Автоматика и телемеханика, № 9, 2022
Нелинейные системы
© 2022 г. В.А. КАМЕНЕЦКИЙ, канд. физ.-мат. наук (vlakam@ipu.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
ДИСКРЕТНЫЕ ПОПАРНО СВЯЗНЫЕ СИСТЕМЫ
С ПЕРЕКЛЮЧЕНИЯМИ И СИСТЕМЫ ЛУРЬЕ,
КРИТЕРИЙ ЦЫПКИНА ДЛЯ СИСТЕМ
С ДВУМЯ НЕЛИНЕЙНОСТЯМИ1
Рассматриваются вопросы устойчивости дискретных систем с переклю-
чениями при любых законах переключения между линейными подсисте-
мами. Среди таких систем выделяются системы, которые названы попар-
но связными. Для них получено достаточное частотное условие устой-
чивости. Для систем с переключениями, устойчивость которых эквива-
лентна абсолютной устойчивости систем Лурье с двумя нелинейностями,
получено два достаточных условия и два критерия существования квад-
ратичной функции Ляпунова. Эти условия состоят в проверке разреши-
мости специальных матричных неравенств, размерности которых суще-
ственно меньше размерности исходной системы матричных неравенств,
определяющей необходимые и достаточные условия. Полученные условия
сравниваются с условиями критерия Цыпкина и с необходимыми и доста-
точными условиями на примерах систем третьего и шестого порядков.
Ключевые слова: дискретные системы с переключениями, системы Лурье,
устойчивость, функции Ляпунова, матричные неравенства.
DOI: 10.31857/S0005231022090033, EDN: AILKNJ
1. Введение
Интерес к системам с дискретным временем подтверждает тот факт, что
большинство вопросов теории управления и теории устойчивости для систем
с непрерывным временем и систем с дискретным временем рассматриваются
параллельно [1-4]. Относительно недавно вопросы устойчивости дискретных
систем рассматривались в [5-7]. Для упрощения условий существования квад-
ратичной функции Ляпунова (КФЛ) в непрерывном случае вводится понятие
попарно связных систем с переключениями [8]. Здесь это понятие переносит-
ся на дискретные системы. Показывается, что динамика попарно связных
дискретных систем с переключениями может быть представлена динамикой
1 Работа выполнена при поддержке Программы фундаментальных научных исследова-
ний по приоритетным направлениям, определяемым Президиумом Российской академии
наук, № 7 “Новые разработки в перспективных направлениях энергетики, механики и ро-
бототехники”.
55
систем Лурье специального вида. В результате для таких систем Лурье с по-
мощью S-процедуры [9] получено достаточное частотное условие существо-
вания КФЛ.
Задача устойчивости линейных дискретных систем с переключениями
обобщает [7] известную задачу об абсолютной устойчивости дискретных си-
стем управления с несколькими нестационарными нелинейностями. Здесь по-
дробно рассматривается вопрос существования КФЛ для системы с пере-
ключениями между четырьмя подсистемами в случае, когда устойчивость
этой системы эквивалентна абсолютной устойчивости системы Лурье с дву-
мя нелинейностями из конечных секторов. Прежде всего для таких систем
демонстрируется получение критерия Цыпкина без использования S-проце-
дуры. Затем получен вариант критерия Цыпкина для систем Лурье, которые
соответствуют попарно связным системам с переключениями.
Необходимые и достаточные условия существования КФЛ определяют-
ся разрешимостью специальной системы линейных матричных неравенств
(ЛМН) назовем ее исходной. Частотным условием критерия Цыпкина явля-
ется критерий разрешимости специального матричного неравенства (МН)
назовем его МН Цыпкина. МН Цыпкина является ЛМН относительно входя-
щих в него неизвестных, его разрешимость лишь достаточна для разрешимо-
сти исходной системы ЛМН, но его размерность практически в четыре раза
меньше. В работе предлагаются четыре МН, условия разрешимости которых
являются менее консервативными, чем критерий Цыпкина, а размерность
существенно меньше, чем у исходной системы. Условия разрешимости двух
из них являются лишь достаточными условиями существования КФЛ, усло-
вия двух других необходимыми и достаточными. Области существования
КФЛ, полученные с помощью новых достаточных условий, сравниваются с
областями, полученными из разрешимости МН Цыпкина и исходной системы
ЛМН, на примерах систем Лурье третьего и шестого порядков.
Объединяя перечисленные во введении вопросы, которые будут рассмот-
рены в статье, можно сказать, что целью работы является получение новых,
более эффективных условий существования КФЛ, устанавливающих устой-
чивость для широкого класса систем с переключениями.
Изложение материала статьи организовано следующим образом. В разде-
ле 2 вводится понятие попарно связных систем с переключениями и получено
достаточное частотное условие существования КФЛ. В разделе 3 для систем
с двумя нелинейностями критерий Цыпкина выводится без использования
S-процедуры. Вопросы улучшения критерия Цыпкина для систем с пере-
ключениями между четырьмя подсистемами рассматриваются в разделе 4.
В разделе 5 полученные в разделе 4 условия сравниваются с точки зрения
сложности их проверки и приводится наиболее эффективное условие, являю-
щееся критерием существования КФЛ. В разделе 6 обсуждаются результаты
по всем рассмотренным примерам и приводятся численные результаты по
четырем характерным случаям.
56
2. Попарно связные дискретные системы с переключениями
Рассматриваются линейные дискретные системы с переключениями
(2.1)
x(t + 1) = A(t)x(t), A(t) ∈ A = {A1, . . . , AN
},
где As ∈ Rn×n и A(t) : Z+ -→ A отображение из множества Z+ неотри-
цательных целых чисел в A. Все матрицы As предполагаются устойчивыми
(по Шуру), т.е. r(As) < 1, где r(As) спектральный радиус матрицы As [10],
s = 1,N.
Понятие связной дискретной системы с переключениями формулирует-
ся [7] в терминах теории графов. Каждой матрице As из системы (2.1) ставит-
ся в соответствие вершина графа. Две вершины графа соединяются ребром,
если разность матриц, которым соответствуют эти вершины, имеет вид bc⊤,
где b, c ∈ Rn, т.е. ранг матрицы разности равен 1. Система (2.1) называется
связной [7], если соответствующий ей граф является связным. Связную си-
стему (2.1) будем называть попарно связной, если каждая пара вершин из
соответствующего графа соединена ребром этого графа. В этом случае мно-
жество матриц A = {A1, . . . , AN } также будем называть попарно связным.
Отметим, что определения связной и попарно связной систем с дискретным
временем полностью совпадают с соответствующими определениями систем
с переключениями с непрерывным временем [8].
Как уже отмечалось [1, 2, 7], устойчивость системы (2.1) при любых A(t)
указанного вида эквивалентна устойчивости разностного включения
(2.2)
x(t + 1) ∈ F (x(t)), F (x) = {y : y = Ax, A ∈ convA},
где convA выпуклый многогранник в линейном пространстве Rn×n матриц
порядка n. Будем считать, что матрицы {A1, . . . , AN } являются крайними
точками множества convA, т.е. вершинами этого многогранника.
Попарно связное множество матриц A = {A1, . . . , AN } допускает одно из
двух представлений [8]:
A1 = A, As+1 = A + bc⊤s, b,cs ∈ Rn, s = 1,N - 1,
(2.3)
A1 = A, As+1 = A + bsc⊤, bs,c ∈ Rn,
s = 1,N - 1.
Пусть в попарно связной системе (2.1) матрицы As определяются соотно-
шением (2.3), тогда многозначное отображение F (x), определяющее разност-
ное включение (2.2), имеет вид
{
}
∑
∑
(2.4) F (x) = y : y = Ax + 〈c, x〉
λsbs,
λs ≤ 1, λs ≥ 0, s = 1,N - 1
,
s=1
s=1
где 〈·, ·〉
скалярное произведение в Rn.
57
Введем обозначения ϕs = λs〈c, x〉, s = 1, N - 1. Тогда условия на λs из (2.4)
эквивалентны выполнению системы неравенств на квадратичные формы в
расширенном пространстве (x, ϕ):
ϕ1(〈c,x〉 - ϕ1) ≥ 0, ϕ2(〈c,x〉 - ϕ1 - ϕ2) ≥ 0,
ϕ3(〈c,x〉 - ϕ1 - ϕ2 - ϕ3) ≥ 0,
··· ··· ··· ··· ··· ··· ···
(2.5)
(
)
∑
ϕN-1
〈c, x〉 -
ϕs
≥ 0.
s=1
По аналогии с непрерывным случаем рассмотрим систему Лурье
∑
(2.6)
x(t + 1) = Ax(t) +
bsϕs(t,σs), σs
= 〈c, x〉,
s=1
в которой ϕs(t, σs) удовлетворяют (2.5) при всех σs = 〈c, x〉 и t > 0.
В [8] показывается, что многозначное отображение F (x) из (2.4) совпадает
∑N-1
с множеством {y : y = Ax +
bsϕs,ϕs удовлетворяют (2.5)}. Таким об-
s=1
разом, система (2.6), (2.5) эквивалентна автономному разностному включе-
нию (2.2), (2.4) (эквивалентность понимается в смысле совпадения множеств
решений при одинаковых начальных условиях). В результате приходим к сле-
дующему утверждению.
Лемма 1. Вопрос об устойчивости попарно связной системы (2.1), (2.3)
при произвольных переключениях эквивалентен вопросу об устойчивости
системы Лурье (2.6) при всех нелинейностях ϕs(t,σs), σs = 〈c,x〉, удовле-
творяющих (2.5).
Замечание 1. В непрерывном случае доказывается более сильный ре-
зультат о совпадении множеств решений попарно связной системы с пере-
ключениями и соответствующей системы Лурье (теорема 2 [8]). Аналогом
леммы 1 в непрерывном случае является следствие 2 [8].
Функция Ляпунова v(x) = x⊤Lx (L ∈ Rn×n, L⊤ = L) для включения (2.2),
(2.4) будет одновременно функцией Ляпунова для системы Лурье (2.6), (2.5)
и общей квадратичной функцией Ляпунова (ОКФЛ) для системы с пере-
ключениями (2.1), (2.3), а ее наличие определяется [7, 11] разрешимостью
соответствующей системы ЛМН:
(2.7)
A⊤sLAs
− L < 0, s = 1,...,N.
