Автоматика и телемеханика, № 7, 2022
Нелинейные системы
© 2022 г. А.А. ГАЛЯЕВ, чл.-корр. РАН, д-р техн. наук (galaev@ipu.ru),
П.В. ЛЫСЕНКО (pashlys@yandex.ru),
В.П. ЯХНО, канд. техн. наук (vic_iakhno@mail.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
ДВЕ ЗАДАЧИ ПЛАНИРОВАНИЯ ОПТИМАЛЬНЫХ
ТРАЕКТОРИЙ ПОДВИЖНОГО ОБЪЕКТА
В СЛУЧАЕ ВЫРОЖДЕНИЯ НЕОБХОДИМЫХ
УСЛОВИЙ ЭКСТРЕМУМА1
Рассмотрена задача планирования траектории управляемого подвиж-
ного объекта, обладающего неоднородной индикатрисой излучения, для
случая, когда необходимые условия оптимальности траектории вырож-
дены. Введены дополнительные ограничения и формализованы две оп-
тимизационные задачи. В первой задаче требуется найти оптимальный
скоростной режим объекта на заданной траектории, а во второй опти-
мальную траекторию при движении на постоянной скорости. Предложе-
ны методы и алгоритмы построения оптимальных траекторий и нахож-
дения скоростных режимов, для второй задачи найдена аналитическая
область существования решения для произвольных параметров. Анали-
тические результаты проиллюстрированы примерами.
Ключевые слова: планирование траекторий, необходимые условия экстре-
мума, индикатриса излучения.
DOI: 10.31857/S0005231022070017, EDN: ADLKXD
1. Введение
Широкое применение беспилотных аппаратов, действующих в различных
средах и решающих в автономном режиме задачи гражданской и военной на-
правленности, приводит к необходимости осуществлять планирование их мис-
сий и решать задачи траекторного управления, полагаясь на доступную ин-
формацию, поступающую по измерительным каналам и каналам связи [1-3].
Принятие решения на борту о последовательности действий или проклад-
ке маршрута управляемого подвижного объекта (УПО) должно основывать-
ся на оптимизации некоторого критерия качества, связанного с конкретной
прикладной задачей. Поскольку часто имеется недостаток измерительных и
информационных каналов и данных, то приходится использовать матема-
тические модели, описывающие появление и эволюцию сигналов физических
1 Работа П.В. Лысенко выполнена при частичной финансовой поддержке Российского
фонда фундаментальных исследований (грант № 20-38-90215).
3
полей в пространстве до момента формирования информационного признака,
определяющего этот критерий. В частности, в задаче уклонения от обнару-
жения стационарной поисковой системой критерий формируется на основе
вероятности необнаружения УПО [4-6]. Бортовое алгоритмическое и про-
граммное обеспечение должно учитывать специфику задачи планирования
траектории, в том числе и неединственность ее решения в общем случае [7-9].
Поэтому планирование траекторий УПО является наукоемкой и актуальной
задачей [10, 11].
Аналитические решения для опорных траекторий движения УПО в зада-
че уклонения от обнаружения получены для случая постоянной [12] и пере-
менной скоростей движения [13]. Численный алгоритм был разработан для
УПО с неоднородной индикатрисой рассеяния при уклонении от обнаруже-
ния радаром [14] и неоднородной индикатрисой излучения при уклонении от
обнаружения сенсором [7, 15]. Постановкам, учитывающим наличие радара в
области движения УПО, также посвящены публикации [14, 16].
Данная статья продолжает работы по планированию траекторий движе-
ния управляемых подвижных объектов (УПО), действующих в конфликтной
среде и решающих задачу уклонения от поисковых систем [17-19], и рассмат-
ривает математические аспекты планирования. В [7] получены и исследова-
ны условия вырождения необходимых и достаточных условий оптимально-
сти траекторий УПО, обладающего неоднородной индикатрисой излучения и
уклоняющегося на плоскости от неподвижного обнаружителя. В [7] был най-
ден явный вид индикатрисы излучения, который приводит к вырождению
условий оптимальности.
В настоящей статье будут рассмотрены две постановки и методы реше-
ния задач планирования траектории для случая вырожденной индикатрисы
излучения. Это задача нахождения оптимального скоростного режима УПО
при нулевом детерминанте матрицы Гессе и заданной траектории, а также
задача нахождения оптимальной траектории УПО при нулевом детерминан-
те матрицы Гессе в случае постоянной скорости движения, значение которой
должно быть определено в результате решения.
2. Постановка задачи
Будем рассматривать задачу планирования траектории подвижного объ-
екта, обладающего неоднородной индикатрисой излучения, при уклонении
на плоскости от одиночного стационарного обнаружителя. Будем полагать,
что УПО движется в поле обнаружения поисковой системы, представляю-
щей собой одиночный сенсор, расположенный в начале координат. Поэтому
рассматривается задача планирования траектории УПО, которая доставляет
минимум функционалу риска, приведенному в [7]. Задача подвижного объ-
екта перейти из начальной точки A в конечную точку B за заданное время
с минимально возможным риском на траектории.
4
Задача 1. Требуется найти траекторию (ρ∗(t),ϕ∗(t)), которая мини-
мизирует функционал
∫T
R(ρ(·), ϕ(·)) = S(ρ,ρ˙, ϕ,ϕ˙)dt =
0
(2.1)
∫T
(
)
(
)
=
ρ2 +ϕ˙2
µ/2 G arctgϕ
dt → min ,
ρ
ρ(·),ϕ(·)
0
с краевыми условиями
ρ(0) = ρA, ρ(T ) = ρB, ϕ(0) = ϕA, ϕ(T ) = ϕB.
Здесь введены координаты (ρ, ϕ), определяющие положение УПО относи-
тельно сенсора, ρ = ln r, где r
расстояния между сенсором и УПО, ϕ
полярный угол. Остановимся на случае µ = 2 и ситуации вырождения, ко-
гда детерминант матрицы Гессе равен нулю [7]. Индикатриса излучения G(β)
связана с профилем излучения УПО. Для компактности записи здесь и далее
зависимость в функциях от аргумента будет опущена, кроме случаев, когда
потребуется уточнение этой зависимости.
Определение 1. Профилем P(α) называется функция зависимости
мощности излучаемого сигнала от угла между выделенной осью, совпадаю-
щей в дальнейшем с направлением движения объекта, и направлением на
наблюдателя.
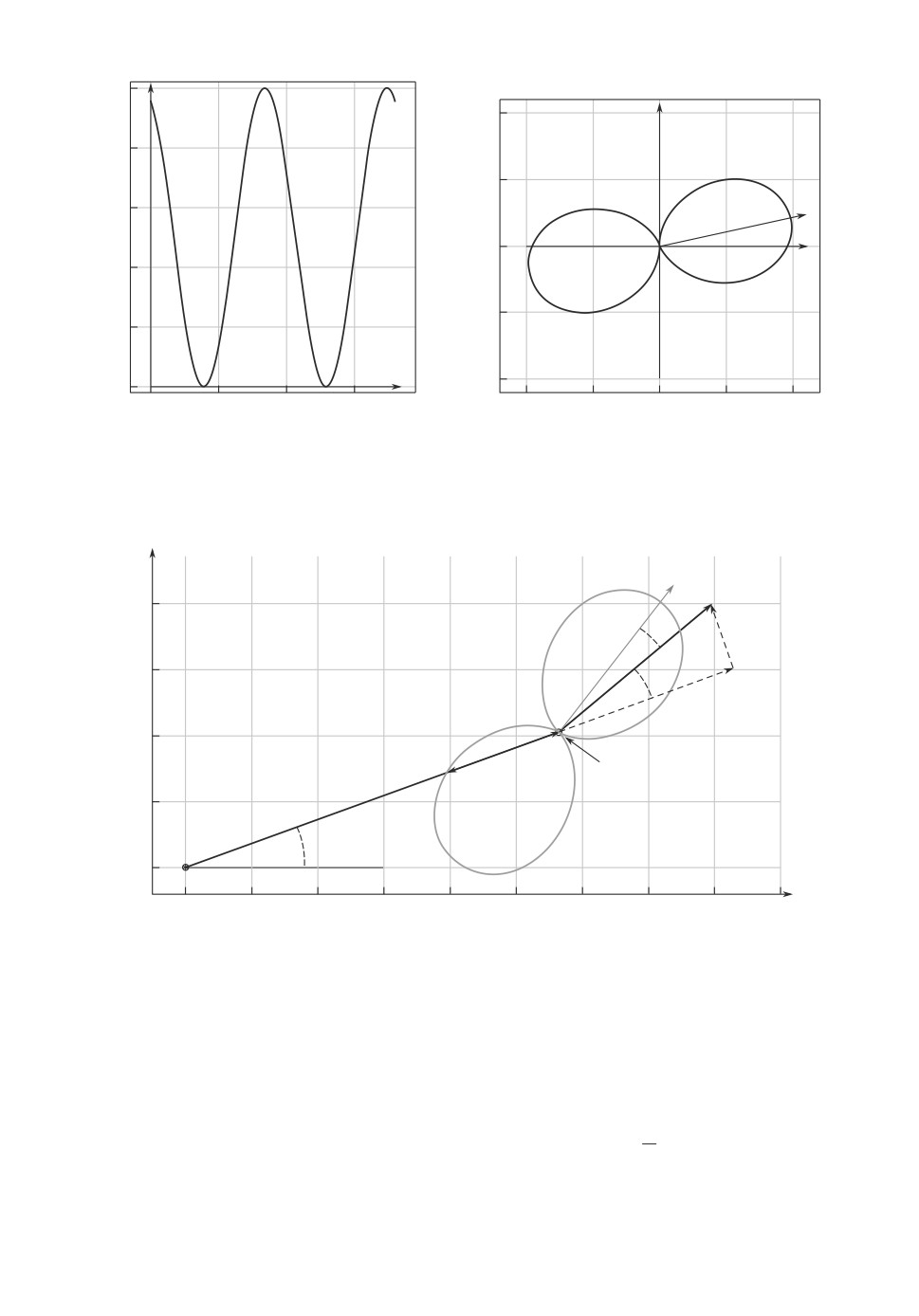
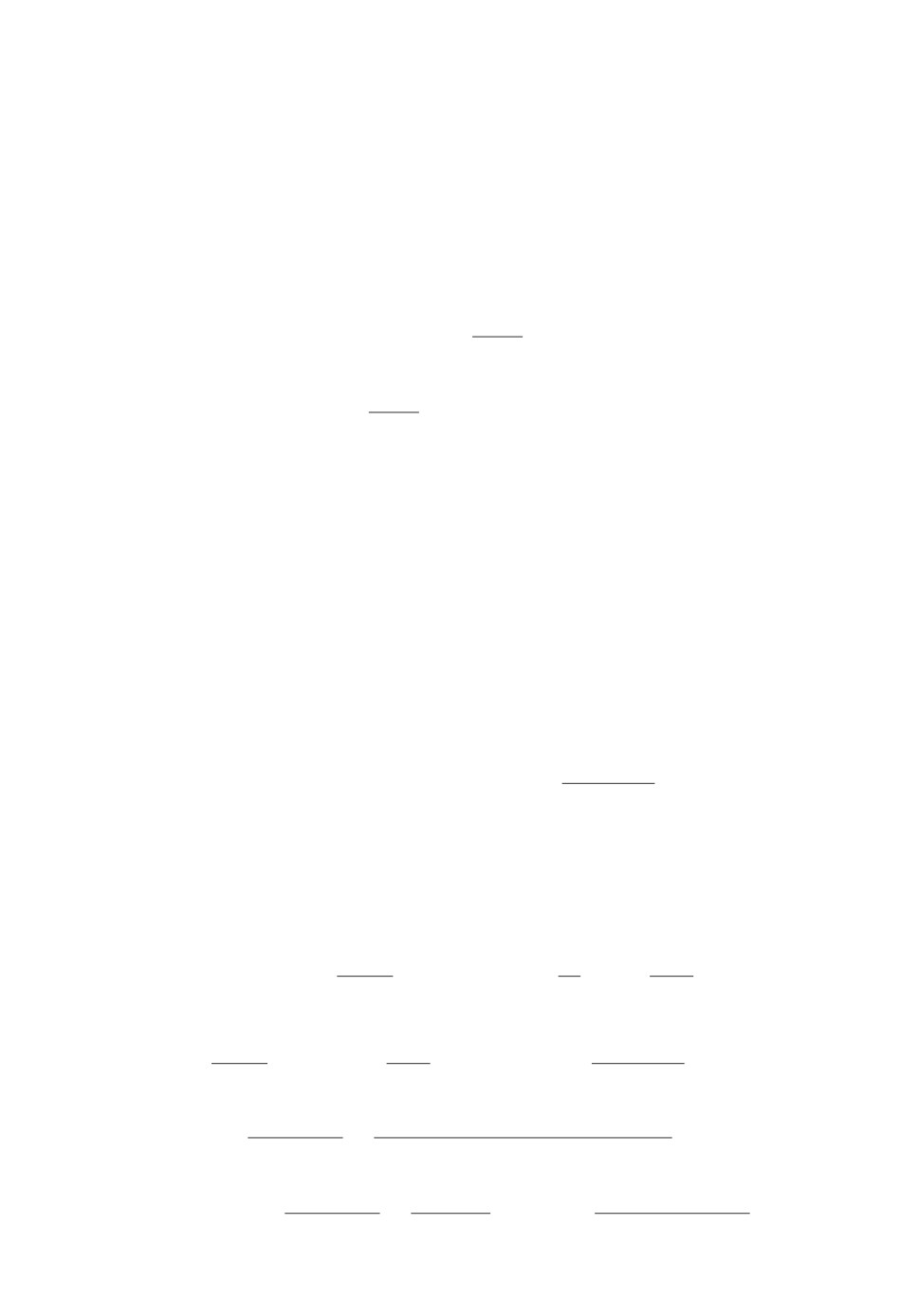
В [7] показано, что нормированный профиль P (α), соответствующий гес-
сиану, равному нулю, имеет вид
(2.2)
P (α, ν) = cos2
(α - ν),
где ν произвольная константа, определяющая различные возможные про-
фили. Профиль объекта приведен на рис. 1 (а именно случай, когда ν = 15◦).
