Автоматика и телемеханика, № 1, 2023
Нелинейные системы
© 2023 г. А.Ю. АЛЕКСАНДРОВ, д-р физ.-мат. наук
(a.u.aleksandrov@spbu.ru)
(Санкт-Петербургский государственный университет;
Институт проблем машиноведения РАН, Санкт-Петербург)
А.А. ТИХОНОВ, д-р физ.-мат. наук (a.tikhonov@spbu.ru)
(Санкт-Петербургский государственный университет)
АНАЛИЗ УСТОЙЧИВОСТИ МЕХАНИЧЕСКИХ СИСТЕМ
С СУЩЕСТВЕННО НЕЛИНЕЙНЫМИ ПОЗИЦИОННЫМИ
СИЛАМИ ПРИ НАЛИЧИИ РАСПРЕДЕЛЕННОГО
ЗАПАЗДЫВАНИЯ1
Рассматриваются механические системы с линейными скоростными си-
лами и существенно нелинейными позиционными силами, содержащими
слагаемые с распределенным запаздыванием. С помощью прямого метода
Ляпунова и метода декомпозиции устанавливаются условия асимптотиче-
ской устойчивости положений равновесия изучаемых систем. Разработан-
ные подходы применяются для решения задачи одноосной стабилизации
твердого тела. Приводятся результаты численного моделирования, под-
тверждающие выводы, полученные аналитически.
Ключевые слова: механические системы, распределенное запаздывание,
устойчивость, декомпозиция, функционал Ляпунова-Красовского, одно-
осная стабилизация.
DOI: 10.31857/S0005231023010014, EDN: LTXJDN
1. Введение
Проблемы исследования устойчивости движений механических систем при
заданных силах и их стабилизации при возможности использования управ-
ляющих сил актуальны в современной теории управления [1-5]. Если дей-
ствующие на систему силы существенно нелинейны, т.е. их разложения в ря-
ды по степеням обобщенных координат или скоростей не содержат линейных
членов, то одним из основных методов анализа устойчивости становится пря-
мой метод Ляпунова. В случае наличия запаздывания в системе применение
этого метода базируется или на подходе Разумихина, или на использовании
функционалов Ляпунова-Красовского [6-8]. Однако следует заметить, что
1 Результаты разделов 3 и 4 получены при финансовой поддержке Министерства науки
и высшего образования Российской Федерации (соглашение № 075-15-2021-573) в Институте
проблем машиноведения РАН.
3
для существенно нелинейных систем проблема построения функций Ляпуно-
ва и функционалов Ляпунова-Красовского значительно усложняется.
Одним из эффективных способов решения указанной проблемы являет-
ся метод декомпозиции. Метод направлен на исследование свойств решений
дифференциальных систем большой размерности на основе анализа свойств
выделяемых из нее подсистем меньших размерностей [1, 9-11]. Он широко
и успешно применяется для исследования устойчивости и стабилизации ме-
ханических систем. Например, в [12-16] метод декомпозиции использовался
для построения управлений в электромеханических и робототехнических си-
стемах, в [17] метод декомпозиции применен в задаче об отслеживании тра-
екторий механических систем, в [18] для построения управления угловой
ориентацией космического аппарата, в [2] при решении задачи о переводе
управляемой лагранжевой системы из произвольного начального состояния в
заданное конечное состояние за конечное время. В монографии [9], при рас-
смотрении механической системы, моделируемой линейными автономными
дифференциальными уравнениями 2-го порядка, было показано, что исследо-
вание ее устойчивости можно свести к исследованию устойчивости двух изо-
лированных подсистем относительно дифференциальных уравнений 1-го по-
рядка. Этот результат получил дальнейшее развитие в публикациях [19-22].
Системы с запаздыванием представляют собой одну из важных и широко
распространенных категорий динамических систем, встречающихся в меха-
нике в связи с нелинейными эффектами типа гистерезиса, эффектами па-
мяти формы материала, а также в связи с конечностью распространения
сигналов в системах управления [6-8, 23]. Кроме того, запаздывание, в част-
ности распределенное запаздывание, может намеренно вводиться в управ-
ляемые механические системы в качестве интегральной части ПИД-регуля-
тора с целью улучшения характеристик переходных процессов в таких систе-
мах [4, 24, 25].
Системы управления с распределенным запаздыванием рассматривались
в [4, 24-29], где были получены условия устойчивости на базе функциона-
лов Ляпунова-Красовского как с отрицательно определенными, так и зна-
копостоянными производными. В [30] линейные управляемые механические
системы с распределенным запаздыванием в позиционных силах изучались
на предмет устойчивости с использованием метода декомпозиции. Анализ
устойчивости опирался на предположение о наличии большого параметра в
качестве множителя при векторе сил, зависящих от обобщенных скоростей.
Новизна данной статьи проявляется как в постановке задачи, так и в под-
ходах к ее решению. Рассматривается механическая система, находящаяся
под действием позиционных сил, существенно нелинейным образом завися-
щих от обобщенных координат и содержащих слагаемые с распределенным
запаздыванием, а также от сил, линейным образом зависящих от обобщен-
ных скоростей. С использованием специальных конструкций функционалов
Ляпунова-Красовского полного типа [6] и метода декомпозиции доказаны
4
теоремы об условиях асимптотической устойчивости положений равновесия
изучаемых систем. Установлено, что, по сравнению с линейным случаем [30],
для системы с существенно нелинейными позиционными силами условия
устойчивости могут быть сформулированы в более простой и конструктивной
форме.
2. Постановка задачи
Рассмотрим механическую систему, движения которой описываются урав-
нениями
∫t
(1)
Aq(t) + B
˙q(t) + Q(q(t)) +
D(q(ξ))dξ = 0,
t-τ
где q(t) и
˙q(t) n-мерные векторы обобщенных координат и обобщенных ско-
ростей, соответственно, A и B постоянные матрицы, векторные функции
Q(q) и D(q) определены и непрерывны при q ∈ Rn, τ
постоянное поло-
жительное запаздывание. Таким образом, исследуется система с линейными
скоростными силами, в то время как позиционные силы, вообще говоря, нели-
нейны и содержат члены с распределенным запаздыванием.
Каждое решение q(t, t0, χ) системы (1) при t ≥ t0 определяется начальным
моментом времени t0 и начальной функцией χ(ξ), где t0 ≥ 0, χ(ξ) принадле-
жит пространству C1([-τ, 0], Rn) непрерывно дифференцируемых функций
с равномерной нормой ∥χ∥τ = maxξ∈[-τ,0] (∥χ(ξ)∥ + ∥χ˙(ξ)∥), а ∥ · ∥ евклидо-
ва норма вектора. Через qt(t0, χ) обозначим отрезок решения: qt(t0, χ) : ξ →
→ q(t + ξ,t0,χ), ξ ∈ [-τ,0].
Будем предполагать, что Q(0) = D(0) = 0. Значит, рассматриваемая си-
стема имеет положение равновесия
(2)
q=
˙q = 0.
Цель настоящей работы получить условия асимптотической устойчивости
этого положения равновесия.
Следует отметить, что в статье [30] такая задача решалась для случая
линейных позиционных сил. Анализ устойчивости проводился на основе раз-
работанного в [9, 19-21] подхода к декомпозиции механических систем. Одна-
ко установленные в [30] условия формулируются в терминах разрешимости
некоторой системы линейных матричных неравенств и гарантируют асимпто-
тическую устойчивость положения равновесия только при наличии большого
параметра в качестве множителя при скоростных силах.
В данной работе исследуется случай, когда позиционные силы являют-
ся существенно нелинейными. Наряду с методом декомпозиции используется
подход, основанный на построении для рассматриваемой системы функцио-
нала Ляпунова-Красовского полного типа [6] специального вида. Показыва-
ется, что, в отличие от линейного случая, для асимптотической устойчивости
5
системы с существенно нелинейными позиционными силами не требуется на-
личия большого параметра при скоростных силах, а сами условия устойчиво-
сти формулируются в более простой и конструктивной форме. Полученные
результаты применяются для решения задачи одноосной стабилизации твер-
дого тела.
3. Построение функционала Ляпунова-Красовского полного типа
Предположим, что система (1) представима в виде
∫t
∂Π(q(t))
∂Π(q(ξ))
(3)
Aq(t) + B
˙q(t) +
+ P(q(t))q(t) +
dξ = 0.
∂q
∂q
t-τ
Здесь A и B симметрические и положительно определенные матрицы, Π(q)
и Π(q) непрерывно дифференцируемые при q ∈ Rn однородные функции
порядка µ + 1 > 2, P (q) непрерывная при q ∈ Rn кососимметрическая мат-
рица, для которой при всех q ∈ Rn справедлива оценка
(4)
∥P (q)∥ ≤ p0∥q∥σ-1,
где постоянные p0 и σ удовлетворяют условиям p0 > 0, σ > 1.
Таким образом, рассматриваем случай, когда A симметрическая и поло-
жительно определенная матрица инерционных характеристик системы, а ли-
нейные скоростные силы являются диссипативными. Кроме того, в соответ-
ствии с теоремой о канонической структуре силовых полей [31] считаем,
что нелинейные позиционные силы представлены в виде сумм потенциаль-
ных и неконсервативных составляющих, причем для подынтегральной век-
тор-функции неконсервативная составляющая равна нулю.
Известно [21], что если
Π
(5)
(q) ≡ 0,
то для асимптотической устойчивости положения равновесия (2) достаточно,
чтобы функция Π(q) была положительно определена, а параметр σ удовле-
творял неравенству
(6)
2σ > µ + 1.
Исследуем устойчивость положения равновесия в случае, когда тожде-
ство (5) не выполнено.
Теорема 1. Если µ > 1, функция Π(q) + τ Π(q) положительно определе-
на и справедливо неравенство (6), то положение равновесия (2) системы (3)
асимптотически устойчиво.
Доказательства теоремы 1 и последующих теорем 2, 3 приведены в При-
ложении.
