Автоматика и телемеханика, № 4, 2022
Робастное, адаптивное и сетевое
управление
© 2022 г. Ю.В. МИТРИШКИН, д-р техн. наук (yvm@mail.ru)
(Московский государственный университет им. М.В. Ломоносова;
Институт проблем управления им. В.А. Трапезникова РАН, Москва),
П.С. КОРЕНЕВ (pkorenev92@mail.ru),
А.Е. КОНЬКОВ (konkov@physics.msu.ru),
Н.М. КАРЦЕВ, канд. техн. наук (n.kartsev@yandex.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
ПОДАВЛЕНИЕ СМЕЩЕНИЙ ПЛАЗМЫ ПО ВЕРТИКАЛИ
СИСТЕМОЙ УПРАВЛЕНИЯ НЕУСТОЙЧИВЫМ ВЕРТИКАЛЬНЫМ
ПОЛОЖЕНИЕМ ПЛАЗМЫ В D-ОБРАЗНОМ ТОКАМАКЕ1
Обеспечение устойчивости вертикального положения плазмы является
первостепенной задачей магнитного управления для современных D-об-
разных токамаков. Введение дополнительной катушки горизонтального
поля, расположенной вблизи вакуумной камеры, обеспечивает более чем
на порядок больший размер области управляемости по вертикали, чем
использование пары катушек полоидального поля Р6 & Р12 в проекте то-
камака ИГНИТОР. Синтезированы две робастные системы управления
вертикальным положением плазмы: методом H∞-теории оптимизации и
посредством настройки ПИД-регуляторов в каскадной системе методом
линейных матричных неравенств. Результаты математического модели-
рования систем управления показывают, что модернизация полоидаль-
ной системы проекта токамака ИГНИТОР приводит к повышению запа-
са устойчивости системы управления вертикальным положением плазмы,
качества управления при парировании возмущений и надежности тока-
мака.
Ключевые слова: плазма, D-образный токамак, ИГНИТОР, вертикаль-
ная неустойчивость плазмы, область управляемости, H∞- и LMI-системы
управления.
DOI: 10.31857/S0005231022040067, EDN: AAYAUJ
1. Введение
Управляемый термоядерный синтез — это наиболее перспективный ис-
точник энергии будущего. Физические условия для его осуществления мо-
гут быть достигнуты в специальных установках — токамаках, позволяющих
1 Работа выполнена при финансовой поддержке Российского научного фонда (про-
ект № 21-79-20180), Российского фонда фундаментальных исследований (проект № 19-31-
90136), а также частично финансировалась АО «ГНЦ РФ ТРИНИТИ», г. Троицк.
100
удерживать высокотемпературную плазму в магнитном поле и представляю-
щих собой тороидальную аксиально-симметричную магнитную конфигура-
цию, создаваемую катушками тороидального и полоидального полей.
Современные D-образные токамаки с вытянутым по вертикали попереч-
ным сечением [1] обеспечивают повышенное давление плазмы при том же то-
роидальном магнитном поле по сравнению с первым поколением токамаков с
круглым вертикальным сечением. При максимальном использовании объема
токамака, т.е., при приближении границы плазмы к первой стенке, удается
получить плазму с наилучшими параметрами. Однако вытянутое по верти-
кали сечение плазмы приводит к неустойчивости положения плазмы в вер-
тикальном направлении и в связи с этим к повышенной опасности соприкос-
новения плазмы с элементами конструкции установки, что может привести к
их разрушению. Поэтому для плазмы в современном токамаке как сложном
неустойчивом динамическом объекте требуются стабилизация неустойчиво-
го вертикального положения и управление ее формой [2, 3]. Такая плазма
может существовать только в системе с обратной связью, обеспечивающей
внутреннюю устойчивость замкнутого контура управления [4].
Для достижения требуемых показателей в параметрах плазмы и одно-
временно высокого уровня надежности установки необходимо одновременно
решать множество задач магнитного и кинетического управления плазмой.
Первостепенной задачей для современного токамака является задача маг-
нитного управления положением, током и формой плазмы. Обзор систем маг-
нитного управления плазмой в токамаках [2, 5-8] показал, что в современных
действующих токамаках существует большое разнообразие полоидальных си-
стем и соответствующих подходов к синтезу и архитектуре систем магнитного
управления плазмой. В данный момент в мире не существует отработанной
общей методики синтеза систем магнитного управления плазмой, ее разра-
ботка в совокупности с оптимизацией конфигурации исполнительной систе-
мы магнитных катушек полоидального поля далека от завершения и требует
дополнительных исследований и новых идей.
Данная статья посвящена анализу устойчивости системы управления вер-
тикальным положением плазмы к смещениям по вертикали с учетом ограни-
чений на величину управляющих сигналов для проекта токамака ИГНИТОР
[9, 10]. Проект ИГНИТОР особенно выделяется, поскольку он является одним
из немногих, в котором имеется возможность получить самоподдерживаю-
щуюся термоядерную реакцию [1, 9], что делает его наиболее близким к тер-
моядерным электростанциям будущего [8]. В проекте установки ИГНИТОР
имеется большое количество катушек полоидального поля и секций централь-
ного соленоида по сравнению с другими проектами и действующими токама-
ками, что приблизит систему магнитного управления плазмой в нем к системе
с распределенным управлением и позволит создавать разнообразные магнит-
