Автоматика и телемеханика, № 10, 2023
© 2023 г. А.К. ВОЛКОВИЦКИЙ, д-р техн. наук (avolkovitsky@yandex.ru),
Е.В. КАРШАКОВ, д-р техн. наук (karshakov@ipu.ru),
Б.В. ПАВЛОВ, д-р техн. наук (pavlov@ipu.ru),
Е.А. ТРЕТЬЯКОВА (ekaterina_tretikova@mail.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
ОПРЕДЕЛЕНИЕ ВЗАИМНОГО РАСПОЛОЖЕНИЯ ОБЪЕКТОВ
НА ОСНОВЕ МАГНИТОГРАДИЕНТНЫХ ИЗМЕРЕНИЙ
Работа посвящена решению актуальной задачи определения взаимно-
го пространственного расположения объектов и их взаимной ориента-
ции. Поставлена задача: на основе исследования особенностей диффе-
ренциальной пространственной структуры магнитного поля локального
дипольного источника показать принципиальную возможность простран-
ственного и углового относительного позиционирования при использова-
нии в качестве измерительной информации параметров градиента индук-
ции магнитного поля в тензорной форме и в форме вектора градиента
абсолютной величины. Приведено решение задачи, рассмотрены особен-
ности и ограничения для обеих форм представления. Кратко представ-
лены принципы построения магнитоградиентных измерительных систем,
рассмотрены ограничения технической реализации, показана целесооб-
разность использования источника переменного магнитного поля. Приве-
дены результаты демонстрационных экспериментов, доказывающих воз-
можность применения предложенного метода позиционирования для раз-
личных инженерных задач.
Ключевые слова: относительное позиционирование, индукция магнитного
поля, градиент магнитного поля, тензор градиента.
DOI: 10.31857/S0005231023100021, EDN: YEUIPM
1. Введение
Решение многих инженерных задач так или иначе связано с необходи-
мостью определения относительного взаимного расположения объектов при
их взаимодействии. Так, высокоточный контроль необходим для управления
движением при дозаправке топливом в воздухе; швартовке судна к причалу,
наливному терминалу или буровой платформе; посадке летательного аппа-
рата на ограниченную площадку, стыковке космических и подводных аппара-
тов [1-3]. Решение задачи относительного позиционирования предполагает,
что в системе координат, связанной с одним из объектов, требуется опреде-
лить радиус-вектор точки расположения другого объекта, а также их взаим-
ную угловую ориентацию. Сегодня для решения такого рода задач приме-
няются гироинерциальные системы, многоантенные ГНСС-приемники, опти-
ческие системы и т.п., однако во многих случаях техническое решение суще-
ственно осложняется особенностями условий применения, становясь при этом
6
избыточно громоздким. Во многих случаях точность позиционирования ока-
зывается недостаточной. Значительные перспективы в развитии методов от-
носительного позиционирования открывает возможность использования маг-
нитоградиентных измерений. Основу идеи составляет тот факт, что направ-
ление и абсолютная величина вектора индукции магнитного поля точечного
дипольного излучателя в некой точке пространства в полной мере опреде-
ляются величиной и направлением вектора дипольного магнитного момента
