Автоматика и телемеханика, № 3, 2023
Управление в технических системах
© 2023 г. А.В. АНТОНОВ, канд. техн. наук (antonov.av@imash.ru),
А.С. ФОМИН, канд. техн. наук (alexey-nvkz@mail.ru)
(Институт машиноведения им. А.А. Благонравова РАН, Москва)
РЕШЕНИЕ ОБРАТНОЙ КИНЕМАТИЧЕСКОЙ ЗАДАЧИ
ДЛЯ ПЯТИПОДВИЖНОГО МАНИПУЛЯТОРА
ГИБРИДНОЙ СТРУКТУРЫ1
Управление любой робототехнической системой невозможно реализо-
вать без предварительного решения обратной кинематической задачи, со-
стоящей в определении законов управления приводами, требуемых для
реализации заданной траектории движения и закладываемых в систе-
му управления. Настоящая статья посвящена решению обратной кинема-
тической задачи для пятиподвижного манипулятора гибридной (парал-
лельно-последовательной) структуры. После краткого описания структу-
ры манипулятора, включающей трехподвижную параллельную и двух-
подвижную последовательную части и обеспечивающей выходному звену
три вращательные и две поступательные степени свободы, в статье по-
дробно изложен алгоритм решения обратной задачи. Алгоритм основан
на представлении манипулятора в виде эквивалентной системы последо-
вательной структуры и последующем использовании формулы произведе-
ния матричных экспонент. Предлагаемый алгоритм позволяет получить
решение в аналитическом виде без каких-либо допущений на геометрию
манипулятора; рассмотренный пример подтверждает работоспособность
алгоритма. Методика решения обратной задачи может быть также адап-
тирована к анализу других манипуляторов гибридной структуры.
Ключевые слова: манипулятор, параллельно-последовательная (гибрид-
ная) структура, кинематический анализ, обратная кинематическая зада-
ча, кинематический винт, формула произведения матричных экспонент.
DOI: 10.31857/S0005231023030054, EDN: ZZBRNY
1. Введение
Манипуляторы гибридной структуры — это механические устройства,
включающие одновременно несколько кинематических цепей параллельной
и/или последовательной структуры, которые служат основой для множества
многоподвижных робототехнических систем [1]. Такие манипуляторы обла-
дают рядом важных функциональных свойств, в том числе расширенными
1 Исследование выполнено за счет гранта Российского научного фонда № 22-79-10304,
106
габаритами рабочего пространства [2], а также возможностью обходить или
исключать особые положения [3].
Настоящая статья посвящена классу манипуляторов гибридной структу-
ры, обладающих пятью степенями свободы, в которых на параллельную ки-
нематическую цепь наслаивается последовательная. Известен ряд манипуля-
торов такого типа, среди которых: CaHyMan — манипулятор, образованный
трехподвижным модулем параллельной структуры и двухподвижным моду-
лем последовательной структуры [4]; обрабатывающий станок, состоящий из
параллельной части с двумя степенями свободы и последовательной части
с тремя степенями свободы [5]; полировальный станок, включающий трех-
подвижный модуль параллельной структуры для вертикального движения и
вращения относительно горизонтальных осей и двухподвижный модуль по-
следовательной структуры для позиционирования вдоль данных осей [6].
В рамках решения задачи управления робототехническими системами, в
частности манипуляторами гибридной структуры, необходимо получить ре-
шение обратной кинематической задачи (обратной задачи о положениях), за-
ключающейся в определении законов управления приводами при заданной
траектории движения выходного звена. Важность данной задачи обусловле-
на тем, что ее решение закладывается непосредственно в систему управления
манипулятора.
Методы решения обратной кинематической задачи для разнообразных ма-
нипуляторов гибридной структуры можно найти в ряде исследований. Од-
ним из первых исследований в данном направлении является [7], в котором
решение обратной задачи о положениях удалось свести к определению реше-
ния системы трех алгебраических уравнений шестой степени; решение было
найдено численными методами. В [8] автор сопоставил исходному манипуля-
тору гибридной структуры эквивалентный манипулятор последовательной
структуры; используя классический метод Денавита-Хартенберга [9, с. 506]
и составляя соответствующие матрицы однородных преобразований, были
получены кинематические соотношения, на основе которых были найдены
выражения для искомых приводных координат в аналитическом виде. Ана-
логичный метод Денавита-Хартенберга был применен при анализе других
манипуляторов гибридной структуры в [10] (совместно с геометрическим под-
ходом) и [5, 11]. Представление исходного манипулятора гибридной структу-
ры в виде эквивалентного манипулятора последовательной структуры было
также использовано в [12], но вместо метода Денавита-Хартенберга авторы
применили формулу произведения матричных экспонент [9, с. 119]. Данная
формула была также использована в [13, 14]. В указанных выше исследовани-
ях [12-14] структурно-геометрические особенности рассматриваемых манипу-
ляторов дали возможность получить решение обратной кинематической за-
дачи в аналитическом виде. Особенности структуры манипулятора и наличие
кинематической развязки между поступательными и вращательными движе-
ниями выходного звена позволили авторам [15] рассматривать по отдельности
параллельную и последовательную части манипулятора и получить решение
107
обратной задачи о положениях в упрощенном виде. Также в [3, 16-19] можно
найти кинематический анализ других манипуляторов: большинство алгорит-
мов решения основано на использовании алгебраических или геометрических
подходов, каждый из которых индивидуален и зависит от структуры рассмат-
риваемого манипулятора.
Ранее в [1] был представлен ряд новых манипуляторов гибридной струк-
туры, однако решение обратной задачи о положениях, непосредственно свя-
занное с практической задачей управления данными устройствами, было рас-
смотрено лишь для одного из манипуляторов [20]. Настоящее исследование
продолжает упомянутые выше статьи и рассматривает решение обратной за-
дачи о положениях для другого манипулятора гибридной структуры, описа-
ние которого представлено в следующем разделе.
Статья имеет следующую структуру. В разделе 2 приведено описание ис-
следуемого манипулятора. Раздел 3 посвящен алгоритму решения обратной
задачи о положениях, а в разделе 4 приведен численный пример решения
данной задачи согласно предложенному алгоритму. Раздел 5 содержит об-
суждение особенностей алгоритма и краткий сравнительный анализ с други-
ми исследованиями. Заключение обобщает результаты проведенного иссле-
дования и указывает направления его дальнейшего развития. Статья также
имеет два приложения: Приложение 1 приводит краткие теоретические ос-
новы используемого метода решения, а Приложение 2 содержит выражения
коэффициентов, используемых в уравнениях.