6
Замечание 1. Теорема 1 дает конструктивный способ стабилизации ме-
ханической системы за счет выбора позиционных сил с распределенным за-
паздыванием. При этом важно, что потенциальная энергия системы Π(q) мо-
жет не быть положительно определенной, а порядок неконсервативных сил
может быть меньше порядка однородности векторных функций ∂Π(q)/∂q
и ∂Π(q)/∂q. Отметим, что для линейных систем такой способ стабилиза-
ции приводит к более жестким и менее конструктивным условиям на выбор
подынтегрального члена (см. [8, 25, 30]).
С помощью построенного при доказательстве теоремы 1 функционала
Ляпунова-Красовского (Π.1) можно не только показать, что положение рав-
новесия системы (3) асимптотически устойчиво, но и оценить скорость схо-
димости решений к положению равновесия.
Действительно, используя соотношения (Π.2), (Π.3), получаем, что при
∥qt∥ < δ этот функционал удовлетворяет дифференциальному неравенству
µ+1
V
≤ -c V
2
,
c= const > 0,
интегрируя которое, приходим к следующему результату.
Следствие 1. Пусть выполнены условия теоремы 1. Тогда существу-
ют положительные числа d1, d2, d3,δ такие, что если начальные данные
решения q(t,t0,χ) системы (3) удовлетворяют условиям t0 ≥ 0, ∥χ∥τ <δ,
то
(
)-
1
∥q(t, t0, χ)∥ ≤ d1∥χ∥τ
1 + d3∥χ∥µ-1τ(t - t0)
µ-1 ,
(
)-
1
µ-1
∥˙q(t, t0, χ)∥ ≤ d2∥χ∥τ
1 + d3∥χ∥µ-1τ(t - t0)
при всех t ≥ t0.
4. Исследование устойчивости на основе декомпозиции
Рассмотрим теперь случай, когда матрицы A и B в системе (1) являются
постоянными и неособыми (в отличие от предыдущего раздела, не предпо-
лагается, что они симметрические и положительно определенные), а вектор-
ные функции Q(q) и D(q) непрерывны при q ∈ Rn и являются однородными
порядка µ > 1. Для анализа устойчивости такой системы применим метод
декомпозиции в форме, предложенной в работах [9, 19-22].
Строим изолированные подсистемы без запаздывания
(7)
A x(t) = -Bx(t),
(8)
B y(t) = -Q(y(t)) - τD(y(t)).
Теорема 2. Если µ > 1 и нулевые решения подсистем (7), (8) асимп-
тотически устойчивы, то положение равновесия (2) системы (1) также
асимптотически устойчиво.
7
Замечание 2. Как и теорема 1, теорема 2 дает конструктивный способ
стабилизации механической системы за счет выбора подынтегральной функ-
ции в слагаемом с распределенным запаздыванием, а с помощью построен-
ного при ее доказательстве функционала Ляпунова-Красовского можно оце-
нить скорость сходимости решений к положению равновесия.
5. Одноосная стабилизация твердого тела
Рассмотренные выше дифференциальные системы (1) и (3) имеют струк-
туру, типичную для математических моделей, описывающих большое разно-
образие механических систем. Тем не менее во многих актуальных прило-
жениях могут встречаться математические модели, в которых дифференци-
альные уравнения движения разрешены относительно первых производных.
Это обстоятельство не препятствует применению разработанных подходов к
таким моделям. К числу этих моделей относятся задачи динамики объектов,
аппроксимируемых твердым телом, поворачивающимся относительно своего
центра масс. Рассмотрим в данном разделе одну из таких задач, в которой
разработанные подходы успешно применяются для одноосной стабилизации
твердого тела в пространстве.
Рассмотрим твердое тело, совершающее вращательное движение относи-
тельно своего центра масс (точка O) с угловой скоростью ω. Пусть Oxyz
система жестко связанных с телом главных центральных осей инерции, а
Θ = diag(J1,J2,J3) тензор инерции тела в этих осях. Динамические урав-
нения Эйлера, описывающие вращательное движение тела под действием
управляющего момента Mu, имеют вид
(9)
Θ ˙ω(t) + ω(t) × (Θ ω(t)) = Mu.
Переходя к задаче об одноосной стабилизации тела, введем в рассмотре-
ние орт r, неподвижный в системе координат Oxyz, и орт s, неподвижный в
инерциальном пространстве. По теореме о полной и локальной производной
для орта s имеем равенство (кинематическое уравнение Пуассона)
(10)
s(t) + ω(t) × s(t) = 0,
составляющее вместе с уравнениями (9) замкнутую дифференциальную си-
стему. Задача об одноосной стабилизации твердого тела [32] заключается в
том, чтобы найти управляющий момент Mu, позволяющий обеспечить для
системы (9), (10) существование и асимптотическую устойчивость решения
(11)
s = r, ω = 0,
соответствующего положению равновесия оси тела.
8
Как доказано в [32], данная задача может быть решена с использовани-
ем управляющего момента вида Mu = -a∥s(t) - r∥µ-1s(t) × r - F ω(t). Здесь
первая составляющая представляет собой восстанавливающий момент, а вто-
рая диссипативный момент. При этом a > 0, µ ≥ 1, F постоянная по-
ложительно определенная матрица. Похожая задача, относящаяся к классу
нелинейных динамических задач [5, 33], отличающаяся, однако, линейностью
управляющего момента и неинерциальностью базовой системы координат
(такие системы координат широко используются в космодинамике [34, 35]
наряду с инерциальными системами координат), была рассмотрена в рабо-
те [36]. С целью выполнения требования к гладкости переходных процессов,
принципиально важного для некоторых задач управления ориентацией ИСЗ
(в частности, в условиях, близких к резонансным [34, 37]), в [36] было при-
менено управление с распределенным запаздыванием (интегральный член),
что оказалось эффективным.
Применим аналогичный подход в данной задаче. Для этого введем в си-
стему управления наряду с моментом Mu также момент
∫t
Mτ = b
∥s(ξ) - r∥µ-1s(ξ) × r dξ,
t-τ
где b постоянный коэффициент, τ постоянное положительное запазды-
вание. Тогда уравнения Эйлера примут вид
(12)
Θ ω(t) + ω(t) × (Θω(t)) = -Fω(t) - a∥s(t) - r∥µ-1
s(t) × r +
∫t
+b
∥s(ξ) - r∥µ-1s(ξ) × r dξ.
t-τ
Будем считать, что начальные функции χ(ξ) для системы (10), (12) при-
надлежат пространству C([-τ, 0], R6) непрерывных функций с равномерной
нормой ∥χ∥τ = maxξ∈[-τ,0] ∥χ(ξ)∥. Требуется определить условия асимптоти-
ческой устойчивости положения равновесия (11) системы (10), (12). Такая
задача решалась в работе [30] в случае линейных (µ = 1) восстанавливающе-
го момента и момента Mτ . Было доказано, что одноосную стабилизацию тела
можно гарантировать, если выполнено неравенство
(13)
|b|τ < a,
и в диссипативной составляющей управляющего момента имеется достаточно
большой положительный множитель.
Цель настоящего раздела показать, что при использовании существенно
нелинейных (µ > 1) восстанавливающего момента и момента Mτ одноосная
стабилизация тела может быть обеспечена при менее жестких ограничениях
9
на параметры системы. В частности, ослабление требований к величине дис-
сипативного момента играет важную роль в задачах угловой стабилизации
ИСЗ, поскольку создание диссипативных моментов в космических условиях
представляет непростую задачу.
Теорема 3. Пусть µ > 1. Тогда при выполнении неравенства
(14)
bτ < a
положение равновесия (11) системы (10), (12) асимптотически устойчиво.
Замечание 3. По сравнению с условием (13), неравенство (14) задает
более широкую область допустимых значений параметров системы, при этом
в теореме 3 не требуется наличия большого параметра в качестве множителя
при моменте диссипативных сил. Кроме того, в отличие от линейного случая
(см. [30]), из теоремы 3 следует, что при использовании существенно нелиней-
ного момента Mτ одноосную стабилизацию тела можно гарантировать при
a = 0, b < 0, т.е. когда на тело не действует восстанавливающий момент.
6. Результаты численного моделирования
Рассматривается твердое тело с моментами инерции J1 = 5, J2 = 6, J3 = 4.
Здесь и далее все физические величины имеют размерности в системе СИ.
Ставится задача одноосной стабилизации тела в инерциальной системе ко-
(
√
√
√
ординат в положении равновесия (11), при котором r =
1/
3,1/
3, 1/
3)⊤.
Задача решается с использованием управления, построенного в предыдущем
разделе, в соответствии с уравнениями (10), (12).
