Автоматика и телемеханика, № 2, 2023
Управление в социально-экономических
системах
© 2023 г. Г.А. УГОЛЬНИЦКИЙ, д-р физ.-мат. наук (ougoln@mail.ru),
А.Б. УСОВ, д-р техн. наук (abusov@sfedu.ru)
(Южный федеральный университет, Ростов-на-Дону)
СРАВНИТЕЛЬНЫЙ АНАЛИЗ ЭФФЕКТИВНОСТИ
СПОСОБОВ ОРГАНИЗАЦИИ ВЗАИМОДЕЙСТВИЯ
ЭКОНОМИЧЕСКИХ АГЕНТОВ В МОДЕЛЯХ ДУОПОЛИИ
КУРНО С УЧЕТОМ ЭКОЛОГИЧЕСКИХ УСЛОВИЙ
Проводится сравнительный анализ эффективности способов организа-
ции взаимодействия экономических агентов (информационных структур)
на примере статической и динамической моделей дуополии Курно. Срав-
ниваются независимое поведение равноправных игроков, их кооперация
и отношения иерархии, формализуемые как игры Гермейера. Для коли-
чественной оценки эффективности с точки зрения отдельных игроков и
общества в целом используются индивидуальные и коллективные индек-
сы относительной эффективности. Исследуются условия экологической
безопасности системы. Предложена организационно-экономическая ин-
терпретация результатов.
Ключевые слова: дуополия Курно, игры Гермейера, индексы относитель-
ной эффективности, кооперативное решение, экологическая безопасность.
DOI: 10.31857/S0005231023020083, EDN: OOEOCX
1. Введение
К числу основных способов организации взаимодействия экономических
агентов можно отнести независимое поведение, кооперацию и отношения
иерархии. Коллективный исход рационального поведения независимых игро-
ков может оказаться хуже исхода, полученного при централизованном управ-
лении или добровольной кооперации. Для ответа на вопрос “насколько хуже”
вводится специальная функция выигрыша, которая позволяет количествен-
но измерить (не)эффективность равновесий. Обычно подобные меры опреде-
ляются как отношение между значениями функции выигрыша в некотором
равновесии и при коллективно оптимальном исходе. (Не)эффективность рав-
новесий активно изучается в таких областях, как построение игр на сетях,
игры составления расписаний и распределения ресурсов и т.д. [1-5].
Важно отметить, что указанные индексы отражают интересы общества
(экономики) в целом. С этой точки зрения кооперация всегда выгодна, и
индексы оценивают только потери от эгоистичного поведения (хотя иерар-
хическое управление может оказаться не менее выгодным, чем кооперация).
150
Однако выигрыш отдельного игрока в роли ведущего или при независимом
поведении может оказаться больше, чем его доля в распределении суммарно-
го выигрыша при кооперации. Поэтому представляется чрезвычайно важным
исследование условий выгодности кооперации с позиций не только обществен-
ного благосостояния, но и интересов отдельных экономических агентов.
Концепция жизнеспособности (viability) предложена Ж.П. Обеном [6] и
развита в [7, 8]. Идея здесь состоит в том, что вектор состояния управляемой
динамической системы должен принадлежать заданной области простран-
ства состояний, что отражает, например, требования экологического равно-
весия. Для статических моделей условия жизнеспособности учитываются как
дополнительные ограничения.
Удобной моделью для иллюстрации понятия (не)эффективности равнове-
сий и анализа условий жизнеспособности представляется дуополия Курно.
В этом случае под жизнеспособностью понимается экологическая безопас-
ность. В статической модели предполагается полная информация игроков,
благодаря которой они за один шаг приходят к равновесию Нэша [9]. Деталь-
ный анализ динамической олигополии Курно проведен в [10]. В [11] рассмат-
ривается ограниченная рациональность игроков и выводятся условия локаль-
ной устойчивости равновесий Нэша как результата процедуры нащупывания
по Курно в дискретной динамической модели.
Модели олигополии Курно изучаются в сериях работ [12-19]. В первой
серии М.И. Гераськин использует аппарат предположительных вариаций,
а также рефлексивных игр. Изучаются равновесия Нэша и Штакельберга,
приведены приложения к российскому рынку телекоммуникаций. Во второй
серии Г.И. Алгазин и соавт. также синтезируют подходы классической теории
игр, теории коллективного поведения и концепции рефлексивных игр приме-
нительно к моделям олигополии Курно. В названных работах используются
индексы относительной эффективности.
В настоящей статье рассматриваются модели дуополии Курно в непре-
рывном времени, непосредственно обобщающие базовую статическую модель.
Взаимодействие игроков учитывается через их переменные состояния (объ-
емы выпусков), управляющие переменные (переменные издержки) задаются
как кусочно-непрерывные программные стратегии. Для исследования этих
моделей используются стандартные методы [20, 21] и авторские численные
алгоритмы [22-24].
Конечно, дуополия Курно только частный пример. В целом речь идет
о системах взаимодействия активных (экономических и иных) агентов, опи-
сываемых моделью игры в нормальной форме [9]. В статической постановке
эта модель имеет вид
gi(u1,... ,un) → max, ui ∈ Ui, i ∈ N.
Здесь N = {1, . . . , n}
конечное множество активных агентов (игроков);
Ui
множество допустимых действий игрока i ∈ N; ui
конкретное
151
действие игрока i ∈ N; u = (u1, . . . , un) ∈ U = U1 × . . . × Un
исход игры;
u-i = (u1,... ,ui-1,ui+1,... ,un); gi : U → R
функция выигрыша игрока
i ∈ N. При независимом эгоистичном поведении равноправных игроков ре-
шением игры считается множество равновесий Нэша
{
(
)
(
)}
NE = uNE ∈ U : ∀i ∈ N ∀ui ∈ Ui gi
uNE
≥gi
ui,uNE-i
Под кооперацией в приведенной модели понимается совместная макси-
мизация всеми игроками суммарного выигрыша (утилитаристской функ-∑
ции общественного благосостояния) g(u) =i∈N gi(u). Другая интерпрета-
ция этого способа поведения введение централизованного управляющего
(social planner), который максимизирует g(u) по всем ui. Таким образом,
при переходе к кооперации теоретико-игровая модель становится задачей
оптимизации.
При наличии иерархии имеющий преимущество первого хода ведущий иг-
рок может сообщить ведомому (или нескольким ведомым) свое действие или
постоянную стратегию (игра Гермейера Г1), либо стратегию с обратной свя-
зью по управлению ведомого (игра Гермейера Г2) [25]. В англоязычной лите-
ратуре при исследовании олигополии Курно используются соответствующие
термины “игра Штакельберга” и “обратная игра Штакельберга”, а решение
игры Г1 называется равновесием Штакельберга. В динамической постановке
с точки зрения сравнительного анализа эффективности ничего принципиаль-
но не меняется.
Ограничения предлагаемого подхода состоят в следующем.
1. Пока рассматриваются только детерминированные модели. При нали-
чии внешней неопределенности ситуация усложняется, это предмет после-
дующего анализа.
2. Анализ оптимального соотношения централизации и децентрализации
(Ф.И. Ерешко) в связи с проблемой неопределенности также пока не прово-
дится.
3. Конечно, приведенные теоретико-игровые модели и информационные
структуры не исчерпывают возможного разнообразия способов организа-
ции активных агентов и методов управления ими. Например, иерархическое
управление может описываться не только играми Г1 и Г2, но и игрой Г3.
Можно рассматривать игры с агрегированной информацией (В.С. Алиев
и А.Ф. Кононенко), занимающие промежуточное положение между играми
Г1 и Г2. Иерархическое принятие решений допускает описание играми в раз-
вернутой форме и т.д. Однако все же принципиально различные способы
взаимодействия это равноправие, кооперация и иерархия, остальное ско-
рее детали.