источника и положением точки измерения. Характер зависимости напряжен-
ности поля позволяет по данным, полученным измерителем поля локального
излучателя, определить одновременно их взаимное пространственное и угло-
вое расположение.
2. Постановка задачи
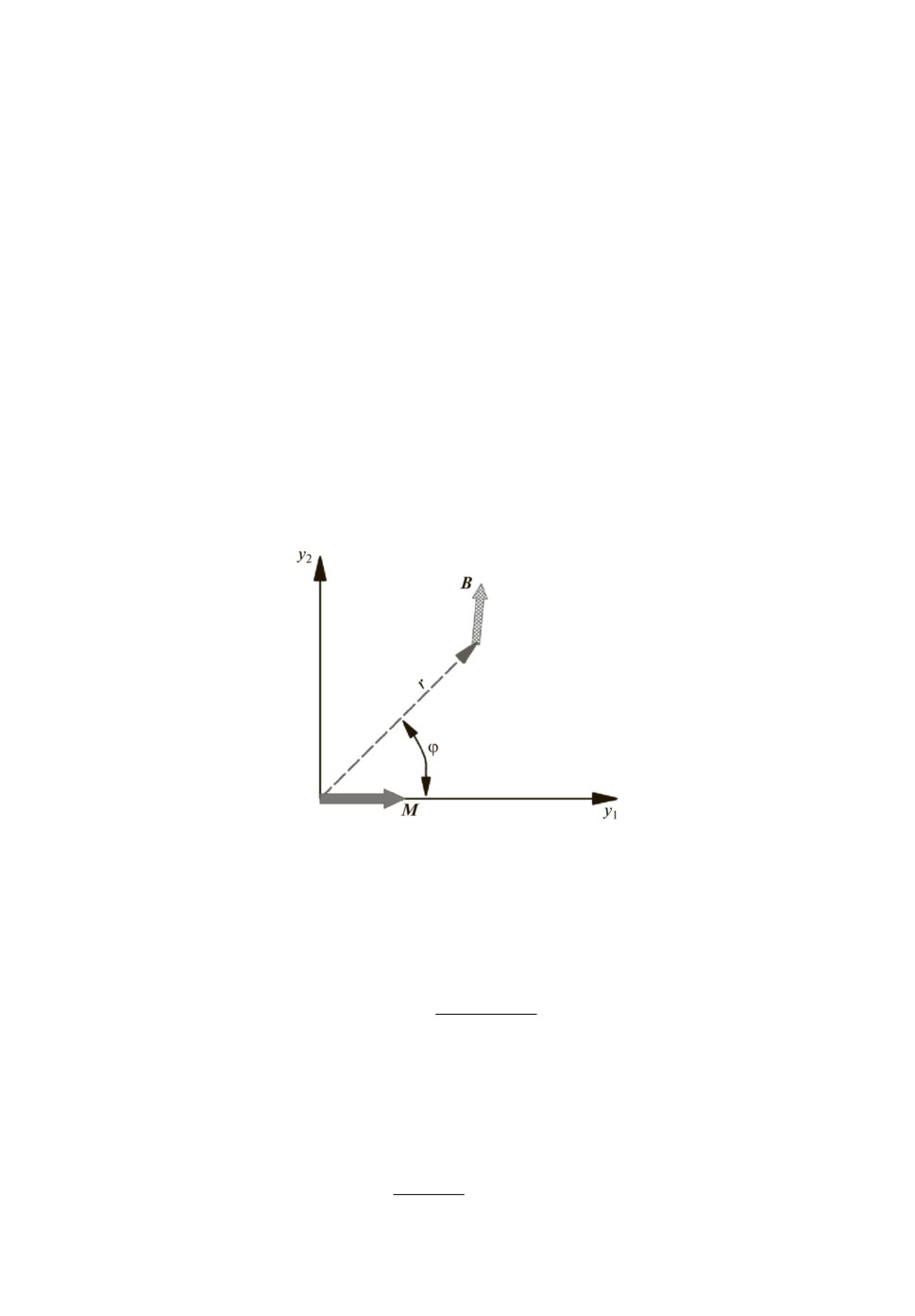
Рассмотрим следующую схему. Пусть в начале системы координат распо-
лагается локальный дипольный излучатель магнитного поля с произвольным
направлением вектора дипольного магнитного момента М, а измерение поля
осуществляется в произвольной точке пространства, определяемой радиус-
вектором r в этой системе координат (рис. 1).
Рис. 1. Вектор дипольного магнитного момента и вектор индукции поля в системе
координат, связанной с диполем-излучателем.
Для потенциала магнитного поля UB локального дипольного излучателя
в связанной с ним системе координат справедливо соотношение:
μμ0rTM
(1)
UB =
4π (rTr)3/2
Здесь μ и μ0 — магнитная проницаемость среды и магнитная постоянная в
междунарожной системе единиц (СИ) соответственно.
Дифференцируя (1), получим значения для вектора индукции поля:
⎛
⎞
3y21 - |r|2
μμ0 |M|
⎜
⎟
(2)
∇UB =
⎝ 3y1y2
⎠,
4π|r|5
3y1y3
7
а также тензора его градиента:
3μμ0 |M|
U = ∇∇TUB =
×
4π|r|7
⎛
⎞
-2y31 + 3y1y22 + 3y1y23
-4y21y2 + y32 + y2y23
-4y21y3 + y22y3 + y33
⎜
⎟
(3)
×⎝ -4y1y2 + y2 + y2y3 y1 - 4y1y2 + y1y3
-5y1y2y3
⎠.
-4y21y3 + y22y3 + y33
-5y1y2y3
y31 + y1y22 - 4y1y2
3
Пусть параметры магнитного поля в точке наблюдения определяются тензор-
ным градиентометрическим измерителем, система координат которого ориен-
тирована относительно источника поля произвольно. Определение парамет-
ров тензора градиента заключается в измерении значений поля в нескольких
точках пространства вблизи точки с радиус-вектором r [5].
Поставим задачу: зная величину и направление вектора дипольного маг-
нитного момента источника поля в связанной с ним системе координат, а так-
же располагая результатами измерений параметров тензора градиента поля
в области расположения точки наблюдения в системе координат измерителя,
определить параметры радиус-вектора между источником и измерителем по-
ля, а также направление вектора дипольного магнитного момента излучателя
в системе координат измерителя.
3. Позиционирование по измерениям тензора
градиента магнитного поля
Важные для решения задачи позиционирования параметры тензора (3)
могут быть получены измерением поля в пространственно разнесенных, од-
нако достаточно близких по отношению к расстоянию до источника, точках
пространства (чтобы можно было ограничиться линейным приближением за-
висимости изменения поля от расстояния).
Потенциал магнитного поля — гармоническая функция. Поэтому тен-
зор (3) симметричен, а его след равен нулю. Таким образом, он содержит
не девять, а всего пять независимых компонент. Более того, ортогональными
преобразованиями система координат измерителя может быть приведена к
главным осям тензора. В этой системе отличны от нуля только его диаго-
нальные элементы.