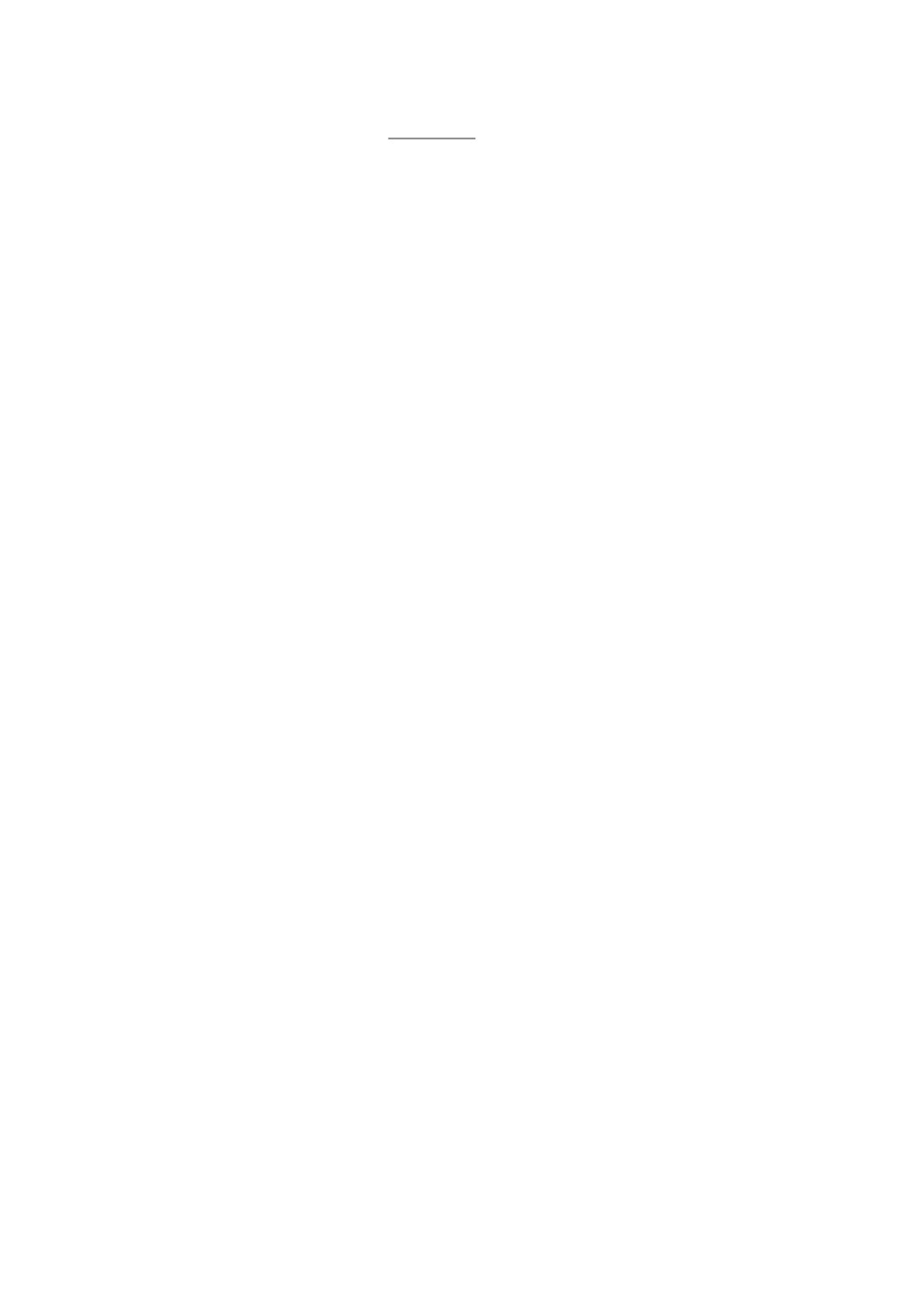
Пусть F = h · diag (1, 1, 1), h = 0,7, a = 2, b = 2, τ = 0,9. Выбрав µ = 1, со-
ответствующий случаю линейных позиционных сил, получаем пример, кото-
рый был ранее рассмотрен в статье [30]. Так же, как в [30], предположим, что
тело отклонено от положения равновесия так, что при t ∈ [-τ, 0] углы кре-
на, тангажа и рыскания (“самолетные” углы) соответственно имели значения
ϕ(t) = 0,5, θ(t) = 0,6, ψ(t) = -0,8, а проекции угловой скорости тела на глав-
ные центральные оси инерции были равны ωx(t) = ωy(t) = ωz(t) = 1. Процесс
стабилизации тела, характеризуемый поведением направляющих косинусов
стабилизируемой оси относительно базовой системы координат, показан на
рис. 1.
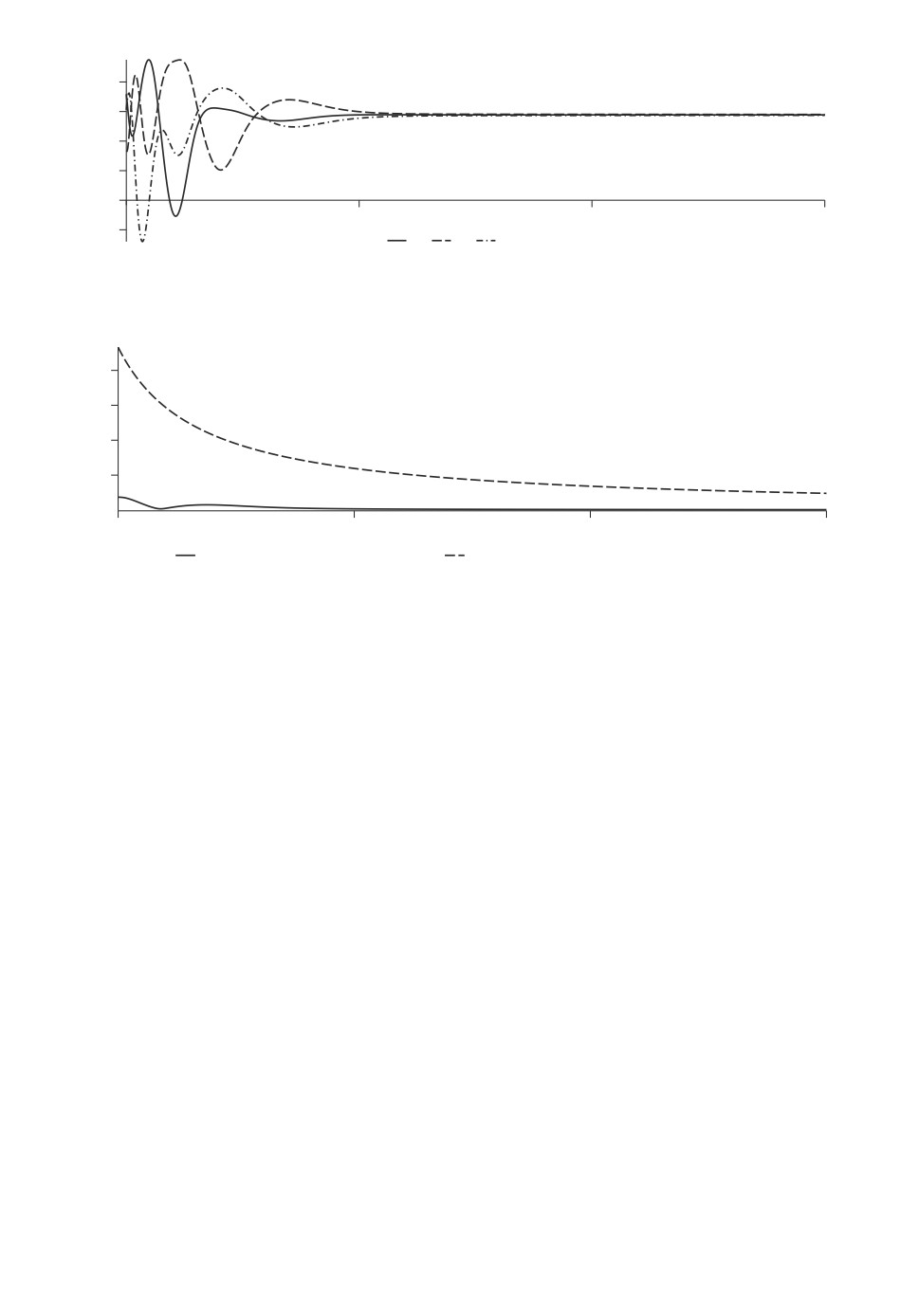
0,8
0,6
0,4
g1
g2
g3
0,2
0
50
100
150
Рис. 1. Направляющие косинусы стабилизируемой оси, b = 2, µ = 1.
10
0,8
0,6
0,4
0,2
0
50
100
1
50
g1
g2
g3
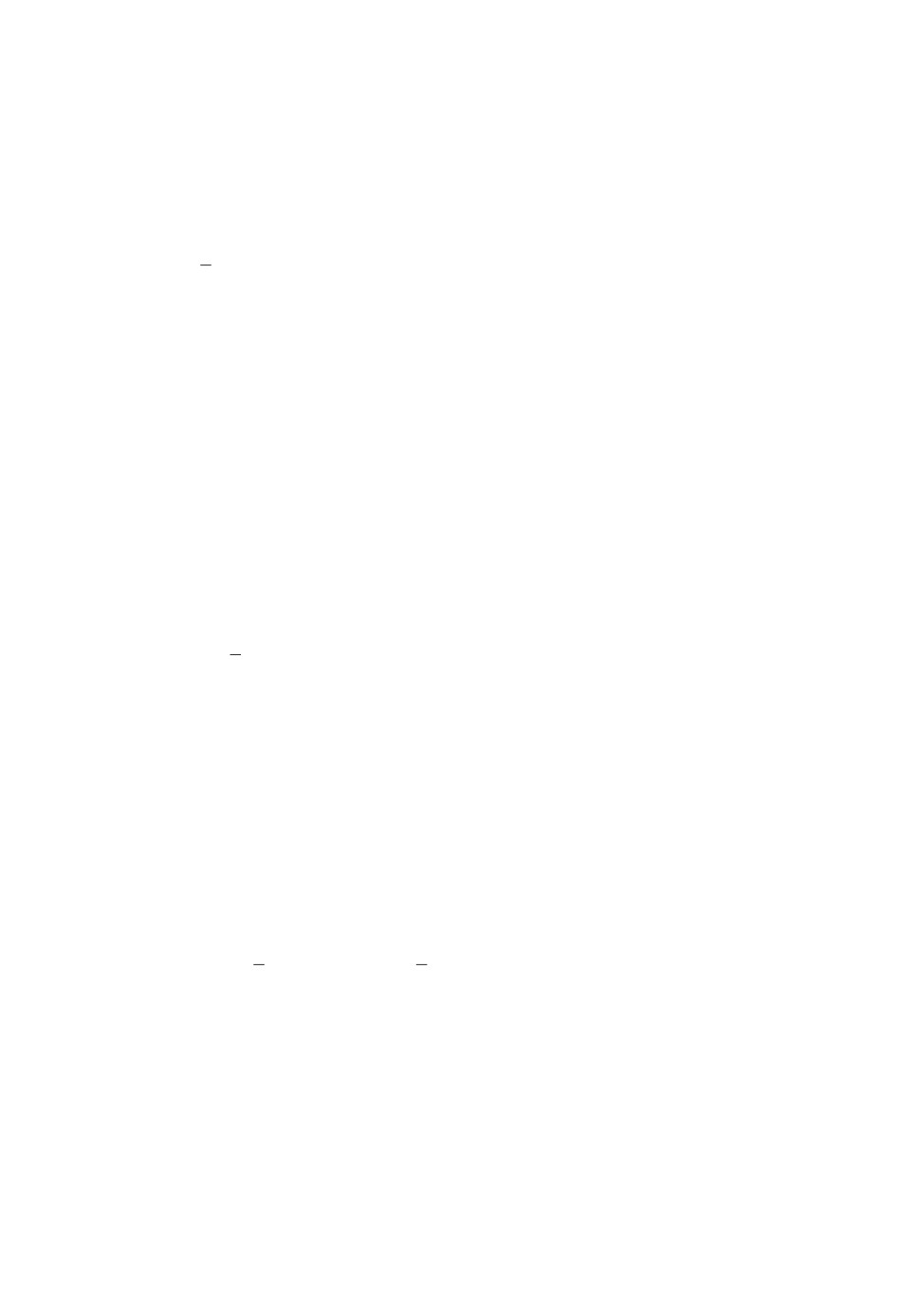
Рис. 2. Направляющие косинусы стабилизируемой оси, b = -2, µ = 1.
