Автоматика и телемеханика, № 6, 2022
© 2022 г. С.А. ШУМСКИЙ, канд. физ.-мат. наук
(serge.shumsky@gmail.com)
(Московский физико-технический институт)
ADAM — МОДЕЛЬ ИСКУССТВЕННОЙ ПСИХИКИ1
Предложена модель искусственной психики ADAM, реализующая
иерархическую архитектуру глубокого обучения с подкреплением. ADAM
способен обучаться все более сложным и протяженным во времени пове-
денческим навыкам по мере увеличения количества управляющих уров-
ней искусственной психики. Целенаправленное поведение формируется
иерархической обучающейся системой с постепенным наращиванием чис-
ла уровней, где каждый иерархический уровень ответственен за свой вре-
менной масштаб поведения.
Ключевые слова: общий искусственный интеллект, глубокое обучение с
подкреплением, иерархическая система управления.
DOI: 10.31857/S0005231022060034, EDN: ACIMYZ
1. Введение
Под искусственным интеллектом (ИИ) обычно понимают алгоритмы ре-
шения различных интеллектуальных (когнитивных) задач на уровне чело-
века или лучше. В разные времена под “интеллектуальными” понимались
разные типы задач. В 1950-е гг. таковыми считались “творческие” задачи,
в которых невозможно предусмотреть заранее все варианты решений: игра
в шахматы, доказательство теорем, машинный перевод. С течением времени
область ИИ расширялась и пополнялась другими типами когнитивных задач,
уже не связанными с логическим интеллектом, например задачи распозна-
вания образов и моделирования целесообразного поведения животных [1].
Однако все современные системы машинного интеллекта имитируют каж-
дая лишь какую-то одну очень узкую область человеческих способностей,
т.е. являются слабым ИИ. Задача создания сильного ИИ , способного кон-
курировать с человеком во всех областях, до недавнего времени на прак-
тике даже и не ставилась. Считалось, что это проблема очень отдаленного
будущего.
Перелом во взглядах ИИ-сообщества на сильный ИИ произошел в послед-
ние несколько лет после свершившейся в 2010-х революции глубокого обуче-
ния. В ходе этой (все еще продолжающейся) революции происходит смена
1 Работа выполнена при частичной финансовой поддержке Центра компетенций На-
циональной технологической инициативы по направлению “Искусственный интеллект” при
МФТИ.
24
основной парадигмы ИИ. Мейнстрим ИИ сместился в область обучения ис-
кусственных нейросетей, и место ИИ, основанного на человеческих знаниях,
занимает теперь ИИ, основанный на машинном обучении, которому удается
решать практически все задачи ИИ в единой методологии, причем с гораздо
лучшим качеством, чем прежде [2]. Лидеры революции глубокого обучения
сегодня предсказывают переход от моделирования систем бессознательного
сенсорного интеллекта к по-настоящему разумным машинам, самостоятельно
планирующим свое поведение и “понимающим”, что и зачем они делают [3].
Появление таких разумных машин создаст новый массовый рынок автоном-
ных роботов, способных к обучению, в отличие от современных роботов с
программируемым поведением.
Иными словами, главной задачей следующего этапа развития ИИ являет-
ся синтез всех видов интеллекта — сенсорного, моторного, стратегического
и других в единой искусственной психике, называемой в англоязычной ли-
тературе общим ИИ — Artificial General Intelligence (AGI). Именно такую
цель — создание искусственной психики роботов, позволяющей им самостоя-
тельно планировать достижение поставленных целей и осуществлять эти пла-
ны, адаптируясь к изменяющейся обстановке, — ставит перед собой лабора-
тория Когнитивных архитектур МФТИ.
2. Когнитивные архитектуры
Искусственная психика представляет собой целостную систему со своей
когнитивной архитектурой, которая определяет все ее базовые свойства.
Поэтому разработка искусственной психики, как и любой сложной системы,
должна начинаться именно с проектирования ее архитектуры. Как и архи-
тектура фон-Неймановских компьютеров, когнитивная архитектура подра-
зумевает исполнение самых разных алгоритмов. В традиционных когнитив-
ных архитектурах эти алгоритмы (включающие знания об устройстве мира
и полезные навыки поведения в этом мире) были в основном рукотворны-
ми [4]. Мы ставим перед собой задачу, чтобы эти алгоритмы не закладыва-
лись извне в готовом виде, а возникали в процессе активного взаимодействия
искусственной психики с внешней средой путем обучения с подкрепления-
ми. Такая постановка задачи, по нашему мнению и согласно [5], наиболее
близка к определению AGI. Отличительной чертой нашего подхода являет-
ся попытка воспроизвести в нашей когнитивной архитектуре базовые черты
вычислительной архитектуры человеческого мозга.
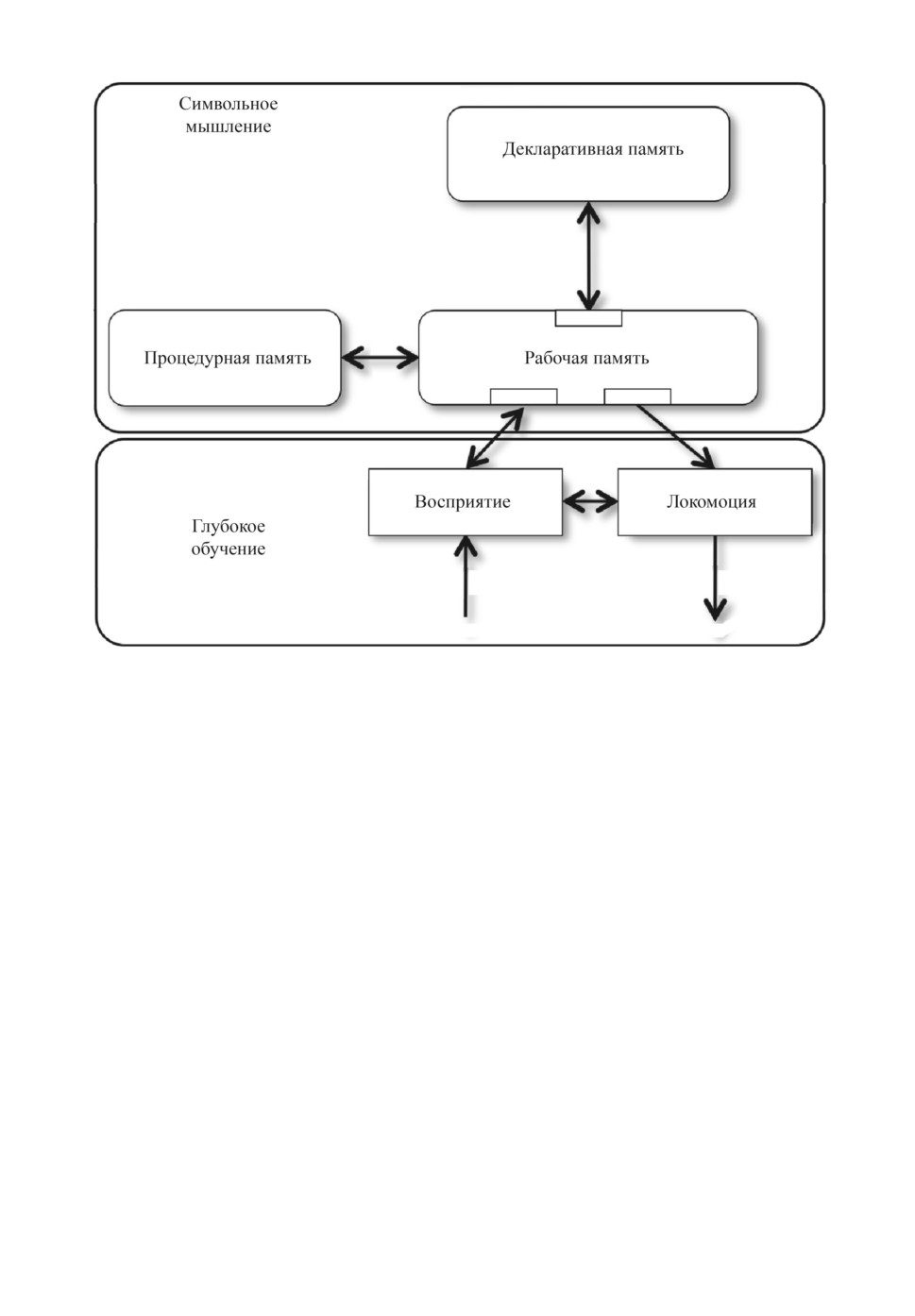
Несколько огрубляя, базовая схема современных когнитивных архитектур
может быть суммирована в так называемой стандартной модели интеллек-
та [6], описывающей схему взаимодействия основных типов когнитивных мо-
дулей искусственной психики. Как видно из рис. 1, связующим звеном между
всеми когнитивными модулями является оперативная рабочая память, соот-
ветствующая текущей активности в коре мозга. Содержимое рабочей памяти
контролируется моделями поведения в базальных ганглиях, управляющих
текущей активностью коры — операциями, хранящимися в долговременной
25
Рис. 1. Стандартная модель интеллекта (Standard Model for the Mind [6]).