Вклад настоящей статьи:
построены и исследованы оригинальные динамические модели дуополии
Курно для различных информационных структур;
152
предложена целостная система коллективных и индивидуальных ин-
дексов относительной эффективности способов организации экономических
агентов;
на основе предложенной системы индексов проведен сравнительный ана-
лиз эффективности способов организации агентов на примере моделей дуопо-
лии Курно с учетом условий экологической безопасности.
2. Статическая модель дуополии Курно
Рассмотрим модель дуополии Курно в следующем виде:
(1)
g1(u1,u2) = (1/2 - u1 - u2)u1 → max,
0≤u1
≤ 1/2;
(2)
g2(u1,u2) = (1/2 - u1 - u2)u2 → max,
0≤u2
≤ 1/2.
Здесь ui объем выпуска товара фирмой i; gi ее прибыль; для просто-
ты разность между ценой закрытия рынка и переменными затратами взята
равной 1/2, постоянные затраты равны нулю, а наклон линии спроса равен
единице; значения выпусков обеих фирм принадлежат отрезку [0, 1/2].
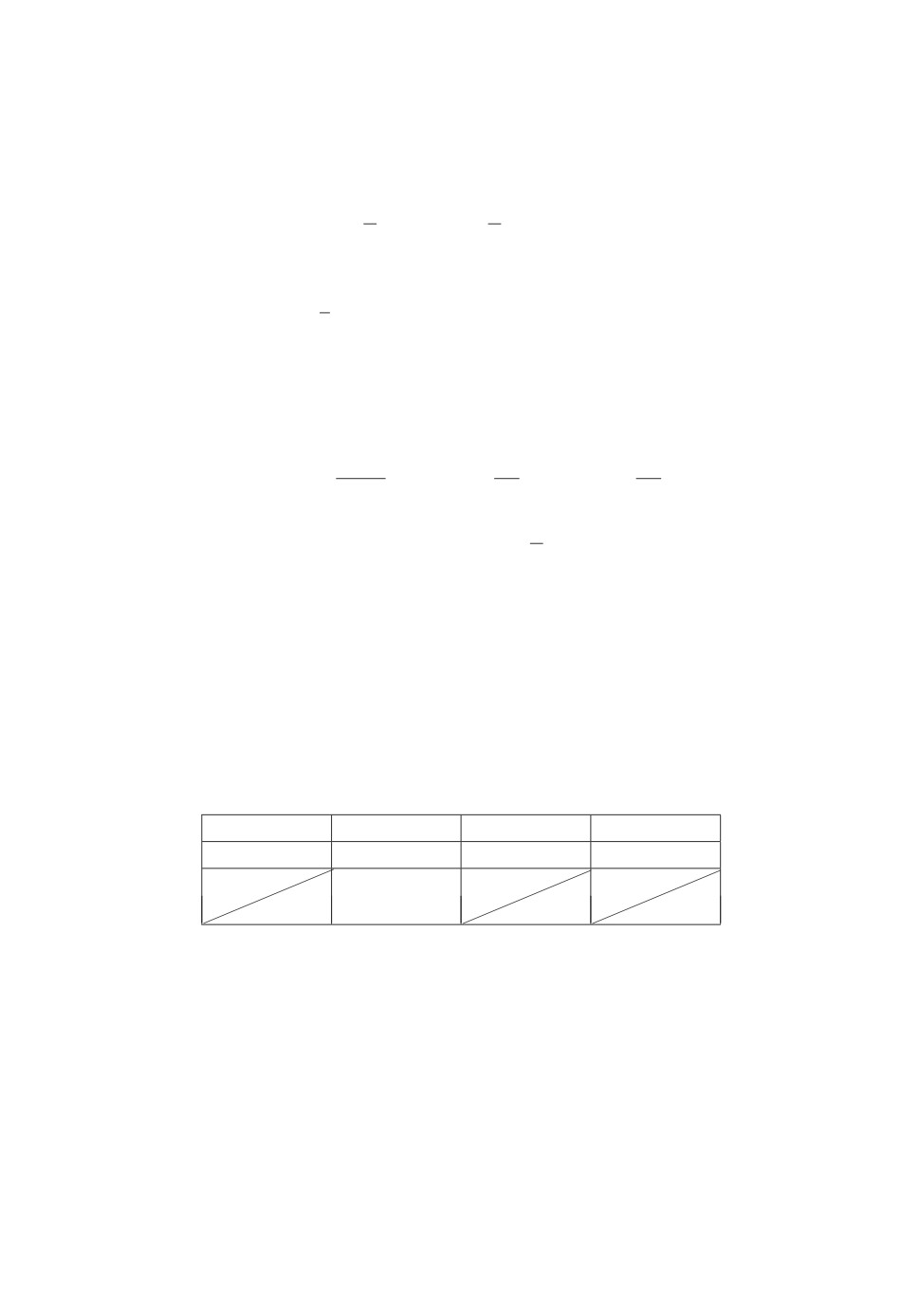
Таблица 1 устроена следующим образом. Столбцы соответствуют различ-
ным принципам оптимальности в модели (1)-(2): равновесию Нэша в игре
в нормальной форме равноправных независимых агентов (NE); равному де-
лежу при кооперативном поведении игроков (С); играм Гермейера Г1 (ST)
и Г2 (IST) при ведущем первом игроке. В первой строке приведены опти-
мальные согласно некоторому принципу исходы игры, во второй соответ-
ствующие выигрыши игроков, в третьей значения суммарного выигрыша
обоих игроков. Доказательства приведены в Приложении.
Таблица 1. Выигрыши игроков в дуополии Курно
NE
C
ST
IST
(u1, u2)
(1/6, 1/6)
(1/8, 1/8)
(1/4, 1/8)
(1/4, 0)
(g1, g2)
(1/36, 1/36)
(1/32, 1/32)
(1/32, 1/64)
(1/16, 0)
g=g1 +g2
1/18
1/16
3/64
1/16
Для сравнительного анализа эффективности способов организации введем
систему индивидуальных и коллективных индексов относительной эффек-
тивности в игре n лиц. Коллективные индексы относительной эффективности
соотносят значения общественного благосостояния при различных способах
организации с его максимальным значением, достигаемым при кооперации
игроков:
ST
gNEmin
g
SCINE =
;
SCIST =
;
gmax
gmax
(3)
∑
∑
gmax = gC = max
gi(x); gNEmin = min
gi(x).
x∈X
x∈NE
i∈N
i∈N
153
Для определения величин gST , gISTиспользуем следующие соображения.
Пусть STi множество решений игры Г1 (равновесий Штакельберга) при
ведущем i-м игроке [9]. Поскольку ведущим может быть любой игрок, то в
целом выигрыш общества при иерархическом управлении без обратной связи
можно вычислить как
∑
∑
1
1∑
gST =
gSTi =
gSTij.
n
n
i∈N
i∈N j∈N
Аналогично, пусть ISTi множество решений игры Г2 при ведущем i-м иг-
∑
∑
роке [25]. Тогда gIST =1
выигрыш общества при иерар-
n i∈N j∈N
gISTij
хическом управлении с обратной связью.
Индивидуальные индексы относительной эффективности соотносят выиг-
рыши игроков при различных способах организации с их симметричным вы-
игрышем при кооперации:
gNEi,min
γi
γi
KNEi =
;
KSTi =
;
KISTi =
;
gCi
gCi
gC
i
(4)
1
gNEi,min = min
gi(x);
gCi =
gC, i ∈ N.
x∈NE
n
Здесь γi
выигрыш i-го игрока как ведущего в игре Г1 ; γi выигрыш
i-го игрока как ведущего в игре Г2. Выигрыши всюду предполагаются неот-
рицательными. Значения индексов относительной эффективности в дуополии
Курно (1)-(2) приведены в табл. 2. В двух последних ячейках сверху показан
выигрыш игрока как ведущего (L), снизу как ведомого (F). При коопера-
ции значения индексов равны 1.