Определение 2. Индикатриса излучения G(β) это мощность излу-
чаемого сигнала в направлении сенсора при отклонении объекта на угол β
от направления на положение объекта относительно сенсора.
Связь между профилем излучения и индикатрисой излучения поясняется на
рис. 2.
На рис. 2 cенсор находится в начале координат. Скорость УПО направлена
по отношению к отрезку, соединяющему сенсор и объект, под углом β. Ве-
личина индикатрисы излучения в сторону сенсора отмечена отрезком G(β).
Угол β, как видно из рисунка, определяется по формуле:
(
)
ϕ·r
(2.3)
β = arctg
r
5
а
б
1,0
P(a)
1,0
Y
0,8
0,5
0,6
v
0
X
0,4
-0,5
0,2
a
-1,0
0
0
100
200
300
-1,0
-0,5
0
0,5
1,0
Рис. 1. Профиль излучения с детерминантом матрицы Гессе, равным нулю:
a развертка профиля излучения; б профиль излучения на декартовой
плоскости.
Y
V
40
v
j · r
30
b
r
20
УПО
G(b)
10
j
0
Cенсор
0
10
20
30
40
50
60
70
80
90
X
Рис. 2. Геометрия направления движения, расположения УПО и сенсора.
Углы α и β связаны соотношением α = -β. Индикатриса излучения G(β, ν)
в этом случае будет иметь иметь вид
(2.4)
G(β, ν) = P (-β, ν) = cos2(-β - ν) = cos2
(ν + β).
(
)
ϕ
После замены ρ = ln r угол β принимает вид β = arctg
. Тогда подынте-
ρ
гральное выражение в (2.1) можно переписать в виде
(2.5)
S = ( ρ2 +ϕ˙2) · cos2(ν + β) = (ρ2 +ϕ˙2) · (cosν · cosβ - sinν · sinβ)2 .
6
С учетом равенств
ϕ
ρ
(2.6)
sin β =
√
,
cos β =
√
ρ2 +ϕ˙2
ρ2 +ϕ˙2
выражение (2.5) принимает вид
2
V
(2.7)
S = (ρ · cosν -ϕ˙ · sinν)2 = cos2(ν + β)
,
r2
где V модуль скорости УПО.
Теперь задача 1 может быть переформулирована следующим образом.
Задача 2. Требуется найти траекторию (вектор временных зависимо-
стей) (ρ∗(t),ϕ∗(t)), которая минимизирует функционал
∫T
(2.8)
R(ρ(·), ϕ(·)) =
( ρ · cosν -ϕ˙ · sinν)2
dt,
0
с краевыми условиями
ρ(0) = ρA, ρ(T ) = ρB, ϕ(0) = ϕA, ϕ(T ) = ϕB.
Особенностью задачи 2 является то, что из-за специального вида индикатри-
сы излучения ϕB не определяется однозначно. Краевые условия для точки B
могут отличаться на величину 2Kπ. В простейшем случае можно двигаться,
огибая сенсор с разных сторон. Более подробно этот случай рассмотрен при
решении задачи нахождения оптимальной траектории с постоянной скоро-
стью движения.
3. Особенности экстремальных траекторий,
являющихся решением задачи 2
Уравнения Эйлера задачи 2 имеют вид
∂S
= 2 · cosν · ( ρ · cosν -ϕ˙ · sinν) = const,
∂ρ
(3.1)
∂S
= -2 · sin ν · (ρ˙ · cos ν -ϕ˙ · sin ν) = const.
∂ϕ
Поскольку функция S(ρ,ρ˙, ϕ,ϕ˙) в уравнении (2.7) не зависит явным об-
разом от t, то можно записать выражение для первого интеграла уравнений
Эйлера задачи 2 в виде обобщенной функции Гамильтона, которая совпадает
с S, а именно:
∂S
∂S
ρ·
+ϕ˙·
- S = 2 · ρ · cosν · (ρ · cosν -ϕ˙ · sinν) -
∂ρ
∂ϕ
(3.2)
- 2 ·ϕ˙ · sinν · ( ρ · cosν -ϕ˙ · sinν) - S = S = const.
7
Поскольку S = const и значение функционала в оптимальном случае равно
S · T, где T время движения, то выражение ρ · cosν -ϕ˙ · sinν с точностью
√
√
до знака совпадает с
S. Обозначим C =
S и запишем это уравнение
(3.3)
ρ · cosν -ϕ˙ · sinν = σ · C,
где σ = {-1, 1}. Это уравнение вследствие (2.7) также можно записать в виде
σ · C · r(t)
(3.4)
cos(ν + β(t)) =
,
V (t)
где V
скорость движения. Если уравнение (3.3) проинтегрировать, то по-
лучим:
(3.5)
(ρ(t) - ρ(0)) · cos ν - (ϕ(t) - ϕ(0)) · sin ν = σ · C · t.
Подставляя в (3.5) время движения t = T , получим значение константы
(ρ(T ) - ρ(0)) · cos ν - (ϕ(T ) - ϕ(0)) · sin ν
(3.6)
C =
σ·T
Уравнение (3.5) можно рассматривать как параметрическое задание времени
движения по заданной параметрической траектории (ρ(p), ϕ(p))
(3.7)
(ρ(p) - ρ(0)) · cos ν - (ϕ(p) - ϕ(0)) · sin ν = σ · C · t(p),
где ρ(p), ϕ(p), t(p) непрерывные функции, p ∈ [0, 1], а значение C опреде-
ляется в (3.6). “Простым” решением, удовлетворяющим (3.3), являются ли-
ρ(T ) - ρ(0)
ϕ(T ) - ϕ(0)
нейные зависимости ρ =
иϕ˙ =
, которые, во-первых,
T
T
являются решением для всех значений угла ν, а во-вторых, индикатриса из-
лучения постоянна на всей траектории, и траектория движения в координа-
тах (ρ, ϕ) является отрезком прямой, соединяющей начальную и конечную
точки. В этом случае в декартовой системе координат решением является
логарифмическая спираль. Поэтому в дальнейшем получаемые решения для
траекторий и скоростей движения будем часто сравнивать с этим базовым ре-
шением, а значение функционала риска с его минимальным значением на
спирали [7]. Поскольку имеется только одно независимое уравнение Эйлера
для нахождения экстремали, то можно вводить дополнительные условия для
однозначного решения вариационной задачи. Постановок дополнительной за-
дачи может быть множество, но в текущей статье остановимся на двух сле-
дующих формулировках. Сначала исследуем для произвольной траектории
возможность обеспечения движения по ней таким образом, чтобы значение
функционала было минимальным. Если это возможно, то найдем оптималь-
ный скоростной режим. Далее, во второй задаче, найдем траекторию, движе-
ние по которой с постоянной скоростью обеспечивает минимальное значение
функционала риска.
8
4. Задача нахождения оптимального скоростного режима
движения по заданной траектории
В данном разделе рассматривается задача 2 для случая заданной траек-
тории УПО, а именно: задача нахождения оптимального скоростного режи-
ма движения по заданной траектории с минимальным риском для УПО с
профилем излучения (2.2), соответствующим нулевому гессиану, и парамет-
ром ν. В общем случае можно считать, что траектория задана параметри-
чески. Остановимся на классе гладких траекторий. Траектории задаются в
декартовой системе координат (x(p), y(p)) или полярной системе (r(p), ϕ(p))
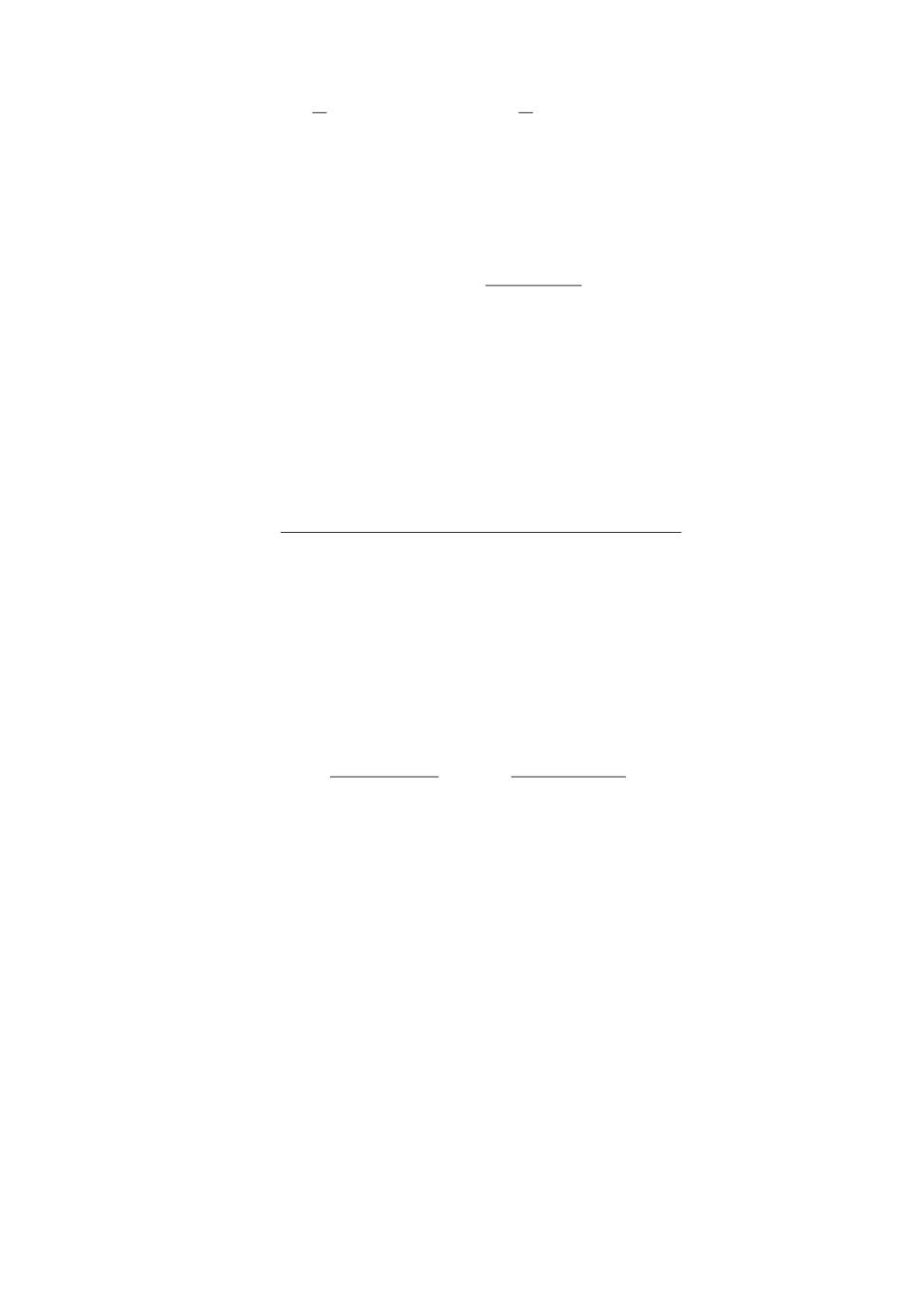
при p ∈ [0, 1]. Зафиксируем траекторию в декартовой системе координат, как
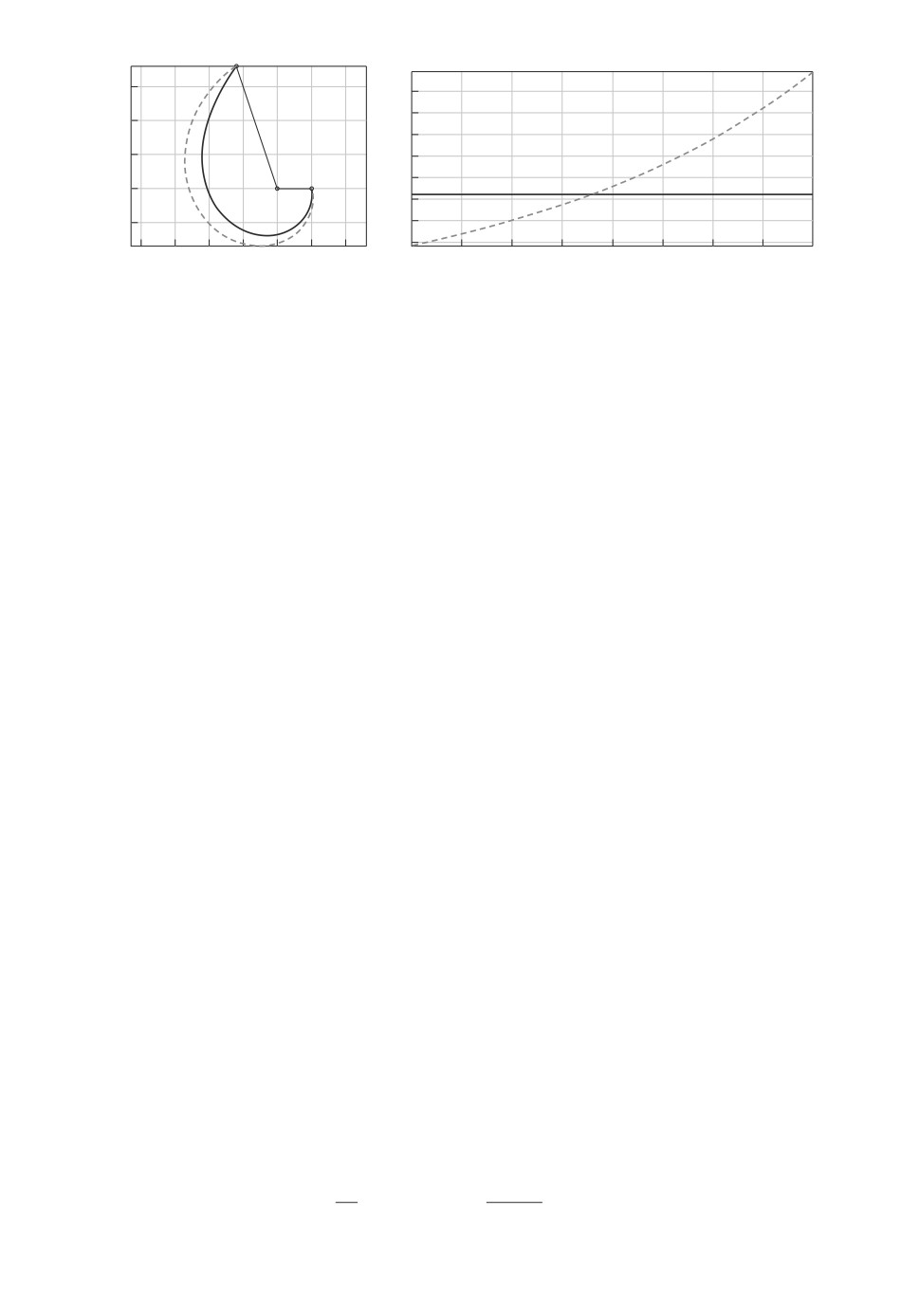
показано на рис. 3.