процедурной памяти. Элементы долговременной декларативной памяти коры
при активации поступают в рабочую память. Все когнитивные архитектуры,
объединяемые стандартной моделью, используют знания, представленные в
символьной форме (факты и правила). Интерфейс символьной рабочей па-
мяти с векторным физическим пространством обеспечивается специальными
кодирующими и декодирующими модулями — соответственно сенсорными и
моторными, в качестве которых могут выступать современные глубокие ней-
росети.
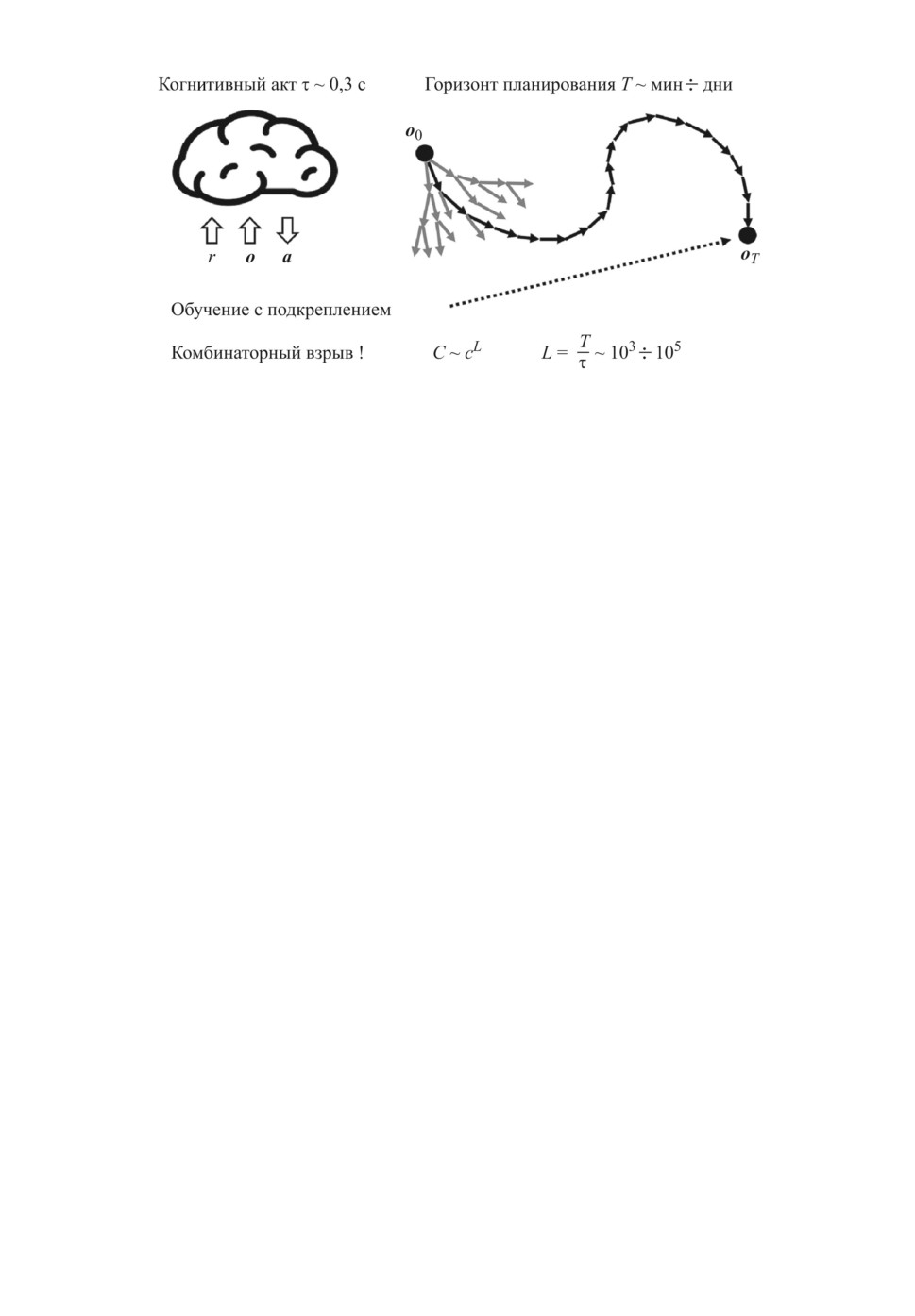
Важнейшим элементом стандартной модели является идея когнитивного
акта, стандартной операции выбора и исполнения одного из правил про-
цедурной памяти. Любое сколь угодно сложное поведение состоит из таких
элементарных когнитивных актов длительностью в десятые доли секунды.
Вся сложность нашего мышления и поведения возникает в результате пра-
вильно подобранных цепочек элементарных когнитивных актов. Стандарт-
ная модель суммирует наши знания о механизмах работы мозга и структуре
нашей психики. Но она не дает ответа, каким именно образом выстраиваются
неимоверно длинные осмысленные цепочки когнитивных актов, как органи-
зовано планирование нашего поведения на больших масштабах времени — от
минут до дней, месяцев и даже лет (см. рис. 2).