Таблица 2. Значения коллективных и индивидуальных
индексов эффективности в дуополии Курно
NE
ST
IST
SCI
8/9
3/4
1
KLi
8/9
1
2
KFi
1/2
0
Анализ данных табл. 2 приводит к двум разным системам предпочтений:
общество C ∼ IST ≻ NE ≻ ST ;
индивидISTL ≻ STL ∼ C ≻ NE ≻ STF ≻ ISTF .
В любой игре в нормальной форме имеет место соотношение gC = gmax =
∑
+ Δ, где Δ ≥ 0 эмерджентный (кооперативный, синергиче-
= i∈Ng
,min
ский) эффект, показывающий выгодность кооперации для общества в целом.
Таким образом, в системе предпочтений для общества кооперация всегда при-
водит к наилучшему исходу (в дуополии Курно такой же максимальный вы-
игрыш достигается и в игре Г2). Поэтому коллективные индексы относитель-
154
ной эффективности можно назвать индексами системной согласованности.
Чем ближе значение индекса к единице, тем выше степень согласованности
системы.
А вот для индивидуальных предпочтений возможно как Ki ≥ 1, так и
Ki ≤ 1. Если Δ велико, то обычно gCi > γi, и тогда кооперация выгоднее
иерархии для всех игроков. Однако в большинстве приложений (например,
в рассматриваемой дуополии Курно) Δ не слишком велико, и тогда gCi < γi,
поэтому возникает борьба за лидерство. Заметим, что ведомый игрок при
иерархии находится в намного менее выгодном положении.
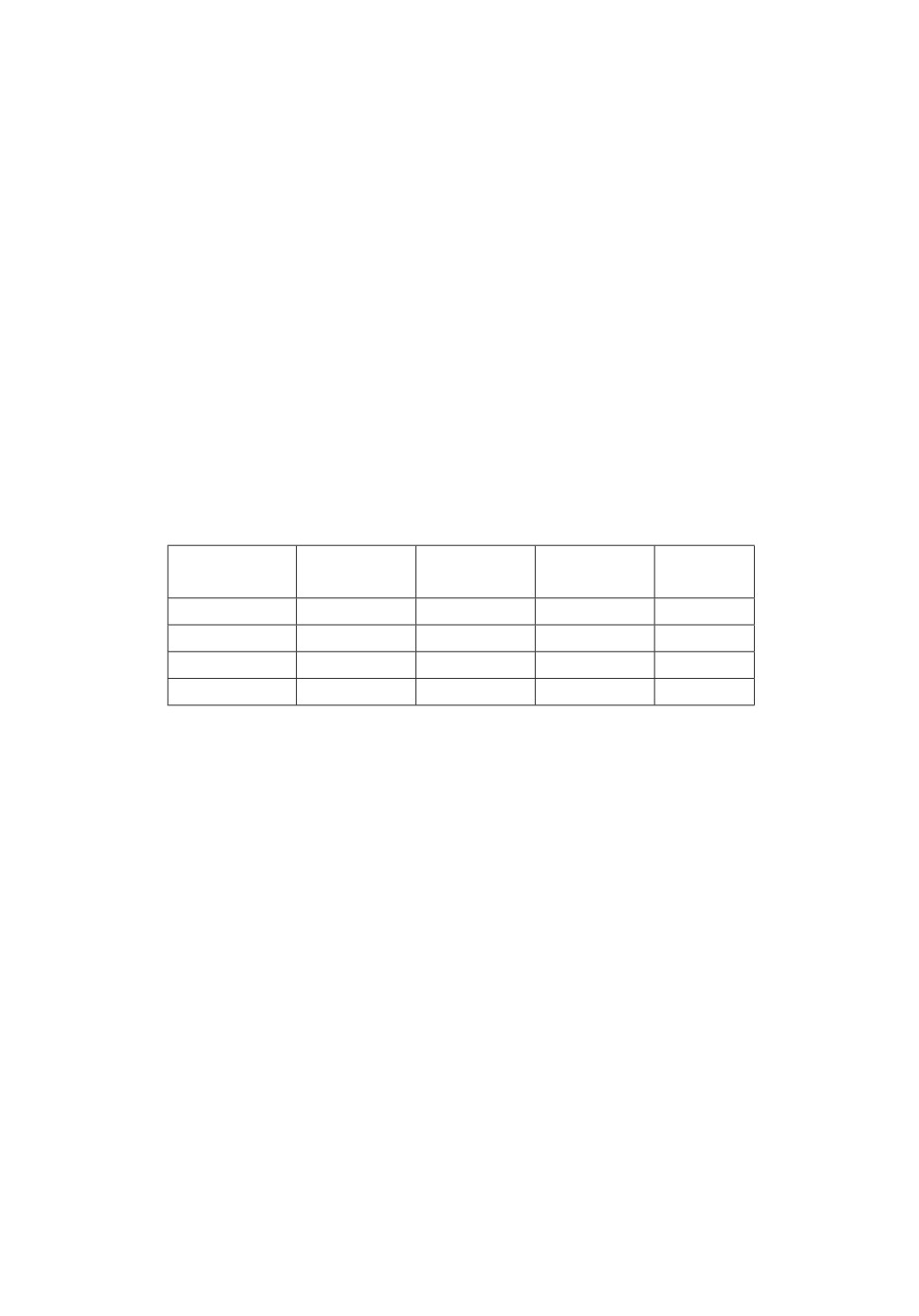
Проведем теперь анализ условий экологической безопасности. Пусть ве-
личина загрязнения при производстве продукта пропорциональна суммар-
ному выпуску: P = α(u1 + u2), тогда экологическое условие можно задать с
помощью ограничения u1 + u2 ≤ κ, где κ = P∗/α, P∗ предельно допусти-
мая величина загрязнения. Если игра иерархическая, то за выполнение этого
требования отвечает ведущий игрок, иначе это внешнее ограничение, которое
проверяется дополнительно. Результаты анализа собраны в табл. 3.
Таблица 3. Анализ условия экологической безопасности
Значение
NE
C
ST
IST
параметра κ
[0, 1/4)
-
-
-
-
[1/4, 1/3)
-
{(1/8, 1/8)}
-
{(1/4, 0)}
[1/3, 3/8)
{(1/6, 1/6)}
{(1/8, 1/8)}
-
{(1/4, 0)}
[3/8, ∞)
{(1/6, 1/6)}
{(1/8, 1/8)}
{(1/4, 1/8)}
{(1/4, 0)}
Прочерк означает, что соответствующее решение игры не существует при
данном диапазоне значений параметра κ (т.е. несовместимо с экологически-
ми условиями). В частности, при κ ≥ 3/8 все рассмотренные принципы опти-
мальности дают экологически безопасные решения, а при κ < 1/4 наоборот.
Самым чувствительным к экологическому ограничению оказывается равно-
весие Штакельберга, а самым устойчивым кооперативное решение.
3. Дифференциальная модель дуополии Курно
с линейным уравнением динамики
Рассмотрим динамическое обобщение модели (1)-(2) с линейной динами-
кой:
∫T
{
}
Ji
= e-ρt β [D - x1(t) - x2(t)]xi(t) - vi(t) dt + e-ρTxi(T) → max;
(5)
0
0 ≤ vi(t) ≤ vmax;
(6)
xi = aivi(t) - mixi(t), xi(0) = xi0
,
i = 1,2.