Достаточные частотные условия существования КФЛ для системы Лу-
рье (2.6) при ограничениях (2.5) могут быть получены с помощью стандарт-
ной техники, основанной на использовании S-процедуры и обобщенной лем-
мы Калмана - Сеге - Попова [12, 13], как это делается в случае N = 3 для
систем треугольного типа [7].
58
В матричной форме система (2.6) имеет вид
(2.8)
x(t + 1) = Ax(t) + Bϕ,
(
)
где B =
b1 b2 ... bN-1
, и ϕ⊤ = (ϕ1 ϕ2 ... ϕN-1). Неравенство на первую
разность
△v(x(t)) = x⊤(t + 1)Lx(t + 1) - x⊤(t)Lx(t) функции Ляпунова
v(x) = x⊤Lx вдоль решений системы (2.8) имеет вид
(2.9)
△v(x,ϕ) = (Ax + Bϕ)∗L(Ax + Bϕ) - x∗
Lx < 0
и должно выполняться при всех (x, ϕ) = 0, удовлетворяющих (2.5). В соот-
ветствии с S-процедурой составим квадратичную форму
∑
∑
(2.10)
(Ax + Bϕ)∗L(Ax + Bϕ) - x∗Lx + τsϕs 〈c,x〉 - ϕq,
s=1
q=1
где τs > 0 неизвестные параметры, s = 1, N - 1. Функция ограничений
∑
∑
F (x, ϕ) =
τsϕs 〈c,x〉 -
ϕq
s=1
q=1
может быть записана в матричной форме
)
(x)⊤(
0
Cτ/2
)(x
(2.11)
F (x, ϕ) =
,
ϕ
τC⊤/2
-Γ ϕ
где
{
}
(
)
τ = diag τ1,...,τN-1
,
C = c c ... c
,
|
{z
}
N-1
τ1
τ2/2
... τN-1/2
τ2/2
τ2
... τN-1/2
Γ=
.
τN-1/2
τN-1/2
τN-1
В новых обозначениях отрицательная определенность формы (2.10) эквива-
лентна МН
(
)
A⊤LA - L A⊤LB + Cτ/2
(2.12)
< 0.
B⊤LA + τC⊤/2 B⊤LB - Γ
Из обобщенной леммы Калмана - Сеге - Попова [12, 13] условия разреши-
мости (2.12) определяются в форме частотного неравенства. В результате
аналогом теоремы 3 [8] в дискретном случае будет следующая
59
Теорема 1. Пусть матрица A устойчива (r(A) < 1) и существуют
числа τs > 0, s = 1, N - 1, такие что Γ > 0 и частотное неравенство
[
]
Γ + Re τC⊤ (A - λEn)-1 B >0
выполняется при всех λ ∈ C, |λ| = 1, где En единичная (n × n)-матрица
(Re W = (W + W∗)/2, W∗ = W⊤ эрмитово сопряженная к W ). Тогда по-
парно связная система (2.1), (2.3) имеет ОКФЛ (система (2.7) разрешима,
система (2.1) устойчива).
3. Системы с переключениями между четырьмя подсистемами.
Критерий Цыпкина
Проблема существования ОКФЛ для систем (2.1) с переключениями меж-
ду двумя или тремя подсистемами подробно рассмотрена в [7]. В случае
N = 4 связные системы (2.1) могут быть двух различных типов. Системы
этих двух типов отличаются друг от друга видом соответствующих им гра-
фов. Описание обоих этих типов систем с переключениями в дискретном слу-
чае полностью совпадает с соответствующим описанием, приведенным в [14]
для непрерывного случая. Как и в [14], здесь ограничимся рассмотрением
системы (2.1), устойчивость которой эквивалентна абсолютной устойчиво-
сти системы управления с двумя нестационарными нелинейностями из ко-
нечных секторов [12, 13]. Такая система управления описывается системой
(
)
Лурье (2.8), в которой B =
b1 b2
, т.е. системой
∑
(3.1)
x(t + 1) = Ax(t) + bsϕs(t, σs), σs = 〈cs
,x〉,
s=1
где ϕs(t, σs) удовлетворяют при всех σs = 〈cs, x〉 и t > 0 стандартным сектор-
ным ограничениям:
(3.2)
0 ≤ ϕs(t,σs)/σs ≤ 1, σs = 〈cs
,x〉, s = 1,2.
Действительно, абсолютная устойчивость такой системы Лурье эквивалент-
на [15] устойчивости разностного включения (2.2), в котором матрицы As,
s = 1,4, определяются соотношениями
A1 = A, A2 = A + b1c⊤1, A3 = A + b2c⊤2, A4 = A + b1c⊤1 + b2c⊤2,
(3.3)
bs,cs ∈ Rn.
Таким образом, объектом исследования в этом разделе является устойчи-
вость системы (2.1), определяемой матрицами (3.3). Очевидно, такая система
с переключениями будет связной. Система ЛМН (2.7), определяющая суще-
ствование ОКФЛ для этой системы, имеет вид
(3.4)
Is = A⊤sLAs
− L < 0, s = 1,4.
60
В [7] показано, что связной системе с переключениями (2.1) соответствует
связная система МН (2.7). Метод получения одного результирующего нера-
венства, эквивалентного исходной связной системе МН, приводится в [7, 11].
К сожалению, форма этого результирующего неравенства для системы (2.7)
в случае N > 2 не позволяет получить условия его разрешимости в форме
частотного критерия. Поэтому система неравенств (2.7) предварительно при-
водится в [11] к виду, характерному для непрерывного случая.
Метод получения результирующего неравенства опирается на следующее
утверждение (теорема 1 из [7]).
Теорема 2. Для выполнения системы двух МН
I1 < 0, I2 < 0, (I2 - I1 = Q = pq⊤ + qp⊤, p,q ∈ Rn),
необходимо и достаточно, чтобы существовало такое число ε> 0, при ко-
тором выполнено одно неравенство
2
ε
I1 + Q+(ε) = I2 + Q-(ε) < 0, Q±(ε) =
u±(u±)⊤, u± = p ± q/ε2.
2
В [14] показывается, как с помощью теоремы 2 получить достаточные усло-
вия существования ОКФЛ для непрерывного варианта системы (2.1) с матри-
цами (3.3), так чтобы эти условия совпадали с круговым критерием абсолют-
ной устойчивости систем управления с двумя нелинейностями. Здесь рассмот-
рим получение с помощью теоремы 2 достаточных условий разрешимости
системы (3.4) в виде частотного критерия, совпадающего с известным кри-
терием Цыпкина абсолютной устойчивости дискретных систем управления
с двумя нелинейностями. Одновременно эти условия служат достаточными
условиями существования ОКФЛ для системы (2.1) с матрицами (3.3). Под
критерием Цыпкина абсолютной устойчивости дискретных систем управле-
ния с несколькими нелинейностями здесь понимается достаточное частотное
условие существования для таких систем КФЛ, которое получено с использо-
ванием S-процедуры и обобщенной леммы Калмана - Сеге - Попова [12, 13].
Достаточность объясняется ущербностью S-процедуры в этом случае. Заме-
тим, что дискретный случай гораздо сложнее непрерывного, поскольку МН
в (3.4) зависят от As квадратично, а в непрерывном случае эта зависимость
линейна.
Коротко напомним рассуждения, основанные на S-процедуре и приводя-
щие к критерию Цыпкина. Секторные ограничения (3.2) эквивалентны квад-
ратичным ограничениям:
(3.5)
Fs(x, ϕs) = ϕs(〈cs, x〉 - ϕs) ≥ 0, s = 1,2.
Для первой разности функции Ляпунова v(x) = x⊤Lx в силу (2.8) имеем то
(
)
же неравенство (2.9), в котором B =
b1 b2
и которое должно выполнять-
ся при любых (x, ϕ) = 0, удовлетворяющих (3.5). В результате S-процедуры
61
получим квадратичную форму в расширенном пространстве
∑
(3.6)
(Ax + Bϕ)⊤L(Ax + Bϕ) - x⊤Lx + τsϕs (〈cs, x〉 - ϕs
),
s=1
где τ1 > 0 и τ2 > 0 неизвестные параметры. Функция ограничений F (x, ϕ) =
= τ1F1(x,ϕ1) + τ2F2(x,ϕ2) может быть представлена выражением (2.11), в
котором
{
}
(
)
(3.7)
Γ = τ = diag τ1,τ2
,
C = c1 c2 .
В обозначениях (3.7) отрицательная определенность формы (3.6) эквивалент-
на МН (2.12). Далее покажем, как это неравенство можно получить с помо-
щью теоремы 2.
Матрица разности I2 - I1 имеет вид
(3.8)
I2 - I1 = p1q⊤1 + q1p⊤1, p1 = A⊤Lb1 + (δ11/2)c1, q1 = c1,
где δ11 = b⊤1Lb1. Аналогично,
(3.9)
I4 - I3 = p2q⊤2 + q2p⊤2, p2 = A⊤Lb1 + (δ11/2)c1 + δ12c2, q2 = c1,
где δ12 = δ21 = b⊤1Lb2 = b⊤2Lb1. Для получения условий разрешимости (3.4),
совпадающих с критерием Цыпкина, применим теорему 2 сначала к первой,
а затем ко второй паре неравенств из (3.4), получим, что система (3.4) раз-
решима тогда и только тогда, когда существуют ε1 > 0 и ε2 > 0 такие, что
разрешима система из двух МН
2
ε21
ε2
(3.10)
I1 = I1 +
u+1(u+1)⊤ < 0,
I2 = I3 +
u+2(u+2)⊤
< 0,
2
2
где
)
(δ11
1
u+1(ε1) = A⊤Lb1 +
+
c1,
2
ε2
1
)
(δ11
1
u+2(ε2) = A⊤Lb1 +
+
c1 + δ12c2.
2
ε22
Ключевая идея последующего анализа состоит в том, чтобы перейти от
МН на (n × n)-матрицы в (3.10) к эквивалентным им МН на ((n + 1)×
×(n + 1))-матрицы, используя лемму Шура. В результате получается сле-
дующая система МН, эквивалентная (3.10):
I1
u+1
I1 < 0
I1 =
2
< 0,
(u+1)⊤ -
ε2
1
(3.11)
I3
u+2
I2 < 0
I2 =
<0.