2. Описание манипулятора
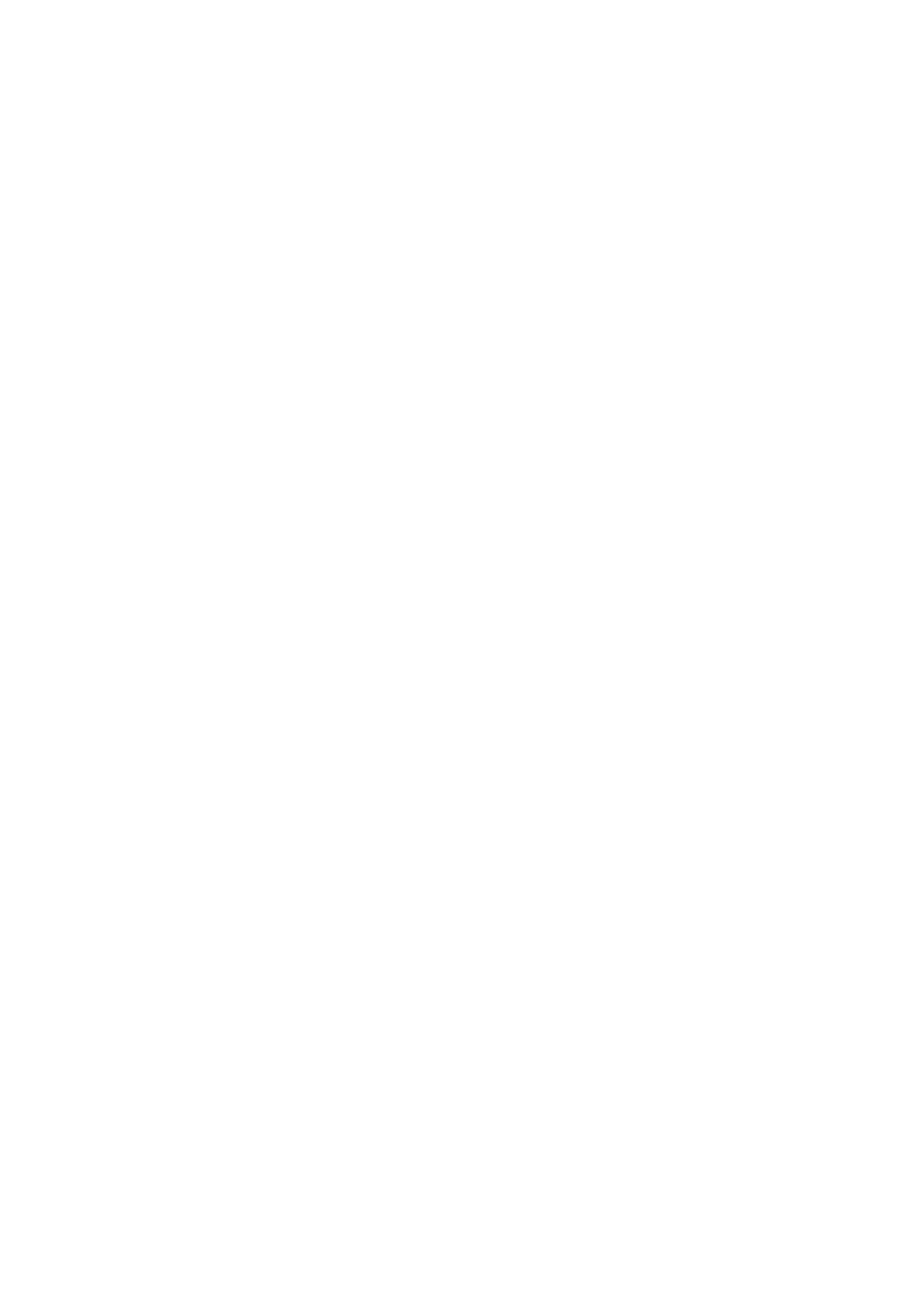
Кинематическая схема исследуемого манипулятора представлена на рис. 1,
где использованы следующие обозначения: 1 — основание; 2, . . . , 5 — проме-
жуточные звенья; 6 — платформа; 7 — каретка; 8 — выходное звено. Мани-
пулятор состоит из параллельной части, образованной звеньями 1, . . . , 6, и
последовательной части, образованной звеньями 7 и 8. Промежуточные зве-
нья 2, . . . , 5 соединены с основанием 1 и платформой 6 вращательными (В)
шарнирами, при этом звенья 2 и 3 соединены друг с другом вращательным
шарниром, а звенья 4 и 5 — поступательным (П ): таким образом, платфор-
ма 6 соединена с основанием 1 двумя кинематическими цепями типа ВВВ и
двумя цепями типа ВПВ. Оси всех упомянутых выше вращательных шарни-
ров параллельны друг другу, что обеспечивает платформе 6 плоское движе-
ние с тремя степенями свободы. Каретка 7 образует в платформой 6 посту-
пательную пару, а с выходным звеном 8 — вращательную, что обеспечивает
выходному звену 8 две степени свободы относительно платформы 6 и пять
степеней свободы относительно основания 1. Единственная степень свобо-
ды, отсутствующая у выходного звена 8, — это вращение относительно оси,
перпендикулярной осям всех прочих вращательных шарниров манипулятора,
поэтому можно считать, что выходное звено 8 обладает тремя поступатель-
ными и двумя вращательными степенями свободы.
108
q5
5
q4
3
4
8
q6
1
2
5
7
q3
6
4
1
q5
q2
1
3
2
q1
1
Рис. 1. Кинематическая схема исследуемого манипулятора.
В данном манипуляторе приводными (управляемыми) шарнирами явля-
ются шарниры, обозначенные на рис. 1 параметрами q1, . . . , q6, где:
• q1 и q2 соответствуют вращениям в приводах цепей ВВВ;
• q3 и q4 соответствуют поступательным перемещениям в приводах це-
пей ВПВ;
• q5 соответствует поступательному перемещению в приводе каретки 7;
• q6 соответствует вращению в приводе выходного звена 8.
Можно видеть, что манипулятор обладает приводной избыточностью: дви-
жение платформы 6 относительно основания 1 осуществляется за счет рабо-
ты четырех приводов, в то время как она обладает тремя степенями свободы.