ные конфигурации плазмы. Это даст возможность исследовать и оптимизи-
ровать систему магнитного управления плазмой для достижения наилучших
характеристик автоматического управления по сравнению с известными си-
стемами данного вида.
101
В данной работе проводятся анализ и сравнение двух вариантов полои-
дальных систем токамака ИГНИТОР с разными управляющими катушками
горизонтального поля: пара P6 & P12; катушка HFC (Horizontal Field Coil),
расположенная вблизи камеры, предложенная и обоснованная в [11].
2. Постановка задачи
Основная задача системы управления вертикальным положением плазмы
с обратной связью в D-образном токамаке — это подавление вертикальной
неустойчивости плазмы. При этом система за счет обратной связи способ-
на подавлять резкие возмущения вертикального положения плазмы, вызван-
ные разными причинами, например: различными неустойчивостями плазмы
с временем развития меньшим, чем время реакции системы управления; за-
держками в контуре управления; шумами на входе регулятора ошибки управ-
ления, малыми срывами (сбросами давления плазмы и ее внутренней индук-
тивности).
Математическая постановка задачи в работе сводится к следующим эта-
пам.
• Для оценки зон работоспособности систем управления при смещениях вер-
тикального положения плазмы необходимо синтезировать динамическую
модель плазмы с использованием законов Кирхгоффа и баланса сил Нью-
тона. Сами смещения предлагается моделировать как мгновенные возму-
щения вектора состояний x [3] в модели плазмы в пространстве состояний
вида
dx
(1)
= Ax + Bu + B1
w, y = Cx,
dt
где входом модели u является подаваемое на управляющую катушку на-
пряжение, выходом y - координаты центра массы плазмы и токи в катуш-
ках токамака, вектор состояния модели x - приращения токов в катушках
полоидального поля и секциях центрального соленоида токамака, плазме
и элементах вакуумной камеры, w - внешнее координатное возмущение в
виде импульса длительностью 1 мс, приводящее к смещению плазмы по
вертикали, B1 - вектор-столбец, через который возмущение подается в со-
стояния модели объекта управления. Возмущение w имитирует процесс,
вызванный различными указанными выше причинами, который вызывает
смещение плазмы по вертикали.
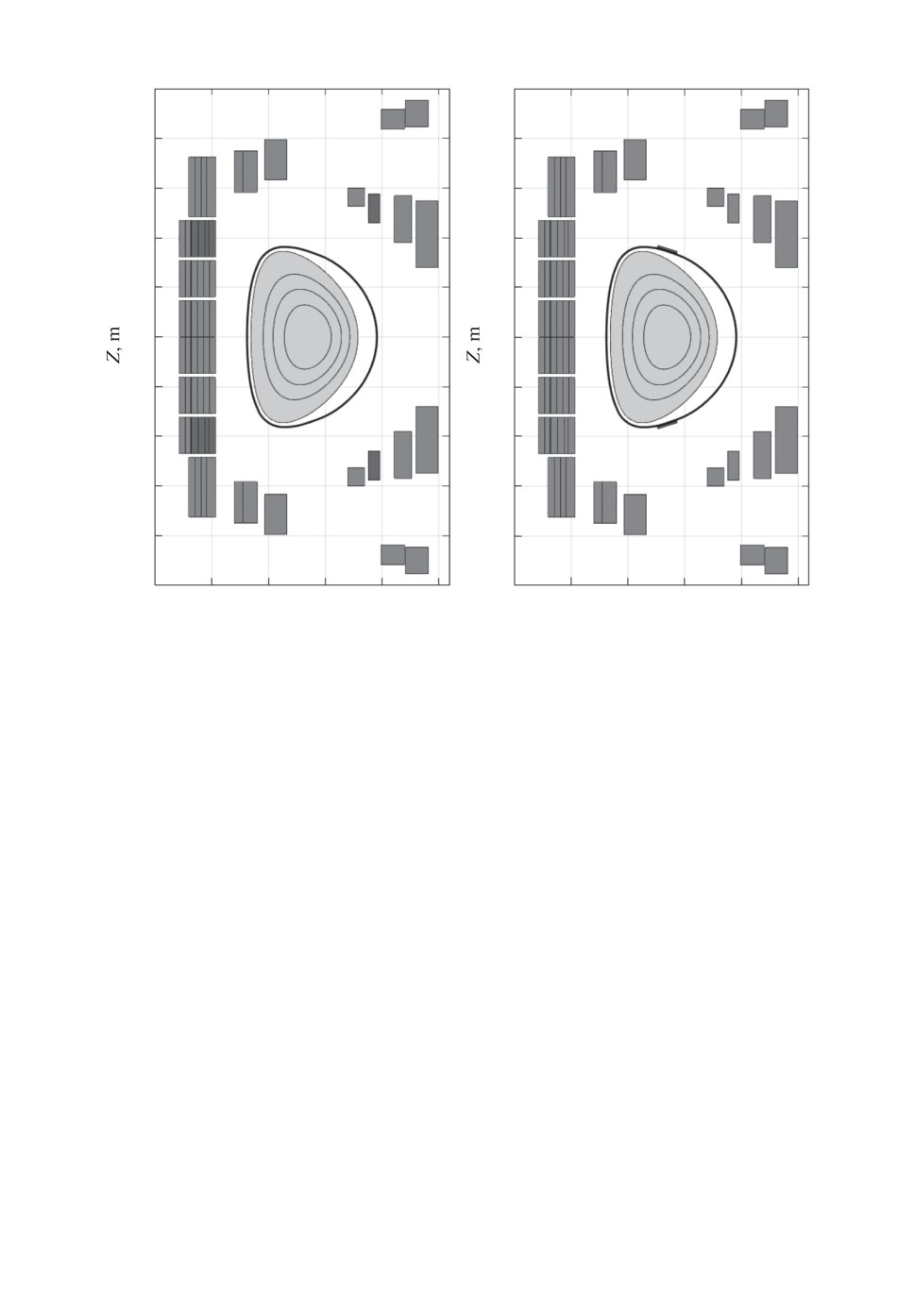
• Предлагается рассмотреть конфигурации полоидальной системы токама-
ка ИГНИТОР с парой P6 & P12 в качестве управляющей вертикальным
положением плазмы катушки (рис. 3,а) [9] и расположенной на расстоя-
нии 1 см от камеры управляющей катушкой HFC (рис. 3,б ) [11]. Целью
исследований является сравнение эффективности управления вертикаль-
ным положением плазмы с применением двух разных катушек в токамаке
ИГНИТОР: P6 & P12 и HFC. Сравнение предлагается проводить по крите-
рию величины области управляемости по вертикали [11], т.е. наибольшей
102
z1
N
M
y
r
u
v
K
1
N
M
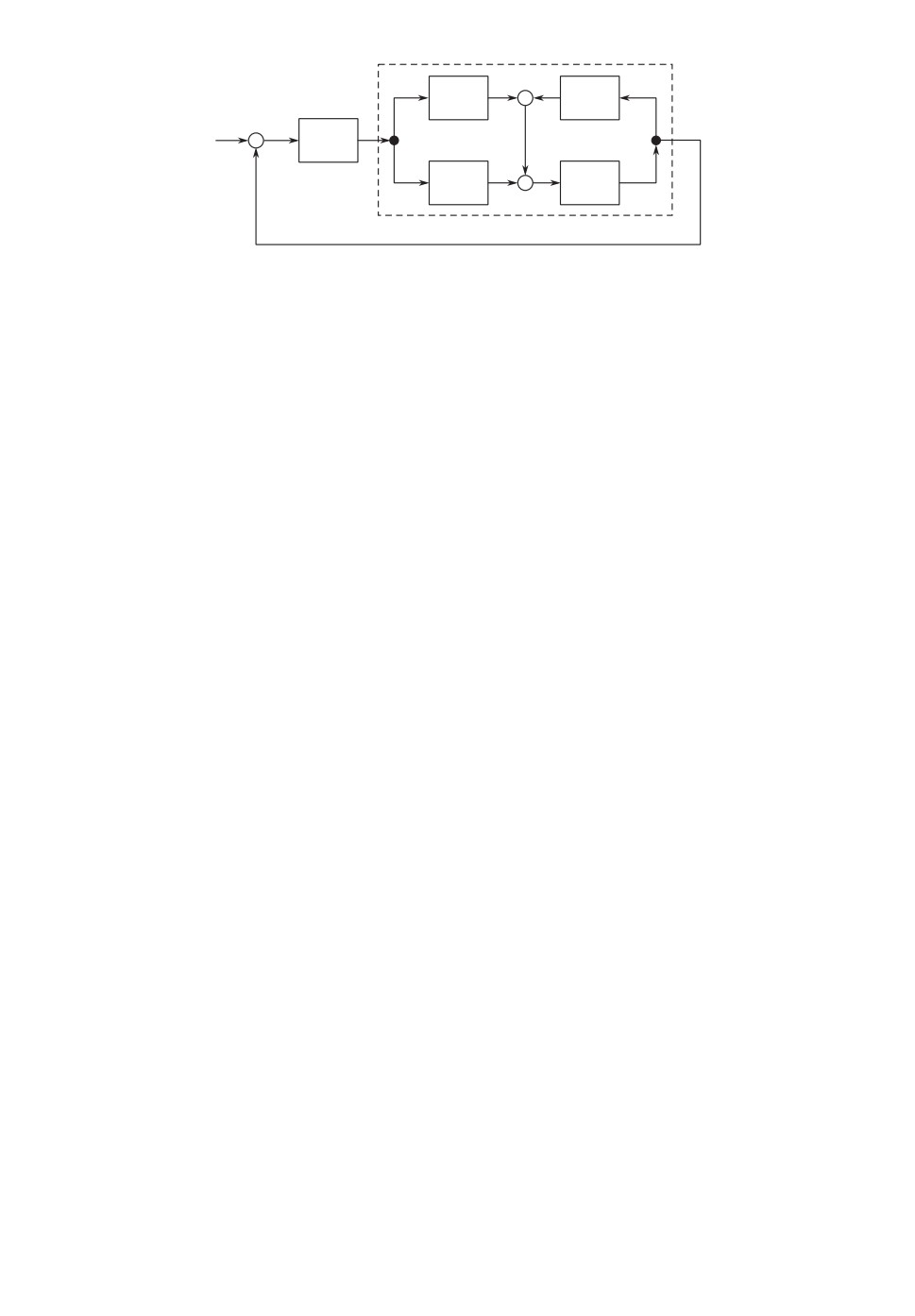
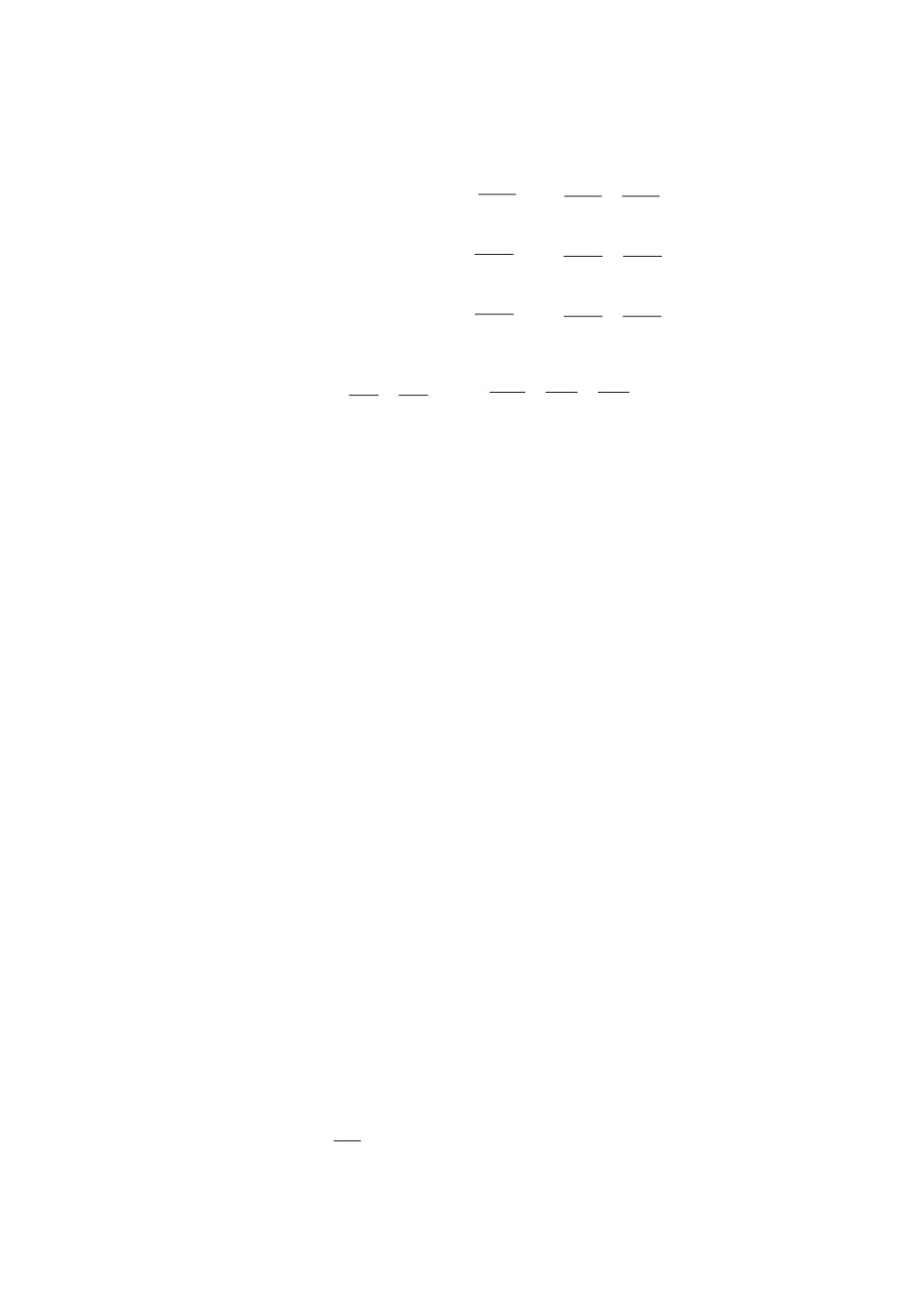
Рис. 1. Схема факторизованной модели объекта с неопределенностями, охва-
ченной отрицательной обратной связью с регулятором K.
величине вертикального смещения Z плазмы, при котором плазму воз-
можно вернуть в положение Z = 0, не выходя за ограничение на величину
управляющего напряжения. Таким образом, имеются фазовые ограниче-
ния в пространстве состояний модели объекта, которые в задаче управле-
ния плазмой по вертикали выражаются в ограничения по Z [12]:
(2)
|u| < umax ⇒ Z(t) ∈ [-Zmax + Zmax] , t > t0.
Это означает, что если по каким-либо причинам изображающая точка вый-
дет из области управляемости, например из-за действия внешних возму-
щений, то при заданном ограничении на управляющее воздействие изобра-
жающую точку будет уже невозможно вернуть в область управляемости.
• Предлагается синтезировать робастные системы управления посредством
оптимизации норм передаточных функций в замкнутых системах управле-
ния. Возмущенная модель Gp с неопределенностью типа немоделируемой
динамики ΔM и ΔN факторизуется как [4, 13, 14]
Gp(s) = (M + ΔM )-1 (N + ΔN ) ,
где ΔM и ΔN — неизвестные устойчивые передаточные функции, которые
представляют неопределенность в номинальной модели объекта
G=M-1N.
По теореме о малом коэффициенте усиления [4] запас робастной устойчи-
вости ε в синтезированной замкнутой системе удовлетворяет неравенству
(рис. 1)
ε=
ΔM ΔN
< 1/ ∥Q∥∞ ,
∞
где
[
]
K
Q=-
(I + GK)-1 M-1
I
103
является передаточной функцией замкнут[й с]стемы без неопределенно-
u
сти, т.е. передаточной функцией от v к
, (I + GK)-1 — функция
y
чувствительности для отрицательной обратной связи, K — передаточная
функция регулятора из класса стабилизирующих регуляторов.
Для нахождения оптимального робастного регулятора Kopt, доставляюще-
го максимум запаса устойчивости ε, требуется решение задачи оптимиза-
ции вида
(3)
Kopt = arg min
∥Q∥∞ .
K stabilizing
При решении задачи (3) определяется и минимальная Н∞-норма переда-
точной функции Q, которая позволяет вычислить максимальный запас ро-
бастной устойчивости ε при найденном оптимальном робастном регулято-
ре Kopt.