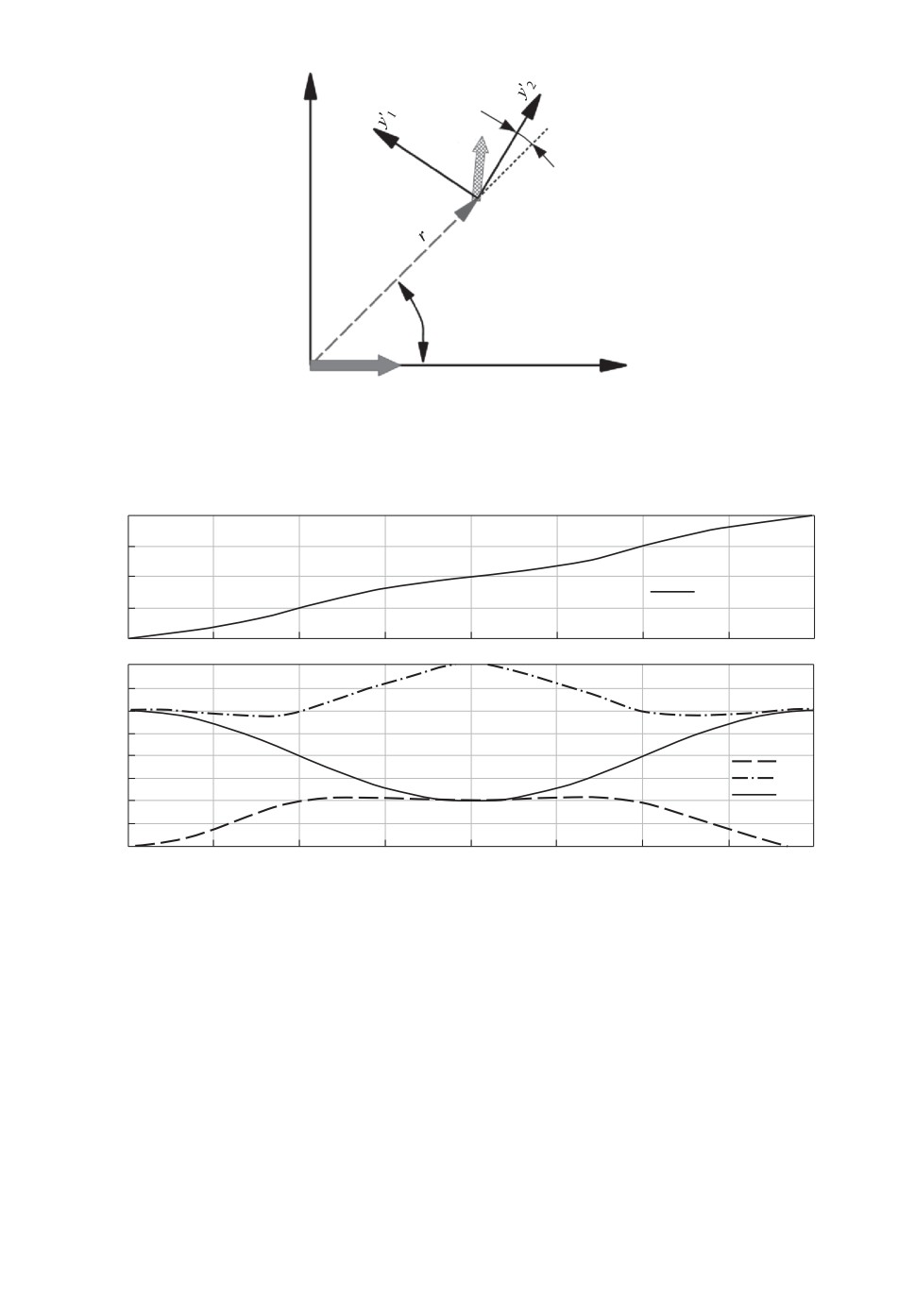
Угловое расхождение α систем координат главных осей тензора y′ и систе-
мы y определяется углом ϕ между вектором дипольного магнитного момента
и радиус-вектором r (рис. 2). При знании угла ϕ между радиус-вектором r и
направлением вектора M из (3) следует, что значения углов α и ϕ связаны
с соотношениями главных компонент тензора (рис. 3). Также из (3) следует,
что при повороте системы координат измерителя вокруг оси y3 на 180◦ зна-
чение тензора остается неизменным, только поменяются местами и сменят
знак его главные компоненты. Рисунок 3 это наглядно показывает.
Тот факт, что значения углов α и ϕ определяются одними и теми же со-
отношениями значений главных компонент тензора (угол α при этом опре-
деляется с точностью до 180◦), дает основания для определения по данным
8
y2
B
M
y1
Рис. 2. К параметрам тензора градиента поля точечного диполя: главные оси тен-
зора в точке измерения поля.
a
180
135
90
45
0
б
2,0
1,5
1,0
0,5
0
U11
0,5
U22
U33
1,0
1,5
2,0
0
45
90
135
180
225
270
315
360
Рис. 3. Зависимость параметров тензора от значения угла ϕ: а) — углового расхож-
дения систем координат (угол α), б ) — значений главных компонент тензора U′.
магнитоградиентных измерений направлений радиус-вектора r и вектора ди-
польного момента M. При известном значении абсолютной величины диполь-
ного магнитного момента может быть определено и расстояние между излу-
чателем и измерителем, что и составляет решение задачи относительного
позиционирования.