И хотя такое решение требует согласованной работы данных приводов, на-
личие избыточного привода позволяет повысить жесткость манипулятора и
исключить ряд особых положений, присущих манипуляторам параллельной
структуры [21]. Кроме того, наличие четвертой кинематической цепи позво-
ляет сделать манипулятор симметричным и увеличить его габариты таким
образом, чтобы можно было выполнять операции над объектами протяжен-
ной формы, что и является одним из назначений данного манипулятора [1].
3. Решение обратной задачи о положениях
Фактически обратная задача о положениях заключается в определении
относительного положения звеньев манипулятора в приводных шарнирах
при известной конфигурации выходного звена. В связи с этим сперва необ-
ходимо рассмотреть, как описать эти относительные положения и конфи-
гурацию. Первые можно представить в виде вектора приводных коорди-
[
]T
нат q =
q1
... q6
∈ R6, соответствующих предыдущему разделу. Конфи-
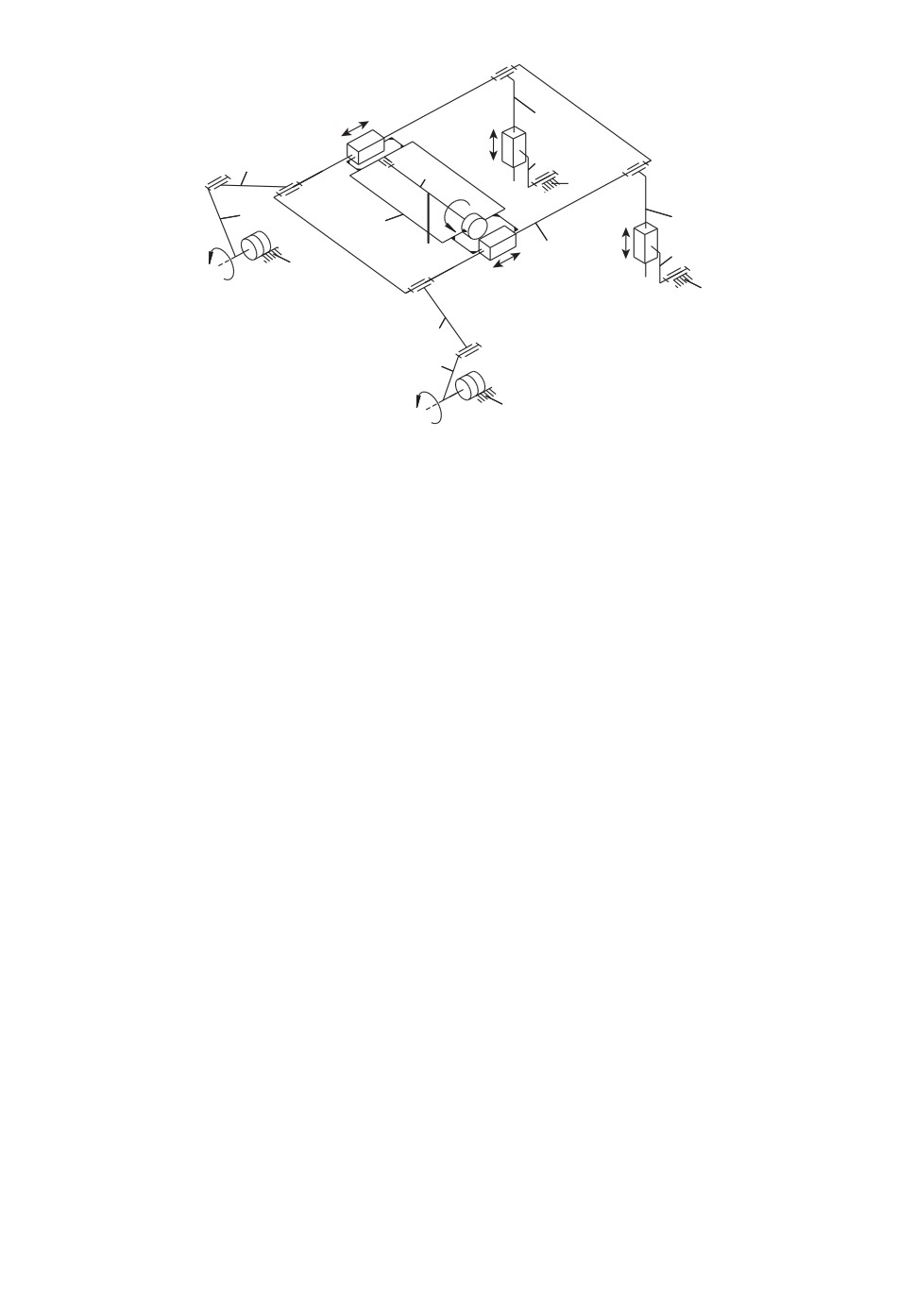
гурацию выходного звена можно описать при помощи вектора pS ∈ R3, опре-
деляющего положение некой точки S выходного звена, и единичного векто-
ра n ∈ R3, ∥n∥2 = 1, определяющего его ориентацию (рис. 2,a). Параметры pS
109
a
б
A4
s
4
q5
q5
ZP
q4
XP
A2
P YP
A3
q6
С2
ZS
ŝ5
B4
ŝ2
ZS
ˆ
ŝ3
B2
q6
XS
S
q3
YS
S
ˆ
q5
z
q2
Z
û
ˆ
YS
B3
A1
XS
O
X
Y
C1
Z
O
B1
X
Y
q1
y
ŝ1
Рис. 2. Кинематический анализ: а — расположение систем координат и при-
водных координат; б — эквивалентная кинематическая цепь с последователь-
ной структурой.
и n задаются относительно неподвижной системы координат OXY Z, распо-
ложенной на основании манипулятора известным (заданным) образом. По-
скольку в рассматриваемом манипуляторе вращательных степеней свободы
у выходного звена всего две, вектора n достаточно для описания его ориен-
тации (нет необходимости использовать матрицу поворота).
Таким образом, решение обратной задачи о положениях сводится к нахож-
дению вектор-функции f : R3 × R3 → R6:
(1)
q = f(pS, n),
∥n∥2
= 1.
Методику решения обратной задачи о положениях можно представить сле-
дующим образом.