Перейдем в систему координат (ρ, ϕ) с начальными координатами (ρA, ϕA).
Система координат удобна тем, что основные переменные, входящие в урав-
нения, являются координатными осями, а β является углом наклона каса-
тельной к траектории, построенной в этой системе координат.
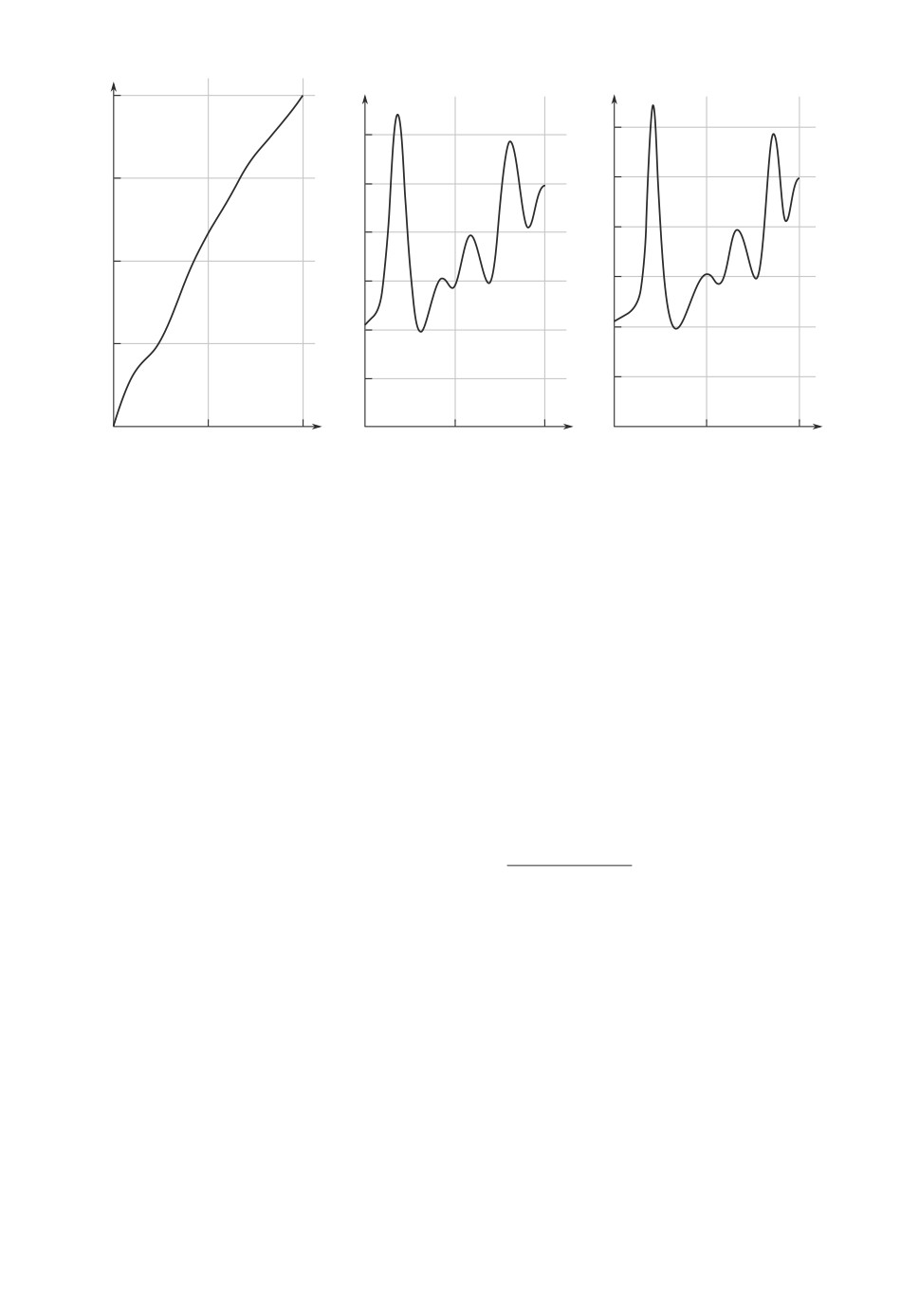
Если углы определены параметрически, то вместо переменной t восполь-
зуемся временеподобным параметром p. Траектория (ρ(p), ϕ(p)) и парамет-
рическая зависимость β(p) приведены на рис. 4.
Замечание 1. Из уравнения (3.4) следует, что значения суммы углов
ν + β(t) вдоль всей траектории должны быть такими, чтобы знак функции
cos(ν + β(t)) не изменялся.
а
б
X
Y
60
100
B
40
80
20
0
60
0,2
0,4
0,6
0,8
1,0
p
Y
150
40
100
20
50
A
0
0
0,2
0,4
0,6
0,8
1,0
20
40
60
p
X
Рис. 3. Пример траектории: a
параметрическое задание координат; б
траектория в декартовых координатах.
9
a
б
j
B
b
1,5
120
100
1,0
80
60
0,5
40
20
A
0
0
0
0,4
r - r
A
0,5
1,0 p
Рис. 4. Графики траектории и производной β(p): a траектория в координа-
тах (ρ, ϕ); б значения угла β на траектории.
Замечание 2. Пусть (ρ(p),ϕ(p))
гладкая траектория. Тогда функ-
ция t(p) из (3.7) тоже гладкая. Более того, если выполнено условие из замеча-
ния 1, то t(p) монотонно возрастающая функция. В частности, существует
обратная к ней функция p(t).
Определим значения βmax и βmin как максимальное и минимальное значе-
ния угла β(p) на траектории, а Δβ = βmax - βmin как диапазон изменения
углов. Тогда очевидно выполняется следствие из замечания 1.
Следствие 1. Если Δβ > 180◦, то движение по такой траектории с
риском, равным риску на оптимальной логарифмической спирали, невоз-
можно.
Траектории, удовлетворяющие следствию 1, в статье не рассматриваются.
В приведенном примере βmin = 1,938◦, βmax = 125,43◦ и угол β при движе-
нии по траектории пересекает значение 90◦, как показано на рис. 4, где углы
касательной к траектории становятся равными 90◦. Зоны нарушения замеча-
ния 1 отмечены штриховой линией. Однако значение Δβ = 123,492◦ < 180◦,
а значит, существует диапазон параметров ν, при котором движение с опти-
мальной скоростью возможно. Для этого находим значение максимального
угла βkr из набора углов 90◦ + k · 180◦ ≤ βmax, k ∈ Z. Тогда диапазон воз-
можных значений параметра ν, для которых выполняется замечание 1, на-
ходится внутри интервала (βkr - βmin + k · 180◦, βkr + 180◦ - βmax + k · 180◦).
Для траектории, представленной на риc. 4, βkr = 90◦, и, значит, углы ле-
жат в диапазоне ν ∈ (88,062◦; 144,57◦). Следующий интервал углов находит-
10
a
б
в
t
4
V
V
60
60
3
50
50
40
40
2
30
30
20
20
1
10
10
0
0
0
0,5
1,0 p
0,5
1,0 p
2
4
t
Рис. 5. Решение для угла ν, равного 125◦: a t(p); б V (p); в V (t).
ся при ν ∈ (268,062◦; 324,57◦), однако этот диапазон соответствует тому же
профилю.
Алгоритм решения исследуемой в разделе задачи имеет следующий вид.
Алгоритм 1 (Алгоритм нахождения V (t)).
1. Задание параметров ν, T и траектории (ρ(p), ϕ(p)).
2. Проверка замечания 1 для заданного значения ν и фиксированной тра-
ектории.
3. Если замечание 1 выполнено, то:
4. Расчет константы C из уравнения (3.6);
5. Расчет t(p) из уравнения (3.7);
C · r(p)
6. Расчет скорости по формуле V (p) =
.
cos(ν + β(p))
7. Проведение обратной замены времени и нахождение зависимости V (t) =
= V (p(t)).
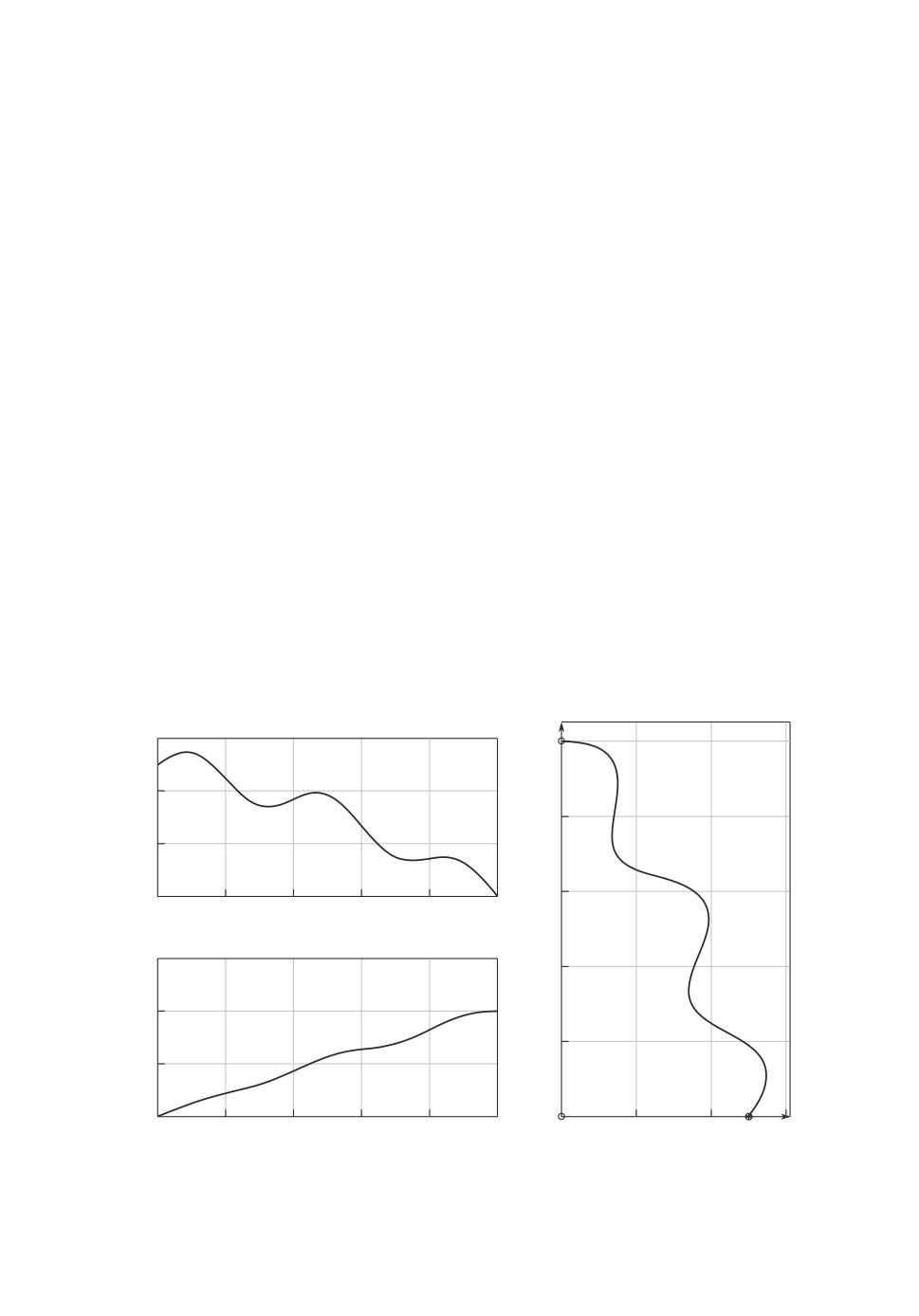
Для иллюстрации возьмем значение угла ν = 125◦, которое попадает в диа-
пазон допустимых значений ν. Функции t(p), V (p) и V (t), найденные согласно
алгоритму 1, приведены на рис. 5.