2
(u+2)⊤ -
ε22
62
Если в (3.10) положить ε1 = ε2, то в этом случае разрешимость (3.10) бу-
дет только достаточна для разрешимости (3.4). В случае ε1 = ε2 имеем
u+2(ε1) = u+1(ε1) + δ12c2. Матрица разности I3 - I1 (как в (3.8)) имеет вид
(3.12)
I3 - I1 = p3q⊤3 + q3p⊤3, p3 = A⊤Lb2 + (δ22/2)c2, q3 = c2,
где δ22 = b⊤2Lb2. Проверяется непосредственно, что
)
̃
̃
(p3
(c2)
I2 -
I1 = pq⊤ + qp⊤, p=
,
q=
,
δ12
0
т.е. при ε1 = ε2 к системе (3.11) применима теорема 2, на основании которой
получим, что разрешимость (3.11) при ε1 = ε2 эквивалентна существованию
такого ε2 > 0 (нового), что разрешимо одно МН
(
)(
)⊤
≈
̃
ε22
1
1
(3.13)
I =
I1 +
p+
q
p+
q
< 0.
2
ε22
ε2
2
Возвращаясь к исходным обозначениям, получим что
(
)
1
)
1
c2
u+3(ε2)
(δ22
1
p+
q=p3 +
ε2
≜
,
u+3(ε2) = A⊤Lb2 +
+
c2.
2
ε22
δ12
2
ε2
δ12
2
По лемме Шура МН (3.13) эквивалентно следующему неравенству в расши-
ренном пространcтве:
I1
u+1(ε1) u+3(ε2)
2
≈
u+1(ε1)⊤
-
δ12
ε2
(3.14)
I <0= ITs =
1
< 0.
2
u+3(ε2)⊤ δ21
-
ε2
2
Разрешимость этого неравенства достаточна для разрешимости систе-
мы (3.4). Определим новые параметры τs = δss + (2/ε2s) > δss, тогда -2/ε2s =
= δss - τs, s = 1,2. Сделаем в (3.14) обратную замену I1 = A⊤LA - L и вы-
разим εs через τs, s = 1, 2. В результате получим, что неравенство (3.14) при-
нимает вид
A⊤LA - L A⊤Lb1 + (τ1/2)c1 A⊤Lb2 + (τ2/2)c
2
(•)⊤
δ11 - τ1
δ12
(3.15)
< 0.
(•)⊤
δ21
δ22 - τ2
)
(δ11 δ12
При m = 2 имеем
= B⊤LB, т.е. МН (3.15) совпадает с (2.12), в ко-
δ21
δ22
тором Γ, τ и C определены в (3.7). Такое неравенство (2.12), равно как (3.15) и
соответствующее МН (3.14), далее будем называть неравенствами Цыпкина.
63
4. Улучшения критерия Цыпкина
4.1. Сужение множества систем
В двух предыдущих секциях были рассмотрены два различных сужения
множества систем с переключениями (2.1). Это попарно связные системы с
переключениями и системы Лурье со стандартными ограничениями на нели-
нейности вида (3.2). В непрерывном случае в [8] показано, что задача устой-
чивости систем Лурье вида (2.6) даже при нескольких нелинейностях ви-
да (3.2) эквивалентна устойчивости систем с переключениями специального
вида при произвольных переключениях. Эти системы с переключениями, ко-
торые соответствуют системам Лурье, являются связными, но в общем слу-
чае попарно связными не являются. Точно такая же ситуация имеет место
в дискретном случае. С другой стороны, попарно связные системы с пере-
ключениями из раздела 2 не обязательно являются системами Лурье со стан-
дартными секторными ограничениями. В этом разделе рассмотрим системы
с переключениями, которые удовлетворяют обоим ограничениям. Для про-
стоты рассмотрим только случай m = 2. В этом случае в (3.3) c1 = c2 = c,
и теорему 2 можно применить к I1 < 0 и I4 < 0, а затем к I2 < 0 и I3 < 0.
Получим результирующее неравенство, разрешимость которого гарантирует
разрешимость (3.4) с матрицами (3.3) при c1 = c2. Это МН совпадает с (2.12),
в котором
(
)
(
)
(
)
B= b1 +b2 b1
= b b1 , C = c c ,
(
)
(4.1)
{
}
τ1
τ2
Γ=
,
τ = diag τ1,τ2
τ2
τ2
Подробные выкладки достаточно громоздки и здесь их опускаем.
4.2. Схема получения матричного неравенства,
эквивалентного исходной системе
Получение МН, эквивалентного (3.4), методом из [11] изображено на схеме
I2
←→ I1
←→ I3
←→ I4
↓ε1
↓ε3
↓ε2
I1
←→
I3
←→
I2
↓ε4
↓ε5
≈
≈
I1
←→
I2
↓ε6
≈
I
В этой схеме горизонтальные стрелки указывают на пары неравенств, к
которым применима теорема 2. Вертикальные стрелки указывают на резуль-
тирующие МН, полученные в результате применения этой теоремы, а εs
64
появляющиеся при этом новые параметры. Приведем выражения для нера-
венств из схемы через ps и qs из (3.8), (3.9), (3.12).
Неравенства первого уровня:
I1 < 0= I1 < 0, I2 < 0,
I3 < 0= I1 < 0,
I3 < 0
I2 < 0= I3 < 0, I4 < 0. Ниже для неравенств из (3.10) приведены их
более полные выражения и добавлено выражение дл
I3:
ε21
ε21
1
(4.2)
I1 = I1 +
u+1(u+1)⊤ = I2 +
u-1(u-1)⊤ < 0, u±1 = p1 ±
q1,
2
2
ε2
1
ε22
ε22
1
(4.3)
I2 = I3 +
u+2(u+2)⊤ = I4 +
u-2(u-2)⊤ < 0, u±2 = p2 ±
q2,
2
2
ε2
2
ε23
ε23
1
(4.4)
I3 = I1 +
u+3(u+3)⊤ = I3 +
u-3(u-3)⊤ < 0, u±3 = p3 ±
q3.
2
2
ε2
3
≈
≈
Неравенства второго уровня:
I1 < 0=
I1 < 0,
I3 < 0,
I2 < 0=
I2 < 0,
I3 < 0. Получение неравенств второго уровня продемонстрируем на получе-
≈
нии выражения для
I1< 0. Разност
I3
I1 допускает представление
ε23
ε21
I3
I1 =
u+3(u+3)⊤ -
u+1(u+1)⊤ = p4q⊤4 + q4p⊤4,
2
2
)
)⊤
(ε3
ε1
(ε3
ε1
где p4 =
u+3 +
u+1
и q4 =
u+3 -
u+1
. Применяя теорему 2, по-
2
2
2
2
лучим (далее используем обозначение ε±s = 1 ± 1/ε2s):
≈
ε24
ε24
I1
I1+
u+4(u+4)⊤
I3 +
u-4(u-4)⊤ < 0,
2
2
(4.5)
)
ε3
ε1
1
(ε3
ε1
ε1ε∓4
ε3ε±4
u±4 =
u+3 +
u+1 ±
u+3 -
u+1
=
u+1 +
u+3.
2
2
ε2
2
2
2
2
4
≈
Аналогично получим выражение для
I2< 0:
≈
ε25
ε25
ε2ε∓5
ε3ε±5
(4.6)
I2
I2 +
u+5(u+5)⊤
I3 +
u-5(u-5)⊤ < 0, u±5 =
u+2 +
u-3.
2
2
2
2
≈
≈
Финальное результирующее неравенство:
I1 < 0,
I2 < 0. Таким же
образом получим выражение для финального результирующего неравенства
≈
≈
ε26
ε24
ε26
(4.7)
I=
I1 +
u+6(u+6)⊤
I1 +
u+4(u+4)⊤ +
u+6(u+6)⊤ =
2
2
2
ε21
ε24
ε26
=I1 +
u+1(u+1)⊤ +
u+4(u+4)⊤ +
u+6(u+6)⊤ < 0,
2
2
2
где
)
ε5
ε4
1
(ε5
ε4
ε4ε∓6
ε5ε±6
u±6 =
u-5 +
u-4 ±
u-5 -
u-4
=
u-4 +
u-5.
2
2
ε2
2
2
2
2
6
65
4.3. Критерий A
Финальное результирующее МН (4.7) зависит от шести дополнительных
параметров. Легкий способ упростить ситуацию просто положить два из
≈
≈
≈
них равными 1. Пусть
I (ε1, ε2, ε3, 1, 1, ε6) ≜I (1). Неравенство
I (1)< 0 явля-
ется достаточным условием для выполнения всей системы (3.4) (достаточным
≈
из-за предположения ε4 = ε5 = 1). К сожалению, матрицу
I (1) не удается пре-
образовать к виду, в котором она линейно зависит от неизвестных парамет-
ров. Поэтому вернемся к МН второго уровня, которые сильно упрощаются,
если в них положить ε4 = ε5 = 1. В этом случае ε+4 = ε+5 = 2, а ε-4 = ε-5 = 0.
Тогда (см. (4.5) и (4.6))
u+4 = ε3u+3, u-4 = ε1u+1, u+5 = ε3u-3, u-5 = ε2u+2,
и для соответствующих МН второго уровня справедливы выражения
≈
ε24
ε21
I1(1)
I3 +
u-4(u-4)⊤
I3 +
u+1(u+1)⊤ =
2
2
ε21
ε23
=I1 +
u+1(u+1)⊤ +
u+3(u+3)⊤ < 0,
2
2
(4.8)
≈
ε25
ε22
I2(1)
I3 +
u-5(u-5)⊤
I3 +
u+2(u+2)⊤ =
2
2
ε22
ε23
=I1 +
u+2(u+2)⊤ +
u+3(u+3)⊤ < 0.
2
2
≈
Понятно, что МН
I (1)< 0 является результирующим для системы из двух
неравенств (4.8). Применим лемму Шура к обоим этим неравенствам и полу-
чим эквивалентную систему МН:
[
]
[
]
[
]
[
]
I1
u+
u+
I1
u+
u+
1
3
2
3
≃
≃
(4.9)
I1=
< 0,
I2=
< 0.
-2/ε21
0
-2/ε22
0
(•)⊤
(•)⊤
0
-2/ε23
0
-2/ε2
3
К системе (4.9) применима теорема 2, что приводит к результирующему
МН, разрешимость которого гарантирует разрешимость (3.4) (достаточное
условие).