Согласно структуре манипулятора, платформа совершает плоское движе-
ние и обладает тремя степенями свободы. В связи с этим мы можем пред-
ставить, что платформа соединена с основанием некой «виртуальной» ки-
нематической цепью типа ППВ, у которой оси поступательных пар парал-
лельны плоскости движения, а ось вращательной пары перпендикулярна
ей (рис. 2,б ). Таким образом, мы можем рассматривать соединение выходного
звена как эквивалентную кинематическую цепь с последовательной структу-
рой ППВПВ. Как будет показано далее, такое представление дает возмож-
ность применить известные методы исследования манипуляторов последова-
тельной структуры к манипулятору гибридного типа.
Пусть SXS YSZS — система координат выходного звена, конфигурация ко-
торой относительно системы координат основания OXY Z определяется мат-
рицей TS ∈ SE(3), так, что:
]
[û v
n pS
(2)
TS =
,
0
0
0
1
110
где û и v — единичные векторы, образующие вместе с вектором n правую
тройку ортонормированных векторов; как будет показано далее, направление
данных векторов не влияет на решение обратной задачи и потому может быть
выбрано произвольным образом.
Рассматривая упомянутую выше кинематическую цепь с последователь-
ной структурой ППВПВ, можно записать матрицу TS через произведение
матричных экспонент следующим образом (см. Приложение 1 и выраже-
ние (Π.2)):
(
)
∏
(3)
TS =
e[ξi]θi MS,
i=1
где MS ∈ SE(3) — матрица, определяющая положение и ориентацию выход-
ного звена в некоторой начальной конфигурации манипулятора; i — поряд-
ковый номер шарнира цепи, считая от основания, i = 1, . . . , 5; ξi ∈ R6 — (еди-
ничный) кинематический винт, соответствующий оси i-го шарнира в началь-
ной конфигурации манипулятора; [ξi] — матричное представление винта ξi
согласно выражениям (Π.1) и (Π.3); θi — перемещение в i-м шарнире.
Для рассматриваемой цепи ППВПВ кинематические винты ξi и переме-
щения θi будут иметь следующий вид согласно выражению (Π.1) и рис. 2,б :
]
]
[
]
]
[
]
[03×1
[03×1
ŝ3
[03×1
ŝ5
(4)
ξ1=
, ξ2=
, ξ3=
, ξ4=
, ξ5=
,
ŝ1
ŝ2
r3 × ŝ3
ŝ4
r5 × ŝ5
(5)
θ1 = y,
θ2 = z,
θ3 = ϕ,
θ4 = q5,
θ5 = q6,
где ŝ1, . . . , ŝ5 — единичные векторы, параллельные осям соответствующих
шарниров; r3 и r5 — векторы, определяющие координаты произвольных точек
на осях соответствующих шарниров; y и z — линейные перемещения платфор-
мы в направлении векторов ŝ1 и ŝ2 (выбор таких обозначений станет понятен
далее); ϕ — поворот платформы вокруг оси, определяемой вектором ŝ3.
Параметры MS , ŝ1, . . . , ŝ5, r3 и r5 определяются конструктивными осо-
бенностями манипулятора и выбранным расположением систем коорди-
нат OXY Z и SXS YSZS , и потому их можно считать известными. Таким об-
разом, при заданной матрице TS выражение (3) представляет собой систему
уравнений относительно неизвестных θi, i = 1, . . . , 5, приведенных в (5). Для
упрощения решения данной системы уравнений можно без потери общности
расположить систему координат OXY Z таким образом, чтобы ось OX была
перпендикулярна плоскости, параллельной осям обоих шарниров П «вирту-
альной» кинематической цепи ППВ (рис. 2,б ). При этом оси данных шарни-
ров можно направить параллельно осям OY и OZ, так, что
[
]T
[
]T
[
]T
(6)
ŝ1 =
0
1
0
,
ŝ2 =
0
0
1
,
ŝ3 =
1
0
0
Подставим (2) и (4)-(6) в (3) и рассмотрим уравнение, соответствующее
первой строке и третьему столбцу выражения (3). Данное уравнение содер-
111
жит всего одну неизвестную q6 и имеет вид:
(7)
a1 cos q6 + b1 sin q6 + c1
= 0,
где a1, b1 и c1 — коэффициенты, известные при решении обратной задачи о
положениях и приведенные в Приложении 2.
Решение уравнения (7) можно найти следующим образом [22, с. 29]:
√
b1 ±
a21 + b21 - c21
(8)
q6 = 2arctg
a1 - c1
Для того чтобы уравнение выше имело действительное решение, подкорен-
ное выражение должно быть неотрицательным. Согласно Приложению 2, при
известных геометрических параметрах манипулятора данное выражение бу-
дет зависеть лишь от одной переменной nx, являющейся проекцией вектора n
на ось OX. Поэтому перед расчетом переменной q6 нужно сперва убедить-
ся в неотрицательности подкоренного выражения для всех значений nx или
как минимум для тех значений nx, для которых решается обратная задача о
положениях. Позже в разделе 4 будет приведен пример такого анализа.
В числителе выражения (8) знак перед корнем соответствует различным
решениям q6. Функция arctg в общем случае также определяет два различных
решения, но, поскольку в правой части (8) перед данной функцией стоит
множитель 2, два данных решения будут соответствовать одному и тому же
значению q6. В итоге получим два различных решения q6, зависящие от знака
перед корнем в числителе (8).
Далее рассмотрим уравнения, соответствующие второй и третьей строкам
и третьему столбцу выражения (3). Их можно привести к виду, аналогично-
му (7):
a2 cosϕ + b2 sin ϕ + c2 = 0,
(9)
a3 cosϕ + b3 sin ϕ + c3 = 0,
где a2, . . . , c3 — коэффициенты, зависящие от найденной выше переменной q6
и приведенные в Приложении 2.
Уравнения (9) можно рассматривать как систему линейных уравнений от-
носительно двух неизвестных cos ϕ и sin ϕ, причем, согласно Приложению 2,
a2 = b3 и b2 = -a3. При таком соотношении коэффициентов данная система
уравнений в общем случае (при a2b3 - a3b2 = 0) будет иметь единственное
решение [22, с. 30], из которого далее можно найти угол ϕ, используя функ-
цию atan2 [9, с. 188]. При этом каждое из двух решений (8) определит свое
решение для угла ϕ.