0,8
0,6
0,4
g1
g2
g3
0,2
0
50
100
150
Рис. 3. Направляющие косинусы стабилизируемой оси, b = -2, µ = 2.
Неравенство (13) в этом случае выполняется. Точно так же, неравен-
ство (13) будет выполняться, если заменить знак параметра b на противопо-
ложный. Однако численное интегрирование свидетельствует о том, что при
b = -2 и прежних значениях всех прочих параметров и начальных условий,
выбранное управление не справляется с задачей стабилизации оси тела (см.
рис. 2). Напомним, что доказанная в [30] теорема гарантирует стабилизацию
только при достаточно больших значениях параметра h.
Выберем теперь µ = 2, что соответствует нелинейному восстанавливающе-
му моменту в управлении, и снова проинтегрируем уравнения (10), (12) при
b = -2 и прежних значениях всех прочих параметров и начальных условий.
Результат, показанный на рис. 3, свидетельствует о сходимости процесса ста-
билизации оси тела, что полностью согласуется с утверждением теоремы 3.
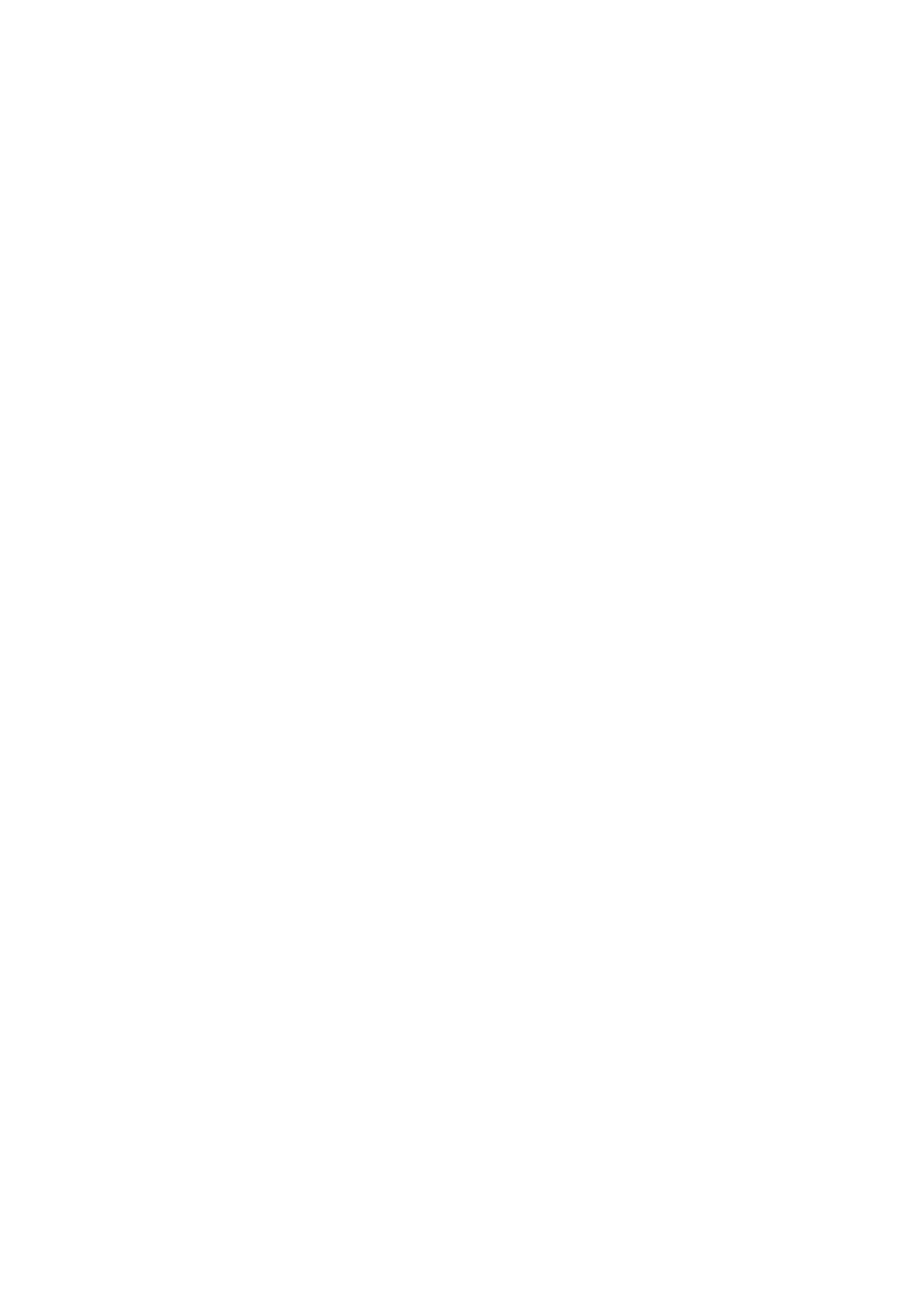
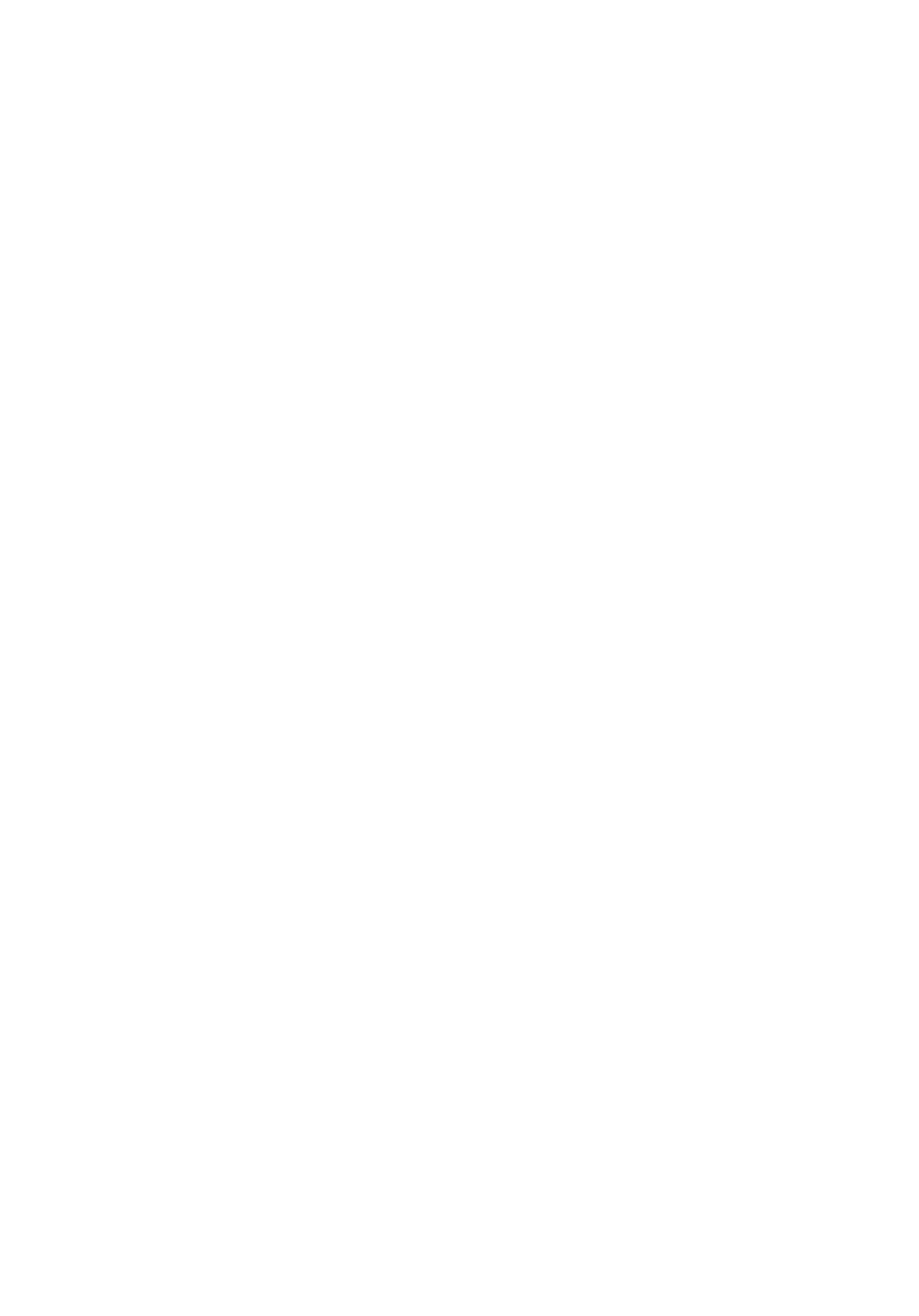
Проиллюстрируем также замечание 3 к теореме 3. Для этого существенно
уменьшим коэффициенты при восстанавливающем и диссипативном момен-
тах, выбрав a = 0,6, h = 0,2, и положим b = -0,6. Сначала выберем µ = 1.
