Автоматика и телемеханика, № 9, 2022
Нелинейные системы
© 2022 г. А.Н. ЖИРАБОК, д-р техн. наук (zhirabok@mail.ru),
А.В. ЗУЕВ, канд. техн. наук (zuev@dvo.ru)
(Дальневосточный федеральный университет, Владивосток;
Институт проблем морских технологий ДВО РАН, Владивосток),
В.Ф. ФИЛАРЕТОВ, д-р техн. наук (filaretov@inbox.ru)
(Институт автоматики и процессов управления ДВО РАН,
Владивосток),
А.Е. ШУМСКИЙ, д-р техн. наук (a.e.shumsky@yandex.con),
КИМ ЧХУН ИР (kim.ci@dvfu.ru)
(Дальневосточный федеральный университет, Владивосток)
КАНОНИЧЕСКАЯ ФОРМА ЖОРДАНА В ЗАДАЧАХ
ДИАГНОСТИРОВАНИЯ И ОЦЕНИВАНИЯ1
Предлагается метод решения задач диагностирования и оценивания
на основе канонической формы Жордана. Рассматриваются задачи по-
строения диагностических наблюдателей, виртуальных датчиков, а также
интервальных и скользящих наблюдателей. Алгоритмы решения указан-
ных задач предназначены как для линейных, так и нелинейных систем
при наличии внешних возмущений и шумов измерений. Показано, что
использование канонической формы Жордана позволяет в ряде случаев
уменьшить сложность наблюдателей и датчиков и упростить процедуру
их синтеза по сравнению с идентификационной канонической формой.
Изложенное иллюстрируется практическим примером.
Ключевые слова: динамические системы, каноническая форма Жордана,
дефекты, диагностирование, оценивание.
DOI: 10.31857/S0005231022090021, EDN: AILGQC
1. Введение и постановка задачи
Различные канонические формы (КФ) динамических систем играют важ-
ную роль в решении многих задач теории и практики, см., например, [1-3].
Они позволяют существенно упростить решение многих задач и получить
простые алгоритмы их решения, что существенно для реализации этих ал-
горитмов средствами вычислительной техники. В частности, в задачах диаг-
ностирования и оценивания активно используется идентификационная КФ
(ИКФ) [1, 4], позволяющая получить простые процедуры синтеза соответ-
ствующих наблюдателей. При этом устойчивость наблюдателя обеспечивает-
ся за счет обратной связи по сигналу невязки.
1 Работа поддержана Российским научным фондом (проект № 22-29-01303).
36
Последние годы для решения задач построения так называемых интер-
вальных наблюдателей стала активно применяться КФ Жордана [5, 6], ко-
торая ранее использовалась при анализе свойства самокоррекции сбоев [7].
Матрица, описывающая динамику системы и реализованная в жордановой
КФ, при соответствующем выборе собственных чисел обеспечивает устойчи-
вость наблюдателя и является метцлеровой, т.е. ее внедиагональные элемен-
ты неотрицательны. Эти свойства позволяют гарантировать, что интерваль-
ный наблюдатель в каждый момент времени вырабатывает оценку множества
допустимых значений вектора состояния системы с неопределенностями.
Анализ жордановой КФ показал, что помимо гарантии устойчивости она
позволяет упростить процедуру обеспечения нечувствительности наблюдате-
ля к возмущениям и в ряде случаев уменьшить его размерность за счет отсут-
ствия необходимости обеспечивать устойчивость специальными средствами.
В работе разрабатываются методы применения этой КФ для решения за-
дач построения диагностических и скользящих наблюдателей, виртуальных
датчиков, а также интервальных наблюдателей в постановке более общей,
нежели в [5, 6]. Указанные задачи решаются для класса систем, описывае-
мых нелинейной моделью
x(t) = F x(t) + Gu(t) + CΨ(x(t), u(t)) + Dd(t) + Lρ(t),
(1.1)
y(t) = Hx(t) + w(t),
где x ∈ Rn, u ∈ Rm, y ∈ Rl
векторы состояния, управления и выхода;
F и G постоянные матрицы, описывающие линейную динамику; H, C, L и
D известные постоянные матрицы, d(t) скалярная функция, описываю-
щая дефекты: если они отсутствуют, то d(t) = 0, при их появлении d(t) ста-
новится неизвестной ограниченной функцией времени, ∥d(t)∥ ≤ d∗; ρ(t) ∈ Rp
описывает возмущения, действующие на систему, предполагается, что ρ(t)
неизвестная ограниченная функция времени, ∥ρ(t)∥ ≤ ρ∗; w(t) ∈ Rl неиз-
вестная ограниченная функция времени, описывающая шумы измерений,
∥w(t)∥ ≤ w∗; Ψ(x, u) нелинейная составляющая, представленная в виде
ϕ1(A1x,u)
Ψ(x, u) =
,
ϕq(Aqx, u)
A1,... ,Aq
известные постоянные матрицы-строки, ϕ1, . . . , ϕq
нелиней-
ные функции, возможно, недифференцируемые. Предполагается, что функ-
ция CΨ(x, u) удовлетворяет условию Липшица по аргументу x:
(
)
(1.2)
C
Ψ(x, u) - Ψ(x′, u)
≤ N∥x - x′
∥,
где N > 0.
Влияния параметрических неопределенностей в статье не рассматривает-
ся, это предмет отдельного исследования. Остановимся вначале на классе
линейных систем, когда C = 0.
37
2. Построение диагностического наблюдателя
В основе решения всех рассматриваемых задач лежит модель систе-
мы (1.1) минимальной размерности, нечувствительная к возмущению, кото-
рая при отсутствии дефектов, шумов и возмущений описывается уравнением
x∗(t) = F∗x∗(t) + G∗u(t) + J∗y(t),
(2.1)
y∗(t) = H∗x∗(t),
где x∗(t) ∈ Rk, k < n размерность модели, y∗ ∈ R, F∗, G∗, J∗, H∗ матри-
цы, подлежащие определению. При решении задачи диагностирования будем
предполагать, что w(t) = 0; присутствие в измерениях шумов может быть
учтено использованием адаптивного порога независимо от вида применяемой
КФ, поэтому в работе этот вопрос не обсуждается.
Будем полагать, что при отсутствии дефектов, шумов и возмущений спра-
ведливы равенства x∗(t) = Φx(t) и y∗(t) = R∗y(t), где Φ и R∗ некоторые
постоянные матрицы. Известно [8], что они удовлетворяют условиям
(2.2)
ΦF = F∗Φ + J∗H, R∗H = H∗Φ, ΦG = G∗.
Критерии разрешимости этих уравнений приведены в [8].
Задача диагностирования включает в себя три подзадачи: обнаружение де-
фекта, поиск дефекта и его идентификация. Диагностический наблюдатель
решает первую задачу путем формирования невязки r(t) = R∗y(t) - y∗(t),
равной нулю при отсутствии дефектов и возмущений; при появлении дефек-
тов невязка становится отличной от нуля. Ниже решается задача обнаруже-
ния, идентификации посвящен раздел 5.
Для построения модели (2.1) матрицы F∗ и H∗ традиционно ищутся в
ИКФ:
0
1
0
0
0
0
1
0
F∗ =
H∗ = ( 1 0
0
0 ).
