-
ем, что такое отражение в зеркалах или других поверхностях и картины на
стенах. Мы знаем, что обычно маленькие дети не гуляют без сопровождения
взрослых.
Пока неясно, как передать машине весь этот опыт. Однако на данном этапе
развития компьютерного зрения идея использовать максимально полное, т.е.
трехмерное визуальное представление сцены, кажется целесообразной. Поми-
мо решения некоторых прикладных задач, актуальных сейчас или в ближай-
шем будущем, развитие трехмерных методов распознавания может оказаться
необходимым шагом к решению проблемы понимания машиной окружающе-
го мира.
К наиболее популярным задачам трехмерного распознавания на данный
момент относятся:
• выделение ключевых точек и оценка положения (позиции, ракурса), на-
хождение соответствия между трехмерными объектами;
• классификация объектов и форм, экстракция признаков;
• генерация трехмерных объектов, форм (включая восстановление участ-
ков);
• распознавание и генерация лиц и тел людей, животных;
• обнаружение объектов;
• cегментация объектов или составных частей объектов.
Тем не менее при рассмотрении методов глубокого обучения сложно прове-
сти четкое разделение по задачам. В большинстве случаев ключевым элемен-
том для решения любой задачи является нейронная сеть-экстрактор призна-
ков, которая является основой модели и к которой добавляются различные
модули и ветви, использующие полученные признаки для решения целевых
задач — классификации, сегментации и других. Поэтому целесообразнее рас-
сматривать область трехмерного распознавания, не привязываясь к задачам.
3.1. Методы глубокого обучения в задачах трехмерного распознавания
В публикации [8] рассматриваются методы глубокого обучения для распо-
знавания облаков точек с 2015 по 2020 г. Авторы выделили несколько подхо-
дов и привели примеры популярных алгоритмов (рис. 4).
Авторы выделяют три свойства, присущих облакам точек: нерегулярность
(неравномерное распределение плотностей точек в объеме облака), неструк-
турированность (отсутствие какой-либо сетки, на которой лежат точки),
неупорядоченность (точки хранятся в каком-либо списке, и порядок их распо-
ложения в этом списке не имеет значения). Несколько лет назад эти свойства
не позволяли использовать методы глубокого обучения и особенно — свер-
точные нейронные сети, предназначенные для упорядоченных, регулярных
и структурированных данных, с облаками точек, поэтому в ранних иссле-
дованиях облака точек конвертировали в регулярные и структурированные
11
Deep Learning on 3D point cloud
structured grid based
Raw point cloud
Voxel
Multiview
Higher dimensional
PointNet
Local region computation
based
based
lattices
SplatNet
VoxNet
No local
VMCNN
Local correlation
correlation
VMCNN
SFCNN
MVCNN
PointNet++
PointCNN
Graph
NormalNet
based
SLCAE
VoxelNet
Pointweb
Kd-Network
MRCNN
GIFT
SO-Net
PointConv
DGCNN
ShapePFCN
Pointwise Conv
RS-CNN
LocalSpec
MV-
3D PointCapsNet
GeoCNN
SphericalProject
SPG
A-CNN
SSP + SPG
SpiderCNN
DPAM
PAT
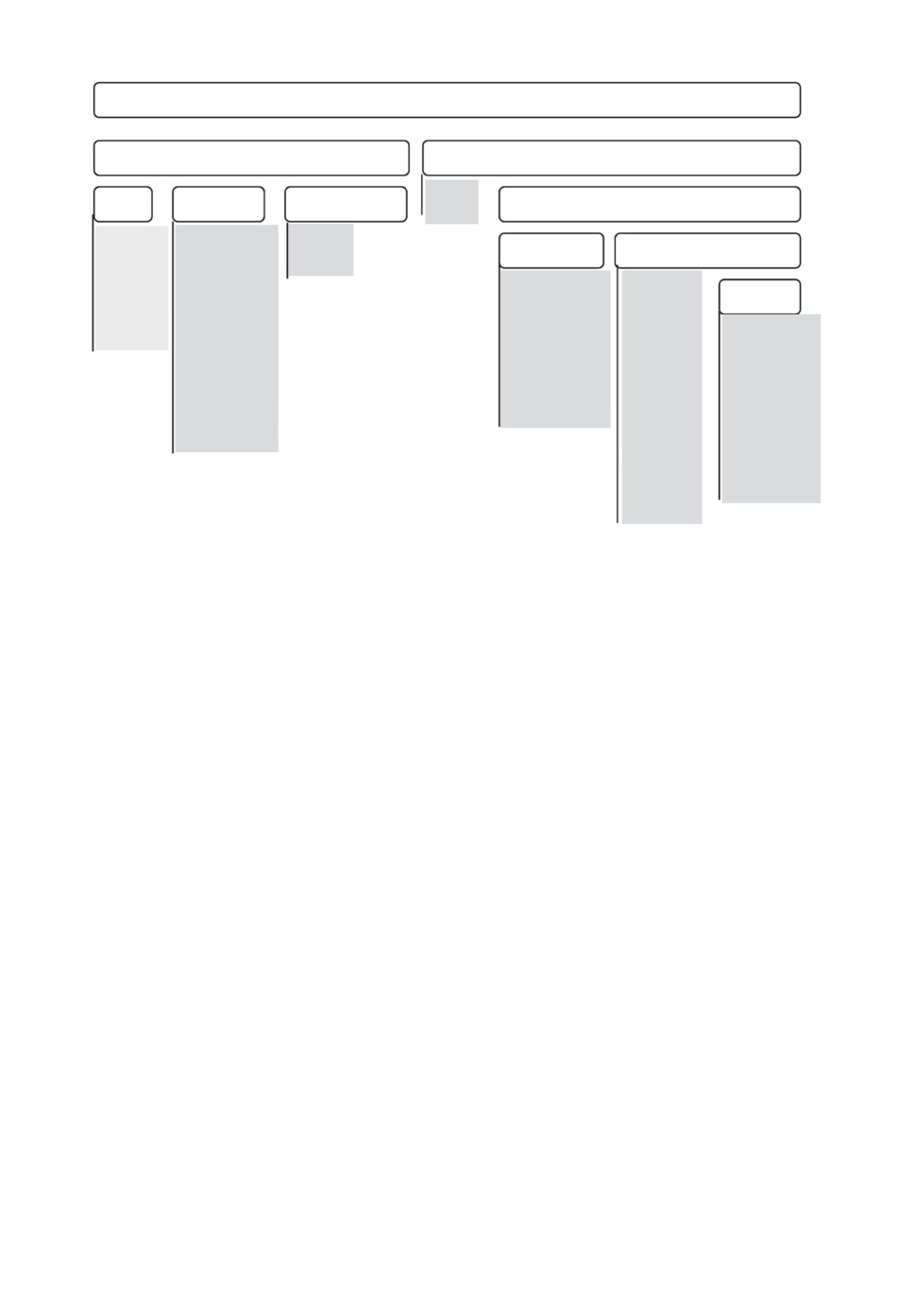
Рис. 4. В публикации [8] методы сначала разделяются на группы по типу
данных (трехмерных представлений), для которых они предназначены, затем
авторы выделяют более узкие группы методов на основе подходов, которые
они используют.