Далее рассмотрим уравнение, соответствующее первой строке и четвер-
тому столбцу выражения (3). Данное уравнение является линейным относи-
тельно переменной q5:
(10)
a4q5 + b4
= 0,
где a4 и b4 — коэффициенты, зависящие от найденной выше переменной q6 и
приведенные в Приложении 2.
112
При a4 = 0 уравнение (10) дает одно решение для каждого значения q6.
Согласно Приложению 2, a4 = sx4, где sx4 — проекция вектора ŝ4 на ось OX,
определяемая геометрией манипулятора. Если геометрия такова, что дан-
ная проекция равна нулю, вектор ŝ4 будет параллелен плоскости OY Z, как
и векторы ŝ1 и ŝ2. Поскольку три указанных вектора соответствуют осям
поступательных пар эквивалентной кинематической цепи (рис. 2,б ), мы по-
лучим структуру манипулятора, в которой оси трех поступательных пар па-
раллельны одной плоскости. В такой структуре при заданной конфигурации
выходного звена существует бесконечное число комбинаций параметров q5, y
и z, определяющих перемещения в поступательных парах, что также соответ-
ствует бесконечному числу решений уравнения (10). Однако данный случай
имеет исключительно теоретический интерес, поскольку в реальном манипу-
ляторе можно всегда обеспечить геометрию, при которой sx4 = 0.
Наконец, можно рассмотреть уравнения соответствующие второй и тре-
тьей строкам и четвертому столбцу выражения (3). Данные уравнения яв-
ляются линейными относительно переменных y и z и имеют вид, аналогич-
ный (10):
a5y + b5 = 0,
(11)
a6z + b6 = 0,
где a5, . . . , b6 — коэффициенты, зависящие от найденных ранее перемен-
ных q6, ϕ и q5 и приведенные в Приложении 2.
Согласно данному Приложению, a5 = a6 = 1, и уравнения (11) также дают
по одному решению для каждого значения переменной q6.
Таким образом, при заданной конфигурации выходного звена, определяе-
мой матрицей TS, были найдены все неизвестные θi, i = 1, . . . , 5, в том чис-
ле включающие две переменные q5 и q6. Для того чтобы найти оставшиеся
неизвестные q1, . . . , q4, можно снова воспользоваться формулой произведения
матричных экспонент (Π.2), записанной для i = 1, 2 и 3. Пусть P XP YP ZP —
система координат платформы, конфигурация которой относительно систе-
мы координат основания OXY Z определяется матрицей TP , так, что началь-
ной конфигурации платформы соответствует известная матрица MP . Тогда
согласно (Π.2) можно записать:
(
)
∏
(12)
TP =
e[ξi]θi MP ,
i=1
где ξi и θi соответствуют выражениям (4) и (5).
Поскольку параметры θ1, θ2 и θ3 соответствуют параметрам y, z и ϕ,
найденным ранее, выражение (12) позволяет рассчитать матрицу TP . Далее
можно определить координаты pAj, j = 1, . . . , 4, точек Aj, соответствующих
вращательным шарнирам платформы (рис. 2,а), из следующего выражения:
[pAj]
[rAj ]
(13)
=TP
,
j = 1,...,4,
1
1
113
где rAj — координаты точек Aj в системе координат платформы P XP YP ZP ;
данные координаты определяются конструкцией манипулятора и считаются
известными.
Зная координаты pAj , приводные координаты q3 и q4 можно определить
как длину отрезка между точками Aj и Bj, j = 3, 4, где Bj соответствуют
вращательным шарнирам основания (рис. 2,а):
√
(14)
qj = (pAj - pBj)2
,
j = 3,4,
где pBj — координаты точек Bj в системе координат основания OXY Z; дан-
ные координаты определяются конструкцией манипулятора и считаются из-
вестными (мы полагаем без потери общности, что для каждого j = 1, . . . , 4
обе точки Aj и Bj лежат в плоскости, перпендикулярной осям вращательных
шарниров j-й кинематической цепи).
Чтобы найти оставшиеся приводные координаты q1 и q2, сперва опреде-
лим координаты pCj точек Cj , j = 1, 2, соответствующих промежуточным
вращательным шарнирам цепей ВПВ (рис. 2,а). С учетом принятого ранее
направления оси OX можно записать следующие соотношения:
(
)2
(
)2
pyAj - pyCj
+ pzAj -pzCj
=l2AjCj,
(15)
(
)2
(
)2
j = 1,2,
pyBj - pyCj
+ pzBj -pzCj
=l2BjCj,
где pyAj, . . . , pzCj — соответствующие компоненты векторов pAj , pBj и pCj;
lAjCj и lBjCj — длины звеньев AjCj и BjCj соответственно.
Для каждого j = 1, 2 соотношения (15) представляют собой систему двух
квадратных уравнений относительно двух неизвестных pyCj и pzCj . Вычитая
одно уравнение из другого, можно выразить pzCj через pyCj :
(16)
pzCj = a7pyCj + b7
,
j = 1,2,
где a7 и b7 — известные коэффициенты, приведенные в Приложении 2.
Подставляя (16) в любое из двух уравнений (15), получим квадратное
уравнение относительно неизвестной pyCj:
(17)
a8(pyCj)2 + b8pyCj + c8
= 0, j = 1, 2,
где a8, b8 и c8 — известные коэффициенты, приведенные в Приложении 2.
Соотношение выше позволяет в общем случае получить два решения для
переменной pyCj, после чего из выражения (16) можно найти pzCj (квадратное
уравнение (17) будет иметь действительное решение тогда и только тогда, ко-
гда при известной конфигурации платформы манипулятора возможна сбор-
ка его кинематической цепи, т.е. при ∥pAj - pBj ∥2 ≤ lAjCj + lBjCj ). Наконец,
114
зная данные величины и полагая без потери общности, что приводная коор-
дината qj, j = 1, 2, отсчитывается от положительного направления оси Oy,
данную координату можно определить следующим образом:
(
)
(18)
qj = atan2 pzCj - pzBj,pyCj - py
,
j = 1,2.
Bj
Выражения (8), (10), (14) и (18) позволяют определить приводные коорди-
наты q при заданных координатах выходного звена pS и n, т.е. представляют
собой искомую вектор-функцию (1), определяющую решение обратной зада-
чи о положениях для рассматриваемого манипулятора. Согласно проведен-
ному анализу видно, что данная задача может иметь несколько различных
решений (в общем случае возможно получить восемь различных комбина-
ций значений приводных координат), и выбор конкретного решения зависит
от конструктивных особенностей манипулятора и выполняемой им операции.