26
Рис. 2. Основная проблема машинного мышления — переход от единичного
когнитивного акта к большим горизонтам планирования. Здесь: r - подкреп-
ления, o - наблюдения, a - действия, C - разнообразие возможных цепочек
действий, характеризующее сложность поиска оптимальной стратегии, c -
разнообразие действий на каждом шаге, L - количество шагов на горизонт
планирования T .
Планы в стандартной модели могут задаваться в виде иерархии правил
процедурной памяти, где отдельные действия могут содержать в себе раз-
личные этапы. Но эти иерархии правил закладываются в них вручную, а не
возникают автоматически, в отличие от иерархии признаков, автоматически
возникающих в результате обучения глубоких нейросетей. Как пишет автор
классического современного учебника по ИИ Стюарт Рассел: “В настоящее
время все существующие методы иерархического планирования опираются на
сгенерированные человеком иерархии абстрактных и конкретных действий.
Мы еще не понимаем, как такие иерархии могут быть получены путем обу-
чения” [7].
Действительно, хотя в последнее десятилетие ручное программирование
правил поведения и уступает место глубокому обучению с подкреплением,
обеспечив тем самым прорыв в уровне стратегического игрового интеллек-
та, иерархическое планирование в глубоком обучении до сих пор отсутству-
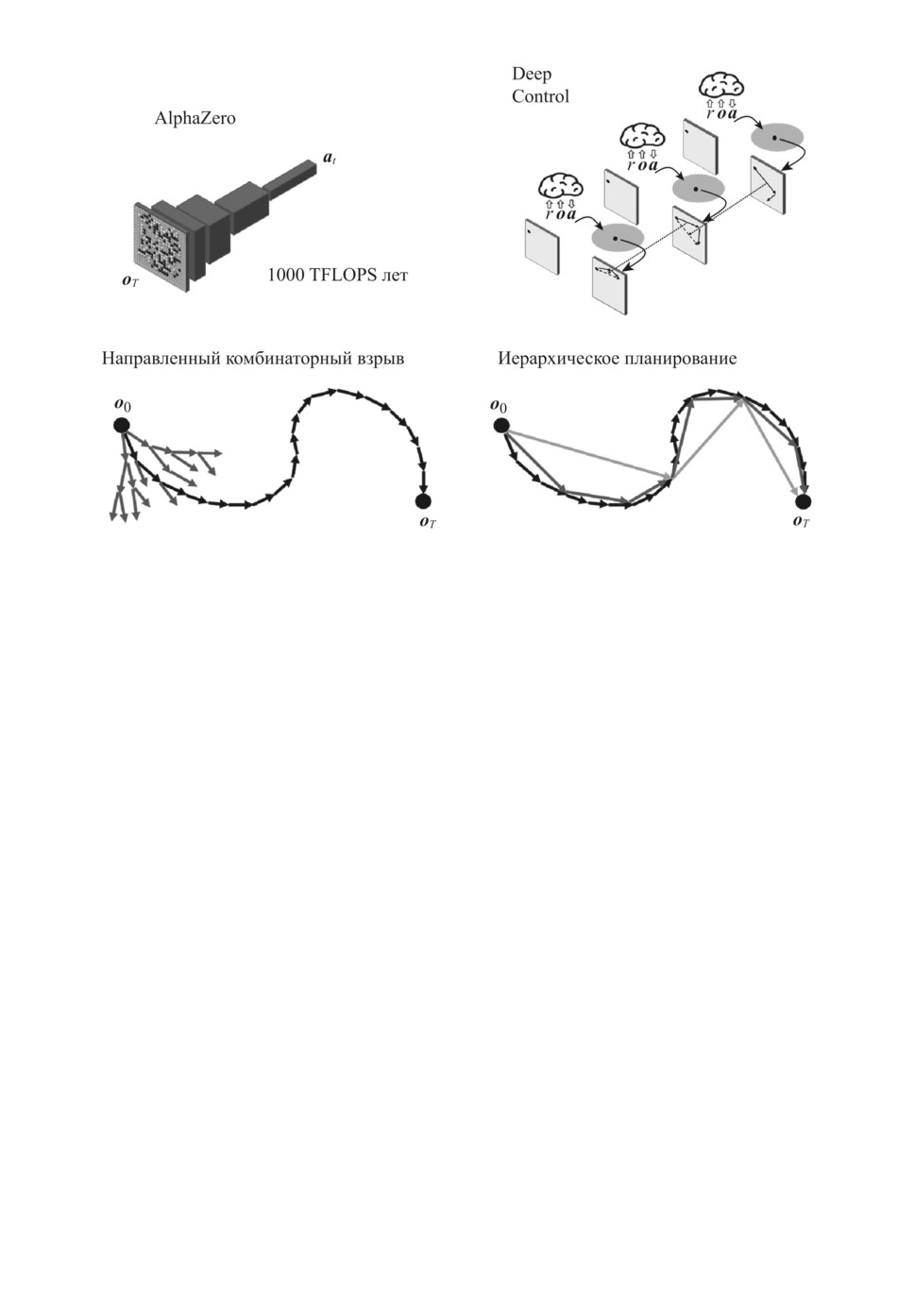
ет. Так, успех известной программы AlphaZero обеспечивается потрясающей
интуицией ее глубокой нейросети, обученной правильно оценивать любую иг-
ровую позицию и находить в ней наилучшие варианты ходов. Однако глубо-
кая нейросеть AlphaZero способна генерировать варианты своих ходов лишь
на один шаг вперед. Для выбора наилучшего варианта на каждом шаге
AlphaZero производит просчет очень объемного дерева вариантов на десятки
ходов вперед [8]. Это обеспечивает отличное качество игры, но очень дорогой
ценой из-за комбинаторного взрыва числа возможных комбинаций, переби-
раемых методом грубой силы.
Человеческое мышление устроено по-другому. Мы не перебираем в уме
все возможные варианты цепочек когнитивных актов, что было бы практи-
27
Рис. 3. Пошаговый просчет оптимальной траектории программой AlphaZero
(слева) и иерархическое планирование поведения от общего замысла ко все
более детальным планам в архитектуре Deep Control (справа).
