Автоматика и телемеханика, № 8, 2022
Интеллектуальные системы управления,
анализ данных
© 2022 г. В.А. БУХАЛЁВ, д-р техн. наук (Vadim.Bukhalev@yandex.ru)
(Московский научно-исследовательский телевизионный институт),
А.А. СКРЫННИКОВ, канд. техн. наук (a1260@mail.ru)
(Государственный научно-исследовательский институт
авиационных систем, Москва;
Московский авиационный институт),
В.А. БОЛДИНОВ, канд. техн. наук (ViktorBoldinov@mail.ru)
(Московский авиационный институт)
АДАПТИВНОЕ РАСПОЗНАВАНИЕ МАРКОВСКОГО
ДВОИЧНОГО СИГНАЛА ЛИНЕЙНОЙ СИСТЕМЫ НА
ОСНОВЕ РАСПРЕДЕЛЕНИЯ ПИРСОНА I ТИПА1
Рассматривается задача нахождения закона распределения выходного
сигнала апериодического звена, на вход которого действует случайный
скачкообразный сигнал в виде марковской цепи с двумя состояниями.
Теоретически доказано, что плотность вероятности выходного сигнала
описывается распределением Пирсона I типа, что экспериментально под-
тверждается результатами математического моделирования. Полученные
результаты используются для синтеза алгоритма адаптивного распозна-
вания неизвестных вероятностей переходов марковской цепи.
Ключевые слова: распределение Пирсона I типа, случайная скачкообраз-
ная структура, марковский двоичный сигнал, адаптивный алгоритм, ве-
роятности переходов марковской цепи.
DOI: 10.31857/S0005231022080098, EDN: AHWVVL
1. Введение
Семейство распределений Пирсона часто используется в прикладных зада-
чах исследования стохастических динамических систем для аппроксимации
законов распределения фазовых координат [1-5].
Это объясняется широтой охвата реальных вероятностных распределений,
встречающихся на практике, разнообразием форм распределений Пирсона и
возможностью построения алгоритмов анализа и синтеза, сочетающих точ-
ность решения с простотой реализации.
