Автоматика и телемеханика, № 9, 2022
Нелинейные системы
© 2022 г. В.А. МОЗЖЕЧКОВ, д-р техн. наук (v.a.moz@yandex.ru)
(Тульский государственный университет)
СИНТЕЗ ПРОСТЫХ РЕЛЕЙНЫХ РЕГУЛЯТОРОВ
АВТОКОЛЕБАТЕЛЬНЫХ СИСТЕМ УПРАВЛЕНИЯ
Рассматривается задача синтеза релейных регуляторов с простой
структурой в составе автоколебательной системы с линейным объектом
управления. Структура регулятора считается простой, если ее невозмож-
но упростить, поскольку упрощение, состоящее в исключении из нее лю-
бого элемента, приводит к невозможности выполнить все требования,
предъявляемые к системе. Необходимо обеспечить наличие в системе ав-
токолебаний с заданной частотой и амплитудой и приблизить ее поведе-
ние к желаемому. Предложен метод решения рассматриваемой задачи.
Ключевые слова: структурный синтез, автоколебания, релейный регуля-
тор.
DOI: 10.31857/S0005231022090045, EDN: AIMROJ
1. Введение
Релейные регуляторы отличаются от непрерывных ступенчатым измене-
нием формируемой ими кусочно-постоянной управляющей величины, кото-
рая может принимать только два или три значения. Им часто отдают пред-
почтение в сравнении с непрерывными регуляторами, в частности, благодаря
простоте их технической реализации, низкой стоимости и высокой надежно-
сти. Управляющая величина, формируемая в таких регуляторах, является
выходом релейного элемента, основанного на применении, например, элек-
тронных или электромагнитных ключей, пневматических или гидравличе-
ских запорных клапанов.
Важным и широко распространенным классом систем управления с ре-
лейным регулятором являются релейные автоколебательные системы. В них
автоколебания являются установившимся рабочим режимом, в котором ре-
гулируемая величина колеблется в окрестности требуемого значения в допу-
стимом для целей регулирования диапазоне. Релейные системы в ряде слу-
чаев способны обеспечить лучшие динамические свойства по сравнению с
иными типами систем управления. При малых отклонениях регулируемой
величины от требуемого значения поведение таких систем с приемлемой точ-
ностью аппроксимируется линейными динамическими моделями, что интер-
претируют как результат линеаризации автоколебаниями релейного элемен-
81
та системы управления. Это позволяет для синтеза таких систем использо-
вать понятийный аппарат и математические методы теории линейных систем
управления.
Релейным автоколебательным системам управления посвящено значитель-
ное число публикаций, их обзор представлен, в частности, в [1-6]. В большей
части они посвящены методам анализа таких систем. Наиболее широко рас-
пространенным методом анализа автоколебательных систем управления яв-
ляется метод гармонической линеаризации [5-7]. Методы синтеза, излагаемые
в [2, 3, 8, 9], различаются главным образом математическим инструментари-
ем определения частоты, амплитуды автоколебаний и свойств синтезируе-
мой системы. Используемая в них процедура синтеза предполагает задание
фиксированной структуры регулятора и выбор значений его параметров на
основе оптимизационных методов нелинейного программирования с целью
придания синтезируемой системе желаемых свойств. Такой подход к синте-
зу системы обладает рядом недостатков. Во-первых, в таком случае реша-
ется задача параметрического, но не структурного синтеза. Как следствие,
конструктор системы, получив решение, не располагает информацией о том,
насколько оно выигрышно или проигрышно в сравнении с решениями, осно-
ванными на применении альтернативных структур. В частности, при этом не
удается получить ответ на вопрос об отсутствии либо наличии избыточности
в структуре регулятора. Во-вторых, методы нелинейного программирования
не гарантируют нахождение решения, достаточно близкого к оптимальному.
Для их эффективной работы необходимо задание хорошего начального при-
ближения значений параметров регулятора к оптимальным. Получив реше-
ние, конструктор не знает, насколько оно близко к глобально оптимальному.
В-третьих, указанный выше подход к синтезу требует больших вычислитель-
ных затрат, что ограничивает размерность решаемых задач и, как следствие,
сужает сферу его применения.
Рассматриваемая в настоящей работе математическая постановка задачи
и предлагаемый метод ее решения обладают перечисленными ниже положи-
тельными отличиями.
1. Структура регулятора определяется в результате решения задачи син-
теза и исходно считается неизвестной. В статье показана возможность авто-
матически находить структуры релейных регуляторов, обеспечивающие ре-
шение задачи синтеза и не обладающие избыточностью, т.е. простые струк-
туры [10], при этом производится исчерпывающий анализ возможных вари-
антов структур.
2. Процедура синтеза сводится в основном к решению систем линейных
алгебраических уравнений и неравенств, что позволяет использовать эффек-
тивные методы линейной алгебры, которые по сравнению с методами нели-
нейного программирования гарантируют нахождение точного решения по-
ставленной задачи и не требуют задания начальных приближений.
82
3. Предлагаемый метод синтеза релейных регуляторов автоколебательных
систем позволяет решать задачи большой размерности в короткое время с
высокой точностью.