чески невозможно. Вместо этого мы используем иерархии планов: от круп-
номасштабного замысла достижения цели — ко все более подробным пла-
нам его достижения. При этом разнообразие вариантов выбора на каж-
дом уровне планирования относительно невелико, а детализируются лишь
те этапы, которые реализуются в данный момент (см. рис. 3, справа вни-
зу). Именно так планируют свое поведение люди, и именно так устрое-
но планирование в предложенной автором когнитивной архитектуре Deep
Control [9], где в процессе обучения автоматически формируется иерар-
хия правил поведения по аналогии с глубоким обучением, автоматически
формирующим иерархии признаков при распознавании образов. Тем са-
мым решается проблема формирования разумного поведения с большим
горизонтом планирования, т.е. перекидывается мостик от простейшей пси-
хики животных к сложно организованному символьному мышлению чело-
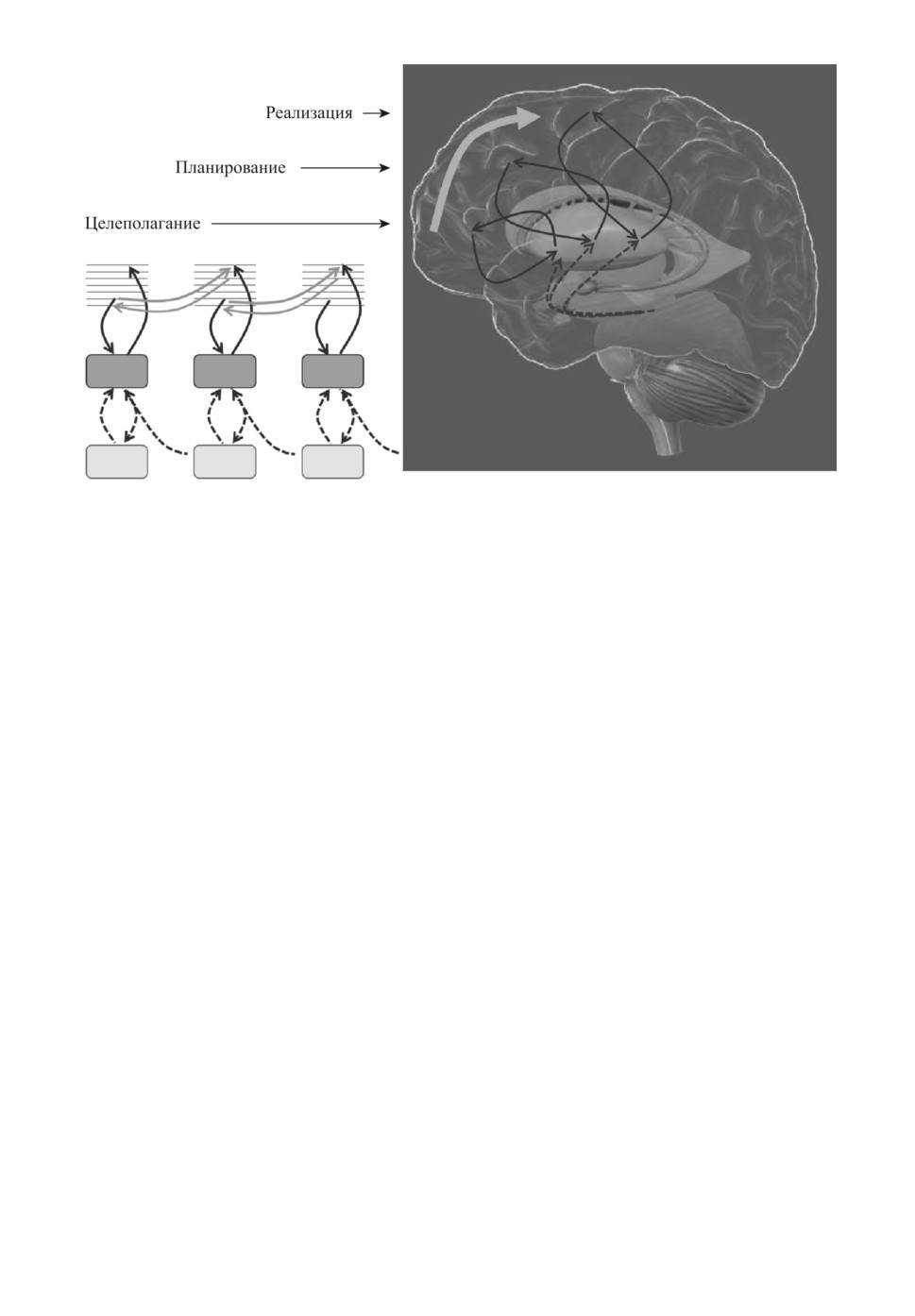
века. В отличие от стандартной модели интеллекта в архитектуру Deep
Control иерархичность встроена в явном виде, отражая иерархичность,
присущую кортико-стриарной системе нашего мозга, управляющей нашим
поведением и обучающейся с помощью дофаминовых подкреплений [10]
(см. рис. 4).
Другим определяющим принципом архитектуры Deep Control является
предиктивное управление, согласно которому наш мозг постоянно предска-
зывает будущее в контексте своих собственных управляющих воздействий
28
Рис. 4. Кортико-стриарная система мозга, управляющая целесообразным по-
ведением, устроена иерархически. Программа поведения формируется в мозге
от мотивации к планированию и далее — к реализации. Все уровни иерархии
имеют одинаковый набор модулей, представленных в различных частях коры,
базальных ганглий и дофаминовой системы среднего мозга.
(рис. 4, серые стрелки). Эта особенность нашего мозга хорошо изучена и по-
ложена в основу многих теоретических моделей мышления [11, 12], в отличие
от которых нас интересует действующая модель искусственной психики, яв-
ляющаяся результатом обратного инжиниринга архитектуры мозга.
3. Архитектура Deep Control:
иерархическое планирование поведения
В архитектуре Deep Control проблема, о которой говорит Стюарт Рас-
сел, — обучение роботов иерархическому планированию поведения — решает-
ся с использованием оригинальной технологии глубокого структурного обу-
чения [9], а именно: управление поведением на разных временных масштабах
осуществляется в разных вычислительных слоях. Чем выше слой, тем боль-
шим временным масштабом он оперирует, решая, по существу, одну и ту же
типовую задачу, как показано на рис. 5. Каждый слой управляет взаимодей-
ствием с внешним миром, предсказывая свое очередное дискретное состояние,
кодирующее на своем временном масштабе сенсомоторную информацию —
как входящую (наблюдения), так и исходящую (действия), т.е. любой план
действий сопровождается соответствующими предсказаниями наблюдений,
которые постоянно сравниваются с реальностью, поставляя материал для
обучения даже в отсутствие подкрепляющих сигналов, что выгодно отлича-
ет Deep Control от обычного глубокого обучения с подкреплением. На рис. 5
29
Рис. 5. Архитектура Deep Control представлена однотипными вычислитель-
ными слоями, осуществляющими управление поведением каждый на своем
временном масштабе. Чем выше слой, тем большим временным масштабом
он оперирует. Каждый слой находит на своем масштабе решение локальной
задачи, поставленной для него более высоким слоем, разбивая ее на подзадачи
для более низкого слоя.
показаны два первых слоя Deep Control, на примере которых мы поясним,
как именно происходит управление поведением в этой архитектуре.
Входная информация поступает в управляющую систему (искусствен-
ный мозг робота) из внешнего мира в виде единого сенсомоторного векто-
ра xt = (r, o,a)t, объединяющего показания всех сенсоров o и актуаторов a
управляемой системы (тела робота) в данный момент дискретного време-
ни. Показания одного из сенсоров выделены в отдельный подкрепляющий
сигнал r, который служит для обучения системы и обрабатывается особым
30
N k образов → N . k символов
x → (s1s2 ... sk)
Рис. 6. Дискретное кодирование в Кодере.
образом. В ответ управляющая система выдает прогноз следующего сенсо-
моторного вектора в очередной момент времени xt+1 = (r, ô, a)t+1, а именно:
прогноз показаний всех сенсоров, которые она не контролирует, и реальные
управляющие сигналы для всех актуаторов управляемой системы, которые
она контролирует.