Неравенство (13) в этом случае не выполняется, а процесс стабилизации оси
тела не сходится. Хаотичный процесс, показанный для ясности на коротком
промежутке времени на рис. 4, продолжается таким же образом и на интер-
вале времени, имеющем в 100 раз большую продолжительность.
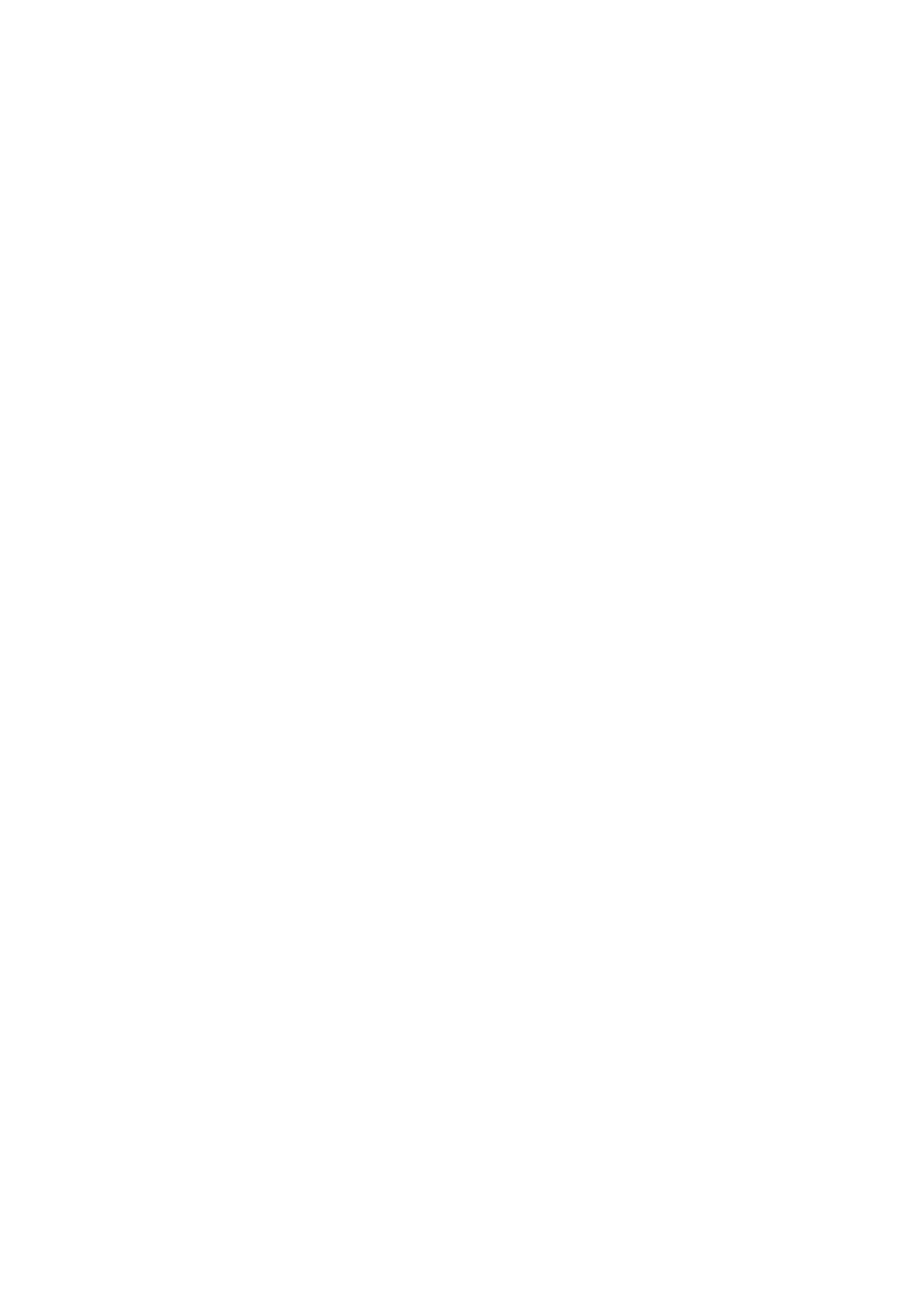
Теперь выберем µ = 2, оставив без изменения все прочие параметры и на-
чальные условия. В этом случае выполняется неравенство (14). Соответст-
вующие результаты численного моделирования показаны на рис. 5.
11
0,8
0,6
0,4
0,2
0
-0,2
50
100
150
-0,4
g1
g2
g3
-0,6
Рис. 4. Направляющие косинусы стабилизируемой оси, a = 0,6, h = 0,2, b = -0,6,
µ = 1.
0,8
0,6
0,4
0,2
0
-0,2
1
0
0
2
00
300
400
500
600
700
-0,4
g1
g2
g
3
-0,6
Рис. 5. Направляющие косинусы стабилизируемой оси, a = 0,6, h = 0,2, b = -0,6,
µ = 2.
Видно, что процесс одноосной стабилизации тела сходится к программ-
ному положению, что согласуется с утверждением теоремы 3. Медленная
сходимость процесса объясняется существенной нелинейностью управления,
а также малостью значений коэффициентов a и h. При этом малость упо-
мянутых коэффициентов не всегда может рассматриваться лишь как недо-
статок системы управления. В частности, в задачах угловой стабилизации
ИСЗ такое положение дел может являться естественным следствием условий
функционирования системы управления.
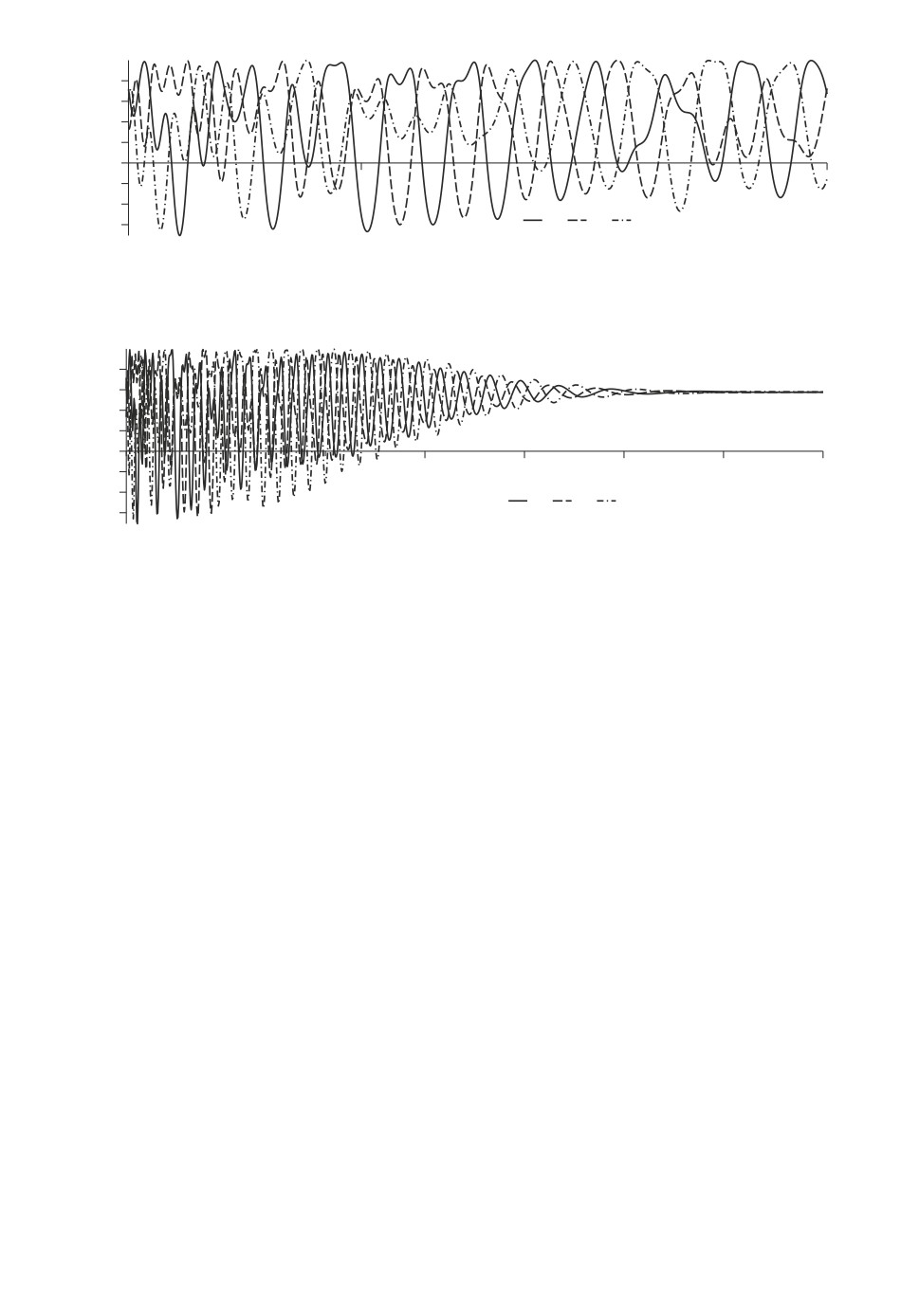
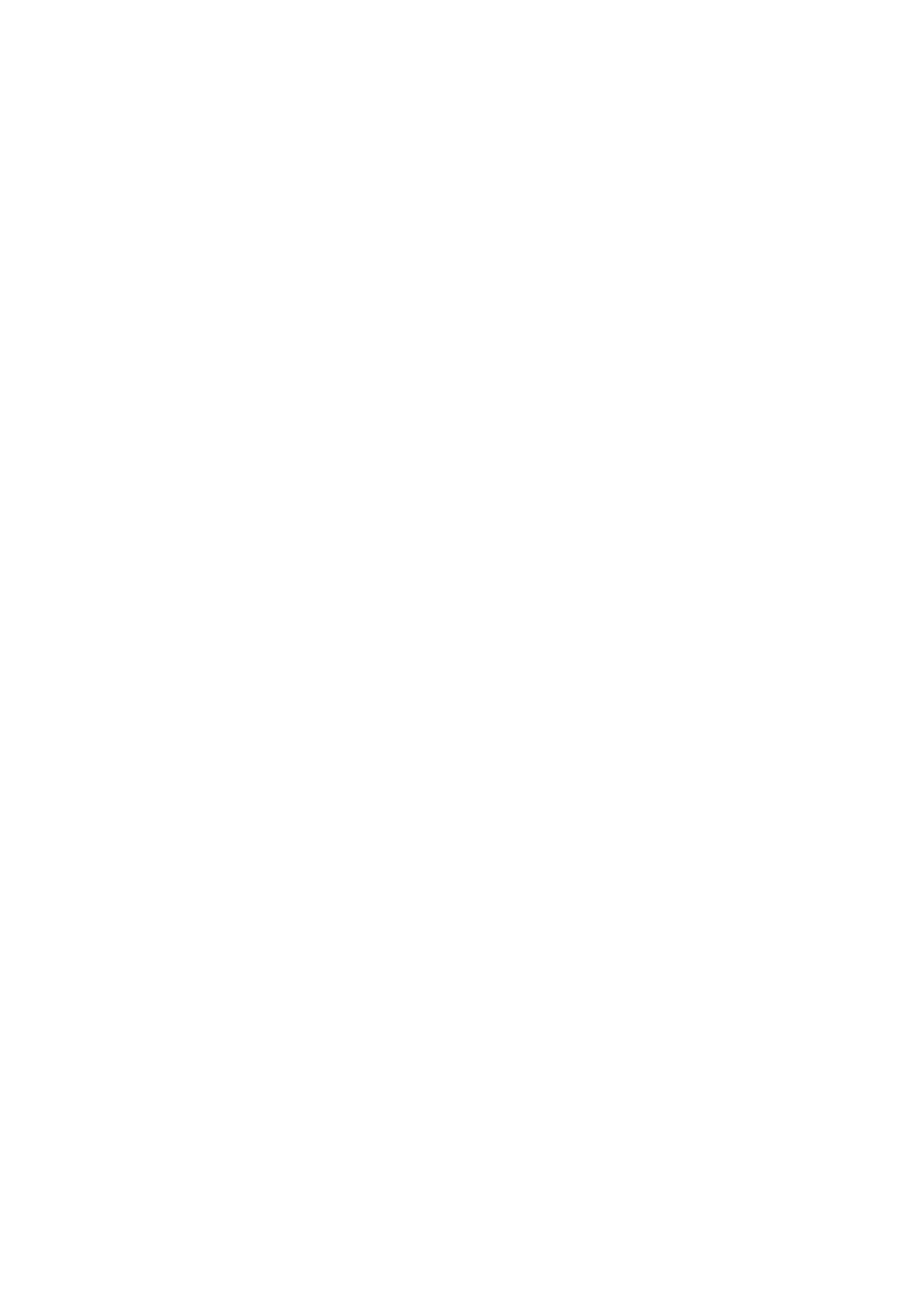
В замечании 3 также отмечено, что вывод теоремы 3 допускает нулевое
значение коэффициента a. Выберем a = 0, h = 1, τ = 1, b = -1, µ = 2, оставив
без изменения остальные параметры и начальные условия движения. Пред-
ставленные на рис. 6 результаты моделирования подтверждают теоретиче-
ский вывод.
Кроме того, для рассматриваемого случая, используя доказательство тео-
ремы 3, получаем следующие оценки области притяжения и скорости сходи-
мости решений:
(15)
∥s(t) - r∥ ≤ 9,21∥χ∥τ (1 + 0,23∥χ∥τ (t - t0))-1 ,
∥ω(t)∥ ≤ 7,44∥χ∥τ (1 + 0,23∥χ∥τ (t - t0))-1
при ∥χ∥τ < 0,28. Далее эти теоретические результаты сравниваются с ре-
зультатами компьютерного моделирования. На рис. 7 показаны два графи-
ка: сплошной линией полученные численным интегрированием значения
12
0,8
0,6
0,4
0,2
0
50
100
150
-0,2
g1
g2
g3
Рис. 6. Направляющие косинусы стабилизируемой оси, a = 0, h = 1, b = -1, µ = 2.
2,0
1,5
1,0
0,5
0
50
100
150
||s(t) - r|| - численный расчет
||s(t) - r|| - аналитическая оценка
Рис. 7. Сравнение численных и аналитических результатов.
∥s(t) - r∥ в зависимости от t, а пунктирной линией оценка, соответствую-
щая правой части неравенства (15).
Расчеты выполнены для следующих начальных функций: ϕ(t) = 0,8,
θ(t) = 0,8, ψ(t) = -0,8, ωx(t) = ωy(t) = ωz(t) = 0,1 при t ∈ [-τ, 0]. При таком