5. Задача нахождения оптимальной траектории
с постоянной скоростью движения
В разделе 4 для регуляризации задачи в качестве дополнительного второго
уравнения использовались параметризованные траектории движения. В этом
разделе в качестве дополнительного уравнения будем использовать условие
11
постоянства скорости. Тогда система уравнений имеет вид
{
ρ · cosν -ϕ˙ · sinν = σ · C,
(5.1)
r2 +ϕ˙2 · r2 = V20,
где ρ = ln r, V0 постоянная скорость на траектории. Рассмотрим следующий
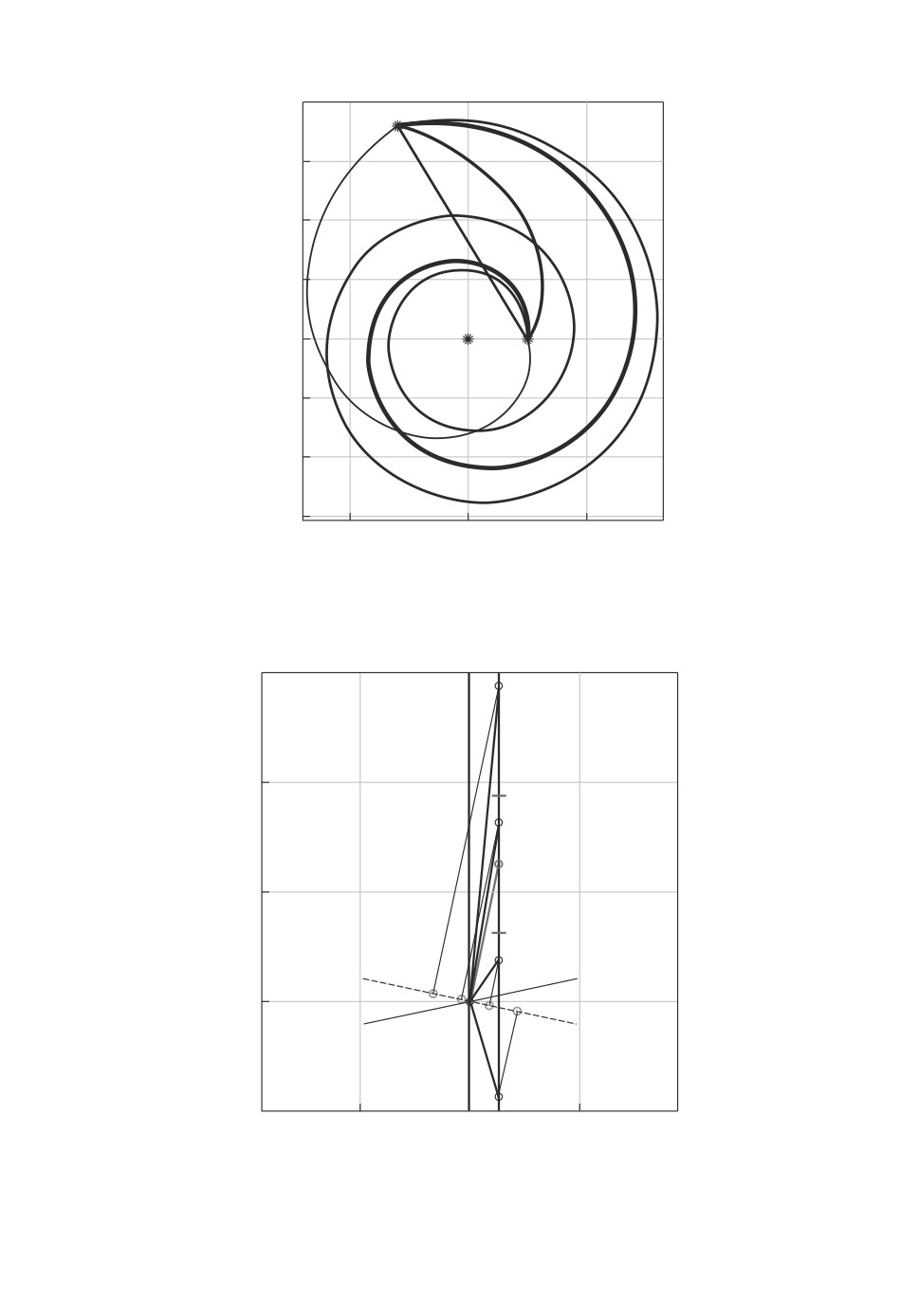
пример. Пусть сенсор S расположен на декартовой плоскости в точке (0, 0),
а УПО требуется осуществить переход из точки A(50,0) в точку B(-60,180),
как показано на рис. 6. Заданное время движения по траектории T = 4. Зна-
чение угла ν в профиле равно 12◦.
На плоскости (x, y) заданы расстояния от сенсора до начальной точки
rA = 50 и до конечной точки rB = 189,737, на плоскости (ρ,ϕ) эти расстояния
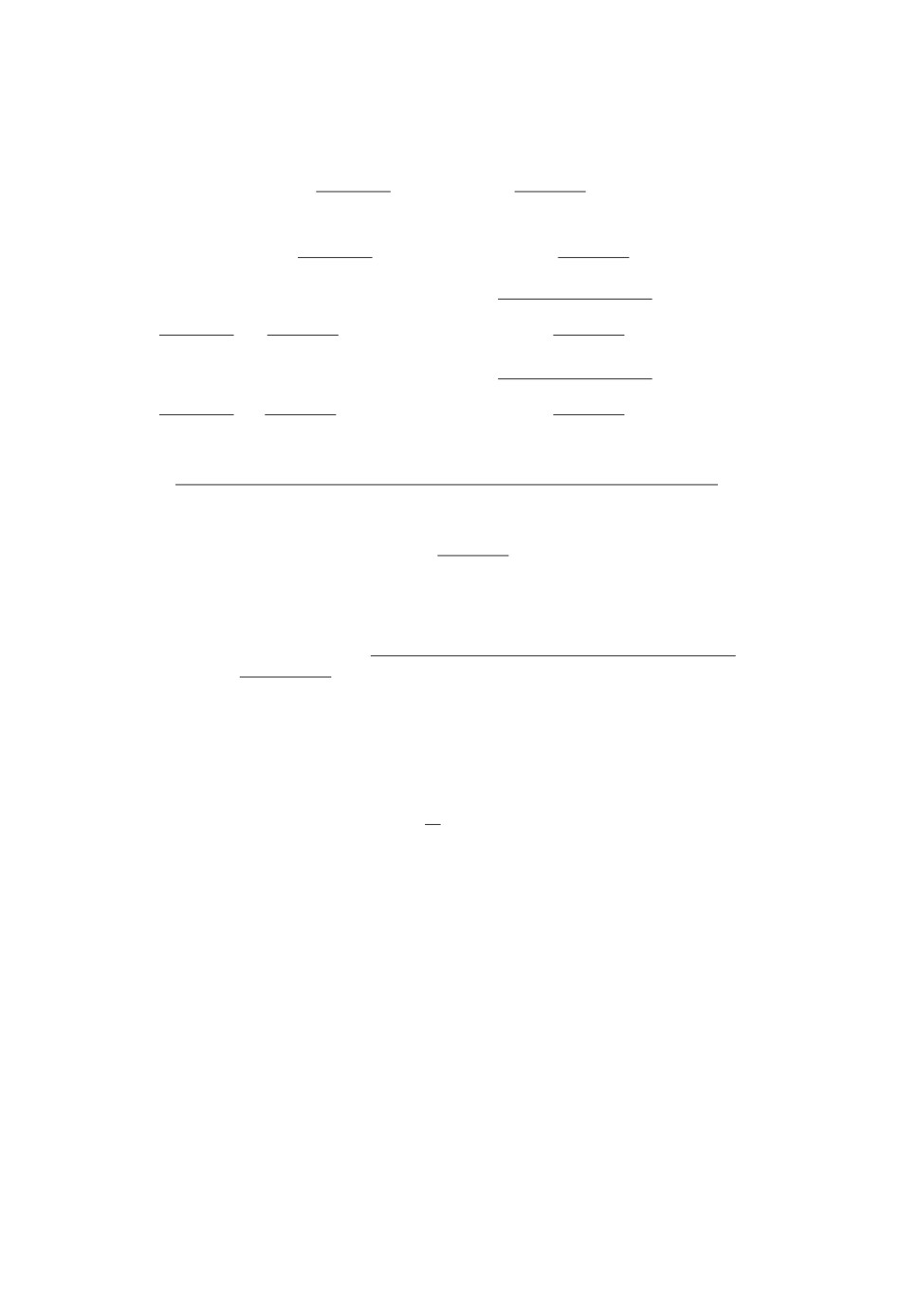
равны ρA = 3,912, ρB = 5,2456. Точки A, B на плоскости (x, y) отображаются
в точки (0, 0) и (ρ(T ) - ρ(0), ϕ(T ) - ϕ(0)) на плоскости (ρ - ρ(0), ϕ - ϕ(0)),
как показано на рис. 7. Точка A отображается единственным образом, а точ-
ка B может отображаться во множество точек, расположенных на верти-
кали с координатой ρ(T ) - ρ(0) с расстоянием между точками по оси ϕ,
равным 2πk, и с расстоянием между соседними точками по оси ϕ, рав-
ным 2π. На рис. 7 представлены четыре возможные точки, пронумерован-
ные цифрами 1, 2, 3, 4. Значения угла ϕ для этих точек соответственно равны
(-4,3906; 1,8925; 8,1757; 14,4589) радиан.
Проекции векторов с началом в начале координат и концами в точках 1-4
на вектор (cos ν, - sin ν), обозначенный штриховой линией, представлены на
рис. 7 и равны соответственно 2,217, 0,911, 0,3954 и 1,7017. Проекция век-
тора с концом в точке 3 минимальна, далее по возрастанию идут проекции
векторов с концами в точках 2, 4 и 1. Здесь представлена еще одна точ-
ка ϕ0, для которой значение произведения C · T = 0, поскольку она располо-
жена на перпендикуляре к оси (cos ν, - sin ν), проведенном через точку (0, 0).
Для любой точки с координатами (ρ(T ) - ρ(0), ϕ), находящейся вне интерва-
ла (ϕ0 - π, ϕ0 + π), найдется точка, находящаяся внутри интервала, которая
в декартовой системе координат определяет конечную точку и имеет меньшее
значение функционала. Назовем этот интервал “рабочей областью”. Макси-
мальное значение произведения в рабочей области равно C · T = |π · sin ν|.
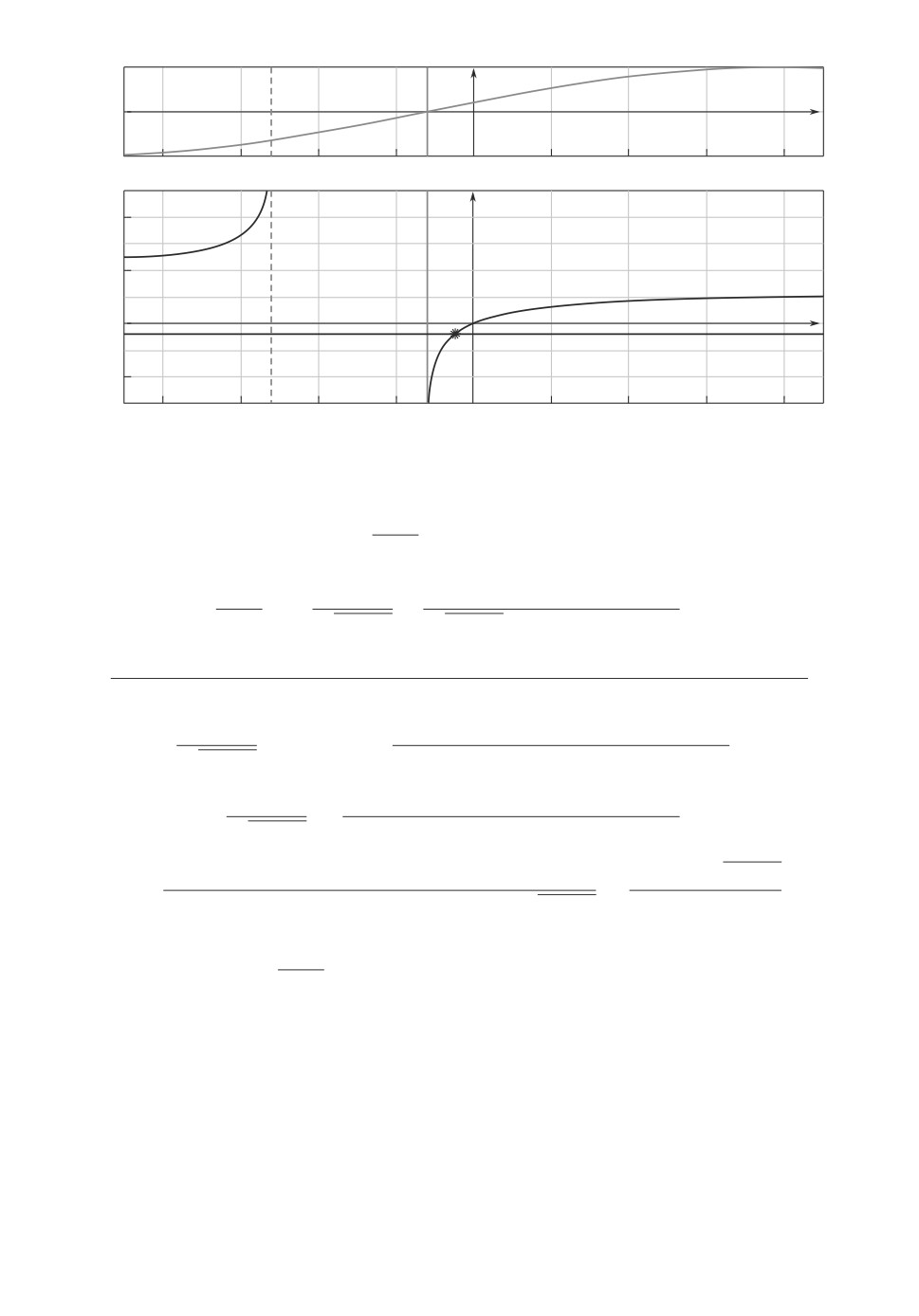
Траектории в виде логарифмических спиралей для всех вышеприведенных
случаев представлены на рис. 6. Толщина линии соответствует величине про-
екции. Минимальная толщина соответствует траектории с наибольшей про-
екцией, а значит, с наибольшим значением функционала, максимальная тол-
щина траектории с наименьшей проекцией (наименьшим значением функ-
ционала). Минимальный риск достигается на переходе из начальной точки
в точку с номером 3, которая находится в “рабочей области”. Те же четы-
ре траектории для переходов представлены и на рис. 7. Поэтому для реше-
ния задачи сначала нужно выбрать значение угла ϕ(T ) и логарифмическую
спираль, в окрестности которой будем строить искомую траекторию. Значе-
ние ϕB должно лежать внутри “рабочей области”. Теперь будем считать, что
значение ϕB выбрано, и переходим к решению задачи.