,
0
0
0
0
Это позволяет получить простые уравнения для определения матриц,
описывающих модель (2.1) [1, 8], и обеспечить устойчивость наблюдате-
ля путем введения обратной связи по сигналу невязки r(t) с матрицей
K = (k1 k2 ... kk)T, задавая собственные числа λ1 ,λ2 ,... ,λk, которые бу-
дем полагать разными и отрицательными.
В отличие от этого, в работе предлагается искать матрицу F∗ в КФ Жор-
дана, имеющую диагональный вид
λ1
0
0
0
0
λ2
0
0
(2.3)
F∗ =
.
0
0
0
... λk
38
В принципе к такому виду модель, реализованная в ИКФ с обратной свя-
зью K, может быть приведена преобразованием подобия, матрица которого
может быть составлена из собственных векторов матрицы F∗ - KH∗. Извест-
но, что преобразование подобия сохраняет собственные числа [9], поэтому
полученный наблюдатель будет характеризоваться матрицей (2.3).
Предлагается обойтись без преобразования подобия, а сразу задавать мат-
рицу F∗ в жордановой форме (2.3). Уравнение ΦF = F∗Φ + J∗H в этом случае
распадается на k независимых уравнений:
(2.4)
ΦiF = λiΦi + J∗i
H, i = 1,2,... ,k,
где Φi и J∗i
i-е строки матриц Φ и J∗ соответственно. Дополнительное
требование ΦiL = 0 нечувствительность к возмущениям учитывается
следующим образом. Введем матрицу L0 максимального ранга, такую, что
L0L = 0, тогда Φ = SL0 для некоторой матрицы S. В результате уравнение
(2.4) может быть записано в виде
(
)
L0(F - λiIn)
(2.5)
(Si
-J∗i)
= 0, i = 1, 2, . . . , k,
H
где In единичная n × n-матрица, Si i-я строка матрицы S. Это уравнение
разрешимо, если
)
( L0(F - λIn)
rank
< rank(L0(F - λIn)) + rank(H).
H
Матрицы R∗ и H∗ определяются из уравнения R∗H = H∗Φ, записанного в
виде
(
)
H
(2.6)
(R∗
-H∗)
= 0,
Φ
которое разрешимо, когда выполняется ранговое неравенство
(
)
Φ
(2.7)
rank
< rank(Φ) + rank(H).
H
Задавая конкретные значения λi < 0, из уравнения (2.5) необходимо,
прежде всего, найти такую строку Φ1 = S1L0 матрицы Φ, для которой выпол-
няется условие чувствительности к дефекту Φ1D = 0. Затем найти минималь-
ное число строк Φi, для которых вместе с Φ1 выполняется условие (2.7), при
этом удаление каждой такой строки из проверки (2.7) нарушает это условие.
Матрицы J∗, R∗ и H∗ определяются из (2.5) и (2.6) соответственно. Вычис-
лением матрицы G∗ = ΦG заканчивается процесс построения наблюдателя,
обладающего требуемыми показателями переходного процесса.
39
Замечание 1. Скалярный характер функции d(t) соответствует одно-
кратным дефектам, которые являются наиболее вероятными. Дефекты крат-
ности s могут быть описаны векторной функцией d(t) ∈ Rs и (n × s)-матри-
цей D. В этом случае правило решения уравнения (2.5) модифицируется сле-
дующим образом: “Задавая конкретные значения λi < 0, из уравнения (2.5)
необходимо найти такие строки Φ1, . . . , Φc матрицы Φ, что для каждого столб-
ца D(i) матрицы D найдется строка Φj с условием Φj D(i) = 0. Затем найти
минимальное число строк Φz, для которых вместе с Φ1, . . . , Φc выполняется
условие (2.7).”
Замечание 2. Если уравнение (2.5) или (2.6) не имеет решений, наблю-
датель, не чувствительный к возмущениям, не может быть построен, в этом
случае необходимо обратиться к робастным методам, описанным в разделе 7.
3. Построение виртуального датчика
Одним из препятствий на пути реализации методов диагностирования мо-
жет быть недостаточное число датчиков, которыми оснащена диагностируе-
мая система. Введение дополнительных датчиков приводит к дополнитель-
ным затратам и не всегда реализуемо на практике. Более перспективным
является использование так называемых виртуальных датчиков [10, 11], ко-
торые строятся на основе наблюдателей Люенбергера и в работах [10, 11]
имеют размерность, совпадающую с размерностью исходной системы. Сле-
дует отметить, что виртуальные датчики широко используются при решении
различных практических задач [12-14].
В [15] задача построения виртуальных датчиков минимальной размерно-
сти, оценивающих заданные компоненты вектора состояния нелинейной си-
стемы, была решена на основе ИКФ. Решение задачи осуществлялось в три
этапа: на первом строилась линейная модель, не чувствительная к возмуще-
ниям, далее проверялась возможность оценки заданных компонент, на по-
следнем этапе обеспечивалась устойчивость наблюдателя.
Дальнейшего уменьшения размерности (по сравнению с достигнутой на ос-
нове ИКФ) можно добиться за счет использования жордановой КФ, автома-
тически обеспечивающей устойчивость. Предполагая, что w(t) = 0 и d(t) = 0,
рассмотрим более общую задачу оценки переменной z(t) = Mx(t) для за-
данной матрицы M, которую можно рассматривать как задачу построения
виртуального датчика, формирующего переменную z(t). Такой датчик зада-
ется в виде
x∗(t) = F∗x∗(t) + G∗u(t) + J∗y(t),
(3.1)
z(t) = Hzx∗(t) + Qy(t)
в предположении, что ΦL = 0, где Hz и Q матрицы, подлежащие опреде-
лению. Из z(t) = Mx(t) и (3.1) следует Mx(t) = Hzx∗(t) + Qy(t), или
(
)
Φ
M = HzΦ + QH = (Hz Q)
H
40
Это уравнение имеет решение, если
(
)
Φ
Φ
(3.2)
rank
= rank H
.
H
M
Значения λi < 0 в уравнении (2.5) должны задаваться так, чтобы полу-
ченная в результате его решения матрица Φ с минимальным числом строк
удовлетворяла условию (3.2), после чего определяются матрицы Hz и Q. По-
строение виртуального датчика, обладающего требуемыми показателями пе-
реходного процесса, завершается определением матрицы G∗ = ΦG.
Замечание 3. Если w(t) = 0, точность оценивания уменьшается. В этом
случае, а также когда решение уравнения (2.5) не удовлетворяет условию
(3.2), верхнюю и нижнюю границы, в пределах которых могут находить-
ся значения переменной z(t), устанавливаются интервальным наблюдателем,
рассматриваемым ниже.
4. Построение интервального наблюдателя
В этом разделе решается задача построения интервальных наблюдателей
для динамических систем с неопределенностями, описываемых линейными
моделями, позволяющих оценить множество допустимых значений заданной
линейной функции z(t) = Mx(t). Отметим, что методы построения таких на-
блюдателей разработаны для широкого класса систем [16, 17]; обстоятельные
обзоры по интервальным наблюдателям содержатся в [5, 18]. Из сказанного
выше следует, что такие наблюдатели можно рассматривать как обобщение
виртуальных датчиков, когда w(t) = 0 или ΦL = 0.
