Автоматика и телемеханика, № 12, 2023
© 2023 г. А.Д. ЦВИРКУН, д-р техн. наук (tsvirkun@ipu.ru),
А.Ф. РЕЗЧИКОВ, д-р техн. наук (rw4cy@mail.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва),
В.А. КУШНИКОВ, д-р техн. наук (kushnikoff@yandex.ru)
(Федеральный исследовательский центр
«Саратовский научный центр РАН»),
О.И. ДРАНКО, д-р техн. наук (olegdranko@gmail.com)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва),
А.С. БОГОМОЛОВ, д-р техн. наук (alexbogomolov@yandex.ru),
А.Д. СЕЛЮТИН (aseliutin@ya99.ru)
(Федеральный исследовательский центр
«Саратовский научный центр РАН»)
МОДЕЛИ И МЕТОДЫ ПРОВЕРКИ ДОСТИЖИМОСТИ ЦЕЛЕЙ
И ВЫПОЛНИМОСТИ ПЛАНОВ В КРУПНОМАСШТАБНЫХ
СИСТЕМАХ НА ПРИМЕРЕ ЦЕЛЕЙ И ПЛАНОВ
ЛИКВИДАЦИИ ПОСЛЕДСТВИЙ НАВОДНЕНИЯ
Разработаны модели и методы проверки достижимости комплекса це-
лей и выполнимости планов мероприятий, осуществляемых при управ-
лении крупномасштабными системами. Сформирован алгоритм анализа
достижимости целей и планов, реализуемых в процессе развития этих си-
стем. Приведен пример, иллюстрирующий основные этапы проверки до-
стижимости комплекса целей и выполнимости планов мероприятий при
ликвидации последствий наводнения.
Ключевые слова: цели, управление, модели, методы, алгоритмы, систем-
ная динамика, мероприятия, критерий эффективности, наводнения, про-
верка выполнимости планов, искусственный интеллект.
DOI: 10.31857/S000523102312005X, EDN: NGBYEJ
1. Введение
Вопросам изучения моделей и методов формирования и проверки дости-
жимости поставленных целей при управлении сложными человеко-машин-
ными, социальными, экономическими и биологическими системами уделяется
значительное внимание. В настоящее время проверка достижимости комплек-
са целей, осуществляемых при планировании, проектировании и управлении
крупномасштабными системами, недостаточно формализована и выполняет-
ся в основном с использованием интуиции и опыта лиц, принимающих ре-
шения (ЛПР). Характеристики целей различных уровней иерархии, а также
индикаторов их выполнения могут значительно изменяться на временных ин-
тервалах реализации целей, что затрудняет деятельность ЛПР при проекти-
ровании, управлении крупномасштабными системами, а также при планиро-
49
вании результатов их деятельности. Вопросы формализации процедуры целе-
полагания обсуждались в трудах отечественных и зарубежных исследовате-
лей [1, c. 5]. Полученные в данной области исследования результаты, однако,
пока не привели к созданию целостного комплекса моделей и методов, позво-
ляющего проверить достижимость целей крупномасштабных систем. Отсут-
ствие данных разработок, а также специализированного математического и
информационно-программного обеспечения, предназначенных для проверки
достижимости целей крупномасштабных систем, а также планов их создания
и развития, понимаемых как ряд действий, объединенных последовательно
для достижения цели с возможными сроками выполнения, вызывает слож-
ности при разработке и управлении человеко-машинными, экономическими,
социальными объектами [2, c. 252].
Данная статья посвящена разработке новых задач, моделей и методов про-
верки достижимости целей и выполнимости планов в крупномасштабных си-
стемах.
2. Основные направления исследований
Для разработки моделей и методов проверки достижимости целей и вы-
полнимости планов в крупномасштабных системах необходимо выполнить
следующие исследования.
1. На основе математического аппарата системной динамики, вероятност-
ного анализа безопасности и теории байесовских сетей разработать методо-
логические основы для создания интеллектуальной системы, позволяющей
прогнозировать, идентифицировать и предотвращать события, приводящие
к невыполнимости планов мероприятий [3, c. 168].
2. Сформировать и обосновать общий подход к проверке выполнимости
структурно-сложных планов, предусматривающий анализ выполнимости с
помощью аппарата булевых функций, байесовских сетей и моделей представ-
ления знаний интеллектуальных систем, а также с использованием систем-
но-динамического подхода и уравнений системной динамики [4, c. 21].
3. Разработать модели и методы для интеллектуальной системы
поддержки принятия решений, предназначенной для анализа выполни-
мости структурно-сложных планов мероприятий с использованием ло-
гико-вероятностных моделей, байесовских сетей, системно-динамического
подхода, математического аппарата вероятностного анализа безопасности и
теории глубоких нейронных сетей.
4. Разработать методики, позволяющие представить проверяемый план в
виде иерархической причинно-следственной модели, а также сформировать
индикаторы его выполнимости.
5. Создать модели и методы оперативной проверки достижимости целей
и выполнимости планов с помощью аппарата динамических графов и моде-
лей представления знаний, отличающихся возможностью анализа планов на
длительных временных интервалах в динамике, что позволит своевременно
50
изменять планы крупномасштабных систем при возникновении их невыпол-
нимости.
6. Разработать постановки задач, моделей и методов для проверки вы-
полнимости структурно-сложного плана мероприятий с использованием
системно-динамического подхода. План мероприятий представляется в виде
причинно-следственной сети событий, моделируемыми переменными являют-
ся показатели, характеризующие выполнение отдельных мероприятий плана,
дугами - причинно-следственные связи, существующие между этими показа-
телями. Записывается система дифференциальных уравнений, определяют-
ся начальные условия, соответствующие желательным величинам указанных
показателей. Если сформированная система уравнений при выбранных на-
чальных условиях имеет решение и оно расположено в заданном диапазоне,
то проверяемый структурно-сложный план выполним.
7. Предложить и обосновать методики проведения вычислительных экспе-
риментов, характеризующих возможности применения разработанного мате-
матического обеспечения при проверке выполнимости структурно-сложного
плана мероприятий по развитию отечественной энергетики.
8. Создать и апробировать проблемно-ориентированную интеллектуаль-
ную систему поддержки принятия решений, реализующую основные резуль-
таты данного исследования.
3. Постановка задачи
Постановка задачи проверки выполнимости планов функционирования
промышленных предприятий и организаций в содержательном и формаль-
ном виде приведена в [5-8]. В статье данная постановка распространена на
цели крупномасштабных систем и планы по их реализации. Она имеет сле-
дующую формулировку.
Разработать модели и методы проверки достижимости целей и выпол-
нимости планов, используемых в крупномасштабных системах на различ-
ных временных интервалах в процессе их создания и функционирования;
определить возможные причины, препятствующие решению данной зада-
чи и предложить способы их устранения. Решение этой проблемы позво-
лит создать методологическую основу для разработки интеллектуальных си-
стем с целеполаганием, использование которых при управлении крупномас-
штабными комплексами значительно повысит эффективность их функциони-
рования.
4. Общий подход к решению
Представим проверяемый план в виде дерева, содержащего конъюнктив-
ные и дизъюнктивные вершины. Возможность такого преобразования выте-
кает из его иерархической структуры (конъюнктивные вершины) и условий
выполнения отдельных мероприятий Mi ∈ {M1, . . . , Mn}. Каждой вершине
51
графа G поставим в соответствие переменную gi, i = 1, n, принимающую зна-
чение единица при выполнении мероприятия Mi и значение ноль при его
невыполнении. В основу разработанного метода решения положены следую-
щие утверждения.
Утверждение 1. В момент времени t0 ∈[th,tk], план P(x,u)∈{P(x,u)}
будет невыполним, если на выходе хотя бы одной цепочки конъюнктивных
и/или дизъюнктивных вершин, соединяющей любую терминальную вершину
дерева G с его корневой вершиной, выполняется gi = 0 [9, с. 15].
Справедливость данного утверждения вытекает из того, что если хотя бы
одно мероприятие плана, входящее в состав конъюнктивной цепочки, не вы-
полнено, то будет не выполнен и весь план, так как в противном случае со-
ответствующую данному мероприятию вершину необходимо исключить из
графа как не влияющую на выполнение плана. Это утверждение являет-
ся необходимым условием выполнимости P (x, u) ∈ {P (x, u)}, утверждающим,
что для выполнимости плана должно быть выполнено каждое его мероприя-
тие Mj ∈ {M1, . . . , Mn}, без выполнения которых соответствующее мероприя-
тие Mj ∈ {M1, . . . , Mn} не выполнимо.