2. Постановка задачи
Объект управления описывается системой уравнений
(1)
x = Ax + Bu,
(2)
y = Cx,
где x вектор состояния объекта управления, x = dx/dt, t
время, u
скалярное управляющее воздействие, y вектор выходов, все его компонен-
ты могут использоваться в регуляторе в качестве сигналов обратных связей,
его первая компонента y1 регулируемая переменная является выходом
синтезируемой системы, значения переменных t, u, элементов векторов x, y,
элементов заданных постоянных матриц A, C и вектора B действительные
числа, пара (A, B) является управляемой, а пара (A, C) наблюдаемой.
Регулятор описывается системой уравнений
(3)
Ż=Azz-Byy+Bg
g,
(4)
u∗ = Czz - Dyy + Dg
g,
(5)
u = Usgn(u∗
).
Уравнения (3), (4) [11-14] описывают линейную часть регулятора. В них
z
вектор состояния регулятора, Ż = dz/dt, g скалярное задающее воз-
действие (вход системы), u∗ скалярный выход линейной части регулятора,
значения переменных u∗, g, элементов вектора z, элементов постоянных век-
торов Bg, Dg и матриц Az, By, Cz, Dy действительные числа. Уравнение (5)
описывает релейный элемент (реле) регулятора, sgn(·) функция знака, u
выход регулятора. Амплитуду U выхода реле, частоту ω0 и амплитуду U∗
автоколебаний на входе реле считаем заданными положительными действи-
тельными числами.
Из системы (1), (2), используя преобразование Лапласа, получим уравне-
ние
(6)
a(p)y(p) = b(p)u(p),
отражающее зависимость изображения y(p) вектора выходов объекта управ-
ления от изображения u(p) управляющего воздействия, в нем a(p) харак-
теристический полином объекта управления, b(p)
вектор, компоненты
которого полиномы числителей передаточных функций (ПФ) y(p)/u(p),
p переменная преобразования Лапласа.
Из (3), (4) аналогично [11-13] получим уравнение, отражающее зависи-
мость изображения u∗(p) выхода линейной части регулятора от изображе-
83
ния g(p) задающего воздействия и от изображения y(p) вектора выходов:
(7)
r(p)u∗(p) = qg(p)g(p) - ℓ⊤
(p)y(p),
где r(p) характеристический полином линейной части регулятора, qg(p)
числитель ПФ линейной части регулятора по задающему воздействию, ℓ(p)
вектор, компоненты которого полиномы числителей ПФ линейной части
регулятора по сигналам обратных связей. Считаем, что задан нижний пре-
дел µ допустимых значений индекса (относительной степени) ПФ линейной
части регулятора.
Пусть задана ПФ W∗(p) = h∗g(p)/h∗s(p), определяющая желаемое поведение
системы (1)-(5), в ней
deg(h∗g(p)) ≤ deg(h∗s(p)),
deg(h∗s(p)) ≥ deg(a(p))(1 + 1/dim(y)) + µ - 3,
h∗g(p) = h′g(p)b1(p),
h∗s(p) гурвицев полином, deg(·) степень полинома (целое число), dim(·)
размерность вектора.
Требуется выбрать значения коэффициентов линейной части (3), (4) регу-
лятора так, чтобы в системе (1)-(5) имели место автоколебания с частотой ω0
и амплитудой U∗, а ее реакция y1(t) на каждое задающее воздействие g(t)
из назначенного набора была достаточно близкой к реакции yL(t) на то
же воздействие линейной стационарной системы с ПФ yL(p)/g(p) = W∗(p).
Структура регулятора должна быть простой, что означает [10] присутствие
в ней только тех коэффициентов, выбор отличных от нуля значений ко-
торых необходим и достаточен для придания системе требуемых свойств.
Необходимо найти структуры регуляторов, соответствующие перечисленным
требованиям.
3. Метод решения
Следуя методу гармонической линеаризации [5-7] и принимая свойствен-
ные ему допущения, заменим описание реле регулятора (5) приближенным
описанием:
(8)
u(p) = Ku∗
(p),
где K коэффициент гармонической линеаризации реле. Известно [5], что
для рассматриваемого двухпозиционного реле в установившемся режиме ав-
токолебаний
(9)
K = 4U/(πU∗
).
Согласно (9) значение K однозначно определено заданными значениями U
иU∗.
Из (6)-(8) следуют уравнения [11-13], отражающие зависимость изобра-
жения y1(p) выхода гармонически линеаризованной системы (ГЛС) от изоб-
84
ражения g(p) задающего воздействия:
(10)
hs(p)y1(p) = hg
(p)g(p),
(11)
hg(p) = b1(p)qg
(p)K,
(12)
hs(p) = a(p)r(p) + ℓ⊤
(p)b(p)K,
где hs(p) и hg(p) характеристический полином и полином числителя ПФ
ГЛС, значение K считаем постоянным, равным его значению в установив-
шемся режиме автоколебаний.
Из (11), полагая hg(p) = h∗g(p), получим
(13)
qg(p) = h′g
(p)/K.