К сожалению, решение задачи позиционирования неоднозначно. Распола-
гая результатами измерений компонент тензора U′ в некой точке простран-
ства, задачу позиционирования диполя-излучателя в системе главных осей
тензора можно рассматривать следующим образом:
9
y2
M '''
M '
B '' B
B'
B ''
M
M ''
y1
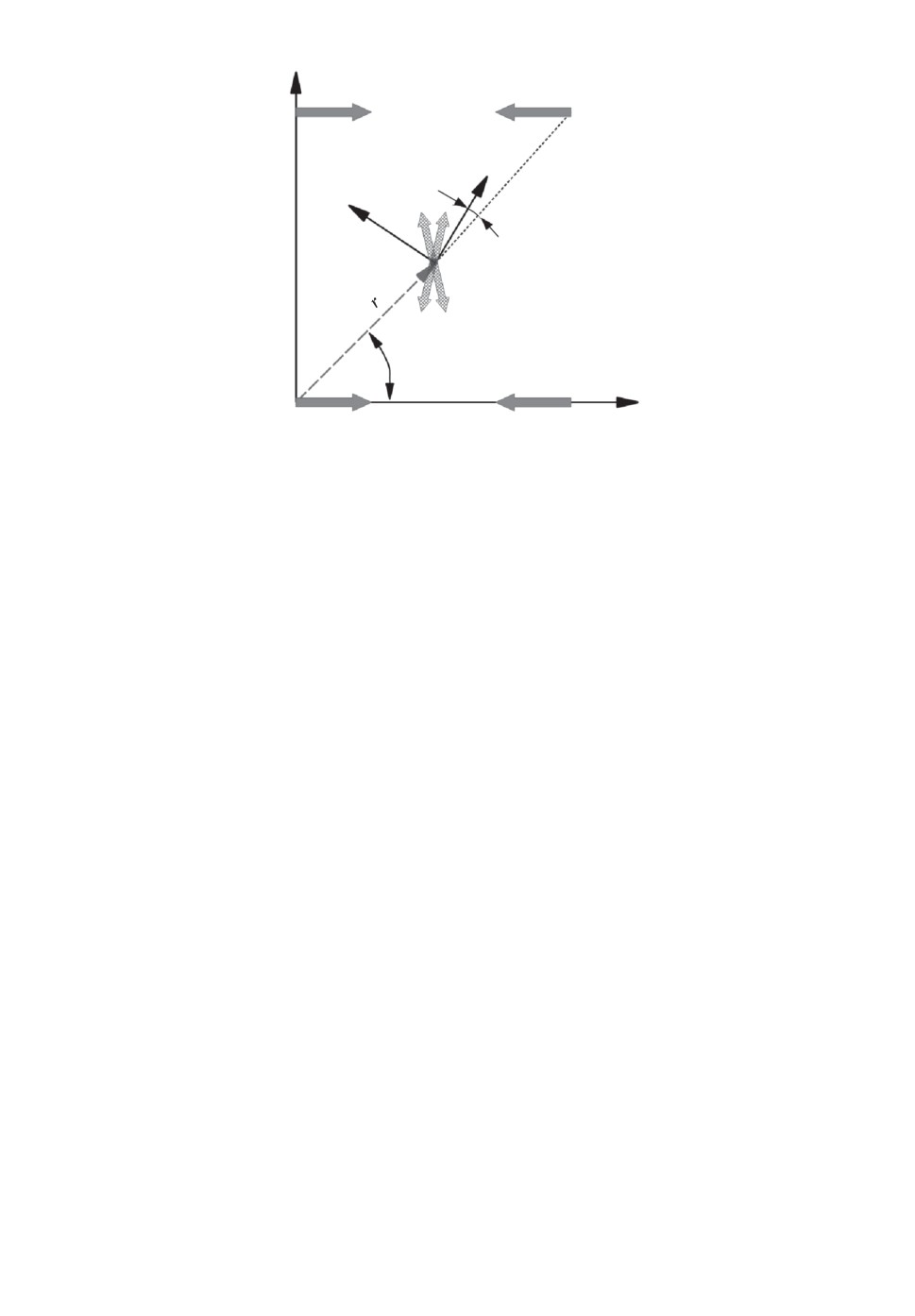
Рис. 4. Неопределенность при определении ДММ по измерениям тензора градиента
магнитного поля.
В интервале от 0◦ до 90◦ по ϕ компонента U′11, отвечающая значению вто-
рой производной по первой компоненте, максимальна по амплитуде и отрица-
тельна. Задав соответствующим образом направление первой оси, необходи-
мо так выбрать направление третьей, чтобы ей соответствовала минимальная
амплитуда градиента. Вторая ось дополняет тройку до правой.
В интервале от 90◦ до 180◦ по ϕ компонента U′22, отвечающая второй
производной по второй компоненте, максимальна по амплитуде и положи-
тельна. Задав соответствующим образом направление второй оси, необходимо
так выбрать направление третьей оси, чтобы ей соответствовала минималь-
ная амплитуда градиента. Направление первой оси должно задавать правую
тройку.
В интервале от 360◦ до 180◦ по ϕ компоненты тензора ведут себя так же,
как и в интервале от 0◦ до 180◦. Таким образом, угол ϕ можно определить
лишь с точностью до знака. При этом если для ϕ от 0◦ до 180◦ определяется
угол α, то для ϕ от 360◦ до 180◦ это угол — α.
В силу нечувствительности к повороту на 180◦ компоненты тензора гради-
ента определяют два возможных направления точки расположения диполей-
излучателей, которые могли бы создать измеренный градиент — M и M′. Эти
возможные излучатели расположены оппозитно относительно точки наблю-
дения, одинаковы по величине и противоположны по направлению. Кроме
того, результатам измерений так же отвечают еще два диполя M′′ и M′′′
в силу симметрии относительно оси диполя (рис. 4).
Таким образом, задача определения положения дипольного излучателя
по измерениям тензора градиента однозначно решается только в случае, ес-
ли априори известен квадрант его расположения. Из рис. 4 также видно,
что дополнительная информация о направляющих косинусах вектора поля B
позволит сразу же отбросить неверные гипотезы, а если считать известной
абсолютную величину дипольного магнитного момента излучателя, то со-
10
гласно (2) и (3) можно определить и расстояние до диполя, т.е. получить
необходимую информацию для решения задачи относительного позициони-
рования.
Заметим, однако, что результат измерений параметров тензора градиен-
та поля точечного излучателя инвариантен к повороту системы координат,
связанной с источником поля, вокруг оси, направление которой совпадает
с направлением вектора дипольного магнитного момента. Это означает, что
для определения взаимной угловой ориентации объектов проведенных изме-
рений недостаточно.
Для решения этой задачи может быть привлечена дополнительная инфор-
мация, для некоторых условий вполне органичная. Так, при сближении судна
с причалом, направления вертикальных осей в системах, связанных с источ-
ником поля и измерителем, можно считать совпадающими. Если источник
поля размещен на конусе заправочного шланга, а вектор дипольного момен-
та направлен вдоль него, то влияние поворота системы координат вокруг
вектора момента ничего не меняет с точки зрения процесса стыковки при
дозаправке в воздухе.