В связи с этим возникает интерес, насколько аппроксимирующие распреде-
ления близки к реальным, которые можно найти в результате аналитических
1 Работа выполнена при финансовой поддержке Российского научного фонда (проект
№ 22-29-00708).
159
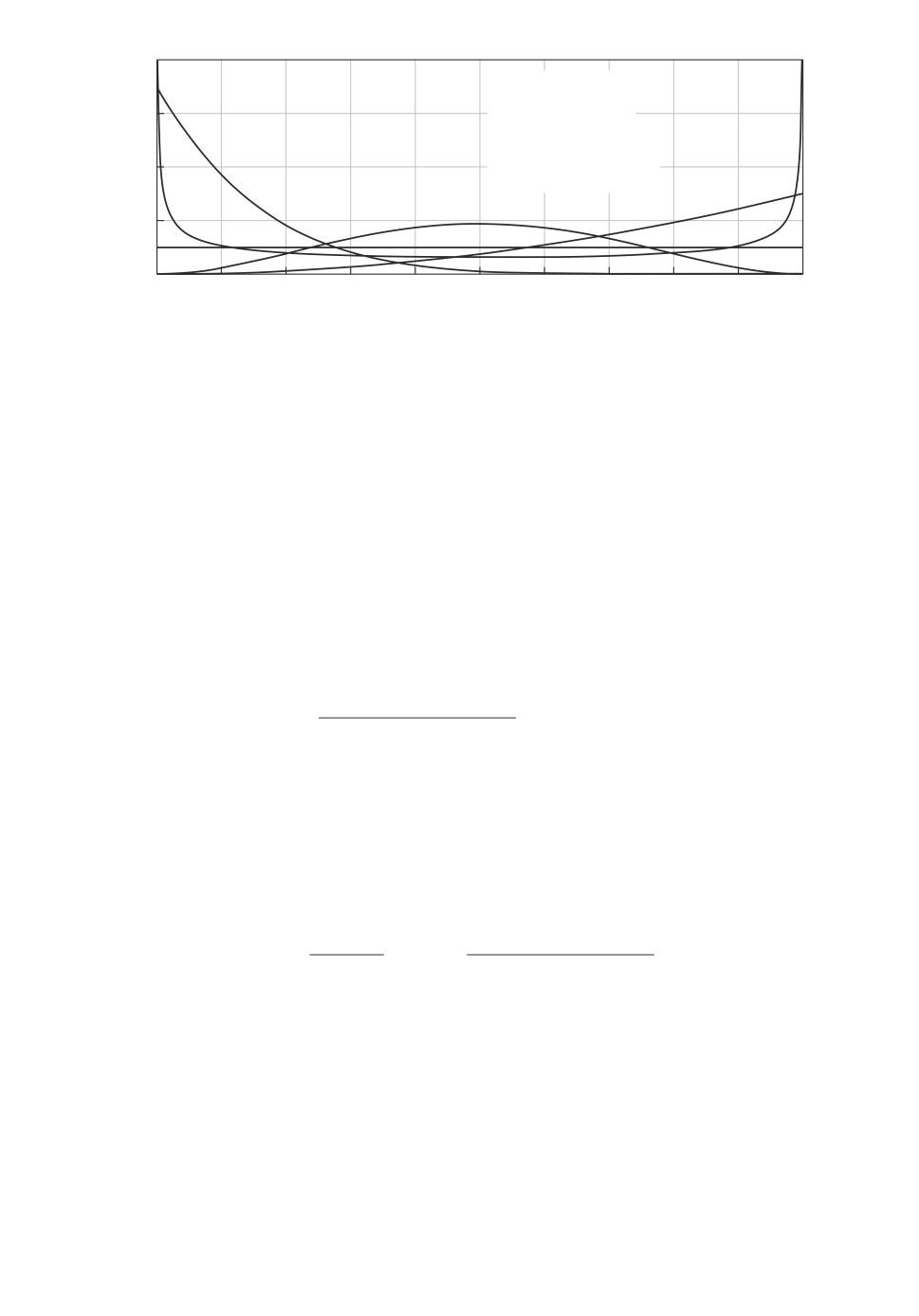
f(x)
1 - a = 1, b = 1;
3
2 - a = 1, b = 7;
2
3 - a = 3, b = 1;
4 - a = 0,5, b = 0,5;
2
5 - a = 3, b = 3
3
1
5
1
4
0
-1,0
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
x
Рис. 1. Плотность вероятности распределения Пирсона I типа при a = b = 1
и при различных значениях α, β.
решений некоторых типовых задач. Одна из таких задач рассматривается в
настоящей работе.
С ней связана вторая задача, решаемая в статье,
применение полу-
ченного распределения как аппроксимирующего для построения алгоритма
адаптивного распознавания неизвестных вероятностей переходов марковско-
го двоичного входного сигнала линейной системы.
Одним из наиболее эффективных с этой точки зрения является распреде-
ление Пирсона I типа, плотность вероятности которого описывается форму-
лой
(a + x)α-1(b - x)β-1
при x ∈ [-a, b];
f (x) =
(a + b)α+β-1B(α, β)
0
при x ∈ [-a, b],
где B(α, β) бета-функция, а математическое ожидание m и дисперсия D
случайной величины X связаны с параметрами распределения α, β простыми
алгебраическими формулами
bα - aβ
(a + b)2αβ
m=
,
D=
α+β
(α + β)2(α + β + 1)
Распределение Пирсона I типа обладает двумя практическими досто-
инствами: 1) жесткие ограничения по амплитуде сигналов в технических
устройствах определяют диапазон распределения [-a, b]; 2) форма кривой
распределения существенно изменяется в зависимости от сочетания парамет-
ров α, β (см. рис. 1).
Эти обстоятельства позволяют надеяться на успешное применение рас-
пределения Пирсона I типа в качестве аппроксимирующего и при решении
аналогичных задач для других инерционных систем.