Для существования в системе (1)-(5) автоколебаний с частотой ω0 соглас-
но методу гармонической линеаризации [5-7] необходимо обеспечить нали-
чие у полинома hs(p) пары чисто мнимых корней ±jω0 и отрицательность
действительной части остальных корней. Для приближения реакции y1(t) на
задающие воздействия системы (1)-(5) к реакции yL(t) на те же воздействия
системы с ПФ W∗(p) = h∗g(p)/h∗s(p) необходимо, чтобы полином hs(jω) был
близок к h∗s(jω). Для выполнения указанных условий обеспечим равенство
(14)
hs(p) = h∗s(p)(p2/ω20
+ 1),
которое в силу свойств полиномов h∗s(p) и (p2/ω20 + 1) гарантирует наличие
у hs(p) требуемых корней и обеспечивает близость полинома hs(jω) к по-
линому h∗s(jω) в области значений ω меньших, чем ω0, т.е в области частот
полезных сигналов.
Приравняв правые части (12) и (14), получим уравнение
(15)
a(p)r(p) + ℓ⊤(p)b(p)K = h∗s(p)(p2/ω20
+ 1),
которое с учетом (9) позволяет определить r(p) и ℓ(p), обеспечивающие вы-
полнение необходимых условий существования автоколебаний с частотой ω0 и
амплитудой U∗, а также близость полиномов hs(jω), h∗s(jω) в области частот
полезных сигналов. Уравнение (15) линейно относительно r(p) и ℓ(p) и сво-
дится [11-13] в результате приравнивания коэффициентов при одинаковых
степенях переменной p к системе линейных уравнений
(16)
Gα = h,
где вектор неизвестных α составлен из коэффициентов искомых полино-
мов, а вектор h из коэффициентов полинома h∗s(p)(p2/ω20 + 1). Элементы
матрицы G числа, определяемые значениями коэффициентов полиномов
объекта управления (6) и значением коэффициента K. Матрица G име-
ет [13] σ + deg(a(p)) + 1 строк и σ + 1 + (σ + 1 - µ)dim(y) столбцов, где σ =
= deg(r(p)) порядок регулятора. Для совместности системы (16) необходи-
мо, чтобы число строк матрицы G было равно размерности вектора h, откуда
85
следует требование
(17)
σ = deg(h∗s
(p)) - deg(a(p)) + 2.
Равенство (17) однозначно определяет порядок регулятора σ, поскольку
значения deg(h∗s(p)), deg(a(p)) однозначно определены в исходных данных
решаемой задачи.
Для того чтобы система (16) имела не менее, чем одно решение, необходи-
мо, чтобы в матрице G число столбцов было больше или равно числу строк,
что эквивалентно условию [13]
(18)
σ ≥ deg(a(p))/dim(y) + µ - 1.
Совместность требований (17), (18) достигается выполнением при назна-
чении ПФ W∗(p) = h∗g(p)/h∗s(p) условия
deg(h∗s(p)) ≥ deg(a(p))(1 + 1/dim(y)) + µ - 3.
Максимальную структуру [10] линейной части регулятора опишем уравне-
нием (7), в котором порядок σ = deg(r(p)) линейной части регулятора выбран
согласно (17), deg(ℓk(p)) = σ - µ, k = 1, . . . , dim(y), deg(qg(p)) = σ - µ, а зна-
чения всех коэффициентов полиномов могут свободно выбираться. Макси-
мальной структуре соответствует система (16), решения которой будем ис-
пользовать для определения r(p) и ℓ(p). Она, согласно теореме Кронекера-
Капелли, совместна тогда и только тогда, когда ранг ее матрицы G ра-
вен рангу ее расширенной матрицы, т.е. когда rank (G) = rank (G|h). Если
rank (G) = rank (G|h) = dim(α), система (16) имеет единственное решение,
однозначно определяющее r(p) и ℓ(p), при этом максимальная структура
не избыточна и соответствует определению простой структуры [10]. Если
rank (G) = rank (G|h) < dim(α), максимальная структура избыточна и систе-
ма (16) имеет бесконечное множество решений. Для выделения конечного
множества предпочтительных решений и исключения избыточности в струк-
туре регулятора потребуем, чтобы решение было простым [10] или, что эк-
вивалентно, чтобы решение имело простую структуру [10]. Для нахождения
решений системы (16) с простой структурой (простых решений), однозначно
определяющих r(p) и ℓ(p), можно воспользоваться алгоритмом, изложенным
в [10].
Будем рассматривать случай, когда допустимо ограниченное отклонение
коэффициентов полинома hs(p) от их заданных значений. Для выполнения
при этом требования равенства частоты автоколебаний заданному значению
добавим в (16) два уравнения, описывающие условие равенства нулю при
p = ±jω0 мнимой и действительной частей полинома, представленного в пра-
вой части уравнения (12), и сформируем векторы h-, h+, определяющие диа-
пазоны допустимых значений компонент вектора h. Требование (16) замеща-
ется условием
(19)
h- ≤ Gα ≤ h+.
86
Для поиска простых решений системы (19) будем использовать метод, изло-
женный в [10].