представления. Популярны следующие подходы: вокселизация, набор видов
с различных ракурсов, решетка более высокой размерности.
Вокселизация предполагает конвертирование облака точек в воксельную
сетку фиксированного размера. В таком случае можно построить нейронную
сеть, использующую трехмерные сверточные фильтры. Большое число пуб-
ликаций [9-14] использует данный подход, выполняя вокселизацию на эта-
пе предобработки. 3D ShapeNets [14] формирует воксельную сетку размером
30 × 30 × 30 вокселей; воксель имеет значение 1, если является частью объ-
екта, и 0, если находится снаружи объекта. Таким образом, объект можно
представить бинарным тензором. Однако проблемой воксельных представ-
лений является разреженность — когда объект занимает лишь малую часть
воксельной сетки, большая часть вычислений производится над пустыми об-
ластями, что крайне неэффективно. Более поздние публикации [15, 16] пред-
лагают решение этой проблемы путем использования октодеревьев — часто
используемой для разделения трехмерного пространства древовидной струк-
туры данных, в которой каждый воксель, являющийся кубом, может содер-
жать ровно восемь потомков-вокселей меньшего размера. Таким образом, об-
ласти, требующие более детальной обработки, могут быть помещены в более
мелкие ячейки-воксели.
Использование вместо облака точек набора изображений, полученных с
разных ракурсов, имеет ряд преимуществ: такой подход позволяет исполь-
зовать все техники, применяемые для распознавания двумерных изображе-
12
ний, а сами изображения не имеют артефактов (разрешение воксельной сет-
ки, как правило, довольно мало, что приводит к искажению оригиналь-
ной формы объекта). Первой публикацией в этом направлении является
MultiviewCNN [17], в которой предлагалось получать признаковое описание
для каждого изображения объекта с использованием сверточной сети, затем
агрегировать все признаковые описания операцией пулинга и применять еще
одну сверточную нейронную сеть для получения итогового вектора признаков
для классификации. Ряд работ продолжил направление [11, 18-23], исполь-
зуя все достижения глубокого обучения в обработке изображений, однако на
данный момент направление теряет актуальность в связи с развитием ме-
тодов, способных работать с трехмерными представлениями напрямую. Тем
не менее в 2020 г. была представлена работа [24], предлагающая алгоритм
сегментации полигональных сеток (мешей), основанный на мультиракурсном
подходе, для задачи семантической сегментации. Примечательно, что авто-
ры предлагают использовать не оригинальные кадры, полученные при фото-
графировании объекта или сцены с различных ракурсов, но синтетические
изображения с повышенным полем зрения, рендеры, полученные из построен-
ной трехмерной сцены. Авторы утверждают, что представленный алгоритм,
принимая на вход приблизительно 12 синтетических изображений, достига-
ет точности сегментации выше, чем другие существующие мультиракурсные
методы при использовании более тысячи изображений. При этом виртуаль-
ные ракурсы, используемые при получении таких изображений, могут быть
невозможными, например из-за стен при скрытии этих стен.
Идея подхода с решеткой более высокой размерности заключается в том,
чтобы преобразовать облако точек к структурированному представлению,
устойчивому к перестановкам, например к перестановочному многограннику.
Нейронная сеть SPLATNet (Sparse Lattice Networks for Point Cloud Processing)
[25] принимает на вход облако точек и предсказывает класс для каждой точ-
ки, т.е. выполняет семантическую сегментацию. Сеть строится на основе BCL
(bilateral convolutional layer) — билатеральных сверточных слоев. Принцип
BLC заключается в преобразовании входных признаков, соответствующих
точкам, к перестановочному многограннику и последующему выполнению
операции свертки с ядром, также являющимся перестановочным многогран-
ником. Метод SFCNN [26] адаптивно проецирует входное облако точек на
дискретизированную сферу, после чего применяет ряд сверточных операций
для извлечения локальных и глобальных признаков, которые затем агреги-
руются для получения итогового признакового представления. Сеть может
использоваться для классификации и сегментации.
В 2017 г. была представлена первая нейронная сеть для распознавания
облака точек — PointNet [27], работающая с облаками точек без какой-либо
их предобработки. Авторы выделяют три наиболее важных подхода, реали-
зованных в архитектуре PointNet:
1. Симметрическая функция для неупорядоченного входа, обеспечиваю-
щая инвариантность к перестановкам во входном облаке точек. Функ-
ция реализована в виде многослойного персептрона со слоем подвыбор-
ки по максимальному значению (max pooling);
13
2. Агрегация локальной и глобальной информации. В ветви сегментации
авторы совмещают выходной вектор глобальных признаков с набором
векторов признаков для каждой точки облака и получают выходной
вектор принадлежности для каждой точки, применяя набор многослой-
ных персептронов, что и является семантической сегментацией. Такой
подход позволил авторам успешно применять PointNet для задач сег-
ментации объектов в сцене и сегментации частей объектов;
3. Сеть выравнивания, обеспечивающая инвариантность к геометриче-
ским трансформациям облака путем приведения облака точек к кано-
нической форме перед извлечением признаков. Авторы использовали
малую нейронную сеть T-Net, которая предсказывает аффинное пре-
образование, необходимое для приведения облака точек к стандартной
форме. Сеть T-Net встроена в архитектуру PointNet, таким образом,
предсказанная трансформация сразу же применяется к облаку точек.
Такой же подход использован для приведения к канонической форме
не только облака точек, но и признаков, полученных из разных облаков
точек.
Однако в архитектуру PointNet не была заложена возможность находить
локальные структуры, учитывать локальные зависимости между точками.
Дальнейшие исследования были направлены на решение этой проблемы.