12
Y
200
B
150
2
1
100
3
50
0
S
A
-50
-100
4
-150
-100
0
100
X
Рис. 6. Положения сенсора S, начальной точки A и конечной точки B.
j(t) - j(0)
15
4
10
j0 + p
3
j0
5
j0 - p
2
0
1
-5
-5
0
5
r(t) - r(0)
Рис. 7. Возможные положения объекта 1, 2, 3, 4.
13
5.1. Частные случаи rB = rA и C = 0
Начнем решение задачи с рассмотрения частного случая, когда r(T ) =
= r(0) = rA = rB. Тогда частным случаем движения по логарифмической
спирали является движение по окружности с постоянной скоростью, что и
является решением задачи, рассмотренной в [12],
r(t) = const,
(5.2)
ϕB - ϕA
ϕ(t) = ϕA +
· t.
T
Другим частным случаем является ситуация, когда rB = rA, а в выраже-
ρB - ρA
нии (3.5) C = 0. Угол ν в этом случае равен ν0 = arctg
. Тогда в систе-
ϕB - ϕA
ме координат (ρ - ρ(0), ϕ - ϕ(0)) траектория является прямой, проходящей
через начало координат, и соответственно в декартовой системе (x, y) лога-
рифмической спиралью. Поскольку значение индикатрисы излучения равно
нулю, двигаться можно с любой скоростью и в том числе с постоянной. Мо-
дуль скорости в таком случае определяется длиной логарифмической спирали
и временем движения. Значение функционала равно нулю. Решение уравне-
ния r = ± sin(ν0) · V0 определяет радиальную компоненту траектории
(5.3)
r(t) = ± sin(ν0) · V0 · t + rA,
rB -rA
где значение скорости V0 =
Из уравнения (3.5) получим угловую
.
T · sin(ν0)
компоненту
(
)
t
(5.4)
ϕ(t) = ctg(ν0) · ln
· (exp (tg ν0 · (ϕB - ϕA) - 1) + 1
+ϕA.
T
Выражения (5.3) и (5.4) определяют траекторию.
5.2. Общий случай
Перейдем к исследованию общего случая. Будем считать, что C = 0. Так-
же предполагаем, что sin ν = 0 и cos ν = 0. Эти случаи рассмотрим далее.
Справедлива лемма 1.
(C·r)иτ=C·cosν·t
Лемма 1. Система (5.1) заменами w = arcsin
V0
сводится к дифференциальному уравнению
dw
(5.5)
= σ · tgw ± tgν.
dτ
Доказательство.
Из первого уравнения системы (5.1) выразим ϕ˙:
r · cosν - σ · C · r
ϕ=
r · sinν
14
Подставим ϕ˙ во второе уравнение. Решение квадратного уравнения относи-
тельно r имеет вид
√
(5.6)
r = σ · C · r · cosν ± sinν · V 20 - (C · r)2.
Разделим обе части уравнения (5.6) для r на V0 и получим уравнение
√
r
σ·C·r
(5.7)
=
· cos ν ± sin ν ·
1-
(C·r)2.
V0
V0
V0
C·r
Далее совершим замену u =
и подставим в (5.7)
V0
√
u
(5.8)
= σ · u · cosν ± sinν ·
1-u2.
C
Разделив обе части уравнения на cos ν, получим
√
u
(5.9)
= σ · u ± tgν ·
1-u2.
C · cosν
Сделаем замену времени τ = C · cos ν · t:
√
du
(5.10)
= σ · u ± tgν ·
1-u2.
dτ
Заметим, что область определения уравнения |u| ≤ 1 и, совершив заключи-
тельную замену w = arcsin u, получим утверждение леммы 1, уравнение (5.5).
Лемма 1 доказана.
Лемма 2. Уравнение (5.5) может быть проинтегрировано в неявном
виде
2·τ
(
)
(5.11)
c1 +
∓ 2 · σ · tgν · w - ln
((tg w ± σ · tg ν) · cos w)2
= 0.
cos2 ν
Здесь c1
постоянная интегрирования.
Справедливость леммы 2 проверяется непосредственным дифференцирова-
нием выражения (5.11).
Сделаем обратную замену времени τ = C · cos ν · t и перепишем решение
(5.11) в виде
2·σ·t
(
)
(5.12)
c1 +
∓ 2 · σ · tgν · w - ln
((tg w ± σ · tg ν) · cos w)2
= 0.
cos ν
Значение константы c1 находится из начальных условий при t = 0, а именно:
(
)
(5.13)
c1 = ±2 · σ · tg ν · w(0) + ln
((tg w(0) ± σ · tg ν) · cos w(0))2
,
15
(C · r(0)). Подставив (5.13) в (5.12) и преобразовав выра-
где w(0) = arcsin
V0
жение, получим решение относительно функции w(t) в неявном виде
)
( sin(ν ± σ · w(t))
(5.14)
±sin ν · (w(t) - w(0)) + σ · cos ν · ln
= C · t.
sin(ν ± σ · w(0))
Далее, умножив обе части уравнения на σ, получим
)
( sin(ν ± σ · w(t))
(5.15)
±σ · (w(t) - w(0)) · sin ν + cos ν · ln
= σ · C · t.
sin(ν ± σ · w(0))
Уравнения для нахождения скорости движения V0 получаются при значении
времени, равном времени движения t = T . Значение V0 должно удовлетво-
рять хотя бы одному из нижеприведенных уравнений:
)
(sin(ν + σ · w(T))
+σ · (w(T) - w(0)) · sin ν + cos ν · ln
=σ·C·T,
sin(ν + σ · w(0))
(5.16)
)
(sin(ν - σ · w(T))
-σ · (w(T) - w(0)) · sin ν + cos ν · ln
=σ·C·T,
sin(ν - σ · w(0))
)
(C·rA
(C·rB)
где w(0) = arcsin
, а w(T) = arcsin
V0
V0
По существу, уравнения (5.16) это две параметрические зависимости
от V0, и для нахождения скоростного режима на всей траектории нуж-
но найти корень хотя бы одной из приведенных функций. Заметим, что
значения w(0) и w(T ) связаны друг с другом. Например, если rB < rA,
)
(
)
(rB
rA
w(T ) = arcsin
· sin w(0)
, иначе w(0) = arcsin
· sin w(T)
rA
rB
Определим rmax = max{rA, rB}, rmin = min{rA, rB } и введем новую пере-
менную
)
(C·rmax
(5.17)
z = σarcsin
V0
Через значения функции z определяются значения w(0) и w(T ). Одно из этих
(
)
rmin
значений равно z, а другое равняется arcsin
· sin z
. Эта функция удоб-
rmax
на тем, что ее значения ограничены диапазоном [-π/2, π/2] и оба уравнения
для нахождения V0 c участием w(0), w(T ) записываются единообразно.
Если σ = 1, то первое уравнение (5.16) формально определяет поведение в
диапазоне от z ∈ [ν, π/2 + ν], второе уравнение (5.16) определяет поведение на
интервале от z ∈ [-π/2 + ν, ν]. В общем случае получаемые решения должны
быть приведены к диапазону z ∈ [-π/2, π/2].
Если σ = -1, то, наоборот, уравнения в (5.16) просто меняются местами и
это никак не влияет на процедуру нахождения корня.
16
Лемма 3. Оптимальное значение V0 модуля скорости на траектории
определяется решением уравнения
(5.18)
F (z) = σ · σr
·C·T,
где функция F (z) равна
(
)
sin(ν + z)
(5.19) F (z) = (z - arcsin(kr · sin z)) · sin ν + cos ν · ln
,
sin(ν + arcsin(kr · sin z))
rmin
kr =
, σr = sign(rB - rA).
rmax
Доказательство.
rmin
Определим kr =
, σr = sign(rB - rA). Если rmax = rB, то уравне-
rmax
ние (5.16) будет иметь вид
(
)
sin(ν + z)
(z - arcsin(kr · sin z)) · sin ν + cos ν · ln
=σ·C·T.
sin(ν + arcsin(kr · sin z))
И, наоборот, если rmax = rA, то
)
(sin(ν + arcsin(kr · sin z))
(arcsin(kr · sin z) - z) · sin ν + cos ν · ln
=σ·C·T.
sin(ν + z)
Умножив на (-1) и преобразовав, получим зависимость
(
)
sin(ν + z)
(z - arcsin(kr · sin z)) · sin ν + cos ν · ln
= -σ · C · T.
sin(ν + arcsin(kr · sin z))
Поэтому с использованием константы σr уравнение (5.16) будет иметь вид
(
)
sin(ν + z)
(z - arcsin(kr · sin z)) · sin ν + cos ν · ln
=
sin(ν + arcsin(kr · sin z))
=σ·σr ·C·T.
Теперь, определив функцию F (z) посредством (5.19), получаем утверждение
леммы 3. Лемма 3 доказана.
Найдем область определения функции F (z). Еще раз заметим, что об-
ласть определения находится внутри отрезка z ∈ [-π/2, π/2]. Для существо-
вания значения функции необходимо, чтобы под знаком логарифма функции
sin(ν + z) и sin(ν + arcsin(kr · sin(z))) имели один знак и не равнялись нулю.
По исходным предположениям sin ν = 0, а на интервале [-π/2, π/2] имеет-
ся точка z = ν0 = -ν, в которой sin(ν + ν0) = 0, и точка z = zgr, в которой
sin(ν + arcsin(kr · sin(zgr)) = 0.
17
Лемма 4. 1) Если zgr существует и zgr ≤ ν0, то область определения
функции F (z) задается диапазоном z ∈ [-π/2, zgr) ∪ (ν0, π/2], в противном
случае z ∈ (ν0, π/2].
2) Если zgr существует и zgr ≥ ν0, то область определения функции F (z)
задается диапазоном z ∈ [-π/2, ν0) ∪ (zgr, π/2], в противном случае z ∈
∈ [-π/2, ν0).
Доказательство.
Условия существования значения функции F (z) записываются в виде
arcsin(kr · sin z) < ν0 и z < ν0, либо arcsin(kr · sin z) > ν0 и z > ν0. Если точ-
sin ν0
ка zgr находится слева от ν0, то при
< -1 в этой области функция
kr
не определена, поскольку zgr не существует, и, значит, z ∈ (ν0, π/2]. В про-
(sin ν0 )
тивном случае zgr = arcsin
и область определения z ∈ [-π/2, zgr) ∪
kr
∪ (ν0 - ν, π/2].
Аналогично доказывается и второе утверждение леммы 4. Лемма 4 дока-
зана.
Чтобы получить менее громоздкий вид функции F (z), введем переменную
(5.20)
z = arcsin(kr
· sin(z)).
Находить значение V0 будем в два этапа. Сначала из уравнения (5.19) найдем
значение z, поскольку значение V0 явно не входит в уравнение, а затем по
нему определим значение V0. Функция F (z) в новых обозначениях примет
вид
)
(sin(ν + z)
(5.21)
F (z) = (z - z) · sin ν + cos ν · ln
sin(ν + z)
Лемма 5. Функция F(z) при условии sinν = 0 является монотонной
функцией в каждой односвязной части области определения, задаваемой по
лемме 4, за исключением точек z = ± π/2.
Доказательство.
dF (z)
dz
cos z
Найдем производную
. Заметим, что
=kr ·
. Справедлива
dz
dz
cos z
цепочка равенств:
(
dF (z)
cos z)
sin(ν + z)
= 1-kr ·
· sin ν + cos ν ·
×
dz
cos z
sin(ν + z)
)
( cos(ν + z)
sin(ν + z) · cos(ν + z) · kr · cos z
×
-
=
sin(ν + z)
sin2(ν + z) · cos z
(
)
cos(ν + z)
kr · cos z
cos ν · cos(ν + z)
= sinν + cos ν ·
-
· sin ν +
=
sin(ν + z)
cos z
sin(ν + z)
18
cos z
kr · cos z
=
-
=
sin(ν + z)
sin(ν + z)
cos z
=
· (sin ν · cos z + cos ν · sin z -
sin(ν + z) · sin(ν + z)
- kr · sinν · cosz - kr · cosν · sinz) =
cos z · sin ν
=
· (cos z - kr · cos z).
sin(ν + z) · sin(ν + z)
Поскольку cos z > 0 при z ∈ (-π/2, π/2), sin(ν + z) · sin(ν + z) > 0, так как
sin(ν + z) sin(ν + z) одного знака по условию леммы 4, cos(z) - kr · cos z =
√
√
=
1 - (kr · sinz)2 -
k2r - (kr · sin z)2 > 0 и 0 < kr < 1, знак производной
определяется знаком sin ν. Если sin ν > 0, функция монотонно возрастает в
каждой односвязной части области определения и, наоборот, если sin ν < 0,
функция монотонно убывает в каждой односвязной части области определе-
ния. Лемма 5 доказана.
По лемме 5 легко определить наличие корня внутри области определе-
ния F (z), поскольку на одной из границ области значение функции стремит-
ся к +∞ или -∞. Величина значения функции на другой границе области и
поведение функции F (z) позволяют определить, имеется ли решение, и найти
его.
Теорема 1. Если уравнение (5.18) имеет решение и kr < 1, то это ре-
шение является единственным.
Доказательство.