Так, например, различные решения уравнения (17) соответствуют различ-
ным сборкам кинематических цепей ВВВ (рис. 1): в случае, когда промежу-
точный вращательный шарнир цепи выходит за пределы платформы, рабо-
чая зона манипулятора возрастает, что может быть важно при выполнении
операций над объектами протяженной формы; при этом, однако, также воз-
растают габаритные размеры манипулятора. Кроме того, в зависимости от
сборки кинематической цепи меняются области близости к особым положе-
ниям [23], в которых снижается жесткость манипулятора и возможна потеря
управляемости. Наконец, некоторые сборки могут быть заранее недостижи-
мы в связи с существующими ограничениями на допустимые перемещения
в шарнирах.
4. Численный пример
Рассмотрим пример решения обратной задачи о положениях для манипу-
лятора со следующими параметрами (линейные параметры указаны в мм):
[
]T
[
]T
[
]T
ŝ4 =
1
0
0
,
ŝ5 =
0
1
0
,
r3 = r5 =
0
0
250
,
[
]T
[
]T
rA1 = pB1 =
300
150
0
,
rA2 = pB2 =
300
-150
0
,
[
[
]T
rA3 = pB3 =
-300
150
0]T ,
rA4 = pB4 =
-300
-150
0
,
⎤
⎡
⎤
⎡1
0
0
0
1
0
0
0
⎢0
⎥
⎢
⎥
1
0
0
0
1
0
0
MS =
⎢
⎥
MP =
⎢
⎥
⎣0
0
1
150⎦,
⎣0
0
1
250⎦,
0
0
0
1
0
0
0
1
lAjCj = lBjCj = 100, j = 1,2.
При указанных выше геометрических параметрах платформа и основа-
ние манипулятора имеют одинаковые размеры: прямоугольники A1A2A4A3
и B1B2B4B3 равны друг другу, причем одна из сторон в два раза длиннее
115
300
200
0
1
4
2
100
3
0
300
200
300
100
200
0
100
100
0
100
Y, мм
200
200
X, мм
300
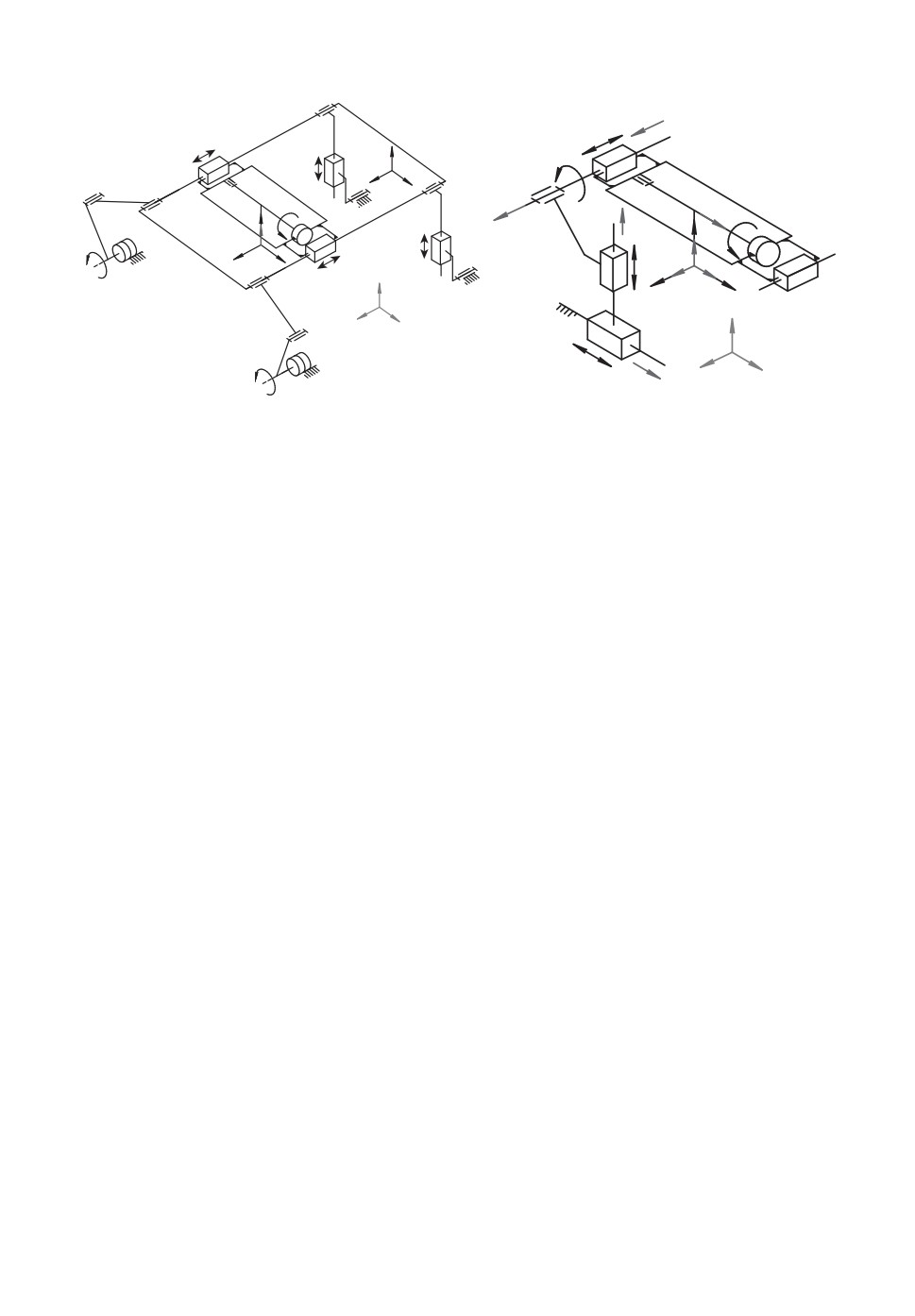
Рис. 3. Манипулятор в начальной конфигурации и заданная траектория дви-
жения.
другой (600 и 300 мм соответственно). В указанной начальной конфигура-
ции, определяемой матрицами MS и MP , плоскость A1A2A4A3 платформы
параллельна плоскости OXY основания и находится на высоте 250 мм над
ней. При этом точка S выходного звена расположена на высоте 150 мм над
плоскостью основания (выходное звено представляется в виде стержня дли-
ной 100 мм). На рис. 3 приведено схематичное изображение манипулятора в
данной конфигурации.