Теорема 3. МН, результирующее для системы
(4.9), эквивалентно
неравенству
(
)
≃
A⊤LA - L A⊤LB + C
(4.10)
I =
< 0,
B⊤LA + C⊤
Γ
66
(
)
)
(τ1
τ2
τ3 - τ1
где B =
b1 b2 0 , C =
c1,
c2,
c1 + δ12c2 и
2
2
2
δ11 - τ1
0
(τ1 - τ3 + τ4)/2
Γ=
0
δ22 - τ2
0
.
(τ1 - τ3 + τ4)/2
0
-τ4
Доказательство теоремы 3 приведено в Приложении.
Теорема 3 уточняет результат из [16].
С одной стороны, получить аналитические условия разрешимости МН
(4.10) с помощью леммы Калмана - Сеге - Попова не представляется воз-
можным, с другой стороны, это МН является ЛМН относительно неизвест-
ных L и τs, s = 1, 4 и численно решается стандартными программными сред-
ствами.
В [16] сделано предположение, которое подтверждено приведенным там
примером, что область выполнимости МН (4.10) при оптимизации по вхо-
дящим в него параметрам превосходит область выполнимости неравенства
Цыпкина (3.15). Это предположение вполне естественно. Неравенство Цып-
кина зависит от двух дополнительных параметров, неравенство (4.10) от
четырех, т.е. чем больше параметров, тем, вообще говоря, точнее результат.
Кроме этого, при различных ε1 и ε2 отсутствует прямое повторение резуль-
татов критерия Цыпкина, которое, как показано в разделе 3, наступает в
случае ε1 = ε2. Однако это предположение не нашло подтверждения при де-
тальном рассмотрении на большем количестве примеров. Ниже в разделе 6
будет показано, что на одних примерах проверка МН (4.10) дает более точный
результат, чем критерий Цыпкина, на других наоборот.
4.4. Критерий B
Для улучшения критерия Цыпкина в этом разделе предлагается следую-
щий подход: в результирующем неравенстве (4.7) положить ε4 = ε5 = ε, но
отказаться от требования ε4 = ε5 = 1 (т.е. оставить пять дополнительных
параметров вместо шести). Далее сравнить аналитически области выполни-
мости этого неравенства и неравенства Цыпкина.
Выше показано, что из выполнения неравенства Цыпкина (3.14) следует
выполнение системы (3.4). В соответствии со схемой из раздела 4.2 в этом
случае существуют параметры εs, s = 1, 6, при которых выполняется резуль-
тирующее МН (4.7). Ключевым вопросом является возможность в этом на-
боре (при котором выполняется критерий Цыпкина) взять ε4 = ε5 = ε.
Отметим, что при получении критерия Цыпкина теорема 2 применяется
сразу к неравенства
I1 < 0 из (4.2)
I2 < 0 из (4.3) и выполнение неравен-
ств
I3 < 0 из (4.4) не обсуждается. Из общих соображений при выполне-
нии (3.14) это очевидно, покажем это формально.
67
Лемма 2. Пусть выполняется неравенство Цыпкина (3.14), тогда нера-
венств
I3 < 0 из (4.4) выполняется при ε3 = ε2, где ε2
значение пара-
метра, при котором выполняется (3.14).
Доказательство леммы 2 приведено в Приложении.
Далее выясним, при каких ε4 и ε5 выполнены неравенства второго уров-
ня (4.5) и (4.6) при условии выполнения неравенства Цыпкина.
Понятно, что определить условия, при которых из отрицательной опре-
деленности одной матрицы Ia(ν) < 0, зависящей от условного параметра ν,
следует отрицательная определенность другой матрицы Ib(ν) < 0, весьма за-
труднительно. Поэтому будем исходить из очевидного достаточного требова-
ния: если Ia(ν) < 0 и Ib(ν) ≤ Ia(ν), то Ib(ν) < 0.
Теорема 4. Пусть выполняется неравенство Цыпкина (3.14). Поло-
жим ξ ≜ ε21ε22δ212, где ε1, ε2 и δ12 определяются при выполнении (3.14). Тогда
результирующее МН (4.7) выполняется при
2+
√ξ
ε3 = ε2,
ε24 = ε25 =
2-
√ξ.
Доказательство теоремы 4 приведено в Приложении.
Заметим, что МН (4.5) и (4.6), и тем более МН (4.7), не являются ЛМН
относительно входящих в них переменных. Чтобы проверить справедливость
теоремы 4 на численных примерах, перейдем от неравенств второго уров-
ня (4.5) и (4.6) к эквивалентным им неравенствам, которые являются ЛМН.
Эти неравенства имеют вид
≈
(4.11)
I1 =
A⊤LA - L A⊤Lb1 + (τ1/2)c1 A⊤L(b2 - b1) + (τ2/2)c2 - (τ1/2)c1
=
(•)⊤
δ11 - τ1
(δ22 - δ11 + τ1 - τ2 + τ4)/2
< 0,
(•)⊤
•
-τ4
≈
(4.12)
I2 =
(
τ
3
τ3
τ2 )
A⊤3LA3 -L A⊤Lb1 +
c1 +δ12c2 A⊤L(b2 -b1)-
c1 + δ22 -δ12 -
c2
2
2
2
=
(•)⊤
δ11 - τ3
(δ22 - δ11 + τ3 - τ2 + τ5)/2
0.
<
(•)⊤
•
-τ5
МН (4.11) является ЛМН относительно неизвестных L и τs, s = 1,2,4,
МН (4.12) является ЛМН относительно неизвестных L и τs, s = 2,3,5.
Теорема 5. МН (4.11) эквивалентно МН (4.5), МН (4.12) эквивалентно
МН (4.6). Система двух МН (4.11) и (4.12) эквивалентна исходной систе-
ме (3.4).
Доказательство теоремы 5 приведено в Приложении.
68
5. Альтернативный взгляд на критерий Цыпкина
Частотное условие критерия Цыпкина получается как условие разреши-
мости специального МН (МН (3.15) в случае системы (2.8) с двумя нелиней-
ностями (3.2)). МН (3.15) является ЛМН относительно входящих в него неиз-
вестных L и τs, s = 1, 2, и численно решается стандартными программными
средствами. Более того, благодаря линейности МН (3.15), в нем, без ущерба
для вопроса о разрешимости, можно считать τ2 = 1. Таким образом, вместо
системы (3.4), имеющей общую размерность 4n, можно рассматривать одно
МН (3.15) размерности n + 2 с одним дополнительным параметром (разуме-
ется, принимая во внимание риски, связанные с ущербностью S-процедуры
и обусловленные этим потери в области существования КФЛ).
Рассматривая полученные в предыдущих разделах условия существования
КФЛ под углом сложности их проверки, отметим следующее.
Достаточное условие теоремы 3, назовем его критерием A, представляет
собой проверку МН (4.10), в котором в силу линейности можно положить
τ4 = 1. Таким образом, проверка критерия A состоит в проверке МН размер-
ности n + 3 с тремя дополнительными параметрами.
Условие, вытекающее из теоремы 5, состоит в проверке системы из двух
МН (4.11), (4.12). Полагая в ней в силу линейности τ5 = 1, получим систему
ЛМН общей размерности 2n + 4 с четырьмя дополнительными параметрами,
которая эквивалентна исходной системе (3.4). Если в системе (4.11), (4.12) по-
ложить τ4 = τ5 = τ, то условие ее разрешимости будет достаточным условием
разрешимости системы (3.4). Дополнительно в силу линейности положим в
системе (4.11), (4.12) τ4 = τ5 = 1. В результате получим достаточное условие
разрешимости (3.4), назовем его критерием B, состоящее в проверке системы
ЛМН общей размерности 2n + 4 с тремя дополнительными параметрами.
Наконец, более выгодной с прикладной точки зрения выглядит численная
проверка системы ЛМН (3.11), которая, как сказано при ее получении, эк-
вивалентна исходной системе (3.4). Выразим МН системы (3.11) в исходных
обозначениях (3.4), (3.10), используя (Π.2) для τ1 и τ3, и сформулируем этот
результат в виде теоремы.
Теорема 6. Система ЛМН (3.4) эквивалентна системе
(
)
τ1
̃
A⊤LA - L A⊤Lb1 +
c1
I1 =
2
< 0,
(•)⊤
δ11 - τ1
(5.1)
(
)
τ3
̃
A⊤3LA3 - L A⊤Lb1 +
c1 + δ12c2
I2 =
2
< 0,
(•)⊤
δ11 - τ3
которая является системой ЛМН относительно входящих в нее неизвест-
ных L, τ1 и τ3.
В системе (5.1) в силу линейности можно положить τ3 = 1. В результате
получим необходимое и достаточное условие разрешимости (3.4), состоящее
69
в проверке системы ЛМН общей размерности 2n + 2 (т.е. почти в два раза
меньше) с одним дополнительным параметром.
Критерии A и B имеют скорее теоретический интерес, так как уступают
по эффективности критерию теоремы 6.
6. Примеры
Если устойчивость удается установить с помощью КФЛ, то иногда го-
ворят, что установлена “квадратичная устойчивость”. Поэтому для кратко-
сти вместо “область существования КФЛ” будем использовать термин “об-
ласть квадратичной устойчивости” (ОКУ). Было рассмотрено более пяти-
десяти примеров систем вида (3.1), (3.2) третьего и шестого порядков, для
которых находились оценки ОКУ, вычисляемые с помощью тестируемых
алгоритмов из некоторого набора. Этот набор состоит из следующих ал-
горитмов. Алгоритм NS (обозначения алгоритмов далее будут использо-
ваться в таблицах) состоит в нахождении ОКУ в соответствии с необхо-
димыми и достаточными условиями существования КФЛ путем проверки
системы (3.4). Алгоритм T s состоит в нахождении оценки ОКУ с помо-
щью критерия Цыпкина, т.е. путем проверки МН (3.15). Алгоритм A состо-
ит в нахождении оценки ОКУ на основании теоремы 3, т.е. путем провер-
ки МН (4.10). Алгоритм B состоит в нахождении оценки ОКУ на основа-
нии теоремы 5, т.е. путем проверки системы (4.11), (4.12). Алгоритм P W
используется в соответствии с теоремой 1 для попарно связных систем и
состоит в нахождении оценки ОКУ путем проверки МН (2.12), в котором
(
)
(
)
{
}
при N = 4: B =
b1 b2 b1 + b1
, C =
c c c
, c = c1 = c2, τ = diag
τ1,τ2,τ3
,
(
)
Γ=
τ1 τ2/2 τ3/2; τ2/2 τ2 τ3/2; τ3/2 τ3/2 τ3
(для экономии места матри-
ца Γ записана построчно, а знаки “ ; ” обозначают переход на следующую
строку).