Утверждение 2. Допустим, что в момент времени t0 ∈[th,tk] суще-
ствуют невыполненные мероприятия Mj ∈ {M1,... ,Mn}, входящие в со-
став цепочек дерева G, соединяющих корневую вершину с терминальны-
ми. Тогда план P(x,u)∈ {P(x,u)} в данный момент времени будет невы-
полним, если существует не менее одного сечения дерева G, на выходе
конъюнктивно-дизъюнктивной цепочки которого gi = 0.
При проектировании и управлении крупномасштабными системами по-
ставленная цель или разработанный для ее выполнения план считаются до-
стигнутыми, если выполнены требования приведенных выше утверждений.
Проблема использования такого подхода к проверке выполнимости целей
заключается в том, что границы числового диапазона определяются ЛПР,
как правило, на основе опыта и интуиции исходя из конъюнктурных сооб-
ражений с использованием во многом неполных и субъективных представ-
лений о системе изменяющихся во времени причинно-следственных связей,
существующих между отдельными индикаторами, при недостаточном уче-
те влияния возмущений окружающей среды и т.д. Все это приводит к то-
му, что план P (x, u) ∈ {P (x, u)} может оказаться невыполнимым в отдельные
моменты времени, наступление которых весьма трудно предсказать заранее
[10, с. 123].
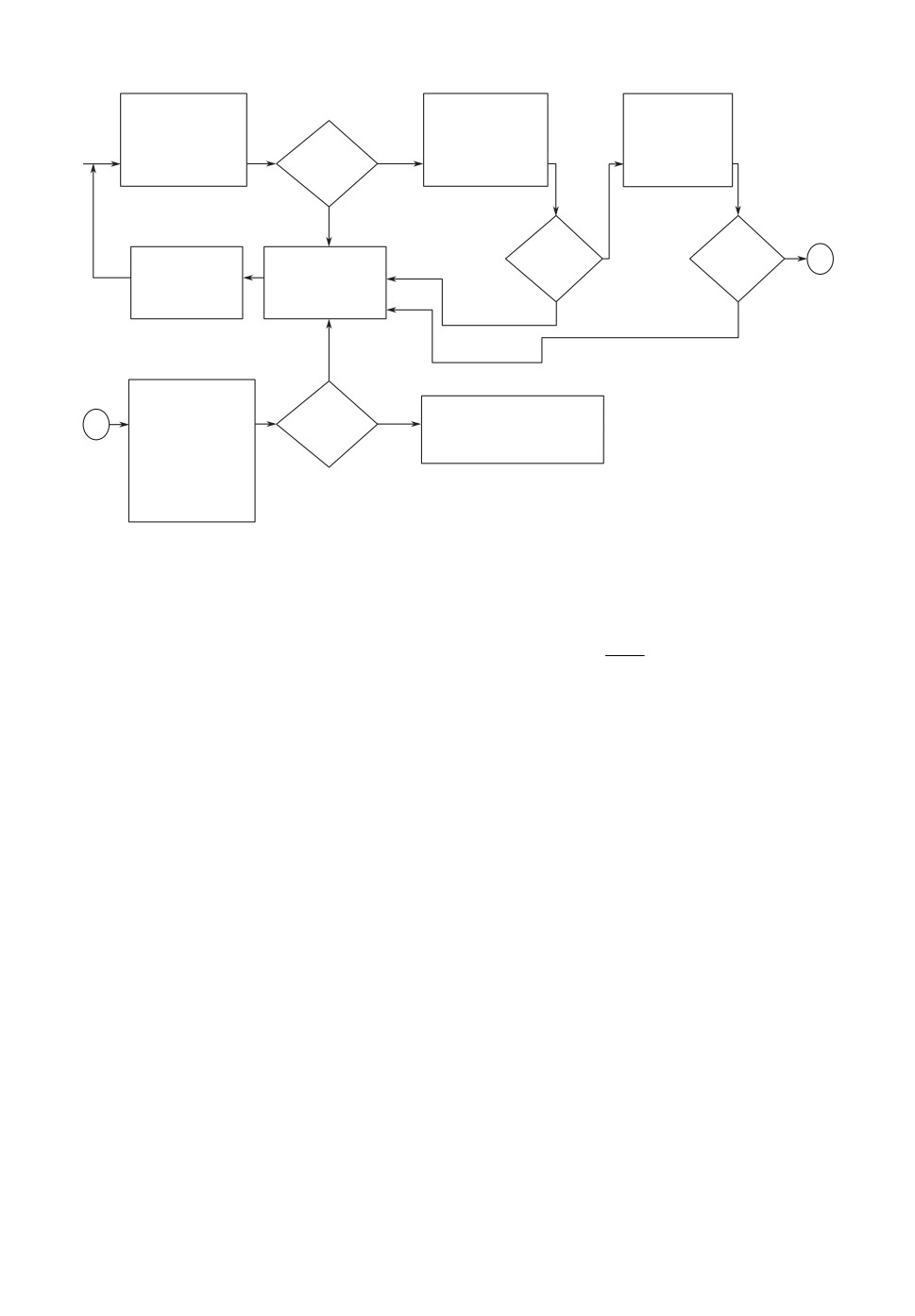
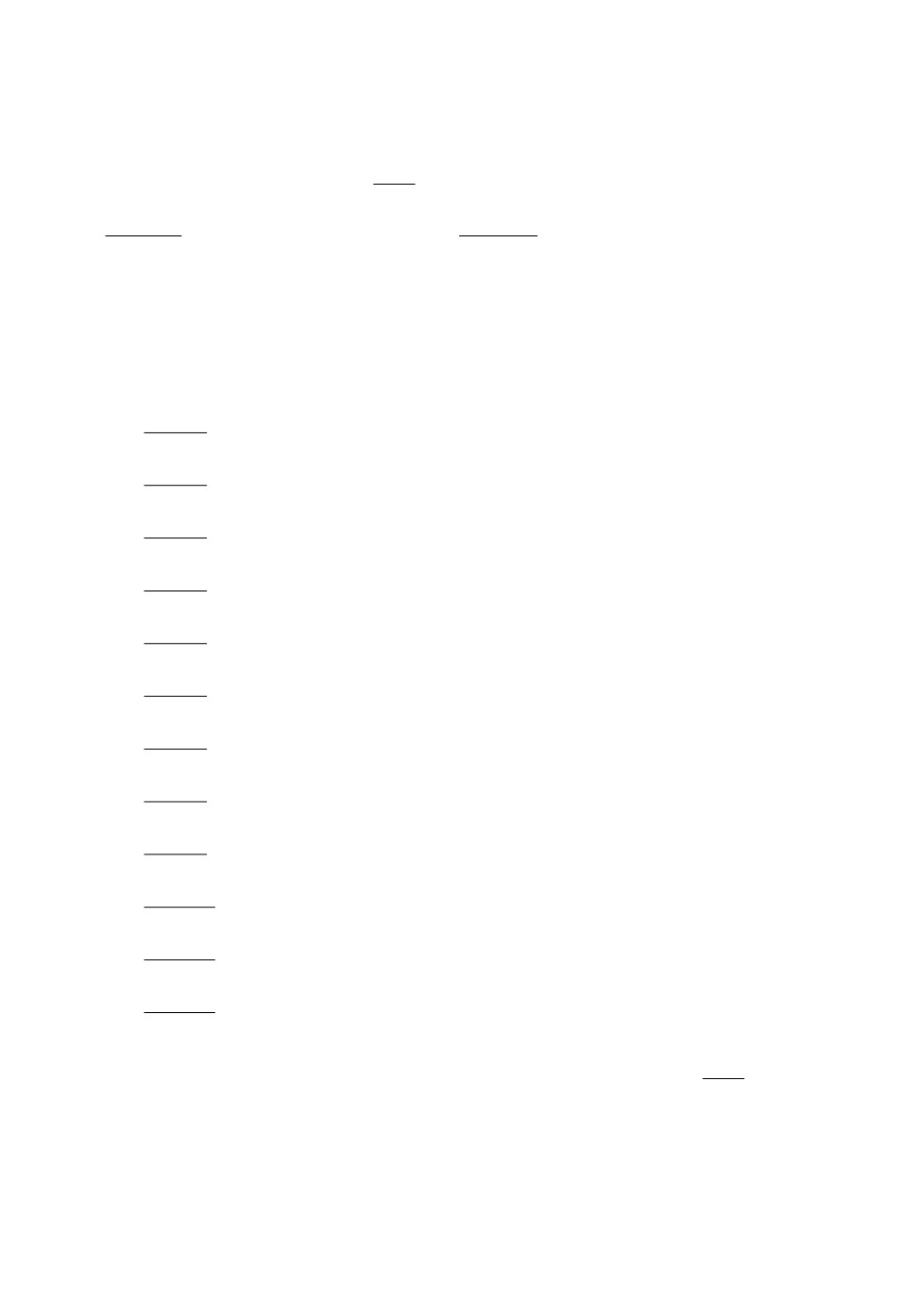
Вышеизложенное позволяет представить основные этапы проверки дости-
жимости целей и выполнимости планов в виде схемы (рис. 1).