155
Здесь Ji
прибыль i-го игрока (фирмы) за время T ; vi(t)
управляю-
щие переменные игроков (переменные издержки) в допустимом диапазоне;
vmax максимально допустимые переменные издержки; xi(t) их перемен-
ные состояния (объемы выпуска); выражение в квадратных скобках опре-
деляет цену на производимый товар в зависимости от спроса, обратно про-
порционального суммарному объему выпуска товара; ai коэффициенты
производительности; mi коэффициенты уменьшения выпуска; β неко-
торый размерный коэффициент, обеспечивающий совпадение размерностей;
ρ коэффициент дисконтирования; T длина игры; D параметр спроса.
Предполагается, выполнение естественного условия xi(t) = 0, если vi(t) = 0.
Итак, взаимодействие игроков (конкурирующих фирм) описывается через их
переменные состояния.
Исследуем модель (5)-(6) с помощью принципа максимума Понтрягина
[20, 21], считая, что игроки используют программные стратегии и их управ-
ления кусочно-непрерывны. Отметим, что согласно [28] равновесие Нэша су-
ществует.
Функция Гамильтона имеет вид
Hi(xi,vi,λi) = (D - x1 - x2)xi - vi + λi(aivi - mixi); i = 1,... n,
где λi(t) сопряженная переменная. Тогда получим
1
≥ 0, λi(t) ≥
,
∂Hi
ai
= -1 + aiλi
∂ui
1
< 0, λi(t) <
,
ai
∂λi
= -D + 2xi + xj + (ρ + mi)λi; λi(T) = 1; i = 1,2; j = i
∂t
откуда с учетом структуры модели равновесные по Нэшу стратегии имеют
вид
1
vmax, λi(t) ≥
,
ai
vNEi(t) =
1
0,
λi(t) <
, i = 1,2.
ai
Здесь сопряженные переменные имеют вид
T
∫
(
)
λi
(t) =1 -D e-T(ρ+mi) - e-t(ρ+mi)
-2
Ai(τ)e-2τ(ρ+mi)dτ -
ρ+mi
t
∫T
- Aj(τ)e-τ(2ρ+mi+mj)dτet(ρ+mi); j = i; i,j = 1,2;
t
156
t
∫
Ai(t) = x0i + ai
emiτ vNEi(τ)dτ;
0
t
∫
xNEi(t) = Ai(t)e-mit = x0ie-mit + ai emi(τ-t)vNEi(τ)dτ,
0
выигрыши игроков в равновесии равны
∫T
}
{[
]
Ji = e-ρt
D - x1(t) - x2(t)
xi(t) - vi(t) dt + e-ρT xi(T).
0
Таким образом, равновесие Нэша существует и единственно. Отметим, что
функции λi(t) и управления vNEi (t) взаимосвязаны. Поэтому исследование
модели (5)-(6) было проведено численно c целью определения числа точек
переключения управления с одного значения на другое и вычисления выиг-
рышей агентов. Расчет проводился методом стрельбы. Было проведено по-
рядка 150 численных экспериментов в случае двух агентов. При этом варьи-
ровались величины: D от 0,5 до 40; m1, m2 от 0,1 до 40; a1, a2 от 1 до 100;
x10, x20 от 1 до 50; vmax от 50 до 1000. Ниже показаны результаты экспери-
ментов в случае T = 365 сут; ρ = 0,001. Таблица входных данных приведена
в Приложении. В табл. 4 показаны результаты расчетов по ним. Значения t1
и t2 показывают, в какие моменты времени происходит изменение управлений
агентов.
Проведенные численные эксперименты для широкого класса входных
функций показали, что управления за моделируемый промежуток времени
меняются не более одного раза, причем примерно для половины входных
данных управления оставались неизменными. В то же время при малых зна-
чениях коэффициента параметра спроса D (меньших 13 в проведенных экспе-
риментах) всегда происходило одно изменение управлений за моделируемый
промежуток времени. В разных примерах переключение управлений проис-
ходило с минимального значения на максимальное или наоборот. При этом
момент времени, в который происходит изменение управлений, меняется и
зависит от входных параметров модели.
Заметим, что для определенного класса входных данных управления аген-
та в равновесии Нэша не меняется с течением времени и остается равным
максимально возможному значению. В этом случае, если xi0 = aivmax/mi, то
дифференциальное уравнение имеет особую точку, которая является аттрак-
тором.
Для подтверждения сделанных на основе численного счета выводов было
проведено аналитическое исследование модели в предположении, что управ-
ления меняются не более одного раза и переключаются или с нулевого значе-
ния на максимально возможное, или наоборот. Рассматривался случай двух
157
агентов, если их управления
{vmax, если t ≤ ti,
vNEi(t) =
0,
если ti ≤ t, i = 1, 2
(7)
{0,
если t ≤ ti,
или vNEi (t) =
vmax, если ti ≤ t, i = 1,2.
Было рассмотрено четыре возможных варианта сочетаний управлений
двух агентов. Ниже приведены выкладки в случае, когда оба агента меняют
свои управления один раз в разные моменты времени с максимально возмож-
ного значения на нулевое, т.е.
{vmax, если t ≤ ti,
(8)
vNEi(t) =
0,
если ti ≤ t, i = 1, 2.
Тогда
(
)
xi0 - aivmax/mi
e-mit + aivmax/mi,
если 0≤t≤ti,
xNEi(t) =
(
)
aivmax/mi + (xi0 - aivmax/mi)e-miti
e-mi(t-ti),
если ti ≤ t ≤ T, i = 1, 2.
Обозначим
Ai = xi0 - aivmax/mi;
Bi = aivmax/mi;
Ci = aivmax/mi + (xi0 - aivmax/mi)e-miti
Функции λNEi (t) находятся аналитически и в предположении t1 ≤ t2
имеют
вид
λi(t) = Ei(t)e-(ρ+mi)(T-t),
где
Ei0, если 0≤t<t1,
Ei(t) =
Ei1, если t1 ≤ t < t2,
Ei2, если t2 ≤ t ≤ T.
Здесь (i = 1, 2; j = 1, если i = 2; j = 2, если i = 1)
(
)
-D + 2Bi + Bj
Ei0
=1+
1-e(ρ+mi)(T-t)
+
ρ+mi
(
)
2Ai
+
e(ρ+mi)T e-(ρ+2mi)T - e-(ρ+2mi)t
+
ρ + 2mi
(
)
Aj
+
e(ρ+mi)T e-(ρ+m1+m2)T - e-(ρ+m1+m2)t
;
ρ+m1 +m2
158
)
-D + B2 (
E11 = 1 +
1-e(ρ+m1)(T-t)
+
ρ+m1
(
)
2C
1
+
e(ρ+m1)T+m1t1 e-(ρ+2m1)T - e-(ρ+2m1)t
+
ρ + 2m1
(
)
A2
+
e(ρ+m1)T e-(ρ+m1+m2)T - e-(ρ+m1+m2)t
;
ρ+m1 +m2
(
)
-D + B2
E21
=1+
1-e(ρ+m2)(T-t)
+
ρ+m2
(
)
2C
1
+
e(ρ+m2)T+m1t1 e-(ρ+m1+m2)T - e-(ρ+m1+m2)t
+
ρ+m1 +m2
(
)
A2
+
e(ρ+m2)T e-(ρ+2m2)T - e-(ρ+2m2)t
;
ρ + 2m2
(
)
-D
Ei2
=1+
1-e(ρ+mi)(T-t)
+
ρ+mi
(
)
2C
+
i e(ρ+mi)T+miti e-(ρ+2mi)T - e-(ρ+2mi)t
+
ρ + 2mi
(
)
C
j
+
e(ρ+mi)T+mj tj e-(ρ+m1+m2)T - e-(ρ+m1+m2)t
ρ+m1 +m2
Затем проверяется предположение (8), т.е. выполнение неравенств (i
=
= 1, 2)
(9)
λi ≥ 1/ai, если 0 ≤ t < ti; λi < 1/ai, если ti
≤t≤T.
Если неравенства (9) выполняются, то управления агентов имеют вид (8).