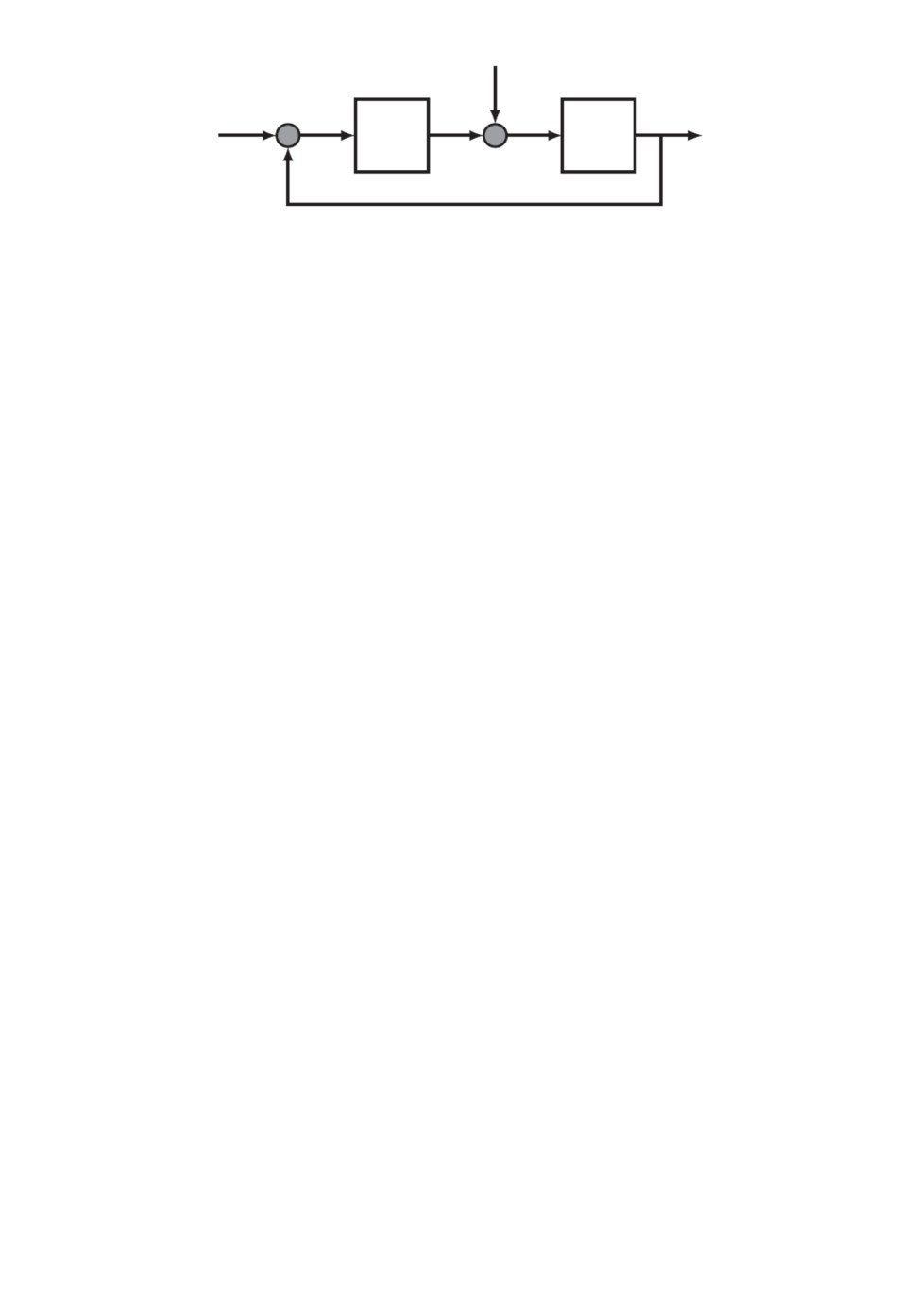
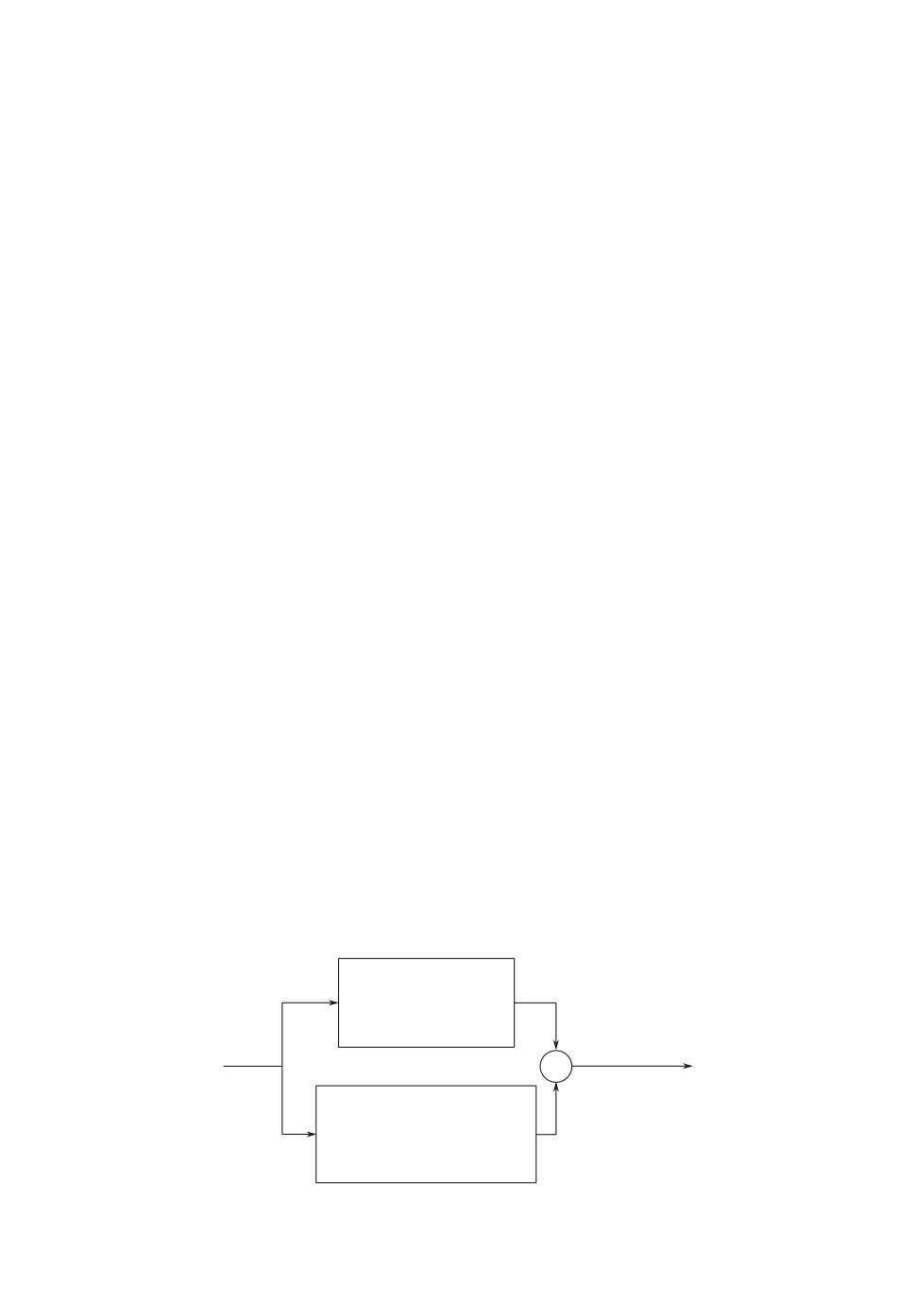
• Другая система управления (рис. 2) содержит ПИД-регуляторы с переда-
точной функцией
1
s
(4)
C(s) = KP +
KI +
KD,
s
1+τs
где KP , KI , KD — неизвестные параметры ПИД-регулятора. Алгоритм на-
стройки таких ПИД-регуляторов предполагает минимизацию спектраль-
ной нормы матрицы (модуля в скалярном случае) статической и низко-
частотной чувствительности замкнутой системы (P (0)KI )-1 с моделью
объекта управления P(s) и коэффициентом при интеграторе в ПИД-
регуляторе KI , которая получается посредством разложения в ряд Тей-
лора функции чувствительности замкнутой системы в нуле
(
(
))-1
KI
KDs
S(s) = I + P (s) KP +
+
,
s
τs+1
dS
= (P (0)KI )-1 , S(s) ≈ s (P (0)KI )-1
ds
s=0
для малых s. Также в замкнутой системе необходимо обеспечить вы-
полнение ограничений H∞-норм функций чувствительности S , дополни-
тельной функции чувствительности T и Q-параметра замкнутой системы
Q(s) = C(s)S(s) [4, 15]. Для подавления внешнего возмущения необходимо
ограничить передаточную функцию R(s) между внешним возмущением d
и ошибкой e (рис. 2):
⎧
1
⎪
min
(P (0)KI )-
,
⎪
2
⎪
⎨
s.t.
∥S(s)∥∞ ≤ Smax,
∥T(s)∥∞ ≤ Tmax,
⎪
⎪
⎪
∥Q(s)∥∞ ≤ Qmax,
⎩
∥R(s)∥∞ ≤ Rmax.
104
d
r
e
u
y
C(s)
P(s)
Рис. 2. Классическая система с обратной связью с управлением по ошибке.
R(s) = - (I + P (s)C(s))-1 P (s).
Таким образом, в замкнутой системе обеспечивается слежение с мини-
мально возможной ошибкой между задающим воздействием и выходом
при ограниченном входном воздействии на модель объекта управления, а
также решается задача отражения (подавления) внешнего входного воз-
мущения.
• После синтеза систем управления предлагается их математическое моде-
лирование в среде MATLAB/Simulink с целью их сравнения для двух видов
обмоток горизонтального поля: HFC и Р6 & P12.
3. Физико-математический ход решения задачи
Высокотемпературная плазма в токамаке (тороидальной камере с магнит-
ными катушками) представляет чрезвычайно сложное явление. Это газ, со-
стоящий из положительно (ионы) и отрицательно (электроны) заряженных
частиц, неравномерно распределенных внутри тороидальной камеры и удер-
живаемых в магнитном поле. По газу протекает электрический ток в торои-
дальном и полоидальном направлениях. Для удержания плазмы в магнитном
поле создается система тороидальных и полоидальных магнитных обмоток
(рис. 3). Тороидальная обмотка создает сильное тороидальное поле, что из-
бавляет плазму от большого количества разного вида неустойчивостей.
Во избежание взаимодействия плазмы с первой стенкой токамака созда-
ются секции центрального соленоида (индуктора), которые не только за счет
трансформаторного эффекта создают ток в плазме, но и совместно с обмотка-
ми полоидального поля удерживают плазму вблизи первой стенки. Несмотря
на довольно длительное развитие токамаков (около семи десятков лет), ме-
тоды выбора количества катушек полоидального поля и методики оптимиза-
ции их расположения до конца не исследованы и отсутствуют общепринятые
стандарты для решения данных задач. В современных токамаках и при их
проектировании не учитываются важные аспекты управляемости плазмы. По
этой причине возникает необходимость коррекции полоидальных систем либо
посредством переноса некоторых обмоток [2], либо посредством добавления
новых обмоток [8, 11]. В этой связи введение новых обмоток горизонтально-
го и вертикального поля в проекте токамака ИГНИТОР вызвало необходи-
мость оптимизации их положения и синтеза новых регуляторов для управ-
ления положением плазмы. Исходя из этого возник физико-математический
105
a
б
2,5
2,5
P10U
P10U
2,0
P9U
P15UP16U
2,0
P9U
P15UP16U
P8U
P8U
P11U
P11U
P13U
P13U
1,5
1,5
P12U
HFCU P12U
1,0
P6U
1,0
P6U
P5U
P5U
P3U
P4U
P14U
P3U
P4U
P14U
0,5
0,5
0 P1
P2
0
P1
P2
0,5P3L
0,5
P4L
P14L
P3L
P4L
P14L
P5L
P5L
1,0
P6L
P12L
1,0
P6L
HFCL
P12L
1,5
P13L
1,5
P13L
P11L
P11L
P8L
P8L
2,0
P9L
P15L P16L
2,0
P9L
P15L P16L
P10L
P10L
2,5
2,5
0
0,5
1,0
1,5
2,0
2,5
0
0,5
1,0
1,5
2,0
2,5
R, m
R, m
Рис.
3. Рассмотренные конфигурации полоидальной системы токамака
ИГНИТОР, а - управляющая катушка - пара P6 & P12, б - управляющая
катушка HFC, расположенная вблизи камеры.
ход решения поставленной задачи: подавление смещений плазмы по вертика-
ли посредством регулятора в замкнутой системе управления неустойчивым
вертикальным положением плазмы в токамаке ИГНИТОР с вытянутым по
вертикали поперечным сечением плазмы.
Вначале по данным токамака ИГНИТОР, а именно расположение, число
витков и сопротивления CS/PF (Central Solenoid/Poloidal Field — Централь-
ный соленоид/Полоидальное поле)-катушек, расположение элементов каме-
ры и их сопротивления, токи в катушках, токи в камере, распределение тока
плазмы, давление плазмы, строится линейная модель плазмы в токамаке,
поскольку, как показывает опыт эксплуатации токамаков, линейной моде-
ли достаточно для разработки и применения систем магнитного управления
плазмой [2, 3, 5-8].
Затем построенная линейная модель плазмы в токамаке анализируется
на предмет ее управляемости. В [16] подчеркиваются основные факты об
управлении неустойчивыми объектами:
• «неустойчивыми объектами принципиально и количественно сложнее
управлять, чем устойчивыми;
106
• регуляторы для неустойчивых объектов являются критически важными
для работы систем управления;
• замкнутые системы с неустойчивыми компонентами являются только ло-
кально устойчивыми».
Последнее означает, что неустойчивый объект не может быть стабилизиро-
ван глобально в пространстве состояний с ограниченным управляющим воз-
действием. Ограниченность входного воздействия для неустойчивого объекта
влечет за собой ограниченность области, в которой можно переводить объ-
ект из одного состояния в другое с помощью регулятора. Эта область должна
быть достаточно большой, чтобы можно было гарантированно в этой области
подавлять внешние возмущения типа малого срыва, когда происходят сбросы
давления и внутренней индуктивности плазмы [1]. Если область управляемо-
сти относительно мала, то тогда объект будет являться слабо управляемым и
решать задачу стабилизации для обеспечения локальной устойчивости будет
трудно: малые возмущения будут выводить объект управления из области
управляемости, что заведомо приводит к потере устойчивости замкнутой си-
стемы управления [17].
В этой связи приводится определение области управляемости для случая
неустойчивой линейной модели объекта управления (1) с ограниченным вход-
ным воздействием.
Определение. Областью управляемости неустойчивой линейной мо-
дели (1) с ограниченным скалярным входным воздействием u, |u| ≤ u0 =
= const, называется ограниченная область в пространстве состояний
X ⊂ Rn, в которой можно переводить модель объекта из одной точки
→x2, при-
чем вне этой области x ∈ X траектории модели уходят в бесконечность
при любых значениях управляющего воздействия |u| ≤ u0.
Вне области управляемости замкнутая система теряет устойчивость при
любом регуляторе в обратной связи, который обеспечивает работоспособ-
ность системы в области управляемости. В данном случае, поскольку плазма
неустойчива по вертикали, а напряжение ограничено на обмотке HFC, об-
ласть управляемости вертикального положения плазмы ограничена.