Следующая гипотеза формирует достаточное условие для проверки плана
при использовании системы индикаторов.
Предложение 1. План P(x,u)∈{P(x,u)} будет достигнут на задан-
ном интервале времени ΔT , если известна система индикаторов его дости-
52
Этап 1
Этап 2
Этап 3
Проверка
Проверка
Проверка
выполнения
выполнения
выполнения
утверждения 1
да
утверждения 1
гипотезы
Выполнено?
(условие 1)
да
Выполнено?
Выполнено?
А
Коррекция
Определение
нет
цели
причин
и/или плана
невыполнения
нет
Этап 4
Проверка
выполнимости
да
Проверенный план
А
Выполнено?
целей и/или
или цель выполнимы
планов с
на T
помощью
традиционных
методик
Рис. 1. Основные этапы проверки достижимости целей и выполнимости планов.
жимости l1, . . . , lm, для которой выполняется:
(1)
∃ti ∈ΔT : minli ≤ li ≤ max li
, i = 1,m,
где min li, max li - нижняя и верхняя граница изменения индикатора li со-
ответственно; m - известная константа.
Эта гипотеза широко применяется ЛПР при проверке достижимости це-
лей на различных уровнях иерархии управления крупномасштабными систе-
мами. Данное обстоятельство подтверждает возможность ее использования
при разработке компьютерной системы с проверкой достижимости целей и
выполнимости планов [11, с. 75].
На первом этапе проверяется выполнение утверждения 1; если в конъюнк-
тивных цепочках, соединяющих терминальные вершины с концевой, не вы-
полнено хотя бы одно мероприятие, то цель или план невыполнимы и требу-
ют коррекции. На втором этапе проверяется требование к целям и планам,
исключающее возможность одобрения плана, невыполнимого из-за неблаго-
приятного сочетания событий (утверждение 2). На третьем этапе проверки
устанавливается, попадут ли для всех t0 ∈ [th, tk] все значения индикаторов
l1(t0),... ,lm(t0) в допустимый диапазон. При проверке этого условия исполь-
зуется аппарат системной динамики, так как на индикаторы влияет большое
число линейных и нелинейных обратных связей, а также изменяющиеся во
времени возмущения окружающей среды. На четвертом этапе для проверки
достижимости планов и выполнимости целей применяется математический
аппарат [12, с. 240].
53
5. Алгоритм проверки выполнимости плана мероприятий
и достижимости цели
Алгоритм 1.
1. Начало алгоритма.
2. На графе G∗(U, E) задать вершину u∗, имеющую нулевую полустепень
захода. Эта вершина соответствует вершинам M1 или Z1, характеризующим
выполнение плана мероприятий или достижение генеральной цели соответ-
ственно.
3. На графе G∗(U, E) задать все вершины um0 , uk0 , . . . , ul0 ∈ U, которым ин-
цидентна u∗. В формируемую продукционную модель добавить первое усло-
вие: план M или цель Z1 будут выполнены при выполнении мероприятий или
целей, соответствующих вершинам um0 , uk0 , . . . , ul0 .
4. Выполнять шаг 2 до тех пор, пока не будут достигнуты вершины графа
G∗(U, E) с нулевой полустепенью исхода, полностью построить продукцион-
ную модель.
5. Системе продукций поставить в соответствие логическую функцию
f (u1k, . . . , uvk), принимающую значение 0, если план не выполнен, или 1 в
противном случае.
6. Построить схему цифрового дискретного устройства DU (ЦДУ), исполь-
зуемого для определения значений f(u1k, . . . , uvk), а также функцию индика-
тора find(C, C1), характеризующего степень выполнения плана мероприятий
или достижения генеральной цели.
7. Подать на вход DU бинарные сигналы, характеризующие выполнение
или невыполнение отдельных мероприятий проверяемого плана или целей
анализируемой целевой структуры. При find(C, C1) = 1 план выполним или
цель достижима; если find(C, C1) = 0, то необходимо осуществить их коррек-
цию.
8. Переходя по ветвям распространения нулевых сигналов устройства DU,
определить причины невыполнимости плана или недостижимости цели и со-
общить о них ЛПР.
9. Определить, выполняются ли условия использования уравнений Колмо-
горова-Чепмена для расчета вероятности невыполнения плана мероприятий
или недостижимости цели. Если нет, то перейти к шагу 10.
10. Определить минимальные сечения Li, i = 1, . . . , m, характеризующие
невыполнение плана или недостижение цели из-за неблагоприятного стече-
ния обстоятельств. Каждое из минимальных сечений характеризует одно из
сочетаний относительно малозначимых событий, приводящих в своей сово-
купности к недостижимости цели и невыполнимости плана.
11. Решая систему линейных однородных уравнений Колмогорова-Чеп-
мена для каждого минимального сечения, определить вероятность осуществ-
ления неблагоприятного стечения обстоятельств Pi, i = 1, . . . , m.
54
12. Если выполняется условие Pi ≥ ε, i = 1, . . . , m, то выдать сообщение
о высокой вероятности недостижимости цели и невыполнимости плана из-за
неблагоприятного сочетания событий Li, i = 1, . . . , m, выдать рекомендации
ЛПР, изменить проверяемую цель или план и перейти к шагу 7.
13. Выбрать систему индикаторов Ii, i = 1, . . . , h, характеризующих вы-
полнимость проверяемого плана или достижимость цели. Определить реле-
вантные связи между индикаторами, которые могут иметь как линейный,
так и нелинейный характер. Установить возмущения среды, влияющие на
индикаторы.
14. Определить предельные значения индикаторов I∗i, i = 1, . . . , h, дости-
жение которых означает наличие выполнимости проверяемого плана или ре-
ализуемости поставленной цели.
15. Составить систему нелинейных дифференциальных уравнений в нор-
мальной форме Коши, характеризующей изменение системы индикаторов во
времени с учетом их взаимного влияния и воздействия возмущений среды.
16. Решить систему уравнений одним из численных методов при заданных
начальных условиях. Если полученные решения выходят за область, ограни-
ченную I∗i, i = 1, . . . , h, то выдать сообщение ЛПР, рекомендовать действия,
по устранению несоответствия и перейти к шагу 10.
17. Выдать сообщения ЛПР, что проверка не выявила недостижимость
цели или невыполнимость плана.
18. Конец алгоритма.
6. Проверка достижимости цели и выполнимости плана мероприятий
с использованием системно-динамического подхода
и уравнений системной динамики
Рассмотрим особенности реализации отдельных этапов процесса проверки
достижимости целей и выполнимости планов крупномасштабной системы на
примере плана по устранению последствий наводнений и паводков [13-16].
Постановка задачи имеет следующую формулировку:
Задача 1. Разработать формальные модели и алгоритмы, позволяю-
щие на временном интервале t ∈ [t0; tN ] определить, не выходят ли инди-
каторы достижимости цели Xi(t, a(t), p(t)), i = 1, n за заданные пределы,
т.е. Xi(t,a(t),p(t)) ≥ Xmini, i = 1,n. Если данное выражение не выполняет-
ся хотя бы для одного индикатора, то план считается невыполнимым из-за
невозможности достигнуть требуемой величины данного показателя.
Значение индикаторов определяется из решения системы нелинейных
дифференциальных уравнений
dXi(t, p(t), a(t))
= f(t,a(t),X1(t,p(t)),...,Xn(t,p(t))), i = 1,n
dt
55
ax
, i = 1,n, где X∗i - реко-
мендуемые значения характеристик последствий наводнения, Xi(t, a(t), p(t)),
i = 1,n - характеристики последствий наводнения, влияющие на величину
ущерба, γi - весовой коэффициент i-й характеристики, a(t) - вектор пара-
метров внешней среды.