выборе значение ∥χ∥τ оказывается равным 0,25 и, следовательно, неравенство
∥χ∥τ < 0,28 выполнено.
7. Заключение
В статье рассмотрены вопросы устойчивости решений дифференциаль-
ных систем, описывающих движения в механических системах, в том числе,
в системах управления, отличающихся существенной нелинейностью пози-
ционных сил и наличием распределенного запаздывания. С использованием
функционалов Ляпунова-Красовского полного типа специальной конструк-
ции и метода декомпозиции показано, что, в отличие от линейного случая,
для асимптотической устойчивости системы с существенно нелинейными по-
зиционными силами не требуется наличия большого параметра при скорост-
ных силах, причем условия асимптотической устойчивости формулируются в
более простой и конструктивной форме. Доказаны две теоремы об устойчиво-
сти положений равновесия указанных механических систем, а также теорема
о стабилизации оси твердого тела в пространстве с помощью нелинейного по
позиционным силам управления с распределенным запаздыванием. Приведе-
13
ны результаты численного моделирования, подтверждающие выводы, полу-
ченные аналитически. В качестве направления для дальнейших исследований
отметим вопрос о влиянии величины запаздывания на оценку области при-
тяжения.
ПРИЛОЖЕНИЕ
Доказательство теоремы
1. Используя подходы, разработанные
в статьях [20-22, 38], строим функционал Ляпунова-Красовского в следую-
щем виде:
1
1
V (qt) =
q⊤(t)A
˙q(t) +
q⊤(t)Bq(t) + q⊤(t)A
˙q(t) -
2
2
∫t
∫
t
∂Π(q(ξ))
(Π.1)
- q⊤(t) (ξ - t + τ)
dξ + (α + β(ξ - t + τ))∥q(ξ)∥µ+1
dξ,
∂q
t-τ
t-τ
где λ, α, β
положительные параметры. Дифференцируя его в силу систе-
мы (3), получаем
V
= -λq⊤(t)Bq(t) +
q⊤(t)A˙q(t) -
∫
t
∂Π(q(ξ))
-
q⊤(t)∂Π(q(t))
+
dξ + P (q(t))q(t) -
∂q
∂q
t-τ
(
)
t
∫
∂Π(q(t))
∂Π(q(t))
∂Π(q(ξ))
- q⊤(t)
+τ
-
˙q⊤(t) (ξ - t + τ)
dξ -
∂q
∂q
∂q
t-τ
∫t
-β
∥q(ξ)∥µ+1dξ + (α + βτ)∥q(t)∥µ+1 - α∥q(t - τ)∥µ+1.
t-τ
Учитывая свойства однородных функций [32], нетрудно показать, что
справедливы оценки
∫t
λc1∥
˙q(t)∥2 + c2∥q(t)∥2 - c3∥q(t)∥∥q˙(t)∥ - c4τ∥q(t)∥
∥q(ξ)∥µdξ +
t-τ
∫t
+α
∥q(ξ)∥µ+1dξ ≤ V (qt) ≤ λc5∥
˙q(t)∥2 + c6∥q(t)∥2 + c3∥q(t)∥∥q˙(t)∥ +
t-τ
∫t
∫ t
+ c4τ∥q(t)∥
∥q(ξ)∥µdξ + (α + βτ)
∥q(ξ)∥µ+1dξ,
t-τ
t-τ
14
t
∫
V
≤ -(λc7 -c8)∥q(t)∥2 + λ∥˙q(t)∥c9∥q(t)∥µ
+c10
∥q(ξ)∥µdξ + p0∥q(t)∥σ -
t-τ
∫t
-c11∥q(t)∥µ+1 + c12τ∥q(t)∥
∥q(ξ)∥µdξ -
t-τ
∫t
-β
∥q(ξ)∥µ+1dξ + (α + βτ)∥q(t)∥µ+1 - α∥q(t - τ)∥µ+1.
t-τ
Здесь ck положительные постоянные, k = 1, . . . , 12.
С использованием неравенства Юнга [7] получаем, что положительные
числа λ, α, β, δ можно выбрать так, чтобы при ∥qt∥τ < δ выполнялись соот-
ношения
t
∫
1
λc1∥
˙q(t)∥2 + c2∥q(t)∥2 + α
∥q(ξ)∥µ+1dξ ≤ V (qt) ≤
2
t-τ
t
∫
(Π.2)
≤2λc5∥
˙q(t)∥2 + c6∥q(t)∥2 + (α + βτ)
∥q(ξ)∥µ+1dξ ,
t-τ
t
∫
1
V
(Π.3)
≤-
λc7∥q(t)∥2 + c11∥q(t)∥µ+1 + β
∥q(ξ)∥µ+1dξ .