Поэтому сначала по модели плазмы вычисляется размер ограниченной
области управляемости по вертикальной координате для двух видов кату-
шек горизонтального поля: Р6 & 12 из проекта ИГНИТОР и HFC, введен-
ной в [11]. Величина области управляемости вычисляется двумя способами:
аналитически и численным экспериментом. Аналитическая оценка области
управляемости осуществляется без учета влияния устойчивых мод в неустой-
чивой линейной модели плазмы, поэтому для получения более точной оценки
применяется численный эксперимент, предложенный в [17] для определения
величины области управляемости в реальном физическом эксперименте дей-
ствующих токамаков.
В проведенных оценках принималось во внимание, что выход изображаю-
щей точки из области управляемости, например по причине воздействия
107
внешнего возмущения, приводит к неконтролируемой неустойчивости систе-
мы управления. В данном случае вне области управляемости система теря-
ет управляемость, а поскольку объект неустойчивый, то потеря управляемо-
сти влечет за собой и потерю устойчивости замкнутой системы управления.
Таким образом, за пределами данной области замкнутая система является
неустойчивой при любых управляющих воздействиях в пределах наложен-
ных ограничений на входное воздействие. Кроме того, при замыкании мо-
дели неустойчивого объекта стабилизирующей обратной связью происходит
смещение полюсов замкнутой системы в левую часть комплексной плоскости,
но при этом модель объекта все равно остается неустойчивой. Это говорит
о том, что при сбое в обратной связи системы управления она может поте-
рять устойчивость вне зависимости от нахождения ее вектора состояния в
области управляемости. Итак, система управления неустойчивым объектом
с ограниченным управлением является всегда опасной [16], поскольку сбои в
ней могут привести к потере устойчивости, а в D-образных токамаках потеря
устойчивости системы управления вертикальным положением плазмы может
вызвать большой срыв [1].
Модель (1) из-за ограниченности управления u является нелинейной, по-
этому обладает не только ограниченной областью управляемости, но и свой-
ством локальной стабилизации [18]. Это означает, что при введении обратной
связи по состоянию с размещением полюсов в левой полуплоскости комплекс-
ной плоскости (модальное управление) [19] и при наличии управляемости или
стабилизируемости пары (A, B), w = 0, траектории в пространстве состояний
будут асимптотически стремиться к нулю в области управляемости. В этом
случае область управляемости будет являться областью притяжения начала
координат, а закон управления с обратной связью будет обеспечивать стаби-
лизацию в области.
Для удержания плазмы в оцененной области управляемости необходим
синтез системы управления вертикальным положением плазмы с обратной
связью по вертикальному положению плазмы. При выборе подхода к раз-
работке данной системы целесообразно руководствоваться принципом опти-
мизации, который давно прочно внедрился в область синтеза систем управ-
ления [20]. Для линейных систем популярно в настоящее время множество
разнообразных методов синтеза регуляторов. В настоящей статье для разра-
ботки систем управления неустойчивым объектом выбраны два метода:
1) метод H∞-оптимизации [13, 14, 21] и
2) метод линейных матричных неравенств (Linear Matrix Inequalities —
LMI) [22].
В первом случае наиболее привлекательным является безытерационный
метод робастной стабилизации МакФарлея-Гловера, который позволяет ми-
нимизацией критерия качества (3) на классе стабилизирующих регулято-
ров сразу получить робастный регулятор и робастный запас устойчивости
замкнутой системы. С другой стороны, известный алгоритм Дж. Дойла и
др. требует итераций и после сходимости к искомому регулятору с некоторой
точностью необходима дополнительная оценка запаса устойчивости [23].
108
При применении LMI для синтеза системы может ставиться задача по-
луопределенного программирования, при которой оптимизация выбранного
параметра γ при выполнении ограничений типа LMI с участием этого пара-
метра приводит к нахождению робастного регулятора [22]
γ → max s.t. F (x,γ) ≥ 0,
где
∑
F (x) = F0 + xiFi, Fi = FTi, xi ∈ R1, i = 1, . . . , l.
i=1
В последнее время повысился интерес к ПИД-регуляторам, имеющим ис-
торию более ста лет, поскольку в промышленности они занимают около 97%
по сравнению со всеми регуляторами других типов. Возрастание интереса
к ПИД-регуляторам видно, например, из того, что на последнем всемирном
конгрессе IFAC в 2020 г. (Германия) был организован до открытия конгрес-
са специальный семинар, посвященный только ПИД-регуляторам под руко-
водством профессора Л. Уонг, которая в 2020 г. издала монографию в этой
области [24]. Интерес к ПИД-регуляторам объясняется тем, что скалярные
ПИД-регуляторы имеют всего три параметра, которые подлежат настройке,
что позволяет их настраивать непосредственно на реальных объектах. На-
пример, ПИД-регуляторы применяются в каскадах управления отдельными
тарелками на ректификационных колоннах [4]. При этом ПИД-регуляторы
привносят в замкнутые системы управления свойства робастности. К настоя-
щему времени разработано довольно много различных подходов для настрой-
ки ПИД-регуляторов [24].
Кроме этого, совсем недавно [15] появился подход к синтезу ПИД-регу-
ляторов с матричными коэффициентами. Решение задачи синтеза при этом
сводится к переходу в частотную область, созданию системы квадратичных
неравенств, аппроксимации ее системой LMI посредством выпукло-вогнутой
процедуры и итеративному решению полученной системы LMI.
Математический синтез систем управления вызывает необходимость по-
следующего численного моделирования на линейной модели плазмы и испол-
нительного устройства с заданными параметрами, определяемыми началь-
ными численными данными, полученными для проекта ИГНИТОР. Модели-
рование предполагается в компьютерной среде MATLAB/Simulink от компа-
развита для синтеза, анализа и моделирования многомерных систем управ-
ления динамическими объектами, описываемых либо дифференциальными,
либо разностными уравнениями.
Основной результат, на который была направлена постановка задачи, —
это доказательство того, что катушка HFC обеспечивает гораздо большую об-
ласть управляемости, чем имеющиеся в проекте ИГНИТОР катушки Р6 & 12.
При этом поставлена задача синтеза робастных систем управления для обо-
их видов катушек, чтобы убедиться в том, что для этих катушек области
возможных вертикальных смещений также являются различными. Система
109
управления вертикальным положением плазмы с катушкой HFC способна
подавлять заметно большие вертикальные смещения плазмы, чем система
управления с катушками Р6 & 12.
4. Линейная модель плазмы в токамаке
Построенная линейная модель плазмы основана на уравнениях для конту-
ров токов катушек, плазмы и элементов камеры, а также уравнениях баланса
действующих на плазму сил
d
d
d
Ψc + RcIc = U,
Ψv + RvIv = 0,
Ψp + RpIp = 0,
dt
dt
dt
F (I, R, Z) = 0.
Здесь Ψc, Ψv, Ψp — вектор-столбцы магнитных потоков через контуры ка-
тушек, элементы камеры, и плазмы, Rc, Rv, Rp — диагональные матрицы
[
]T
сопротивлений контуров, I =
ITc,ITv,Ip
— вектор-столбец токов в конту-
рах токамака, включающий в себя токи в катушках Ic, токи в элементах
камеры Iv и ток плазмы Ip, U — вектор-столбец подаваемых на катушки
напряжений, R и Z — горизонтальная и вертикальная координаты центра
массы плазмы
F — вектор действующей на плазму силы.
Модель линеаризована возле описанного в [10] магнитогидродинамическо-
го (МГД) равновесия плазмы для момента времени t = 3,65 с.
Линеаризованные уравнения модели для отклонений δ от положения рав-
новесия имеют вид:
уравнения Кирхгофа для контуров катушек
∂Ψc d
∂Ψc d
∂Ψc d
δI +
δR +
δZ + RcδIc = δU,
∂I dt
∂R dt
∂Z dt
для контуров камеры токамака
∂Ψv d
∂Ψv d
∂Ψv d
δI +
δR +
δZ + RvδIv = 0,
∂I dt
∂R dt
∂Z dt
для контура плазмы
∂Ψp d
∂Ψp d
∂Ψp d
δI +
δR +
δZ + RpδIp = 0.
∂I dt
∂R dt
∂Z dt
Уравнение баланса сил, действующих на плазму,
F
F
∂F
F
F
δIc +
δIv +
δIp +
δR +
δZ = 0.
∂Ic
∂Iv
∂Ip
∂R
∂Z
Линейными преобразованиями модель приведена к стандартному виду (1)
в пространстве состояний [25], где
[
]T
x = δI, u = δU, y =
δZ δITc
,
110
⎡
⎤
Rc
0
0
A=-
M-1 ⎣
0
Rv
0
⎦,B= M˜-1EHFC,
0
0
Rp
⎡
[
]
⎤
∂Ψ
c
∂Ψc
∂Ψc
+
P
⎢
⎥
∂I
∂R
∂Z
[ [
]
]
⎢
⎥
[
]
⎢
⎥
0
1
P
∂Ψv
⎢
∂Ψv
∂Ψv
⎥
M=
C =
,
⎢
+
P
⎥,
ETHFC
⎢
∂I
∂R
∂Z
⎥
⎢
[
]
⎥
⎦
⎣ ∂Ψp
∂Ψp
∂Ψp
+
P
∂I
∂R
∂Z
[
]-1[
]
∂F
F
F
F
F
P =-
,
∂R
∂Z
∂IA
∂Iv
∂Ip
[
]T
EHFC — вектор-столбец высотой в количество токов I =
ITc,ITv,Ip
с едини-
цей в позиции, соответствующей току управляющей катушки IHFC, и нулями
на остальных позициях. Вектор-столбец B1 не имеет аналитического выра-
жения и был подобран так, чтобы имитировать процесс вертикального срыва
плазмы.
Рассчитанная для токамака ИГНИТОР модель имеет 29 состояний (13 то-
ков в катушках токамака, 15 токовых мод, наводящихся на камере, ток плаз-
мы), один вход (напряжение на управляющей катушке) и два выхода (вер-
тикальное смещение плазмы и ток в управляющей катушке), единственный
действительный неустойчивый полюс γ > 0, соответствующий неустойчиво-
сти вертикального положения плазмы. Модель позволяет воспроизводить
возмущения плазмы по вертикали при помощи резких скачков вектора со-
стояний x, реализованных в модели (1) через импульсное возмущение w и
вектор-столбец B1.
5. Оценка величины области управляемости
вертикального положения плазмы
Важным параметром полоидальной системы является размер области
управляемости вертикального положения плазмы. В общем случае замкнутая
система управления теряет устойчивость при возмущениях, превышающих по
амплитуде размер области управляемости [11].
Для аналитической оценки этой величины при помощи преобразования ба-
зиса пространства состояний модель (1) была приведена к блочно-диагональ-
ной форме с неустойчивым полюсом γ в качестве одного из блоков [26, 27]:
dx
=Aˆx +Bu, Z
Cx,
dt
[
]
[
]
An-1
0
Bn-1
[
]
B=
A=
,
,
C =
Cn-1
ĉn
,
0
γ
bn
111
An-1 ∈ Rn-1×n-1,
Bn-1 ∈ Rn-1×1,
Cn-1 ∈ R1×n-1,
γ > 0, γ,bn,ĉn ∈ R1.
В таком виде модель эквивалентна параллельному соединению устойчивого
и неустойчивого звеньев (рис. 4). При ограничении на величину управляю-
щего воздействия |u| < umax условие, при котором управление может вли-
ять на знак скорости изменения неустойчивого состояния, принимает вид
|bn|umax > γ|xn|. Пренебрегая вкладом устойчивого звена в выход, получим
отсюда оценку макимального управляемого вертикального смещения плаз-
мы |Zmax| = |ĉn|
bn
|umax|/γ. Для токамака ИГНИТОР с ограничением на
напряжение umax = 1000 В и управляющей катушкой P6 & P12 такая оценка
дает |Zmax| = 1,6 см, а с управляющей катушкой HFC — |Zmax| = 37,2 см.