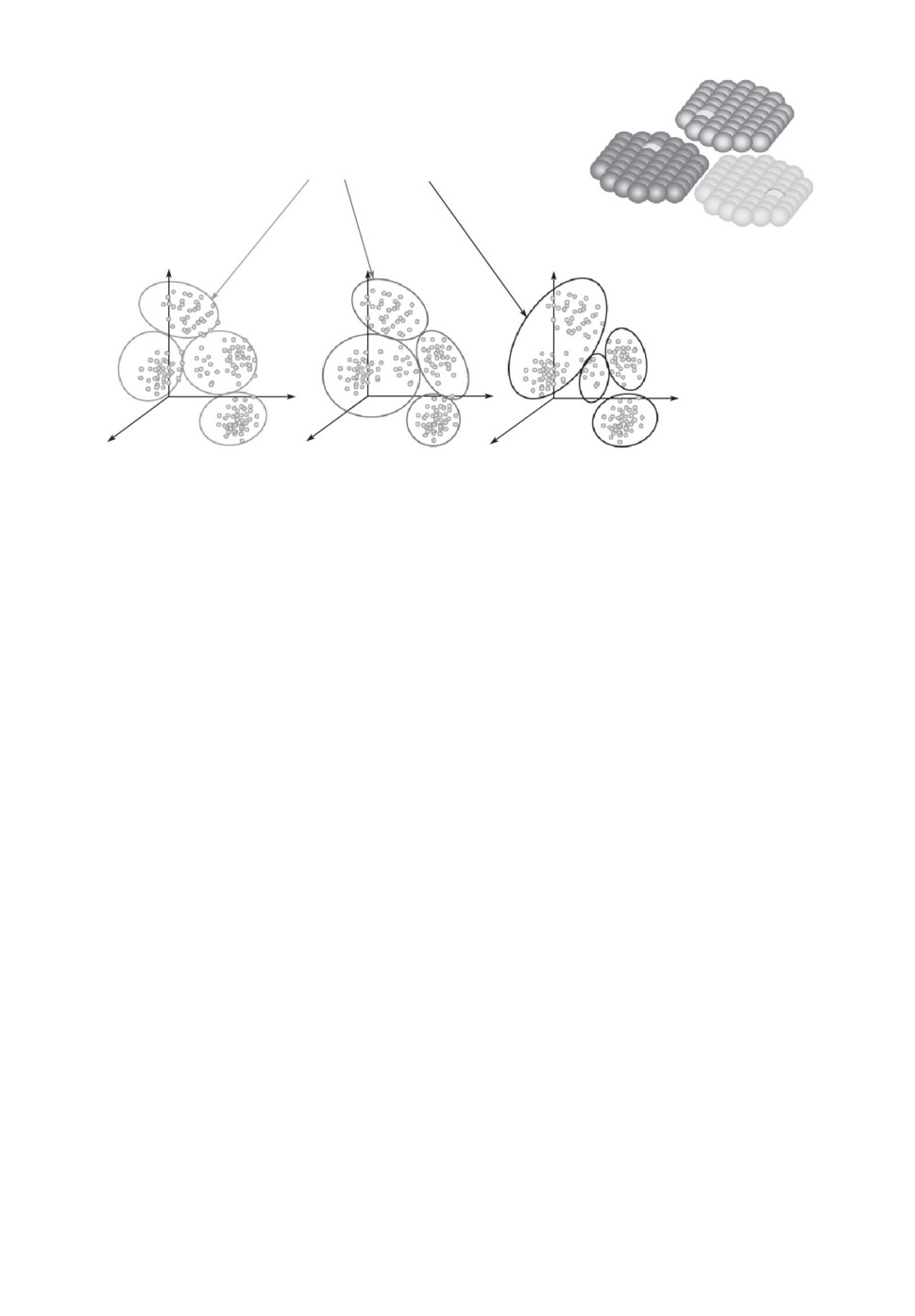
Входным элементом каждого слоя является Кодер, который кодирует
непрерывный векторный сигнал набором дискретных символов xt → st, т.е.
осуществляет дискретное кодирование. В простейшем варианте Кодер состо-
ит из нескольких модулей, каждый из которых производит свой вариант кла-
стеризации входных векторов, сохраненных в эпизодической памяти. Как
показано на рис. 6, разнообразие дискретных кодов возрастает экспоненци-
ально с числом модулей, так что требуемого для управления разнообразия
всегда можно добиться даже с небольшим числом модулей. Так, например,
7 модулей по 30 кластеров в каждом достаточно для кодирования более чем
1010 образов (верхняя оценка количества когнитивных актов за всю челове-
ческую жизнь).
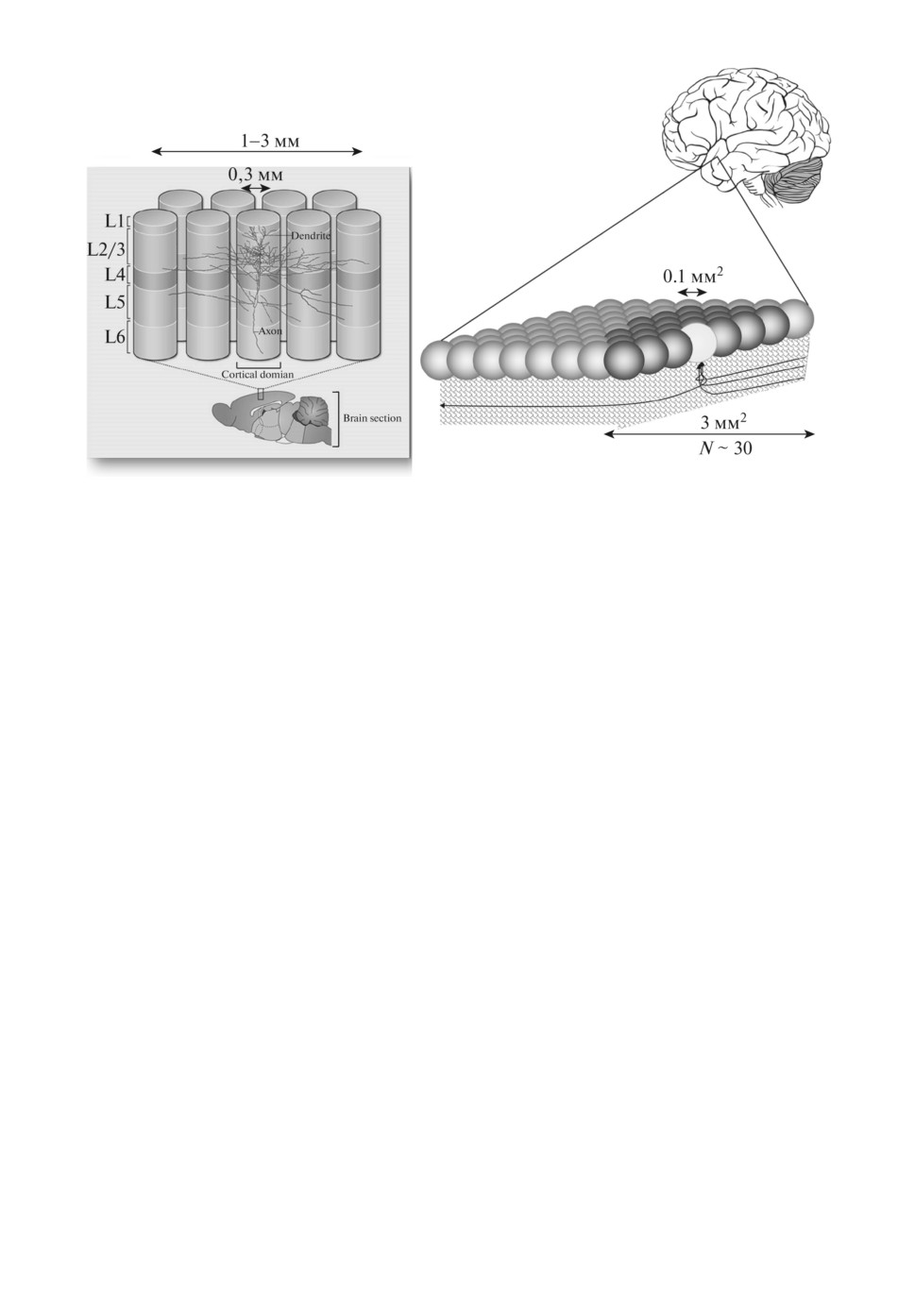
В мозге дискретное кодирование производится гиперколонками неокор-
текса, так как из-за взаимной конкуренции колонок активной в каждой ги-
перколонке может быть лишь одна колонка. Такие гиперколонки размером
порядка 1 мм2 были экспериментально исследованы Маунткаслом [13], а их
теоретическая модель предложена Кохоненом [14] (см. рис. 7).