Требуется построить интервальный наблюдатель минимальной размер-
ности, формирующий нижнюю z(t) и верхнюю z(t) границы переменной
z(t) = Mx(t), для которых справедливо неравенство z(t) ≤ z(t) ≤ z(t) при
всех t ≥ 0 и условии x0 ≤ x(0) ≤ x0 для некоторых x0 и x0. Здесь по ана-
логии с [5] для произвольных векторов x(1), x(2) и k × k-матриц S(1), S(2)
отношения x(1) ≤ x(2) и S(1) ≤ S(2) понимаются поэлементно. В [6] для интер-
вальной оценки вектора x(t) было предложено предварительно построенный
устойчивый наблюдатель преобразовать к жордановой КФ. В отличие от это-
го, матрица F∗ сразу ищется в указанной форме.
Уравнение (2.5) в этом случае упрощается:
(
)
F -λiIn
(4.1)
(Φi
-J∗i)
= 0, i = 1, 2, . . . , k,
H
что предусматривает случай ΦL = 0, и модель (3.1) принимает вид
x∗(t) = F∗x∗(t) + G∗u(t) + J∗Hx(t) + L∗ρ(t),
(4.2)
z(t) = Hzx∗(t) + Qy(t),
где L∗ = ΦL.
41
Интервальный наблюдатель ищется в виде
x∗(t) = F∗x∗(t) + G∗u(t) + J∗y(t) - |J∗|Ekw∗ - |L∗|Ekρ∗,
x∗(t) = F∗x∗(t) + G∗u(t) + J∗y(t) + |J∗|Ekw∗ + |L∗|Ekρ∗,
(4.3)
z(t) = Hzx∗(t) + Qy(t),
z(t) = Hzx∗(t) + Qy(t),
x∗(0) = x∗0, x∗(0) = x∗0,
где по предположению x∗0 ≤ x∗(0) ≤ x∗0, матрица |A| состоит из абсолют-
ных значений соответствующих элементов матрицы A, Ek k × 1-матрица,
составленная из единиц.
Допущение. Все элементы матрицы Hz положительны, т.е. Hz ≥ 0.
Теорема 1. Пусть Hz ≥ 0 и x∗(0) ≤ x∗(0) ≤ x∗(0), тогда для интер-
вального наблюдателя (4.3) выполняется соотношение z(t) ≤ z(t) ≤ z(t).
Доказательство. По аналогии с [5] введем ошибки оценивания
e∗(t) = x∗(t) - x∗(t), e∗(t) = x∗(t) - x∗(t),
(4.4)
ez(t) = z(t) - z(t),
ez(t) = z(t) - z(t).
Из x∗(0) ≤ x∗(0) ≤ x∗(0) с очевидностью следует e∗(0) ≥ 0 и e∗(0) ≥ 0. С уче-
том (4.2) и (4.3) для ошибок оценивания получаем дифференциальные урав-
нения:
ė∗(t) = F∗e∗(t) + J∗(Hx(t) - y(t)) + L∗ρ(t) + |J∗|Ekw∗ + |L∗|Ekρ∗ =
= F∗e∗(t) - J∗w(t) + L∗ρ(t) + |J∗|Ekw∗ + |L∗|Ekρ∗,
(4.5)
ė∗(t) = F∗e∗(t) - J∗(Hx(t) - y(t)) - L∗ρ(t) + |J∗|Ekw∗ + |L∗|Ekρ∗ =
= F∗e∗(t) + J∗w(t) - L∗ρ(t) + |J∗|Ekw∗ + |L∗|Ekρ∗.
Отметим, что в (4.5) ±J∗w(t) + |J∗|Ekw∗ ≥ 0 и ±L∗ρ(t) + |L∗|Ekρ∗ ≥ 0 при
всех t ≥ 0 и внедиагональные элементы матрицы F∗ неотрицательны; та-
кая система называется монотонной, или неотрицательной [5]. Ее решения
при e∗(0) ≥ 0, e∗(0) ≥ 0 будут поэлементно неотрицательными, т.е. e∗(t) ≥ 0,
e∗(t) ≥ 0 для всех t ≥ 0 [5], откуда согласно (4.4) следует x∗(t) ≤ x∗(t) ≤ x∗(t).
Так как z(t) = Hzx∗(t) + Qy(t), то из (4.4) имеем
ez(t) = Hzx∗(t) + Qy(t) - (Hzx∗(t) + Qy(t)) = Hze∗(t),
ez(t) = Hzx∗(t) + Qy(t) - (Hzx∗(t) + Qy(t)) = Hze∗(t),
откуда с учетом e∗(t) ≥ 0, e∗(t) ≥ 0 и допущения Hz ≥ 0 получаем ez(t) ≥ 0,
ez(t) ≥ 0, что эквивалентно доказываемому утверждению. Теорема доказана.
Таким образом, для построения интервального наблюдателя, оцениваю-
щего переменную z(t) = Mx(t), необходимо найти такие решения уравне-
ния (4.1), которые при минимальном k дают матрицу Φ, удовлетворяющую
условию (3.2), и вычислить матрицы J∗, G∗ и L∗.
42
Замечание 4. Как следует из (4.3), величина интервала (z(t),z(t)) за-
висит от амплитуды возмущения и уровня шумов. С целью уменьшения этой
величины матрицы Φ и J∗ следует определять из уравнения (2.5), которое
гарантирует L∗ = 0, или использовать робастное решение (см. раздел 7). Рас-
полагая найденными значениями z(t) и z(t), можно найти оценку перемен-
ной z(t) в виде z(t) = 0,5(z(t) + z(t)).
Предложенный подход к получению интервальной оценки заданной пере-
менной z(t) = Mx(t) в ряде случаев может быть применен к аналогичной
оценке всего вектора состояния x(t) следующим образом. Не уменьшая сте-
пени общности, примем, что матрица H имеет максимальный ранг и
)
(1)
( x
H = (H0 0), y(t) = H0x(1)(t) + w(t), x =
,
x(2)
H0
невырожденная матрица. Определим
y(t) = y(t) - Elw∗, y(t) = y(t) + Elw∗,
(4.6)
x(1)(t) = H-10y(t), x(1)(t) = H-10y(t).
Тогда
e(1)(t) = x(1)(t) - x(1)(t) = H-10(y(t) - w(t)) - H-10y(t) = H-10(Elw∗ - w(t)),
e(1)(t) = x(1)(t) - x(1)(t) = H-10y(t) - H-10(y(t) - w(t)) = H-10(Elw∗ + w(t)).
Полагая, что H-10 ≥ 0, из Elw∗ ± w(t) ≥ 0 получаем e(1)(t) ≥ 0 и e(1)(t) ≥ 0,
откуда следует x(1)(t) ≤ x(1)(t) ≤ x(1)(t).
Таким образом, переменная x(1)(t) при условии H-10 ≥ 0 оценивается на ос-
нове (4.6), переменная x(2)(t) может быть интервально оценена наблюдателем
вида (4.3), при этом возмущение ρ(t) на оценку (4.6) влияния не оказывает.
Замечание 5. Условие H-10 ≥ 0 с очевидностью выполняется в практи-
чески важных случаях, когда компоненты вектора x(1)(t) измеряются отдель-
ными датчиками и H0 = H-10 = Il.