Покажем, что решение единственно. Когда область определения состоит
из единственного полуинтервала, то по лемме 5 в силу того что функция F (z)
монотонно возрастает или убывает, а правая часть уравнения константа,
решение единственно. Пусть имеется два полуинтервала области определе-
ния. Тогда по лемме 4 kr > sin ν и каждый из полуинтервалов примыка-
ет к одной из границ возможных значений z. Рассмотрим разность значе-
ний функции на границах ΔF = F (π/2) - F (-π/2). Заметим, что значение
ΔF = 0 для kr = 1. Справедлива цепочка равенств:
(
)
sin(ν + π/2)
ΔF = (π/2 - arcsin kr) · sin ν + cos ν · ln
-
sin(ν + arcsin kr)
(
)
sin(ν - π/2)
- (-π/2 + arcsin kr) · sin ν - cos ν · ln
=
sin(ν - arcsin kr)
(5.22)
)
(sin(ν +π/2) · sin(ν -arcsin kr)
= (π - 2 arcsin kr) · sin ν + cos ν · ln
=
sin(ν - π/2) · sin(ν + arcsin kr)
)
(sin(arcsin kr - ν)
= (π - 2 arcsin kr) · sin ν + cos ν · ln
sin(arcsin kr + ν)
19
1
sin(v + z)
z
0
-1
-80
-60
-40
-20
0
20
40
60
80
F(z)
4
2
z
0
-2
-80
-60
zgr
-40
-20
v0
0
20
40
60
80
Рис. 8. Функции sin ν + z и F (z).
dΔF
Теперь найдем производную
:
dkr
dΔF
2sin ν
cos ν · sin(arcsin kr + ν)
=-√
+
√
×
dkr
1-k2r
1 - k2r · sin(arcsinkr - ν)
cos(arcsin kr - ν) · sin(arcsin kr + ν) - cos(arcsin kr - ν) · sin(arcsin kr + ν)
×
=
sin2(arcsin kr + ν)
(
)
1
cos ν · sin(2 · ν)
=
√
·
-2sin ν +
=
1-k2r
sin(arcsin kr - ν) · sin(arcsin kr + ν)
)
sin ν
( cos(2 arcsin kr) - cos(2ν) + 2 cos2 ν
=
√
·
=
1-k2r
sin(arcsin kr - ν) · sin(arcsin kr + ν)
√
sin ν · (1 + cos(2 arcsin kr)
2sin ν ·
1-k2r
=
√
=
sin(arcsin kr - ν) · sin(arcsin kr + ν) ·
1-k2r
k2r - sin2 ν
dΔF
Знак производной
совпадает со знаком sin ν, поскольку по лемме 4
dkr
kr > sin ν. Если ν > 0, то минимальное для левой области значение функ-
ции F (z) соответствует z1 = -π/2. Значение этой функции максимально для
правой области при z2 = π/2, а ΔF максимальна при kr = 1 и равна нулю.
Это значит, что значения функции в левой области больше значений функции
в правой области. Аналогичная ситуация при ν < 0, когда значения функции
в левой области меньше значений в правой области. А значит, если решение
существует, то оно единственно. Теорема доказана.
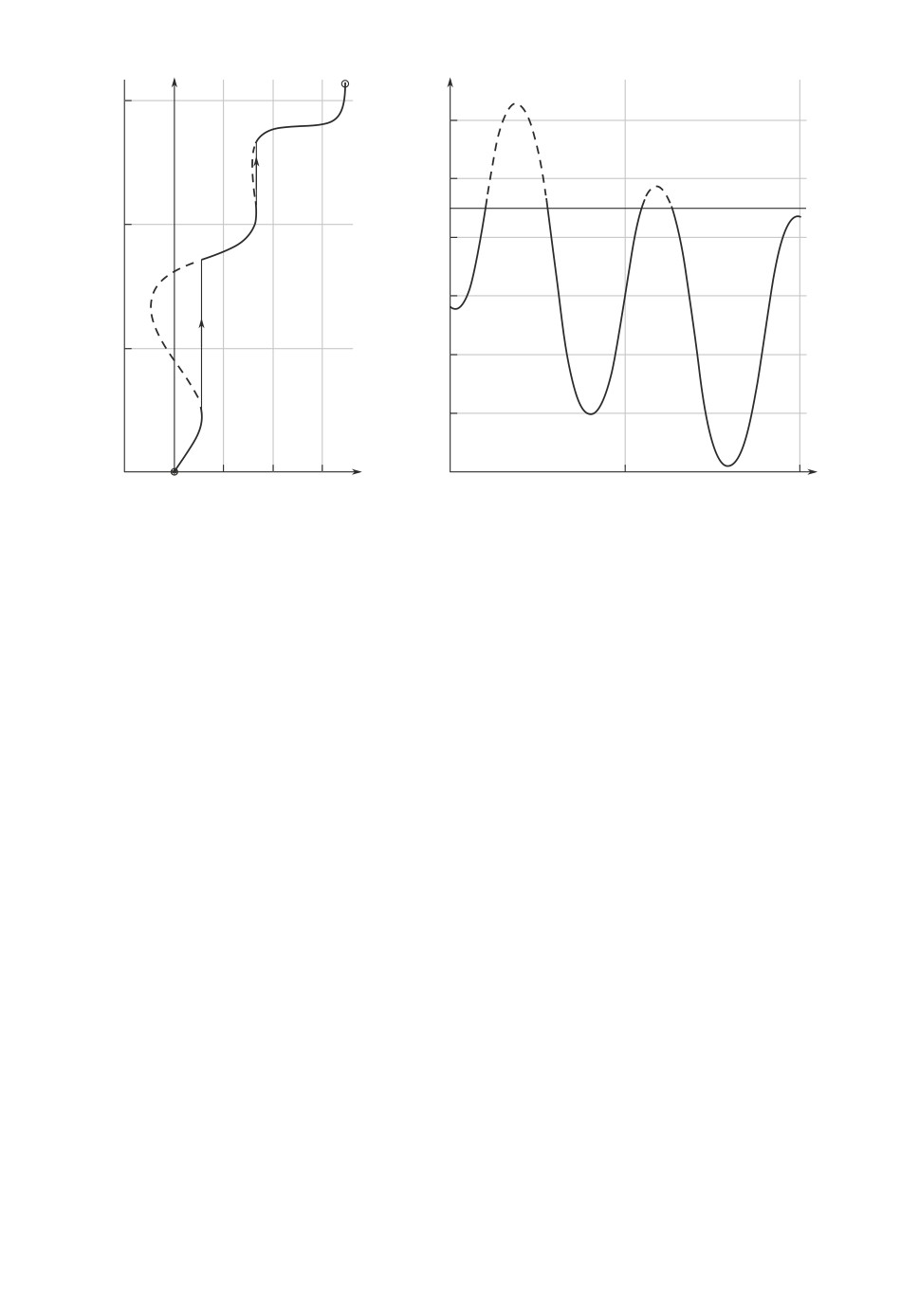
Для примера рассмотрим переход, представленный на рис. 6 по траектории 3.
На верхней части рис. 8 представлено поведение функции sin(ν + z).
20
Y
V
150
350
100
300
50
250
0
200
-50
150
-100
-100
0
100
200
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
X
t
Рис. 9. Экстремальные траектории (слева) и скоростной режим на них (справа).
Y
V
150
100
80
100
60
50
40
0
-100
-50
0
50
100
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
X
t
Рис. 10. Экстремальные траектории (слева) и скоростной режим на них (справа).
Точка пересечения этой функцией с нулем определяет положение значения
угла νo. Вертикальным отрезком отмечено положение значения ν0 = -12◦.
График F (z) расположен в нижней части рисунка. Значение zgr отмече-
но вертикальной штриховой линией. Область определения F (z) состоит из
двух полуинтервалов [-π/2, zgr ) и (ν0, π/2]. Для рассматриваемого примера
)
rA
50
(sin ν0
(sin(-12◦))=
kr =
=
= 0,2635, а zgr = arcsin
= arcsin
rB
189,737
kr
kr
= -52,089◦. Эта точка отмечена вертикальной штриховой линией. На нижней
части рисунка горизонтальной линией отмеченo значение правой части урав-
нения (5.18), равное 0,3954, через которое при T = 4 определяется константа
C = 0,09885. Тогда решением уравнения (5.18) являются точка пересечения
соответствующих графиков функций и значение переменной z = -4,755◦. Оп-
тимально значение скорости находится по найденным значениям перемен-
C·rmax
ных V0 =
226,25.
=
sin z
На рис. 9 черным цветом представлены траектория движения и график
скорости. Для сравнения штриховой линией представлены траектория в виде
логарифмической спирали и оптимальный скоростной режим на этой траек-
тории. Значение функционала R = 0,039 и совпадает со значением функцио-
нала на логарифмической спирали.
Для сравнения на рис. 10 приведем траектории и скорости для случая пе-
рехода в точку 2 на плоскости (ρ, ϕ). Значение функционала R = 0,2075, что
21
значительно больше минимального его значения, но совпадает со значением
функционала на логарифмической спирали 2.
Осталось рассмотреть несколько частных случаев значений ν. Приступим
к их исследованию.
5.3. Частный случай: sin ν = 0
Рассмотрим случай sin ν = 0. Тогда справедливо равенство cos ν = ±1 и
система уравнений (5.1) принимает вид
{
r = ±σ · C · r,
(5.23)
r2 + (ϕ˙ · r)2 = V20.
Лемма 6. Решение системы уравнений (5.23) имеет вид
(5.24)
r(t) = rA
· exp (±σ · C · t) ,
(5.25)
ϕ(t) - ϕA
= ±(ctgw(t) + w(t) - ctgw(0) - w(0)),
)
(C · r(t)
где w(t) = arcsin
V0
Доказательство.
Интегрируя первое уравнение (5.23), получим зависимость (5.24). Обозна-
чи
C =±C·σ, тогда r(t)=rA ·exp
C·t). Подставля
C во второе уравне-
ние системы (5.23), получим
C2 · r2 +ϕ˙2 · r2 = V20.
Поскольк
C2 = C2, то выпишем дифференциальное уравнение относитель-
но ϕ˙(t) в виде
√
√
V2
V20
0
ϕ=±
-C2 =±
· exp(-2
C · t) - C2.
r2(t)
r2
A
Сделаем замену τ = exp
C · t) и получим
√(
)2
1
V0
dϕ = ±
·
- τ2 · dτ.
τ2
rA · C
После интегрирования последнего уравнения зависимость ϕ(τ) с некоторой
константой интегрирования C2 принимает вид
√(
)
2
V0
(τ· rA ·C)
ϕ(τ) = ±-1
·
- τ2 - arcsin
+C2.
τ
rA · C
V0
22
Обратная замена времени дает зависимость ϕ(t):
√(
)
2
V0
(r(t) · C)
ϕ(t) = ±-
- 1 - arcsin
+C2.
r(t) · C
V0
Значение C2 находится из начальных условий:
√(
)
2
V0
(rA ·C)
C2 = ϕA ∓-
- 1 - arcsin
.
rA · C
V0
)
(C · r(t)
Если перейти к переменным w(t) = arcsin
, то получим зависи-
V0
мость ϕ(t) в виде (5.25). Лемма 6 доказана.
По лемме
6
при подстановке граничного условия в соотношения
(5.24)-(5.25) получаем уравнение для нахождения V0, которое имеет вид
(5.26)
|ϕB - ϕA
| = |ctg(w(T)) + w(T) - ctg(w(0)) - w(0)|.
Функция ctg(w) + w монотонно убывает на интервале (0, π/2) при увеличе-
нии w, поскольку
d(ctg w + w)
-sin2 w - cos2 w
=
+ 1 = -ctg2 w,
dw
sin2 w
поэтому если w(T ) > w(0), то значение правой части уравнения (5.26) равно
ctg w(0) + w(0) - ctg w(T ) - w(T ), иначе ctg w(T ) + w(T ) - ctg w(0) - w(0).
Если ввести функции z из (5.17) и z из (5.20), то уравнение (5.26) примет
вид
(5.27)
|ϕB - ϕA
| = ctg z+ z- ctgz - z.
Лемма 7. Решение уравнения (5.27) существует и единственно, если
(5.28)
|ϕB - ϕA| ≥ ctg(arcsin kr) + arcsin kr
− π/2.
Доказательство.
Переменная z, как функция V0, монотонна и принимает значения
z ∈ (0,π/2]. Минимальное значение правой части уравнения (5.27) достига-
ется при значении z = π/2 и соответственно z = arcsin kr и равно
ctg(arcsin kr) + arcsin kr - π/2.
Поэтому решение существует и единственно, если выполнено (5.28). Лемма 7
доказана.
23
V
Y
150
200
180
100
160
50
140
120
0
100
-50
80
60
-100
-50
0
50
100
0
0,5
1,0
1,5
2,0
2,5
3,0
3,5
4,0
X
t
Рис. 11. Экстремальные траектории (слева) и скоростной режим на них (справа).
Рассмотрим пример траектории, изображенной на рис. 6, и обратимся к
рис. 7. Поскольку ν = 0, то проекция на горизонтальную ось для всех точек
одинакова и это означает, что для всех переходов значение функционала оди-
наково. Однако скорости для этих случаев сильно отличаются. Естественно
выбрать траекторию с минимальной скоростью движения. Рассмотрим сна-
чала движение в окрестности траектории 2. Тогда |ϕB - ϕA| = 1,8925 ради-
ан, значение kr = rB/rA = 50/189,737 = 0,2635 и значение выражения (5.28)
ctg(arcsin kr) + arcsin kr - π/2 = 2,3565 > |ϕB - ϕA|. Траектории, по которой
УПО движется с постоянной скоростью и которая соответствует минималь-
ному значению риска на траектории 2, не существует. Но если взять траек-
торию 1, для которой |ϕB - ϕA| = 4,3906 радиан, то движение с постоянной
скоростью возможно.
Решение представлено на рис. 11. Для данного случая V0 = 104,65 и значе-
ние функционала R = 0,44463. Таким образом, в случае sin ν = 0 и rA = rB,
всегда можно подобрать сдвиг, равный 2kπ, так, что значение |ϕB - ϕA| будет
удовлетворять лемме 7.
5.4. Частный случай cos ν = 0
Рассмотрим второй частный случай, когда cos ν = 0. Тогда sin ν = ±1 и
система уравнений (5.1) принимает вид
{
ϕ = ∓σ · C,
(5.29)
r2 + (ϕ˙ · r)2 = V20.
Лемма 8. Решение системы (5.29) имеет вид
(5.30)
ϕ(t) - ϕA
= ∓σ · C · t,
(
)
V0
(C·rA)
(5.31)
r(t) =
sin arcsin
±C·t
C
V0
24
Доказательство.
