Автоматика и телемеханика, № 8, 2022
Стохастические системы
© 2022 г. А.С. АРХИПОВ (ege3145@yandex.ru),
К.В. СЕМЕНИХИН, д-р физ.-мат. наук (siemenkv@rambler.ru)
(Московский авиационный институт)
МНОГОМЕРНАЯ ЧЕБЫШЕВСКАЯ ГРАНИЦА
ТИПА СЕЛБЕРГА
Определена точная верхняя грань вероятности того, что случайный
вектор с заданными математическим ожиданием и ковариационной мат-
рицей окажется вне шара. Данная вероятностная граница определяется
через решение скалярного уравнения, а в случае единичной ковариацион-
ной матрицы дается аналитическим выражением, которое представляет
собой многомерное обобщение границы из неравенства Селберга. Пока-
зано, что при малых значениях вероятности более типична ситуация, ко-
гда искомая граница определяется новым выражением в сравнении с из-
вестной верхней оценкой из неравенства Маркова. Полученный результат
применен к решению задачи о проверке гипотез с использованием общей
альтернативы.
Ключевые слова: многомерная чебышевская граница, проблема момен-
тов, неравенство Селберга, проверка гипотез.
DOI: 10.31857/S0005231022080037, EDN: AGMYRT
1. Введение
Об актуальности робастных оптимизационных моделей, учитывающих
неопределенность в задании распределений случайных параметров и возму-
щений, можно судить по недавнему обзору [1]. В нем описаны теоретические
основы и приложения оптимизационных постановок, в которых гарантиро-
ванное значение целевой функции риска (потерь, ошибки и т.п.) определя-
ется в результате максимизации по множеству распределений из некоторо-
го класса. Весомую часть этих постановок составляют различные варианты
проблемы моментов Маркова задачи о нахождении супремума вероятност-
ного функционала при ограничениях на моментные характеристики вектора,
включающего все случайные параметры модели [2, 3].
Для указанных задач, рассматриваемых в многомерной формулировке,
наиболее естественным выглядит задание класса распределений с известны-
ми (или частично известными) вектором математического ожидания и ко-
вариационной матрицей [4]. К таким постановкам можно отнести задачи ро-
бастной оптимизации инвестиций с критериями в виде квантили [5] и матема-
тического ожидания [6], задачи минимаксного оценивания с вероятностными
38
критериями [7, 8], робастные версии задач стохастического программирова-
ния [9], в том числе с вероятностными ограничениями [10].
В данной статье рассматривается задача о нахождении верхней границы
для вероятности того, что случайный вектор с фиксированными моментами
второго порядка окажется вне шара. Такая постановка возникает при вычис-
лении наихудшего значения вероятности ошибки в задаче векторного мини-
максного оценивания [7], при построении робастных квадратичных класси-
фикаторов [11], при определении гарантированной надежности доверитель-
ного эллипсоида, построенного на выборочной ковариационной матрице [12].
Алгоритмическое решение указанной задачи (и даже более общей, когда со-
бытие задается системой квадратичных неравенств) получено в [13] путем
сведения к задаче полуопределенного программирования. Однако явного вы-
ражения из полученного результата не следует даже для случая единичной
ковариационной матрицы.
Принципиальной особенностью рассматриваемой в данной статье задачи
является то, что математическое ожидание смещено относительно центра ша-
ра. К этой постановке наиболее близка работа [14], в которой получен аналог
неравенства Селберга [2]. Однако в многомерном случае полученное неравен-
ство дает лишь верхнюю оценку для искомой вероятностной границы. В [15]
решалась аналогичная задача, но на более узком классе распределений, обра-
зованных смесями гауссовских векторов со случайной ковариационной мат-
рицей. Вместе с тем вид искомой границы в несмещенном случае очевиден:
он дается неравенством Маркова.
Отметим также, что точная верхняя грань вероятности попадания в шар,
а равно и в любое другое выпуклое множество, получается по единой фор-
муле Маршалла-Олкина [4]. Этот результат можно обобщить на случай объ-
единения нескольких непересекающихся выпуклых множеств [16]. Поэтому
вычисление верхней грани вероятности выхода за границы выпуклого мно-
гогранного множества может быть сведено к эффективной алгоритмической
процедуре даже в том случае, если на распределение случайного вектора
дополнительно накладывается условие унимодальности [17]. Без условий на
моментные характеристики, но с ограниченным носителем унимодального
распределения максимум вероятности непопадания в выпуклое множество
достигается на равномерном распределении [18-20].
Тем самым данная статья посвящена получению точной вероятностной
границы, явное выражение для которой до сих пор неизвестно.
Статья организована следующим образом: в разделе 2 приведены форму-
лировка проблемы и предварительные замечания; в разделе 3 изложен вывод
искомой вероятностной границы и дана формулировка основного результа-
та; в разделе 4 представлен сравнительный анализ способов вычисления и
оценки искомой границы; в разделе 5 рассмотрено приложение полученно-
го результата к задаче проверки гауссовской гипотезы против альтернативы
39
с произвольным распределением; в Приложении даны доказательства вспо-
могательных утверждений.
2. Постановка задачи и предварительные замечания
Рассмотрим класс всевозможных распределений P(µ, R) случайного век-
тора X ∈ Rn с заданными математическим ожиданием и ковариационной
матрицей
(1)
MX = µ, cov{X,X} = R.
Матрица R предполагается положительно определенной: R ≻ O.
Цель данной работы определить точную верхнюю грань вероятности
того, что вектор c неизвестным распределением и указанными моментными
характеристиками окажется вне шара
Bt = {x: ∥x∥ ≤ t},
где ∥ · ∥ евклидова норма.
Задача 1. Для заданных t > 0, µ ∈ Rn и R ≻ O определить
(2)
pt(µ,R) = sup P{X ∈ Bt
}.
X∼P(µ,R)
Указанную границу принято называть чебышевской по аналогии с нера-
венством Чебышева, которое дает неулучшаемую верхнюю оценку для веро-
ятности выхода за границы интервала
P{|X - µ| ≥ t} ≤ min{σ2/t2, 1}
для скалярных случайных величин X ∼ P(µ, σ2).
Если же интервал смещен относительно математического ожидания µ, то
известно неравенство Селберга [2]
(
)
σ2/
σ2 + (t - r)2
,
σ2 + r2 ≤ rt,
(i)
(3)
P{|X| ≥ t} ≤ s(1)t(r, σ) =
(σ2 + r2)/t2,
rt ≤ σ2 + r2 ≤ t2, (ii)
1,
σ2 + r2 ≥ t2,
(iii)
которое определяет точную вероятностную границу на том же классе распре-
делений P(µ, σ2), где r = |µ|.
Для случайных векторов X ∼ P(µ, R) аналог неравенства Чебышева (2)
имеет вид соотношения
P{∥X - µ∥ ≥ t} ≤ M∥X - µ∥2/t2 = tr R /t2,
которое получается применением неравенства Маркова к величине ∥X - µ∥.
40
Следовательно, при µ = 0 граница (2) известна:
{
}
pt(0,R) = min
tr R/t2, 1
(см. также лемму 3 из [7], где построено распределение, на котором достига-
ется указанная граница).
Однако при µ = 0 неравенство Маркова описывает лишь верхнюю оценку
{(
)∕
}
(4)
pt(µ,R) ≤ min
tr R + ∥µ∥2
t2, 1
,
о которой неизвестно, является ли она точной.
Если шар Bt заменить на эллипсоид
Et = {x ∈ Rn : ∥Ax∥ ≤ t},
где A невырожденная квадратная матрица, то в силу эквивалентности
условий X ∼ P(µ, R) и AX ∼ P(Aµ, ARA∗) проблема нахождения наиболь-
шей вероятности выхода вектора X за границы эллипсоида приводится к за-
даче 1
sup P{X ∈ Et} = pt(Aµ,ARA∗).
X∼P(µ,R)
Точная верхняя грань вероятности попадания внутрь шара при тех же
условиях на моменты случайного вектора (1) вычисляется по известной фор-
муле Маршалла Олкина (см., например, [2, теорема 13.8.2] и [16, теоре-
ма 6.1]):
1
sup
P{X ∈ Bt} =
,
X∼P(µ,R)
1+δ2
где величина δ2 определяется двумя эквивалентными способами
{
}
δ2 = inf
R-1x,x :x+µ∈Bt
=
x∈Rn
{
}
= sup
〈Ra,a〉-1
: 〈a, x〉 ≥ 1 ∀ x: x + µ ∈ Bt
a∈Rn
При этом шар Bt можно заменить на любое выпуклое множество.
Важно отметить, что задача о поиске чебышевской границы для веро-
ятности попадания в множество, задаваемое несколькими квадратичными
ограничениями, решена в [13] алгоритмически путем сведения к задаче по-
луопределенного программирования (SDP). Благодаря этому, при неболь-
шой размерности случайного вектора численное решение задачи 1 может
быть получено эффективными программными средствами [21, 22]. Вместе
с тем запись в виде SDP не позволяет ответить на вопрос о точности
41
неравенства Маркова (4). Кроме того, открытым остается вопрос о при-
менимости решения в виде SDP к задачам, где определение искомой че-
бышевской границы является лишь подзадачей в более общей постанов-
ке. К таким постановкам относится, например, задача минимаксного оце-
нивания: в ней наихудшую вероятность ошибки необходимо максимизиро-
вать на множестве неопределенных характеристик модели наблюдения, а
затем минимизировать на классе рассматриваемых оценок [7]. Даже если
указанная вероятность вычисляется явно через среднеквадратичную ошиб-
ку, применение метода SDP к задаче минимаксного оценивания является
нетривиальным [23].
3. Вывод общего решения и основные подзадачи
Будем рассматривать задачу 1 как проблему моментов. Для этого введем
обозначения: M+ семейство всех неотрицательных конечных борелевских
мер на Rn, I{. . . } индикаторная функция, а также
)
(
)
∗
(1
x
1
0
Γ(x) =
и diag [1, R] =
x xx∗
0
R
Тогда границу (2) можно записать в виде
pt(µ,R) = sup P{X + µ ∈ Bt} =
X∼P(0,R)
{∫
∫
}
= sup
I{x + µ ∈ Bt} Q(dx): Γ(x) Q(dx) = diag [1, R]
,
Q∈M+
где интегралы берутся по всему Rn.