Метод PointNet++ [28] группирует локальные регионы и применяет на та-
ких группах PointNet, повторяя эту процедуру иерархическим образом. Ней-
ронная сеть VoxelNet [29] для обнаружения объектов принимает на вход об-
лако точек и преобразует его в воксельную сетку, т.е. точки группируются по
вокселям. Для каждой такой группы-вокселя вычисляется признаковое пред-
ставление, которое затем подается на вход сети предложения регионов для
получения обнаружений. В SO-Net [30] для уменьшения размерности началь-
ного облака точек строится самоорганизующаяся карта Кохонена с заданным
числом узлов, генерирующая узловые точки-центроиды. Затем для каждого
такого центроида выбирается заданное число точек-соседей, которые пода-
ются на вход сети-энкодера, на выходе которой получается глобальный век-
тор признаков для облака точек. В публикации [31] предлагается точечная
свертка (pointwise convolution). Для каждой точки облака определяются со-
седние точки, попадающие в трехмерное сверточное окно, которые, подобно
окружающим пикселям, подвергаются операции свертки вместе с рассмат-
риваемой точкой. Так строится полносверточная нейронная сеть, имеющая
на выходе вектор признаков для каждой точки. Работа [32] представляет
3DPointCapsNet, трехмерный автоэнкодер, учитывающий геометрические от-
ношения между частями объектов, что позволяет улучшить способности сети
к обучению и генерализации. Скрытое пространство, строящееся с приме-
нением капсульной динамической маршрутизации [33], параметризуется так
называемыми скрытыми капсулами (latent capsules) — набором признаков
заданного размера.
Часть работ не только группируют точки, но и исследуют корреляцию
между точками в локальных группах. Интуитивное допущение заключается в
14
Classification Network
input
mpl (64, 64)
feature
mlp (64, 128, 1024)
mpl
max
transform
transform
pool
(512, 256, k)
1024
shared
shared
n × 1024
global feature
k
output scores
point features
3 × 3
64 × 64
T-Net
trans-
T-Net
trans-
form
form
n × 1088
matrix
matrix
shared
shared
miltiply
miltiply
mlp (512, 256)
mlp (128, m)
Segmentation Network
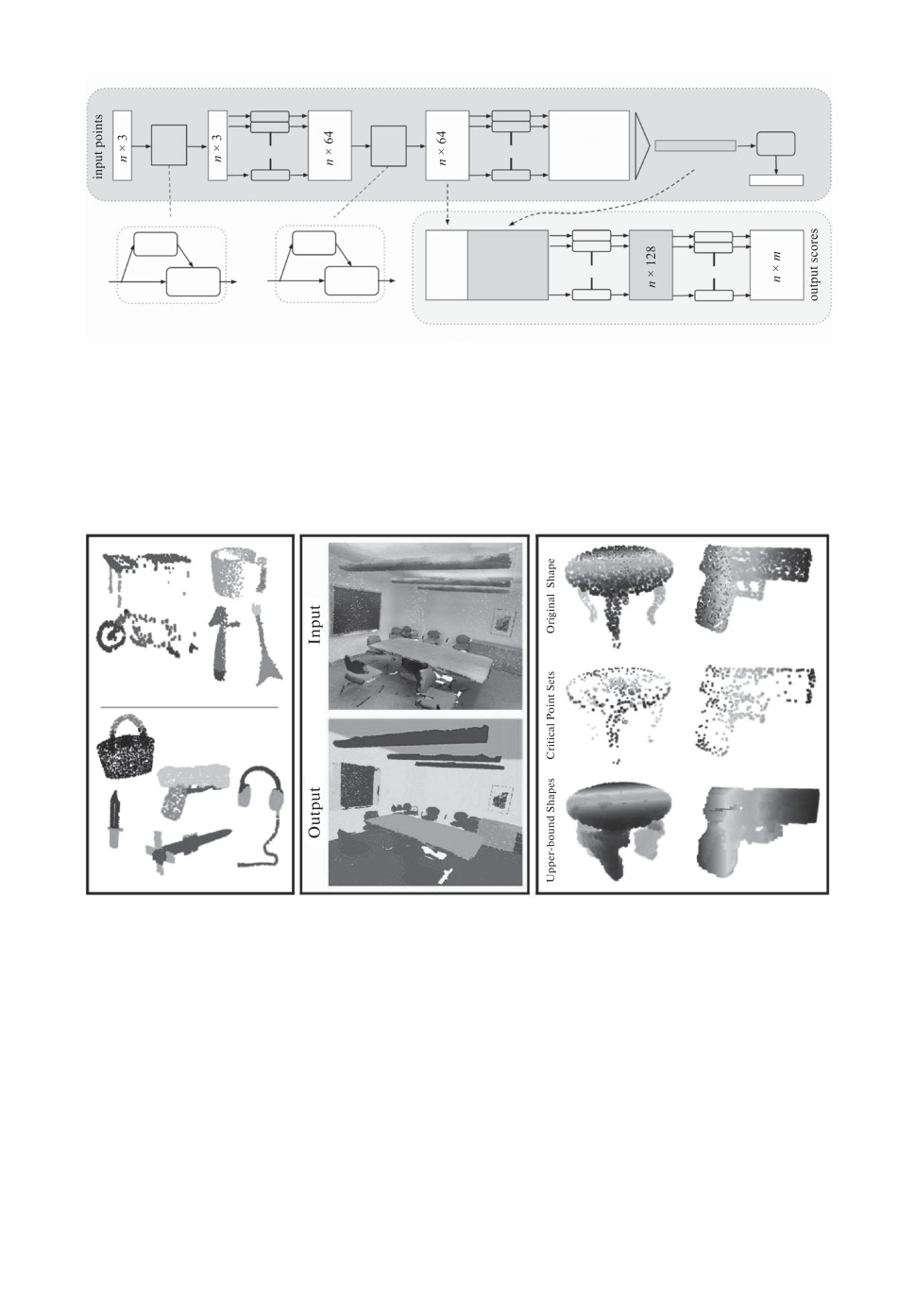
Рис. 5. Архитектура нейронной сети PointNet [27]. На вход подаются n то-
чек, представленных тремя координатами. В верхнем ряду показана основная
сеть-классификатор, а в нижнем ряду показана дополнительная ветвь для
семантической сегментации. Обозначение mlp подразумевает многослойный
персептрон (multi-layer perceptron), в скобках указаны размеры слоев.
table
mug
guitar
motorbike
Partial inputs
lamp
Complete inputs
bag
pistol
carphone
rocket
knife
Рис. 6. Результаты PointNet. Слева: Примеры классификации цельных объек-
тов и их частей. По центру: Пример семантической сегментации сцены. Спра-
ва: Для каждой формы объекта (верхний ряд) PointNet определяет набор клю-
чевых точек (средний ряд) так, что любое облако точек, находящееся между
набором ключевых точек и предельной формой (нижний ряд), имеет один и
тот же вектор глобальных признаков.