Интегрируя первое уравнение системы (5.29), получим (5.30). Разрешаем
второе уравнение из (5.29) относительно r
√
2
(C · r(t))
(5.32)
r = ±V0 ·
1-
V0
√
C · r(t)
u
Замена u =
приводит уравнение (5.32) к виду
=±
1 - u2, ин-
V0
C
тегрируя которое получаем, что arcsin u = ±C(· t + C3,)где C3 константа
C · r(t)
интегрирования. Обратная замена дает arcsin
= ±C · t + C3. Зна-
V0
чение C3 находится из начальных условий и равно:
)
(C·rA
C3 = arcsin
V0
Откуда следует (5.31). Лемма 8 доказана.
Подстановка краевых условий в (5.31) дает уравнение для нахождения
скорости
)
)
(C·rB
(C·rA
(5.33)
rcsin
- arcsin
=C·T.
a
V0
V0
В переменных z из (5.17) и z из (5.20) уравнение (5.33) примет вид
(5.34)
z-z=C·T.
Лемма 9. Уравнение (5.34) имеет решение и оно единственно, если для
краевых условий выполнено неравенство
(5.35)
|ϕB - ϕA| ≤ π/2 - arcsin kr.
Доказательство.
Поскольку cos ν = 0, то F (z) = z - z, которая по лемме 5 является моно-
тонной функцией. Минимальное значение левой части уравнения (5.34) рав-
но нулю, а максимальное (π/2 - arcsin kr). Поэтому уравнение (5.34) имеет
решение при значении C · T , которое в свою очередь находится из (5.30) и
равняется |ϕB - ϕA|. Тогда для существования решения должно быть выпол-
нено условие (5.35), которое является единственным из монотонности F (z).
Лемма 9 доказана.
Следствие 2. Если условие (5.35) выполнено, то значение скорости
равно
√
1
ϕB - ϕA
(5.36) V0 =
·
r2A - 2 · rA · rB · cos |ϕB - ϕA| + r2B.
T sin(ϕB - ϕA)
25
Доказательство.
Цепочка преобразований приводит к определению V0 и нахождению такой
траектории:
)
(C·rmax
(C·rmin)
arcsin
= arcsin
+C·T,
V0
V0
(
))
(
)
(C·rmax
(C·rmin)
sin arcsin
= sin arcsin
+C·T
,
V0
V0
√
C·rmax
C·rmin
=
· cos(C · T ) +
1-
(C · rmin)2 · sin(C · T),
V0
V0
V0
√
C·rmax
C·rmin
-
· cos(C · T ) =
1-
(C · rmin)2 · sin(C · T),
V0
V0
V0
C2 · (r2max - 2 · rmin · rmax · cos(C · T) + r2min · cos2(C · T))
=
V2
0
)2
(C·rmin
= sin2(C · T) -
· sin2(C · T).
V0
Из последних выражений получаем, что
√
C
V0 =
·
r2max - 2 · cos(C · T) · rmax · rmin + r2min
sin(C · T )
или можно представить в виде (5.36). Если C = 0, то движение происходит
по радиус-вектору и
1
V0 =
· |rB - rA|.
T
В качестве примера рассмотрим переход, изображенный на рис. 6. Получаем,
что π/2 - arcsin kr = π/2 - arcsin 0,2635 = 1,304 < ϕB - ϕA = 1,8925, поэтому
решения в этом случае нет.
5.5. Область существования решения
Выше было рассмотрено решение задачи о нахождении возможности по-
строения траектории движения на постоянной скорости и о нахождении тако-
го значения скорости. Теперь исследуем множество точек на плоскости, для
которого существует решение этой задачи. Сделаем несколько уточняющих
замечаний.
Замечание 3. Для удобства описания будем рассматривать область су-
ществования решения в системе координат с начальным положением объекта
на оси X. Тогда ϕA = 0.
26
j
B
1,5
1,0
v
0,5
ln(rC/rA)
0
ln(rB/rA)
-0,5
-
v
-1,0
-1,5
С
-1
0
1
Рис. 12. Симметрия решения в плоскости (ρ, ϕ).
Замечание 4. Индикатриса G(β,ν) симметрична, поскольку G(β,ν ±π)=
= G(ν, β). Следовательно, любой параметр ν можно заменить его значением
ν ∈ [0,π].
Замечание 5. Кроме того, когда ν1 = π - ν, задача перехода из началь-
ной точки в конечную точку с краевыми условиями ρ(T ) = ρB, ϕ(T ) = ϕB
с углом ν1 совпадает с задачей перехода в точку с краевыми условиями
ρ(T ) = ρB, ϕ(T ) = -ϕB с углом ν. Значит, для всех значений ν можно ис-
пользовать только значения ν ∈ [0, π/2]. Тогда при ν ∈ [0, π/2] функция F (z)
всегда будет возрастающей, поскольку sin ν > 0.
Кроме того имеется еще одна симметрия.
Замечание 6. Для построения области существования решения доста-
точно построить ее внутри круга r ≤ rA.
Проиллюстрируем замечание 6 примером.
Пусть точка A имеет координаты rA = 50, ϕA = 0◦, rB = 80, ϕB = 100◦,
а ν = 35◦. Рассмотрим на одном графике еще один переход из точки A в
точку C с координатами rC = 31,25, ϕC = -100◦. Точки B и C приведены на
рис. 12 в системе координат (ρ(t) - ρA, ϕ(t) - ϕA). Из рисунка видно, что точ-
ки B и C расположены симметрично, проекции на ось (cos ν, - sin ν) имеют
27
одинаковые абсолютные значения, но разные знаки, т.е. правая часть (5.18)
имеет разные знаки для переходов в эти точки. Поскольку rC < rA, а rB > rA,
rA
то значения kr для этих точек одинаковы, kr =
=
rC , а значит, одинако-
rB
rA
вы и решения. Таким образом, информация обо всей области существования
решения содержится внутри круга радиуса rA.
Существование решения опирается на определение разрешимости уравне-
ния (5.18), где главную роль играют значения F (-π/2) и F (π/2). Справед-
лива лемма 10.
Лемма 10. В круге r < rA множество точек (rB,ϕB) или (kr,ϕB), где
kr = rB/rA, в которых существует решение задачи 2 определяется двумя
системами неравенств:
ln kr · ctg ν - π ≤ ϕB,
(
)
(5.37)
π
cos ν
- arcsin kr + ctg ν · ln
≥ -lnkr · ctgν + ϕB;
2
sin(ν + arcsin kr)
ϕB ≤ ln kr · ctg ν + π,
kr > sin ν,
(5.38)
(
)
π
- cos ν
-
+ arcsin kr + ctg ν · ln
≤ -lnkr · ctgν + ϕB.
2
sin(ν - arcsin kr)
Доказательство.
Как упоминалось ранее, задачу о поиске границы области существования
можно свести к задаче, для которой ν > 0 и ν < 90◦ (sin ν > 0) и rB < rA. На
основании лемм 3, 4 и выбранного интервала значений ν перепишем условия
нахождения решения:
(5.39)
F (π/2) ≥ -σ · C · T,
(5.40)
F (-π/2) ≤ -σ · C · T , если kr
> sinν.
Для выбранного диапазона значений из уравнения (3.5), считая ϕA = 0, по-
лучим, что
σ · C · T = lnkr · cosν - ϕB · sinν.
Этот диапазон углов находится в рабочей области, что дает первые нера-
венства из (5.37), (5.38). Разделив уравнения (5.39), (5.40) на sin ν, получим
второе неравенство (5.37) и третье неравенство (5.38), каждое из которых
связано со своей областью значений, задаваемой первыми неравенствами в
этих системах. Лемма 10 доказана.
Полярный угол ϕ0, при котором значение C · T = 0, определяется как
(5.41)
ϕ0 = ln kr
· ctg ν.
Значения границ области должны попадать в рабочий диапазон (ϕ0 - π,
ϕ0 + π), как показано на рис. 13. Эти уравнения определяют для заданных
28
Y
j
1,0
200
j0 + p
j2
j2
j1
0,5
0
j0 ± p
-200
j1
0
j0 - p
-400
-0,5
kr > sin v
-600
-1,0
0
0,5
1,0
-1,0
-0,5
0
0,5
1,0
kr
X
Рис. 13. Границы области существования решения в нормированных на на-
чальную дистанцию полярных (слева) и декартовых (справа) координатах.
значений ν и kr границы области существования решения:
(
)
cos ν
ϕ1 = π/2 - arcsin kr + ctg ν · ln
+ ϕ0(kr,ν),
sin(ν + arcsin kr)
(
)
- cos ν
ϕ2 = -π/2 + arcsin kr + ctg ν · ln
+ ϕ0(kr,ν).
sin(ν - arcsin kr)
Эти кривые попарно пересекаются с кривыми ϕ0 ± π = 0. Одна точка пересе-
чения ϕg1 определяется совместным решением уравнения ϕ1 = ϕ0 - π, другая
точка ϕg2 находится из совместного решения ϕ2 = ϕ0 + π.
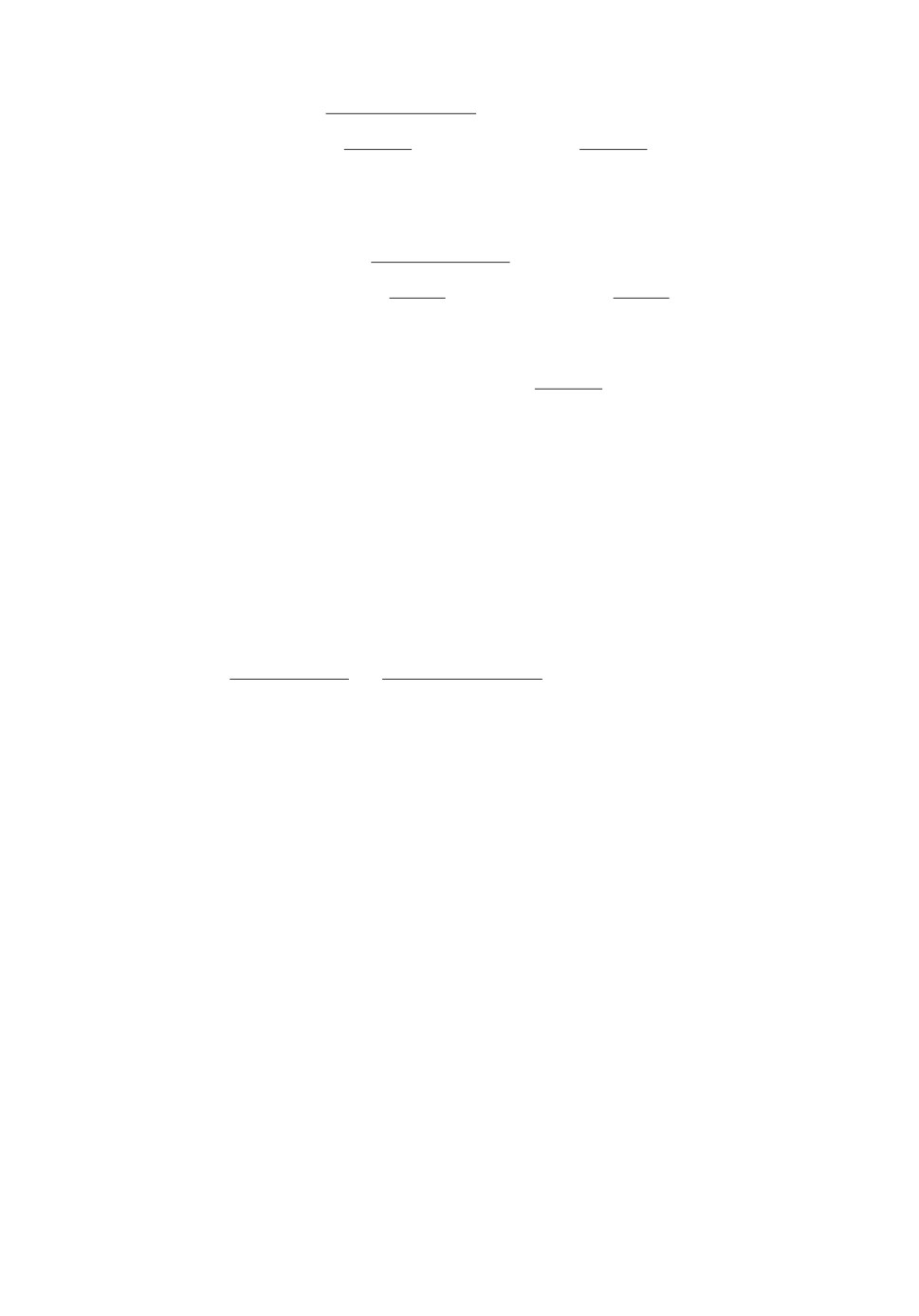
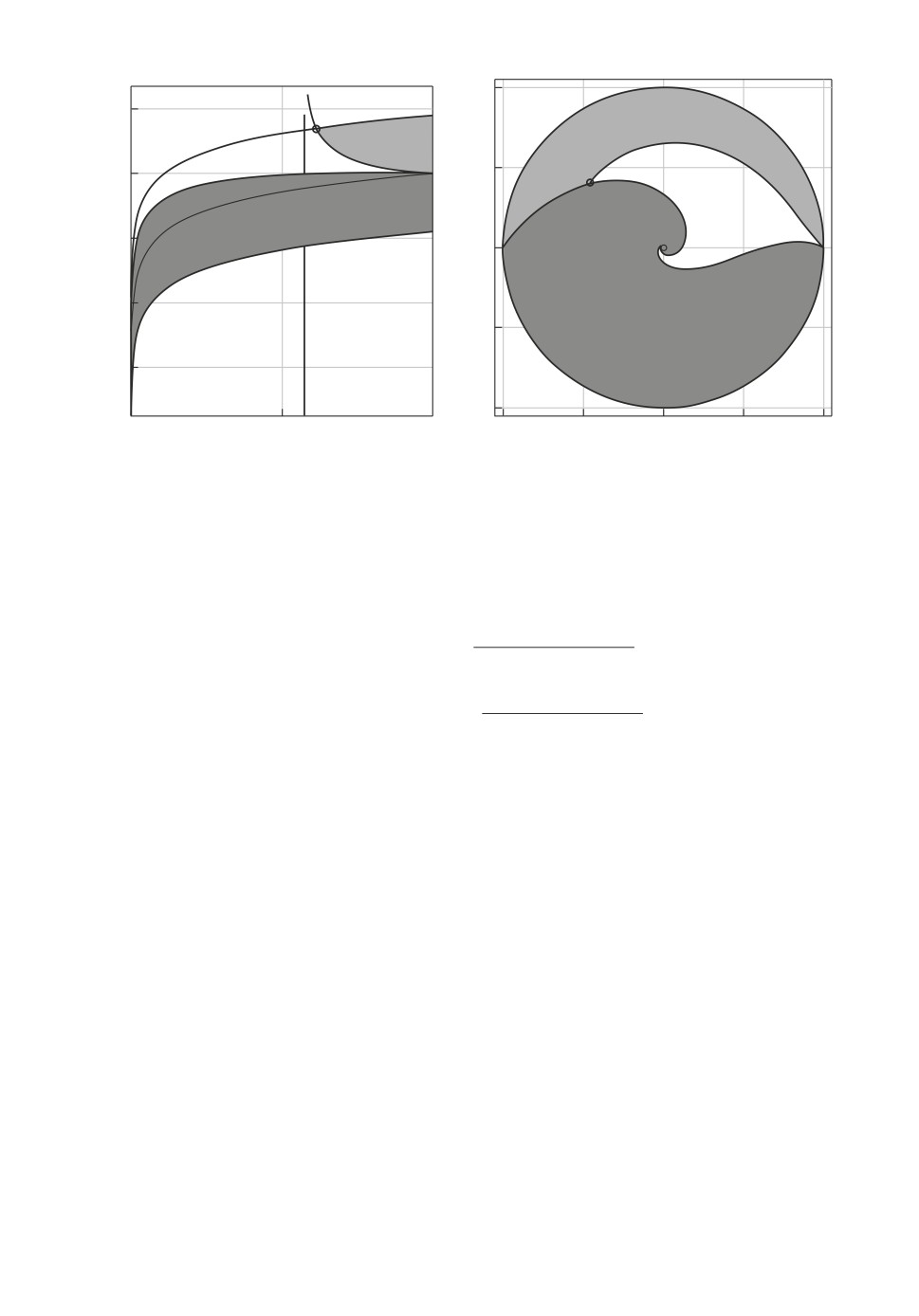
Пример расчета области существования решения для максимальной ди-
станции от сенсора, равного 300 единиц, рассматривается на рис. 14,a. На-
помним, что сенсор расположен в точке с координатами (0, 0), начальная
точка A = (50, 0). Серым цветом обозначена область существования решения,
а черные линии соответствуют частным случаям rA = rB и C = 0.