5. Построение скользящего наблюдателя
Известно, что скользящие наблюдатели позволяют решить задачу иден-
тификации дефектов и вектора состояния в динамических системах. Мето-
ды построения таких наблюдателей рассмотрены в [19-27] для различных
классов систем, а также для отказоустойчивого управления [28]. Во многих
указанных работах для возможности построения скользящих наблюдателей
на исходную систему накладываются различные ограничения, в частности,
требуется, чтобы она была минимально фазовой или детектируемой и долж-
но выполняться условие согласования. Наиболее слабые условия получены
43
в [29] на основе редуцированной (меньшей размерности) модели исходной си-
стемы, имеющей различную чувствительность к дефектам и возмущениям,
и реализованной в виде ИКФ, за счет которой обеспечивается устойчивость.
Предлагаемое ниже решение является развитием подхода [29] применительно
к жордановой КФ; положим вначале, что w(t) = 0.
В [21] и аналогичных работах скользящий наблюдатель представляет со-
бой композицию двух подсистем со следующими свойствами: функции d(t)
и ρ(t) входят только в одну подсистему, выход y(t) совпадает с вектором со-
стояния этой подсистемы, при этом вторая подсистема является устойчивой.
Поскольку в жордановой КФ одномерные подсистемы независимы друг от
друга, скользящий наблюдатель на ее основе будет также одномерным. Для
его построения в уравнении (2.5) необходимо найти такое значение λ1 < 0 и
строку Φ1 = S1L0, для которой выполняются условия Φ1 = R∗H для некото-
рой матрицы R∗ и Φ1D = 0. Отметим, что это условия эквивалентны требо-
ванию согласования в виде rank (HD) = rank (D) [21].
Модель тогда будет описываться уравнениями
x∗(t) = λ1x∗(t) + G∗u(t) + J∗y(t) + D∗d(t),
(5.1)
y∗(t) = x∗1(t),
где x∗ = Φ1x. Скользящий наблюдатель ищется в виде
x∗(t) = λ1x∗(t) + G∗u(t) + J∗y(t) - k1v(t),
(5.2)
ŷ∗(t) = x∗(t),
где v(t) = sign(e(t)), k1 > 0, e(t) = x∗(t) - x∗(t).
Ошибка оценивания e(t) с учетом (5.1) и (5.2) описывается уравнением
(5.3)
ė(t) = λ1e(t) - k1v(t) - D∗
d(t).
Так как d(t) и v(t) ограниченные функции и ∥v(t)∥ = 1, то
∥D∗d(t) + k1v(t)∥ ≤ g0
для некоторого g0. Известно тогда, что ошибка e(t) ограничена и ∥e(t)∥ ≤ δ
для некоторого δ > 0.
Теорема 2. Наблюдатель (5.2) оценивает функцию d(t) в виде
(5.4)
d(t) = -k1D-1∗veq
(t),
где veq(t)
сигнал, представляющий среднее поведение разрывной функ-
ции v(t). По аналогии с [21] в качестве veq(t) используется функция
e(t)
veq(t) =
,
|e(t)| + ε
где ε малое положительное число.
44
Доказательство. Покажем, что при соответствующем выборе коэф-
фициента k1 получаем e = 0 за конечное время, т.е. достигается скользящий
режим. Рассмотрим функцию Ляпунова V = e2 и найдем ее производную,
используя (5.3):
V
= 2e ė = 2e(λ1e - k1v - D∗d).
Так как v = sign(e), то ek1v = k1|e| и
V
≤ 2|e|(-k1 + λ1δ + d∗∥D∗∥).
Если k1 удовлетворяет условию
(5.5)
k1 > λ1δ + d∗∥D∗
∥,
V
то
< 0, и достигается скользящий режим, т.е. e = ė = 0 за конечное вре-
мя. Из (5.3) с учетом скользящего режима получаем оценку (5.4). Теорема
доказана.
Замечание 6. Согласно [26] необходимым и достаточным условием по-
падания системы на поверхность скольжения и возникновения скользящего
режима за конечное время является отрицательность действительных частей
корней ее характеристического уравнения, а поскольку λ1 < 0, это условие с
очевидностью выполняется. Удержание системы на этой поверхности обеспе-
чивается условиемV < 0 [19], которое гарантируется условием (5.5).
В случае, когда в измерениях присутствует шум w(t) = 0, главный ре-
зультат остается прежним, но требование к величине коэффициента k1 уже-
сточается. В этом случае по аналогии с (4.5) уравнения (5.3) для ошибки
оценивания e(t) дополняется слагаемым J∗w(t)
(5.6)
ė(t) = λ1e(t) - k1v(t) - D∗d(t) + J∗
w(t).
В результате в производной функции ЛяпуноваV появляются дополнитель-
ный член
V
≤ 2|e|(-k1 + λ1δ + d∗∥D∗∥ + w∗∥J∗∥)
и требование к коэффициенту k1 ужесточается
k1 > λ1δ + d∗∥D∗∥ + w∗∥J∗∥.
Присутствие в (5.6) шумов приводит к тому, что оценка (5.4) дефекта стано-
вится приближенной
d(t) ≈ -k1D-1∗veq(t).
45
6. Нелинейные системы
Если исходная система нелинейна с C = 0, к правой части модели (2.1)
добавляется нелинейная составляющая
ϕi1(A∗1,i1x∗ + A∗2,i1y,u)
,
(6.1)
C∗Ψ∗(x∗,y,u) =
ϕik (A∗1,ik x∗ + A∗2,ik y, u)
где A∗1,i1 , A∗2,i1 , . . . , A∗1,ik , A∗2,ik
матрицы, подлежащие определению,
C∗ = ΦC; через C∗Ψ∗ обозначена функция C∗Ψ, в которой вектор x заменен
на x∗ и y на основе соотношения Aix = A∗1,ix∗ + A∗2,iy, i = i1, . . . , ik. Функ-
ции ϕj это функции из множества {ϕi} раздела 1, номера j = i1, . . . , ik
совпадают с номерами ненулевыми столбцов матрицы C∗.
Уравнения (2.2) дополняются соотношениями
(
)
Φ
(6.2)
ΦC = C∗, Ai = (A∗1,i A∗2,i)
,
i=i1,...,ik.
H
Второе из них выполняется, если
(
)
Φ
Φ
(6.3)
rank
= rank H
,i=i1,... ,ik.
H
Ai
Для построения нелинейной составляющей модели найдем из (2.5) мини-
мальное число строк матрицы Φ, положим C∗ := ΦC, найдем произведение
C∗Ψ(x,u) и с учетом (6.1) проверим условие (6.3). При его выполнении из (6.2)
определяются матрицы A∗1i и A∗2i, i = i1, . . . , ik. Если (6.3) несправедливо,
находится другое решение уравнения (2.5); возможно, для этого потребуется
увеличить значение k. Если увеличение размерности не приводит к результа-
ту, то не чувствительной к возмущениям модели не существует. В таких слу-
чаях можно использовать робастный подход, обеспечивающий минимальную
чувствительность к возмущениям, детально рассмотренный в [30] и коротко
изложенный в разделе 7.
Одна из главных проблем здесь обеспечение устойчивости наблюдате-
ля, соответствующие методы предложены, в частности, в [3]. Для конкрет-
ности рассмотрим только один случай, когда добавление нелинейной состав-
ляющей не сказывается на устойчивости, обеспечиваемой жордановой мат-
рицей F∗. Введем ошибку e∗(t) = Φx(t) - x∗(t) и детально рассмотрим слу-
чай, когда функция Ψ содержит одну нелинейность ϕ(Ax, u), которую с уче-
том (6.2) можно записать в виде ϕ(Ax, u) = ϕ(A∗1Φx + A∗2y, u). Тогда из
(1.1) и модели (2.1) с добавленной к ней нелинейной составляющей (6.1) при
Ψ(x, u) = ϕ(Ax, u) следует
ė∗ = F∗e∗ + C∗ϕ(Ax,u) - C∗ϕ(A∗1x∗ + A∗2y,u) =
= F∗e∗ + C∗ϕ(A∗1Φx + A∗2y,u) - C∗ϕ(A∗1x∗ + A∗2y,u).