Если ввести сопряженную переменную произвольную симметричную
матрицу
)
∗
(λ0 λ
(5)
M=
,
λ0 ∈ R, λ ∈ Rn, Λ ∈ Rn×ns,
λ Λ
то получаем максиминное выражение:
∫
(6) pt(µ, R) = sup
inf
I{∥x + µ∥ ≥ t} Q(dx) +
M
Q∈M+
[
(
∫
)]
+ tr M diag [1, R] - Γ(x) Q(dx)
В силу предположения R ≻ O матрица diag [1, R] представляет собой внут-
реннюю точку множества моментов
{∫
}
Γ(x) Q(dx): Q ∈ M+
42
в пространстве симметричных матриц Rsn+1)×(n+1) [2, c. 497]. Тогда по тео-
реме 12.2.1 из того же источника получаем, что супремум и инфимум в (6)
можно поменять местами. Дальше нужно заметить, что супремум по Q от
∫
интеграла
... dQ равен нулю, только если подынтегральное выражение
меньше или равно нулю, а в противном случае супремум равен +∞. Это
позволяет включить ограничение на подынтегральную функцию в задачу
минимизации:
pt(µ,R) = inf
{λ0 + tr [ΛR]: I{∥x + µ∥ ≥ t} ≤ q(x|M) ∀ x},
λ0,λ,Λ
где обозначено
q(x|M) = tr [MΓ(x)] = λ0 + 2〈λ, x〉 + 〈Λx, x〉.
Теперь заметим, что ограничение снизу на квадратичную форму q(x|M)
гарантирует ее неотрицательность, что равносильно условию неотрицатель-
ной определенности матрицы: M ≽ O. Это видно из соотношения
〈M x, x〉 = x20 q(x/x0|M) ≥ 0
при любом x = col [x0, x], таком что x0 ∈ R \ {0}, x ∈ Rn.
Поэтому с учетом обозначений (5) и
(7)
qt(M) = inf
{q(x|M): ∥x + µ∥ ≥ t}
x∈Rn
получаем
(8)
pt(µ,R) = min
{λ0 + tr [ΛR]: qt
(M) ≥ 1} ,
M≽O
где минимум достигается в силу замкнутости и ограниченности множества
{M ≽ O: qt(M) ≥ 1, λ0 + tr [ΛR] ≤ 1}, в которое дополнительное введено огра-
ничение согласно pt(µ, R) ≤ 1.
Наименьшее значение q0(M) квадратичной формы q(x|M) на всем про-
странстве достигается в точках x, удовлетворяющих уравнению
(9)
Λx + λ = 0.
Это уравнение разрешимо в силу условия M ≽ O, которое для блочной мат-
рицы имеет вид [24, раздел 9.1.6]:
Λ ≽ O, λ ∈ im[Λ],
〈Λ+λ, λ〉 ≤ λ0,
где im образ линейного оператора (пространство столбцов матрицы).
Если матрица Λ вырожденная, то уравнение (9) описывает аффинное под-
пространство, которое заведомо пересекается с областью {x: ∥x + µ∥ ≥ t}.
43
Поэтому qt(M) = q0(M) = λ0 - 〈Λ+λ, λ〉, что по условию должно быть боль-
ше или равно единице. Тогда значение минимизируемой в (8) функции тоже
оценивается снизу единицей
λ0 + tr [ΛR] ≥ 1 + Λ+λ,λ + tr [ΛR] ≥ 1.
Следовательно, при pt(µ, R) < 1 случай вырожденной матрицы Λ можно за-
ведомо исключить из оптимизации, т.е. определен минимум
(10)
pt
(µ, R) =
{
}
= min
λ0 + tr [ΛR]: 1 - qt(M) ≤ 0, Λ-1λ,λ -λ0 ≤0
λ0,λ∈Rn,Λ≻O
Оба ограничения в (10) удовлетворяют условию Слейтера, т.е. неравен-
ства выполнены строго при определенном выборе переменных: например,
при Λ = I, λ = 0 и достаточно большом λ0. Кроме того, функции в левой
части обоих неравенств являются выпуклыми по блочной матричной пере-
менной M, такой что Λ ≻ O. Действительно, функция 1 - qt(M) представля-
ет собой супремум линейных форм, а надграфик функции 〈Λ-1λ, λ〉 - λ0 = y
описывается линейным матричным неравенством M + diag [y, O] ≽ O.
Если pt(µ, R) < 1, то в силу (10) по теореме Куна-Таккера о седловой
точке [25, с. 85] получаем
(11) pt(µ, R) =
{
(
)}
= max
inf
λ0 + tr [ΛR] + k(1 - qt(M)) + ℓ
Λ-1λ,λ -λ0
k≥0, ℓ≥0
λ0,λ∈Rn,Λ≻O
Первая задача, возникающая на пути нахождения pt(µ, R), состоит в ми-
нимизации квадратичной формы на дополнении к шару (7). Решение дано
в следующей лемме.
Лемма 1. Для любых λ0 ∈ R, λ ∈ Rn и Λ ≻ O точная нижняя грань (7)
равна
{
}
(12)
qt(M) = qt(-µ|M) + sup t2c - (Λ - cI)-1 ν,ν
,
c∈[0,σΛ)
где ν = λ - Λµ, а σΛ минимальное собственное значение матрицы Λ.
Доказательство леммы 1 дано в Приложении.
Благодаря тому, что в (11) перед qt(M) стоит отрицательный коэффициент,
включим супремум по c во внутреннюю задачу минимизации, а также учтем
замену переменной λ = ν + Λµ, где ν пробегает все пространство Rn:
{
pt(µ,R) = max
inf
λ0 + tr [ΛR] +
k≥0, ℓ≥0
λ0,ν,Λ≻cI,c≥0
[
]
+ k 1 - λ0 + 2〈ν + Λµ,µ〉 - 〈Λµ,µ〉 - t2c + (Λ - cI)-1 ν,ν
+
}
[
]
+ℓ
Λ-1 (ν + Λµ),ν + Λµ - λ0
44
Поскольку λ0 входит линейно и пробегает всю действительную ось, точная
нижняя грань по λ0 будет равна нулю только при условии, что соответствую-
щий коэффициент равен нулю: 1 - k - ℓ = 0. В противном случае инфимум
будет равен -∞, откуда
{
pt(µ,R) = max
inf
tr [ΛR] +
0≤k≤1
ν,Λ≻cI,c≥0
[
]
+ k 1 - t2c + 〈Λµ,µ〉 + 2〈µ,ν〉 + (Λ - cI)-1 ν,ν
+
}
+ (1 - k) Λ-1 (ν + Λµ) , ν + Λµ
Выражение, стоящее под знаком inf и рассматриваемое как функция пе-
ременной ν, представляет собой положительно определенную квадратичную
форму, которая без учета свободного коэффициента имеет вид
〈Aν, ν〉 + 2〈µ, ν〉, где A = k(Λ - cI)-1 + (1 - k)Λ-1 ≻ O.
Поэтому ее минимум равен -〈A-1µ, µ〉. Тогда
{
(
)
}
pt(µ,R) = max
inf
k - kt2c + tr[ΛR] +
Λ-A-1
µ,µ
,
0≤k≤1
Λ≻cI,c≥0
где
(
)
Λ - A-1 = kc I + (1 - k)c(S + kcI)-1
Если обозначить S = Λ - cI, то инфимум по Λ от выражения, стоящего
в фигурных скобках, будет равен
(
)
(13) k + c
tr R - kt2 + k∥µ∥2
+
{
}
+ inf tr [SR] + k(1 - k)c2 (S + kcI)-1 µ, µ
S≻O
Для дальнейшего нахождения искомой границы понадобится следующий
факт.
Лемма 2. Для заданных R ≻ O, b ∈ Rn и γ > 0 верно равенство
{
}
(14)
inf tr [SR] + (S + γI)-1 b, b
=
S≻O
∥b∥2/γ,
R-1b,b ≤γ2,
= (I - ξ2 (R + ξI)-2 )b,b ∕γ,R-1b,b
>γ2,
где ξ
единственное положительное решение уравнения
(15)
R (R + ξ I)-2 b, b =γ2.
45
Доказательство леммы 2 дано в Приложении.
Если обозначить bb∗ = k(1 - k)c2µµ∗, γ = kc и
(16)
d0 = R-1
µ,µ ,
то по лемме 2 получаем, что точная нижняя грань в (13) равна
(1 - k)c∥µ∥2,
k ≥ d0/(d0 + 1),
(1 - k)cf(k/(1 - k)),
0 < k < d0/(d0 + 1),
где f(δ) функция положительного аргумента, определяемая по правилу
(
)
(17)
f (δ) =
I - ξ2 (R + ξI)-2
µ,µ
с учетом того, что ξ это решение уравнения
(18)
R (R + ξI)-2
µ,µ
= δ.
Если еще учесть случай k = 0, то искомая граница
{
}
(19)
pt(µ, R) = max
0, p(1), p(2)
выражается через
{
(
)}
(20)
p(1) =
sup
inf
k+c
tr R - kt2 + ∥µ∥2
,
c≥0
k∈[d0/(d0+1),1]
{
(
)
}
(21)
p(2) =
sup
inf
k+c
tr R - kt2 + k∥µ∥2
+ (1 - k)cf(k/(1 - k))
c≥0
k∈(0,d0/(d0+1))
В обоих выражениях инфимум по c будет либо равен нулю (когда соот-
ветствующий коэффициент неотрицателен), либо равен -∞. Поэтому если
ограничения
{
(
)
}
(22)
d0/(d0 + 1) ≤ k ≤ min
1,
tr R + ∥µ∥2
/t2
совместны, то p(1) равно правой части; если же нет, то p(1) = -∞. Аналогич-
но, p(2) равно точной верхней грани тех чисел k ∈ (0, d0/(d0 + 1)), которые
удовлетворяют
(
)
(23)
tr R - k
t2 - ∥µ∥2
+ (1 - k)f(k/(1 - k)) ≥ 0.
Дальнейшие сведения об этом неравенстве даны в следующей лемме.