160
2. Постановка задачи
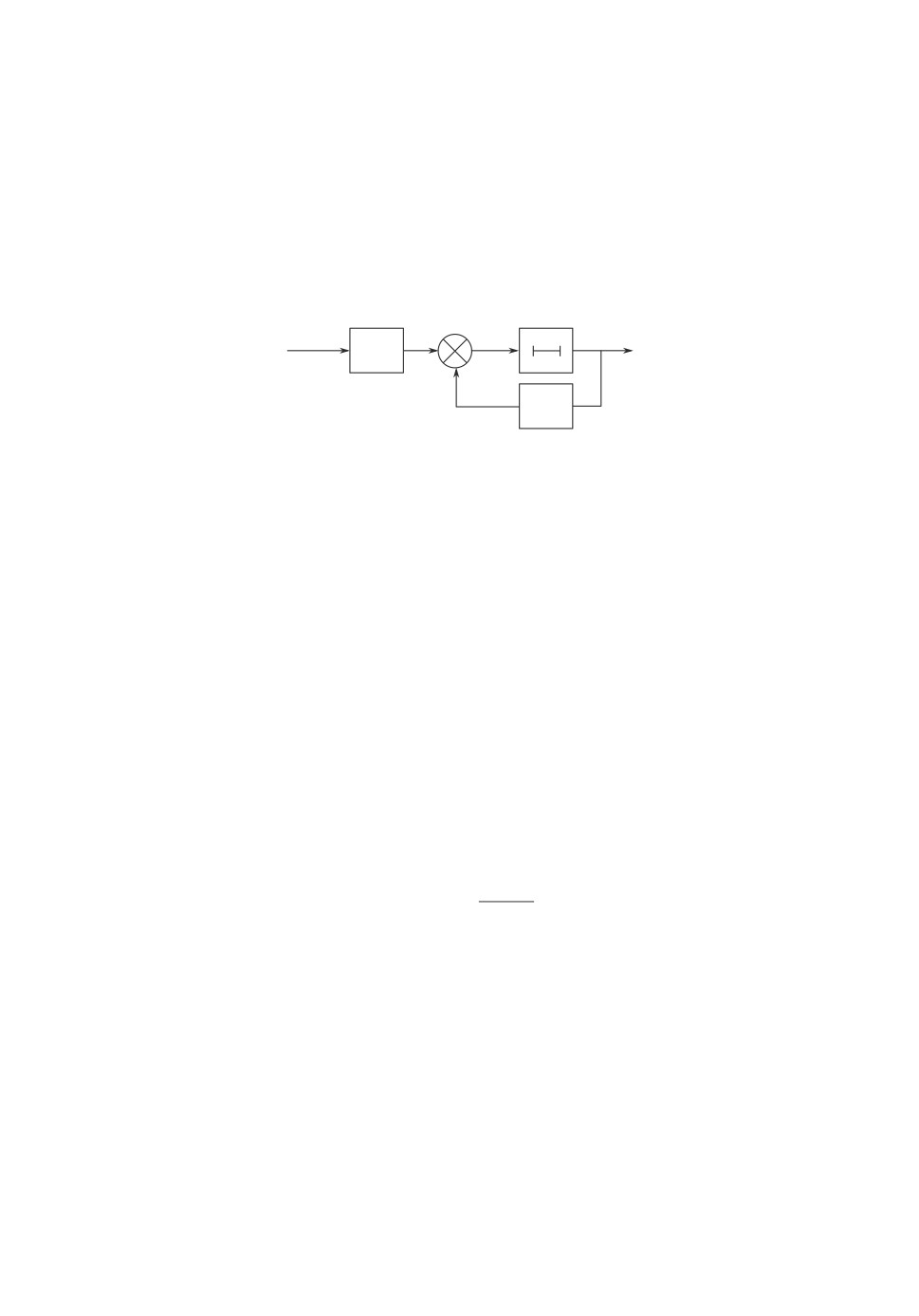
Рассмотрим систему, изображенную на рис. 2 и описываемую уравнением
(2.1)
xk+1 = lxk + (1 - l)u(sk
),
где sk марковская цепь с двумя состояниями: s = 1 и s = 2, заданная веро-
ятностями переходов h и g; h ∈ (0, 0,5), g ∈ (0, 0,5); u(sk) случайный дво-
ичный сигнал: u(1) = b, u(2) = -a, a > 0, b > 0; l коэффициент усиления,
l ∈ (0, 1).
uk(sk)
xk + 1
xk
1 - l
l
Рис. 2.