том, что точки не могут существовать в изоляции, их скопления отображают
какие-либо формы, которые можно анализировать. В [34] авторы замечают,
что операция свертки, выполненная напрямую над группой точек, не учиты-
вает взаиморасположения точек, формы их скученности, однако зависима от
порядка точек, который в облаках точек не имеет никакого значения. В ка-
15
честве решения этой проблемы предлагается использовать χ-преобразование
над координатами точек, реализованное в виде многослойного персептрона
и позволяющее одновременно взвесить и выполнить перестановку входных
точек. Объединяя χ-преобразование с последующей операцией свертки, по-
лучается χ-Conv, базовый блок предлагаемой нейронной сети PointCNN. Ра-
бота [35] представляет нейронную сеть Pointweb. Здесь предлагается новый
обучаемый блок AFA (Adaptive Feature Adjustment), получающий всевозмож-
ные пары точек в локальной группе и вычисляющий влияние точек друг на
друга, формируя векторы признаков, агрегирующих свойства всей группы
точек.
Предложено большое количество работ, исследующих различные вариан-
ты сверточных операций, учитывающих взаиморасположение точек и формы,
ими образуемые. В работе [36] предлагается вариант сверточной операции
для облака точек, PointConv. В отличие от обычных сверток с дискретными
ядрами (весами) PointConv предлагает обучаемую непрерывную функцию,
позволяющую получить вес для точки по ее положению. Кроме этого, пред-
полагается взвешивать точки оценками их обратных плотностей — таким об-
разом, вклад отдельных точек, составляющих плотную скученность, не будет
слишком велик. В нейронных сетях RS-CNN [37] и Geo-CNN [38] выполняет-
ся выборка равномерно распределенных точек из облака, каждая из которых
становится центроидом сферической области-соседства, однако рассматрива-
ются не сами точки соседства, а их положения относительно центроида (пред-
ставленные в виде векторов). Особенностью сверточной операции GeoConv,
из которой строится Geo-CNN, является проекция этих векторов на оси, т.е.
формирование ортогонального базиса. Признаки вычисляются по каждому
направлению, после чего агрегируются с учетом углов между вектором и
осями в единый итоговый вектор признаков точки локального региона. За-
тем признаки точек локального региона агрегируются с весами, зависящими
от положения точек относительно центроида и радиуса региона. Радиус ло-
кальных регионов растет по ходу сети. В [39] предлагаются кольцевые сверт-
ки, имеющие сферическую рецептивную область с концентрической сфери-
ческой полостью внутри (при проекции на плоскость принимающие форму
кольца). Авторы замечают, что в современных нейросетевых архитектурах
для устойчивости к изменению масштаба обычно объединяются разномас-
штабные признаки, что приводит к перекрытию рецептивных полей и много-
кратному попаданию признаков некоторых точек в расчет итогового вектора
признаков. Кольцевая свертка может состоять из нескольких концентриче-
ских колец — таким образом, можно получить разномасштабные признаки, не
переиспользуя одни и те же точки. Нейронная сеть SpiderCNN [40] для клас-
сификации и сегментации построена на основе сверточных слоев SpiderConv.
SpiderConv использует параметризованное семейство фильтров для выполне-
ния операции свертки. Фильтры являются композицией двух функций: про-
стой ступенчатой функции для захвата грубой геометрии и разложения Тей-
лора 3-го порядка для захвата более сложных структур.
16
Работа [41] представляет DPRNet, нейронную сеть для классификации и
сегментации, использующую разреженные свертки и остаточные соединения,
а вместо нормализации батча использует самонормализующуюся функцию
активации SELU (Scaled Exponential Linear Units) [42].
Работа [43] предлагает PATs (Point Attention Transformers) — нейронную
сеть-трансформер, предназначенную для работы с облаками точек. Ключе-
выми операциями PAT являются Group Shuffle Attention (GSA) и Gumbel
Subset Sampling (GSS). GSA является параметрически эффективной операци-
ей самовнимания для тренировки понимания отношений между точками. GSS
служит альтернативой операции сэмплирования по дальним точкам (Farthest
Point Sampling, FPS) и имеет несколько преимуществ: инвариантность к пе-
рестановкам, дифференцируемость, лучшая устойчивость к выбросам. PAT
предполагает возможность классификации и сегментации. В обоих случаях
результирующий вектор или набор векторов принадлежности к классам вы-
числяется с использованием многослойных персептронов. В [44] также пред-
лагаются операции сэмплирования с обучаемыми параметрами. Авторы заме-
чают, что несмотря на качественные результаты, получаемые при использова-
нии иерархических архитектур, сэмплирование и группировка точек в таких
методах производится в исходном Евклидовом пространстве фиксированным
способом, что может приводить к снижению робастности. Для решения этой
проблемы в работе предлагается модуль DPAM (Dynamic points agglomeration
module). Модуль строится на основе набора многослойных персептронов и
формирует обучаемую матрицу агломерации (agglomeration matrix), кото-
рая при умножении на облако точек или набор признаков снижает их раз-
мерность — т.е. является комплексом операций группировки и подвыборки
(пулинга).
В [45] предложен метод PointHop для классификации облака точек, об-
ладающий низкой вычислительной сложностью и обучающийся без учителя.
Метод представляет собой каскад одноименных модулей. Признаки со всех
модулей агрегируются в единый вектор для классификации методом опор-
ных векторов и случайного леса. Модуль PointHop формирует для каждой
точки облака локальный регион из k ближайших соседей, затем разбивает
регион на восемь областей-октантов, вычисляет признаки и конкатенирует
их с применением преобразования Saab (вариации метода главных компо-
нент) [46]. Работа получила продолжение в методе PointHop++ [47]. Авторы
оптимизировали модель, снизив число ее параметров, приведя ее к древовид-
ной форме и реализовав выбор отличительных признаков по энтропийному
критерию. Наконец, в 2021 г. была представлена модель R-PointHop [48] для
нахождения жесткой трансформации (поворот и смещение) между двумя об-
лаками точек, обеспечивающей оптимальное прилегание. Все методы группы
PointHop не являются методами глубокого обучения и используют обучение
без учителя, что дает возможность использовать их на мобильных и мало-
мощных вычислительных платформах. Еще одним методом, использующим
обучение без учителя, является метод, представленный в [49]. Предлагаемая
нейронная сеть извлекает из облака ключевые (структурные) точки и позво-
17
ляет решать задачи сопоставления форм облаков точек и переноса сегмен-
тационной разметки и потенциально — задачи реконструкции и дополнения
формы.