Полное же решение задачи позиционирования может быть получено, если
расположить на одном из взаимодействующих объектов не один, а несколько
дипольных излучателей. Техническая возможность выполнения корректных
измерений в этом варианте рассмотрена ниже.
4. Позиционирование с использованием векторного
магнитоградиентометра
Важно заметить, что на аппаратном уровне измерение компонент тензо-
ра (3) предполагает использование трех пространственно разнесенных век-
торных датчиков — измерителей индукции поля. Сегодня такого рода при-
боры характеризуются невысокими показателями точности.
Некоторым образом большей точностью обладают скалярные магниточув-
ствительные датчики, непосредственно измеряющие абсолютное значение ин-
дукции поля. Их функционирование основано на квантовых эффектах пре-
цессии атомов в поляризованном свете (квантовый магнитометр с оптической
накачкой) или протонов (протонный и оверхаузеровский магнитометры) [6].
В связи с этим интересно рассмотреть возможность определения простран-
ственного расположения и ориентации источника поля по результатам опре-
деления вектора градиента абсолютной величины вектора индукции магнит-
ного поля. Компоненты этого вектора могут быть измерены системой, со-
ставленной из четырех пространственно разнесенных скалярных датчиков.
Значение вектора градиента абсолютной величины индукции поля и тензора
градиента связаны соотношением
(
)
(4)
∇ |B| =
∇BT
(B/ |B|) .
√
Это соотношение получается при дифференцировании |B| =
BTB. Полу-
чается, что для решения задачи позиционирования по данным векторной гра-
диентометрии при измерениях необходимо определить не только скалярные
11
y2
B
B
M
y1
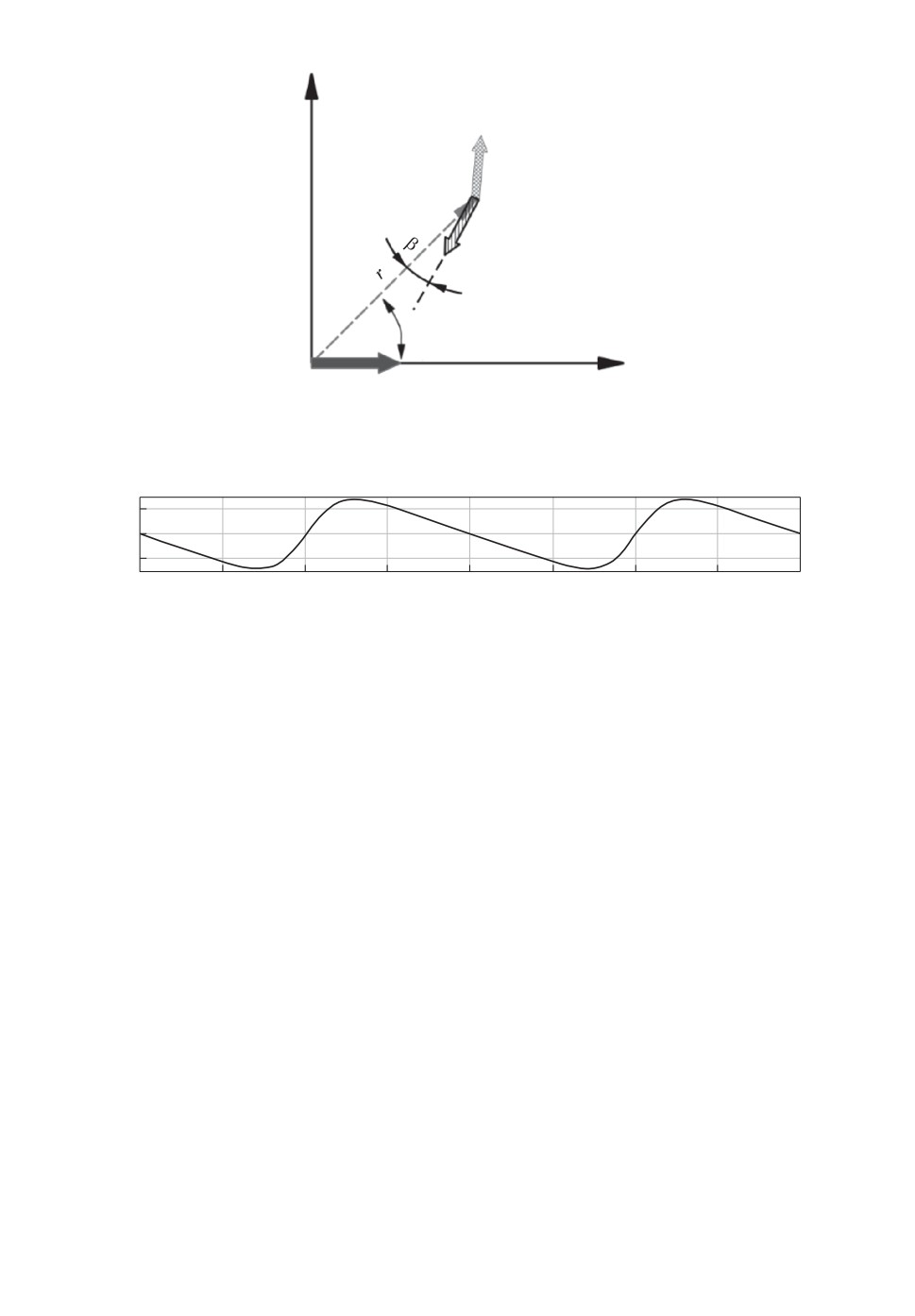
Рис. 5. Измерение поля и вектора градиента абсолютной величины вектора магнит-
ной индукции.