Лемма 3. Обозначим
(
)
(24)
p=
tr R + ∥µ∥2
/t2
и dξ = R(R + ξI)-2
µ,µ
и допустим, что p < 1 и µ = 0, тогда:
46
(i)
(ii)
d0
p
p
-----
-----
1 - p
1 - p
d0
ˆ
h
x
h
x
x
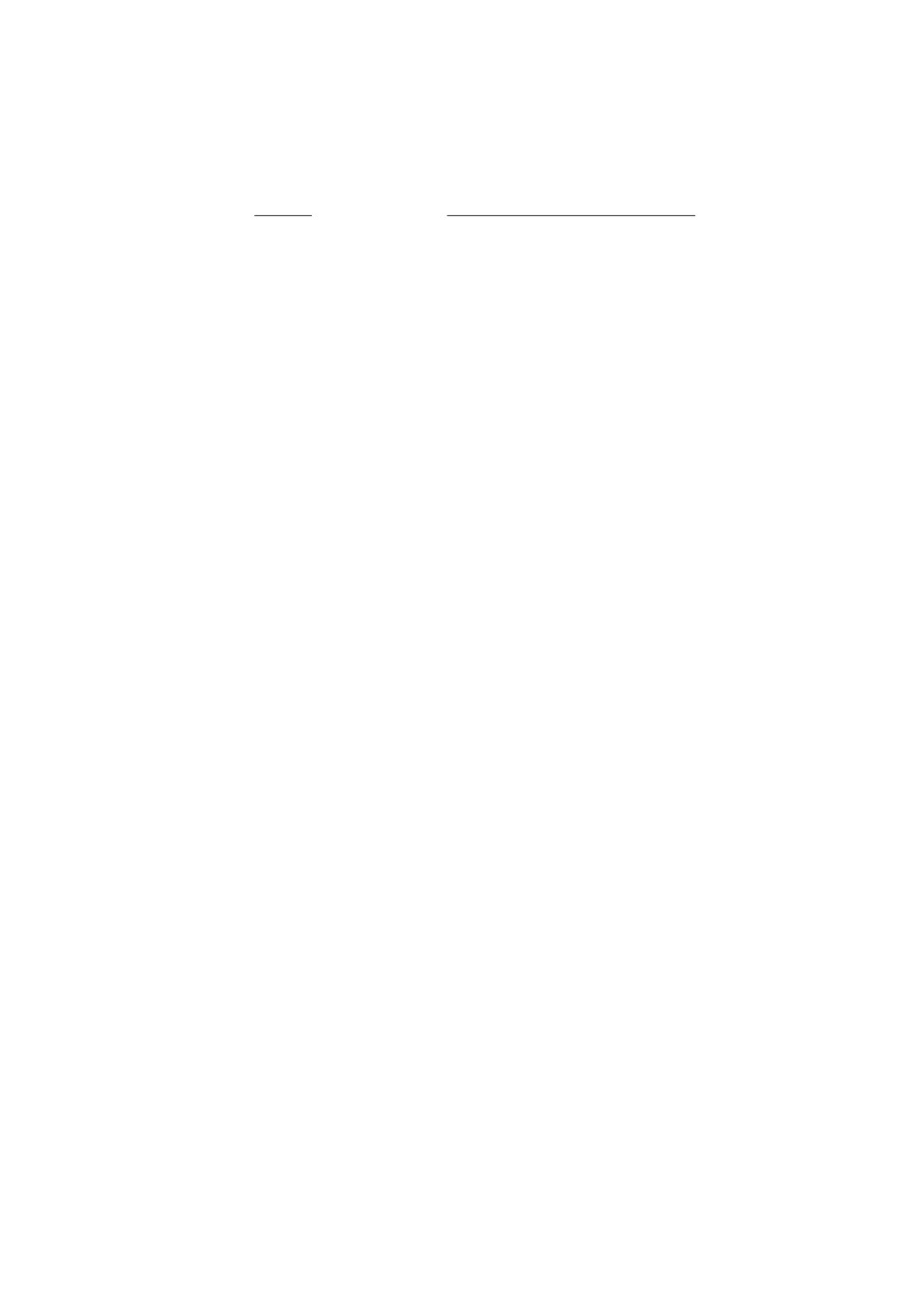
Рис. 1. Левая часть уравнения (25) как функция переменной ξ в случае (i)
(слева) и в случае (ii) (справа).
(i) если ограничения (22) несовместны, то множество решений нера-
венства (23) имеет вид (0,k], гдеk
единственное число k, на кото-
ром (23) обращается в равенство на интервале (0, d0/(d0 + 1)); это число
равноk = dξ/(1 + dξ), где ξ единственное решение уравнения
(
(
)
)
(25)
R+
ξ2/η
I
(R + ξ I)-2
µ,µ
= p/(1 - p)
при
0 < ξ < η = t2(1 - p);
левая часть этого уравнения является гладкой убывающей функцией;
(ii) если же ограничения (22) совместны, то (23) выполнено для всех
k ∈ (0,d0/(d0 + 1)).
Доказательство леммы 3 дано в Приложении.
Графическая иллюстрация утверждения леммы 3 представлена на рис. 1.
Итак, при p < 1 в случае (i) в силу p(1) = -∞ имеем pt(µ, R) = p(2) =k, где
k описано в лемме 3, а в случае (ii) p(1) = p и p(2) = d0/(d0 + 1) ≤ p, откуда
в силу (19) искомая граница совпадает с p. В случае p ≥ 1 из (22) следует
pt(µ,R) = p(1) = 1.
Отметим, что в случае (i) при p ↑ d0/(d0 + 1) решение ξ уравнения (25)
стремится к нулю, откуда предел dξ/(dξ + 1) при ξ ↓ 0 совпадает со значением
искомой границы, вычисленной в случае (ii) при p = d0/(d0 + 1). Тем самым
этот пограничный случай можно отнести к обеим ветвям решения (i) и (ii).
Теперь можно сформулировать окончательный результат о виде вероят-
ностной границы (2).
Теорема 1. При произвольных t > 0, µ ∈ Rn и R ≻ O вероятностная
граница (2) в обозначениях (16) и (24) имеет вид
dξ/(dξ + 1),
p ≤ d0/(d0 + 1),
(i)
(26)
pt(µ,R) =
p,
d0/(d0 + 1) ≤ p ≤ 1, (ii)
1,
p ≥ 1,
(iii)
где ξ > 0 находится из решения уравнения (25).
47
t/
n
t2/n
(ii)
(iii)
(ii)
(iii)
(i)
s2
s
(i)
0
r
t
0
r2
t2
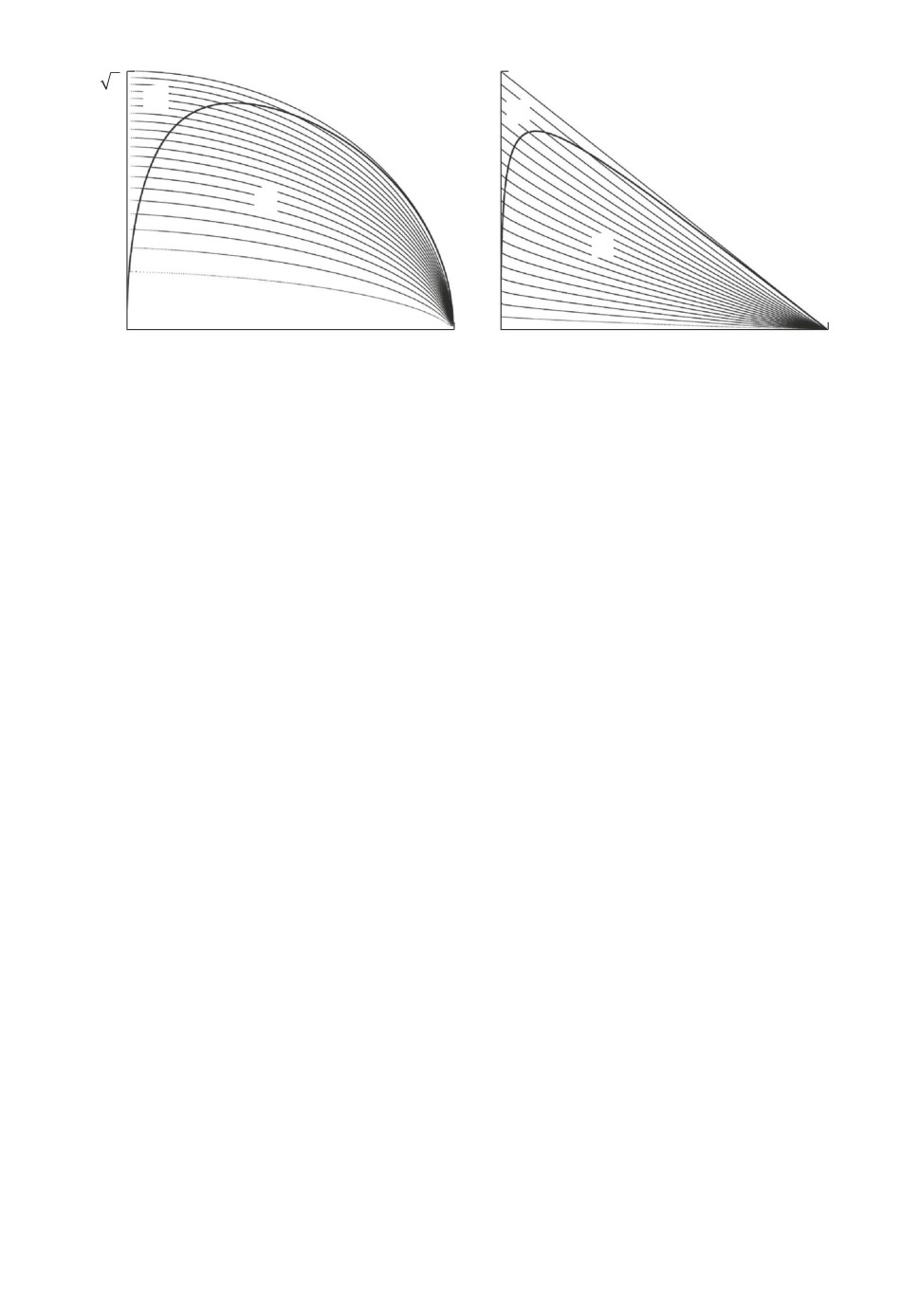
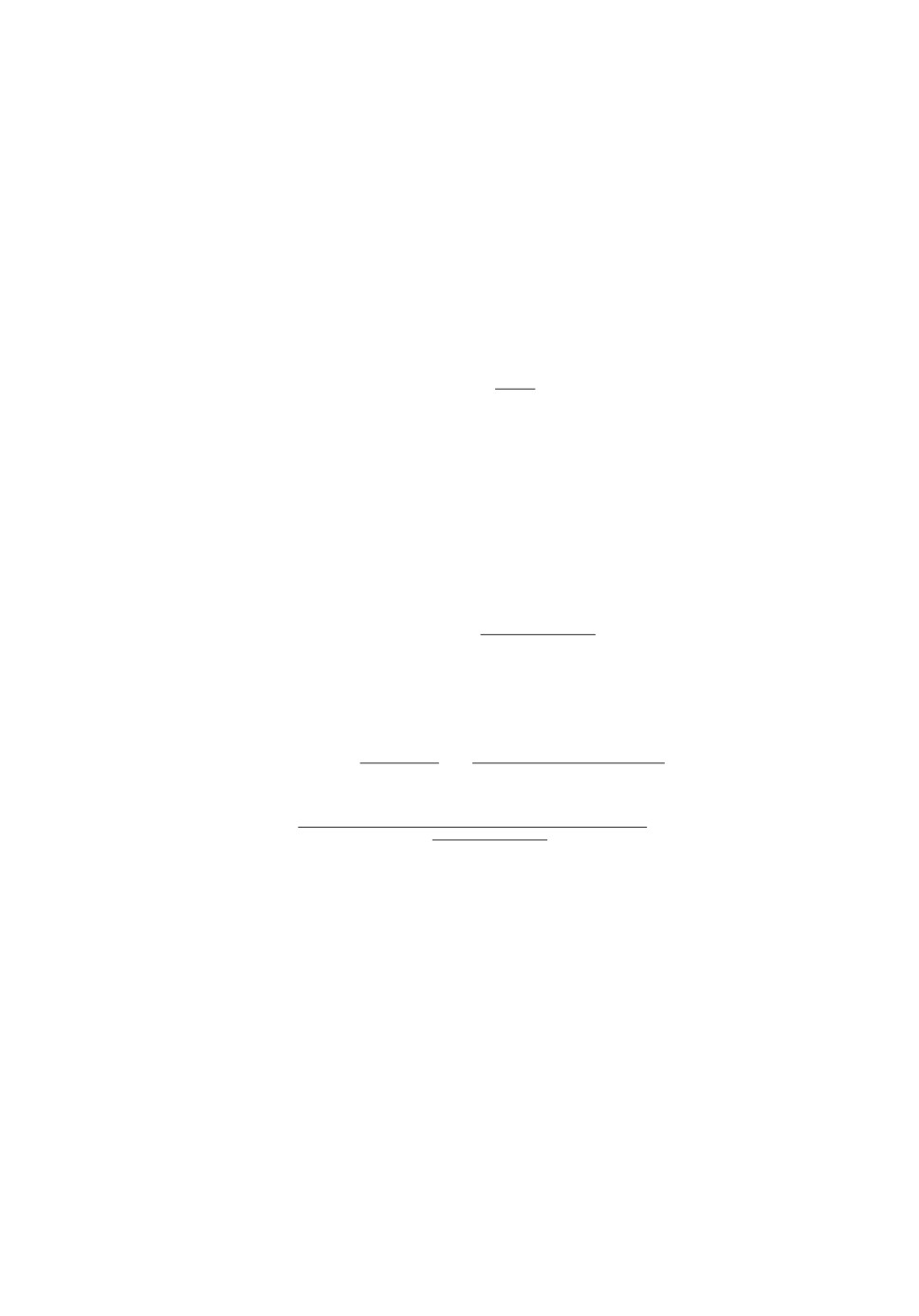
Рис. 2. Линии уровня вероятностной границы s(n)t(r, σ) = k/20 для k = 1, . . . , 20
в переменных r, σ (слева) и в переменных r2, σ2 (справа).