Для устойчивости автоколебаний в системе (1)-(5) необходимо, чтобы
при положительном приращение амплитуды U∗ размах колебаний убывал,
а при отрицательном увеличивался, стремясь к значению U∗. Из представ-
ленного условия следует критерий устойчивости автоколебаний [6, с. 229],
применяемый в методе гармонического баланса: характеристический поли-
ном ГЛС (12), при подстановке в него возмущенного значения K, соответ-
ствующего согласно (9) значению амплитуды U∗ + ΔU∗, ΔU∗ > 0, должен
быть гурвицевым, а в случае ΔU∗ < 0 должен иметь корень с положитель-
ной вещественной частью. Указанный критерий устойчивости выражается
формулой
(20)
ρ(hs(p, U∗ + ε)) < 0, ρ(hs(p, U∗
− ε)) > 0,
где ρ(·) максимальное значение действительной части корней (спектраль-
ный радиус) полинома, ε малое положительное число. Более строгий крите-
рий устойчивости автоколебаний [15, c. 227; 16, c. 238] состоит в выполнении
условия
(21)
(ΨRu/ΨRω - ΨIu/ΨIω)/(ΨIξ /ΨIω - ΨRξ/ΨRω
) < 0,
в котором
ΨRu = ∂Re (hs (ξ + jω0,U∗))/∂U∗; ΨRξ = ∂Re (hs (ξ + jω0,U∗)) /∂ξ;
δΨRω = ∂Re (hs (ξ + jω0,U∗))/∂ω0;
ΨIu = ∂Im (hs (ξ + jω0,U∗))/∂U∗; ΨIξ = ∂Im (hs (ξ + jω0,U∗))/∂ξ;
δΨIω = ∂Im (hs (ξ + jω0,U∗)) /∂ω0,
все производные берутся при ξ = 0.
Решение рассматриваемой задачи выполняется в следующей последова-
тельности. Согласно (13) находим полином qg(p). Находим r(p) и ℓ(p), решая
соответствующую максимальной структуре систему (16) либо (19) при помо-
щи методов поиска простых решений систем уравнений и неравенств, предло-
женных в [10]. Из множества вариантов регуляторов, соответствующих най-
денным qg(p), r(p), ℓ(p), исключаются те, которые не обеспечивают выполне-
ние условий устойчивости (20), (21). Для оставшихся вариантов проводится
проверка их приемлемости численными методами с использованием системы
уравнений (1)-(5) (проверяется наличие автоколебаний с частотой ω0 и ам-
плитудой U∗, близкой к заданным значениям, а также близость реакции y1(t)
на задающие воздействия системы (1)-(5) к реакции yL(t) на те же воздей-
ствия системы с ПФ yL(p)/g(p) = W∗(p)). Регуляторы, успешно прошедшие
указанную проверку, составляют искомое множество регуляторов с простой
структурой.
87
4. Примеры
Пример 1. Решим задачу синтеза простых релейных регуляторов авто-
колебательной системы управления электроприводом. Объект управления,
включающий в себя двигатель постоянного тока с неизменным потоком
возбуждения, редуктор и инерционную нагрузку, описывается уравнениями
(1)-(2), в которых
0
1
0
0
1/kr
0
0
0
0
Cm/J
0
0
1
0
A=
B=
C =
,
,
,
0
-Ce/L -R/L
1/L
0
0
1
где R, L
сопротивление и индуктивность якорной обмотки двигателя;
Ce, Cm коэффициент противо ЭДС и коэффициент момента двигателя;
kr
коэффициент передачи редуктора; J
момент инерции подвижных
частей, приведенный к валу двигателя. В международной системе единиц:
R = 0,475; L = 5,7 · 10-4; Ce = Cm = 6,83 · 10-2; kr = 2; J = 9,43 · 10-5. Век-
тор состояний x = (x1, x2, x3), где x1 и x2
угловое положение и угловая
скорость вращения вала двигателя, x3 ток в якорной обмотке. Вектор выхо-
дов y = (y1, y2, y3) = (x1/kr, x2, x3), в нем y1 угловое положение выходного
вала электропривода является выходом синтезируемой системы. Управляю-
щим воздействием u является напряжение на якорной обмотке, его амплитуда
U = 27 В. Назначим U∗ = 4U/(100π), что согласно (9) соответствует значе-
нию K = 100. Полагаем µ = 0.
Электропривод должен соответствовать следующим требованиям:
1) амплитуда ε автоколебаний регулируемой переменной y1 должна быть
не более 0,5 мрад;
2) при единичном ступенчатом воздействии g1(t) перерегулирование долж-
но быть не более 15%, время переходного процесса не более 0,075 с (время,
после которого модуль ошибки регулирования не превышает 0,01 рад); уста-
новившееся значение y1(t) должно быть равно 1 ± ε;
3) при воздействии g2(t), возрастающем с постоянной скоростью 5 градусов
в секунду, установившееся значение ошибки регулирования должна быть не
более 1 + ε мрад.
Из анализа амплитудно-частотных характеристик объекта управления
следует, что требование к амплитуде автоколебаний (ε ≤ 0,5 мрад) обеспе-
чивается, если частота автоколебаний ω0 ≥ 6 · 103 рад/c, поэтому принимаем
ω0 = 6 · 103 рад/c.