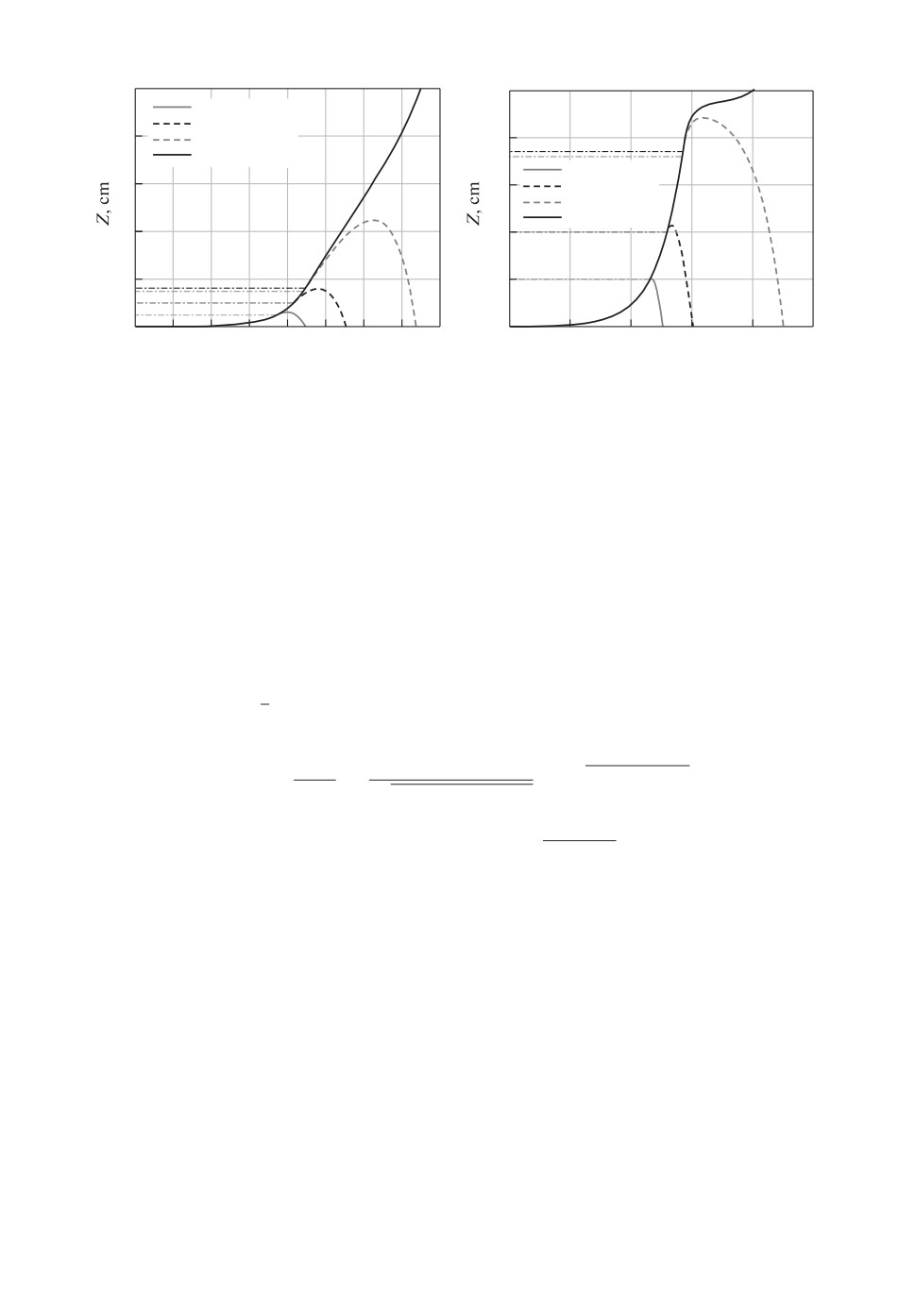
Для численной оценки области управляемости по модели (1) была про-
ведена серия численных экспериментов, как предложено в [17], в которых
при отключенной системе управления вертикальным положением плазме поз-
волялось сместиться в силу неустойчивости на расстояние ΔZ, после че-
го на управляющую катушку подавалось максимально допустимое напря-
жение umax = 1000 В соответствующего знака. На разные начальные рас-
стояния ΔZ плазма смещалась по одной и той же траектории, что видно
из рис. 5.
Результаты моделирования показаны на рис. 5 и согласуются с аналитиче-
ской оценкой, полученной по методике, развитой в [26, 27]: катушка P6 & P12
теряет управляемость модели объекта управления при отклонениях по вер-
тикали амплитудой примерно 1,5 см (рис. 5,а), катушка HFC теряет управ-
ляемость при отклонениях около 36 см (рис. 5,б ). Данные результаты согла-
суются с приведенной выше аналитической оценкой области управляемости.
Потеря управляемости катушками в разомкнутой системе означает, что при
выходе вектора состояния модели объекта управления за пределы области
управляемости (в данном случае это связано с начальными условиями) лю-
бая замкнутая система теряет устойчивость и катушки управления не имеют
возможности вернуть систему в область управляемости при ограниченном на
них напряжении даже при наличии работоспособной в области управляемо-
сти обратной связи.
d^
^
= ^n + bn u,
dt
^
Zn = ^n^
^
^
u
Z = Z
n + Z
n 1
dxn1
^
^
= An1^n1+ Bn1u,
dt
^
^
Zn1 = Cn1^n1
Рис. 4. К аналитическому определению величины области управляемости.
112
а
б
10
50
Z = 0,5 cm
Z = 1,0 cm
8
Z = 1,5 cm
40
Z = 1,6 cm
Z = 10 cm
6
30
Z = 20 cm
Z = 36 cm
Z = 37 cm
4
20
2
10
0
0,05 0,10 0,15 0,20 0,25
0,30 0,35 0,40
0
0,2
0,4
0,6
0,8
1,0
Time, s
Time, s
Рис. 5. Численная оценка максимального управляемого смещения плазмы,
горизонтальными линиями показаны значения смещения плазмы, после кото-
рого на катушку управления подавалось напряжение, а - управляющая ка-
тушка - пара P6 & P12, б - управляющая катушка - расположенная вблизи
камеры HFC.
6. Синтез систем управления положением плазмы
6.1. Cинтез методом H∞-оптимизации
Робастный регулятор управления вертикальным положением плазмы син-
тезируется методом нормализованной взаимно простой факторизации [13] и
частотного формирования разомкнутого контура (Loop Shaping) [14]. Пусть
в (3) ∥Q∥∞ = γ ≤ 1ε . Наименьшее достижимое значение γ и соответствующий
максимальный запас устойчивости ε даны в [21]:
1
1
√
γmin =
=
√
=
1 + ρ(XZ),
εmax
NM
2
1-
H
√
где σ1 = ∥G∥H - ганкелева норма G(s), σi =
λi (PO) - упорядоченные ган-
келевы сингулярные числа, ρ - спектральный радиус (ρ (A) = max|λi (A)|),
i
P и O - грамианы управляемости и наблюдаемости, для минимальной реали-
зации (1) (A, B, C, D = 0) Z и X - единственные положительно определенные
решения алгебраических уравнений Риккати
AZ + ZA - ZCCTZ + BBT = 0,
AX + XA - XBBTX + CTC = 0.
Центральным регулятором, который гарантирует, что ∥Q∥∞ ≤ γ для задан-
ного γ > γmin, является регулятор с матрицей K следующего вида [13]:
[
]
(
T
A-BBTX+γ2
LT
)-1 ZCTC γ2 (LT )-1 ZC
K =
,
BTX
0
(
)
L=
1-γ2
I+XZ.
113
Все регуляторы, при которых значение нормы ∥Q∥∞ достигает значения
γ = γmin, задаются формулой [13]
K =UV-1,
где U и V - устойчивые матрицы, (U, V ) - правая взаимно-простая факто-
ризация K, а U, V удовлетворяют равенству
[
]
[
]
-N∗
U
[
]
+
=
N M
H
M∗
V
∞
Модель объекта управления характеризуется передаточной функци-
ей G(s), полученной из модели в пространстве состояний (1). Данная модель
масштабируется по входу и выходу:
Gs(s) = d
G(s)din
ut
к единичным диапазонам сигналов, дополняется входной W1(s) и выход-
ной W2(s) весовыми передаточными функциями и факторизуется следующим
образом:
Ga(s) = W1(s)d
ut
G(s)dinW2 = M-1(s)N(s),
где M(s) и N(s) удовлетворяют равенству Безу
M (s)M(s)∗ + N(s)N∗(s) = 1.
Финальный регулятор из решения задачи оптимизации (3) в обратной связи
с учетом весовых функций и масштабирующих множителей имеет вид
KVS(s) = dinW2(s)Kopt(s)W1(s)d-1out.
Размерность робастного регулятора зависит от размерности исходной модели
объекта управления, поэтому финальный регулятор редуцируется до малого
порядка [4], обеспечивающего при этом качественное управление.
6.2. Синтез методом LMI
В этом разделе синтезируется каскадная система управления с робастны-
ми ПИД-регуляторами вертикального положения плазмы и тока в катушке
горизонтального поля. Синтез осуществляется методом LMI. Подход, исполь-
зуемый для синтеза этих регуляторов, идентичен подходу, использованному
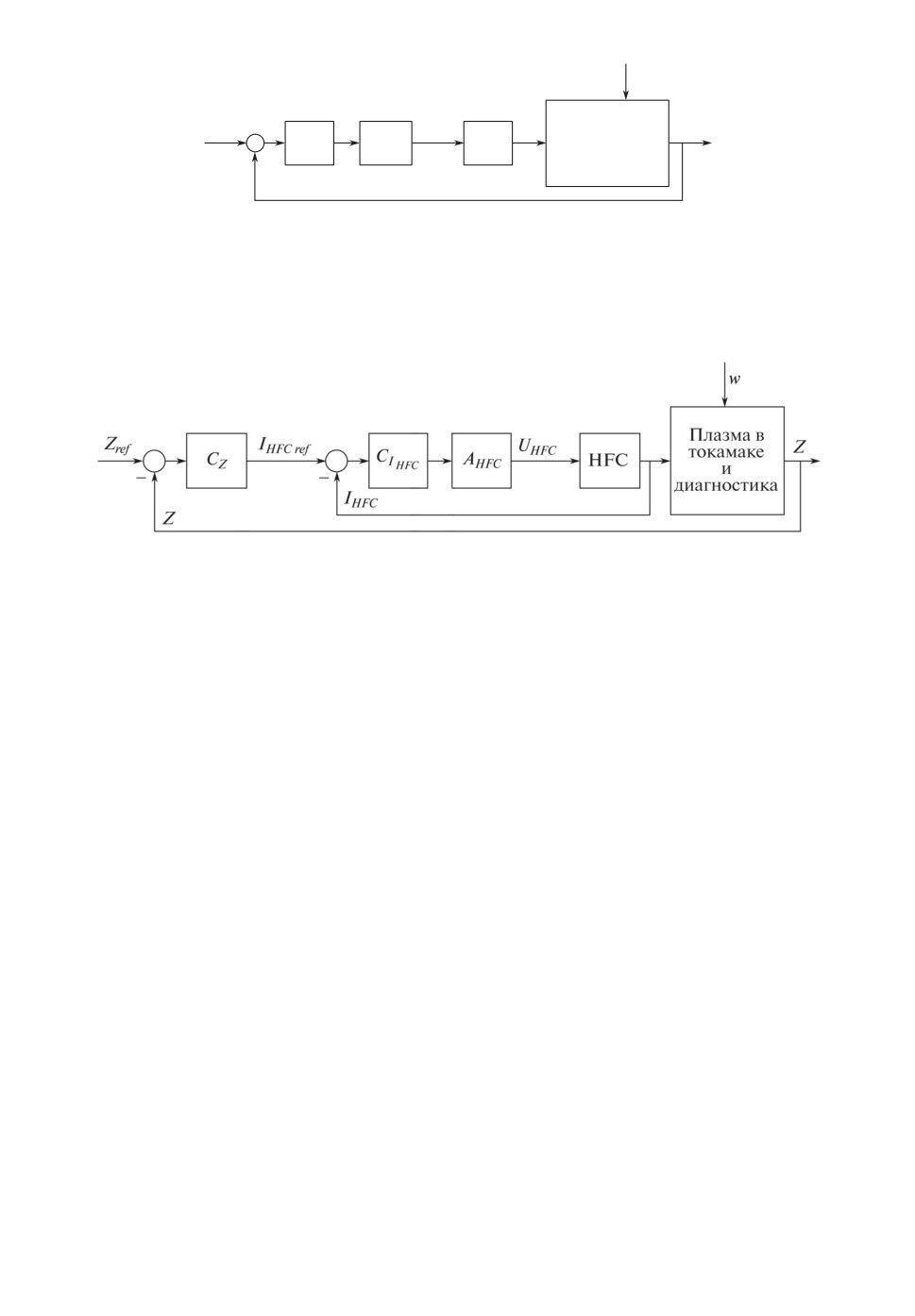
в [11, 29]. Структурная схема системы управления для этого случая приведе-
на на рис. 7, где внутренний каскад с регулятором CIHFC управляет током в
катушке горизонтального поля, а внешний каскад с регулятором CZ — поло-
жением плазмы.