Требуется: 1) найти закон распределения выходного сигнала x(t) в устано-
вившемся режиме при известных вероятностях переходов h, g; 2) применить
полученное распределение для адаптивного распознавания неизвестных h, g
по измерениям xk.
3. Распределение выходного сигнала
Если изменения структуры представляют собой условно-марковскую цепь
с вероятностями переходов qk(sk+1|xk, sk), то на основании теории систем со
случайной скачкообразной структурой (ССС) [1-3, 5-9] закон распределения
(xk, sk) описывается уравнениями
∞
∫
∑
fk+1(xk+1,sk+1) =
fk+1(xk+1|xk,sk)qk(sk+1|xk,sk)fk(xk,sk)dxk,
(3.1)
sk -∞
sk = 1,n(s),
где qk(sk+1|xk, sk) условная вероятность перехода из sk в sk+1 при фикси-
рованном xk.
В частном случае, при sk = 1, 2 и условиях задачи п. 2, уравнения (3.1)
принимают вид
∫∞
(3.2)
fk+1(xk+1,1) =
fk+1(xk+1|xk,1)[(1 - h)fk(xk,1) + gfk(xk,2)] dxk,
-∞
∫∞
(3.3)
fk+1(xk+1,2) =
fk+1(xk+1|xk,2)[hfk(xk,1) + (1 - g)fk(xk,2)] dxk,
-∞
161
где
(3.4)
fk+1(xk+1|xk,1) = δ(xk+1 - lxk
− 1 + l),
(3.5)
fk+1(xk+1|xk,2) = δ(xk+1 - lxk
+ 1 - l),
δ(·)
дельта-функция Дирака.
При k → ∞ (установившийся режим) уравнения (3.2)-(3.5) преобразуются
к непрерывной форме:
∂f(x,1)
l(x - b)
+ (l - h)f(x, 1) + gf(x, 2) = 0;
∂x
(3.6)
∂f(x,2)
l(x + b)
+ (l - g)f(x, 2) + hf(x, 1) = 0.
∂x
Исключая из системы уравнений переменную f(x, 2) и используя под-
становку y = (x + a)/(a - b), получаем гипергеометрическое уравнение Гаус-
са [10]
∂2f(y,1)
∂f(y,1)
y(y - 1)
+ [(3 - α - β)y + α - 1]
+
(3.7)
∂y2
∂y
+ (1 - α - β)f(y, 1) = 0,
где
g
h
(3.8)
α≜
,
β≜
1-l
1-l
Уравнение (3.7) эквивалентно уравнению с разделяющимися переменными
[10]
∂f(y,1)
(3.9)
y(y - 1)
+ [(1 - α - β)y + α] f(y, 1) = 0.
∂y
Аналогично получаем уравнение для f(x, 2)
∂f(y,2)
(3.10)
y(y - 1)
+ [(1 - α - β)y + α - 1] f(y,2) = 0.
∂y
Решая эти уравнения, получаем
(3.11)
f (y, 1) = C1yα(1 - y)β-1, f(y, 2) = C2yα-1(1 - y)β.
Произвольные постоянные определяются из условия нормировки
∫
1
∫
1
(3.12)
f (y, 1)dy = p(1),
f (y, 2)dy = p(2).
0
0
162
Вероятности состояний структуры pk+1(1), pk+1(2) определяются форму-
лами
∫∞
pk+1(1) =
fk+1(xk+1,1)dxk+1,
(3.13)
-∞
pk+1(2) = 1 - pk+1(1),
откуда согласно (3.2), (3.3) следует
(3.14)
pk+1(1) = (1 - h - g)pk
(1) + g.