Подход, основанный на графах, рассматривает облако точек как граф, уз-
лами которого являются точки. Ребра графа отображают корреляцию между
точками. Работа [50] 2017 г. представляет нейронную сеть Kd-network, пред-
ставляющую облако точек в виде k-d-дерева (k-мерного дерева), листьями
которого являются точки облака (их координаты), а векторное представление
каждого нелистового узла рассчитывается как нелинейная функция от аф-
финного преобразования с обучаемыми параметрами, примененного к двум
узлам-соседям рассматриваемого нелистового узла. После обработки корне-
вого узла получается вектор признаков всего облака точек. Работа [51] пред-
ставляет модуль EdgeConv, генерирующий вектор признаков для точки с уче-
том ее соседства, представляющего направленный граф. В модуле попарно
вычисляются ребра между точкой-центроидом и ее соседями с применением
полносвязного слоя, называемые ребровыми признаками (edge features). Вы-
ход модуля EdgeConv получается путем применения операции пулинга к реб-
ровым признакам. Особенностью такого подхода является то, что ребровые
признаки зависят не только от взаимного расположения точек, но и от ребро-
вых признаков, полученных с предыдущего слоя EdgeConv. Таким образом,
используемые графы являются динамическими. В работе [52] предлагаются
спектральные свертки, собственная операция подвыборки (пулинга) и ней-
росетевая архитектура для классификации и сегментации, построенная на
их основе. В модуле спектральной свертки точки соседства являются узлами
графа, а длины ребер вычисляются как расстояния между точками в про-
странстве признаков и формируют матрицу смежности, по которой вычис-
ляется спектр графа. Далее выполняются преобразование Фурье для графа,
спектральная фильтрация и, наконец, обратное преобразование Фурье. Мо-
дуль рекурсивного кластерного пулинга итеративно выполняет спектральную
кластеризацию и пулинг таким образом, чтобы каждый кластер участвовал в
формировании итогового набора векторов признаков. Авторы предполагают,
что, в отличие от популярного максимального пулинга, такой способ позво-
лит лучше сохранить полезную информацию. Работа [53] предлагает модель
Point2Node для семантической сегментации, ключевой особенностью которой
является возможность использовать корреляцию не только точек-соседей, но
и любых точек модели. Граф строится из многомерных узлов, получаемых
из входных точек облака с использованием сверток χ-Conv, предложенных
в [34]. Далее модуль динамической корреляции узлов DNC (Dynamic Node
Correlation) представляет каждый узел в трех вариантах — с учетом авто-
корреляции (между каналами вектора признаков узла), локальной (между
узлами локальной группы) и нелокальной корреляции (между взаимоуда-
ленными узлами). Используется адаптивный обучаемый модуль агрегации
разноуровневых признаков. Работа [54] предлагает разделять облако точек
на так называемые суперточки, superpoints — простые семантически гомо-
генные геометрические формы. Для каждой суперточки формируется век-
тор признаков с использованием модели PointNet [27], и полученные векторы
18
формируют граф Superpoint Graph (SPG). Такой подход позволяет значи-
тельно снижать размер входного облака точек, сохраняя важные признаки,
и может быть использован на очень крупных облаках точек. В последующей
работе [55] рассматривается случай, при котором геометрически гомогенный
регион не является семантически гомогенным, и предлагается дополнительно
сегментировать суперточки на более мелкие регионы. В работе [56] предлага-
ется новая сверточная операция Graph Attention Convolution (GAC), динами-
чески определяющая вес каждой точки в локальной группе. Это позволяет
фокусироваться на более важных элементах локальной группы и исключать
элементы, относящиеся к другому семантическому классу. Нейронная сеть
3D Graph Convolution Network (3D-GCN), предложенная в [57], использует
сверточные модули, в которых ядро, являющееся графом и представляющее
набор точек локальной группы, имеет не только настраиваемые в процессе
обучения веса, но и форму, т.е. положение самих точек. Косинусное расстоя-
ние, используемое для определения схожести входных данных и сверточного
ядра, не зависит от длины векторов и обеспечивает инвариантность к мас-
штабу.
В 2021 г. была представлена работа [58], в которой предлагалось группи-
ровать точки не в локальные группы, а по кривым, т.е. цепочкам точек, скла-
дывающихся в ломаную линию. При использовании локальных групп схожее
распределение точек в группах приводит к получению схожих признаков, что
не позволяет разделять регионы. Кривые же хорошо отображают геометри-
ческую форму, позволяя строить более различимые признаки. Модуль по-
строения кривой (криволинейной агрегации) является обучаемым — каждая
следующая точка выбирается как точка из локальной группы, обладающая
наибольшей численной оценкой, полученной с использованием многослойных
персептронов. Нейронная сеть СurveNet, использующая такой подход, позво-
ляет выполнить классификацию и сегментацию облака точек.
В 2019 г. был представлен первый нейросетевой алгоритм, работающий с
треугольными полигональными сетками (polygon mesh, меш) — MeshNet [59].
Входная полигональная сетка рассматривалась как набор элементов-граней.
Каждая грань описывалась следующим набором параметров: координаты
центра грани, векторы вершин грани, проведенные из центра грани, нор-
мальный вектор единичной длины, индексы сопряженных граней. Парамет-
ры обрабатываются в блоках structural descriptor (структурный дескриптор)
и spatial descriptor (пространственный дескриптор), получающих первичные
структурные и пространственные признаки соответственно. Признаки затем
проходят через сверточные блоки для полигональных сеток (блоки mesh
convolution). Наконец, путем агрегирования и подвыборки признаков полу-
чается итоговый глобальный вектор признаков, который может быть исполь-
зован для различных задач, в том числе классификации.
В [60] предлагается трансформировать меш в трехмерную сетку, содержа-
щую в ячейках векторы кривизны, и подавать эту сетку на вход представ-
ленной сверточной нейронной сети CurveNet (не путать с CurveNet из [58]).
LaplacianNet [61] (the Laplacian Encoding and Pooling Network) принимает в
19
Local aggregation
Non-local aggregation
Curve aggregation (uors)
Curve grouping process
S2
S2
f(a)
2
Si1
S1
S1
f(a)1
Ns
f = softmax
Eq. 5.
Si1
Si1
S
i
1
Si1
Si
Si
Si
Si
S3
Eq. 3.
S3
f(a)3
S5
f = argmax
S
5
f(a)5
S4
one-hot
S4
f(a)4
Рис. 7. Сверху: Способы группировки: локальные группы, нелокальная агре-
гация и криволинейная агрегация. Внизу: Иллюстрация процесса построения
кривой в работе [58].