Для нахождения ОКУ рассматривается луч, выходящий из точки 0. Да-
лее выбирается и фиксируется произвольный вектор α = (α1, α2) (естествен-
но, αs ≥ 0), направленный вдоль этого луча, и решается задача определения
наибольшего числа k, такого что при (k1, k2) = kα выполняется условие со-
ответствующего критерия. Для каждой системы, рассмотренной в качестве
примера, проводилось сравнение алгоритмов из указанного набора по пяти
различным направлениям αi, i = 1, 5.
Отметим закономерности, выявленные по результатам во всех рассмотрен-
ных примерах. Очень хорошо показал себя критерий Цыпкина. Более чем в
половине случаев область по критерию Цыпкина совпадает с точной ОКУ.
Во всех рассмотренных примерах область по критерию B либо больше, либо
совпадает с областью по критерию Цыпкина. Область по критерию A в неко-
торых примерах превосходит область по критерию Цыпкина, а в некоторых
наоборот. При этом в ряде случаев область по критерию A превосходит об-
ласть по критерию B. Область по P W алгоритму почти во всех случаях усту-
пает области по T s алгоритму. Это отчасти объясняется тем, что у критерия
70
Цыпкина и критерия теоремы 1 не совпадают области применения. Нахожде-
ние оценки ОКУ для попарно связных систем с помощью проверки МН (2.12)
при (4.1) во всех примерах дает точно тот же результат, что и критерий Цып-
кина. Этот факт не отражен в таблицах. Также был проверен численно, но
не отражен в таблицах тот факт, что при проверке системы (4.11), (4.12) при
τ4 = 1 и системы (5.1) при τ3 = 1 получается точная оценка ОКУ.
Отметим также, что для одной и той же системы результаты могут прин-
ципиально отличаться для разных направлений.
Во всех таблицах, приведенных ниже (см. табл. 1-4), в верхней строке
указываются лучи αi, i = 1, 5, вдоль которых оценивается ОКУ, а в левом
столбце приведены обозначения используемых для этого алгоритмов. Номера
таблиц совпадают с номерами примеров, к которым они относятся.
Пример 1. Рассматривается система Лурье вида (3.1) при n = 3, в кото-
рой
A = [0
0
-0,5;
0,5
0
-1,5;
0
0,5
-1,5],
spectr(A) = [-0,5
- 0,5
- 0,5],
b⊤1 = (0 0 k1), b⊤2 = (0 k2 0), c⊤1 = (0 0 1), c⊤2 = (0 0 1),
где матрица A записана построчно. Система попарно связна, так как c1 = c2.
Пример 1 уточняет результаты из [16].
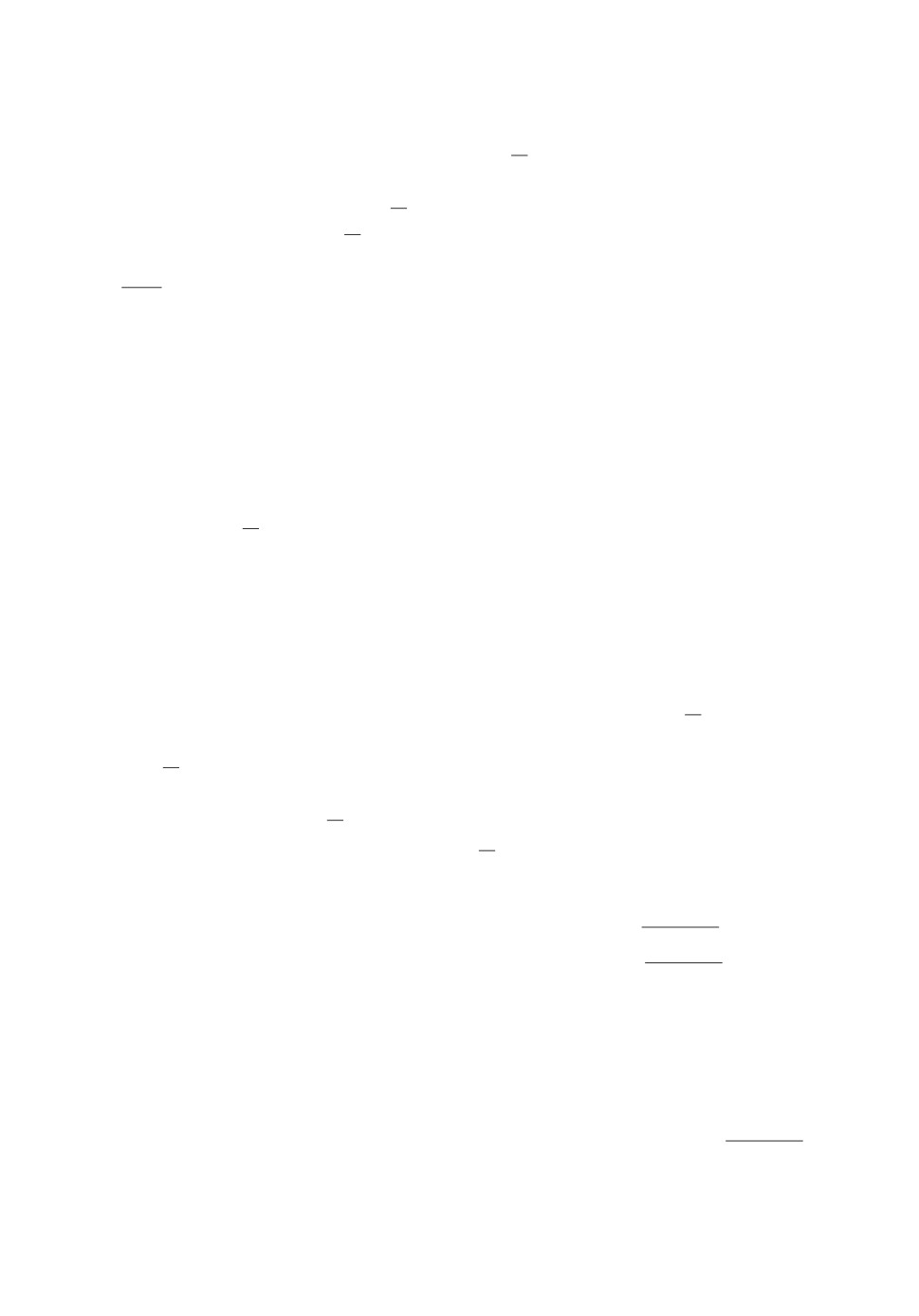
Таблица 1
Прогр. Лучи
(1, 1)
(1, 2)
(1, 3)
(2, 1)
(3, 1)
NS
0,24999
0,12499
0,08333
0,24107
0,18396
Ts
0,24999
0,12499
0,08333
0,23502
0,17749
A
0,24999
0,12499
0,08333
0,23867
0,18393
B
0,24999
0,12499
0,08333
0,23858
0,18195
PW
0,23211
0,12499
0,08241
0,15263
0,10659
Sh
0,24999
0,12499
0,08333
0,24999
0,24999
Вычислив в этом примере область устойчивости (шуровости) матриц As
(последняя строка в табл. 1), приходим к выводу, что дискретный аналог
квадратичной проблемы Айзермана имеет положительное решение для на-
правлений (1, 1), (1, 2) и (1, 3). Это означает (с точностью до погрешности
вычислений), что в этих случаях алгоритмы A и B не только позволяют най-
ти всю ОКУ, но и то, что ОКУ совпадает с точной областью устойчивости.
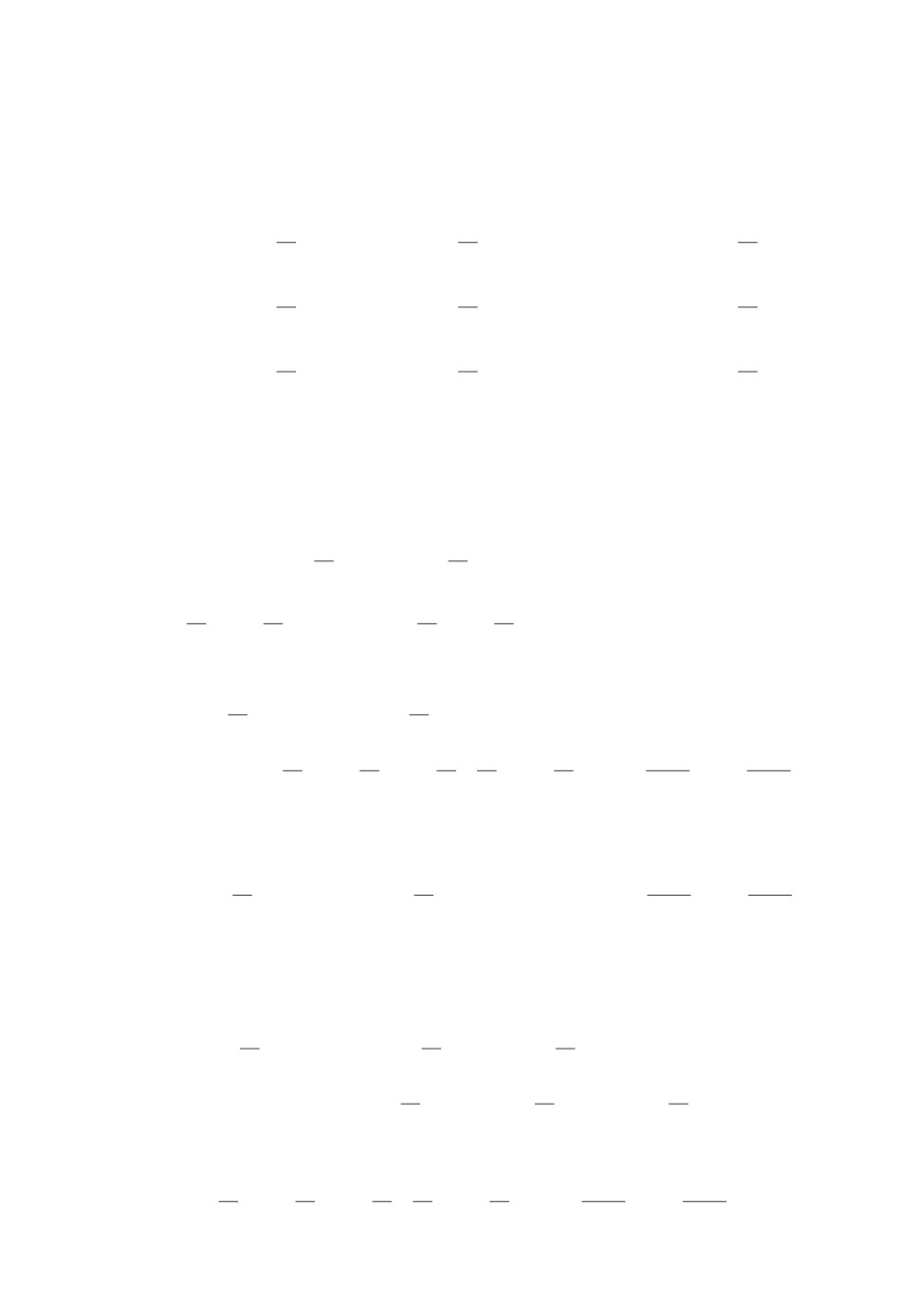
Пример 2. Рассматривается система Лурье вида (3.1) при n = 3, в кото-
рой
A = [0 1 0;
0 0 1;
0,125 0,15
- 0,3],
spectr(A) = [-0,4 + 0,3i
- 0,4 - 0,3i 0,5],
b⊤1 = (k1 0 k1), b⊤2 = (k2 k2 k2), c⊤1 = (1 1 0), c⊤2 = (0 1 - 1).