В установившемся режиме (при k → ∞) из (3.14) получаем
g
h
(3.15)
p(1) =
,
p(2) =
h+g
h+g
Подставив
(3.11),
(3.15) в
(3.9),
(3.10), производя обратную заме-
ну x = (a + b)y - a и учитывая соотношения f(x, 1) = p(1)f(x|1), f(x, 2) =
= p(2)f(x|2), находим установившиеся условные плотности вероятностей
f (x|1), f(x|2) и безусловную плотность вероятности f(x):
при x ∈ [-a, b]
β-1
(a + x)α(b - x)
(3.16)
f (x|1) =
,
(a + b)α+β B(α + 1, β)
β
(a + x)α-1(b - x)
(3.17)
f (x|2) =
,
(a + b)α+β B(α, β + 1)
β-1
(a + x)α-1(b - x)
(3.18)
f (x) =
,
(a + b)α+β-1B(α, β)
при x ∈ [-a, b]
(3.19)
f (x|1) = f(x|2) = f(x) = 0,
где B(α, β) бета-функция; α > 0, β > 0.
Таким образом, условные и безусловные распределения выходного сигнала
в установившемся режиме являются распределениями Пирсона I типа [4, 5].
В частном случае при a = b = 1:
при x ∈ [-1, 1]
β-1
(1 + x)α(1 - x)
(3.20)
f (x|1) =
,
2α+βB(α + 1, β)
β
(1 + x)α-1(1 - x)
(3.21)
f (x|2) =
,
2α+βB(α, β + 1)
β-1
(1 + x)α-1(1 - x)
(3.22)
f (x) =
,
2α+β-1B(α, β)
163
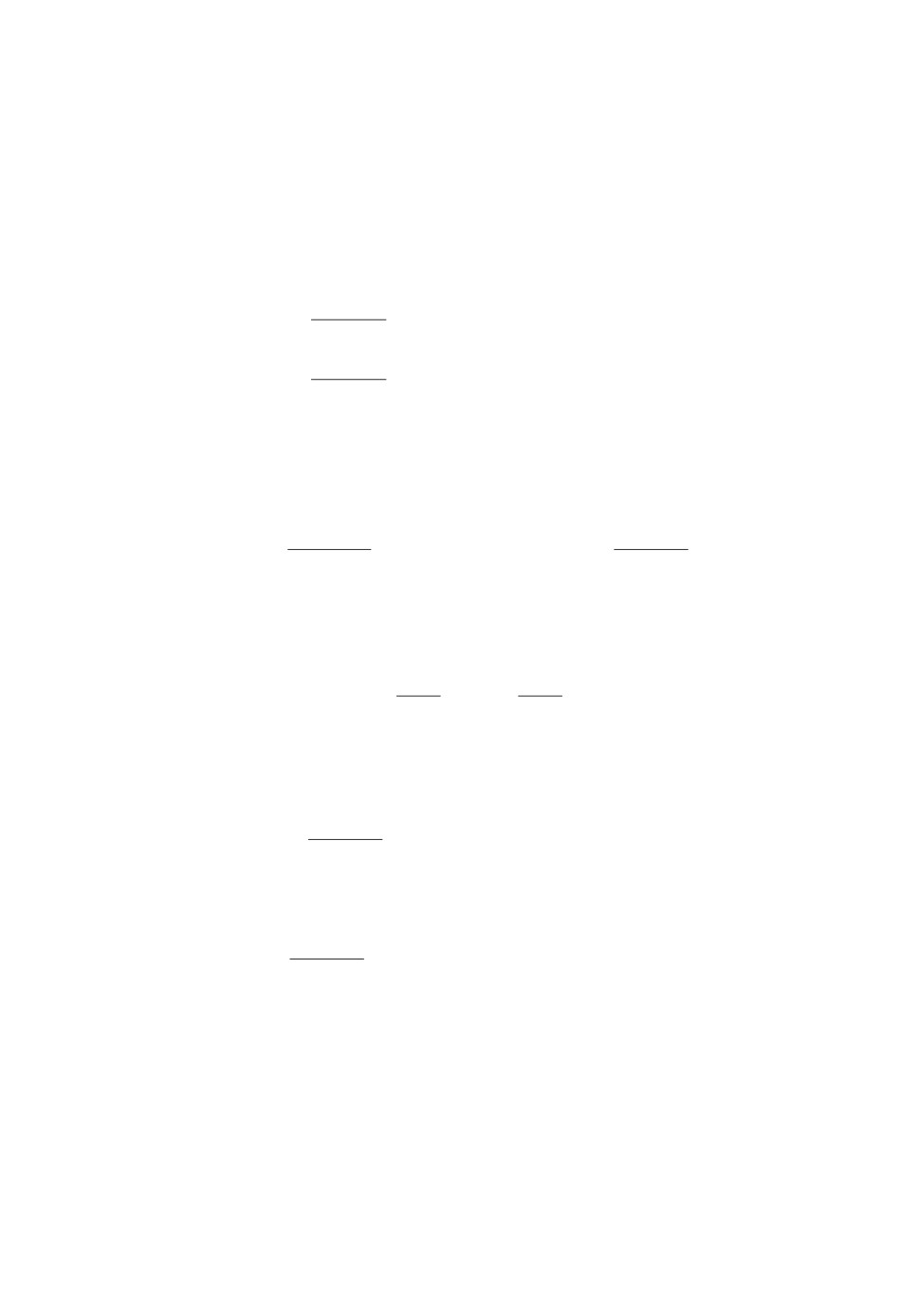
F *(x)
F(x)
1,0
0,9
0,8
0,7
0,6
0,5
0,4
F(x)
0,3
F *(x)
0,2
0,1
0
-1,0
-0,8
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
x
Рис. 3.
при x ∈ [-1, 1]
(3.23)
f (x|1) = f(x|2) = f(x) = 0.
В частном случае при b = 1, a = 0 распределения (3.19) являются бета-
распределениями: [4, 5]
при x ∈ [0, 1]