Structural Descriptor
Neignbor
Face Kernel
Spatial Descriptor
Index
Correlation
MLP
(131, 131)
MLP (64, 64)
Normal
Center
Face Rotate
Corner
Convolution
Global Feature
MLP
MLP
Spatial
(1024)
(1024)
Center
Descriptor
Pooling
Mesh
Mesh
Center
Conv
Conv
Structural
Descriptor
Normal
Neighbor
n
3
Index
Output Scores
Рис. 8. Архитектура MeshNet [59].
качестве входных данных вершины и нормали полигональной сетки, а также
собственные векторы и кластеры, полученные методом спектральной класте-
ризации. Нейронная сеть состоит из двух блоков MPB (Mesh Pooling Block)
для анализа данных в различном разрешении и формирования признаков для
каждой вершины, после чего эти признаки используются в сети сегментации
20
или классификации в зависимости от задачи. Начальное формирование кла-
стеров (аналог суперпикселей для изображений) в качестве локальных групп
и варьирование размера кластеров от мелкого (детального) до крупного (гру-
бого) позволяет обрабатывать полигональные сетки иерархически. Нейрон-
ная сеть MeshWalker [62] принимает на вход цепочку-путь, составленную слу-
чайным образом из вершин полигональной сетки объемом 40% от их общего
числа. Сеть содержит рекуррентные слои для агрегации информации по все-
му пути. Преимуществом MeshWalker является возможность получения каче-
ственного результата даже при малом объеме обучающих данных. Работа [63]
предлагает сверточный слой LRFConv (Local reference Frame Convolution) с
пропускным соединением. В LRFConv для каждой обрабатываемой точки
трехмерной модели, представленной ее координатами и вектором нормали,
определяется группа точек-соседей по геодезическим дистанциям. Коорди-
наты соседей пересчитываются относительно точки-центроида, вместе с ди-
станциями поступают на вход многослойным персептронам для приведения
к требуемой размерности, конкатенируются с признаками предыдущего слоя
и поступают на вход непрерывной свертки.
Авторы работы [64] замечают, что современные подходы к сегментации
трехмерных форм (объектов) зависят от качества и объeма размеченных на-
боров обучающих данных, и представляют алгоритм ROSS, требующий лишь
один размеченный пример для обучения. ROSS обучается переносить размет-
ку с примера на схожие входные данные.
Также происходит развитие и в направлении генеративных методов. TM-
Net [65] является сетью для генерации текстурированных полигональных се-
ток и состоит из трех основных частей: TextureVAE, PixelSNAIL и PartVAE.
Каждая из частей строится на основе двух вариационных автоэнкодеров.
PartVAE генерирует геометрию объекта, TextureVAE — текстуру, PixelSNAIL
обеспечивает соответствие результирующей текстуры сгенерированной гео-
метрии.
4. Заключение
Несмотря на значительное развитие методов глубокого обучения, в том
числе для двумерных изображений, в области трехмерного распознавания их
применение было затруднено до недавнего времени. Облака точек, достаточ-
но легко получаемые с различных датчиков или набора изображений объекта
или сцены, используются во многих системах технического зрения, однако их
нерегулярность, неструктурированность и неупорядоченность вносили слож-
ности в разработку нейросетевых решений. Ранние методы предполагали кон-
вертацию облаков точек в регулярные и структурированные представления:
воксельные сетки, решетки более высокой размерности, набор изображений
с различных ракурсов.
В 2017 г. была представлена PointNet — первая нейронная сеть, рабо-
тающая с облаками точек напрямую и решающая задачи классификации и
сегментации облака точек. Однако нейронная сеть не учитывала локальные
21
зависимости между точками, и дальнейшие исследования области были на-
правлены на решение этой проблемы. В настоящий момент имеется большое
количество подходов и техник, с успехом примененных в области трехмерного
распознавания облаков точек: рассмотрение облака точек как графа, супер-
точки (superpoints), сверточные ядра с настраиваемыми весами и формой,
использование локального ортогонального базиса, обучаемые непрерывные
функции в качестве сверточных ядер и т.д.
С развитием методов глубокого обучения для облаков точек методы, ис-
пользующие воксельные представления, стали менее популярны. Причиной
этого служат высокие требования к вычислительным ресурсам: из-за раз-
реженности воксельной сетки большая часть операций происходит в пустых
областях, в результате чего разрешение воксельной сетки сильно ограничено
и не позволяет качественно представить крупные сцены или объекты со мно-
жеством мелких деталей. Однако воксельные представления остаются попу-
лярными в области медицинских задач, связанных с распознаванием радио-
логических снимков, из-за особенностей сканирования.
Методы, использующие наборы изображений с различных ракурсов для
трехмерного распознавания (как правило, сегментации), также теряют попу-
лярность и, как правило, проигрывают в точности методам, использующим
другие типы представлений. Тем не менее недавняя работа [24] показала,
что данное направление имеет перспективы, однако предложенный алгоритм
предполагал использование не оригинальных изображений, а рендеров, вы-
полненных по построенной трехмерной модели.
В 2019 г. были впервые представлены нейросетевые алгоритмы, работаю-
щие с полигональными сетками (мешами). Преимуществами мешей являются
наличие информации о поверхности и связность элементов. Данное направле-
ние позволяет как использовать достижения в распознавании облаков точек,
рассматривая меш как набор вершин сетки с дополнительной информацией:
векторами нормалей, сопряженными вершинами и т.д., так и применить но-
вые подходы: формировать сетку векторов кривизны или цепочку-путь по
мешу в качестве входных данных, использовать геодезические дистанции и
др. На данный момент не удалось заметить какие-либо устоявшиеся практики
в этом направлении.
Таким образом, современное состояние области трехмерного распознава-
ния позволяет работать с любыми популярными трехмерными представле-
ниями — облаком точек, воксельной сеткой, полигональной сеткой, а также с
набором мультиракурсных изображений, однако наибольший прогресс и ак-
тивность прослеживаются в исследованиях, касающихся облаков точек.
СПИСОК ЛИТЕРАТУРЫ
1. COLMAP Project Page on Github.io - Main Page. [Электронный ресурс] URL:
2. COLMAP Project Page on Github.io - Datasets. [Электронный ресурс] URL:
22
3.
Pérez P., Iván R. Blurring the Boundaries Between Real and Artificial in Architec-
ture and Urban Design through the Use Artificial Intelligence: PhD thesis. Univer-
sidade da Coruna, 2017. P. 1-300.
4.
Neubauer W., Doneus M., Studnicka N., Riegl J. Combined High Resolution Laser
Scanning and Photogrammetrical Socumentation of the Pyramids at Giza // CIPA
XX Int. Sympos. Citeseer. 2005. P. 470-475.
5.