2
t-τ
Следовательно, (Π.1) функционал Ляпунова-Красовского полного типа,
удовлетворяющий требованиям теоремы об асимптотической устойчивости
[6, c. 22].
Теорема 1 доказана.
Доказательство теоремы 2. Переходя к новым переменным x(t) =
=
q(t), y(t) = q(t) + B-1A˙q(t), преобразуем систему (1) к виду
∫t
A x(t) = -Bx(t) - Q(y(t) - B-1Ax(t)) - D(y(ξ) - B-1Ax(ξ))dξ,
t-τ
(Π.4)
∫t
B y(t) = -Q(y(t) - B-1Ax(t)) - D(y(ξ) - B-1Ax(ξ))dξ.
t-τ
Нулевые решения изолированных подсистем
(7),
(8) асимптотически
устойчивы. Поэтому (см. [32, 39]) для любых чисел ν1 ≥ 2, ν2 ≥ 2 найдутся
15
дважды непрерывно дифференцируемые однородные порядка ν1 и ν2 соот-
ветственно функции Ляпунова V1(x) и V2(y) такие, что для всех x, y ∈ Rn
будут выполнены неравенства
m11∥x∥ν1 ≤ V1(x) ≤ m12∥x∥ν1 ,
m21∥y∥ν2 ≤ V2(y) ≤ m22∥y∥ν2 ,
∂V1(x)
∂V2(y)
m13∥x∥ν1-1,
m23∥y∥ν2-1,
≤
≤
∂x
∂y
(∂V1(x))⊤
A-1Bx(t) ≥ m14∥x∥ν1 ,
∂x
(∂V2(y))⊤
B-1(Q(y) + τD(y)) ≥ m24∥y∥ν2+µ-1.
∂y
Здесь mkj положительные постоянные, k = 1, 2, j = 1, 2, 3, 4.
Рассмотрим функцию Ляпунова
(Π.5)
V (x, y) = V1(x) + V2
(y).
Вычисляя ее производную в силу системы (Π.4) и используя свойства одно-
родных функций, получаем оценку
̃
V ≤ -m14∥x(t)∥ν1 + c1∥x(t)∥ν1-1(∥x(t)∥µ + ∥y(t)∥µ) +
∫
t
∫
t
(∂V2(y(t)))⊤
+ c2∥x(t)∥ν1-1
(∥x(ξ)∥µ + ∥y(ξ)∥µ) dξ -
B-1
D(y(ξ))dξ -
∂y
t-τ
t-τ
)⊤
(∂V2(y(t))
-
B-1Q(y(t)) + c3∥y(t)∥ν2-1∥Q(y(t)) - Q(y(t) - B-1Ax(t))∥ +
∂y
t
∫
+ c4∥y(t)∥ν2-1
∥D(y(ξ)) - D(y(ξ) - B-1Ax(ξ))∥dξ,
t-τ
где c1, c2, c3, c4
положительные постоянные.
Заметим, что для любых чисел ε1 > 0 и ε2 > 0 можно указать h1 > 0 и
h2 > 0 такие, что
∥Q(y) - Q(y - B-1Ax)∥ ≤ ε1∥y∥µ + h1∥x∥µ,
∥D(y) - D(y - B-1Ax)∥ ≤ ε2∥y∥µ + h2∥x∥µ
при всех x, y ∈ Rn.
16
Выберем теперь функционал Ляпунова-Красовского в виде
)⊤
∫
t
(∂V2(y(t))
V (xt, yt)
V (x(t), y(t)) -
B-1
(ξ + τ - t)D(y(ξ))dξ +
∂y
t-τ
∫t
∫
t
+ (α1 + β1(ξ + τ - t))∥x(ξ)∥ν1 dξ + (α2 + β2(ξ + τ - t))∥y(ξ)∥ν2+µ-1dξ,
t-τ
t-τ
где
V (x, y)
функция Ляпунова, построенная по формуле (Π.5), а
α1,β1,α2,β2
положительные параметры. Имеем
∫
t
c5∥x(t)∥ν1 + c6∥y(t)∥ν2 - c7τ∥y(t)∥ν2-1
∥y(ξ)∥µdξ +
t-τ
∫t
∫
t
+α1
∥x(ξ)∥ν1 dξ + α2
∥y(ξ)∥ν2+µ-1dξ ≤ V (xt, yt) ≤
t-τ
t-τ
t
∫
≤ c8∥x(t)∥ν1 + c9∥y(t)∥ν2 + c7τ∥y(t)∥ν2-1
∥y(ξ)∥µdξ +
t-τ
∫t
∫
t
+ (α1 + β1τ)
∥x(ξ)∥ν1 dξ + (α2 + β2τ)
∥y(ξ)∥ν2+µ-1dξ,
t-τ
t-τ
V
≤ -m14∥x(t)∥ν1 - m24∥y(t)∥ν2+µ-1 + c1∥x(t)∥ν1-1(∥x(t)∥µ + ∥y(t)∥µ) +
t
∫
+c2∥x(t)∥ν1-1
(∥x(ξ)∥µ +∥y(ξ)∥µ)dξ+c3∥y(t)∥ν2-1(ε1∥y(t)∥µ +h1∥x(t)∥µ) +
t-τ
∫
t
∫
t
+τc10∥y(t)∥ν2-2
∥y(ξ)∥µdξ∥x(t)∥µ +∥y(t)∥µ+
(∥x(ξ)∥µ +∥y(ξ)∥µ)dξ +
t-τ
t-τ
∫
t
∫
t
+ ε2c4∥y(t)∥ν2-1
∥y(ξ))∥µdξ + h2c4∥y(t)∥ν2-1
∥x(ξ)∥µdξ -
t-τ
t-τ
t
∫t
∫
-β1
∥x(ξ)∥ν1 dξ - β2
∥y(ξ)∥ν2+µ-1dξ +
t-τ
t-τ
+ (α1 + β1τ)∥x(t)∥ν1 - α1∥x(t - τ)∥ν1 + (α2 + β2τ)∥y(t)∥ν2+µ-1 -
- α2∥y(t - τ)∥ν2+µ-1.
17
Здесь ck > 0, k = 5, . . . , 10.
Используя неравенство Юнга [7], получаем, что если порядки однородно-
сти функций V1(x) и V2(y) удовлетворяют условию 1 < (ν2 + µ - 1)/ν1 < µ,
а величины ε1, ε2, α1, β1, α2, β2, δ достаточно малы, то при ∥xt∥τ + ∥yt∥τ < δ
будут выполнены соотношения
t
∫
1
c6∥y(t)∥ν
2 +α2
∥y(ξ)∥ν2+µ-1dξ + c5∥x(t)∥ν1 +
2
t-τ
∫t
+α1
∥x(ξ)∥ν1 dξ ≤ V (xt, yt) ≤
t-τ
∫t
≤ c8∥x(t)∥ν1 + (α1 + β1τ)
∥x(ξ)∥ν1 dξ +
t-τ
∫
t
+ 2c9∥y(t)∥ν2 + (α2 + β2τ)
∥y(ξ)∥ν2+µ-1dξ ,
t-τ
1
V
≤-
m14∥x(t)∥ν1 + m24∥y(t)∥ν2+µ-1 +
2
t
∫t
∫
+β1
∥x(ξ)∥ν1 dξ + β2
∥y(ξ)∥ν2+µ-1dξ .
t-τ
t-τ
Теорема 2 доказана.
Доказательство теоремы
3. Функционал Ляпунова-Красовского
выбираем в виде
1
1
V (st, ωt) =
λω⊤(t)Θω(t) +
∥s(t) - r∥2 + (s(t) × r)⊤F-1Θω(t) +
2
2
∫t
+ b(s(t) × r)⊤F-1 (ξ + τ - t)∥s(ξ) - r∥µ-1s(ξ) × rdξ +
t-τ
∫t
+ (α + β(ξ + τ - t))∥s(ξ) - r∥µ+1dξ,
t-τ
где λ, α, β положительные параметры.
18
Для данного функционала и его производной в силу системы (10), (12)
справедливы оценки
1
c1λ∥ω(t)∥2 +
∥s(t) - r∥2 - c2∥s(t) - r∥∥ω(t)∥ -
2
∫t
∫
t
− c3|b|τ∥s(t) - r∥
∥s(ξ) - r∥µdξ + α
∥s(ξ) - r∥µ+1dξ ≤ V (st, ωt) ≤
t-τ
t-τ
1
≤ c4λ∥ω(t)∥2 +
∥s(t) - r∥2 + c2∥s(t) - r∥∥ω(t)∥ +
2
t
∫t
∫
+ c3|b|τ∥s(t) - r∥
∥s(ξ) - r∥µdξ + (α + βτ)
∥s(ξ) - r∥µ+1dξ,
t-τ
t-τ
V
≤ -(λc5 - c6)∥ω(t)∥2 + λa∥ω(t)∥∥s(t) - r∥µ +
∫t
+ b(λ + c7τ)∥ω(t)∥
∥s(ξ) - r∥µdξ +
t-τ
+ c8∥ω(t)∥2∥s(t) - r∥ - (a - τb)c9∥s(t) - r∥µ-1∥s(t) × r∥2 -
∫t
-β
∥s(ξ) - r∥µ+1dξ + (α + βτ)∥s(t) - r∥µ+1 - α∥s(t - τ) - r∥µ+1.
t-τ
Здесь ck > 0, k = 1, . . . , 9.