Заданные требования к точности отработки задающих воздействий
g1(t), g2(t) выполняются, если реакция y1(t) привода на эти воздействия
будет близкой к реакции yL(t) линейной системы, описываемой ПФ W∗(p) =
= yL(p)/g(p) = h∗g(p)/h∗s(p), в которой h∗g(p) = 7,84 · 10-3p + 1, h∗s(p) = p3/ω3s+
+1,44 · 10-4p2 + 1,69 · 10-2p + 1, ωs = 118. Корни h∗s(p):
(-118, 0 · j),
(-59, ±102 · j). Значения коэффициентов и степени полиномов h∗g(p), h∗s(p)
88
выбраны из условия выполнения требований к точности отработки задающих
воздействий, а также из условия минимизации значения ωs, традиционно
используемого при выборе желаемой ПФ [6, с. 99] с целью минимизации
потребной полосы пропускания системы и, таким образом, потребной
области частот полезных сигналов. Получено значение ωs ≪ ω0. Степени
полиномов h∗g(p), h∗s(p) последовательно наращивались начиная с единицы
до значений, при которых удается выполнить все требования к системе.
Степень полинома h∗s(p) обеспечивает совместность условий (17),
(18).
Допустимо отклонение ω0 и U∗ от заданных значений не более чем на ±10%
и ±15%. Среднеквадратическое отклонение y1(t) от yL(t) при воздействиях
g1(t), g2(t) не должно превышать 1%. Завершив постановку задачи синтеза,
приступим к ее решению.
Поскольку deg(h∗s(p)) = 3, то из (17) находим σ = 2.
Из (1), (2) получаем уравнение (6), в котором
a(p) = p3/Q + R/(LQ)p2 + Cep, b(p) = (1/kr , p, p2/(LQ)),
где Q = Cm/(JL).
Из равенства h∗g(p) = h′g(p)b1(p) следует:
(
)
h′g(p) = h∗g(p)kr =
7,84 · 10-3p + 1
· 2.
Согласно (13) находим: qg(p) = h′g(p)/K = 15,68 · 10-5p + 2 · 10-2.
Значения r(p) и ℓ(p) найдем, решив систему (16), соответствующую мак-
симальной структуре регулятора с σ = 2. В ней вектор неизвестных будет
α = (ℓ10,ℓ11,ℓ12, ℓ20,ℓ21,ℓ22, ℓ30,ℓ31,ℓ32, r0,r1,r2)⊤, где ℓki
коэффициент
при сомножителе pi в полиноме ℓk(p), являющимся k-й компонентой векто-
ра ℓ(p); r0, r1, r2
коэффициенты полинома r(p). Ее матрица
K
0
0
0
0
0
0
0
0
0
0
0
kr
K
0
0
K 0
0
0
0
0
Ce
0
0
kr
K
K