46
Так как функция CΨ(x, u) = Cϕ(A∗1Φx + A∗2y, u) удовлетворяет условию
(1.2), то и C∗ϕ(Ax, y, u) удовлетворяет этому же условию:
∥C∗(ϕ(Ax, u) - ϕ(A∗1x∗ + A∗2y, u))∥ ≤ N∗∥e∗∥,
где N∗ > 0. Очевидно, что этот результат может быть распространен на слу-
чай произвольной функции Ψ.
Из устойчивости матрицы F∗ следует, что существуют симметрические
положительно-определенные матрицы P∗ и W∗ такие, что FT∗ P∗ + P∗F∗ =
= -W∗. В [3] рассмотрена функция Ляпунова V (t) = eT∗ (t)P∗e∗(t) и показано,
чтоV (t) < 0, т.е. наблюдатель устойчив, если
2N∗λmax(P∗) < λmin(W∗),
где λmax(P∗) и λmin(W∗) максимальное и минимальное собственные числа
матриц P∗ и W∗ соответственно. Это условие является достаточно консерва-
тивным, ему удовлетворяет небольшое число функций.
Рассмотренное требование устойчивости характерно для нелинейного ди-
агностического наблюдателя и виртуального датчика. В случае скользяще-
го наблюдателя нелинейная составляющая учитывается теми же методами,
что и шумы измерений, с учетом условия (1.2); покажем это. Обозначив
ΔΨ = Ψ∗(x∗,y,u) - Ψ∗(x∗,y,u), по аналогии можно получить
(6.4)
∥C∗(Ψ∗(x∗, y, u) - Ψ∗(x∗, y, u))∥ = ∥C∗ΔΨ∥ ≤ N∗
∥e∥,
e = x∗ - x∗, N∗ > 0.
С учетом нелинейных членов уравнения (5.3) для ошибки оценивания e(t)
дополняется слагаемым C∗ΔΨ:
ė(t) = λ1e(t) - k1v(t) - D∗d(t) + J∗w(t) + C∗ΔΨ.
В результате в производной функции ЛяпуноваV появляется дополнитель-
ный член, обусловленный неравенством (6.4):
V
≤ 2|e|(-k1 + λ1δ + d∗∥D∗∥ + w∗∥J∗∥ + δN∗)
и требование к коэффициенту k1 ужесточается:
k1 > λ1δ + d∗∥D∗∥ + w∗∥J∗∥ + δN∗.
Для интервального наблюдателя требование устойчивости сохраняется и
добавляется новое функция C∗Ψ∗(x∗, y, u) должна быть монотонной по пе-
ременной x∗ в смысле введенного выше отношения “≤”:
x∗ ≤ x′∗ ⇒ C∗Ψ∗(x∗,y,u) ≤ C∗Ψ∗(x′∗,y,u).
Это необходимо для доказательства того, что e∗(t) ≥ 0, e∗(t) ≥ 0 для всех
t ≥ 0.
Поскольку в общем случае переменная y(t), подверженная шумам изме-
рений, входит в нелинейную составляющую, в правые части уравнения (4.3)
дополнительно к члену ±|J∗|Ekw∗ добавится слагаемое ±k∗w∗, где коэффи-
циент k∗ может быть подобран в процессе моделирования.
47
7. Робастное решение
Если уравнение (2.5) не имеет решений или условие (2.7) ((3.2) для за-
дач построения виртуальных датчиков и интервальных наблюдателей) не
выполняется, то модель, не чувствительная к возмущениям, не может быть
построена, в этом случае необходимо обратиться к робастным методам. При-
менительно к ИКФ наиболее популярный из них детально описан в [30]. Он
сводится к минимизации нормы Фробениуса ∥ΦL∥F , описывающей вклад воз-
мущения в невязку, и реализуется на основе сингулярного разложения неко-
торой матрицы, включающей в себя описание модели и возмущения; детали
можно найти в [30].
При использовании жордановой КФ этот подход не может быть применен,
поскольку строки матрицы Φ, определяемые из уравнения (4.1), независимы
друг от друга. При решении задач построения диагностических наблюдате-
лей из уравнения (4.1) необходимо найти минимальное число строк Φi и J∗i,
i = 1,2,...,k, матриц Φ и J∗ соответственно, таких, чтобы удовлетворялось
условие (2.7) и хотя бы для одной строки Φi выполнялось ΦiD = 0 условие
чувствительности к дефекту. Подбирать их следует так, чтобы при наличии
нескольких вариантов выбор делался исходя из минимизации нормы ∥ΦiL∥F .
Для построения виртуальных датчиков и интервальных наблюдателей тре-
бований меньше должно выполняться только условие (3.2).
Таким образом, простота учета требования нечувствительности к возму-
щениям в виде условия (2.5) для жордановой КФ оборачивается более слож-
ной процедурой минимизации вклада возмущения в модель, когда условие
ΦL = 0 не выполняется. Более того, жорданова КФ ограничивает возможно-
сти такой минимизации. Анализ показывает, что в этом случае предпочти-
тельнее использовать ИКФ ценой некоторого увеличения размерности моде-
ли (2.1), что позволяет более эффективно минимизировать вклад возмущения
в модель. Сказанное не касается задачи построения интервальных наблюда-
телей, поскольку здесь реализация модели в ИКФ и последующее ее пре-
образование к жордановой КФ может заметно увеличить величину вклада
возмущения.