190
180
170
0
45
90
135
180
225
270
315
360
Рис. 6. Расхождение направлений радиус-вектора и вектора градиента.
значения поля в четырех точках, но и направление вектора поля (отношение
B/ |B| в (4)).
Расчеты показывают, что вектор градиента направлен преимущественно
в сторону источника (рис. 5). Величина углового расхождения β между век-
тором градиента и направлением на излучатель зависит от угла ϕ между
направлениями радиус-вектора r и вектора дипольного момента M. Макси-
мальное значение расхождения составляет порядка 15◦.
Зависимость углового расхождения β радиус-вектора и вектора градиен-
та от направления на диполь показана на рис. 6. Хорошо видно, что даже
при непосредственных измерениях вектора градиента задача определения на-
правления на диполь-излучатель решается хотя и грубо, однако без неодно-
значности, присущей тензорным измерениям.
По данным измерений вектора при известном значении дипольного маг-
нитного момента может быть вычислено расстояние до источника, но для
определения радиус-вектора необходима дополнительная информация. Эта
дополнительная информация может быть получена по серии измерений при
движении объектов друг относительно друга. Также можно использовать по-
казания нескольких разнесенных градиентометров. Поскольку осями симмет-
рии эквивалентных решений являются линии, проведенные через точку изме-
рений параллельно и перпендикулярно оси диполя, то уже для трех не лежа-
щих на одной прямой градиентометров результатом определения положения
12
источника будет единственная точка. Заметим, что такая схема, хотя и слож-
на технически, не требует задания величины дипольного момента источника,
т.е. позволяет не только избавиться от неоднозначности, но и локализовать
источник, определив при этом величину его дипольного момента.
5. Ограничения технической реализации
Выбор формы представления магнитоградиентной информации, а значит,
и способа измерений, и структуры магнитоизмерительной установки для ре-
шения задачи относительного позиционирования во многом определяется осо-
бенностями условий применения. Немалую роль играют особенности функ-
ционирования датчиков, динамика движения объектов, наличие помех в зоне
применения и многое другое. Однако важно, что кроме поля, обусловленного
работой искусственного диполя-излучателя, измеритель неизбежно регистри-
рует естественное магнитное поле земли, очень большое по величине, обыч-
но имеющее существенный градиент, а также непредсказуемо изменчивое во
времени под действием естественных геомагнитных возмущений.
Этот факт, тем не менее, не следует считать существенным препятствием
для приведения в действие рассмотренных выше методов и алгоритмов, по-
скольку в качестве источника поля можно использовать катушку индуктив-
ности (петлевой диполь), питаемую переменным током определенной фор-
мы. Такой подход позволяет использовать двух- и трехдипольный излуча-
тель, преодолев тем самым неоднозначность в определении направления на
источник в случае применения тензорного измерителя. Задача выделения на
приеме вектора поля каждого из излучателей в отдельности существенной
сложности не представляет.
Другого рода сложности в применении рассмотренных алгоритмов ока-
зываются связанными с особенностями функционирования магниточувстви-
тельных датчиков и, в первую очередь, влиянием магнитных помех в процес-
се измерений. Использование переменного магнитного поля позволяет при-
менить алгоритмы узкополосной фильтрации, что существенно уменьшает
это негативное влияние. Более того, указанный подход позволяет в качестве
измерителей использовать индукционные магнитометры, не способные изме-
рить постоянную составляющую поля, однако обладающие существенно более
высокой чувствительностью по отношению к датчикам других типов.
Важно также отметить, что рассмотренные алгоритмы являются базовы-
ми и не учитывают принципиально важных аспектов возможной технической
реализации. Так, источник поля предполагается локальным, а точнее, точеч-
ным дипольным излучателем. Однако технически реализуемый излучатель
неизбежно имеет ненулевой размер, а потому его поле отличается от поля
идеального диполя. Степень отличия по мере удаления уменьшается, однако
при значительном удалении существенно снижается амплитуда измеряемого
поля, в полной мере проявляются ограничения чувствительности и точности
датчиков, негативное влияние различных внешних помех.
Аналогичные сложности технической реализации характерны и для гради-
ентных измерителей поля. Само определение градиента как второй производ-
13
ной потенциала предполагает, что приращения вектора индукции поля вдоль
выделенных направлений измерены в точке на бесконечно малых приращени-
ях расстояния. В технической реализации даже при небольших расстояниях
между точками измерений поля расхождение значений, скажем, производ-
ной∂B∂x и отношения△B△x присутствует непременно и вследствие существенно
нелинейной зависимости величины поля от расстояния (|B| ∼ 1/ |r|3) неиз-
бежно растет по мере приближения к источнику поля. В этом же контексте
отдельного внимания заслуживает рассмотрение возможности использования
скалярных датчиков для построения векторного градиентометра. Высокоточ-
ные и высокочувствительные скалярные квантовые магнитометры с оптиче-
ской накачкой могли бы использоваться при малом расстоянии между ними
в структуре установки, однако их устройство таково, что приближение дат-
чиков друг к другу ближе 1,5 м радикально искажает показания. Не менее
важными факторами, способными разрушить стройную схему базовых алго-
ритмов, являются и другие несовершенства различных магниточувствитель-
ных датчиков и измерительной системы в целом: ориентационные ошибки,
различного рода нелинейности, температурный дрейф нулей и масштабных
коэффициентов и т.п.