71
Таблица 2
Прогр. Лучи
(1, 1)
(1, 2)
(1, 3)
(2, 1)
(3, 1)
NS
0,28041
0,21944
0,17183
0,15223
0,10308
Ts
0,27338
0,20921
0,16512
0,15124
0,10280
A
0,28033
0,21904
0,17148
0,15219
0,10306
B
0,27964
0,21931
0,17183
0,15205
0,10302
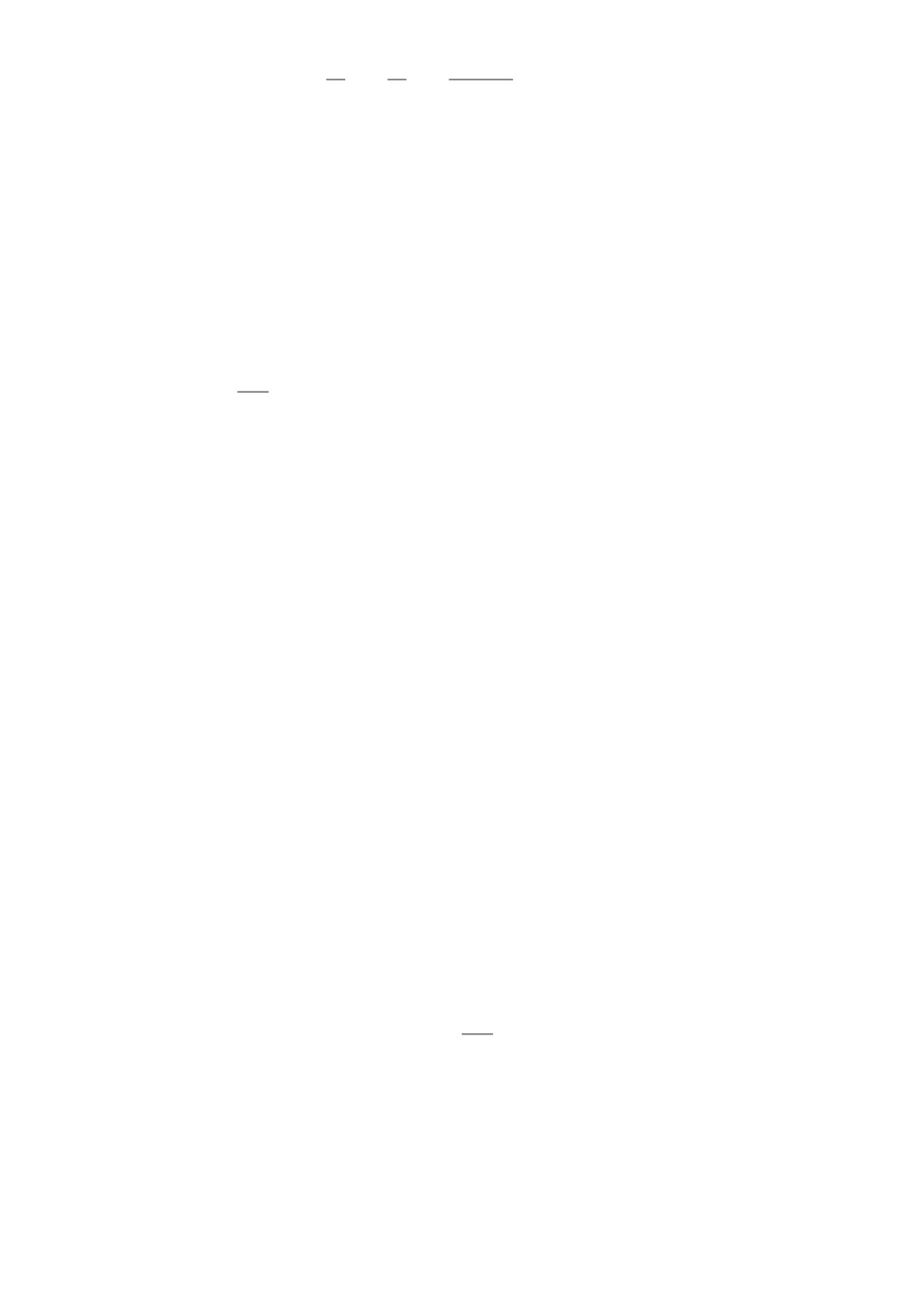
Пример 3. Рассматривается система Лурье вида (3.1) при n = 3, в кото-
рой
A = [0 1 0;
0 0 1;
-0,125 0,05 0,1],
spectr(A) = [0,3 + 0,4i 0,3 - 0,4i
- 0,5],
b⊤1 = (0 0 k1), b⊤2 = (0 k2 0), c⊤1 = (0 0 1), c⊤2 = (0 1 1).
Таблица 3
Прогр. Лучи
(1, 1)
(1, 2)
(1, 3)
(2, 1)
(3, 1)
NS
0,71219
0,44570
0,31324
0,43866
0,30943
Ts
0,69671
0,43879
0,31168
0,43866
0,30835
A
0,70536
0,44363
0,31293
0,43386
0,30178
B
0,69671
0,43879
0,31168
0,43866
0,30942
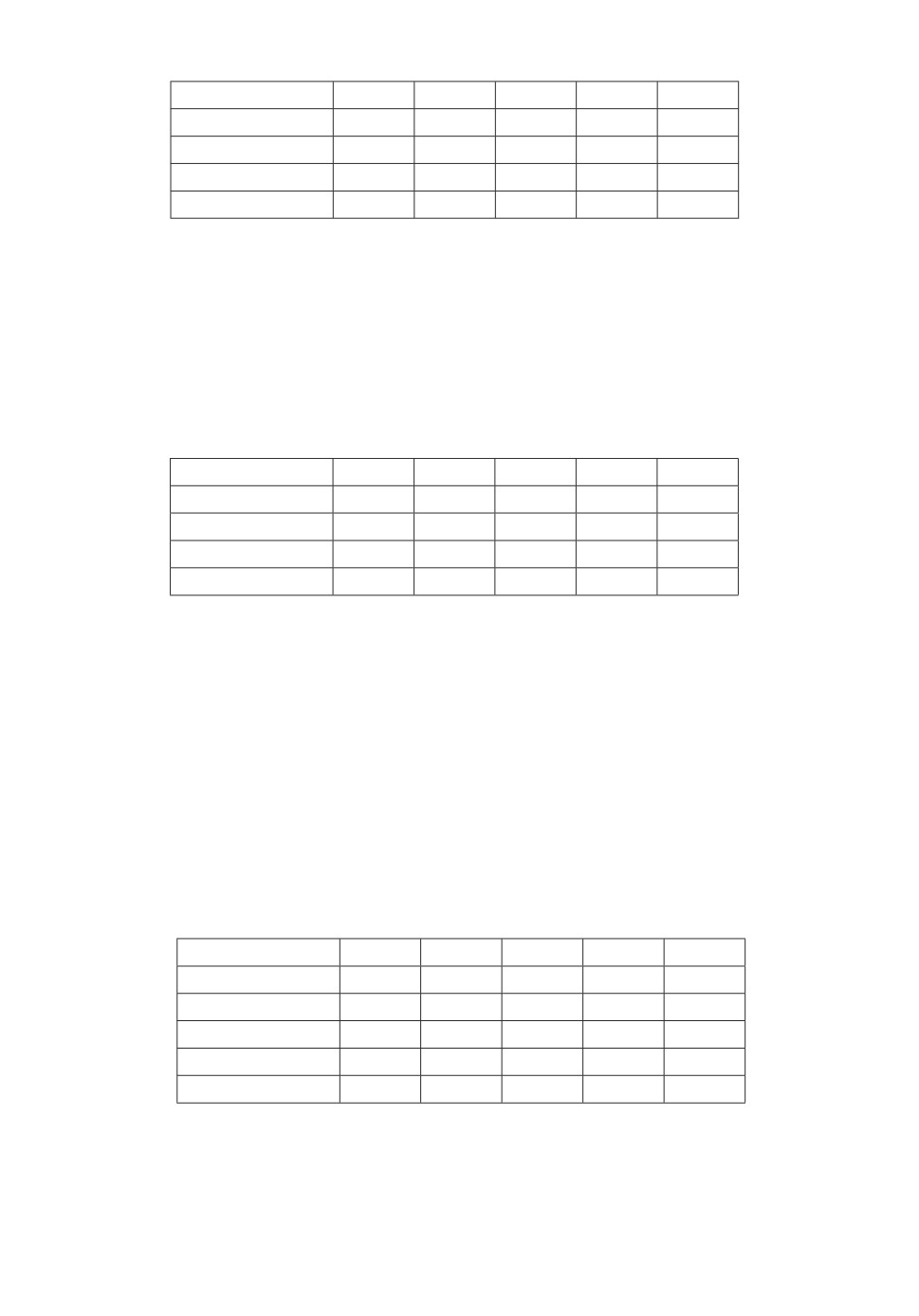
Пример 4. Рассматривается система Лурье вида (3.1) при n = 6, в ко-
торой матрица A имеет форму Фробениуса и поэтому здесь задается только
последней строкой
A ∼ [0,0625 0
- 0,25 0 0,25 0],
spectr(A) = [-0,5
- 0,5 + 0,5i
- 0,5 - 0,5i 0, 5 + 0, 5i 0, 5 - 0, 5i 0, 5],
b⊤1 = (0 0 0 0 0 k1), b⊤2 = (0 0 0 0 k2 0),
c⊤1 = (0 0 0 0 0 1), c⊤2 = (0 0 0 0 0 1).