При достаточно большом радиусе, т.е. при
(
)(
)
t2 >
1 + 1/〈R-1µ,µ〉
tr R + ∥µ∥2
,
дробь p = ( tr R + ∥µ∥2)/t2, будучи правой частью неравенства Маркова (4),
определяет для вероятностей P{∥X∥ ≥ t}, X ∼ P(µ, R), завышенную оценку
по сравнению с точной границей (26), (i). Вместе с тем в случае (ii) неравен-
ство Маркова дает неулучшаемую границу для указанных вероятностей.
Формула (19) позволяет получить для найденной границы простую оценку
снизу
{
tr R/(t2 - ∥µ∥2), t2 ≥ tr R + ∥µ∥2,
(27)
pt(µ,R) ≥
1,
t2 ≤ tr R + ∥µ∥2.
Действительно, каждое из выражений, стоящих в (20) и (21) под знаком
supinf, больше или равно величине k + c(tr R - kt2 + k∥µ∥2), которая после
взятия операции sup
inf дает правую часть (27).
c≥0
k∈(0,1]
Как верхняя оценка (4), так и нижняя оценка (27) оказываются меньше
единицы при одном и том же условии:
t2 > tr R + ∥µ∥2.
Если случайный вектор состоит из некоррелированных величин одина-
ковой дисперсии, то при наихудшем выборе его распределения вероятность
выхода за границы шара определяется явными соотношениями, поскольку
уравнение (25) имеет аналитическое решение.
Следствие 1. В случае ∥µ∥ = r и R = σ2In вероятностная граница (26)
равна
pt(µ,R) = s(n)t(r,σ),
48
где
(28) s(n)t(r, σ) =
σ2n2
(
)
(
)2 ,
p≤r2/
r2 + σ2
,
(i)
√
σ2n2 + t
p + n(1 - p) - r
(
)
=p,
r2/
r2 + σ2
≤ p ≤ 1, (ii)
1,
p ≥ 1,
(iii)
с учетом обозначения
(
)
p=
nσ2 + r2
/t2.
Доказательство следствия дано в Приложении.
Таким образом, для случайного вектора X ∼ P(µ, σ2In) имеет место
неулучшаемая оценка P{∥X∥ > t} ≤ s(n)t(r, σ), которую можно считать мно-
гомерным аналогом неравенства Селберга (3).
Линии уровня многомерной границы Селберга s(n)t(r, σ) изображены на
рис. 2 (для случая n = 50). Самая нижняя линия уровня соответствует веро-
ятности 0,05, выше
0,1, еще выше
0,15 и т.д. Из представленных графиков
можно сделать вывод, что при малых уровнях вероятности случай (i), соот-
ветствующий ранее не известной границе, является более типичным в сравне-
нии со случаем (ii), описывающим привычную границу из неравенства Мар-
кова.
4. Сравнительный анализ полученной
вероятностной границы
4.1. Сравнение с методом SDP
Сравним аналитический способ определения вероятностной границы (см.
теорему 1) с алгоритмическим методом, основанным на применении техники
линейных матричных неравенств [13].
В указанной работе для искомой вероятностной границы предлагаются
две эквивалентные формулировки в виде задач полуопределенного програм-
мирования:
а) нижняя граница
{
(Z z)
(R + µµ∗ µ)}
(29)
p
(µ, R) = sup
λ: tr[Z] - t2λ ≥ 0, O ≼
≼
,
t
z∗ λ
µ∗
1
Z,z,λ
где
Z ∈ Rn×ns, z ∈ Rn, λ ∈ R;
49
б) верхняя граница
{
(30) pt(µ, R) = inf
tr [(R + µµ∗)P ] + 2〈µ, q〉 + s:
P,q,s,τ
(
)
(
)
(
)
}
P q
τIn
0
P q
≽
,
≽ O, τ ≥ 0
,
q∗ s
0
1-τt2
q∗ s
где
P ∈ Rn×ns, q ∈ Rn, s,τ ∈ R.
Заметим, что если в (29) убрать ограничения на переменную z, то нера-
венства на две другие переменные примут вид:
O ≼ Z ≼ R + µµ∗ и 0 ≤ λ ≤ min{trZ/t2,1}.
Следовательно, максимум достигается на правых частях этих соотношений,
что дает границу Маркова (4). Если же в (30) ввести дополнительное ограни-
чение 1 - τt2 ≥ 0, то останется только первое матричное неравенство. Тогда
с учетом этого неравенства минимизация по переменным P,q,s дает выра-
жение τ tr [R + µµ∗] + 1 - τt2, минимум которого по τ ∈ [0, 1/t2] снова равен
границе Маркова.
Несмотря на то что указанные преобразования не являются эквивалент-
ными (из них следует лишь оценка сверху для обеих границ), приведенные
рассуждения свидетельствуют о том, что сведение задачи 1 к SDP не дает
возможности получить явное решение элементарными методами.
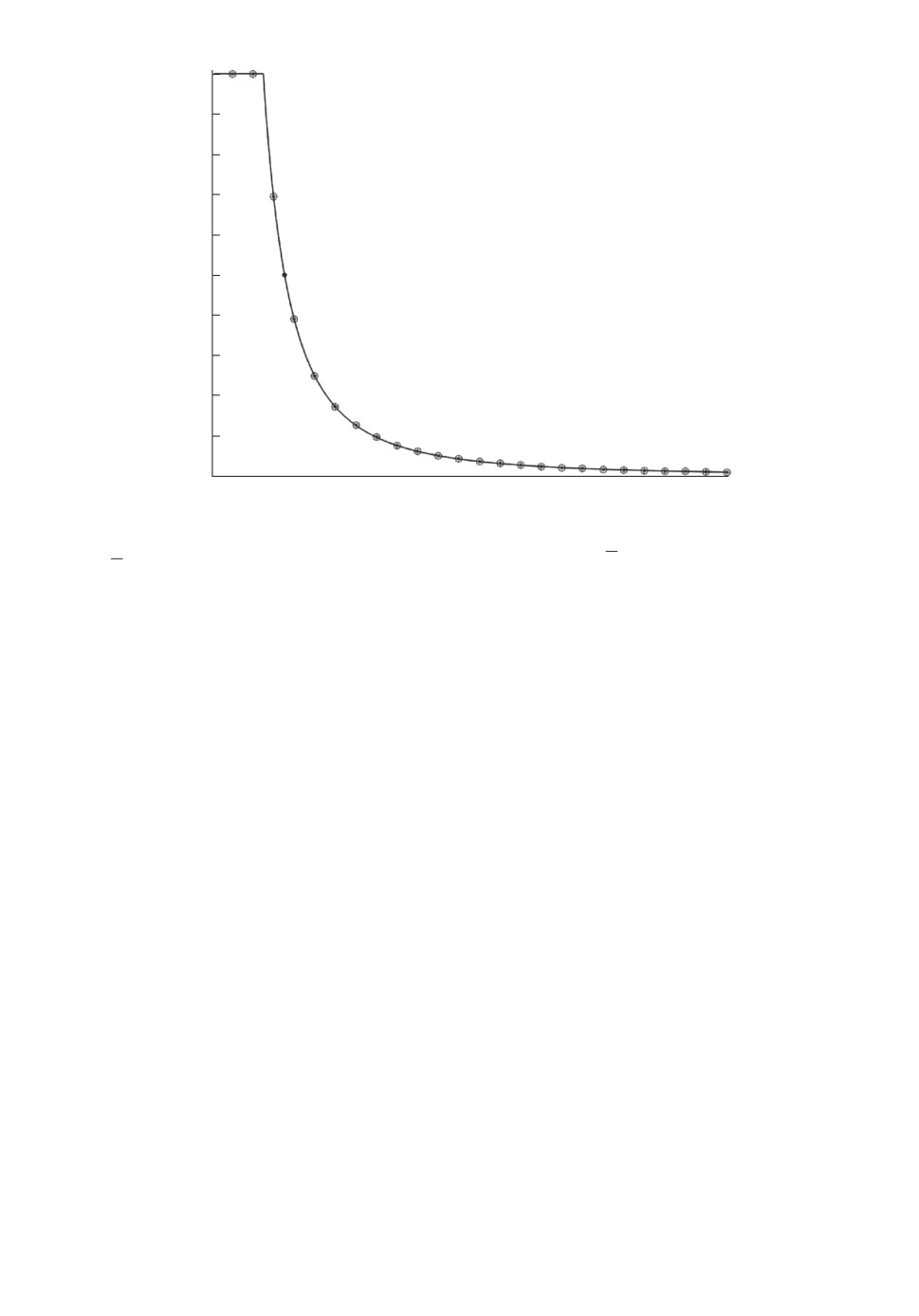
Рисунок 3 демонстрирует идентичность границы pt(µ, R), найденной с по-
мощью теоремы 1, границам p
(µ, R) и pt(µ, R), определяемым через решение
t
задач полуопределенного программирования (29) и (30). Участок кривой, со-
ответствующий новому выражению (не совпадающему с границей Маркова),
расположен правее жирной точки.