6.1. Математическая модель
Объект моделирования описывается системой нелинейных дифференци-
альных уравнений первого порядка.
dXi(t, a(t), p(t))
(2)
= f+i(F1,... ,Fm) - f-i(F1,... ,Fm
), i = 1, n,
dt
где f+i, f-i, i = 1, n - темпы, непрерывные или кусочно-непрерывные функ-
ции, определяющие положительную и отрицательную скорость изменения
значения системной переменной Xi(t, a(t), p(t)), i = 1, n. Функции f+i, f-i,
i = 1,n - это функции от факторов Fj, j = 1,m, при этом Fj могут быть
системными переменными или параметрами внешней среды.
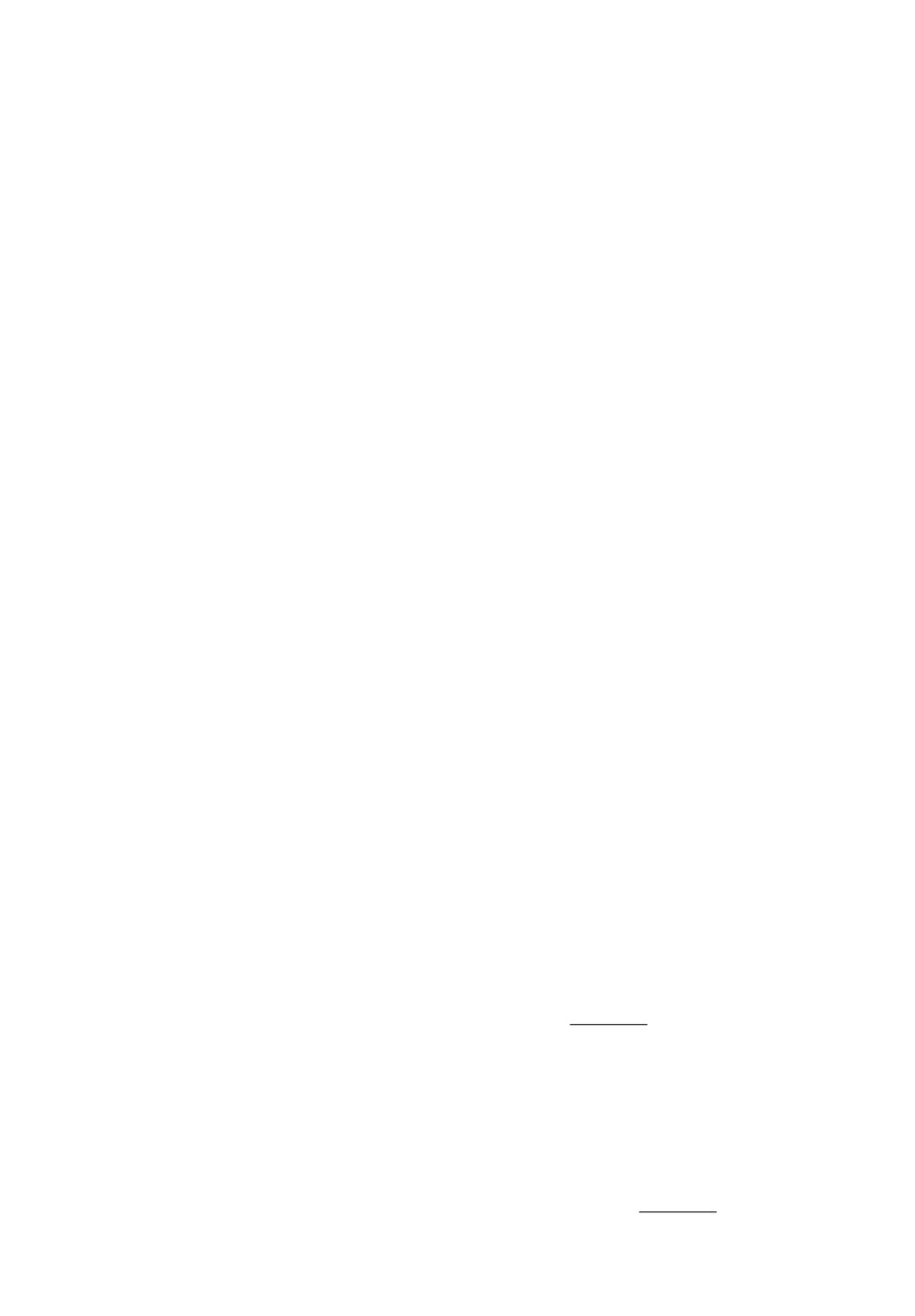
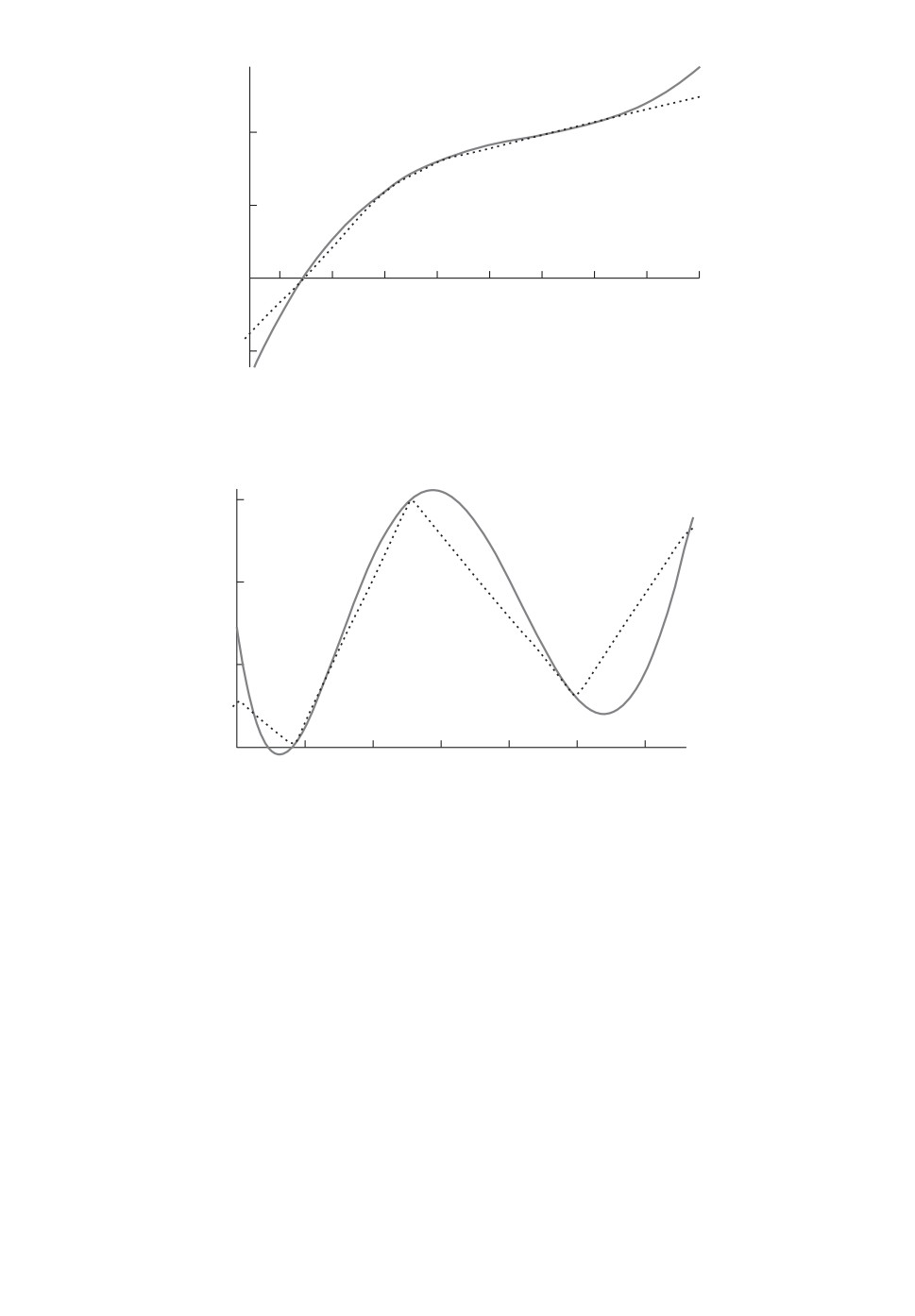
Релевантные взаимосвязи между переменными модели показаны на ори-
ентированном графе причинно-следственных связей (рис. 2).