8. Практический пример
Рассмотрим нелинейную систему
x1 = a1u1/ϑ1 - a2a4
√x1 - x2,
x2 = a3u2/ϑ2 + a2a4
√x1 - x2 - a5√x2 - x3 + ρ1,
(8.1)
x3 = a5
√x2 - x3 - a6√x3 - ϑ7 + ρ2,
y1 = x2 + w1, y2 = x3 + w2,
где a4 = ϑ4
√2ϑ8/ϑ1, a5 = ϑ5√2ϑ8/ϑ2, и a6 = ϑ6√2ϑ8/ϑ3. Приведенные урав-
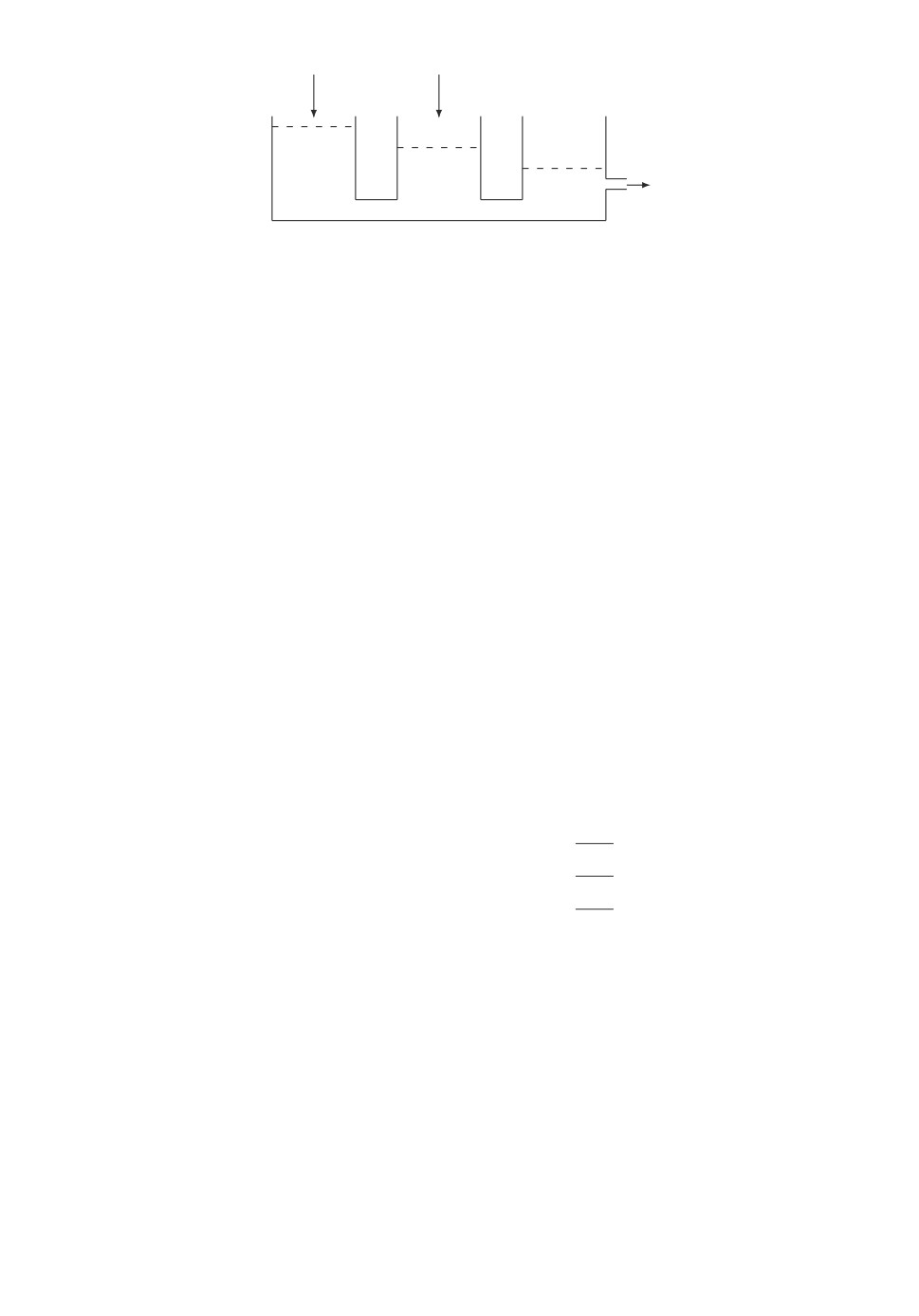
нения описывают известную трехтанковую систему (рис. 1), где x1, x2, x3
48
u1
u2
Рис. 1. Трехтанковая система.
уровни жидкости в танках. Система состоит из трех танков сечением ϑ1,
ϑ2 и ϑ3 соответственно. Танки соединяются трубами с сечениями ϑ4 и ϑ5.
Жидкость втекает в первый и второй танки и вытекает из третьего по тру-
бе сечения ϑ6, расположенной на высоте ϑ7; ϑ8
гравитационная посто-
янная. Уровни жидкости в танках x1, x2 и x3 соответственно. Для про-
стоты примем a1 = a2 = . . . = a6 = 1, ϑ7 = 0; |ρ1| ≤ ρ∗1, |ρ2| ≤ ρ∗2, |w1| ≤ w∗1,
|w2| ≤ w∗2. Начальные условия и управление предполагаются таковыми, что
x1(t) ≥ x2(t) ≥ x3(t) ≥ 0 при всех t ≥ 0.
Ясно, что F = 0 для (8.1), и непосредственно применить рассмотренный
подход невозможно. Для преодоления этой трудности преобразуем (8.1) вве-
дением формальных членов -(x1 - x2) + (x1 - x2), ((x1 - x2) - (x2 - x3))-
-((x1 - x2) - (x2 - x3)) и (x2 - x3 - x3) - (x2 - x3 - x3) в первое, второе и
третье уравнения соответственно. Слагаемое -(x1 - x2) добавляется к ли-
нейной части, (x1 - x2) к нелинейной; остальные члены рассматривают-
ся аналогично. В результате система описывается следующими матрицами и
нелинейностями:
-1
1
0
1
0
( 0 1 0)
F =
1
-2
1
, G=
0 1
, H =
,
0
0
1
0
1
-2
0
0
1
0
0
-√A1x + A1x
C =
-1
1
0
, Ψ(x) =
-√A2x + A2x
,
√
0
-1 1
-
A3x + A3x
A1 = (1
- 1 0), A2 = (0 1
- 1), A3 = (0 0 1).
Построим виртуальный датчик на основе жордановой КФ, оценивающий
переменную z(t) = x1(t). В этом случае
M = (1 0 0), L0 = (1 0 0).
Уравнение (2.5) принимает вид
-1 - λi
1
0
(Si
-J∗i)
0
1
0
= 0.
0
0
1
49
5,0
4,5
x1(t)
z(t)
4,0
3,5
3,0
2,5
2,0
1,5
1,0
0
5
10
15
20
t, с
Рис. 2. Графики функций x1(t) и z(t).
Примем λ = -1, тогда S = J∗ = (1 0), что дает Φ = (1 0 0) и G∗ = (1 0).
Нетрудно проверить, что условие (3.2) выполняется и Hz = 1, Q = 0. Далее
получаем C∗ = ΦC = (1 0 0); условие (6.3) выполняется и уравнение (6.2)
дает A∗1 = (1 -1 0). После упрощений виртуальный датчик (3.1) принимает
вид
√
x∗(t) = u1(t) -
x∗(t) - y1(t),
z(t) = x∗(t).
Хотя корень не является липшицевой функцией, обратную связь, описанную
в разделе 6, можно не вводить, поскольку система (8.1) с очевидностью устой-
чива и построенный датчик также устойчив.
Моделирование производилось при u1(t) = 1, t ≥ 1, u2(t) = 0,5, t ≥ 5;
ρ1(t) = -0,3, t ≥ 6, ρ2(t) = -0,4, t ≥ 10; шумы w1(t) и w2(t) принимались
равными нулю. Результаты моделирования представлены на рис. 2, где пред-
ставлены графики функций x1(t) и z(t).
Напомним, что в [15] виртуальный датчик для системы (8.1) был построен
на основе ИКФ при ρ1 = 0 и он имел размерность 2. Можно показать, что
в случае ρ1 = 0 такой датчик будет чувствителен к возмущению ρ1. Этот
пример демонстрирует явное преимущество жордановой КФ как в смысле
уменьшения размерности датчика, так и с точки зрения чувствительности к
возмущению.
В случае, когда присутствуют шумы w1(t) и w2(t), предпочтительным яв-
ляется интервальный наблюдатель. Построим его для оценки вектора состоя-
ния x(t) при ρ2 = 0. Из результатов раздела 4 следует, что можно принять
x(1) = (x2,x3)T , x(2) = x1. Поскольку H0 = I2, получаем
x2(t) = y1(t) - w∗1(t), x2(t) = y1(t) + w∗1(t),
x3(t) = y2(t) - w∗2(t), x3(t) = y2(t) + w∗2(t).