McCarthy J.K., Benjamin J., Winton T., van Duivenvoorde W. 3D Recording and
Interpretation for Maritime Archaeology. Springer Nature, 2019.
6.
Hoiem D., Savarese S. Representations and Techniques for 3D Object Recognition
and Scene Interpretation // Synthesis Lectures on Artificial Intelligence and Machine
Learning. 2011. V. 5. No. 5. P. 1-169.
7.
Biederman I. On the Semantics of a Glance at a Scene // Perceptual Organization.
1981. V. 213. P. 253.
8.
Bello S.A., Yu S., Wang C., Adam J.M., Li J. Deep Learning on 3D Point Clouds //
Remote Sensing. 2020. V. 12. No. 11. P. 1729.
9.
Maturana D., Scherer S. 3D Convolutional Neural Networks for Landing Zone De-
tection from Lidar // IEEE ICRA. IEEE. 2015. P. 3471-3478.
10.
Maturana D., Scherer S. Voxnet: a 3D Convolutional Neural Network for Real-Time
Object Recognition // IEEE/RSJ IROS. IEEE. 2015. P. 922-928.
11.
Qi C.R., Su H., Nießner M., Dai A., Yan M., Guibas L.J. Volumetric and Multi-
View CNNs for Object Classification on 3D Data // Proc. CVPR. 2016. P. 5648-
5656.
12.
Wang C., Cheng M., Sohel F., Bennamoun M., Li J. NormalNet: a Voxel-Based
CNN for 3D Object Classification and Retrieval // Neurocomputing. 2019. V. 323.
P. 139-147.
13.
Ghadai S., Lee X., Balu A., Sarkar S., Krishnamurthy A. Multi-Resolution 3D Con-
volutional Neural Networks for Object Recognition // arXiv preprint: 1805.12254.
2018.
14.
Wu Z., Song S., Khosla A., Yu F., Zhang L., Tang X., Xiao J. 3D ShapeNets: a
Deep Representation for Volumetric Shapes // Proc. CVPR. 2015. V. 1912-1920.
15.
Riegler G., Osman Ulusoy A., Geiger A. Octnet: Learning Deep 3D Representations
at High Resolutions // Proc. CVPR. 2017. P. 3577-3586.
16.
Tatarchenko M., Dosovitskiy A., Brox T. Octree Generating Networks: Efficient
Convolutional Architectures for High-Resolution 3D Outputs // Proc. IEEE Int.
Conf. on Computer Vision. 2017. P. 2088-2096.
17.
Su Hang, Maji S., Kalogerakis E., Learned-Miller E. Multi-View Convolutional Neu-
ral Networks for 3D Shape Recognition // Proc. IEEE Int. Conf. on Computer
Vision. 2015. P. 945-953.
18.
Leng B., Guo S., Zhang X., Xiong Z. 3D Object Retrieval with Stacked Local Con-
volutional Autoencoder // Signal Processing. 2015. V. 112. P. 119-128.
19.
Bai S., Bai X., Zhou Z., Zhang Z., Jan Latecki L. Gift: a Real-Time and Scalable
3D Shape Search Engine // Proc. CVPR. 2016. P. 5023-5032.
20.
Kalogerakis E., Averkiou M., Maji S., Chaudhuri S. 3D Shape Segmentation with
Projective Convolutional Networks // Proc. CVPR. 2017. P. 3779-3788.
21.
Cao Z., Huang Q., Karthik R. 3D Object Classification via Spherical Projections //
2017 Int. Conf. on 3D Vision (3DV). IEEE. 2017. P. 566-574.
23
22.
Zhang L., Sun J., Zheng Q. 3D Point Cloud Recognition Based on a Multi-View
Convolutional Neural Network // Sensors. 2018. V. 18. No. 11. P. 3681.
23.
Kanezaki A., Matsushita Y., Nishida Y. RotationNet: Joint Object Categoriza-
tion and Pose Estimation Using Multiviews from Unsupervised Viewpoints // Proc.
CVPR. 2018. P. 5010-5019.
24.
Kundu A., Yin X., Fathi A., Ross D., Brewington B., Funkhouser T., Pantofaru C.
Virtual Multi-View Fusion for 3D Semantic Segmentation // Eur. Conf. on Com-
puter Vision (ECCV). Springer. 2020. P. 518-535.
25.
Su H., Jampani V., Sun D., Maji S., Kalogerakis E., Yang M.-H., Kautz J. Splat-
net: Sparse Lattice Networks for Point Cloud Processing // Proc. CVPR. 2018.
P. 2530-2539.
26.
Rao Y., Lu J., Zhou J. Spherical Fractal Convolutional Neural Networks for Point
Cloud Recognition // Proc. CVPR. 2019. P. 452-460.
27.
Qi C.R., Su H., Mo K., Guibas L.J. Pointnet: Deep Learning on Point Sets for 3D
Classification and Segmentation // Proc. CVPR. 2017. P. 652-660.
28.
Qi C.R., Yi L., Su H., Guibas L.J. Pointnet++: Deep Hierarchical Feature Learning
on Point Sets in a Metric Space // arXiv preprint: 1706.02413. 2017.
29.
Zhou Y., Tuzel O. Voxelnet: End-to-End Learning for Point Cloud Based 3D Object
Detection // Proc. CVPR. 2018. P. 4490-4499.
30.
Li J., Chen B.M., Lee G.H. So-Net: Self-Organizing Network for Point Cloud Anal-
ysis // Proc. CVPR. 2018. P. 9397-9406.
31.
Hua B.-S., Tran M.-K., Yeung S.-K. Pointwise Convolutional Neural Networks //
Proc. CVPR. 2018. P. 984-993.
32.
Zhao Y., Birdal T., Deng H., Tombari F. 3D Point Capsule Networks // Proc.
CVPR. 2019. P. 1009-1018.
33.
Sabour S., Frosst N., Hinton G.E. Dynamic Routing Between Capsules // arXiv
preprint:1710.09829. 2017.
34.
Li Y., Bu R., Sun M., Wu W., Di X., Chen B. PointCNN: Convolution on χ-Trans-
formed Points // arXiv preprint:1801.07791. 2018.
35.
Zhao H., Jiang L., Fu C.-W., Jia J. Pointweb: Enhancing Local Neighborhood
Features for Point Cloud Processing // Proc. CVPR. 2019. P. 5565-5573.
36.
Wu W., Qi Z., Fuxin L. PointConv: Deep Convolutional Networks on 3D Point
Clouds // Proc. CVPR. 2019. P. 9621-9630.
37.
Liu Y., Fan B., Xiang S., Pan C. Relation-Shape Convolutional Neural Network for
Point Cloud Analysis // Proc. CVPR. 2019. P. 8895-8904.