R
0
0
0
K 0
0
0
Ce
0
kr
(LQ)
(LQ)
G=
K
R
0
0
0
0
0
K
0
0
1/Q
Ce
(LQ)
(LQ)
K
1
R
0
0
0
0
0
0
0
0
0
(LQ)
Q (LQ)
1
0
0
0
0
0
0
0
0
0
0
0
Q
Вектор ее правой части
(
)
h=
1, 1,69 · 10-2, 1,44 · 10-4, 6,00 · 10-7 , 3,83 · 10-12, 1,62 · 10-14
89
а y
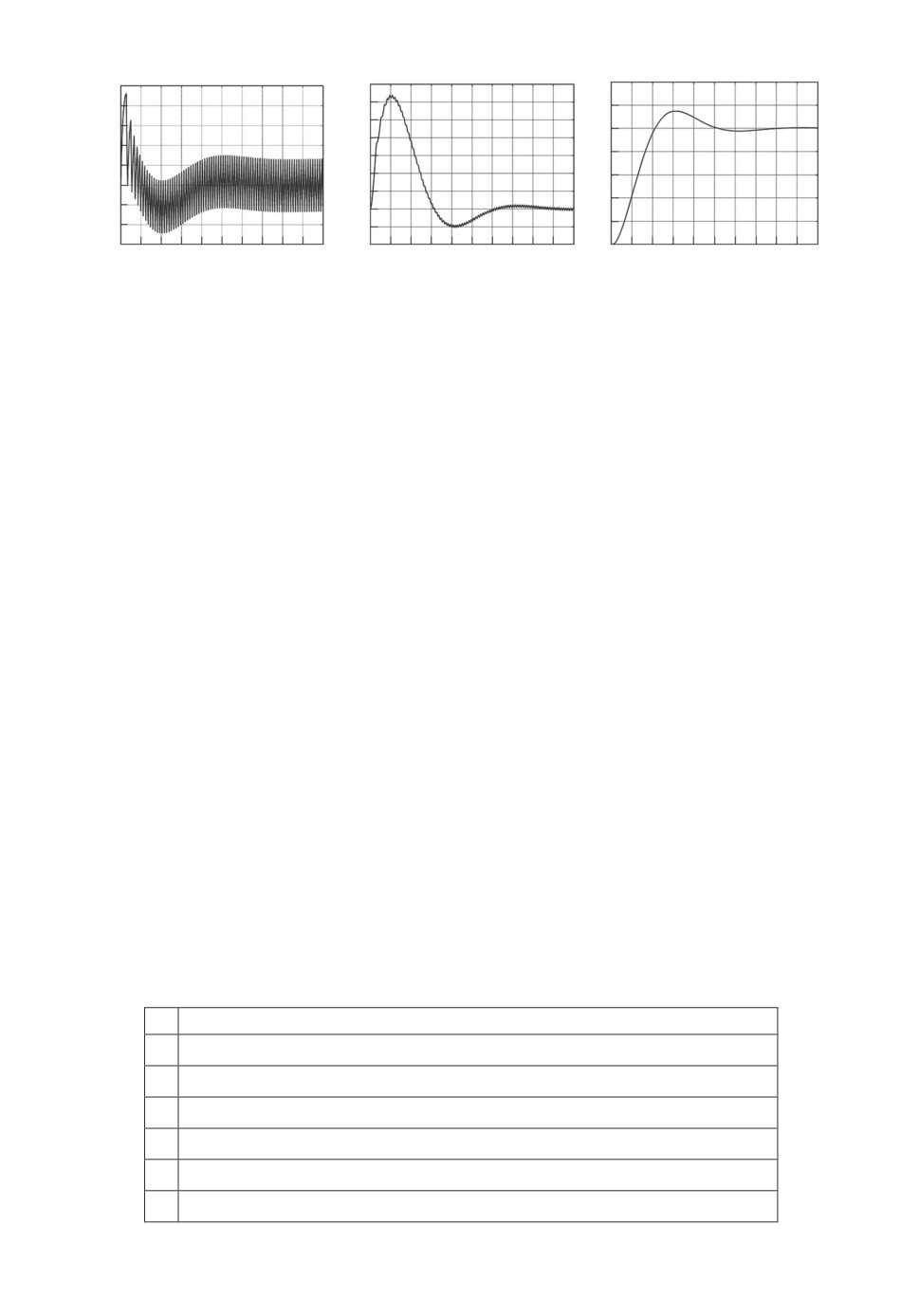
3
(t)
б y
2
(t)
в y1(t)
y3
y2
y1
40
120
1,2
1,0
80
20
0,8
40
0,6
0
0,4
0
-20
0,2
-40
0
0,02 0,04 0,06 0,08 0,10
0
0,02 0,04 0,06 0,08 0,10
0
0,02 0,04 0,06 0,08 0,10
t
t
t
Рис. 1. Графики реакции системы (1)-(5) с регулятором № 1(табл. 1) на еди-
ничное ступенчатое воздействие.
составлен из коэффициентов полинома h∗s(p)(p2/ω20 + 1). Система (16) име-
ет не единственное решение, поскольку в ней rank (G) = rank (G|h) = 6 <
< dim(α) = 12. Согласно [10] находим простые решения системы (16), опре-
деляющие r(p), ℓ(p). Им соответствует hs(p), имеющий корни (0, ±6000 · j),
(-118, 0 · j), (-59, ±102 · j), удовлетворяющие условию существования ав-
токолебаний с частотой ω0 = 6000 рад/с. Найденные полиномы qg(p), r(p),
ℓk(p), k = 1,... ,3 определяют варианты регуляторов, для которых проводим
проверку условий устойчивости (20), (21) и проверку соответствия системы
(1)-(5) назначенным требованиям. Уравнения линейной части регуляторов с
простой структурой, успешно прошедших указанные проверки, представлены
в табл. 1.
На рис. 1 представлены графики реакции системы (1)-(5) с релейным ре-
гулятором, линейная часть которого описывается уравнением, представлен-
ным вариантом № 1 в табл. 1, на единичное ступенчатое воздействие. Для
указанного варианта отклонение параметров ω0 и U∗ от заданных значений
составляет -9 и +15%, среднеквадратическое отклонение y1(t) от yL(t) при
отработке воздействий g1(t), g2(t) не превышает 0,3%, графики реакций y1(t),
yL(t) на единичное ступенчатое воздействие в данном случае визуально нераз-
личимы.
Пример 2. Допустим возможность ослабления требования минимизации
потребной полосы пропускания системы в задаче примера 1, заменив равен-
Таблица 1
№