Вычисления были проведены для размерности n = 30, вектора математи-
ческого ожидания µ с одинаковыми компонентами и ковариационной матри-
цы R = σ2In, где σ = ∥µ∥.
4.2. Анализ чувствительности доверительного эллипсоида
Для сравнения точной границы pt(µ, R) с известными верхними оценками
рассмотрим задачу о расчете гарантированной надежности доверительного
эллипсоида.
Предположим, что для неизвестного вектора параметров θ ∈ Rn имеется
точечная оценкаθ, с помощью которой построен доверительный эллипсоид
{
}
(31)
Θt = θ ∈ Rn : 〈K-10(θ -θ), θ -θ〉 ≤ t2
50
1,0
0,9
0,8
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0
t
Рис. 3. Вероятностные границы pt(µ, R) (сплошная), p
(µ, R) (звездочки) и
t
pt(µ, R) (кружочки).
из расчета на некоторую номинальную ковариационную матрицу K0 и задан-
ный размер эллипсоида t > 0. При этом оценкаθ является смещенной, т.е.
b = Mθθ- θ = 0, а истинная ковариационная матрица cov{θ, θ} = K отлича-
ется от номинальной K0.
Задачу о расчете гарантированной надежности доверительного эллип-
соида можно сформулировать так: определить нижнюю грань вероятно-
стей Pθ{θ ∈ Θt} при условии, что оценка
θ имеет указанные выше мо-
ментные характеристики. Тогда искомая гарантированная надежность равна
1 - αt(b,K), где
{
}
(
)
αt(b,K) = sup P 〈K-10Y,Y 〉 > t2
= pt K-1/20b,K-1/20KK-1/2
0
Y ∼P(b,K)
Пример 1. В качестве номинального случая возьмем K0 = In, что можно
интерпретировать двумя способами. В задачах оценивания регрессии вектор
X = θ- θ играет роль вектора остатков с ковариационной матрицей, близкой
к единичной. В задачах фильтрации компоненты вектора X имеют смысл
процесса невязки, который в номинальном случае должен быть стандартным
белым шумом.
Требуется определить, насколько чувствителен доверительный эллипсо-
ид (31) по отношению к отклонению смещения b и ковариационной матри-
цы K от номинального случая 0 и In соответственно. В качестве показателя
чувствительности возьмем гарантированное значение вероятности, противо-
51
положной надежности:
(32)
αt(b,K) = sup P{∥X∥ > t} = pt
(b, K).
X∼P(b,K)
Способ вычисления характеристики (32) предлагается сравнить с двумя
другими методами ее оценки из [14, 15].
Первый из них получен в предположении, что случайный вектор описыва-
ется смесью нормальных распределений со случайной ковариационной мат-
рицей. С учетом обозначений [15] имеем
√
√
X =
A(
SZ - a),
где Z стандартный нормальный вектор, S не зависящая от него слу-
чайная матрица с симметричными положительно определенными значения-
ми, такая что MS = Σ, а параметры A ≻ O и a ∈ Rn должны удовлетво-
√
рять условиям MX = b и cov{X, X} = K. Нетрудно проверить, что -
Aa = b,
√
√
AΣ
A = K, откуда
〈Aa, a〉 = ∥b∥2, tr [ΣA] = tr K,
〈AΣAa, a〉 = 〈Kb, b〉.
Тогда в силу [15, теорема 2] получаем
(33) P{∥X∥ > t} ≤ pmixt(b, K) =
{
(
)
}
Cn
t
〈Kb, b〉
= min
tr K
-
, 1
,
t2 - ∥b∥2
t - ∥b∥
∥b∥2 + t∥b∥
где Cn известный коэффициент (например, C10 ≈ 0,50781, C100 ≈ 0,74381 и
C1000 ≈ 0,89215).
Второй способ оценки вероятности P{∥X∥ > t} получен в [14, теорема 2.2]
так же, как в настоящей статье на основе знания только двух моментов век-
тора X, т.е. на классе P(b, K), но дает возможность указать верхнюю границу
(34) P{∥X∥ > t} ≤ pupt(b, K) =
(
)
tr K/ tr K + (t - ∥b∥)2 , tr K + ∥b∥2 ≤ t∥b∥,
(i′)
(
)
=
tr K + ∥b∥2
/t2,
tr K + ∥b∥2 > t∥b∥, (ii′)
1,
tr K + ∥b∥2 ≥ t2,
(iii′)
которая в многомерном случае не является точной.
Для анализа чувствительности рассмотрим отдельно два случая, которые
определяют, что будет варьироваться, смещение или ковариационная мат-
рица.
Пусть в случае а) имеются три варианта значения нормы смещения
√
r = ∥b∥: 0) номинальное (т.е. нулевое) r = 0, 1) умеренное r =
2n и 2) боль-
√
шое смещение r = 2
2n. Сам вектор смещения b зададим в виде гармониче-
ского сигнала bk = c cos(νk + ν0), k = 1, . . . , n, где частота ν = 10π/n и сдвиг
52
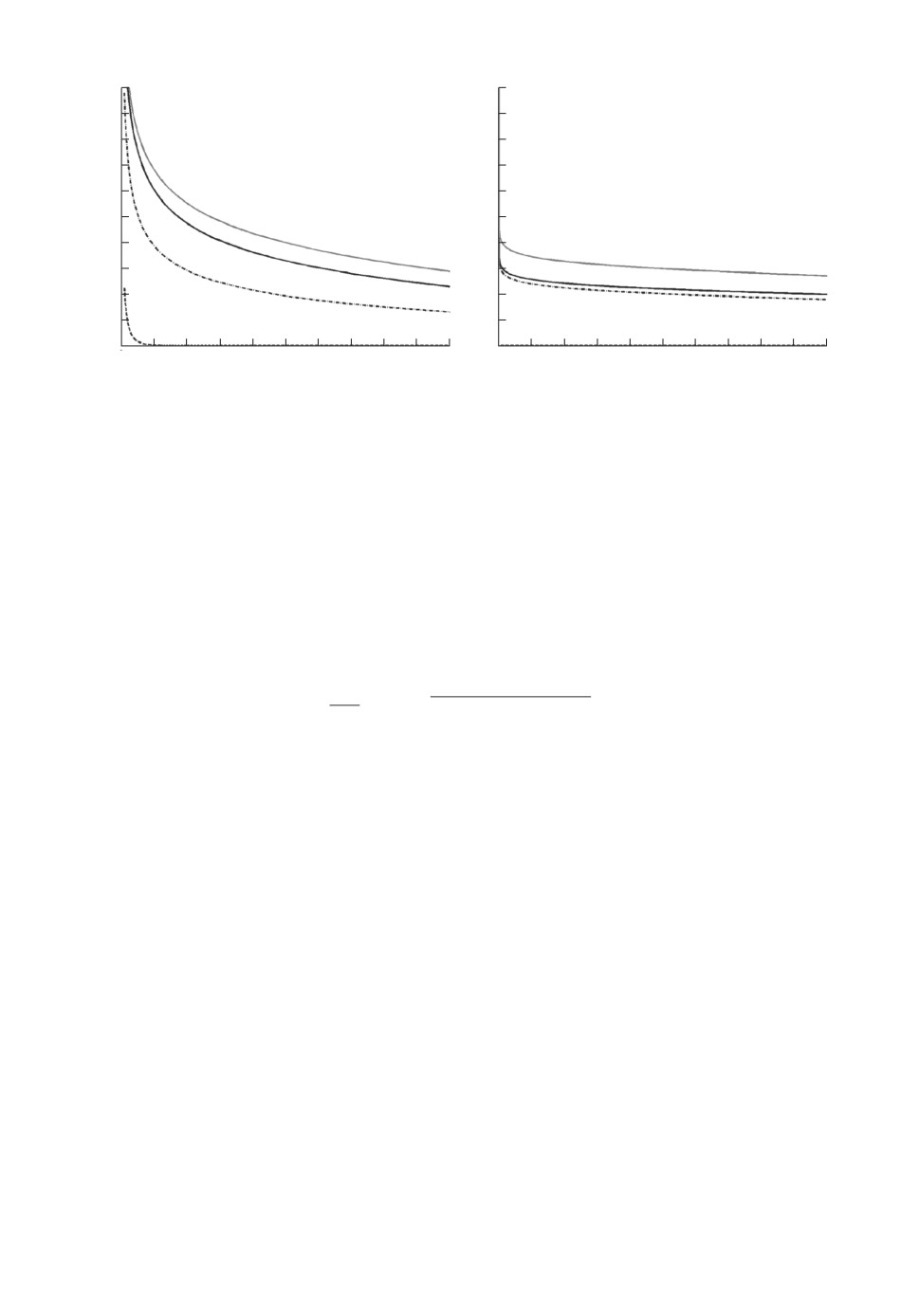
Рис. 4. Показатели чувствительности pt(b, K) (сплошные), pmixt(b, K) (штрихпунк-
тирные) и pupt(b, K) (пунктирные) для трех вариантов данных: 0) - светло-серые,
1) - темно-серые, 2) - черные: случай а) - слева; случай б) - справа.
ν0 = -π/4 фиксированы, а амплитуда c варьируется в зависимости от вариан-
тов 0), 1), 2). При этом ковариационная матрица соответствует номинальному
случаю: K = In.