38.
Lan S., Yu R., Yu G., Davis L.S. Modeling Local Geometric Structure of 3D Point
Clouds Using Geo-CNN // Proc. CVPR. 2019. P. 998-1008.
39.
Komarichev A., Zhong Z., Hua J. A-CNN: Annularly Convolutional Neural Networks
on Point Clouds // Proc. CVPR. 2019. P. 7421-7430.
40.
Xu Y., Fan T., Xu M., Zeng L., Qiao Y. Spidercnn: Deep Learning on Point Sets
with Parameterized Convolutional Filters // Proc. ECCV. 2018. P. 87-102.
41.
Arshad S., Shahzad M., Riaz Q., Fraz M.M. DPRNet: Deep 3D Point Based Residual
Network for Semantic Segmentation and Classification of 3D Point Clouds // IEEE
Access. 2019. V. 7. P. 68892-68904.
42.
Klambauer G., Unterthiner T., Mayr A., Hochreiter S. Self-Normalizing Neural Net-
works // arXiv preprint: 1706.02515. 2017.
24
43.
Yang J., Zhang Q., Ni B., Li L., Liu J., Zhou M., Tian Q. Modeling Point Clouds
With Self-Attention and Gumbel Subset Sampling // Proc. CVPR. 2019. P. 3323-
3332.
44.
Liu J., Ni B., Li C., Yang J., Tian Q. Dynamic Points Agglomeration for Hierar-
chical Point Sets Learning // Proc. CVPR. 2019. P. 7546-7555.
45.
Zhang M., You H., Kadam P., Liu S., Kuo C.-C.J. Pointhop: an Explainable Ma-
chine Learning Method for Point Cloud Classification // IEEE Trans. Multimedia.
2020. V. 22. No. 7. P. 1744-1755.
46.
Kuo C.-C.J., Zhang M., Li S., Duan J., Chen Y. Interpretable Convolutional Neural
Networks via Feedforward Design // J. Visual Communication and Image Represen-
tation. 2019. V. 60. P. 346-359.
47.
Zhang M., Wang Y., Kadam P., Liu S., Kuo C.-C.J. Pointhop++: a Lightweight
Learning Model on Point Sets for 3D Classification // IEEE Int. Conf. on Image
Processing (ICIP). IEEE. 2020. P. 3319-3323.
48.
Kadam P., Zhang M., Liu S., Kuo C.-C.J. R-PointHop: a Green, Accurate and
Unsupervised Point Cloud Registration Method // arXiv preprint: 2103.08129. 2021.
49.
Chen N., Liu L., Cui Z., Chen R., Ceylan D., Tu C., Wang W. Unsupervised
Learning of Intrinsic Structural Representation Points // Proc. CVPR. 2020.
P. 9121-9130.
50.
Klokov R., Lempitsky V. Escape from Cells: Deep Kd-Networks for the Recognition
of 3D Point Cloud Models // Proc. IEEE Int. Conf. on Computer Vision. 2017.
P. 863-872.
51.
Wang Y., Sun Y., Liu Z., Sarma S.E., Bronstein M.M. Solomon J.M. Dynamic
Graph CNN for Learning on Point Clouds // ACM Trans. Graphics (TOG). 2019.
V. 38. No. 5. P. 1-12.
52.
Wang C., Samari B., Siddiqi K. Local Spectral Graph Convolution for Point Set
Feature Learning // Proc. ECCV. 2018. P. 52-66.
53.
Han W., Wen C., Wang C., Li X., Li Q. Point2Node: Correlation Learning of
Dynamic-Node for Point Cloud Feature Modeling // Proc. AAAI Conf. on Artificial
Intelligence. V. 34. 2020. P. 10925-10932.
54.
Landrieu L., Simonovsky M. Large-Scale Point Cloud Semantic Segmentation with
Superpoint Graphs // Proc. CVPR. 2018. P. 4558-4567.
55.
Landrieu L., Boussaha M. Point Cloud Oversegmentation with Graph-Structured
Deep Metric Learning // Proc. CVPR. 2019. P. 7440-7449.
56.
Wang L., Huang Y., Hou Y., Zhang S., Shan J. Graph Attention Convolution for
Point Cloud Semantic Segmentation // Proc. CVPR. 2019. P. 10296-10305.
57.
Lin Z.-H., Huang S.-Y., Wang Y.-C.F. Convolution in the Cloud: Learning De-
formable Kernels in 3D Graph Convolution Networks for Point Cloud Analysis //
Proc. CVPR. 2020. P. 1800-1809.
58.
Xiang T., Zhang C., Song Y., Yu J., Cai W. Walk in the Cloud: Learning Curves
for Point Clouds Shape Analysis // arXiv preprint: 2105.01288. 2021.
59.
Feng Y., Feng Y., You H., Zhao X., Gao Y. MeshNet: Mesh Neural Network for 3D
Shape Representation // Proc. AAAI Conf. on Artificial Intelligence. V. 33. 2019.
P. 8279-8286.
60.
Muzahid A., Wan W., Sohel F., Wu L., Hou L. CurveNet: Curvature-Based Mul-
titask Learning Deep Networks for 3D Object Recognition // IEEE/CAA J. Auto-
matica Sinica. 2020. V. 8. No. 6. P. 1177-1187.
25
61. Qiao Y.-L., Gao L., Rosin P., Lai Y.-K., Chen X. Learning on 3D Meshes with
Laplacian Encoding and Pooling // IEEE Trans. Visualization and Computer
Graphics. 2020.
62. Lahav A., Tal A. MeshWalker: Deep Mesh Understanding by Random Walks //
ACM Trans. Graphics (TOG). 2020. V. 39. No. 6. P. 1-13.
63. Yang Z., Litany O., Birdal T., Sridhar S., Guibas L. Continuous Geodesic Convo-
lutions for Learning on 3D Shapes // Proc. IEEE/CVF Winter Conf. on Appl. of
Computer Vision. 2021. P. 134-144.
64. Yuan S., Fang Y. Ross: Robust Learning of One-Shot 3D Shape Segmentation //
Proc. IEEE/CVF Winter Conf. on Appl. of Computer Vision. 2020. P. 1961-1969.
65. Gao L., Wu T., Yuan Y.-J., Lin M.-X., Lai Y.-K., Zhang H. TM-Net: Deep Gen-
erative Networks for Textured Meshes // arXiv preprint: 2010.06217. 2020
Статья представлена к публикации членом редколлегии Д.В. Виноградовым.
Поступила в редакцию 09.08.2021
После доработки 27.12.2021
Принята к публикации 30.12.2021
26