Система попарно связна, так как c1 = c2.
Таблица 4
Прогр. Лучи
(1, 1)
(1, 2)
(1, 3)
(2, 1)
(3, 1)
NS
0,76665
0,63449
0,53687
0,42254
0,29070
Ts
0,75869
0,62624
0,52991
0,42042
0,28996
A
0,76174
0,63139
0,53578
0,42116
0,29023
B
0,76552
0,63431
0,53685
0,42199
0,29052
PW
0,62305
0,57036
0,51425
0,32334
0,21802
7. Заключение
В настоящей работе понятие попарно связных систем с переключениями
переносится на дискретные системы. Показано, что динамика таких систем
72
может быть представлена динамикой систем Лурье с квадратичными ограни-
чениями на нелинейности. Это позволяет получить с помощью S-процедуры
частотный критерий устойчивости таких систем.
Задача устойчивости дискретных систем с переключениями тесно связана
с задачей об абсолютной устойчивости дискретных систем Лурье с несколь-
кими нелинейностями из конечных секторов. Здесь для системы Лурье с дву-
мя нелинейностями критерий Цыпкина получен без использования S-проце-
дуры, что привносит методическое разнообразие в изложение классических
результатов.
Помимо теоретического интереса, который связан с получением новых
аналитических условий существования КФЛ, предлагаемые в работе резуль-
таты имеют существенное прикладное значение, так как позволяют зна-
чительно снизить размерность систем ЛМН, определяющих существование
КФЛ. Это снижение размерности может быть достигнуто как с потерей в
ОКУ, так и без такой потери. Наиболее эффективным с прикладной точки
зрения является критерий теоремы 6, состоящий в проверке разрешимости
ЛМН, размерность которого практически в два раза меньше размерности
исходной системы и при этой проверке не происходит потерь в ОКУ.
ПРИЛОЖЕНИЕ
Доказательство теоремы
3. Пусть γ ≜1
-1
и p≜u+2 -u+1 =
ε21
ε22
= -γc1 + δ12c2. Матрица разности допускает представление
[ ]
[
]
0n×n
p
0n×1
≃
≃
I2 -
I1 =
=
(•)⊤
2γ
0
(•)⊤
0
0
[ ]
[
]
p
0n×1
(
)
(
)
=
01×n
1
0
+
p⊤ γ
0
γ
1
0
0
(во избежание путаницы используется обозначение 0n×m это матрица раз-
мера n × m, все элементы которой равны 0). На основании теоремы 2 резуль-
≃
≃
тирующее неравенство для системы двух неравенств
I1 < 0 и
I2 < 0 из (4.9)
имеет вид:
[ ]
[ ]
⊤
p
p
≈
ε26
I1 +
1
1
< 0.
2
+
+
γ
γ
ε26
ε26
0
0
73
≈
Еще раз применим лемму Шура, получим
I <0:
[ ]
p
≃
1
I1
≃
γ+
ε26
(Π.1)
I =
=
0
[
]⊤
1
2
p
γ+
0
-
ε26
ε2
6
[
]
[
]
[ ]
I1
u+
u+
p
1
3
[
]⊤
2
1
u+1
-
0
γ+
ε21
ε26
=
< 0.
[
]⊤
2
u+3
0
-
0
ε2
3
[
]⊤
1
2
p
γ+
0
-
ε26
ε2
6
Подставим в u+s выражения для ps и qs из (3.8), (3.9) и (3.12), введем новые
параметры τs, s = 1, 3, получим:
τ1
2
u+1 = A⊤Lb1 +
c1,
τ1 ≜ δ11
+
,
2
ε2
1
τ2
2
(Π.2)
u+3 = A⊤Lb2 +
c2,
τ2 ≜ δ22
+
,
2
ε2
3
τ3
2
u+2 = A⊤Lb1 +
c1 + δ12c2, τ3 ≜ δ11
+
2
ε2
2
Выразим γ через τs и добавим τ4:
1
1
1
2
(Π.3)
γ =
-
=
(τ1 - τ3) , τ4 ≜
ε21
ε22
2
ε2
6
≃
В обозначениях (Π.2) и (Π.3) МН (Π.1) в точности совпадает с МН
I <0
из (4.10).
Теорема 3 доказана.
Доказательство леммы 2. Применим лемму А4 [17, c. 253] к нера-
венству Цыпкина (3.14)
+
I1
u
(ε2)
3
ε21
(u+1(ε1))(
)
(Π.4)
ITs < 0=
ITs =
u+1(ε1)⊤ δ12
< 0.
2
+
2
δ12
u+3(ε2)⊤
-
ε2
2
74
(
)
I
1
u+3(ε2)
Получим, что из
ITs < 0 следуе
I3 < 0=
< 0.
u+3(ε2)⊤
-ε22/2
Лемма 2 доказана.
Доказательство теоремы 4. Покажем, что из выполнения неравен-
≈
ства Цыпкина (3.14) следует существование ε4, при котором выполнено
I1< 0.
Преобразуем дальш
ITs из (Π.4)
I1
u+3(ε2)
u+1(ε1)u+1(ε1)⊤ δ12u+1(ε1)
ε21
=
ITs =
2
+
2
u+3(ε2)⊤
-
δ12u+1(ε1)⊤
δ2
ε22
12
2
ε
ε21
1
u+1(ε1)u+1(ε1)⊤
δ12u+1(ε1) + u+3(ε2)
I1 +
2
2
=
0.
<
ε21
2
ε21
δ12u+1(ε1)⊤ + u+3(ε2)⊤
-
+
δ2
12
2
ε22
2
2ε22
1
2
ε21
Введем обозначения ξ ≜ ε21ε22δ212, γ1 ≜
, т.е. -
=-
+
δ212 (4-ξ > 0
4-ξ
γ1
ε22
2
является следствие
ITs < 0). По лемме Шура получим
ε21
ITs < 0
I Ts = I1 +
u+1(ε1)u+1(ε1)⊤ +
2
(
)(
)⊤
+γ1
α1u+1(ε1) + u+3(ε2)
α1u+1(ε1) + u+3(ε2)
< 0,
где α1 ≜ (ε21δ12)/2. Таким образом, разность между квадратичными форма-
≈
̂
ми, соответствующими матрицам
ITs и
I1 из (4.5), представляет собой раз-
ность квадратов. Введем еще упрощающие обозначения
(Π.5)
α2 ≜ ε1ε-4/2, β2 ≜ ε2ε+4/2 > 0, γ2 ≜ ε24
/2 > 0 ,
тогда
≈
(
)(
)⊤
̂
I1 -
I Ts ≜ Δ1 = γ2
α2u+1(ε1) + β2u+3(ε2)
α2u+1(ε1) + β2u+3(ε2)
-
(
)(
)⊤
−γ1
α1u+1(ε1) + u+3(ε2)
α1u+1(ε1) + u+3(ε2)
Неравенство Δ1 ≤ 0 для разности квадратов будет выполняться, если стоя-
щие под этими квадратами линейные формы будут пропорциональны, т.е.
(
)
α1u+1(ε1) + u+3(ε2) = λ
α2u+1(ε1) + β2u+3(ε2)
,
u+1(α1 - λα2) = u+3(-1 + λβ2).
Векторы u+1 и u+3, вообще говоря, произвольные, поэтому последнее равен-
ство возможно, только если α1 - λα2 = 0 и 1 - λβ2 = 0, т.е. λ = α1/α2 = 1/β2.
75
Вернемся к значениям αs и βs, получим
(
)
(
ε21δ12
2
ε1δ12
2
1
1
1
)ε2
=
=
;
1-
=
1+
;
2
ε1ε-4
ε-4
ε2ε+4
ε2
ε1δ12
ε2
2
4
4
(
)
1
1
ε2
1
ε2
1
2+
√ξ
2-
+
=
-
;
=
√ξ ;
ε2
ε1δ12
2
ε1δ12
2
ε2
2ε1δ12
2ε1δ12
4
4
2+
√ξ
ε24 =
2-
√ξ.
Случай α1 = α2 = 0 особый, он означает, что ε4 = 1 и δ12 = 0. Напомним,
что δ12 = b⊤1Lb2 и случай δ12 = 0 возможен. В этом случае линейные формы
автоматически пропорциональны.
≈
Перейдем к вопросу о существовании ε5, при котором выполнено
I2 < 0.
Сначала представим неравенство Цыпкина в другой эквивалентной форме.
̃
Для этого неравенство (3.13) представим в виде (I2 определена в (3.11))
(
)(
)⊤
≈
̃
ε22
1
1
I =
I2 +
p-
q
p-
q
< 0.
2
ε22
ε2
2
Далее, действуя по аналогии, получим неравенство Цыпкина в форме, отлич-
ной от (3.14):
I3
u+2(ε1) u-3(ε2)
2
≈
u+2(ε1)⊤
-
δ12
I <0=
ITs =
ε2
0.
1
<
2
u-3(ε2)⊤ δ21
-
ε2
2
Проделав
ITs те же преобразования, что проделаны выше с ITs из (3.14),
а затем
ITs из (Π.4), получим
ε21
ITs < 0
I Ts = I3 +
u+2(ε1)u+2(ε1)⊤ +
2
(
)(
)⊤
+γ1
α1u+2(ε1) + u-3(ε2)
α1u+2(ε1) + u-3(ε2)
< 0.
Таким образом, разность между квадратичными формами, соответствующи-
≈
̃
ми матрицам
ITs и
I2 из (4.6), представляет собой разность квадратов
≈
(
)(
)⊤
̃
I2 -
I Ts ≜ Δ2 = γ2
α2u+2(ε1) + β2u-3(ε2)
α2u+2(ε1) + β2u-3(ε2)
-
(
)(
)⊤
−γ1
α1u+2(ε1) + u-3(ε2)
α1u+2(ε1) + u-3(ε2)
,
где коэффициенты α2, β2 и γ2 теперь определяются соотношением (Π.5), в
котором нужно заменить ε4 на ε5. Повторяя для анализа неравенства Δ2 ≤ 0
76
рассуждение о пропорциональности линейных форм, приведенное выше при
анализе Δ1 ≤ 0, получим, что Δ2 ≤ 0 при
2+
√ξ
ε25 =
2-
√ξ.