Аналогично проверяется, имеют ли управления агентов вид, соответст-
вующий какому-либо другому сочетанию управлений (7). Проведенные таким
образом расчеты подтвердили результаты, приведенные в табл. 4.
При кооперации игроков игра становится задачей оптимального управ-
ления, решение которой аналогично решению модели (5)-(6) с очевидными
изменениями.
Теоретико-игровые постановки Г1t и Г2t исследовались численно. Алгорит-
мы нахождения решений описаны в [22, 23]. Равновесия при постановках Г1t
и Г2t находились в соответствии с алгоритмами [22, 23] методом качественно
репрезентативных сценариев имитационного моделирования [24]. При этом в
качестве начальных множеств качественно репрезентативных сценариев иг-
роков берутся множества, состоящие из трех элементов: минимально и макси-
мально допустимых управлений в соответствии с (5) и их среднего арифмети-
ческого. Все элементы начального множества качественно репрезентативных
сценариев проверяются на полноту и избыточность, при необходимости оно
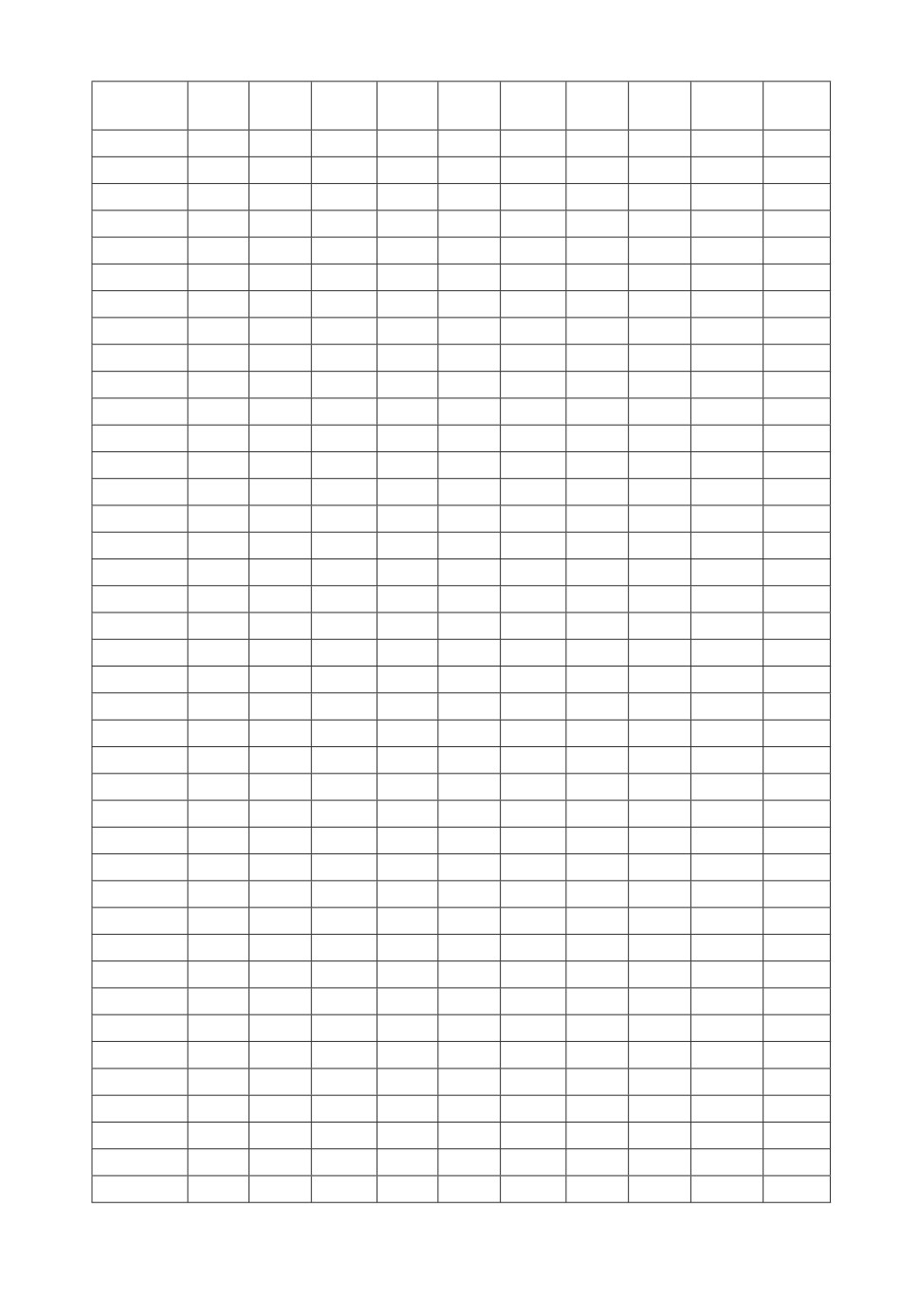
сужается или пополняется новыми элементами. Результаты численного сче-
та для случаев кооперации и иерархии помещены в табл. 5. В динамической
159
Таблица
4. Результаты численного исследования
№
t1
t2
v1(0)
v1(T)
v2(0)
v2(T) J1
J2
x1(T)
x2(T)
примера
(сут)
(сут)
1
0
-
0
100
75
0
13,4
16,1
2,5
3,2
2
100
30
0
100
30
0
4,7
4,5
1,1
0,1
3
100
30
0
100
30
0
21,3
7,9
1,1
0,1
4
0
-
0
0
-
0
24,2
7,5
1,1
0,1
5
0
-
0
0
-
0
30,2
6,8
3,7
0,5
6
0
-
0
0
-
0
30,7
6,8
3,7
0,5
7
0
-
0
0
-
0
30,7
6,8
3,7
0,5
8
0
-
0
0
-
0
6,7
1,7
0,001
2E-8
9
0
-
0
0
-
0
188,6
85,9
3,7
0,5
10
0
-
0
100
10
0
4,3
5,3
0,02
0,1
11
0
-
0
0
-
0
125
54
3,7
0,5
12
0
-
0
0
-
0
125
54
3,7
0,5
13
0
-
0
0
-
0
17
71
0,0004
0,5
14
0
-
0
0
-
0
146
5
3,7
0
15
0
-
0
0
-
0
125
54
3,7
0,5
16
0
-
0
0
-
0
125
54
3,7
0,5
17
0
-
0
0
-
0
117
5,3
11
0,5
18
0
-
0
0
-
0
76
63
3,7
1,5
19
100
-
100
0
5
100
5,3
76
0
0,5
20
0
10
100
0
-
0
78
48
10
0,5
21
0
10
100
0
30
100
146
5
3,7
0
22
100
10
0
100
30
0
33,8
104,4
0,0006
0,5
23
100
20
0
100
50
0
237
8
4,3
9Е-11
24
0
-
0
0
-
0
291
61
7,4
0,5
25
0
-
0
0
-
0
62
23
3,7
0,5
26
0
20
100
0
100
100
7,3
39,5
0,0004
0,5
27
0
10
100
0
40
100
83,6
1,8
3,7
0
28
0
40
300
0
100
300
62
23
3,7
0,5
29
0
30
100
0
70
100
12,5
2,5
0,0004
0
30
0
10
100
0
40
100
83,6
1,8
3,7
0
31
0
20
100
0
70
100
12,5
2,5
0,0004
0
32
0
30
300
0
60
300
7,3
39,5
0,0004
0,5
33
0
50
100
100
-
100
2,4
0,5
0,0001
0
34
100
-
100
0
25
100
14,7
4,3
1,1
0,1
35
0
-
0
0
-
0
71
17
1,1
1Е-12
36
0
-
0
0
-
0
70
20
0,001
0,1
37
0
10
100
100
-
100
2,3
0,5
0,0001
0
38
0
-
0
0
-
0
73
1
0,001
1Е-12
39
0
15
100
100
-
100
16
0,4
1,1
0
40
0
-
0
0
-
0
28,8
141,7
0,001
1
160
Таблица 5. Выигрыши игроков при разных информационных регламентах
№
NE
C
ST
IST
примера
J1
J2
J
J1
J2
J1
J2
1
13,4
16,1
30,8
16,7
13,3
18,2
11,6
2
4,7
4,5
9,4
5,1
4,2
5,1
4,2
3
21,3
7,9
30,4
22,5
7,5
25
4,6
4
24,2
7,5
32,4
26
6
26
6
5
30,2
6,8
38
33,2
4,3
36,3
1
6
30,7
6,8
38,4
35,3
2,7
37,2
0,7
7
30,7
6,8
38,4
35,3
2,7
37,2
0,7
8
6,7
1,7
9,3
7,2
1,5
8,1
1
9
188,6
85,9
286,6
199,3
76,8
199,3
76,8
10
4,3
5,3
10,7
5,7
4
5,7
4
11
125
54
197,5
139
48
145
39
12
125
54
197,5
139
48
145
39
13
17
71
90,8
46
43
49
40
14
146
5
157,8
152
3,4
152
3,4
15
125
54
187,5
137
46
142
38
16
125
54
187,5
137
46
142
38
17
117
5,3
125,3
120,2
4,7
124,3
0,5
18
76
63
145,3
88
53
97
43
19
5,3
76
86
45
38
46
37
20
78
48
138
92
40
95
34
21
146
5
152,8
148
3,3
149,6
1,5
22
33,8
104,4
143,8
44
97
48,3
92,4
23
237
8
256,7
245
5
247,3
2,2
24
291
61
364,6
302,1
57,3
311,2
47,5
25
62
23
88,5
71
16
74,5
11,6
26
7,3
39,5
51,4