Уравнение линейной части регулятора
1
r2p2u∗ = (qg0 + qg1p)g - (ℓ10 + ℓ11p + ℓ12p2)y1 - ℓ22p2y2 - ℓ32p2y3
2
r2p2u∗ = (qg0 + qg1p)g - (ℓ10 + ℓ11p)y1 - (ℓ21p + ℓ22p2)y2 - ℓ32p2y3
3
r2p2u∗ = (qg0 + qg1p)g - (ℓ10 + ℓ11p)y1 - (ℓ30 + ℓ31p + ℓ32p2)y3
4
r2p2u∗ = (qg0 + qg1p)g - (ℓ10 + ℓ11p)y1 - ℓ21py2 - (ℓ31p + ℓ32p2)y3
5
r2p2u∗ = (qg0 + qg1p)g - (ℓ10 + ℓ11p + ℓ12p2)y1 - (ℓ31p + ℓ32p2)y3
6
r2p2u∗ = (qg0 + qg1p)g - ℓ10y1 - (ℓ20 + ℓ21p + ℓ22p2)y2 - ℓ32p2y3
90
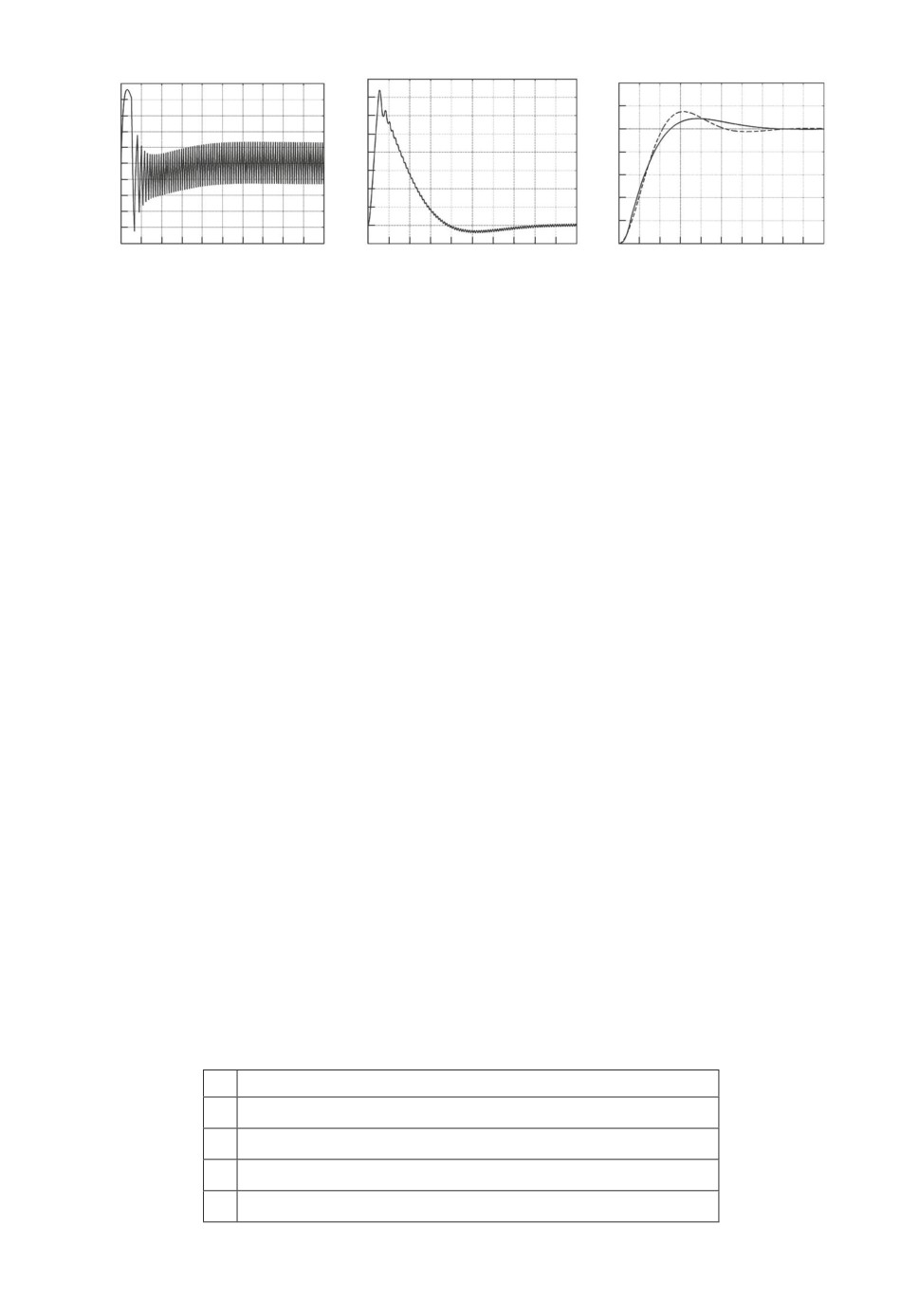
а y3(t)
б y
2
(t)
в y1(t)
y3
y2
y1
40
1,2
120
20
1,0
80
0,8
0
0,6
40
-20
0,4
0,2
-40
0
0
0,02 0,04 0,06 0,08 0,10
0
0,02 0,04 0,06 0,08 0,10
0
0,02 0,04 0,06 0,08 0,10
t
t
t
Рис. 2. Графики реакции системы (1)-(5) с регулятором № 1(табл. 2) на еди-
ничное ступенчатое воздействие, на рис. 2,в пунктиром показан график реак-
ции yL(t) на единичное ступенчатое воздействие системы с ПФ W∗(p).
ство ωs = 118 условием 118 ≤ ωs ≤ 700, что эквивалентно условию 3 · 10-9 ≤
≤ h∗s3 ≤ 6 · 10-7. Требования к остальным коэффициентам h∗s(p) остаются
неизменными, в таком случае полином h∗s(p) остается гурвицевым, система
с ПФ W∗(p) отрабатывает контрольные воздействия с заданной точностью.
Увеличим до 5% допустимое среднеквадратическое отклонение y1(t) от yL(t)
при отработке контрольных воздействий системой (1)-(5). В данном случае
система уравнений (16) замещается неравенствами (19). Согласно [10] нахо-
дим простые решения системы (19), определяющие r(p), ℓ(p). Им соответ-
ствует hs(p), имеющий корни (0, ±6000 · j), (-5,3 · 104, 0 · j), (-59, ±61 · j),
удовлетворяющие необходимому условию существования автоколебаний с ча-
стотой ω0 = 6000 рад/с. Полиномы qg(p), r(p), ℓk(p), k = 1, . . . , 3 определяют
варианты регуляторов, для которых проводим проверку условий устойчиво-
сти (20), (21) и проверку соответствия системы (1)-(5) назначенным требова-
ниям. Уравнения линейной части регуляторов с простой структурой, успешно
прошедших указанные проверки, представлены в табл. 2.