Используя неравенство Юнга, нетрудно показать, что если λ > 0 доста-
точно велико, а положительные числа α, β, δ достаточно малы, то при
∥st - r∥τ + ∥ω(t)∥ < δ будут выполнены неравенства
t
∫
1
c1λ∥ω(t)∥2 +1∥s(t) - r∥2 + α
∥s(ξ) - r∥µ+1dξ ≤ V (st, ωt) ≤
2
2
t-τ
∫
t
≤ 2c4λ∥ω(t)∥2 + 1∥s(t) - r∥2 + (α + βτ)
∥s(ξ) - r∥µ+1dξ ,
2
t-τ
t
∫
1
V
≤-
λc5∥ω(t)∥2 + (a - τb)c9∥s(t) - r∥µ+1 + β
∥s(ξ) - r∥µ+1dξ .
2
t-τ
Следовательно [6, c. 22], положение равновесия (11) асимптотически устой-
чиво.
Теорема 3 доказана.
19
СПИСОК ЛИТЕРАТУРЫ
1.
Черноусько Ф.Л., Ананьевский И.М., Решмин С.А. Методы управления нели-
нейными механическими системами. М.: Физматлит, 2006.
2.
Ананьевский И.М., Решмин С.А. Непрерывное управление механической систе-
мой на основе метода декомпозиции // Изв. РАН. Теория и системы управления.
2014. № 4. С. 3-17.
3.
Тхай В.Н. Стабилизация колебания управляемой механической системы с n сте-
пенями свободы // АиТ. 2020. № 9. С. 93-104.
Tkhai V.N. Stabilizing the oscillations of a controlled mechanical system with n de-
grees of freedom // Autom. Remote Control. 2020. V. 81. No. 9. P. 1637-1646.
4.
Su Y.X., Zheng C.H. PID control for global finite-time regulation of robotic ma-
nipulators // International J. of Systems Science. 2017. V. 48. No. 3. P. 547-558.
5.
Sedighi H.M., Daneshmand F. Non-linear transversely vibrating beams by the homo-
topy perturbation method with an auxiliary term // J. of Applied and Computational
Mechanics. 2015. V. 1. No. 1. P. 1-9.
6.
Kharitonov V.L. Time-delay systems. Lyapunov functionals and matrices. Basel:
Birkhauser, 2013.
7.
Fridman E. Introduction to time-delay systems: Analysis and control. Basel:
Birkhauser, 2014.
8.
Fridman E. Tutorial on Lyapunov-based methods for time-delay systems // Euro-
pean J. of Control. 2014. V. 20. P. 271-283.
9.
Зубов В.И. Аналитическая динамика гироскопических систем. Л.: Судостроение,
1970.
10.
Матросов В.М. Метод векторных функций Ляпунова: анализ динамических
свойств нелинейных систем. М.: Физматлит, 2001.
11.
Пятницкий Е.С. Принцип декомпозиции в управлении механическими система-
ми // Докл. АН СССР. 1988. Т. 300. № 2. С. 300-303.
12.
Пятницкий Е.С. Синтез иерархических систем управления механическими и
электромеханическими объектами на принципе декомпозиции. Ч. 1 // АиТ. 1989.
№ 1. С. 87-99.
Pyatnitskii E.S. Design of hierarchical control systems for mechanical and electrome-
chanical processes by decomposition. I // Autom. Remote Control. 1989. V. 50. No. 1.
P. 64-73.
13.
Пятницкий Е.С. Синтез иерархических систем управления механическими и
электромеханическими объектами на принципе декомпозиции. Ч. II // АиТ.
1989. № 2. С. 57-71.
Pyatnitskii E.S. Design of hierarchical control systems for mechanical and electrome-
chanical processes by decomposition. II // Autom. Remote Control. 1989. V. 50.
No. 2. P. 175-186.
14.
Матюхин В.И. Устойчивость движений манипуляционных роботов в режиме
декомпозиции // АиТ. 1989. № 3. С. 33-44.
Matyukhin V.I. Motion stability of manipulator robots in decomposition mode //
Autom. Remote Control. 1989. V. 50. No. 3. P. 314-323.
20
15.
Матюхин В.П., Пятницкий Е.С. Управление движением манипуляционных ро-
ботов на принципе декомпозиции при учете динамики приводов // АиТ. 1989.
№ 9. С. 67-81.
Matyukhin V.I., Pyatnitskii T.S. Controlling the motion of manipulation robots
through decomposition with an allowance for the dynamics of actuators // Autom.
Remote Control. 1989. V. 50. No. 9. P. 1201-1212.
16.
Решмин С.А. Синтез управления двухзвенным манипулятором // Изв. РАН.
Теория и системы управления. 1997. № 2. С. 146-150.
17.
Ананьевский И.М., Решмин С.А. Метод декомпозиции в задаче об отслежива-
нии траекторий механических систем // Изв. РАН. Теория и системы управле-
ния. 2002. № 5. С. 25-32.
18.
Зубов Н.Е., Микрин Е.А., Мисриханов М.Ш., Рябченко В.Н. Синтез развязыва-
ющих законов стабилизации орбитальной ориентации космического аппарата //
Изв. РАН. Теория и системы управления. 2012. № 1. С. 92-108.
19.
Косов А.А. Исследование устойчивости сингулярных систем методом вектор-
функций Ляпунова // Вестник Санкт-Петербургского университета. Сер. 10.
2005. Вып. 4. С. 123-129.
20.
Александров А.Ю., Косов А.А., Чэнь Я. Об устойчивости и стабилизации меха-
нических систем с переключениями // АиТ. 2011. № 6. С. 5-17.
Aleksandrov A.Yu., Kosov A.A., Chen Ya. Stability and stabilization of mechanical
systems with switching // Autom. Remote Control. 2011. V. 72. No. 6. P. 1143-1154.
21.
Александров А.Ю., Косов А.А. Об устойчивости и стабилизации нелинейных
нестационарных механических систем // ПММ. 2010. Т. 74. Вып. 5. С. 774-788.
22.
Aleksandrov A.Yu., Stepenko N.A. Stability analysis of gyroscopic systems with delay
under synchronous and asynchronous switching // J. Appl. Comput. Mech. 2022.
V. 8. No. 3. P. 1113-1119.
23.
Zhang X., Chen X., Zhu G., Su C.-Y. Output feedback adaptive motion control
and its experimental verification for time-delay non-linear systems with asymmet-
ric hysteresis // IEEE Transactions on Industrial Electronics. 2020. V. 67. No. 8.
P. 6824-6834.
24.
Formal’sky A.M. On a modification of the PID controller // Dynamics and Control.
1997. V. 7. P. 269-277.
25.
Ананьевский И.М., Колмановский В.Б. Об устойчивости некоторых управля-
емых систем с последействием // Дифференц. уравнения. 1989. Т. 25. № 11.
С. 1848-1852.
Anan’evskii I.M., Kolmanovskii V.B. Stability of some control systems with afteref-
fect // Differ. Equ. 1989. V. 25. No. 11. P. 1287-1290.
26.
Ананьевский И.М., Колмановский В.Б. О стабилизации некоторых регулируе-
мых систем с последействием // АиТ. 1989. № 9. C. 34-43.
Anan’evskii I.M., Kolmanovskii V.B. On stabilization of some control systems with
an after-effect // Autom. Remote Control. 1989. No. 9. P. 1174-1181.
27.
Павликов С.В. О стабилизации движений управляемых механических систем с
запаздывающим регулятором // Докл. РАН. 2007. Т. 412. № 2. С. 176-178.
28.
Павликов С. В. Знакопостоянные функционалы Ляпунова в задаче об устойчи-
вости функционально-дифференциального уравнения // ПММ. 2007. Т. 71. № 3.
С. 377-387.
21
29.
Shen J., Lam J. Decay rate constrained stability analysis for positive systems with
discrete and distributed delays // Systems Science & Control Engineering, 2014.
30.
Александров А.Ю., Тихонов А.А. Анализ устойчивости механических систем
с распределенным запаздыванием на основе декомпозиции // Вестник Санкт-
Петербургского университета. Прикладная математика. Информатика. Процес-
сы управления. 2021. Т. 17. Вып. 1. С. 13-26.
31.
Зубов В.И. Каноническая структура векторного силового поля // Проблемы
механики твердого деформируемого тела. Л.: Судостроение, 1970. С. 167-170.
32.
Зубов В.И. Лекции по теории управления. М.: Наука, 1975.
33.
Samsonov V.A., Dosaev M.Z., Selyutskiy Y.D. Methods of qualitative analysis in
the problem of rigid body motion in medium // International J. of Bifurcation and
Chaos in Applied Sciences and Engineering. 2011. V. 21. No. 10. P. 2955-2961.
34.
Kosjakov E.A., Tikhonov A.A. Differential equations for librational motion of
gravity-oriented rigid body // International J. of Non-Linear Mechanics. 2015. V. 73.
35.
Tikhonov A.A. Natural magneto-velocity coordinate system for satellite attitude sta-
bilization: The concept and kinematic analysis // J. of Applied and Computational
Mechanics. 2021. V. 7. No. 4. P. 2113-2119.
36.
Aleksandrov A.Yu., Tikhonov A.A. Monoaxial electrodynamic stabilization of an
artificial Earth satellite in the orbital coordinate system via control with distributed
delay // IEEE Access. 2021. V. 9. P. 132623-132630.
37.
Тихонов А.А. Резонансные явления в колебаниях гравитационно-ориентирован-
ного твердого тела. Ч. 4: многочастотные резонансы // Вестн. C.-Петербург.
ун-та. Сер. 1. 2000. Вып. 1 (№ 1). С. 131-137.
38.
Efimov D., Aleksandrov A. Analysis of robustness of homogeneous systems with time
delays using Lyapunov-Krasovskii functionals // Int. J. Robust Nonlinear Control.
39.
Rosier L. Homogeneous Lyapunov function for homogeneous continuous vector
field // Systems Control Lett. 1992. V. 19. P. 467-473.
Статья представлена к публикации членом редколлегии Л.Б. Рапопортом.
Поступила в редакцию 28.06.2022
После доработки 25.08.2022
Принята к публикации 29.09.2022
22