26
23
27,4
20
27
83,6
1,8
91,2
88
2,7
89,1
1,4
28
62
23
88,5
69
17
71,2
14,2
29
12,5
2,5
17
14
2
14
2
30
83,6
1,8
89,4
88
0,2
88
0,2
31
12,5
2,5
17
15
1,3
15,4
0,7
32
7,3
39,5
48,4
29
18,6
30,5
16,9
33
2,4
0,5
3,9
2,9
0,2
2,9
0,2
34
14,7
4,3
19,2
17,5
1,6
18,3
0,8
35
71
17
92,6
78
12,7
81,8
9,4
36
70
20
94,6
74,5
18,4
76,2
17,7
37
2,3
0,5
3,9
3,0
0,2
3,1
0,2
38
73
1
76,7
75,1
0,6
75,1
0,6
39
16
0,4
21,2
19,4
0,3
20,3
0,2
40
28,8
141,7
172,3
33,5
136,5
37,3
134,5
161
Таблица 6. Индексы эффективности игроков при разных информационных
регламентах
NE
ST
IST
№
примера
SCI
K1/K2
SCI
K1L/K2F
SCI
K1L/K2F
1
0,96
0,87 /1,05
0,97
1,08/0,86
0,96
1,18/0,75
2
0,98
1 /0,95
0,99
1,09/0,89
0,98
1,09/0,89
3
0,96
1,4 /0,51
0,99
1,48/0,33
0,97
1,64/0,3
4
0,98
1,48 /0,46
0,99
1,6/0,37
0,98
1,6/0,37
5
0,97
1,58/0,36
0,98
1,75/0,23
0,98
1,91/0,05
6
0,98
1,59/0,35
0,99
1,83/0,14
0,98
1,94/0,04
7
0,98
1,59/0,35
0,99
1,83/0,14
0,98
1,94/0,04
8
0,9
1,46/0,37
0,94
1,54/0,32
0,93
1,74/0,22
9
0,96
1,32/0,6
0,96
1,39/0,54
0,96
1,39/0,54
10
0,9
0,8/1
0,91
1,08/0,75
0,91
1,08/0,75
11
0,91
1,26/0,55
0,95
1,41/0,49
0,93
1,46/0,33
12
0,91
1,26/0,55
0,95
1,41/0,49
0,94
1,46/0,33
13
0,97
0,38/1,58
0,98
1,01/0,95
0,97
1,08/0,88
14
0,96
1,87/0,06
0,98
1,93/0,04
0,97
1,93/0,04
15
0,95
1,33/0,57
0,97
1,46/0,49
0,96
1,51/0,4
16
0,95
1,33/0,57
0,97
1,46/0,49
0,96
1,51/0,4
17
0,98
1,86/0,08
0,99
1,92/0,08
0,98
1,99/0,01
18
0,96
1,04/0,86
0,97
1,21/0,73
0,96
1,34/0,59
19
0,95
0,12/1,77
0,98
1,05/0,88
0,97
1,07/0,86
20
0,91
1,13/0,7
0,95
1,33/0,58
0,94
1,38/0,49
21
0,99
1,92/0,07
0,99
1,95/0,04
0,99
1,97/0,02
22
0,96
0,47/1,45
0,98
0,61/1,35
0,98
0,67/1,28
23
0,95
1,85/0,06
0,97
1,91/0,04
0,97
1,93/0,02
24
0,96
1,6/0,33
0,99
1,65/0,31
0,98
1,7/0,26
25
0,96
1,40/0,52
0,98
1,61/0,36
0,98
1,69/0,26
26
0,91
0,28/1,54
0,93
1,01/0,89
0,92
1,07/0,78
27
0,94
1,83/0,04
0,97
1,93/0,06
0,96
1,95/0,03
28
0,96
1,4/0,52
0,98
1,56/0,38
0,97
1,61/0,32
29
0,88
1,47/0,29
0,94
1,65/0,24
0,94
1,65/0,24
30
0,96
1,86/0,04
0,98
1,97/0,01
0,98
1,97/0,01
31
0,88
1,47/0,29
0,92
1,76/0,15
0,9
1,81/0,08
32
0,97
0,3/1,63
0,99
1,2/0,77
0,98
1,26/0,7
33
0,74
1,23/0,26
0,79
1,49/0,1
0,77
1,49/0,1
34
0,99
1,53/0,45
0,99
1,82/0,17
0,99
1,91/0,08
35
0,95
1,53/0,37
0,98
1,68/0,27
0,98
1,77/0,2
36
0,95
1,48/0,42
0,98
1,58/0,39
0,99
1,61/0,37
37
0,72
1,18/0,26
0,82
1,54/0,1
0,85
1,59/0,1
38
0,96
1,9/0,03
0,99
1,96/0,02
0,99
1,96/0,02
39
0,77
1,51/0,04
0,93
1,83/0,03
0,97
1,92/0,02
40
0,99
0,33/1,65
0,99
0,39/1,59
0,99
0,43/1,77
Среднее значение
0,935
1,28/0,59
0,962
1,5/0,42
0,957
1,56/0,37
162
версии игры индивидуальные и коллективные индексы относительной эф-
фективности определяются выражениями, аналогичными (3)-(4). Значения
индексов для модели (5)-(6) при различных способах организации собраны в
табл. 6. В последней строке табл. 6 приведены средние значения индексов.
Отсюда получаем системы предпочтений:
общество C ≻ ST ≻ IST ≻ NE;
индивидISTL ≻ STL ≻ NE1 ≻ C ≻ NE2 ≻ STF ≻ ISTF .
Таким образом, кооперативный способ организации более предпочтителен
для общества и ведомого игрока. Для ведущего же игрока предпочтительнее
иерархическая организация системы управления и информационный регла-
мент игры Г2t [26].
Теперь проанализируем влияние экологических требований на найден-
ные решения. Условие экологической безопасности возьмем в виде x1(T ) +
+x2(T) ≤ κT . При иерархическом управлении за его выполнение отвечает
ведущий игрок, в остальных случаях это внешнее ограничение, которое ана-
лизируется дополнительно. Результаты анализа чувствительности решений к
указанному условию приведены в табл. 7.