50
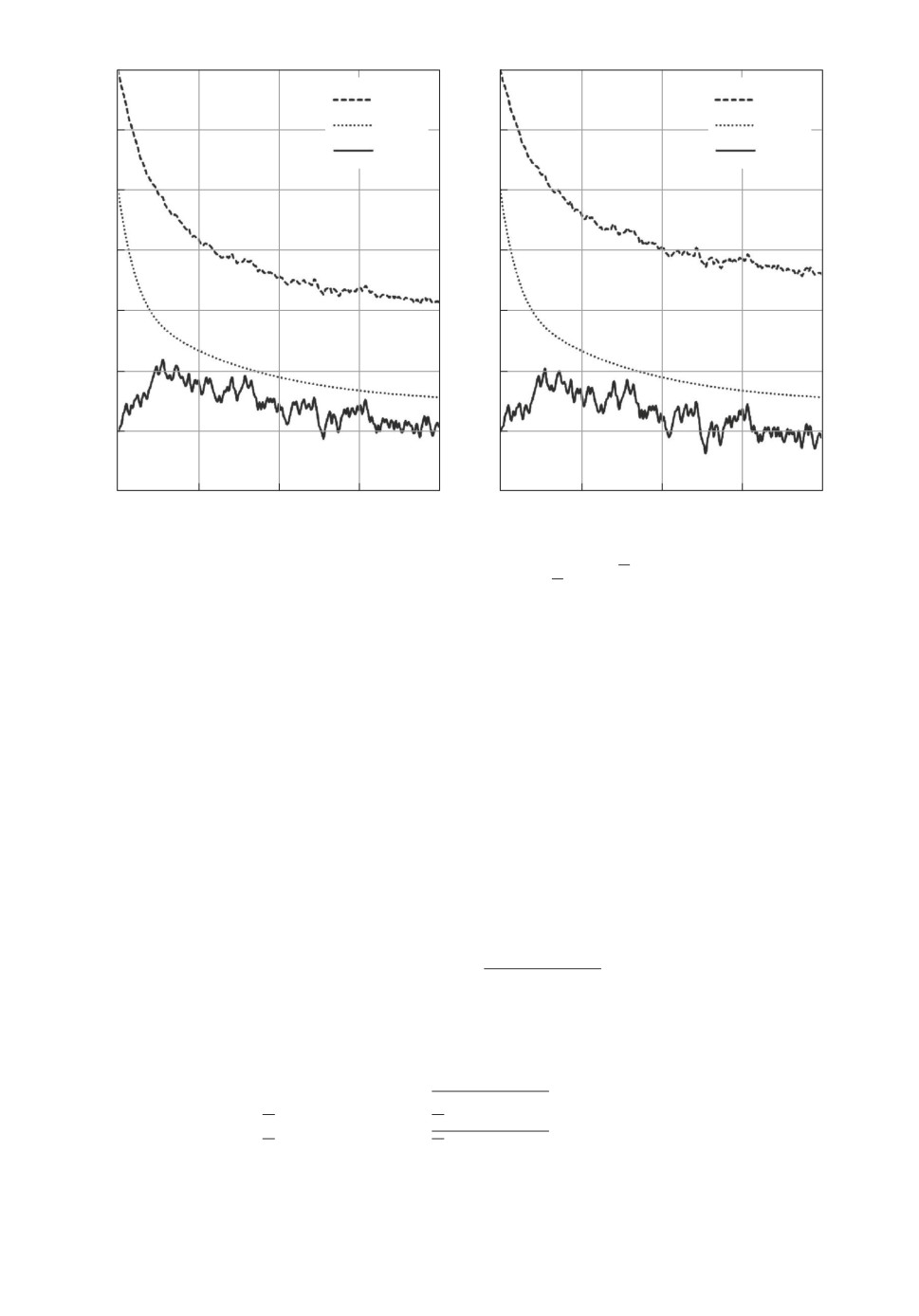
4,0
4,0
-1(t)
-1(t)
x1(t)
x1(t)
3,5
3,5
x1(t)
x1(t)
3,0
3,0
2,5
2,5
2,0
2,0
1,5
1,5
1,0
1,0
0,5
0,5
0
5
10
15
20
0
5
10
15
20
t, с
t, с
Рис. 3. Графики функций x1(t), x1(t) и x1(t).
Для интервальной оценки переменной x1(t) примем M = (1 0 0), L0 =
(
)
1
0
0
=
. Уравнение (2.5) принимает вид
0
0
1
-1 - λi 1
0
0
1
-2 - λi
(Si
-J∗i)
0,
0
1
0
=
0
0
1
из которого следует, что приняв λ = -1, получаем k = 1, S = J∗ = (1 0),
откуда Φ = (1 0 0), G∗ = (1 0), L∗ = 0, C∗ = (1 0 0). Нетрудно видеть, что
условие (6.3) выполняется и A∗1 = (1 -1 0). После упрощений модель (4.2)
принимает вид
√
x∗(t) = u1(t) -
x∗(t) - y1(t).
Поскольку функция “
√” монотонна, интервальный наблюдатель для оценки
переменной x1(t) может быть построен; он принимает вид
√
x1(t) = u1(t) -
x1(t) - y1(t) - k∗w∗1(t),
√
x1(t) = u1(t) -
x1(t) - y1(t) + k∗w∗1(t).
Отметим, что подход, рассмотренный в [5], даст наблюдатель размерно-
сти 6 и большую величину интервала, т.е. оценки более худшего качества,
51
поскольку в соответствующие выражения войдет возмущение ρ1(t), которое
отсутствует в предлагаемом решении.
Моделирование производилось при u1(t) = 0,5, u2(t) = 0,2, шумы w1(t)
и w2(t) представляют собой случайные процессы. Результаты моделиро-
вания представлены на рис. 3, где представлены графики функций x1(t),
x1(t) и x1(t), когда D[w1] = 0,1, k∗w∗1 = 0,5 и D[w1] = 0,2, k∗w∗1 = 0,6 соот-
ветственно.
9. Заключение
В работе была поставлена и решена задача построения средств диагности-
рования и оценивания на основе канонической формы Жордана. Были рас-
смотрены задачи построения диагностических наблюдателей, виртуальных
датчиков, а также интервальных и скользящих наблюдателей. Предложен-
ные алгоритмы решения указанных задач предназначены как для линейных,
так и нелинейных задач при наличии внешних возмущений и шумов измере-
ний. Показано, что использование канонической формы Жордана позволяет
в ряде случаев уменьшить сложность наблюдателей и датчиков и упростить
процедуру их синтеза при реализации требования нечувствительности к воз-
мущениям. Наиболее эффективным по сравнению с классическим подходом
является применение КФ Жордана к решению задач построения виртуаль-
ных датчиков и интервальных наблюдателей, поскольку она позволяет стро-
ить соответствующие средства минимальной размерности, нечувствительные
или малочувствительные к внешним возмущениям, что дает возможность
повысить точность оценок, формируемых датчиком, и уменьшить величину
интервала для интервальных наблюдателей.