β-1
xα(1 - x)
(3.24)
f (x|1) =
,
B(α + 1, β)
β
xα-1(1 - x)
(3.25)
f (x|2) =
,
B(α, β + 1)
β-1
xα-1(1 - x)
(3.26)
f (x) =
,
B(α, β)
при x ∈ [0, 1]
(3.27)
f (x|1) = f(x|2) = f(x) = 0.
Как следует из формул (3.8), (3.19), параметры α, β характеризуют отно-
шение частотного спектра случайного двоичного входного сигнала к полосе
пропускания апериодического звена и сдвиг распределения выходного сигнала
в сторону одной из границ: b или (-a).
Пример. Результаты моделирования выходного сигнала x(t) по формуле
(2.1) c заданными вероятностями переходов h = 0,1Δt и g = 0,2Δt и коэффи-
циенте усиления l = 0,1Δt, где Δt шаг счета, при a = b = 1 показывают,
164
что с увеличением длительности наблюдения экспериментальная функция
распределения F∗(x) случайной величины X сходится к теоретической F (x)
(см. рис. 3). Выражение функции распределения при таких значениях пара-
метров модели может быть получено аналитически, для этого с использовани-
ем выражений (3.8) вычисляются значения параметров закона распределения
α = 1,0, β = 2,0, тогда плотность распределения (3.22) будет иметь вид
x+1
f (x) =
,
2
что дает выражение для функции распределения
x2 + 2x + 1
F (x) =
4
Сходимость экспериментальной функции распределения фазовой коорди-
наты x(t) к теоретической функции распределения подтверждается при лю-
бых значениях параметров модели.