6. Эксперименты по оценке точности определения
взаимного положения
Приведенные особенности технической реализации делают не вполне оче-
видной саму возможность приведения базовых алгоритмов в действие и объ-
ясняют стремление к проведению экспериментов, способных пролить свет на
реально достижимые возможности в части: требуемых характеристик дат-
чиков и измерительной системы в целом, доступного диапазона расстояний
между источником и измерителем поля, степени влияния различного рода
помех, потенциально достижимой точности определения геометрических па-
раметров, быстродействия. Для оценки технической реализуемости и под-
тверждения эффективности рассмотренных алгоритмов была проведена се-
рия экспериментов, задачей которых являлась оценка точности определения
расстояний и направлений в реальных условиях с учетом естественных маг-
нитных помех и ограниченной точности магниточувствительных датчиков,
а также ограниченной точности контроля дипольного магнитного момента
излучателя.
В качестве источника поля использовался петлевой излучатель — плоская
катушка индуктивности диаметром 500 мм, 100 витков, питаемая током в
форме меандра частотой 4 Гц. Амплитуда дипольного магнитного момента
составляла порядка 35 Ам2, для упрощения контроля направление вектора
было установлено горизонтальным. Магнитоградиентный измеритель тензор-
ного типа был составлен из трех векторных феррозондовых магнитометров
НВ0302 [7], обладающих чувствительностью на уровне 1,0-5,0 нТл. Датчики
устанавливались на вращающейся платформе в горизонтальной плоскости по
вершинам равностороннего треугольника с длиной ребра 1,0 м. Выполнению
экспериментов предшествовала серия калибровочных процедур, освещение
14
теоретических основ и технологии которых выходят за рамки темы данной
статьи. Последовательность же измерительных процедур в финальной схеме
эксперимента была представлена следующими сериями.
При известном расстоянии от центра треугольника магнитоградиентной
системы до источника поля (это расстояние составляло от 5 м) выполнялась
серия измерений, в которых магнитоградиентная измерительная установка
оставалась неподвижной, а петлевой излучатель, сохраняя свое расположение
в пространстве, последовательно изменял направление дипольного момента
в азимуте. Затем измерительная установка, оставаясь на месте, изменяла свое
положение в азимуте. Эта серия позволяла оценить точность определения на-
правления на источник и направления вектора его дипольного момента. Из-
мерения в этой последовательности были выполнены дважды. Первая часть
служила основанием для проведения процедур калибровки, а по данным дру-
гой осуществлялся контроль точности.
Вторая серия экспериментов заключалась в контроле точности определе-
ния расстояния до источника поля при различных направлениях вектора ди-
польного магнитного момента. Магнитоизмерительная установка оставалась
неподвижной, а петлевой излучатель с шагом 2,0 м отдалялся от измерителя
на расстояние от 5 до 13 м. В каждом положении выполнялось четыре из-
мерения при разных направлениях вектора дипольного магнитного момента.
В данной серии оценивалась точность определения расстояния до источника
на различных дистанциях и при различных направлениях вектора дипольно-
го момента.
В ходе экспериментов получены следующие результаты.
На рис. 7 показаны результаты эксперимента по определению расстояния
до источника по данным измерения градиента. По горизонтали отложены за-
данные значения расстояния между диполем-излучателем и измерительной
установкой, по вертикали — счисленные. Кривой показано счисленное значе-
ние, горизонтальными отрезками — осредненное для каждого из интервалов
времени, соответствующих удалению диполя от точки к точке с шагом 1,0 м.
Из рисунка видно, что расстояние до источника в представленной схе-
ме эксперимента вычисляется в целом достоверно. Небольшое расхождение
объясняется несовершенством условий эксперимента: существенным влияни-