X1
X5
X9
S(t)-
I(t)-доля площади
F(t)-
площадь
сельскохозяйст-
скорость
F(t)-
зоны
A(t)-плотность
венных сетей
течения
скорость
затопления
течения
транспортных
сетей
X2
X6
X10
G(t)-
T(t)-температура
глубина
Q-
F(t)-
воды
скорость
воды
продолжительность
G(t)-
течения
глубина
воды
+
+
+
X3
X7
X11
D(t) -
плотность
T(t)-температура
населения
S(t)-площадь
зоны
воды
Р - плотность
затопления
населения СФ
С-балансовая
стоимость ОСФ
+
+
+
F(t)-
X4
X8
X12
скорость
течения
Рис. 2. Причинно-следственные связи между переменными модели.
56
Предположим, что функции правой части (2) имеют вид
∑
∏
f+/-i(F1,... ,Fn) =
k+/-
(Fj ),
i,l
,l
l=1
j=1
где коэффициенты k+/-i,l, i = 1, 12 определяются на этапе адаптации модели
к объекту исследования. Допустим также, что коэффициенты ki,l = 0, l =
= 1, m - 1, ki,l = 0, l = m, ki,l = 0, l = m + 1, n, тогда это выражение примет
вид f+/-i(F1, . . . , Fn) = k+/- ∏nij=1 fFji (Fj ) - системные переменные или пара-
метры внешней среды.
С учетом вышеизложенного и исходя из анализа графа причинно-следст-
венных связей разрабатываемая математическая модель будет иметь общий
вид:
⎧
dX1(t)
⎪
⎪
=k+1fS1(S(t))fX81(X8(t)),
⎪
dt
⎪
⎪dX2(t)
⎪
=k+2F(t)G(t)tfS2(S(t))fX82(X8(t)) - k2
2
(X1(t))fX72 (X7(t)),
⎪
dt
⎪
dX3(t)
⎪
⎪
=k+3fX83(X8(t))
3
(X1(t))fX73 (X7(t)),
⎪
dt
⎪
⎪dX4(t)
⎪
=k+4F(t)G(t)T(t)fX84(X8(t))
4
(X7(t))fX14(X1(t)),X1(t)),
⎪
dt
⎪
⎪dX5(t)
⎪
(X7(t)),
=k+5A(t)fS5(S(t)) - k-5fX15(X1(t))
5
⎪
dt
⎪
⎪dX6(t)
⎨
=k+6fS6(S(t))fX86(X8(t)),
dt
(3)
⎪dX7(t)
⎪
⎪
=k+7fX17(X1(t)),
dt
⎪
⎪dX8(t)
⎪
⎪
=k+8D(t)fS8(S(t)) - k-8fX48(X4),
dt
⎪
⎪dX9(t)
⎪
(X7(t)),
⎪
=k+9I(t)fS9(S(t)) - k-9fX19(X1(t))
9
dt
⎪
⎪dX10(t)
⎪
(X7(t)),
⎪
0
0
dt
⎪
⎪
dX11(t)
⎪
(X6(t)),
⎪
1
⎪
dt
⎪
X12(t)
⎩d
(X11(t)),
2
dt
где fXij - функциональная зависимость системной переменной Xj (t) от си-
стемной переменной Xi, а fSj - зависимость Xj от S(t), i, j = 1, 12. Если не
существуют готовые формулы, устанавливающие зависимость между систем-
ными переменными, то для определения функциональных зависимостей fXij
и fSj на основе статистических данных экспертами или разработчиками мате-
матического обеспечения строятся кусочно-линейные функции, которые, как
показывает практика, могут быть аппроксимированы полиномами.
57
С учетом полиномов вспомогательных зависимостей математическая мо-
дель примет следующий вид:
⎧
⎪dX1(t)
1
⎪
=
(k+1(0,001S3(t) - 0,04S2(t) + 0,6S(t) - 2,1)×
⎪
dt
Xmax
1
⎪
⎪×(54X48(t) - 137X38(t) + 103,4X28(t) - 20,7X8(t) + 1,2)),
⎪
⎪
⎪dX2(t)
1
⎪
=
(kt(-0,02S3(t) + 0,64S2(t) - 6,4S(t) + 21)(-14,5X28(t) +
⎪
dt
Xmax
⎪
2
⎪
+ 22,5X8(t) - 3,3) - k-2 (0,57X21(t) + 0,276X1(t) + 0,05)×
⎪
⎪
⎪×(-3,3X27(t) + 5,6X7(t) - 0,13)),
⎪
⎪
⎪dX3(t)
1
⎪
=
(k+3(3,28X28(t) - 23,31X8(t) + 12,3)(-1,26X21(t) +
⎪
dt
3
Xmax
⎪
⎪
+ 10,1X1(t) - 17,8)(-0,33X27 + 2,2X7 - 0,26)),
⎪
⎪
⎪
dX4(t)
1
⎪
=
(k+4F (t)G(t)T (t)(-1,3X48(t) + 1,92X38(t) - 0,95X28(t) +
⎪
dt
Xmax
⎪
4
⎪
+ 0,3X8(t) + 0,7)(-0,42X47(t) - 7,19X37(t) + 19,34X27(t) - 15,1X7(t) +
⎪
⎪
⎪
+ 4,435)(X31(t) - X21(t) + 1,5X1(t) + 0,02)),
⎪
⎪
dX5(t)
1
⎪
⎪
=
(k+5A(t)(0,01S2(t) - 0,1S(t) + 0,5) - k-5(0,217X21(t) -
⎪
dt
Xmax
5
⎪
⎪
- 0,505X1(t) + 0,3(-0,304X27(t) + 1,1X7(t) + 0,26))),
⎪
⎪
⎨
dX6(t)
1
=
(k+6(0,002S2(t) + 0,056S(t) + 0,48)(-0,05X38(t) +
(4)
dt
Xmax
⎪
6
⎪
+ 0,9X28(t) - 0,02X8(t) + 0,23)),
⎪
⎪
⎪
dX7(t)
1
⎪
=
(k+7(3,5X31(t) - 5,3X21(t) + 3,27X1(t) + 0,0003)),
⎪
dt
Xmax
⎪
7
⎪
dX8(t)
1
⎪
=
(k+8D(t)(0,18S3(t) - 0,06S2(t) + 0,77S(t) - 1,77) -
⎪
dt
Xmax
⎪
8
⎪
⎪
- k-8 (2,17X24(t) - 0,0024X4(t) + 0,16)),
⎪
⎪
dX9(t)
1
⎪
⎪
=
(k+9I(t)(0,002S2(t) + 0,07S(t) + 0,5) - k-9(0,43X31(t) -
⎪
dt
Xmax
9
⎪
⎪
- 2,3X21(t) + 3,2X1(t) - 0,07)(1,15X37(t) - 1,78X27(t) + 0,93X7(t) - 0,024)),
⎪
⎪
⎪
dX10(t)
1
⎪
=
(k+10F (t)G(t)T (t)(-0,0007S4(t) + 0,03S3(t) - 0,46S2(t) +
⎪
dt
Xmax
10
⎪
⎪
+ 2S(t) - 0,4)(0,25X31(t) - 1,24X21(t) + 2,04X1(t) - 0,049) ×
⎪
⎪
× (10,9X37(t) - 26,57X27(t) + 16,7X7(t) - 0,515)),
⎪
⎪
⎪
dX11(t)
1
⎪
=
(k+11P CF (t)G(t)D(t)(-0,0005S3(t) + 0,02S2(t) -
⎪
dt
Xmax
⎪
11
⎪
⎪
- 0,01S(t) + 0,4)(-3,5X36(t) + 7,8X26(t) - 2,7X6(t) + 0,25)),
⎪
⎪
⎪
dX12(t)
1
⎩
=
(k+12(-45,3X411(t) + 111,95X311(t) - 84,07X211(t) + 20,04)),
dt
Xmax12
где t0 = 1, Xi(t0) = Xi0, i = 1, 12.