4. Адаптивное распознавание неизвестных вероятностей скачков
случайного двоичного входного сигнала
Дополним систему, изображенную на рис. 2, измерителем выходного сиг-
нала, описываемым в дискретной форме
(4.1)
zk = xk + ζk,
где ζk последовательность случайных величин, независимых при разных k
и распределенных в диапазоне [-1, 1] с плотностью вероятности Пирсона I
типа
3(1 - ζ2k)
(4.2)
fζ(ζk) =
4
Входной сигнал uk(sk) ∈ [-1, 1]. В отличие от постановки задачи в разде-
ле 2 вероятности перехода h и g марковской цепи uk(sk) неизвестны, и их
необходимо найти, используя измерения zk.
1. Приближенную связь апостериорных оценок xk,Rk с прогнозируемыми
xk,
Rk и измерением zk, применяя байесовскую обработку информации и
линейную регрессию коррелированных случайных величин xk и zk, можно
представить в виде следующих формул [2]:
[
]
xz
R
(4.3)
xk+1 ≈
x+
(z - z)
,
Rz
k+1
[
]
2
(4.4)
Rk+1 ≈
R+(Rxz)
,
Rz
k+1
165
где
[
]
[
]
xk+1 ≜ M xk+1|z0,k+1 ,
xk+1 ≜ M xk+1|z0,k ,
[
]
[
]
Rk+1 ≜ M (xk+1 - xk+1)2|z0,k+1 ,
Rk+1 ≜ M (xk+1 - xk+1)2|z0,k ,
[
]
Rxz
≜ M (xk+1 - xk+1)(zk+1 - zk+1)|z0,k ,
k+1
[
]
Rz
k+1
≜ M (zk+1 - zk+1)2|z0,k ;
[
]
(4.5)
xk+1 = lx + (1 - l)û
,
k
[
]
(4.6)
Rk+1 = l2 R + (1 - l)2 Ĝ
,
k
где
ûk ≜ M[uk(sk)|z0,k],
Ĝk ≜ M[(uk(sk) - ûk)2|z0,k-1].
Rz
2. Согласно (4.1), (4.2)Rxzk,
определяются формулами
k
Rxz
Rz
(4.7)
k
= Rk,
k
= Rk + Q,
zk = xk,
где Qk дисперсия помехи ζk.
Подставив (4.7) в (4.3)-(4.6), получаем
[
]
[
]
lxk + (1 - l)ûk Q + l2 Rk + (1 - l)2 Ĝk zk+1
(4.8)
xk+1 =
,
l2 Rk + (1 - l)2 Ĝk + Q
[
]
l2 Rk + (1 - l)2 Ĝk Q
(4.9)
Rk+1 =
,
l2 Rk + (1 - l)2 Ĝk + Q
x0 = x0,
R0 = R0, Q = 0,2,
где x0, R0 известные величины.
3. Математическое ожидание и дисперсия входного сигнала uk(sk), рас-
пределенного по закону Бернулли, определяются формулами
(4.10)
ûk = pk(1) - pk(2),
Ĝk = 4pk(1)pk(2).
Вероятности pk(1), pk(1) состояний структуры sk = 1, 2 марковской цепи в
установившемся режиме согласно (3.15) определяются формулами
g
h
(4.11)
p(1) =
,
p(2) =
h+g
h+g
166
При неизвестных h и g эти вероятности корректируются на основании
измерений z0,k и приближенно могут быть определены формулами
ĥk
ĝk
(4.12)
pk(1) =
,
pk(2) =
ĥk + ĝk
ĥk + ĝk
Учитывая связь (3.8) вероятностей перехода h, g с параметрами распреде-
ления Пирсона I типа, получаем из (4.10)
αk
βk
(4.13)
pk(1) =
,
pk(2) =
,
αk
βk
αk
βk
гдеĥk, ĝk, αk
βk оценки соответствующих параметров h, g, α, β, получен-
ные на основании измерений z0,k.
4. Математическое ожидание x и дисперсия R распределения Пирсона I ти-
па в диапазоне x ∈ [-1, 1] связаны с парметрами распределения α, β форму-
лами [4, 5]
α-β
4αβ
(4.14)
x=
,
R=
,
α+β
(α + β)2(α + β + 1)
откуда следует
2
(1 + x)γ
(1 - x)γ
1-x
(4.15)
α=
,
β=
,
γ =
− 1,
2
2
R
2
(1 + x)γ
(1 - x)γ
1-x
(4.16)
α=
,
β=
,
γ=
− 1.