Дискретный сигнал из Кодера передается в Парсер, аналог рабочей памяти
в стандартной модели. Парсером обычно называют синтаксический анализа-
тор, структурирующий входные данные. В нашем случае Парсер производит
анализ временного ряда из поступающих к нему символов, выделяя в нем
характерные цепочки символов, морфемы wt. Таким образом, Парсер фор-
31
Рис. 7. Дискретное кодирование в неокортексе.
мирует укрупненное описание текущего контекста уже в виде цепочек мор-
фем, а не символов. По мере накопления опыта Парсер обучается выявлять
все более крупные морфемы, рекурсивно объединяя между собой наиболее
часто встречающиеся пары более коротких морфем, начиная с единичных
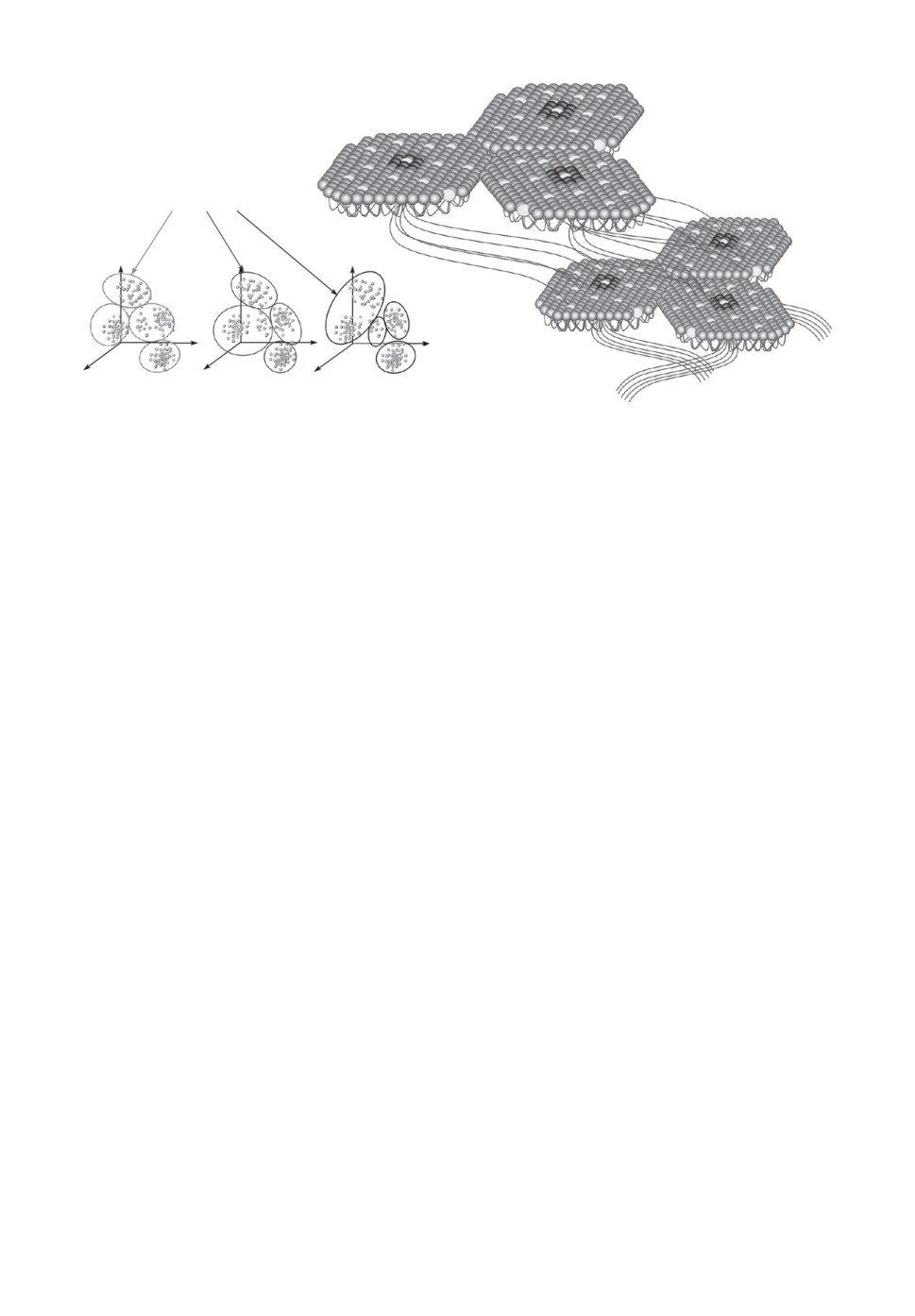
символов. Выявление и запоминание морфем в мозге может осуществлять-
ся гипотетическими рекурсивными модулями коры, отличающимися тем, что
они “смотрят” сами на себя и поэтому способны кодировать временные после-
довательности (рис. 8).
Силы ассоциативных связей между кодами морфем, отражающие то, как
часто морфема w′ следует за морфемой w, образуют Семантическую па-
мять Rww′, названную так потому, что она отражает характер употребле-
ния морфем, от которого только и зависят значения действий. Действия,
осуществляемые в сходных ситуациях, т.е. перед и после определенных дей-
ствий, имеют, очевидно, сходные назначения аналогично тому, как значения
слов в языке определяются контекстами их употребления. Семантическая
память Rww′ помнит, какие следующие морфемы (т.е. цепочки сенсомотор-
ных состояний) и насколько часто встречались в данном контексте. Как и
Кодер, Семантическая память разбита на независимые модули — головы, ра-
ботающие каждая со своим входным алфавитом символов, поступающих от
соответствующих модулей Кодера. Модульный дизайн матрицы Rww′ суще-
ственно снижает сложность и время вычислений. Это аналог нашей модели
мира, хранящейся в неокортексе, предположительно — в рекурсивных моду-
лях.