58
X 1
1,0
0,5
0
4
6
8
10
12
14
16
18
20
S
0,5
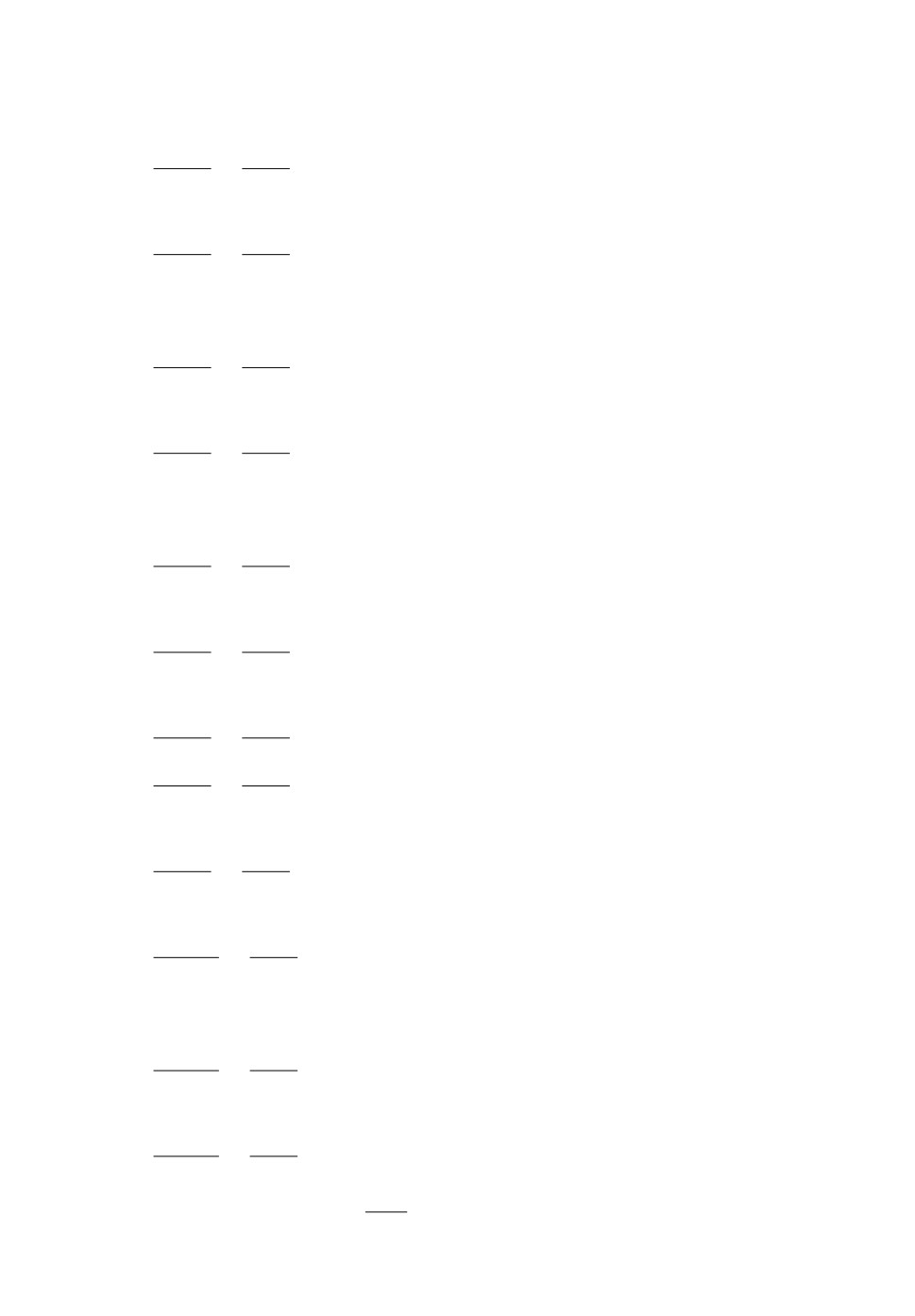
Рис. 3. Графики кусочно-линейной функции и полинома для fS1.
X 1
3
2
1
0
0,2
0,4
0,6
0,8
1,0
1,2
X 8
Рис. 4. Графики кусочно-линейной функции и полинома для fX81 .
Система дифференциальных уравнений (4) представляет собой задачу Ко-
ши, она может быть решена одним из численных методов. Для удобства пред-
ставления полученных результатов моделируемые характеристики системы
нормировались относительно максимальных значений.
Используя статистические данные по наводнению, происшедшему в При-
морье в 2001 г., построим полиномы вспомогательных зависимостей fXij и
j
На рис. 3 и 4 представлены построенные полиномы
fS1 = 0,001S3(t) - 0,04S2(t) + 0,6S(t) - 2,1 и
fX81 = 54X8(t) - 137X8(t) + 103,4X8(t) - 20,7X8(t) + 1,9
для функциональных зависимостей fS1 и fX81 соответственно.
Разработанные математические модели позволяют решить задачу 1, как
это показано при описании модельного примера.
59
7. Модельный пример
Используем построенную модель для проверки выполнимости плана по
ликвидации последствий наводнений и паводков.
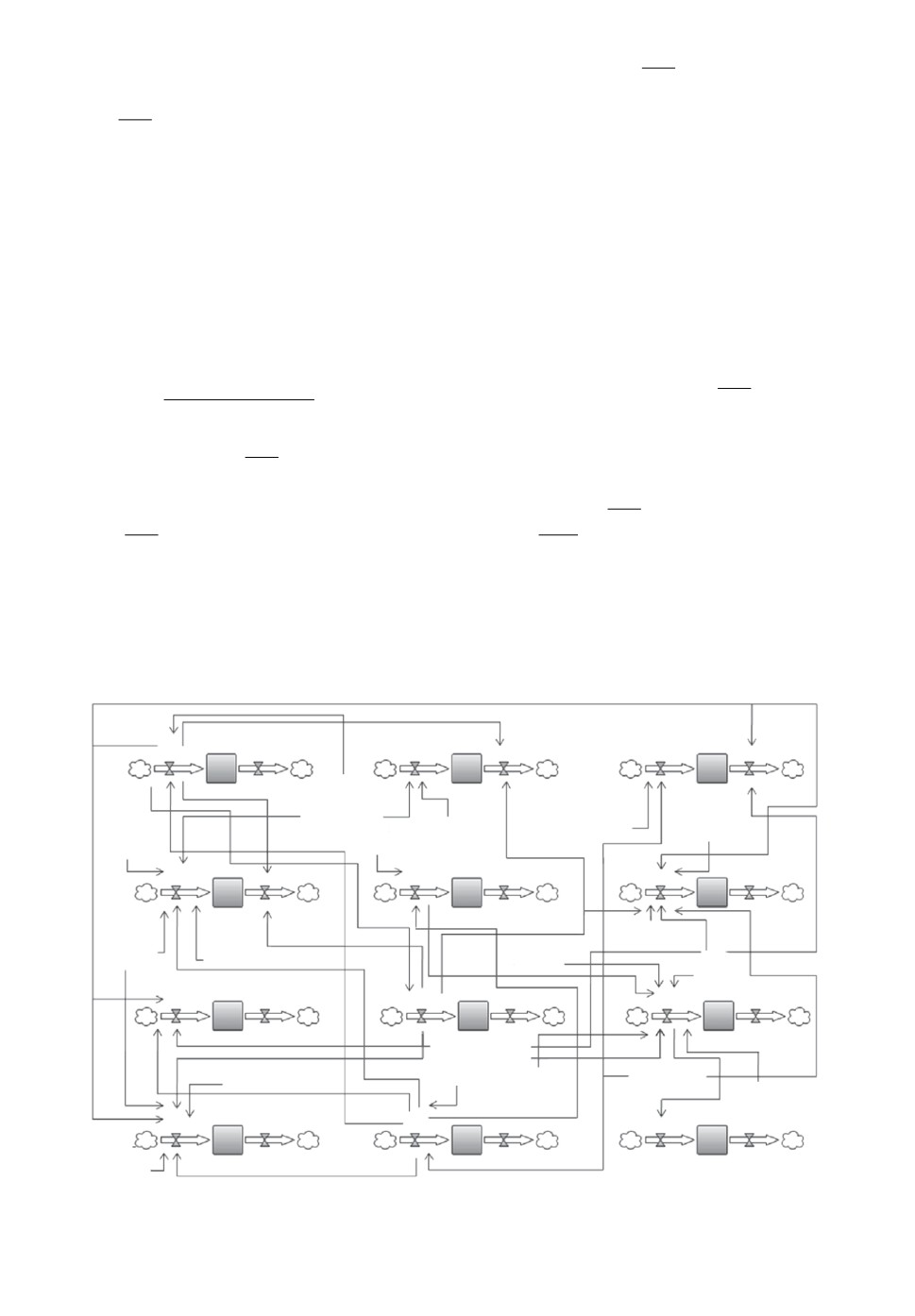