Определенным недостатком КФ Жордана является то, что процедура на
ее основе предполагает перебор вариантов решения. Кроме того, для нее
усложняется процедура минимизации вклада возмущения в модель, когда
необходимо найти робастное решение. Более того, жорданова КФ ограничи-
вает возможности такой минимизации. Анализ показывает, что в этом случае
предпочтительнее использовать ИКФ ценой некоторого увеличения размер-
ности модели, что позволяет более эффективно минимизировать вклад воз-
мущения в модель.
СПИСОК ЛИТЕРАТУРЫ
1. Мироновский Л.А. Функциональное диагностирование динамических систем.
М.; СПб.: МГУ-ГРИФ, 1998.
2. Квакернаак Х., Сиван Р. Линейные оптимальные системы управления. М.: Мир,
1977.
3. Misawa E.A., Hedrick J.K. Nonlinear observers - a state of the art. Survey // J.
Dynamic Systems, Measurements and Control. 1989. V. 111. P. 344-352.
4. Жирабок А.Н., Шумский А.Е., Павлов С.В. Диагностирование линейных дина-
мических систем непараметрическим методом // АиТ. 2017. № 7. С. 3-21.
52
Zhirabok A., Shumsky A., Pavlov S. Diagnosis of Linear Dynamic Systems by the
Nonparametric Method // Autom. Remote Control. 2017. V. 78. No. 7. P. 1173-1188.
5.
Ефимов Д.В., Раисси Т. Построение интервальных наблюдателей для динами-
ческих систем с неопределенностями // АиТ. 2016. № 2. С. 5-49.
Efomov D., Raissi T. Design of Interval State Observers for Uncertain Dynamical
Systems // Autom. Remote Control. V. 77. No. 2. P. 191-225.
6.
Kolesov N., Gruzlikov A., Lukoyanov E. Using fuzzy interacting observers for fault
diagnosis in systems with parametric uncertainty // Proc. XII-th Inter. Symp. In-
telligent Systems, INTELS’16, 5-7 October 2016, Moscow, Russia. P. 499-504.
7.
Жирабок А.Н. Самокоррекция ошибок в дискретных динамических системах //
АиТ. 2006. № 6. С. 41-53.
Zhirabok A. Error Selfcorrection in Discrete Dynamic Systems // Autom. Remote
Control. 2006. No. 6. P. 936-948.
8.
Жирабок А.Н., Зуев А.В., Шумский А.Е. Диагностирование линейных динами-
ческих систем: подход на основе скользящих наблюдателей // АиТ. 2020. № 2.
С. 18-35.
Zhirabok A., Zuev A., Shumsky A. Diagnosis of Linear Dynamic Systems: an Ap-
proach Based on Sliding Mode Observers // Autom. Remote Control. 2020. V. 81.
No. 2. P. 211-225
9.
Ланкастер П. Теория матриц. М.: Наука, 1978.
10.
Blanke M., Kinnaert M., Lunze J., Staroswiecki M. Diagnosis and Fault-Tolerant
Control. Berlin: Springer-Verlag, 2006.
11.
Witczak M. Fault Diagnosis and Fault Tolerant Control Strategies for Nonlinear
Systems. Berlin: Springer, 2014.
12.
Ahmed Q., Bhatti A., Iqbal M. Virtual sensors for automotive engine sensors fault
diagnosis in second-order sliding modes // IEEE Sensors J. 2011. V. 11. P. 1832-1840.
13.
Heredia G., Ollero A. Virtual sensor for failure detection, identification and recovery
in the transition phase of a morphing aircraft // Sensors. 2010. V. 10. P. 2188-2201.
14.
Hosseinpoor Z., Arefi M., Razavi-Far R., Mozafari N., Hazbavi S. Virtual sensors
for fault diagnosis: a case of induction motor broken rotor bar // IEEE Sensors J.
2021. V. 21. P. 5044-5051.
15.
Жирабок А.Н., Ким Чхун Ир. Виртуальные датчики в задаче функционально-
го диагностирования нелинейных систем // Известия РАН. Теория и системы
управления. 2022. № 1. С. 40-48.
16.
Efimov D., Perruquetti W., Raissi T., Zolghadri A. Interval observers for time-
varying discrete-time systems // IEEE Trans. Automatic Control. 2013. V. 58.
P. 3218-3224.
17.
Efimov D., Polyakov A., Richard J. Interval observer design for estimation and con-
trol of time-delay descriptor systems // Eur. J. Control. 2015. V. 23. P. 26-35.
18.
Khan A., Xie W., Zhang L., Liu L. Design and applications of interval observers for
uncertain dynamical systems // IET Circuits Devices Syst. 2020. V. 14. P. 721-740.
19.
Уткин В.И. Скользящие режимы и их применение в системах с переменной
структурой. М.: Наука, 1974.
20.
Краснова С.А., Уткин В.А. Каскадный синтез наблюдателей состояния дина-
мических систем. М.: Наука, 2006.
53
21.
Edwards C., Spurgeon S., Patton R. Sliding mode observers for fault detection and
isolation // Automatica. 2000. V. 36. P. 541-553.
22.
Fridman L., Levant A., Davila J. Observation of linear systems with unknown inputs
via high order sliding-modes // Int. J. Syst. Sci. 2007. V. 38. P. 773-791.
23.
Yan X., Edwards C. Nonlinear robust fault reconstruction and estimation using a
sliding modes observer // Automatica. 2007. V. 43. P. 1605-1614.
24.
Shtessel Yu., Edwards C., Fridman L., Levant A. Sliding Mode Control and Obser-
vation. N.Y.: Springer, 2014.
25.
Wang X., Tan C., Zhou D. A novel sliding mode observer for state and fault estima-
tion in systems not satisfing maching and minimum phase conditions // Automatica.
2017. V. 79. P. 290-295.
26.
Емельянов С.В. Системы автоматического управления с переменной структу-
рой. М.: Наука, 1967.
27.
Жирабок А.Н., Зуев А.В., Сергиенко О., Шумский А.Е. Идентификация дефек-
тов в нелинейных динамических системах и их датчиках на основе скользящих
наблюдателей // АиТ. 2022. № 2. С. 63-89.
Zhirabok A., Zuev A., Seriyenko O., Shumsky A. Fault Identificaition in Nonlinear
Dynamic Systems and Their Sensors Based on Sliding Mode Observers // Autom.
Remote Control. 2022. No. 2. P. 214-236.
28.
Castillo I., Fridman L., Moreno J. Super-twisting algorithm in presence of time and
state dependent perturbations // Int. J. Control. 2018. V. 91. P. 2535-2548.
29.
Zhirabok A., Zuev A., Filaretov V., Shumsky A. Sliding mode observers for fault
identification in linear systems not satisfying matching and minimum phase condi-
tions // Archives of Control Sciences. 2021. V. 31. № 2. P. 253-266.
30.
Жирабок А.Н., Шумский А.Е., Соляник С.П., Суворов А.Ю. Метод построе-
ния нелинейных робастных диагностических наблюдателей // АиТ. 2017. № 9.
С. 34-48.
Zhirabok A., Shumsky A., Solyanik S., Suvorov A. Design of Nonlinear Robust Di-
agnostic Observers // Autom. Remote Control. 2017. No 9. P. 1572-1584.
Статья представлена к публикации членом редколлегии А.А. Бобцовым.
Поступила в редакцию 19.02.2022
После доработки 15.05.2022
Принята к публикации 10.06.2022
54