ем магнитных помех в зоне измерений, а также погрешностью размещения
диполя-излучателя относительно измерительной системы. Результирующая
точность в данном эксперименте составила 4-9% в зависимости от величины
определяемого расстояния.
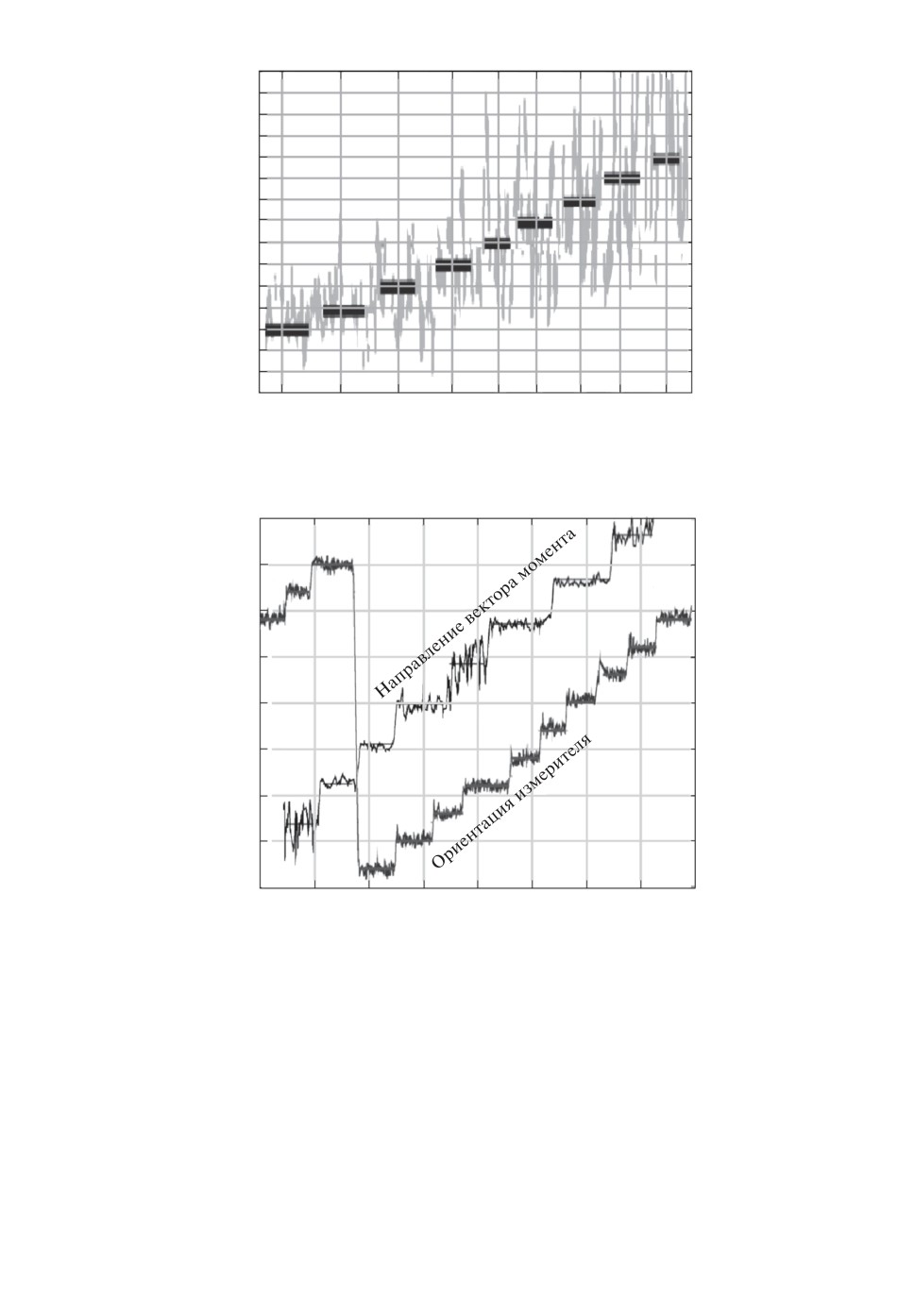
На рис. 8 приведены два графика, показывающие возможность опреде-
ления по данным магнитоградиентных измерений параметров взаимной уг-
ловой ориентации приемной системы и излучателя. На графиках показаны
результаты изменения во времени определения значений углов азимутальной
ориентации вектора дипольного магнитного момента (направление вектора
момента) и выделенной оси измерительной установки (ориентация измерите-
ля). Счисленные значения отложены по вертикальной оси. Отрезками пря-
мых на графиках показаны предустанавливаемые значения. Из рисунка хо-
15
d, м
14
13
12
11
10
9
8
7
6
5
4
3
5
6
7
8
9
10
11
12
13 м
Рис. 7. Вычисление расстояния до источника поля.
, град
150
100
50
0
50
100
150
Рис. 8. Вычисление параметров угловой ориентации.
рошо видно, что в данном эксперименте направление на диполь-излучатель
определено по результатам магнитоградиентных измерений в целом точнее,
чем направление вектора дипольного момента, однако, принимая во внима-
ние простоту схемы измерений, в целом показана достаточная достоверность
работы алгоритмов определения обоих направлений.
Результирующая точность определения ориентации измерителя составила
3-10◦ в зависимости от расстояния. Результирующая точность определения
направления вектора дипольного момента зависит не только от расстояния,
но и от ориентации измерителя. Она составила 10-30◦ в зависимости от рас-
стояния.
16
7. Заключение
Приведенное в работе исследование позволило сформулировать базовые
принципы перспективного метода относительного углового и пространствен-
ного взаимного позиционирования объектов. Приведенные расчеты показы-
вают принципиальную возможность построения конструктивно и функцио-
нально простых высокоточных систем, полезных для решения задач управ-
ления движением объектов при их взаимодействии: причаливании, стыков-
ке, дозаправки в воздухе, контроле положения корабля относительно якоря
и т.п. Проведенные на практике и кратко представленные в данной рабо-
те эксперименты подтвердили техническую возможность построения систем,
работающих на принципах рассмотренных в работе алгоритмов.
СПИСОК ЛИТЕРАТУРЫ
1. Оболенский Ю.Г., Похваленский В.Л., Чеглаков Д.И. Алгоритм автоматическо-
го управления летательным аппаратом при дозаправке топливом в воздухе //
Труды МАИ. 2013. Выпуск № 65. С. 1-17.
2. Небылов А.В., Перлюк В.В., Леонтьева Т.С. Исследование технологии взаим-
ной навигации и ориентации малых космических аппаратов в группе // Вест-
ник Самарского университета. Аэрокосмическая техника, технологии и машино-
строение. 2019. Т. 18. № 1. С. 88-93.
3. Колесников М.П., Мартынова Л.А., Пашкевич И.В., Шелест П.С. Метод пози-
ционирования автономного необитаемого подводного аппарата в процессе при-
ведения к причальному устройству // Изв. Тул. гос. ун-та. Технические науки.
2015. Вып. 11. Ч. 2. С. 38-48.
4. Ландау Л.Д., Лифшиц Е.М. Теоретическая физика. Т. II (Теория поля). М.:
Физматлит, 2022. 512 с.
5. Волковицкий А.К., Каршаков Е.В., Павлов Б.В. Магнитоградиентные измери-
тельные системы и комплексы: Монография в двух томах. Принципы измерений
и структура магнитоградиентных комплексов. Том I. М.: ИПУ РАН. 2018. 149 с.
6. Померанцев Н.М., Рыжков В.М., Скротский Г.В. Физические основы квантовой
магнитометрии. М.: Наука, 1972. 448 с.
7. Магнитные приборы. Преобразователь индукции магнитного поля трехкомпо-
нентный НВ0302 [Электронный ресурс]: — Сайт производителя — Электронные
свободный — (дата обращения 15.07.2023).
Статья представлена к публикации членом редколлегии В.М. Глумовым.
Поступила в редакцию 19.06.2023
После доработки 17.07.2023
Принята к публикации 02.08.2023
17