В столбцах 2-5 табл. 7 для разных информационных регламентов ука-
зано в процентах количество проведенных имитационных экспериментов, в
которых условие экологической безопасности выполнено. В первом столбце
табл. 7 приведены значения параметра κT . Таким образом, при больших зна-
чениях κT все рассмотренные принципы оптимальности дают экологически
безопасные решения. С уменьшением значения κT число равновесий, отве-
чающих экологическому условию, при всех принципах оптимальности умень-
Таблица 7. Анализ выполнения условия экологической безопасности
κT
NE (%)
C (%)
ST (%)
IST (%)
12
100
100
100
100
11
97,5
100
97,5
97,5
10
95
100
97,5
95
9
95
100
95
95
8
95
100
95
92,5
7
92,5
100
92,5
92,5
6
92,5
100
92,5
90
5
87,5
100
90
87,5
4
60
100
60
60
3
50
100
60
57,5
2
50
97,5
50
50
1
30
95
30
27,5
0,5
30
95
25
22,5
0,1
15
62,5
15
12,5
163
шается. С точки зрения экологической безопасности принципы оптимально-
сти упорядочены следующим образом: C ≻ NE ∼ T ∼ IST .
4. Заключение
Проблема (не)эффективности равновесий общепризнанна и служит пред-
метом внимания большого числа работ. Для количественной оценки
(не)эффективности предложен ряд индексов, отражающих пессимистический
подход (цена анархии), оптимистический подход (цена стабильности), дина-
мические аспекты (цена информации), альтруистическое поведение индивида
(цена кооперации).
Однако указанные индексы анализируют эффективность равновесий с
точки зрения всего общества. В этом случае кооперация является очевид-
ным наилучшим исходом и индексы оценивают только степень отклонения
системы от глобального оптимума. Между тем реальная возможность коопе-
рации зависит от интересов не только общества в целом, но и отдельных эко-
номических агентов (предпринимателей, фирм и т.п.). Например, выигрыш
игрока в роли ведущего при иерархической организации может оказаться
большим, чем его доля при кооперативном распределении, и тогда вместо
кооперации возникает борьба за лидерство. Поэтому для систематического
анализа (не)эффективности равновесий и условий выгодности кооперации
требуются не только коллективные, но и индивидуальные индексы относи-
тельной эффективности.
Кроме того, необходимо дополнительно учитывать условия жизнеспособ-
ности, определяющие требования к состоянию управляемой динамической
системы. В частности, эти условия могут задавать экологические ограни-
чения экономической деятельности, необходимые для устойчивого развития
эколого-экономических систем.
В данной статье система индивидуальных и коллективных индексов от-
носительной эффективности применена к исследованию статических и дина-
мических моделей дуополии Курно. В динамике для определения индексов
применялось усреднение по множеству вычислительных экспериментов. Как
и предполагалось, системы предпочтений для индивида (фирмы) и общества
в целом противоречивы. Кооперация игроков выгодна для общества в целом,
подчиненного (ведомого) игрока и с точки зрения выполнения условия эко-
логической безопасности. Для лидера (ведущего игрока) предпочтительнее
иерархия с информационным регламентом игры Гермейера Г2. Более того,
у двух несимметричных игроков различно отношение к кооперации: для од-
ного из них она выгоднее независимого поведения, для другого наоборот.
В дальнейшем планируется исследование моделей дуополии и олигопо-
лии Курно с учетом условия экологической безопасности для иных классов
функций, в частности степенных, а также рассмотрение теоретико-игровых
моделей олигополии Курно в форме характеристической функции. Будут рас-
смотрены и другие статические и динамические теоретико-игровые модели в
164
нормальной форме и форме характеристической функции с целью сравни-
тельного анализа эффективности способов взаимодействия активных аген-
тов [27].
ПРИЛОЖЕНИЕ
Поясним данные из табл. 1. Для нахождения равновесия Нэша в мо-
∂gi
{1/2 - 2u1 - u2 = 0
дели (1)-(2) решим систему
= 0, i = 1, 2, откуда
∂ui
1/2 - u1 - 2u2 = 0,
u1 = u2 = 1/6.
-2 - 1
Матрица Гессе для этой системы
трицательно определе-
о
-1 - 2
на, поэтому uNE1 = uNE2 = 1/6, gNE1 = gNE2 = 1/36. При кооперации игроки
совместно максимизируют функцию g(u) = (1/2 - u)u, u = u1 + u2. Имеем
∂g
= 1/2 - 2u = 0, u = 1/4,∂2g
= -2 < 0. Поэтому множество Парето-опти-
∂u
∂u2
мальных кооперативных решений есть uC = 1/4, откуда выбираем равный
дележ uC1 = uC2 = 1/8 и получаем выигрыши gC1 = gC2 = 1/32. Если первый
игрок лидер по Штакельбергу, то из условия∂g2 = 0 оптимальная функция∂u
2
реакции второго игрока есть u2(u1) = 1/4 - u1/2. Подставляя ее в g1, получа-
ем g1(u1, u2(u1)) = (1/4 - u1/2)u1. Условие∂u1∂1 =0даетu1=1/4.Поскольку
∂2g1
∂u21
= -1 < 0, то uST11 = 1/4, u2T1 = u2(u1T1) = 1/8, g1T1 = 1/32, g2T1 = 1/64.
Наконец, найдем решение игры (1)-(2) как Г2 [25]. Имеем
uD1(u2) = Arg maxg1(u1,u2) = 1/4 - u2/2,
0≤u1≤1/2
uP1 (u2) = Arg min g2(u1,u2) ≡ 1/2,
0≤u1≤1/2
(
)
L2 = max
uP1 (u2),u2
= max
(-u22) = 0,
0≤u2≤1/2
0≤u2≤1/2
{
(
)
}
E2 =
u2 ∈ U2 : g2
uP1 (u2),u2
=L2
= {0},
D2 = {(u1,u2) : g2(u1,u2) > 0},
K2 = min
max
g1(u1,u2) = max
(1 - u1)u1 = 1/16.
u2∈E2
0≤u1≤1/2
0≤u1≤1/2
Для нахождения величины K1 = sup g1(u1, u2) надо решить задачу оптими-
D2
зации (1/2 - u1 - u2)u1 → max, (1/2 - u1 - u2)u2 > 0, 0 ≤ ui ≤ 1/2. Очевидно
uε2 = ε, uε1 = 1/4. Тогда K1 = 1/16 - ε/4 < K2, поэтому ε-оптимальная стра-
{1/4, u2 = 0
тегия ведущего имеет вид ũε1(u2) =
при этом gIST11 = 1/16,
1/2 иначе
gIST12 = 0.
Заметим, что uNE = 1/3, uC = 1/4, uST = 3/8, uIST = 1/4, откуда следуют
данные табл. 3.