Вычисление Δ1 и Δ2 при найденных ε4 и ε5 дает Δ1 = Δ2 = 0.
Теорема 4 доказана.
Доказательство теоремы 5. Получим другое эквивалентное пред-
≈
ставление для
I1 < 0 из (4.5). Для этого сначала применим лемму Шура к
неравенствам первого уровня (4.2) и (4.4):
I1
u+1
I1 < 0
I1 =
< 0,
(u+1)⊤ -2/ε2
1
(Π.6)
I1
u+3
I3 < 0
I3 =
< 0.
(u+3)⊤ -2/ε2
3
Матрица разности имеет вид
0n×n u3 - u1
̃
̃
I3 -
I1 =
(•)⊤
2/ε21 - 2/ε2
3
Введем обозначения p1 ≜ u+3 - u+1 и γ13 ≜ 1/ε21 - 1/ε23, тогда легко видеть, что
(
)
(
)
̃
̃
p1
0n×1
I2 -
I1 = p1 q1⊤ + q1 p1⊤, p1 =
,
q1 =
,
γ13
1
т.е. к системе (Π.6) применима теорема 2, на основании которой получим, что
разрешимость системы (Π.6) эквивалентна существованию такого ε4 > 0, что
разрешимо одно МН
(
)(
)⊤
≈
ε24
1
1
(Π.7)
I1< 0
I1 +
p1 +
q1
p1 +
q1
< 0.
2
ε24
ε2
4
По лемме Шура МН (Π.7) эквивалентно следующему неравенству в расши-
ренном пространcтве:
̂
≈
≈
I1
p1 + (1/ε24)q1
(Π.8)
I1< 0=
I1 =
=
(•)⊤
-2/ε2
4
I1
u+1(ε1)
p
1
(•)⊤
-2/ε21
γ13 + 1/ε24
=
< 0.
(•)⊤ γ13 + 1/ε24
-2/ε2
4
77
≈
Выразим
I1 из (Π.8) в исходных терминах, используя для τ1 и τ2 обозначения
из (Π.2) и полагая τ4 ≜ 2/ε24. В результате получим, что МН (Π.8) совпадает
с МН (4.11).
Проведем аналогичные выкладки, чтобы получить другое эквивалентное
≈
представление для
I2 < 0 из (4.6). Для этого сначала применим лемму Шура
̃
к неравенствам первого уровня (4.3) и (4.4) (теперь другое
I3):
I3
u+2
I2 < 0
I2 =
< 0,
(u+2)⊤ -2/ε2
2
(Π.9)
I3
u-3
I3 < 0
I3 =
< 0.
(u-3)⊤ -2/ε2
3
Матрица разности имеет вид
0n×n u3 - u2
̃
̃
I3 -
I2 =
(•)⊤
2/ε22 - 2/ε2
3
Введем обозначения p2 ≜ u-3 - u+2 и γ23 ≜ 1/ε22 - 1/ε23, тогда легко видеть,
что
)
̃
̃
(p2
(0n×1)
I3 -
I2 = p2 q⊤2 + q2 p⊤2,
p2 =
,
q2 =
,
γ23
1
т.е. к системе (Π.9) применима теорема 2, на основании которой получим, что
разрешимость системы (Π.9) эквивалентна существованию такого ε5 > 0, что
разрешимо одно МН
(
)(
)⊤
≈
ε25
1
1
(Π.10)
I2 < 0
I2 +
p2 +
q2
p2 +
q2
< 0.
2
ε25
ε2
5
По лемме Шура МН (Π.10) эквивалентно следующему неравенству в расши-
ренном пространcтве:
̂
≈
≈
I2
p2 + (1/ε25)q2
(Π.11)
I2 < 0=
I2 =
=
(•)⊤
-2/ε2
5
I3
u+2(ε2)
p
2
(•)⊤
-2/ε22
γ23 + 1/ε25
=
< 0.
(•)⊤ γ23 + 1/ε25
-2/ε2
5
78
≈
Выразим
I2 из (Π.11) в исходных терминах, используя для τ2 и τ3 обозначения
из (Π.2) и полагая τ5 ≜ 2/ε25. В результате получим, что МН (Π.11) совпадает
с МН (4.12).
Поскольку система двух МН (4.5) и (4.6) эквивалентна результирующему
МН (4.7), то система двух МН (4.11) и (4.12) тоже эквивалентна МН (4.7), а
следовательно, и исходной системе (3.4).
Теорема 5 доказана.
СПИСОК ЛИТЕРАТУРЫ
1.
Shorten R., Wirth F., Mason O. et al. Stability Сriteria for Switched and Hybrid
Systems // SIAM Rev. 2007. No. 4. P. 545-592.
2.
Lin H., Antsaklis P.J. Stability and Stabilizability of Switched Linear Systems: a Sur-
vey of Recent Results // IEEE Trans. Autom.Control. 2009. V. 54. No. 2. P. 308-322.
3.
Fradkov A. Early Ideas of the Absolute Stability Theory / 2020 European Con-
trol Conference (ECC). May 12-15. 2020. Saint Petersburg. Russia. P. 762-768.
4.
Поляк Б.Т., Хлебников М.В., Щербаков П.С. Линейные матричные неравенства
в системах управления с неопределенностью // АиТ. 2021. № 1. С. 3-54.
Polyak B.T., Khlebnikov M.V., Shcherbakov P.S. Linear Matrix Inequalities in Con-
trol Systems with Uncertainty // Autom. Remote Control. 2021. V. 82. No. 1.
P. 1-40.
5.
Александров А.Ю., Платонов А.В. Об устойчивости решений одного класса
нелинейных разностных систем с переключениями // АиТ. 2016. № 5. С. 37-49.
Aleksandrov A.Yu., Platonov A.V. On Stability of Solutions for a Class of Nonlinear
Difference Systems with Switching // Autom. Remote Control. 2016. V. 77. No. 5.
P. 779-788.
6.
Проскурников А.В., Матвеев А.С. Критерии Цыпкина и Джури-Ли синхрони-
зации и устойчивости дискретных многоагентных систем // АиТ. 2018. № 6.
С. 119-139.
Proskurnikov A.V., Matveev A.S. Tsypkin and Jury-Lee Criteria for Synchronization
and Stability of Discrete-Time Multiagent Systems // Autom. Remote Control. 2018.
V. 79. No. 6. P. 1057-1073.
7.
Каменецкий В.А. Частотные условия устойчивости дискретных систем с пере-
ключениями // АиТ. 2018. № 8. С. 3-26.
Kamenetskiy V.A. Frequency-Domain Stability Conditions for Discrete-Time
Switched Systems // Autom. Remote Control. 2018. V. 79. No. 8. P. 1371-1389.
8.
Каменецкий В.А. Системы с переключениями, системы Лурье, абсолютная
устойчивость, проблема Айзермана // АиТ. 2019. № 8. С. 9-28.
Kamenetskiy V.A. Switched Systems, Lur’e Systems, Absolute Stability, Aizerman
Problem // Autom. Remote Control. 2019. V. 80. No. 8. P. 1375-1389.
9.
Гусев С.В., Лихтарников А.Л. Очерк истории леммы Калмана-Попова-Яку-
бовича и S-процедуры // АиТ. 2006. № 10. С. 77-121.
Gusev S.V., Likhtarnikov A.L. Kalman-Popov-Yakubovich Lemma and the S-Proce-
dure: A Historical Essay // Autom. Remote Control. 2006. V. 67. No. 11. P. 1768-
1810.
79
10.
Поляк Б.Т., Хлебников М.В., Щербаков П.С. Управление линейными система-
ми при внешних возмущениях: Техника линейных матричных неравенств. М.:
ЛЕНАНД, 2014.
11.
Каменецкий В.А. Абсолютная устойчивость дискретных систем управления с
нестационарными нелинейностями // Аит. 1985. № 8. С. 172-176.
12.
Якубович В.А. Абсолютная устойчивость импульсных систем с несколькими
нелинейными или линейными нестационарными блоками. I, II // АиТ. 1967.
№ 9. С. 59-72; 1968. № 2. С. 81-101.
Yakubovich V.A. Absolute Stability of Pulsed Systems with Several Nonlinear or
Linear but Nonstationary Blocks. I, II // Autom. Remote Control. 1967. V. 28.
No. 9. P. 1301-1313; 1968. V. 29. No. 2. P. 244-263.
13.
Шепелявый А.И. Абсолютная неустойчивость нелинейных амплитудно-импульс-
ных систем управления. Частотные критерии // АиТ. 1972. № 6. 49-56.
Shepel’yavi A.I. Absolute Instability of Nonlinear Pulse-Amplitude Control Systems.
Frequency Criteria // Autom. Remote Control. 1972. V. 33. No. 6. P. 929-935.
14.
Каменецкий В.А. Частотные условия устойчивости гибридных систем // АиТ.
2017. № 12. С. 3-25.
Kamenetskiy V.A. Frequency-Domain Stability Conditions for Hybrid Systems //
Autom. Remote Control. 2017. V. 78. No. 12. P. 2101-2119.
15.
Молчанов А.П. Функции Ляпунова для нелинейных дискретных систем управ-
ления // АиТ. 1987. № 6. С. 26-35.
Molchanov A.P. Lyapunov Functions for Nonlinear Discrete-Time Control Sys-
tems // Autom. Remote Control. 1987. V. 48. No. 6. P. 728-736.
16.
Kamenetskiy V. Stability Conditions for Systems with Switching Between Four Lin-
ear Discrete Subsystems / Proceedings of the 15th International Conference “Sta-
bility and Oscillations of Nonlinear Control Systems” (Pyatnitskiy’s Conference)
(STAB-2020, Moscow). New York: IEEE Catalog Number CFP20E79-ART, 2020.
17.
Баландин Д.В., Коган М.М. Синтез законов управления на основе линейных
матричных неравенств. М.: ФИЗМАТЛИТ, 2007.
Статья представлена к публикации членом редколлегии П.В. Пакшиным.
Поступила в редакцию 21.02.2022
После доработки 28.04.2022
Принята к публикации 10.06.2022
80