К этой модели мира надо добавить еще и модель своих собственных пред-
почтений — насколько желанны для нас различные состояния мира в кон-
тексте наших действий. Эти предпочтения, выявляемые в процессе обучения
32
MNk 0,1 мм2 ~ 1 см2
Слой L: M модулей
(s1s2...sk)
Слой L
1
Рис. 8. Гипотетические рекурсивные модули неокортекса, соответствующие
архитектуре Deep Control. Центральная гиперколонка каждого модуля с гло-
бальными связями кодирует свою входную информацию активностью одной
из своих кортикальных колонок. Окружающие ее гиперколонки с локальными
связями кодируют последовательности таких символов в центральной гипер-
колонке, т.е. морфемы.
с подкреплением, задаются отдельной функцией ценности Vw, за которую в
мозге отвечают базальные ганглии. Семантическая память и функция ценно-
сти обучаются Парсером, который распознает и порядок следования морфем,
и соответствующие им подкрепления. В простейшем случае используется ал-
горитм обучения SARSA [15]:
V (w) ← V (w) + α(r + γV (w′) - V (w)).
Модель мира и модель наших предпочтений используются Планировщи-
ком для планирования поведения. Если вычислительный слой является са-
мым верхним, то информация о текущем контексте, распознанным Парсером,
передается непосредственно Планировщику. Зная последнюю распознанную
морфему, какие морфемы могут следовать за ней и ценность каждой такой
морфемы-кандидата, Планировщик выбирает оптимальную в данном контек-
сте следующую морфему, которая и становится его текущим планом.
Этот план затем пошагово транслируется Декодеру. В первом слое Де-
кодер переводит его из символьной формы в векторную — предсказывает
следующий сенсомоторный вектор, т.е. непосредственно взаимодействует с
внешним миром. В остальных слоях Декодер формирует с помощью своей
эпизодической памяти планы для Планировщика нижележащего слоя — ран-
жированный список возможных морфем-кандидатов, из которого последний
выбирает оптимальную для текущего момента морфему. Тем самым каждый
слой выбирает наилучший вариант исполнения планов вышележащего слоя
с учетом поступающей от нижележащего слоя входной информации.
Информация от нижележащего слоя передается в вышележащий слой
Парсером в момент распознания им очередной морфемы. Эта морфема
33
передается Кодеру вышележащего слоя в форме семантического вектора
для его последующего дискретного кодирования. Семантический вектор
Xw = R...wRw... каждой морфемы определяется частотами морфем, предше-
ствующих и следующих за данной морфемой. Таким образом, морфемы, упо-
требляемые сходным образом, будут иметь близкие семантические векторы
и соответственно будут закодированы Кодером следующего слоя близкими
дискретными кодами с большим числом одинаковых компонент.
Итак, мы описали в общих чертах, как в архитектуре Deep Control про-
исходит формирование иерархии планов поведения, вложенных друг в друга
и постоянно адаптирующихся к изменяющимся внешним обстоятельствам.
Заметим, что от нас не требовалось задавать никаких правил поведения.
Все паттерны поведения, кодируемые морфемами на каждом временном мас-
штабе, появляются автоматически в процессе активного взаимодействия си-
стемы с внешним миром на основе полученных при этом данных. Искус-
ственный мозг с такой архитектурой способен автоматически формировать
свою картину мира и постоянно совершенствовать свое поведение, нацелен-
ное на максимизацию ожидаемого потока подкреплений. Он не ограничен
решением какой-то одной определенной задачи и может накапливать опыт
решения разных задач в разных контекстах, постоянно накапливая знания
о мире и своем опыте взаимодействия с ним. Можно сказать, что он об-
ладает свободой воли, так как он исполняет лишь свои собственные пла-
ны, вырабатываемые на верхнем (мотивационном) слое иерархии. Управле-
ние его поведением, например нацеливание на решение определенной зада-
чи, происходит не директивно, а через управление подкреплениями, напри-
мер увеличением соответствующей награды, чтобы повлиять на его текущую
мотивацию.
4. ADAM: прототип искусственной психики роботов
ADAM (Adaptive Deep Autonomous Machine) представляет собой дейст-
вующий прототип искусственной психики с архитектурой Deep Control, раз-
рабатываемый в лаборатории Когнитивных архитектур МФТИ с целью про-
верить работоспособность предложенного подхода и апробировать различные
алгоритмы обучения для новой архитектуры [16]. Разработанная и отлажен-
ная в рамках проекта ADAM архитектура сильного ИИ может использовать-
ся в самых разных сервисах и продуктах, требующих креативного машинно-
го мышления. Мы надеемся, что эта архитектура будет положена в основу
будущих операционных систем роботов и специализированных чипов их ис-
кусственного мозга.
ADAM представляет собой программу на языке Julia, управляющую по-
ведением робота или программного агента в симуляторе реальности:
Environment (a, o)t → (r, o)t+1.