На рис. 14,б приведена область существования решения для внутрен-
ней части области rB < rA при условии, что координаты нормированы. Ди-
станция определяется в относительных единицах kr = rB/rA. Начальная
точка A имеет координаты (1, 0). Форма области на рис. 14,б естественно
совпадает с формой области внутри круга радиуса rA для рис. 14,a. По-
ясним на примере, как по области рис. 14,б определяется существование
точки для дистанции большей rA. Например, возьмем точку D1, располо-
женную на дистанции 210 и углом направления (-60◦) (точка D1 указа-
на на рис. 14,a). Для нее отношение kr = 50/210 = 0,2381. Данные о воз-
можности решения для этой точки можно получить, отложив дистанцию,
29
а
б
Y
Y
300
1,0
200
0,5
100
D2
0
0
A
A
-100
D
1
-0,5
-200
-300
-1,0
-200
0
200
X
-1,0
-0,5
0
0,5
1,0
X
Рис. 14. Область существования решения для ν =
35◦: a
rB
∈ [0; 300]; б
rB < rA.
а
б
Y
Y
300
1,0
200
0,5
100
0
0
A
A
-100
-0,5
-200
-300
-1,0
-200
0
200
X
-1,0
-0,5
0
0,5
1,0
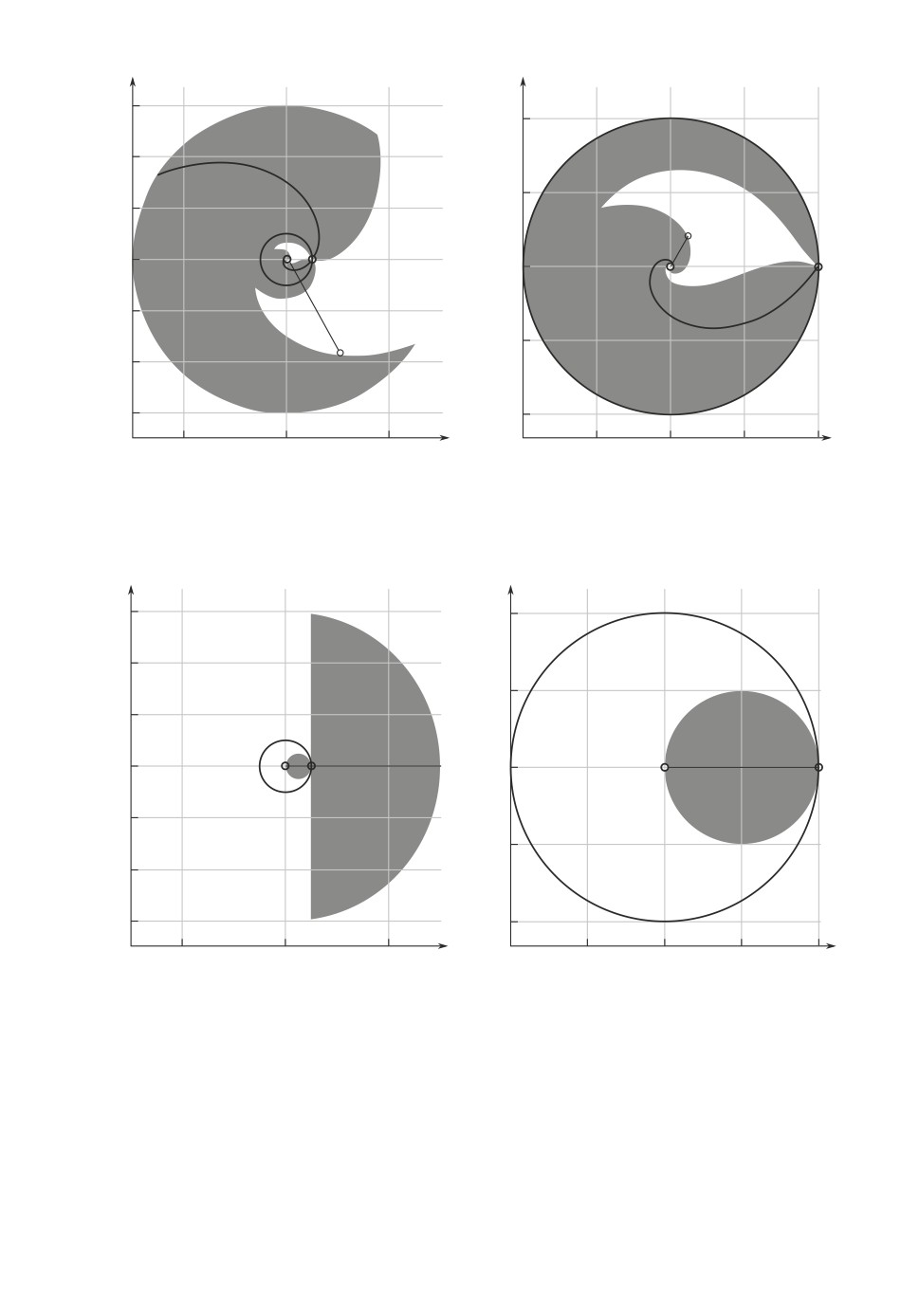
Рис. 15. Область существования решения для ν = 90◦: a rB ∈ [0; 300]; б
rB < rA.
равную kr, под углом 60◦ (точка D2 указана на рис. 14,б ). И, наконец,
рассмотрим частный случай cos ν = 0. Поскольку условием достижимости
является выполнение уравнения (5.35), то граница области легко вычис-
ляется. Для случая rB ≥ rA значение kr = rA/rB, граничная координата
x = rB · cos(π/2 - arcsinkr) = rB · kr = rA. Вся полуплоскость отображается
в область круга с центром и радиусом rA/2. Эта область представлена на
рис. 15.
30
6. Заключение
Две рассмотренные в статье задачи планирования траекторий автономных
и пилотируемых УПО указали на общие черты, характерные этому классу
задач. Оказывается, что оптимизационные критерии, естественным образом
введенные в формализации задач планирования траектории, позволяют по-
лучать решение не для всех краевых условий. Для задачи движения по за-
данной траектории были предложены условия существования оптимального
скоростного режима и разработан алгоритм его нахождения. Для задачи на-
хождения оптимальной траектории движения с постоянной скоростью были
найдены области существования решения со значением функционала риска,
равным минимальному значению на траектории, соответствующей логариф-
мической спирали с оптимальным законом изменения скорости на ней, а так-
же предложен метод построения этой области и найден аналитический вид
оптимальной траектории.
Дальнейшая работа может быть направлена на решение задачи планиро-
вания траектории для случая нескольких скоростных режимов УПО с инди-
катрисой излучения, при которой вырождаются необходимые условия опти-
мальности функционала риска.
СПИСОК ЛИТЕРАТУРЫ
1.
Miller A.B., Miller B.M. On AUV Navigation Based on Acoustic Sensing of the
Seabed Profile // J. Communications Technology and Electronics. 2018. V. 63.
2.
Попов А.К., Миллер А.Б., Степанян К.В., Миллер Б.М. Моделирование процес-
са навигации беспилотного летательного аппарата с использованием двух бор-
товых камер, смещенных по высоте // Сенсорные системы. 2018. № 1. С. 19-25.
3.
Zhi-Wen W., Kun L.M., Li-jing W. Path Planning for UUV in Dynamic Environ-
ment // 9th Int. Sympos. on Computational Intelligence and Design (ISCID). 2016.
4.
Shaikin M.E. On statistical risk functional in a control problem for an object moving
in a conflict environment // J. Comput. Syst. Sci. Int. 2011. V. 50. No. 1. P. 20-29.
5.
Добровидов А.В., Кулида Е.Л., Рудько И.М. Оптимизация траектории движе-
ния объекта по вероятностному критерию в режиме пассивной гидролокации в
анизотропной среде // Пробл. управл. 2014. № 4. С. 31-37.
6.
Sysoev L.P. Detection probability criterion on the path for mobile object control
problem in conflict environment // Autom. Remote Control. 2011. V. 72. No. 8.
Сысоев Л.П. Критерий вероятности обнаружения на траектории в задаче управ-
ления движением объекта в конфликтной среде // Пробл. управл. 2010. № 6.
С. 64-70.
7.
Galyaev A.A., Lysenko P.V., Yakhno V.P. 2D Optimal Trajectory Planning Problem
in Threat Environment for UUV with Non-Uniform Radiation Pattern // Sensors.
31
8.
Barrios S., Lopez-Franco M., Rios J.D., Arana-Daniel N., Lopez-Franco C., Ala-
nis A.Y. An Autonomous Path Controller in a System on Chip for Shrimp Robot //
9.
Cui J., Wei R., Liu Z., Zhou K. UAV Motion Strategies in Uncertain Dynamic
Environments: A Path Planning Method Based on Q-Learning Strategy // Applied
10.
Инзарцев А.В., Киселев Л.В., Костенко В.В., Матвиенко Ю.В., Павин А.М.,
Щербатюк А.Ф. Подводные робототехнические комплексы: системы, техноло-
гии, применение. М.: Институт проблем морских технологий Дальневосточного
отделения РАН.
11.
Киселев Л.В., Инзарцев А.В., Костенко В.В., Павин А.М. Модели, системы и
технологии подводных роботов и их применение для решения поисково-обсле-
довательских задач 2020. М.: ВСПУ, 2019.
12.
Галяев А.А., Маслов Е.П., Рубинович Е.Я. Об одной задаче управления движе-
нием объекта в конфликтной среде // Изв. РАН. Теория и системы управления.
2009. № 4. С. 130-136.
13.
Галяев А.А., Маслов Е.П. Оптимизация закона уклонения подвижного объекта
от обнаружения при наличии ограничений // АиТ. 2012. № 6. С. 83-94.
Galyaev A.A., Maslov E.P. Optimization of the law of moving object evasion from
detection under constraints // Autom. Remote Control. 2012 V. 73. No. 6. P. 992-
14.
Kabamba P.T., Meerkov S.M., Zeitz F.H. Optimal Path Planning for Unmanned
Combat Aerial Vehicles to Defeat Radar Tracking // J. Guidance, Control, and
15.
Galyaev A.A., Lysenko P.V., Yakhno V.P. Algorithm for Optimal Two-Link Tra-
jectory Planning in Evasion from Detection Problem of Mobile Vehicle with Non-
Uniform Radiation Pattern // Advances in Syst. Sci. Appl. 2021. V. 2. P. 7182.
16.
Pachter L., Pachter M. Optimal paths for avoiding a radiating source // Proc. 40th
IEEE Conf. on Decision and Control (Cat. No.01CH37228). Orlando, FL, USA:
17.
Zabarankin M., Uryasev S., Pardalos P. Optimal Risk Path Algorithms // Cooper-
ative Control and Optimization. V. 66 Boston, MA: Springer US, 2002. P. 273-298.
18.
Zabarankin M., Uryasev S., Murphey R. Aircraft Routing Under the Risk of Detec-
tion // Naval Research Logistics. 2006. V. 53. No. 8. P. 728-747.
19.
Галяев А.А., Маслов Е.П., Яхно В.П., Абрамянц Т.Г. Уклонение подвижного
объекта от обнаружения в конфликтной среде // Управление большими систе-
Статья представлена к публикации членом редколлегии М.В. Хлебниковым.
Поступила в редакцию 07.02.2022
После доработки 17.03.2022
Принята к публикации 31.03.2022
32