114
w
Zref
Плазма в
UHFC
Z
KVS
AHFC
токамаке
HFC
и
диагностика
Z
Рис. 6. Структурная схема одноконтурной H∞-системы управления верти-
кальным положением плазмы: KVS - H∞-регулятор вертикального положения
плазмы, AHFC - модель многофазного тиристорного выпрямителя, представ-
ляющая собой инерционное динамическое звено первого порядка [28], HFC -
катушка горизонтального поля (HFC или P6 & P12).
Рис. 7. Структурная схема каскадной системы управления током в катушке
HFC и P6 & P12 и вертикальным положением плазмы: CZ - ПИД-регулятор
вертикального положения плазмы, СIHFC - ПД-регулятор тока в катушке го-
ризонтального поля, AHFC - модель многофазного тиристорного выпрямите-
ля, HFC - катушка горизонтального поля (HFC или P6 & P12).
Как было сказано в разделе 2, решение задачи синтеза ПИД-регулятора с
передаточной функцией (4) методом LMI осуществляется посредством мини-
мизации модуля статической чувствительности замкнутой системы при огра-
ничениях, наложенных на H∞-нормы передаточных функций замкнутой си-
стемы.
Для сведения этой задачи к виду системы линейных матричных нера-
венств необходимо осуществить переход от передаточных функций замкнутой
системы к частотным передаточным функциям этой системы,
s -→ jω, W (s) -→ W (jω),
а далее к набору значений этих частотных передаточных функций на вы-
бранном частотном диапазоне ωk ∈ [ω1, ωN ], k = 1, . . . , N,
W (jω) -→ W (jωk) = Wk.
Потом на основе определений H∞-нормы матричной функции и спектраль-
ной нормы матрицы
∥W (jω)∥∞ = supσmax (W(jω)) -→ ∥Wk∥2 = σmax (Wk), k = 1,... ,N,
ω
115
где σmax - максимальное сингулярное число матрицы, сингулярные числа
матрицы G вычисляются по формулам
√
√
σi = + λi (GHG) = + λi (GGH),
λi - собственные значения матрицы, GH - комплексно-сопряженное транс-
понирование матрицы G, происходит переход от задачи на ограничение
H∞-норм передаточных функций к задаче на ограничение набора спектраль-
ных норм (модулей в скалярном случае) значений этих передаточных функ-
ций на выбранных частотах:
⎧
⎧
⎪
min
(P (0)KI )-1
,
⎪
min
(P (0)KI )-1
,
⎪
2
⎪
2
⎪
⎪
s.t.
∥S(s)∥∞ ≤ Smax,
s.t.
∥Sk∥2 ≤ Smax,
⎨
⎨
∥T(s)∥∞ ≤ Tmax,
∥Tk∥2 ≤ Tmax,
⎪
-→ ⎪⎪
⎪
⎪
∥Q(s)∥∞ ≤ Qmax,
∥Qk∥2 ≤ Qmax,
⎪
⎪
⎩
⎩
∥R(s)∥∞ ≤ Rmax
∥Rk∥2 ≤ Rmax.
Значение частотной передаточной функции ПИД-регулятора на часто-
те ωk при этом будет иметь вид
1
jωk
Ck = KP +
KI +
KD.
jωk
1+τjωk
Используя лемму [30] для сведения задачи на ограничение спектральной
нормы матрицы к виду матричного неравенства
∥M∥2 ≤ γ ⇐⇒ MHM≺γ2I,
можно сформулировать задачу синтеза ПИД-регулятора в виде системы мат-
ричных неравенств. На примере значения дополнительной функции чувстви-
тельности на частоте ωk данный переход выглядит так:
∥Tk∥2 ≤ Tmax ⇐⇒
(
)-1
⇐⇒
I+PHkCHk
CHkPHkPkCk (I + PkCk)-1 ≼ T2maxI ⇐⇒
(
∕
)
⇐⇒ (I + PkCk)H (I + PkCk) ≽
1
T2max
(PkCk)H (PkCk).
Таким образом, задача синтеза ПИД-регулятора сводится к решению сле-
дующей системы квадратичных матричных неравенств:
⎧
⎪
max μ,
⎪
⎪
s.t. (P (0)KI )H (P (0)KI ) ≽ μ2I,
⎪
⎨
(
∕
)
(I + PkCk)H (I + PkCk) ≽
1
S2max
I,
(5)
(
∕
)
⎪
(I + PkCk)H (I + PkCk) ≽
1
T2max
(PkCk)H (PkCk) ,
⎪
(
∕
)
⎪
⎪
(I + PkCk)H (I + PkCk) ≽
1
Q2max
CHkCk,
⎩
(
∕
)
(I + PkCk) (I + PkCk)H ≽
1
R2max
PkPHk,
116
где Pk = P (jωk), Pk ∈ Cq×m - значение частотной передаточной функции мо-
дели объекта на частоте ωk, Ck - значение частотной передаточной функ-
ции ПИД-регулятора на частоте ωk, μ - скаляр, посредством максимизации
которого решается задача минимизация спектральной нормы матрицы ста-
тической чувствительности (P (0)KI )-1. Систему (5) необходимо решить для
каждой частоты ωk ∈ [ω1, ωN ] из выбранного частотного интервала. Таким
образом, требуется решить систему из 4N + 1 неравенств. Матричные нера-
венства в системе не являются линейными относительно неизвестных пара-
метров регулятора, более того, левая часть неравенств не является выпуклой,
ее необходимо свести к системе LMI посредством выпукло-вогнутой процеду-
ры (convex-concave procedure) [31]. Выпукло-вогнутая процедура — эвристи-
ческий метод, используемый в этой работе для поиска локальных решений
системы (5) путем итеративного решения эквивалентной системы LMI, кото-
рая получается введением дополнительной матриц
Z:
ZHZ ≽ YHY,
(
)H (
)
Z
Z
Z
Z
=ZH
Z
ZHZ
ZHZ ≽ 0,
(
)H (
)
ZHZ ≽ Z
Z
Z
Z
≽YHY.
Используя лемму о дополнении по Шуру [22, 30], можно получить линей-
ное матричное неравенство
[
]
ZHZ
ZHZ
ZH
Z YH
≽ 0.
Y
I
На примере квадратичного матричного неравенства для дополнительной
функции чувствительности из (5) данный переход к LMI выглядит так:
[
]
ZHk
Zk
ZHkZk
ZHk
Zk YHk
ZHkZk ≽ YHkYk ⇐⇒
≻0,
Yk
I
Zk = (I + PkCk), Yk = (1/Tmax)(PkCk) ,
Zk = (I + PkCcurrk),
где Ccurrk - значение частотной передаточной функции регулятора на часто-
те ωk, которое соответствует локальному оптимальному решению (5), полу-
ченному на предыдущей итерации выпукло-вогнутой процедуры. Аналогич-
ное преобразование необходимо провести для каждого квадратичного мат-
ричного неравенства в (5).
Таким образом, выпукло-вогнутая процедура используется для нахожде-
ния локальных оптимальных значений μ в (5), приближаясь при каждой ите-
рации к глобальному оптимальному значению μmax.
Решение системы LMI с помощью выпукло-вогнутой процедуры прово-
дилось на компьютере MacBook Pro с процессором Intel Core i7-4850HQ в
среде MATLAB с использованием пакета CVX и решателя систем линейных
117
матричных неравенств SDPT3. Сначала настраивается ПД-регулятор тока в
катушках HFC/P6 & P12, а затем ПИД-регулятор вертикального положения
плазмы. Решение проводилось на 500 частотах из частотного диапазона от
10-3 рад/с до 103 рад/с, таким образом для каждого регулятора решалась
система, состоящая из 4 · 500 + 1 = 2001 матричных неравенств. При синте-
зе ПД-регулятора тока в катушках HFC/P6 & P12 решение было найдено за
5 итераций и заняло 86 с, а при синтезе ПИД-регулятора вертикального по-
ложения плазмы — за 7 итераций и заняло 143 с.
7. Математическое моделирование систем управления положением плазмы
При моделировании синтезированных систем управления вертикальным
положением плазмы в вектор состояний x модели объекта вида (1) вводились
возмущения посредством подачи импульсного воздействия w на вход модели
через матрицу B1, имитирующие всплески вертикального положения плазмы,
вызываемые различными неустойчивостями и малыми срывами (сбросами
давления плазмы и ее внутренней индуктивности).
a
б
0,10
6
Z
Z
0,05
Zref
4
Zref
0
2
0
0,05
1000
0
500
0
500
500
1000
1000
104
105
1
0
0
1
5
2
10
3
20
1000
15
10
500
5
0
0,2
0,4
0,6
0,8
1,0
0
0,2
0,4
0,6
0,8
1,0
Time, s
Time, s
Рис. 8. Работа H∞-системы управления с управляющей катушкой HFC, рас-
положенной вблизи вакуумной камеры, при смещении по вертикали с ампли-
тудой: а - 8 см, б - 31 см.
118
а
б
103
0,05
4
0,04
Z
Z
2
Zref
0,03
Zref
0,02
0
0,01
0
2
1000
1000
500
500
0
0
500
500
1000
1000
200
0
0
1000
200
2000
400
3000
600
4000
0,25
0,20
4
0,15
3
0,10
2
0,05
1
0
0,2
0,4
0,6
0,8
1,0
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
Time, s
Time, s
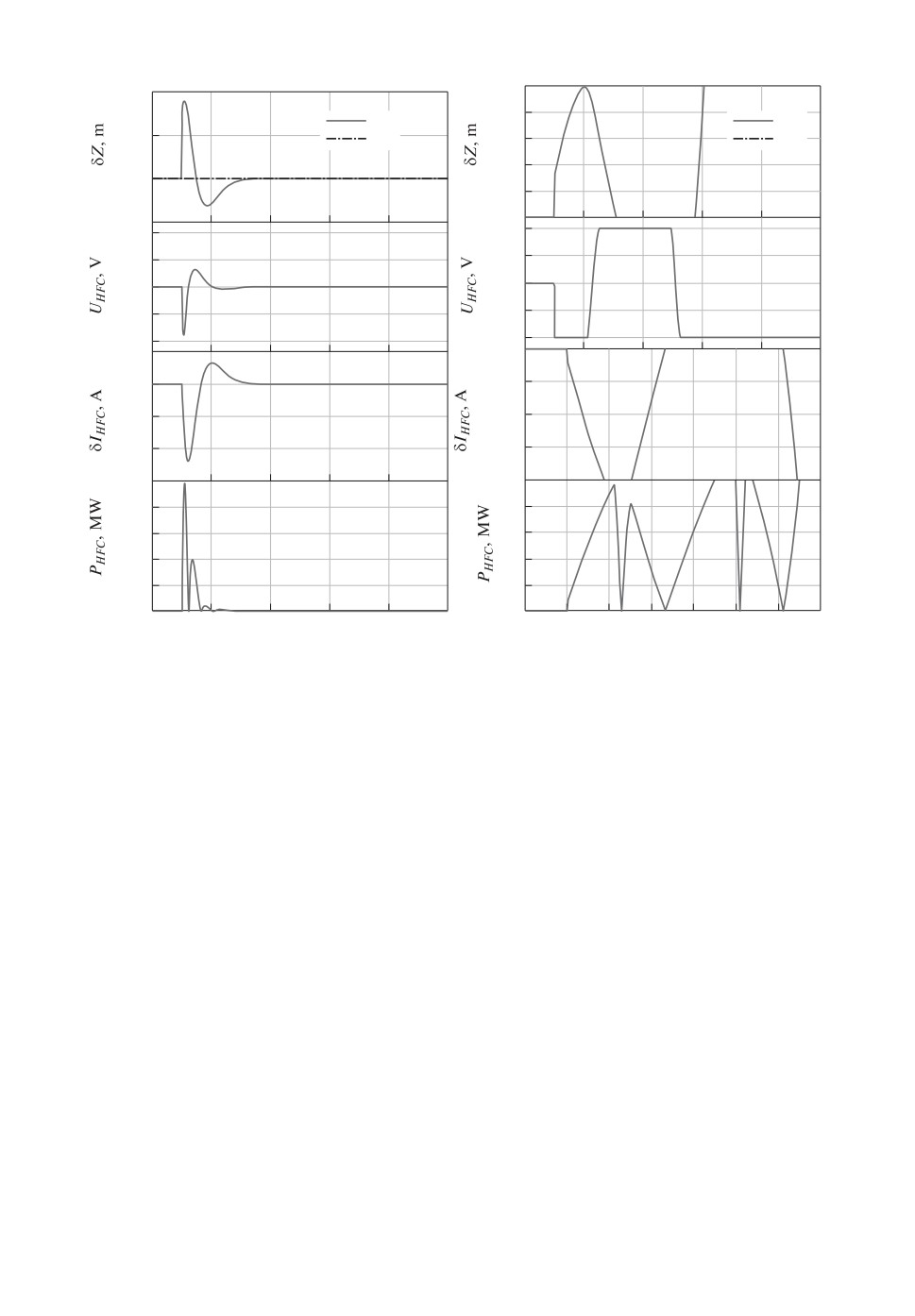
Рис.