В случае б) возьмем ковариационную матрицу K = {Kk,l}k,l=1,...,n, состав-
ленную из значений автокорреляционной функции процесса авторегрессии
первого порядка: Kk,l = a|k-l|, где a коэффициент авторегрессии. Рассмот-
рим три варианта его значений: 0) нулевая корреляция a = 0, что соответ-
ствует белому шуму, т.е. номинальному случаю K = In; 1) слабая корреляция
a = 0,5; 2) сильная корреляция a = 0,9. Вектор b здесь предполагается таким
же, как в случае а) при умеренной величине смещения.
Оба случая а) и б) рассматриваются для размерности n = 100.
Рисунок
4
описывает зависимость показателя
(32) и двух его оце-
нок (33), (34) от выбора параметра t (размера доверительного эллипсоида).
Эти зависимости изображены сплошными, штрихпунктирными и пунктирны-
ми линиями соответственно. Светло-серые кривые определяют то, что будет
для номинального варианта данных (b = 0 или K = In). Темно-серые кривые
соответствуют умеренному смещению (график слева) или слабой корреля-
ции (график справа). Черным цветом изображены кривые, которые построе-
ны для случая большого смещения (график слева) или сильной корреляции
(график справа).
Левый график свидетельствует о сильной чувствительности надежности
доверительного эллипсоида к величине смещения. Правый же график пока-
зывает обратную картину: наличие даже сильной корреляции мало влияет
на гарантированное значение надежности.
Важно отметить, что при наличии даже умеренного смещения но-
вая вероятностная граница pt(b, K) существенно точнее, чем ее верхняя
53
граница pupt(b, K). Только в случае нулевого смещения они совпадают:
pt(0,K) = pupt(0,K). Граница pmixt(b,K), которая построена для более узко-
го класса распределений, весьма чувствительна к увеличению смещения ∥b∥,
поэтому только при его малой величине, оказывается pt(b, K) > pmixt(b, K), а
с ростом ∥b∥ неравенство меняется на обратное. В этом случае при малых t
может оказаться, что pmixt(0, K) = 1 в то время, как pt(b, K) ≪ 1. Отметим
еще одну особенность границ (33) и (34): они не зависят (или почти не за-
висят) от корреляций. Поэтому на правом графике все три варианта данных
как для (33), так и для (34) представлены одной кривой.
Таким образом, новая вероятностная граница 1 - pt(b, K) дает наиболее
точную нижнюю оценку надежности доверительного эллипсоида.
5. Использование вероятностной границы
в задаче проверки гипотез
Предположим, что случайный вектор X ∈ Rn содержит эксперименталь-
ные данные, по которым необходимо принять решение об их соответствии
одной из двух конкурирующих гипотез H0 или H1. Особенностью рассмат-
риваемой постановки является то, что в случае альтернативы распределение
вектора X имеет заданные моментные характеристики, но в остальном явля-
ется полностью неопределенным.
Пример 2. Рассмотрим пару конкурирующих гипотез
(
)
(
)
HN0 : X ∼ N
0, σ20I
и H1: X ∼P
µ,σ2I
, µ∈Sr,
где Sr = {x ∈ Rn : ∥x∥ = r}, r = h√n, а σ0, σ, h заданные положительные
параметры. Тем самым согласно нулевой гипотезе HN0 вектор X состо-
ит из независимых центрированных гауссовских величин {Xi, i = 1, . . . , n}
с дисперсией D0Xi = σ20, в то время как альтернатива H1 описывается весь-
ма общими предположениями: совместное распределение величин {Xi} яв-
ляется неопределенным с точностью до задания первых двух моментов,
а именно, математические ожидания M1Xi = µi имеют ¾средний сдвиг¿
√(
)
h=
µ21 + ... + µ2n
/n (это верно, например, при µi = ±h), дисперсии оди-
наковы D1Xi = σ2, ковариации нулевые, т.е. cov1{Xi, Xj } = 0 при i = j (усло-
вие независимости не накладывается).
Будем исходить из того, что σ0 > σ. Поэтому статистический вывод в поль-
зу альтернативы можно интерпретировать как свидетельство о том, что
в данных присутствует сдвиг, который нельзя списать на наличие большей
дисперсии.
Для задания критического множества воспользуемся результатом приме-
нения критерия отношения правдоподобия к задаче проверки исходной гипо-
тезы HN0 против гауссовской альтернативы
(
)
HN1 : X ∼ N
µ,σ2I
,
µ∈Sr.
54
Если f0(x), f1(x, µ) плотности распределений N (0, σ20I) и N (µ, σ2I) со-
ответственно, то статистика отношения правдоподобия
T (x) = sup f1(x, µ)/f0(x), x ∈ Rn,
µ∈Sr
позволяет задать критическое множество в виде
(35)
K = {x ∈ Rn: T(x) > τα
},
где число τα определяется из условия на заданный уровень ошибки первого
рода P0{X ∈ K} = α. Проверим, что критическое множество имеет форму
шара.
Условие T (x) > τα равносильно тому, что для некоторой константы будет
верно
{
}
(36)
max
-∥x - µ∥2/σ2 + ∥x∥2/σ20
> const.
µ: ∥µ∥=r
Указанный максимум равен (1/σ20 - 1/σ2)∥x∥2 + 2r∥x∥/σ2 с точностью до ад-
дитивной постоянной. Если обозначить a = 1 - σ2/σ20 > 0, то при подходящем
выборе числа c неравенство (36) эквивалентно следующему:
(37)
a∥x∥2
− 2r∥x∥ - c < 0.
При неотрицательных c (и только при них) множество решений (37) имеет{
}
√
вид ограничения ∥x∥ < t, где t = r +
r2 + ac
/a. Следовательно, критиче-
ское множество (35) принимает форму шара K = Bt, если t ≥ 2r/a, т.е.
√
(38)
t≥2
n h/a.
Тогда вероятность ошибки первого рода равна
{
}
(
)
αNt = P0{∥X∥ < t} = P0
∥X/σ0∥2 < (t/σ0)2
(t/σ0)2
,
= Fχ2(n)
где Fχ2(n)(·) функция распределения хи-квадрат c n степенями свободы.
В случае гауссовской альтернативы X ∼ N (µ, σ2I) ошибка второго рода
определяется как
βNt = sup P1{∥X∥ > t}.
µ∈Sr
Используя представление X = σ U + µ, где U ∼ N (0, I), получаем
{
}
P1{∥X∥ > t} = P
∥U + µ/σ∥2 > (t/σ)2
,
откуда
(
)
βNt = 1 - Fχ2(n;(r/σ)2)
(t/σ)2
,
55
где Fχ2(n;δ)(·)
функция нецентрального распределения хи-квадрат c n сте-
пенями свободы и параметром нецентральности δ.
Выражение для ошибки второго рода относительно альтернативы H1 да-
ется формулой (28):
βt = sup
sup P1{∥X∥ > t} = s(n)t(r,σ).
µ∈Sr X∼P(µ,σ2I)
Для сравнения приведем еще два варианта вычисления ошибки второго
рода: с помощью неравенства Маркова
{
}
{
}
(39)
βMt = sup min
M1∥X∥2/t2, 1
= min
n(h2 + σ2)/t2, 1
µ∈Sr
и с помощью границы (33)
(
)
(40)
βmixt = sup pmixt
µ,σ2In
,
µ∈Sr
предложенной в
[15] для более узкого по сравнению с семейством
⋃
P(µ, σ2In) класса распределений.
µ∈Sr
Отметим, что при всех способах вычисления ошибки второго рода опера-
ция максимизации по µ ∈ Sr может быть опущена.
Чтобы отделить вероятности обеих ошибок от единицы, предположим, что
M0∥X∥2 > t2 и M1∥X∥2 < t2, т.е. r2 + nσ2 < t2 < nσ20, откуда
√
(41)
n (h2 + σ2) < t <
√n σ0.
Тем самым ограничение
h2 < σ20 - σ2
можно считать условием различимости пары конкурирующих гипотез, кото-
рое означает, что наличие неопределенного по направлению сдвига можно
установить лишь при относительно небольшой его величине.
Теперь радиус t критической области K = Bt можно рассматривать в ка-
честве независимой переменной из диапазона (41) c учетом (38). Построим
параметрические кривые (αNt , βt) и (αNt , βNt ), отражающие взаимную зависи-
мость вероятностей ошибок первого и второго рода для двух альтернатив H1
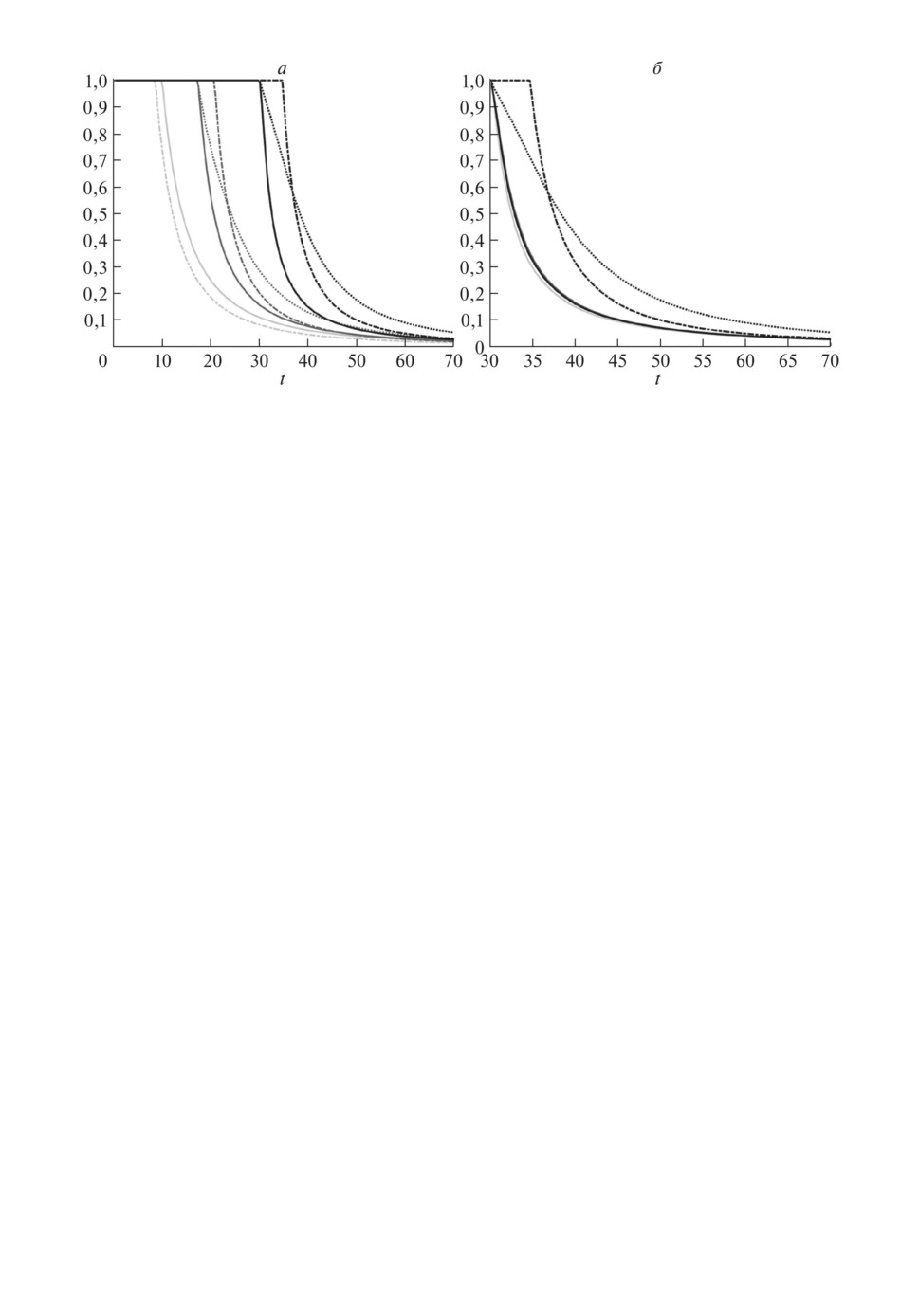
и HN1 (см. рис. 5). Для сравнения на тех же графиках изображены кривые
(αNt , βMt ) и (αNt , βmixt), в которых вероятность ошибки второго рода оценива-
ется с помощью выражений (39) и (40). Рисунки построены при следующем
соотношении между параметрами: σ/σ0 = 0,3, h/σ = 0,7 (для случая n = 10
и n = 100).