Из сопоставления табл. 1 и 2 следует, что результатом расширения диапа-
зона допустимых значений hs3 явилось сокращение на единицу числа коэф-
фициентов в уравнении регулятора.
На рис. 2 представлены графики реакции системы (1)-(5) с релейным ре-
гулятором, линейная часть которого описывается уравнением, представлен-
ным вариантом № 1 в табл. 2, на единичное ступенчатое воздействие. Для
указанного варианта отклонение параметров ω0 и U∗ от заданных значений
Таблица 2
№
Уравнение линейной части регулятора
1
r1p + r2p2u∗ = (qg0 + qg1p)g - (ℓ10 + ℓ11p + ℓ12p2)y1
2
r1p + r2p2u∗ = (qg0 + qg1p)g - (ℓ10 + ℓ11p)y1 - ℓ21py2
3
r1p + r2p2u∗ = (qg0 +qg1p)g -(ℓ10 +ℓ12p2)y1 -ℓ20py2
4
r1p + r2p2u∗ = (qg0 + qg1p)g - ℓ10y1 - (ℓ20 + ℓ21p2)y2
91
составляет -5 и +12%, среднеквадратическое отклонение y1(t) от yL(t) при
отработке воздействий g1(t), g2(t) не превышает 4,5%.
5. Заключение
В статье предложен новый подход к синтезу релейных регуляторов с про-
стой структурой в составе автоколебательной системы с линейным объектом
управления, позволяющий автоматически находить структуры релейных ре-
гуляторов, обеспечивающие решение задачи синтеза и не обладающие избы-
точностью. При этом производится исчерпывающий анализ возможных ва-
риантов структур. Процедура синтеза сводится в основном к решению систем
линейных алгебраических уравнений и неравенств, что позволяет использо-
вать эффективные методы линейной алгебры, которые гарантируют нахож-
дение точного решения поставленной задачи и не требуют задания начальных
приближений.
СПИСОК ЛИТЕРАТУРЫ
1.
Цыпкин Я.З. Релейные автоматические системы. М.: Наука, 1974.
2.
Фалдин Н.В. Релейные системы автоматического управления // Математиче-
ские модели, динамические характеристики и анализ систем автоматического
управления / Под ред. К.А. Пупкова, Н.Д. Егупова. М.: Изд-во МГТУ. 2004.
3.
Boiko I. Discontinuous Control Systems. Boston: Birkhauser, 2009.
4.
Boiko I.M., Kuznetsov N.V., Mokaev R.N., Akimova E.D. On asymmetric peri-
odic solutions in relay feedback systems // J. Franklin Institut. 2021. V. 358. (1).
P. 363-383.
5.
Попов Е.П., Пальтов И.П. Приближенные методы исследования нелинейных
автоматических систем. М.: Физматгиз, 1960.
6.
Первозванский А.А. Курс теории автоматического управления. М.: Наука, 1975.
7.
Леонов Г.А. О методе гармонической линеаризации // АиT. 2009. № 5. С. 65-75.
Leonov G.A. On the method of harmonic linearization // Autom. Remote Control.
2009. V. 70. No. 5. P. 800-810.
8.
Руднев С.А., Фалдин Н.В. О расширении области применимости условий устой-
чивости релейных систем // Изв. АН СССР. Техническая кибернетика. 1980.
№ 5. С. 193-196.
9.
Фалдин Н.В., Руднев С.А. Синтез релейных систем методом фазового годогра-
фа // Изв. Вузов. Приборостроение. 1982. № 7. С. 32-36.
10.
Мозжечков В.А. Синтез линейных регуляторов с простой структурой // АиТ.
2003. № 1. С. 27-41.
Mozzhechkov V.A. Design of Simple-Structure Linear Controllers // Autom. Remote
Control. 2003. V. 64. No. 1. P. 23-36.
11.
Гайдук А.Р. Синтез систем автоматического управления по передаточным функ-
циям // АиТ. 1980. № 1. С. 11-16.
Gajduk A.R. Design of control systems from transfer functions // Autom. Remote
Control. 1980. V. 41. No. 1. P. 6-11.
92
12. Гайдук А.Р. О синтезе систем управления при заданной форме воздействий //
АиТ. 1984. № 6. С. 13-20.
Gajduk A.R. On design of control systems with a specified form of exogenous sig-
nals // Autom. Remote Control. 1984. V. 45. No. 6. P. 692-699.
13. Гайдук А.Р. Выбор обратных связей в системе управления минимальной слож-
ности // АиТ. 1990. № 5. С. 29-37.
Gajduk A.R. Choice of feedbacks in a control system of minimal complexity // Au-
tom. Remote Control. 1990. V. 51. No. 5. P. 593-600.
14. Воевода А.А., Чехонадских А.В. Оптимизация расположения полюсов системы
управления с регулятором пониженного порядка // Автометрия. 2009. Т. 4. № 5.
С. 113-123.
15. Пановко Я.Г. Введение в теорию механических колебаний. М.: Наука, 1971.
16. Горяченко В.Д. Элементы теории колебаний. М.: Высшая школа, 2001.
Статья представлена к публикации членом редколлегии С.А. Красновой.
Поступила в редакцию 16.11.2021
После доработки 25.05.2022
Принята к публикации 10.06.2022
93