9. Работа H∞-системы управления с управляющими катушками P6 &
P12, расположенной вблизи вакуумной камеры, при смещении по вертикали
с амплитудой: а - 3 мм, б - 15,42 мм.
7.1. H∞-система управления
Модели вертикального положения плазмы в токамаке ИГНИТОР с управ-
ляющими катушками P6 & P12 и катушкой HFC, расположенной вблизи ка-
меры, масштабированы по входу и выходу с коэффициентами 1000 В и 0,1 м
соответственно. Для них синтезированы H∞-регуляторы с весовыми функ-
циями: W1 = 10 для P6 & P12, W1(s) = s-1(0,3s + 20) для HFC.
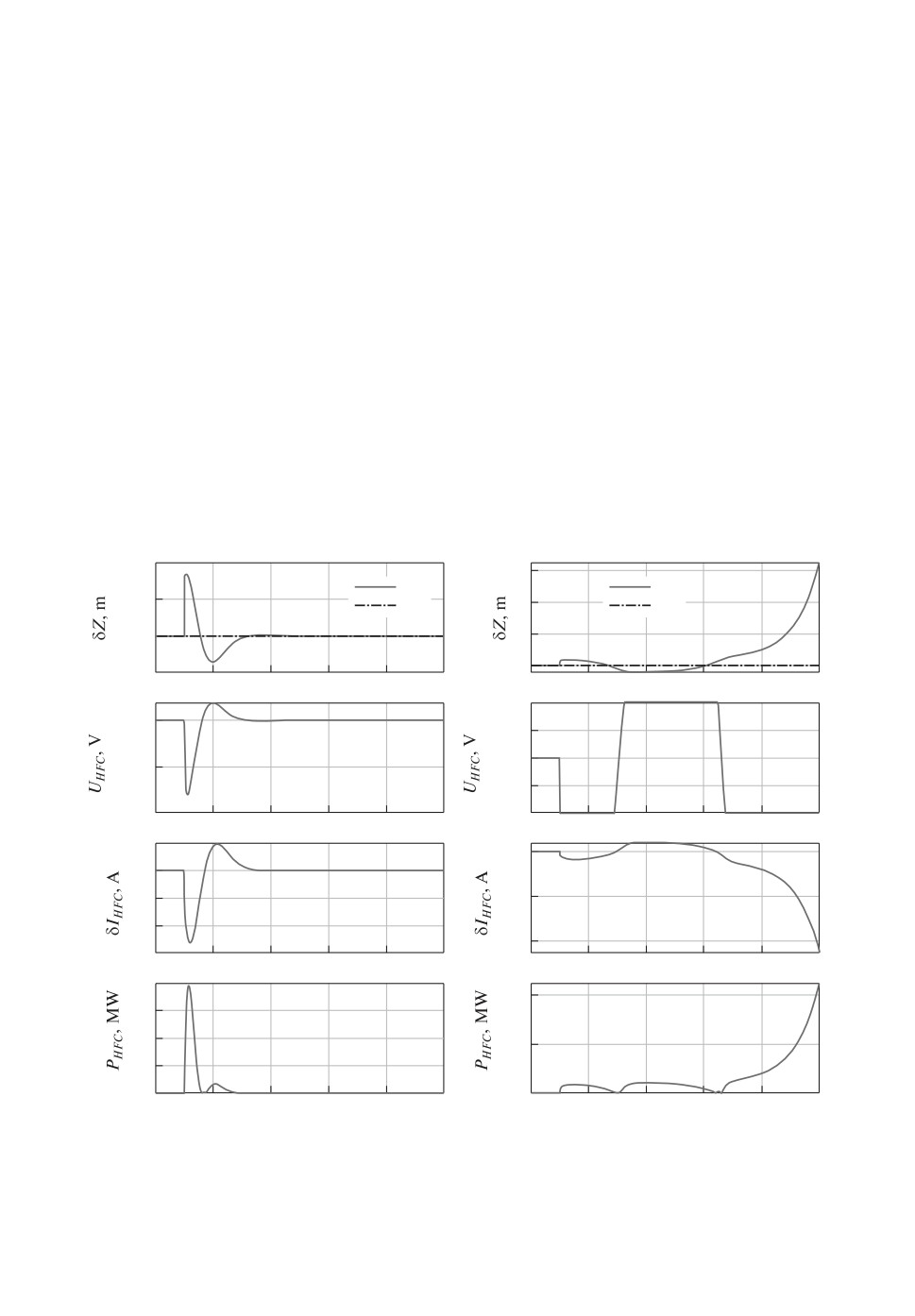
Приведены результаты для смещений относительно малой амплитуды, ко-
гда система не достигает ограничений и функционирует в линейном режиме,
а также для смещения предельно большого значения, при котором система,
еще сохраняя устойчивость, достигает ограничений на управляющие сигналы
и показывает заметно нелинейное поведение.
На рис. 8 приведены результаты моделирования H∞-системы управления
с управляющей катушкой HFC, расположенной вблизи вакуумной камеры,
при смещении по вертикали с различными значениями. На рис. 9 приведе-
ны результаты моделирования H∞-системы управления с управляющими ка-
тушками P6 & P12. На рис. 8,б и рис. 9,б приведены графики вертикального
смещения плазмы, напряжения, тока и мощности на управляющих катушках
119
а
б
50
10
5
0
0
5
50
200
1000
0
500
200
0
400
500
600
1000
10
200
0
100
10
0
20
30
100
150
10
100
5
50
0
0
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
0
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
Time, s
Time, s
Рис. 10. Работа системы управления с управляющей катушкой HFC, располо-
женной вблизи вакуумной камеры, при смещении по вертикали с амплитудой:
а - 8 см, б - 36 см.
HFC и P6 & P12 соответственно для величин возмущений, при которых си-
стемы теряют устойчивость. Система с катушкой HFC парирует возмущение,
сохраняя устойчивость, при смещениях по вертикали амплитудой до 30 см;
система с катушкой P6 & P12 — при смещениях амплитудой до 1,5 см.
7.2. LMI система управления
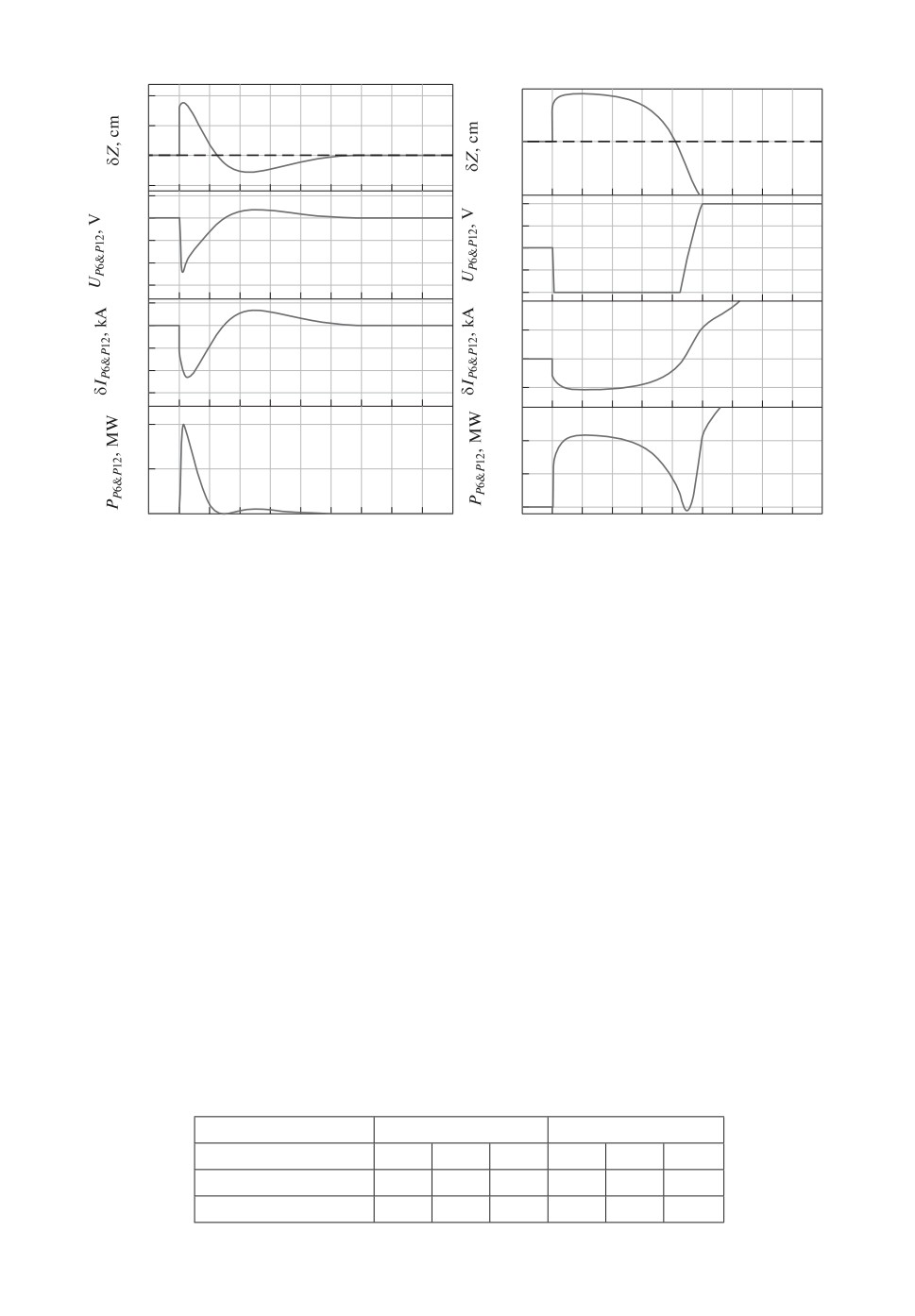
Было проведено моделирование синтезированных методом LMI систем
управления при смещениях по вертикали различной амплитуды. Результа-
ты моделирования для системы с управляющей катушкой HFC показаны на
рис. 10. В этом случае система может отрабатывать вертикальные смещения
положения плазмы амплитудой до 8 см (рис. 10,а), не выходя при этом за
установленный предел мощности в 10 МВт, при смещениях большей ампли-
туды система выходит за предел мощности 10 МВт, хотя и отрабатывает сме-
Таблица 1. Результаты моделирования систем с катушками
HFC и P6 & P12
Катушки
HFC
P6 & P12
δZmax, мм
80
200
300
3,5
6
42
δIHFCmax, кА
26
56,5
82,6
0,48
0,74
4,26
PHFCmax, МВт
18,6
56,8
89,3
0,25
0,56
4,1
120
а
б
5
3
2
0
1
5
0
10
1
15
1000
1000
500
500
0
0
500
500
1000
1000
1
0
0
1
5
2
3
10
4
10
2
5
0
2
0
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
0
0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
Time, s
Time, s
Рис. 11. Работа системы управления с управляющей катушкой P6 & P12 при
смещении по вертикали с амплитудой: а - 16 мм, б - 17 мм.
щения в пределах области управляемости. Система теряет устойчивость при
смещениях с амплитудой более 35 см, на рис. 10,б видно, что при смещении с
амплитудой 36 см система теряет устойчивость. Поскольку расстояние между
плазмой и верхней стенкой вакуумной камеры в рассматриваемом сценарии
составляет около 5 см, катушка HFC позволяет парировать все смещения,
изначально не подразумевающие соприкосновение плазмы с камерой.