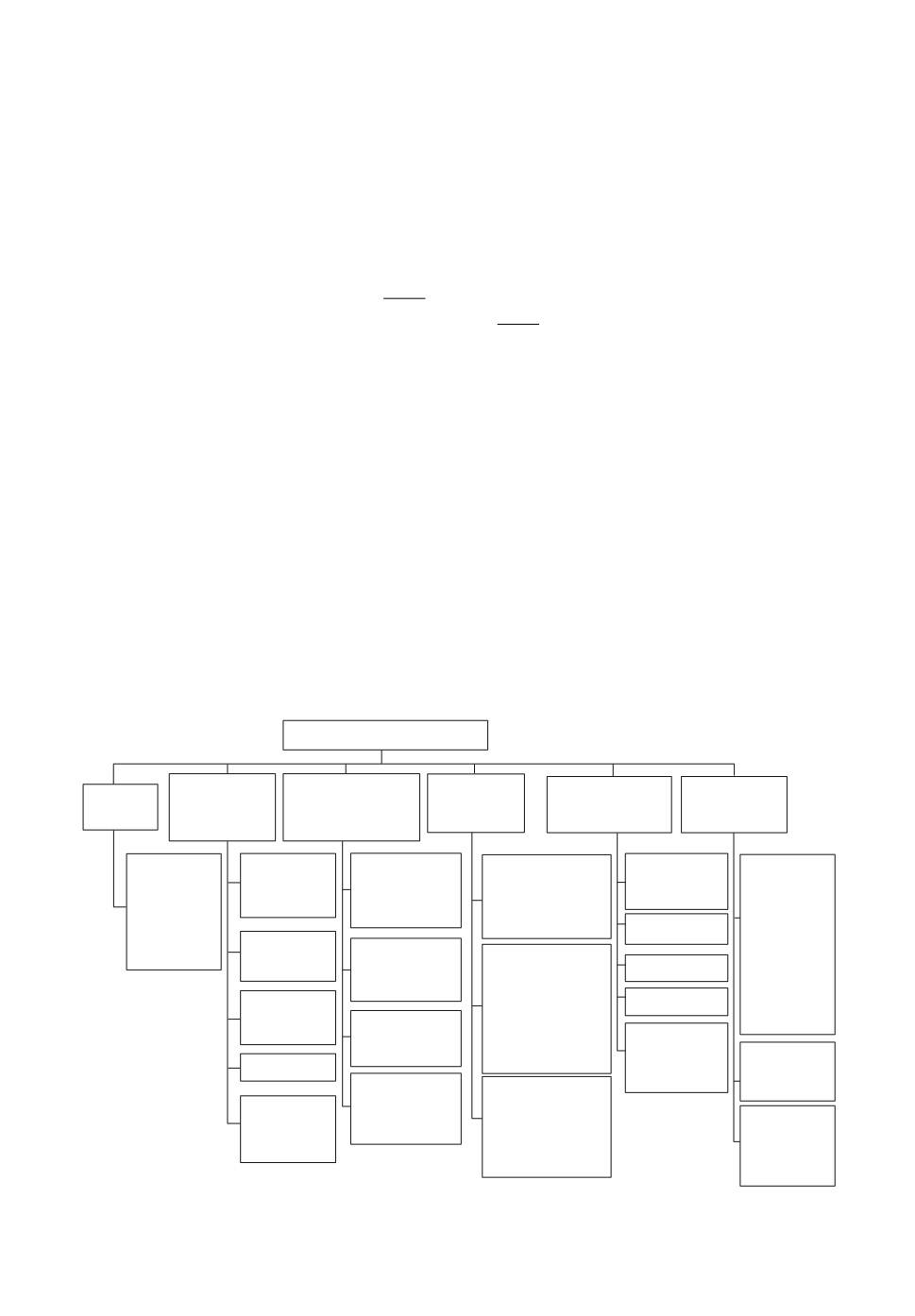
Для уменьшения потерь от их возникновения в различных регионах Рос-
сии разработан план, верхний уровень которого приведен на рис. 5.
Пример 1. Для достижения большей наглядности примем, что провер-
ка выполнимости плана проводится на интервале машинного времени [0; 1],
в качестве индикаторов выполнимости выбраны нормированные величины
переменных модели Xi(t), i = 1, 13. Результаты решения системы уравнений
при начальных условиях Xi(t0) = 0,5; i = 1, 13 приведены на рис. 6. Они по-
казывают, что план мероприятий оказывается невыполнимым в момент ма-
шинного времени t = 0,56. На остальном временном интервале проверяемый
план выполним. Минимальные значения индикаторов, при которых план бу-
дет выполнимым, показаны на рис. 6 серыми линиями, текущие значения
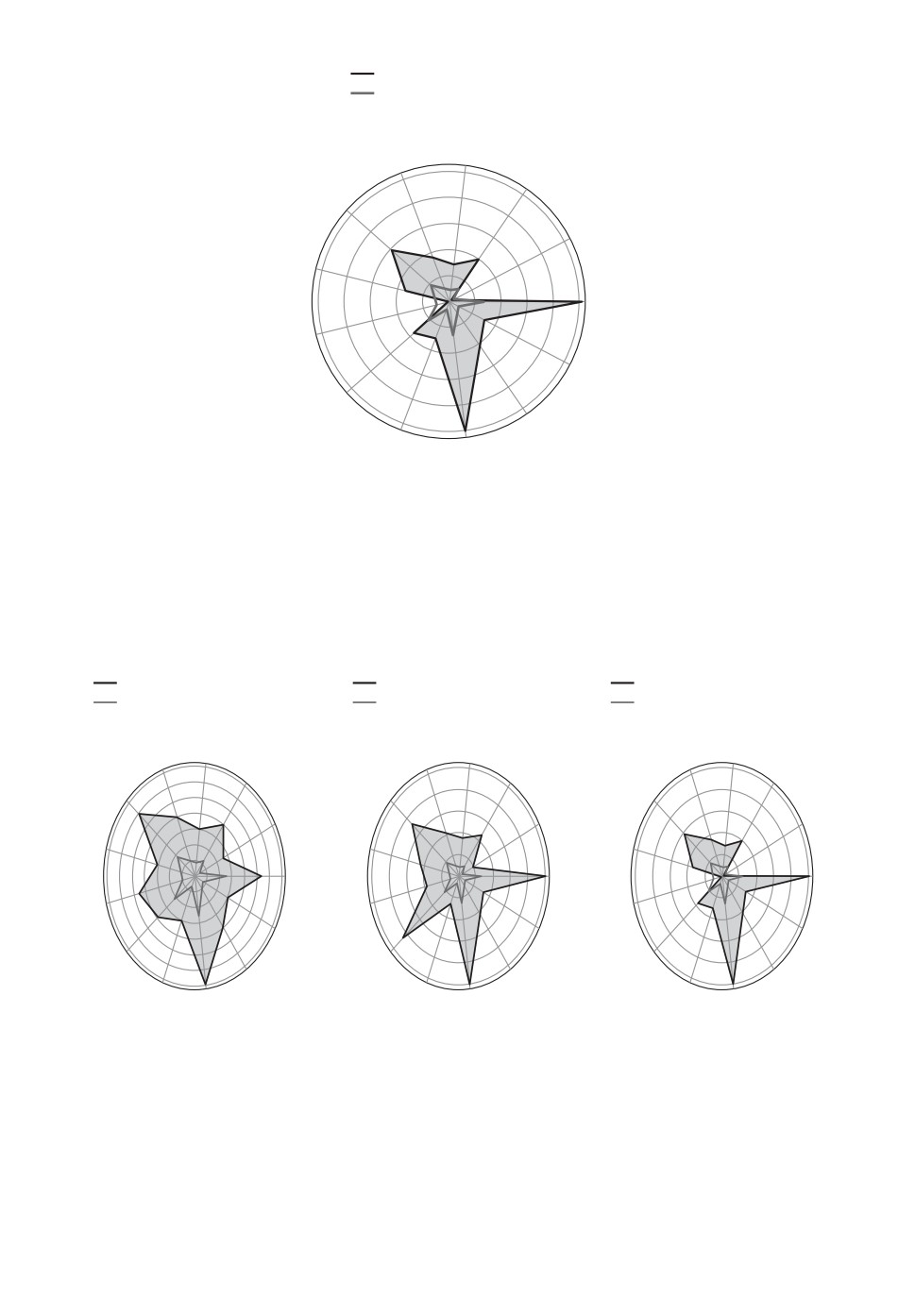
индикаторов - черными линиями. На рис. 7 приведены результаты про-
верки выполнимости трех альтернативных планов ликвидации последствий
наводнений и паводков, указаны моменты времени, когда эти планы являются
выполнимыми, невыполнимыми и когда существует опасность невыполнения
плана.