Согласно Приложению 2, при указанных геометрических параметрах в вы-
√
√
ражении (8) получим
a21 + b21 - c21 =
1 - (nx)2. Поскольку |nx| ≤ 1, подко-
ренное выражение будет всегда неотрицательным и уравнение (8) будет иметь
решение. Кроме того, в системе уравнений (9) получим a2b3 - a3b2 = (cos q6)2.
Данное выражение будет равно нулю при q6 = ± π/2: в этом случае вектор n
параллелен оси OX. Очевидно, что при такой ориентации выходного звена
платформа манипулятора может быть наклонена к плоскости основания под
любым углом ϕ, так что обратная задача о положениях будет иметь беско-
нечное количество решений. В связи с этим при планировании траектории
движения выходного звена рассматриваемого манипулятора необходимо из-
бегать конфигураций, для которых q6 = ± π/2.
В качестве заданной траектории движения выходного звена рассмотрим
кусочно-заданную кривую (рис. 3), которая может соответствовать обработке
или анализу поверхности некого протяженного объекта. Данная траектория
симметрична относительно плоскостей OXZ и OY Z и состоит из двух прямо-
линейных участков (1-2 и 3-4) протяженностью 400 мм, расположенных над
плоскостью OXY на высоте 156,6 мм и отстоящих друг от друга на 100 мм, и
двух дугообразных участков (2-3 и 4-1), середина которых расположена над
116
70
270
200
65
100
265
60
0
55
260
100
50
200
45
255
0
3
6
9
12
0
3
6
9
12
0
3
6
9
12
t, c
t, c
t, c
135
270
20
130
10
265
125
0
120
260
10
115
110
255
20
0
3
6
9
12
0
3
6
9
12
0
3
6
9
12
t, c
t, c
t, c
Рис. 4. Результат решения обратной задачи о положениях.
плоскостью OXY на высоте 170 мм. На всей траектории движения выходное
звено лежит в плоскости, параллельной плоскости OY Z, причем на участ-
ках 1-2 и 3-4 оно сохраняет свою ориентацию, образуя с осью OZ угол ±20◦,
а на участках 2-3 и 4-1 оно меняет ориентацию от одного предельного значе-
ния угла до другого (на рис. 3 стрелки обозначают ориентацию инструмента
и соответствуют направлению вектора -n). Движение начинается из точки 0,
находящейся в середине участка 4-1. Временные интервалы движения вдоль
участков 0-1, 1-2, 2-3, 3-4 и 4-0 составляют 1, 4, 2, 4 и 1 c соответственно.
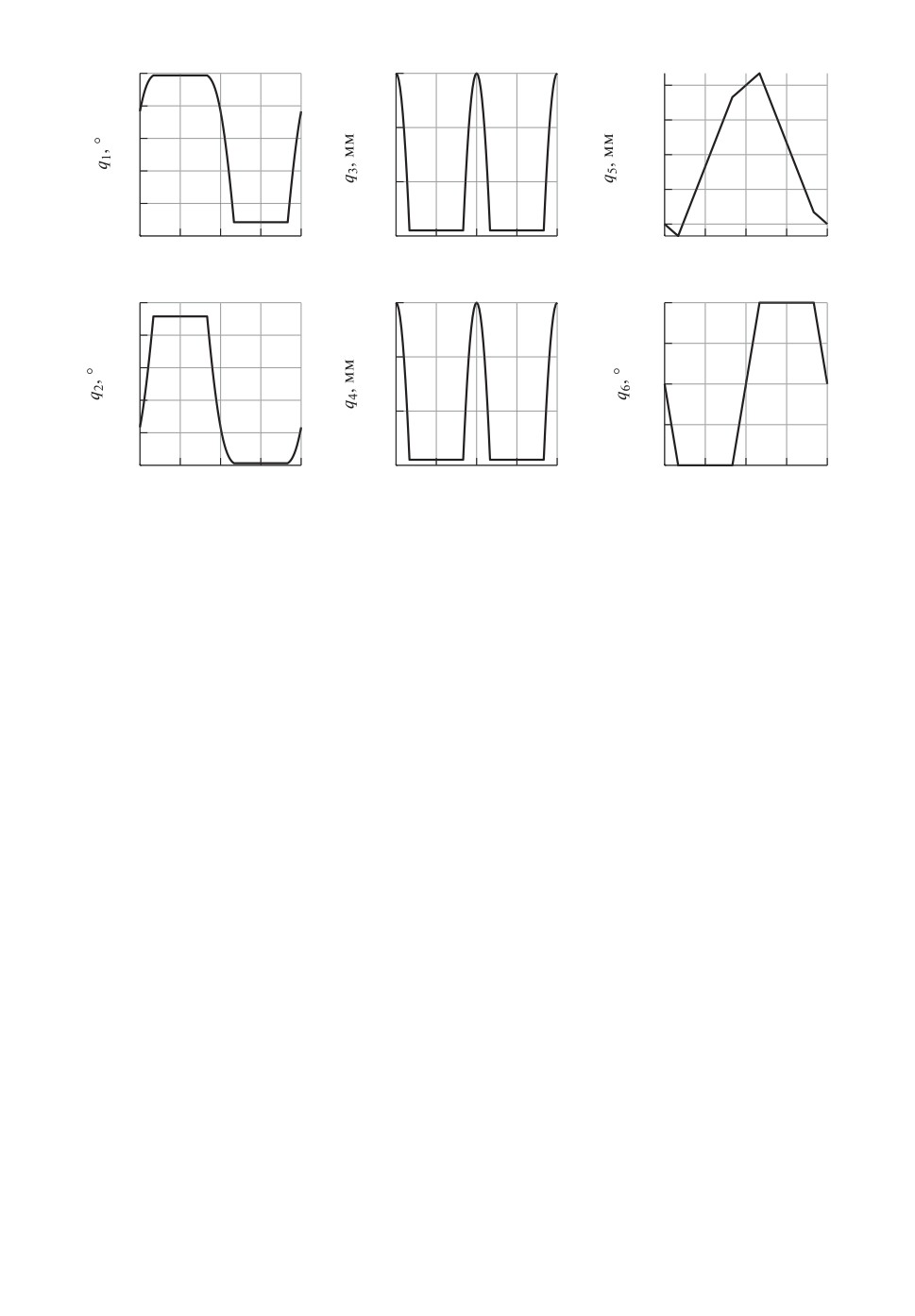
Результаты решения обратной задачи о положениях для указанной гео-
метрии манипулятора и траектории движения приведены на рис. 4 в виде
графиков q(t), где t — время. Можно видеть, что результаты решения также
имеют кусочный вид:
1) При t ≤ 1 c (движение вдоль участка 0-1) платформа манипулятора
опускается и смещается в отрицательном направлении OY , о чем сви-
детельствует увеличение значений q1 и q2 и уменьшение значений q3
и q5. При этом угол отклонения выходного звена меняется от 0 до -20◦,
что соответствует изменению значения q6. Координата q5 также незна-
чительно изменяется, чтобы скомпенсировать наклон выходного звена
и сохранить положение точки S вдоль оси OX неизменным.