2
2
R
Подставив (4.13) в (4.10), получаем
αk
βk
4αk
βk
(4.17)
ûk =
= xk,
Ĝk =
=1-x2.
αk
βk
(αk
βk)2
Подставив (4.17) в (4.8), (4.9), получаем
[
]
) zk+1
Qxk + l2 Rk + (1 - l)2(1 - x2k
(4.18)
xk+1 =
,
l2 Rk + (1 - l)2(1 - x2k) + Q
[
]
) Q
l2 Rk + (1 - l)2(1 - x2k
(4.19)
Rk+1 =
l2 Rk + (1 - l)2(1 - x2k) + Q
Согласно (2.1), (3.8)
(4.20)
ĝk = αk(1 - l),
ĥk
βk
(1 - l).
Таким образом, алгоритм адаптивного распознавания неизвестных веро-
ятностей перехода h и g марковского двоичного входного сигнала uk(sk),
sk = 1,2 с параметрами uk(1) = 1, uk(2) = -1 описывается замкнутой систе-
мой уравнений (4.18)-(4.20), входом которой является измерение zk, а выхо-
дом оценкиĥk, ĝk.
167
5. Заключение
В результате решения задачи нахождения закона распределения сигнала
на выходе апериодического звена, на вход которого действует случайный дво-
ичный сигнал, вероятности переходов которого из одного состояния в другое
описываются марковской цепью, получена плотность вероятности выходного
сигнала.
Задача решена методами теории систем со случайной скачкообразной
структурой [1-3]. Найденная плотность вероятности является распределени-
ем Пирсона I типа, которое широко используется в прикладных задачах ана-
лиза и синтеза стохастичеких динамических систем [4, 5]. Полученное анали-
тическое решение подтверждено результатами математического моделирова-
ния.
Полученные результаты используются для построения алгоритма адап-
тивного распознавания неизвестных вероятностей переходов на основании
неточных измерений выходного сигнала системы.
СПИСОК ЛИТЕРАТУРЫ
1. Бухалёв В.А. Распознавание, оценивание и управление в системах со случайной
скачкообразной структурой. М.: Наука, 1996.
2. Бухалёв В.А. Оптимальное сглаживание в системах со случайной скачкообраз-
ной структурой. М.: Физматлит, 2013.
3. Бухалёв В.А., Скрынников А.А., Болдинов В.А. Игровое управление системами
со случайной скачкообразной структурой. М.: ФИЗМАТЛИТ, 2021.
4. Справочник по теории вероятностей и математической статистике. Под редак-
цией В.С. Королюка. М.: Наука, 1985.
5. Джонсон Н.Л., Коц С., Балакришнан Н. Одномерные непрерывные распреде-
ления. В двух частях. Ч.2. М.: Бином. Лаборатория знаний, 2012.
6. Piers B.D., Sworder D.D. Bayes and Minimax Controllers for a Linear Systems for
Stochastic Jump Parameters // IEEE Trans. Autom. Control. 1971. V. 16. No. 4.
P. 677-685.
7. Moon J. A Sufficient Condition for Linear-Quadratic Stochastic Zero-Sum Differen-
tial Games for Markov Jump Systems // IEEE Trans. Autom. Control. 2019. V. 64.
No. 4. P. 1619-1626.
8. Mariton M. Jump Linear Systems in Automatic Control. Taylor & Francis, 1990.
9. Sworder D.D. Feedback Control of a Class of Linear Systems with Jump Parame-
ters // IEEE Trans. Autom. Control. 1969. V. 14. No. 1. P. 9-14.
10. Камке Э. Справочник по обыкновенным дифференциальным уравнениям. М.:
ФИЗМАТЛИТ, 1976.
Статья представлена к публикации членом редколлегии Б.М. Миллером.
Поступила в редакцию 14.11.2021
После доработки 16.02.2022
Принята к публикации 31.03.2022
168