165
Таблица. Входные данные для численного решения динамической
дуополии Курно
№
D
m1
m2
a1
a2
x10
x20
vmax
примера
1
10
0,2
0,001
1
5
3
2
100
2
10
1
3
1
5
3
2
100
3
15
1
3
1
5
3
2
100
4
15
1
3
3
7
3
2
100
5
15
1
3
3
7
10
10
100
6
15
1
3
3
7
10
10
500
7
15
1
3
10
15
10
10
100
8
15
10
20
3
7
10
10
100
9
40
1
3
3
7
10
10
100
10
10
5
3
3
5
3
2
100
11
30
1
3
3
7
10
10
100
12
30
1
3
3
7
10
10
300
13
30
10
3
3
7
10
10
100
14
30
1
30
3
7
10
10
100
15
30
1
3
30
7
10
10
100
16
30
1
3
3
70
10
10
100
17
30
1
3
3
7
30
10
100
18
30
1
3
3
7
10
30
100
19
30
30
3
30
7
10
10
100
20
30
30
3
3
70
10
10
100
21
30
1
30
30
7
10
10
100
22
40
10
3
3
7
10
10
100
23
40
1
30
3
7
10
10
100
24
40
1
3
30
7
20
10
100
25
20
1
3
3
7
10
10
100
26
20
10
3
3
7
10
10
100
27
20
1
30
3
7
10
10
100
28
20
1
3
3
7
10
10
300
29
20
10
30
3
7
10
10
100
30
20
1
30
3
70
10
10
100
31
20
10
30
30
7
10
10
100
32
20
10
3
30
7
10
10
300
33
10
10
30
1
5
3
2
100
34
10
1
3
10
50
3
2
100
35
40
1
30
1
5
3
20
100
36
40
10
3
1
5
30
2
100
37
10
10
30
10
5
3
2
100
38
40
10
30
1
50
30
2
100
39
10
1
30
10
50
3
2
100
40
40
10
3
10
5
30
20
100
166
СПИСОК ЛИТЕРАТУРЫ
1.
Algorithmic Game Theory / Ed. by Nisan N., Roughgarden T., Tardos E., Vazi-
rani V. Cambridge University Press, 2007.
2.
Johari R., Tsitsiklis J.N. Efficiency loss in a network resource allocation game //
Math. Oper. Res. 2004. No. 29(3). P. 407-435.
3.
Papadimitriou C.H. Algorithms, games, and the Internet // Proc. 33rd Symp. The-
ory of Computing. 2001. P. 749-753.
4.
Roughgarden T. Selfish Routing and the Price of Anarchy. MIT Press, 2005.
5.
Basar T., Zhu Q. Prices of Anarchy, Information, and Cooperation in Differential
Games // J. Dynam. Games and Appl. 2011. No. 1. P. 50-73.
6.
Aubin J.-P. Viability Theory. Springer-Verlag, 1991.
7.
Cairns R.D., Martinet V. An environmental-economic measure of sustainable devel-
opment // Eur. Econom. Rev. 2014. No. 69. P. 4-17.
8.
Doyen L., Martinet V. Maximin, viability and sustainability // J. Econ. Dynam.
Control. 2012 V. 36(9). P. 1414-1430.
9.
Мулен Э. Теория игр с примерами из математической экономики. М.: Мир, 1985.
10.
Maskin E., Tirole J. A Theory of Dynamic Oligopoly, III. Cournot Competition //
Eur. Econ. Rev. 1987. No. 31. P. 947-968.
11.
Bischi G.I., Naimzada A. Global Analysis of a Dynamic Duopoly Game with
Bounded Rationality // Advances in Dynamic Games and Applications. Ed. by
J. Filar et al. - Birkhauser. 2000. P. 361-385.
12.
Гераськин М.И. Моделирование рефлексии в нелинейной модели трехагентной
олигополии Штакельберга для телекоммуникационного рынка России // АиТ.
2018. № 5. С. 83-106.
Geras’kin M.I. Modeling Reflexion in the Non-Linear Model of the Stakelberg Three-
Agent Oligopoly for the Russian Telecommunication Market // Autom. Remote Con-
trol. 2018. V. 79. No. 5. P. 841-859.
13.
Гераськин М.И. Рефлексивные игры в линейных моделях дуополии Штакель-
берга при несовпадении рангов рефлексии // АиТ. 2020. № 2. С. 134-156.
Geras’kin M.I. Reflexive Games in the Linear Stackelberg Duopoly Models un-
der Incoincident Reflexion Ranks // Autom. Remote Control. 2020. V. 81. No. 2.
P. 302-319.
14.
Гераськин М.И. Свойства предположительных вариаций в нелинейной модели
олигополии Штакельберга // АиТ. 2020. № 6. C. 105-130.
Geras’kin M.I. The Properties of Conjectural Variations in the Nonlinear Stackelberg
Oligopoly Model // Autom. Remote Control. 2020. V. 81. No. 6. P. 1051-1072.
15.
Гераськин М.И. Приближенное вычисление равновесий в нелинейной модели
олигополии Штакельберга на основе линеаризации // АиТ. 2020. № 9. С. 120-
143.
Geras’kin M.I. Approximate Calculation of Equilibria in the Nonlinear Stackelberg
Oligopoly Model: A Linearization Based Approach // Autom. Remote Control. 2020.
V. 81. No. 9. P. 1659-1678.
16.
Гераськин М.И. Рефлексивный анализ равновесий в игре триполии при линей-
ных функциях издержек агентов // АиТ. 2022. № 3. С. 110-131.
Geras’kin M.I. Reflexive Analysis of Equilibria in a Triopoly Game with Linear Cost
Functions of the Agents // Autom. Remote Control. 2022. V. 83. No. 3. P. 389-406.
167
17.
Алгазин Г.И., Алгазина Ю.Г. Рефлексивная динамика в условиях неопределен-
ности олигополии Курно // АиТ. 2020. № 2. С. 115-133.
Algazin G.I., Algazina Yu.G. Reflexion Reflexive Dynamics in the Cournot Oligopoly
under Uncertainty // Autom. Remote Control. 2020. V. 81. No. 2. P. 287-301.
18.
Алгазин Г.И., Алгазина Д.Г. Процессы рефлексии и равновесие в модели оли-
гополии с лидером // АиТ. 2020. № 7. С. 113-128.
Algazin G.I., Algazina Yu.G. Reflexion Processes and Equilibrium in an Oligopoly
Model with a Leader // Autom. Remote Control. 2020. V. 81. No. 7. P. 1258-1270.
19.
Алгазин Г.И., Алгазина Ю.Г. К аналитическому исследованию условий сходимо-
сти процессов рефлексивного коллективного поведения в моделях олигополии //
АиТ. 2022. № 3. С. 84-109.
Algazin G.I., Algazina Yu.G. To the Analytical Investigation of the Convergence
Conditions of the Processes of Reflexive Collective Behavior in Oligopoly Models //
Autom. Remote Control. 2022. V. 83. No. 3. P. 367-388.
20.
Понтрягин Л.С., Болтянский В.Г., Гамкрелидзе Р.В., Мищенко Е.Ф. Матема-
тическая теория оптимальных процессов. М.: Наука, 1983.
21.
Dockner E., Jorgensen S., Long N.V., Sorger G. Differential Games in Economics
and Management Science. Cambridge University Press, 2000.
22.
Ugol’nitskii G.A., Usov A.B. Equilibria in models of hierarchically organized dy-
namic systems with regard to sustainable development conditions // Autom. Remote
Control. 2014. No. 6. P. 1055-1068.
23.
Ougolnitsky G.A., Usov A.B. Solution algorithms for differential models of hierar-
chical control systems // Autom. Remote Control. 2016. No. 5. P. 872-880.
24.
Ougolnitsky G.A., Usov A.B. Computer Simulations as a Solution Method for Differ-
ential Games / Computer Simulations: Advances in Research and Applications. Eds.
M.D. Pfeffer and E. Bachmaier. N.Y.: Nova Science Publishers, 2018. P. 63-106.
25.
Гермейер Ю.Б. Игры с непротивоположными интересами. М.: Наука, 1976.
26.
Современное состояние теории исследования операций. Под ред Н.Н. Моисеева.
М.: Наука, 1979.
27.
Угольницкий Г.А. Теория управления устойчивым развитием активных систем.
Ростов-на-Дону: ЮФУ, 2016.
28.
Bressan A. Noncooperative Differential Games // Milan J. Math. 2011. No. 2.
P. 357-427.
Статья представлена к публикации членом редколлегии Д.А. Новиковым.
Поступила в редакцию 21.04.2022
После доработки 16.09.2022
Принята к публикации 26.10.2022
168