Из представленных рисунков можно сделать вывод о том, что на различи-
мость гипотез кардинально влияет наличие условия независимости. Напри-
мер, относительно гауссовской альтернативы HN1 ошибка второго рода βNt
56
b
b
a
б
0,50
0,50
0,45
0,45
0,40
0,40
0,35
0,35
0,30
0,30
0,25
0,25
0,20
0,20
0,15
0,15
0,10
0,10
0,05
0,05
0
0,1
0,2
0,3
0,4
0,5
0
0,1
0,2
0,3
0,4
0,5
a
a
Рис. 5. Вероятности ошибок: (αNt , βt) (сплошная черная), (αNt , βNt ) (штрихо-
вая), (αNt , βMt ) (сплошная серая), (αNt , βmixt) (штрихпунктирная) для размер-
ности n = 10 (слева) и n = 100 (справа).
быстро стремится к нулю при увеличении размерности n, которая здесь
имеет смысл числа независимых наблюдений. Однако в случае общей аль-
тернативы H1 увеличение n не ведет к статистической избыточности, по-
скольку минимально возможное значение ошибки второго рода βt отделено
от нуля:
1
lim
βtn ≥
,
n→∞
(σ0/σ)2 - (h/σ)2
где tn любой критический уровень из диапазона (41).
Отметим, что такое положение дел остается в силе и для более узких клас-
сов распределений, например для смеси нормальных распределений со слу-
чайной ковариационной матрицей. Судя по рис. 5, на таком классе распреде-
лений известная граница ведет себя лишь немногим лучше, чем многомерная
граница Селберга.
6. Заключение
В статье решена задача о точной верхней грани вероятности непопадания
случайного вектора в шар при условии, что распределение произвольное,
моментные характеристики первого и второго порядков заданные, а сме-
щение математического ожидания относительно центра шара ненулевое.
Если компоненты случайного вектора имеют одинаковую дисперсию и
некоррелированы, то искомая чебышевская граница описывается аналити-
чески и в одномерном случае совпадает с выражением, известным из нера-
венства Селберга. Для ковариационной матрицы общего вида решение по-
ставленной задачи сводится к определению корня скалярного уравнения.
57
Если смещение достаточно мало, то вероятностная граница совпадает с из-
вестной верхней оценкой из неравенства Маркова, т.е. суммой вторых момен-
тов, деленной на квадрат радиуса шара. Однако данная ситуация имеет место
при весьма ограничительных условиях, что наиболее четко проявляется при
сравнительно небольших дисперсиях. Поэтому более типичным оказывается
случай, в котором искомая вероятностная граница определяется новым вы-
ражением, дающим существенно меньшее значение в сравнении с границей
Маркова.
Полученные теоретические результаты подтверждены численными расче-
тами с использованием известного решения, основанного на технике линей-
ных матричных неравенств. Для найденной вероятностной границы пока-
зано, что она может быть значительно точнее, чем известные ранее верх-
ние оценки. Кроме того, приведены два примера ее использования: в за-
даче о гарантированной надежности доверительного эллипсоида и в зада-
че о проверке нормальной гипотезы против альтернативы с неопределенным
распределением.
ПРИЛОЖЕНИЕ
Доказательство леммы 1. Заметим сначала, что q(x|M) → ∞ при
∥x∥ → ∞ в силу Λ ≻ O. Поэтому в задаче (7) минимум достигается. Теперь
сделаем замену переменных u = x + µ:
qt(M) = min
{λ0 + 2 〈λ, u - µ〉 + 〈Λ (u - µ) , u - µ〉} =
u: ∥u∥≥t
= q (-µ|M) + min
{〈Λu, u〉 + 2〈ν, u〉} ,
u: ∥u∥≥t
где ν = λ - Λµ.
Если {uk} и {νk} координаты векторов u и ν в разложении по соб-
ственному ортонормированному базису матрицы Λ, а {ℓk} ее собственные
значения, то
∑(
)
∑(
)
〈Λu, u〉 + 2〈ν, u〉 =
ℓku2k + 2νkuk
≥
ℓku2k - 2|νk||uk|
,
k=1
k=1
где нижняя оценка получается при sign uk = -sign νk.
Воспользуемся равенством Парсеваля ∥u∥2 = u21 + . . . + u2n и сделаем за-
мену переменных p = col [p1, . . . , pn], pk = u2k. Тогда рассматриваемая задача
минимизации превращается в задачу выпуклого программирования
{
}
∑
∑
min
{〈Λu, u〉 + 2〈ν, u〉} = min
(ℓkpk - 2|νk|√pk) :
pk
≥t2
,
u: ∥u∥≥t
p≥0
k=1
k=1
58
к которой можно применить теорему Куна-Таккера о седловой точке:
min
{〈Λu, u〉 + 2〈ν, u〉} =
u: ∥u∥≥t
{
(
)}
∑
∑
= max
inf
(ℓkpk - 2|νk|√pk ) + c t2
- pk
c≥0
p≥0
k=1
k=1
Точная нижняя грань равна сумме t2c и n слагаемых следующего вида:
-ν2k/(ℓk - c), c < ℓk,
inf
{(ℓk - c)pk - 2|νk|√pk} =
0,
c = ℓk, νk = 0,
pk≥0
-∞,
c = ℓk, νk = 0 или c > ℓk.
Достаточно рассматривать только c < σΛ = min ℓk, а если максимум при-
ходится на c = σΛ, то это можно учесть с помощью взятия точной верхней
грани
{
}
∑
min
{〈Λu, u〉 + 2〈ν, u〉} = sup t2c -
ν2k/(ℓk - c)
u: ∥u∥≥t
0≤c<σΛ
k=1
После перехода к матричным обозначениям получаем (12), что и требова-
лось.
Доказательство леммы 2. В силу непрерывности функции
G(S) = tr [SR] + (S + γI)-1 b, b
ее точная нижняя грань на множестве {S : S ≻ O} будет такой же, как на за-
мкнутом множестве Rn×n+, на котором минимум достигается благодаря тому,
что G(S) → ∞ при tr S → ∞.
В силу гладкости необходимое условие минимума в точк
S имеет вид
[
]
tr
∇G
S)(S
S)
≥0
∀S≽O,
где ∇G(S) = R - (S + γI)-1bb∗(S + γI)-1 градиент. Если H любая сим-
метричная матрица с нормой меньше минимального положительного соб-
ственного значени
S, а
P ортопроектор на im
S], то S
S
P
P ≽O.
Поэтому необходимое условие приводит к равенств
P ∇G
S
P = O, т.е.
P
P
P (S + γI)-1bb∗(S + γI)-1
P.
Но в правой части стоит матрица ранга не выше единицы, а слева ранг мат-
рицы равен размерности im
S] в силу im[R] = Rn. Следовательно, искомая
матриц
S будет иметь ранг один (т.е
S = aa∗, a = 0) или будет нулевой.
Поэтому достаточно искать минимум функции
g(a) = G(aa∗) = 〈Ra, a〉 + 〈(aa∗ + γI)-1b, b〉, a ∈ Rn.
59
С помощью леммы об обращении матрицы
(
)
1
(aa∗ + γI)-1 = γ-1 I -
aa∗
∥a∥2 + γ
получим
2
∥b∥
〈a, b〉2
g(a) =
+ 〈Ra, a〉 -
γ
γ(∥a∥2 + γ)
и
∇g(a)
〈a, b〉b
〈a, b〉2a
= Ra -
+
2
γ(∥a∥2 + γ)
γ(∥a∥2 + γ)2
Равенство градиента нулю дает систему уравнений
√
2
〈a, b〉
a=
ξ/γ (R + ξ I)-1b,
ξ=
,
γ(∥a∥2 + γ)2
у которой есть тривиальное решение: a = 0, ξ = 0. Но если a = 0, то ξ > 0 и
второе уравнение оказывается замкнутым относительно этой переменной:
(R + ξ I)-1b, b = ξ (R + ξI)-2b,b +γ2,
что равносильно уравнению (15).
Левую часть (15) можно представить через собственные значения {rk}
матрицы R и координаты {bk} вектора b в собственном ортонормальном ба-
зисе:
∑
2
rkb
k
(rk + ξ)2
k=1
Следовательно, левая часть уравнения (15) является непрерывной убываю-
щей функцией, причем ее предельные значения при ξ ↓ 0 и ξ ↑ ∞ равны со-
ответственно 〈R-1b, b〉 и нулю. Поэтому в случае, когда правая часть урав-
нения (15) находится между этими значениями, решение ξ > 0 существует и
определено единственным способом.