34
Псевдокод ADAM может быть представлен в следующем виде:
ADAM(parameters,(r, o, a)1:t) → (r, o, a)t+1
track_record[1] ← explore_environment() # gather initial learning data
adam ← new_adam(parameters) # create new adam
adam.layer[L=1] ← new_layer(adam, track_record[1]) # adam’s first layer
while(stop_criteria)
r, ô, a ← predict!(adam, r, o, a) # generate new action/prediction
# create next layer if needed:
if(expand_criteria) adam.layer[L+1] ←
← new_layer(adam, track_record[L+1])
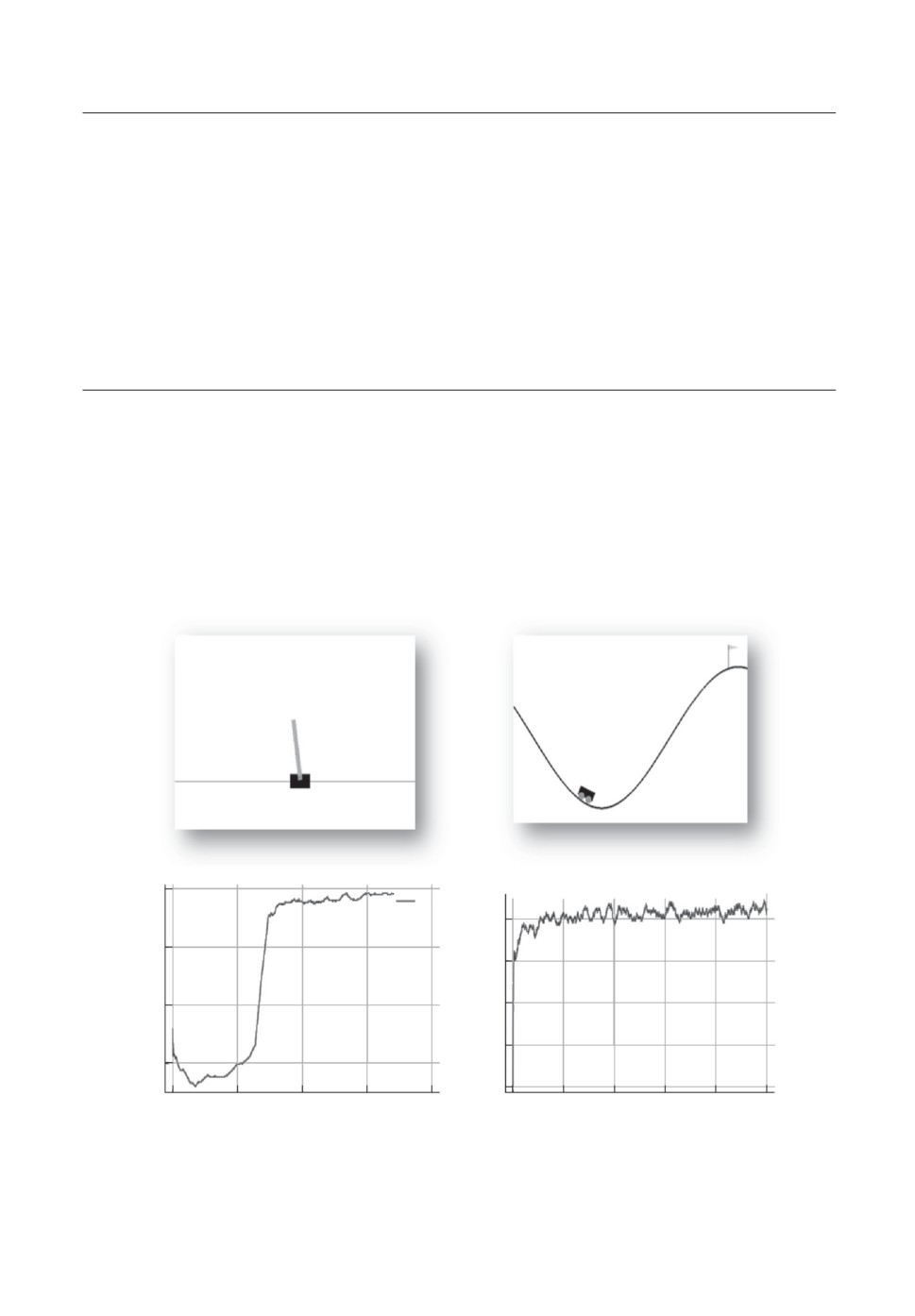
Код ADAM тестируется на задачах из коллекции OpenAI Gym, а также
используется в прикладных задачах, в частности — в автоматической бирже-
вой торговой системе, разрабатываемой в МФТИ. Предварительные резуль-
таты показывают, что ADAM действительно обучается достигать решения
задач за все более короткое время, как показано на рис. 9. В частности, в
задаче CartPole требуется научиться балансировать обратный маятник в те-
200
y1
120
150
140
100
160
180
50
0
0
2500
5000
7500
10 000
0
1000
2000
3000
4000
5000
Рис. 9. Пример обучения кода ADAM с одним вычислительным слоем задачам
CartPole и MountainCar из библиотеки OpenAI Gym. Ось абсцисс — количе-
ство эпизодов обучения, ось ординат — количество подкреплений, полученных
в каждом эпизоде.
35
чение как минимум 200 тактов, а в задаче MountainCar — достигнуть флага,
забравшись на склон быстрее, чем за 200 тактов. Причем в первом случае
дается единичная награда за каждый такт удачного балансирования, а во
втором — отрицательная единичная награда за каждый такт до достижения
флага. Как видно из рис. 9, награды, полученные в каждом эпизоде, растут
по мере обучения решения обеих задач.
5. Заключение
В данной статье описана модель искусственной психики ADAM с иерар-
хической архитектурой глубокого обучения с подкреплением Deep Control.
ADAM способен планировать свое поведение на многих масштабах време-
ни, вписывая планы более низких уровней в планы более высоких и со-
гласовывая поток планов, спускаемых сверху-вниз, с потоком сенсорной ин-
формации, поступающей снизу-вверх. По мере накопления опыта взаимодей-
ствия с внешней средой и роста числа слоев ADAM обучается целенаправ-
ленному поведению на все более долгих временных масштабах. Этот под-
ход может быть использован при создании операционных систем автоном-
ных роботов, способных накапливать опыт обучения решению самых разных
задач.
СПИСОК ЛИТЕРАТУРЫ
1. Russell S., Norvig P. Artificial Intelligence: A Modern Approach. (3rd Edition).
Pearson, 2009.
2. Николенко С., Кадурин А., Архангельская Е. Глубокое обучение. Погружение
в мир нейронных сетей. Питер, 2018.
3. Bengio Y. From System-1 Deep Dearning to System-2 Deep Learning // Thirty-
third Conf. on Neural Information Processing Syst. 2019.
4. Kotseruba I., Tsotsos J.K. 40 Years of Cognitive Architectures: Core Cognitive
Abilities and Practical Applications // Artificial Intelligence Review. 2020. V. 53.
No. 1. P. 17-94.
5. Silver D., Singh S., Precup D., Sutton R.S. Reward is Enough // Artificial
Intelligence. 2021. 103535.
6. Laird J.E., Lebiere C., Rosenbloom P.S. A Standard Model of the Mind: Toward a
Common Computational Framework Across Artificial Intelligence, Cognitive Science,
Neuroscience, and Robotics // AI Magazine. 2017. V. 38. No. 4. P. 13-26.
7. Russell S. Human Compatible: Artificial Intelligence and the Problem of Control.
Viking, 2019.
8. Silver D., et al. Mastering chess and shogi by self-play with a general reinforcement
learning algorithm // arXiv preprint arXiv:1712.01815. 2017.
9. Шумский С.А. Глубокое структурное обучение: новый взгляд на обучение с под-
креплением // Сб. науч. тр. XX Всеросс. науч. конф. Нейроинформатика-2018.
Лекции по нейроинформатике. С. 11-43. М.: 2018.
10. Шумский С.А. Реинжиниринг архитектуры мозга: роль и взаимодействие основ-
ных подсистем // Сб. науч. тр. XVII Всеросс. науч. конф. Нейроинформатика-
2015. Лекции по нейроинформатике. С. 13-45. М.: 2015.
36
11. Clark A. Surfing Uncertainty: Prediction, Action, and the Embodied Mind. Oxford
University Press, 2015.
12. Friston K.J. Waves of Prediction // PLoS Biology. 2019. V. 17. No. 10. e3000426.
13. Mountcastle V.B. The Columnar Organization of the Neocortex // Brain: a journal
of neurology. 1997. V. 120. No. 4. P. 701-722.
14. Kohonen T. Self-organized Formation of Topologically Correct Feature Maps //
Biological cybernetics. 1982. V. 43. No. 1. P. 59-69.
15. Sutton R.S., Barto A.G. Reinforcement learning: An introduction. MIT press, 2018.
16. Шумский С.А., Басков О.В. Программный Агент глубокого иерархического обу-
чения с подкреплением ADAM Deep Control // Государственная регистрация
программ для ЭВМ. RU 2021660307.
Статья представлена к публикации членом редколлегии О.П. Кузнецовым.
Поступила в редакцию 31.10.2021
После доработки 21.01.2022
Принята к публикации 26.01.2022
37