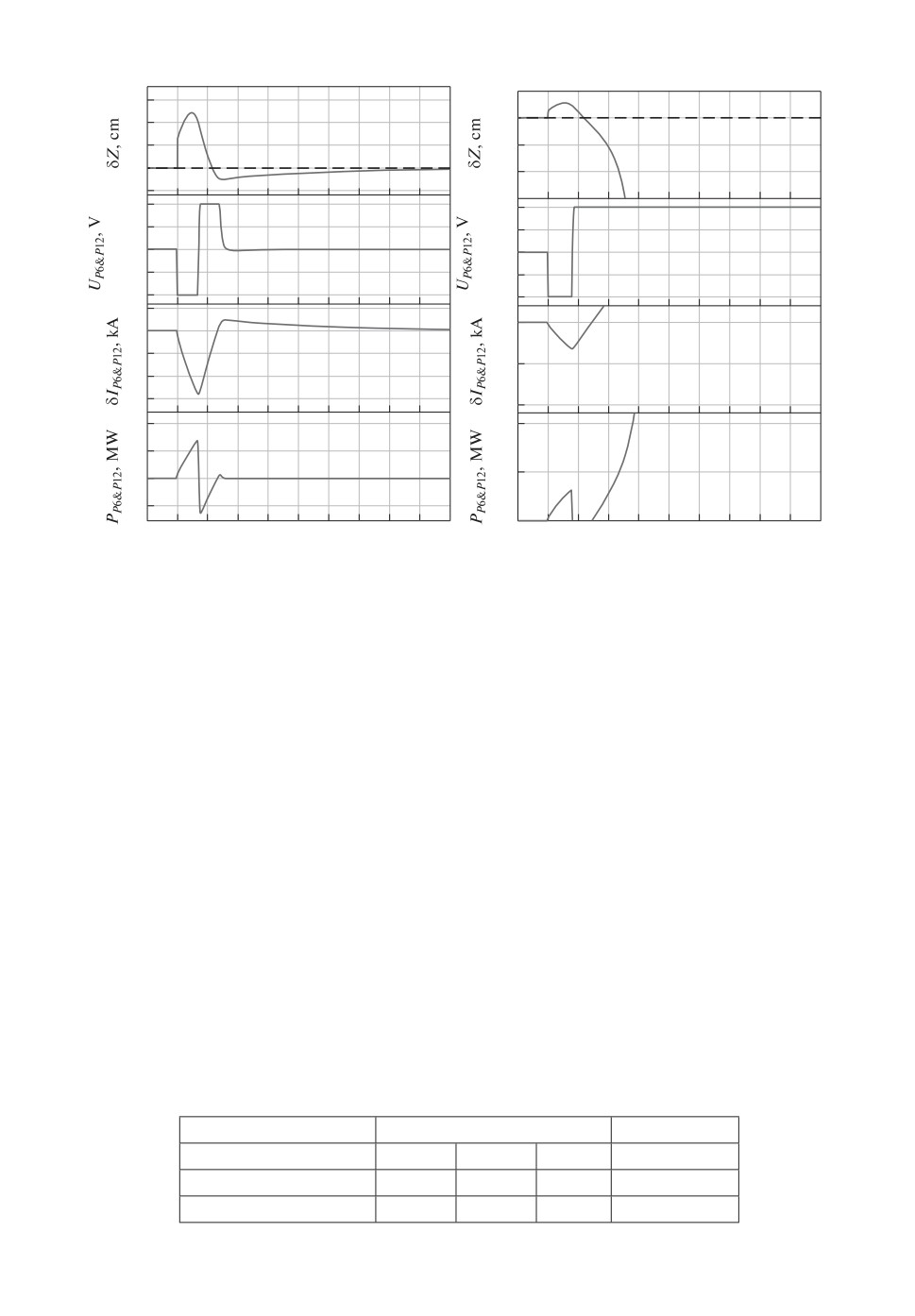
Результаты моделирования конфигурации токамака ИГНИТОР с управ-
ляющей парой катушек P6 & P12 показаны на рис. 11: в этом случае система
теряет устойчивость при смещениях с амплитудой более 1,6 см. На рис. 11,б
приведена работа системы при смещении 1,7 см, теряющей при этом устойчи-
вость. На рис. 11,а приведена работа системы при смещении 1,6 см без потери
устойчивости, максимальная мощность при этом составляет 2,8 МВт.
В табл. 2 приведены предельные значения сигналов, когда система управ-
ления сохраняет устойчивость при координатном возмущении по вертикали.
Таблица 2. Результаты моделирования систем с катушками
HFC и P6 & P12
Катушки
HFC
P6 & P12
δZmax, мм
87
219
430
24
δIHFCmax, кА
22
56,4
102
2,8
PHFCmax, МВт
9,97
56,4
102
2,78
121
8. Заключение
В работе были синтезированы линейные неустойчивые модели плазмы в
токамаке ИГНИТОР, которые позволили вычислить области управляемости
плазмы по вертикали при ограниченном напряжении на двух видах кату-
шек горизонтального поля HFC и PF6&PF12, а также синтезированы ро-
бастные системы управления вертикальным положением плазмы методами
Н∞-оптимизации и LMI.
В результате математического моделирования в среде MATLAB/Simulink
было установлено, что построенные методом H∞-оптимизации системы
управления способны парировать смещения плазмы по вертикали амплиту-
дой не более 1,5 см для управляющей пары катушек PF6&PF12 и не более
30 см для расположенной вблизи камеры управляющей катушки HFC, а си-
стемы, построенные методом LMI, — не более 1,6 см и не более 35 см соот-
ветственно.
Поскольку нет гарантий, что в токамаке ИГНИТОР не будет вертикаль-
ных смещений с амплитудой более 1,6 см, авторы предлагают добавить ка-
тушку HFC в полоидальную систему токамака ИГНИТОР между вакуумной
камерой и катушкой тороидального поля (рис. 3,б ). Катушка HFC позволит
создать область управляемости, превосходящую возможный диапазон дви-
жения плазмы по вертикали (±5 см), что обеспечит парирование системой
управления вертикальным положением плазмы малых срывов и значительно
повысит надежность всей системы управления положением, током и формой
плазмы в токамаке ИГНИТОР.
Авторы благодарят сотрудников АО «ГНЦ РФ ТРИНИТИ» д-ра физ.-
мат. наук Родионова Н.Б. и канд. физ.-мат. наук Докуку В.Н. за полезные
обсуждения и предоставленные данные токамака ИГНИТОР.
СПИСОК ЛИТЕРАТУРЫ
1. Wesson J. Tokamaks, 4 ed. Clarendon Press: Oxford, 2004.
2. Митришкин Ю.В., Карцев Н.М., Кузнецов Е.А., Коростелев А.Я. Методы и
системы магнитного управления плазмой в токамаках. 1-e изд. М.: КРАСАНД,
2020.
3. Ariola M., Pironti A. Magnetic Control of Tokamak Plasmas. Springer Int. Publish-
4. Skogestad S., Postlethwaite I. Multivariable Feedback Control (2nd ed.). Chichester:
John Wiley & Sons Ltd, 2005.
5. Митришкин Ю.В., Коренев П.С., Прохоров А.А. Управление плазмой в тока-
маках. Ч. 1 // Проблемы управления. 2018. № 1. С. 2-20.
6. Митришкин Ю.В., Карцев Н.М., Павлова Е.А. Управление плазмой в Токама-
ках. Ч. 2 // Проблемы управления. 2018. № 2. С. 2-30.
7. Митришкин Ю.В., Карцев Н.М., Коньков А.Е. Управление плазмой в токама-
ках. Ч. 3.1 // Проблемы управления. 2019. № 3. С. 3-15.
8. Митришкин Ю.В., Карцев Н.М., Коньков А.Е. Управление плазмой токамаках.
Ч. 3.2 // Проблемы управления. 2019. № 4. С. 15-26.
122
9.
Villone F., Albanese R., Ambrosino G. et al. Strategies for the plasma position and
shape control in Ignitor // Fusion Engin. Design. V. 82. No. 5. P. 1036-1044.
10.
Докука В.Н., Гостев А.А., Хайрутдинов Р.Р. Расчет наводимых напряжений в
обмотках полоидального поля токамака ИГНИТОР в процессе срыва плазмы по
вертикали // ВАНТ. Термоядерный синтез. 2018. Т. 41. Вып. 3. С. 93-104.
11.
Mitrishkin Y.V., Korenev P.S., Konkov A.E. New horizontal and vertical field
coils with optimised location for robust decentralized plasma position control in
the IGNITOR tokamak // Fusion Engin. Design. 2022. V. 174. 112993. P. 1-20.
DOI:10.1016/j.fusengdes.2021.112993.
12.
Бутковский А.Г. Фазовые портреты управляемых динамических систем. М.:
Наука, 1985.
13.
McFarlane D., Glover K. Robust Controller Design Using Normalized Coprime
Factor Plant Description / Lecture Notes in Control Inform. Sci. V. 138. Springer-
Verlag, 1989.
14.
McFarlane D., Glover K. A Loop Shaping Design Procedure Using H∞ Synthesis //
IEEE Trans. Autom. Control. 1992. V. 37. No. 6. P. 759-769.
15.
Boyd S., Hast M., Astrom K.J. MIMO PID tuning via iterated LMI restric-
tion // Int. J. Robust Nonlinear Control. 2016. V. 26. No. 8. P. 1718-1731.
16.
Stein G. Respect the Unstable // IEEE Control Systems. 2003. V. 23. No. 4. P. 12-25.
17.
Humphreys D.A., Casper T., Eidietis N., Ferrara M., et al. Experimental vertical
stability studies for ITER performance and design // Nuclear Fusion. 2009. V. 49.
18.
Халил Х.К. Нелинейные системы. М.-Ижевск: НИЦ «Регулярная и хаотическая
динамика», Институт компьютерных исследований, 2009.
19.
Андреев Ю.Н. Управление конечномерными линейными объектами // Главная
редакция физико-математической литературы издательства «Наука», 1976.
20.
Polyak B.T. Optimization and control: mutual connections. Optimization Without
Borders Sirius. Online presentation. July 12, 2021.
21.
Glover K., McFarlane D. Robust stabilization of normalize coprime factor plant
descriptions with H∞ bounded uncertainty // IEEE Trans. Autom. Control. 1989.
No. 8. P. 821-830.
22.
Поляк Б.Т., Хлебников М.В., Щербаков П.С. Управление системами при внеш-
них возмущениях. Техника линейных матричных неравенств. М.: ЛЕНАНД,
2014.
23.
Doyle J.C., Glover K., Khargonekar P.P., Francis B.A. State-space solutions to
standard H2 and H∞ control problems // IEEE Trans. Autom. Control. No. 8.
P. 831-847.
24.
Wang L. PID Control System Design and Automatic Tuning using MATLAB/
Simulink. JohnWiley & Sons Ltd, 2020.
25.
Филлипс Ч., Харбор Р. Системы управления с обратной связью. М.: Лаборато-
рия базовых знаний, 2001.
26.
Митришкин Ю.В., Карцев Н.С., Зенков С.М. Стабилизация неустойчивого вер-
тикального положения плазмы в токамаке Т-15. Часть I // АиТ. 2014. № 2.
С. 129-145.
27.
Митришкин Ю.В., Карцев Н.С., Зенков С.М. Стабилизация неустойчивого вер-
тикального положения плазмы в токамаке Т-15. Часть II // АиТ. 2014. № 9.
С. 31-44.
123
28. Mitrishkin Y.V., Pavlova E.A., Kuznetsov E.A. Continuous, saturation, and discon-
tinuous tokamak plasma vertical position control systems // Fusion Engin. Design.
29. Konkov A.E., Mitrishkin Y.V., Korenev P.S. Robust Cascade LMI Design of MIMO
Control System for Plasma Position, Current, and Shape Model with Time-Varying
Parameters in a Tokamak // IFAC-PapersOnLine. 2020. V. 53. No. 2. P. 7344-7349.
30. Duan G., Yu H. LMIs in Control Systems. Analysis, Design and Applications //
CRC Press. 2013.
31. Lipp T., Boyd S. Variations and Extensions of the Convex-Concave Procedure //
Optim. Engin. 2014. V. 17. No. 2. P. 263-287.
Статья представлена к публикации членом редколлегии М.В. Хлебниковым.
Поступила в редакцию 08.10.2021
После доработки 22.12.2021
Принята к публикации 30.12.2021
124