Таким образом, если γ2 < 〈R-1b, b〉, то функция g(a) имеет две критиче-
ские точки: нулевую и найденную выше a = 0, причем
g(0) = ∥b∥2/γ > g(a) = (I - ξ2(R + ξ I)-2)b, b /γ.
Если же 〈R-1b, b〉 ≥ γ2, то уравнение (15) не имеет положительных решений,
поэтому ноль единственная критическая точка.
Итак, в обоих случаях получаем, что искомая нижняя грань определяется
выражением (14), что и требовалось доказать.
60
Доказательство леммы 3. Сделаем в (23) замену k = dξ/(1 + dξ),
которая является взаимно однозначной в силу того, что dξ убывает по ξ > 0.
Поэтому ограничение k ∈ (0, d0/(d0 + 1)) равносильно условию ξ ∈ (0, ∞).
С учетом (17) и (18) неравенство (23) преобразуется к виду
dξ
∥µ∥2 - ξ2〈(R + ξ I)-2µ, µ〉
tr R +
(∥µ∥2 - t2) +
≥0
dξ + 1
dξ + 1
или, что то же самое,
(dξ + 1)( tr R + ∥µ∥2) - dξt2 - ξ2〈(R + ξ I)-2µ, µ〉 ≥ 0.
C использованием обозначений (24) и η = t2 - ( tr R + ∥µ∥2) получим равно-
сильное неравенство
tr R + ∥µ∥2 ≥ (ηR + ξ2I)(R + ξ I)-2µ, µ ,
которое принимает вид G(ξ) ≤ p/(1 - p), где G(ξ)
левая часть уравне-
ния (25).
Предел G(ξ) при ξ ↑ ∞ равен ∥µ∥2/η, что меньше p/(1 - p). Предел G(ξ)
при ξ ↓ 0 равен d0, что больше p/(1 - p) тогда и только тогда, когда ограни-
чения (22) несовместны.
Рассмотрим этот случай. Тогда G(0) > p/(1 - p) > G(∞), что в силу глад-
кости G(ξ) позволяет утверждать, что уравнение (25) имеет решение на ин-
тервале (0, ∞).
Проверим, что оно будет единственным. Для этого вычислим производ-
ную:
D{
}
E
(
)
G′(ξ) =
2ξη-1(R + ξ I)-2 - 2
R+ξ2η-1I
(R + ξI)-3 µ,µ
=
(
)
=2
ξη-1 - 1
(R + ξ I)-3Rµ, µ ,
с помощью которой получаем, что левее точки η функция G(ξ) убывает,
а правее возрастает. Следовательно, G(η) < G(∞) < p/(1 - p), что с учетом
G(0) > p/(1 - p) позволяет утверждать, что точк
ξ, дающая решение уравне-
ния G(ξ) = p/(1 - p), принадлежит интервалу (0, η) и является единственной.
Отсюда следует {ξ > 0: G(ξ) ≤ p/(1 - p)} =
ξ,∞). Тогда множество ре-
шений неравенства (23) имеет вид (0,k], гдеk = dˆξ/(dˆξ + 1) в силу обратной
монотонности замены переменной.
Остается рассмотреть случай, когда ограничения (22) совместны. В этом
случае G(0) ≤ p/(1 - p), откуда G(ξ) ≤ p/(1 - p) для всех ξ > 0, что равно-
сильно тому, что неравенство (23) выполнено при любых k ∈ (0, d0/(d0 + 1)).
Лемма доказана.
Доказательство следствия. Заметим сначала
(
)
(
)2
p=
nσ2 + r2
/t2, d0 = r2/σ2, dξ = σ2r2/
σ2 + ξ
61
Достаточно разобрать только случай (i). Согласно (26) он реализуется при
p(σ2 + r2) < r2. При этом условии запишем уравнение (25)
(
)(
r2
σ2 + ξ2/η
σ2 + ξ
)-2 = p/(1 - p), 0 < ξ < η = t2(1 - p).
Перепишем его в виде r2((1 - p)σ2 + ξ2/t2) = p(σ2 + ξ)2 и преобразуем к квад-
ратному уравнению
(
)
n/t2
ξ2 + 2pξ + pσ2 - (1 - p)r2 = 0.
Его свободный коэффициент отрицателен по условию. Следовательно, оба
корня вещественные и разного знака. Тогда
√
ξ = t2(-p +
D/4)/n
искомый положительный корень, где
(
)(
)
D/4 = p2 -
n/t2
pσ2 - (1 - p)r2
=
(
)
=p2 -
p - r2/t2
p + (1 - p)nr2/t2 = (p + (1 - p)n)r2/t2,
откуда получаем
{
√
}
σ2 + ξ =
-r2 + rt
p + (1 - p)n
/n.
Теперь остается подставить это выражение в (26), (i):
1
1
pt(µ,σ2In) =
=
=
1 + 1/dξ
1 + (σ2 + ξ)2/(σ2r2)
1
=
{
}2
√
1+
-r + t
p + (1 - p)n
/(σ2n2)
Полученное выражение совпадает с (28), (i), что и требовалось доказать.
СПИСОК ЛИТЕРАТУРЫ
1. Lin F., Fang X., Gao Z. Distributionally robust optimization: A review on theory
and applications // Numerical Algebra, Control & Optimization. 2022. V. 12. No. 1.
P. 159-212.
2. Карлин С., Стадден В. Чебышевские системы и их применение в анализе и
статистике. М.: Наука, 1976.
3. Крейн М.Г., Нудельман А.А. Проблема моментов Маркова и экстремальные за-
дачи. М.: Наука, 1973.
4. Marshall A.W., Olkin I. Multivariate Chebyshev inequalities // Ann. Math. Stat.
1960. V. 31. No. 4. P. 1001-1014.
62
5.
El Ghaoui L., Oks M., Oustry F. Worst-case value-at-risk and robust portfolio op-
timization: A conic programming approach // Operations Research. 2003. V. 51.
No. 4. P. 543-556.
6.
Popescu I. Robust mean-covariance solutions for stochastic optimization and appli-
cations // Operations Research. 2007. V. 55. No. 1. P. 98-112.
7.
Панков А.Р., Семенихин К.В. О минимаксном оценивании по вероятностному
критерию // АиТ. 2007. № 3. С. 66-82.
Pankov A.R., Semenikhin K.V. Minimax Estimation by Probabilistic Criterion //
Autom. Remote Control. 2007. V. 68. No. 3. P. 430-445.
8.
Семенихин К.В. Минимаксность линейных оценок неопределенно-стохастиче-
ского вектора по обобщенным вероятностным критериям // АиТ. 2007. № 11.
С. 88-104.
Semenikhin K.V. Minimax Nature of the Linear Estimates of the Indefinite Stochas-
tic Vector from the Generalized Probabilistic Criteria // Autom. Remote Control.
2007. V. 68. No. 11. P. 1970-1985.
9.
Delage E., Ye Y. Distributionally robust optimization under moment uncertainty
with application to data-driven problems // Operations Research. 2010. V. 58.
P. 595-612.
10.
Zymler S., Kuhn D., Rustem B. Distributionally robust joint chance constraints with
second-order moment information // Math. Program. 2013. V. 137. P. 167-198.
11.
Kitahara T., Mizuno S., Nakata K. Quadratic and convex minimax classifica-
tion problems // J. Operations Research Society Of Japan. 2008. V. 51. No. 2.
P. 191-201.
12.
Stellato B., Van Parys B.P.G., Goulart P.J. Multivariate Chebyshev inequality
with estimated mean and variance // American Statistician. 2017. V. 71. No. 2.
P. 123-127.
13.
Vandenberghe L., Boyd S., Comanor K. Generalized Chebyshev bounds via semidef-
inite programming // SIAM Review. 2007. V. 49. No. 1. P. 52-64.
14.
Csiszar V., Fegyverneki T., Mori T.F. Explicit multivariate bounds of Chebyshev
type // Annales Univ. Sci. Budapest., Sect. Comp. 2014. V. 42. P. 109-125.
15.
Csiszar V., Mori T.F. A Bienaymé-Chebyshev inequality for scale mixtures of the
multivariate normal distribution // Math. Inequalities & Applications. 2009. V. 12.
No. 4. P. 839-844.
16.
Bertsimas D., Popescu I. Optimal inequalities in probability theory: A convex opti-
mization approach // SIAM J. Optimization. 2005. V. 15. No. 3. P. 780-804.
17.
Van Parys B.P.G., Goulart P.J., Kuhn D. Generalized Gauss Inequalities via
Semidefinite Programming // Math. Program. 2016. V. 156. P. 271-302.
18.
Barmish B.R., Lagoa C.M. The Uniform Distribution: A Rigorous Justification for
Its Use in Robustness Analysis // Math. Control Signal. Syst. 1997. V. 10. P. 203-222.
19.
Кибзун А.И. О наихудшем распределении в задачах стохастической оптимиза-
ции с функцией вероятности // АиТ. 1998. № 11. С. 104-116.
Kibzun A.I. On the Worst-Case Distribution in Stochastic Optimization Prob-
lems with Probability Function // Autom. Remote Control. 1998. V. 59. No. 11.
P. 1587-1597.
63
20. Кан Ю.С. Об обосновании принципа равномерности в задаче оптимизации ве-
роятностного показателя качества // АиТ. 2000. № 1. С. 54-70.
Kan Yu.S. On the Justification of the Uniformity Principle in the Optimization of
a Probability Performance Index // Autom. Remote Control. 2000. V. 61. No. 1.
P. 50-64.
21. Sturm J.F. Using SeDuMi 1.02, a MATLAB toolbox for optimization over symmetric
cones // Optimization Methods & Software. 1999. V. 11. No. 12. P. 625-653.
22. Grant M.C., Boyd S.P. The CVX Users’ Guide. Release 2.1. CVX Research, Inc.
23. Платонов Е.Н., Семенихин К.В. Методы синтеза минимаксных оценок при на-
личии поэлементных ограничений на ковариационную матрицу // АиТ. 2016.
№ 5. С. 82-108.
Platonov E.N., Semenikhin K.V. Methods for Minimax Estimation under Elemen-
twise Covariance Uncertainty // Autom. Remote Control. 2016. V. 77. No. 5.
P. 817-838.
24. Алберт А. Регрессия, псевдоинверсия и рекуррентное оценивание. М.: Наука,
1977.
25. Иоффе А.Д., Тихомиров В.М. Теория экстремальных задач. М.: Наука, 1974.
Статья представлена к публикации членом редколлегии А.И. Кибзуном.
Поступила в редакцию 03.02.2022
После доработки 17.03.2022
Принята к публикации 28.04.2022
64