Проверки выполнимости различных планов ликвидации последствий на-
воднений показывают, что при решении задач управления крупномасштаб-
ными системами необходимо обязательно проверять на выполнимость план,
реализующий наиболее предпочтительную стратегию управления. Этот план
План мероприятий p1 ta
Подсыпка и
Подготовка мер
Дренирование
Вывод, вывоз,
укрепление
территорий
Подготовка сил и
Защита
по отводу паводковых
перегон
средств для
берегозащитных
вод, дноуглубительные
(по результатам
сельскохозяйственных
низководных
сооружений
изысканий и
ликвидации
мостов
и русловыпрямительные
животных в
(ограждение дамб,
работы
проектирования)
безопасные места
последствий
обваловок и т.п.)
Обследование
Наличие
Контроль за
Изучение
Определение
Создание,
состояния,
технических
состоянием
геоморфологических,
безопасных мест
экипировка
укрепление
решений на
береговой линии,
гидрогеологических
резмещения
и оснащение,
конструкций из
проведение
набережных в
и инженерно-
животных
подготовка,
соображений
работ
черте населенных
геологических условий
аттестация
рациональности
пунктов
осваиваемых
профессио-
решения и
территорий
Транспортное
нальных,
места в
Определение
обеспечение
нештатных
транспортной
мест выемки
Использование
аварийно-
схеме
грунта, бутовых
местных строитель-
Проведение специаль-
спасательных
ных изысканий на
Обеспечение
сил и средств
материалов и пр.
ных естественных
и искусственных
участках слабопрони-
кормами
на базе
цаемых и набухающих
предприятий,
материалов
Определение
грунтов, со слабо
Обеспечение
ведомств
подрядных
развитой эрозионной
охраны
федеральных и
организаций на
Завоз материалов
сетью, неглубоким
территориаль-
производство
и контрукций для
залеганием водоупор-
ных органов
работ
производства работ
ных слоев с неровной
Обеспечение
(в случае
кровлей, затрудненным
сбора и
поверхностным и
транспортировки
Поддержание
Планирование
необходимости)
подземным стоком
к местам
в готовности
работ
потребления
аварийно-
Контроль за
Сооружение перехва-
сельхозпродукции
спасательных
своевременностью
тывающих, пластовых,
служб
Обеспечение
выполнения работ
горизонтальных,
материально-
(готовность к
вертикальных, при-
Планирование
техническими
паводкому
стенных и
действий,
ресурсами работ
периоду)
сопутствующих дре-
отработка
по реконструк-
нажей, противофиль-
взаимодействия,
ции ГТС
трационных
проведение
экранов и завес
учений и
тренировок
Рис. 5. План мероприятий по ликвидации последствий наводнений.
60
Актуальные значения
Область невыполнения плана
t = 0,56
X4
X5
X3
X6
X2
1,0
X7
0,8
0,6
0,4
0,2
X1
X8
X13
X9
X12
X10
X11
Рис. 6. Выполнимость плана мероприятий в различные моменты машинного време-
ни.
План p0a
План p1a
План p2a
План выполним
Опасность невыполнения
План невыполним
Актуальные значения
Актуальные значения
Актуальные значения
Область невыполнения плана
Область невыполнения плана
Область невыполнения плана
t = 0
t = 0,12
t = 0,56
X4
X4
X4
X5
X5
X5
X3
X3
X3
0,2
X6
X6
X6
X2
X2
X2
0
,7
1,0
1
,0
X7
0,5
X7
0,8
X7
0,8
0,6
0,6
0,3
0,4
0,4
0,2
0,2
0,2
X1
X1
X1
X8
X8
X8
X13
X13
X13
X9
X9
X9
X12
X12
X12
X10
X10
X
10
X11
X11
X11
Рис. 7. Проверка выполнимости планов по ликвидации последствий наводнений.
должен быть обязательно выполним в любой точке рассматриваемого интер-
вала времени. При отсутствии выполнимости плана хотя бы в одной точке
предпочтение следует отдать стратегии управления, план реализации кото-
рой будет выполним на всем временном интервале управления.
61
8. Заключение
Разработаны модели и методы проверки достижимости целей и выпол-
нимости планов, осуществляемых при управлении крупномасштабными си-
стемами в процессе их развития. Предложен и обоснован алгоритм анализа
достижимости комплекса целей и планов, реализуемых при управлении эти-
ми системами. Сформированы утверждения и гипотезы, позволяющие ма-
шинным способом проверить выполнимость планов. Приведен модельный
пример, подтверждающий возможность проверки выполнимости планов при
ликвидации последствий наводнения с помощью разработанных моделей и
методов.
В процессе управления развитием крупномасштабных систем целесообраз-
но использовать контуры управления, осуществляющие проверку достижи-
мости поставленных целей и выполнимости планов на выбранном интервале
времени. При отсутствии данной проверки выбранная траектория развития
крупномасштабной системы в отдельные моменты времени может оказаться
нереализуемой, что приведет к срыву выполняемых работ, а также к значи-
тельным затратам человеческих, финансовых, технических и других видов
ресурсов на реализацию заведомо невыполнимых планов.
СПИСОК ЛИТЕРАТУРЫ
1.
Васильев С.Н. От классических задач регулирования к интеллектуальному
управлению I // Известия Академии Наук. Теория и системы управления. 2001.
№ 1. С. 5-22.
2.
Пупков К.А., Воронов Е.М., Коньков В.Г. Методы классической и современной
теории автоматического управления. М.: МГТУ им. Н.Э. Баумана, 2004. C. 252.
3.
Кушников В.А., Резчиков А.Ф., Цвиркун А.Д. Управление в человеко-машин-
ных системах с автоматизированной процедурой коррекции целей // АиТ. 1978.
№ 7. С. 168-175.
4.
Панов А.И. Целеполагание и синтез плана поведения когнитивным агентом //
Искусственный интеллект и принятие решений. 2018. № 2. С. 21-35.
5.
Склемин А.А., Кушников В.А. Анализ выполнимости планов мероприятий при
управлении промышленным предприятием // Известия вузов. Поволжский ре-
гион. Технические науки. 2012. № 4 (24). С. 18.
6.
Склемин А.А., Кушников В.А., Резчиков А.Ф. Модели и алгоритмы проверки
выполнимости планов мероприятий при управлении промышленным предприя-
тием // Вестник СГТУ. 2012. Т. 3. № 1 (67). С. 145.
7.
Пшеничников И.С., Кушников В.А., Шлычков Е.И., Резчиков Д.Ф. Анализ вы-
полнимости планов мероприятий в системе автоматизированного управления
мостостроительной организацией // Мехатроника, автоматизация, управление.
2006. № 11. С. 45.
8.
Щербаков М.А., Кушников В.А. Анализ выполнимости деревьев целей при
управлении информационной безопасностью предприятий и организаций //
Вестник СГТУ. 2013. № 4 (73). С. 136.
9.
Новиков Д.А. Теория управления организационными системами. М.: МПСИ.
2005. № 2. С. 15-23.
62
10. Белов М.В., Новиков Д.А. Управление жизненными циклами организационно-
технических систем. М.: URSS, ООО «ЛЕНАНД». 2020. № 2. С. 123-153.
11. Цвиркун А.Д., Резчиков А.Ф., Кушников В.А., Иващенко В.А., Филимо-
нюк Л.Ю., Богомолов А.С., Хамутова М.В. Управление процессом ликвидации
последствий наводнений на промышленных объектах и территориях // Управ-
ление большими системами: сборник трудов. 2020. № 83. С. 75-106.
12. Бродский Ю.И. Лекции по математическому и имитационному моделирова-
нию // Ю.И. Бродский. М.-Берлин: Директ-Медиа, 2015. С. 240.
13. Гейда А.С., Лысенко И.В. Оценивание показателей операционных свойств си-
стем и процессов их функционирования // Труды СПИИ РАН. 2013. № 2 (25).
С. 317-337.
14. Давтян А.Г., Шабалина О.А., Садовникова Н.П., Парыгин Д.С. Моделирова-
ние нарративного управления в социально-экономических системах // Вестник
МГТУ им. Н.Э. Баумана. Серия Приборостроение. 2022. № 1 (138). С. 85-99.
15. Яхнин Е.Д. Проблема целеполагания // Вопросы философии. 2020. № 5. С. 5-11.
16. Костюк Ф.В. От вычисления показателей боевой эффективности до теории ис-
следования операций и неантагонистических игр: научное наследие профессора
Юрия Борисовича Гермейера // Известия РАН. Теория и системы управления.
2019. № 2. С. 30-40.
Статья представлена к публикации членом редколлегии А.И. Михальским.
Поступила в редакцию 26.05.2023
После доработки 18.09.2023
Принята к публикации 30.09.2023
63