2) При 1 < t ≤ 5 c (движение вдоль участка 1-2) платформа манипулято-
ра неподвижна, ориентация выходного звена неизменна, и его линейное
перемещение осуществляется только за счет привода каретки платфор-
мы. Значения q1, . . . , q4 и q6 остаются постоянными, а координата q5
изменяется соответствующим образом.
117
3) При 5 < t ≤ 7 c (движение вдоль участка 2-3) платформа манипуля-
тора смещается в положительном направлении оси OY , что соответ-
ствует уменьшению значений q1 и q2. Кроме того, платформа сперва
поднимается, а затем опускается, о чем свидетельствуют рост и после-
дующее уменьшение значений q3 и q5. При этом выходное звено меняет
свой угол наклона от -20◦ до +20◦, что соответствует изменению зна-
чения q6. Координата q5 незначительно изменяется для компенсации
данного наклона и сохранения неизменного положения точки S вдоль
оси OX.
4) При 7 < t ≤ 11 c (движение вдоль участка 4-5) характер изменения при-
водных координат аналогичен движению вдоль участка 1-2: значение q5
уменьшается, а остальные координаты остаются неизменными.
5) При 11 < t ≤ 12 c (движение вдоль участка 5-0) платформа манипу-
лятора поднимается и смещается в отрицательном направлении OY ,
о чем свидетельствует увеличение значений q1, . . . , q4. Угол отклонения
выходного звена уменьшается от +20◦ до 0, что соответствует измене-
нию значения q6. Изменение координаты q5 направлено на компенсацию
отклонения выходного звена и сохранение неизменным положения точ-
ки S вдоль оси OX. По окончании движения манипулятор возвращает-
ся в исходную точку траектории, что также подтверждается из рис. 4:
q(0) = q(12).
Рассчитанные значения и характер изменения приводных координат соот-
ветствуют геометрическим параметрам манипулятора и заданной траектории
движения выходного звена, что подтверждает корректность предложенного
алгоритма решения обратной задачи о положениях.
5. Обсуждение результатов
Приведенный алгоритм решения обратной задачи о положениях основан
на использовании формул произведения матричных экспонент (3) и (12), ко-
торые позволили установить взаимосвязь между заданными координатами
выходного звена и искомыми приводными координатами. Данный подход тре-
бует лишь значения ряда параметров (ξi, i = 1, . . . , 5, MS и MP ), соответ-
ствующих некоторой начальной конфигурации манипулятора, за которую
может быть принята любая желаемая конфигурация, и определяемых ис-
ключительно геометрией манипулятора и выбранным расположением систем
координат. При этом используемый метод позволяет легко учесть геометри-
ческие неточности расположения осей шарниров: например, если оси шар-
ниров, соответствующих приводным координатам q4 и q5, имеют какие-либо
отклонения, достаточно изменить соответствующим образом кинематические
винты ξ4 и ξ5 — алгоритм в целом сохранит свою работоспособность. Также
согласно Приложению 2 можно видеть, что коэффициенты решаемых урав-
нений не зависят от векторов û, v и их выражений в начальной конфигура-
ции манипулятора (соответствующей матрице MS ): таким образом, как было
118
сказано ранее, направление данных векторов может быть выбрано произволь-
ным образом.
Проводя сравнительный анализ с другими исследованиями, посвященны-
ми решению обратной задачи о положениях прочих манипуляторов гибрид-
ной структуры, отметим, что формула произведения матричных экспонент
была использована в ограниченном количестве исследований. Так, например,
в [13] авторы использовали данную формулу, но только для последователь-
ной части рассматриваемого манипулятора; авторы также сделали ряд до-
пущений на геометрию манипулятора, что позволило получить уравнения
довольно простого вида. В [14] структурно-геометрические особенности ис-
следуемого манипулятора также привели к простым соотношениям, из ко-
торых решение обратной задачи удалось найти методом обратных преобра-
зований (используя обратные матрицы вида e-[ξi]θi ). Кроме того, стоит от-
метить исследование [12], в котором был применен схожий метод, а также
представление исходного манипулятора гибридной структуры в виде экви-
валентного манипулятора последовательной структуры аналогично текущей
статье. Решение обратной задачи о положениях было найдено путем реше-
ния подзадач Падена-Кахана [24, с. 99], но, как отмечают сами авторы, такой
подход можно использовать лишь для определенных структур манипулято-
ров. Что касается прочих исследований, в том числе упомянутых во вве-
дении, большинство из них либо основаны на составлении кинематических
соотношений путем введения дополнительных систем координат (используя
метод Денавита-Хартенберга), либо опираются на структурные особенности
конкретного рассматриваемого манипулятора и учитывают различные гео-
метрические допущения. Используемый в данной статье алгоритм не требует
построения дополнительных систем координат или введения допущений, и
потому его применение также представляет интерес для других манипулято-
ров гибридной структуры.
6. Заключение
Настоящая статья была посвящена разработке алгоритма решения об-
ратной задачи о положениях для пятиподвижного манипулятора гибридной
структуры, состоящего из параллельной части с тремя степенями свободы и
последовательной части с двумя степенями свободы, а также имеющего при-
водную избыточность. Предложенный алгоритм основан на использовании
формулы произведения матричных экспонент и позволяет получить решение
в аналитическом виде, не предъявляя при этом никаких допущений к гео-
метрическим параметрам манипулятора. Согласно алгоритму сперва опре-
деляются координаты, характеризующие ориентацию выходного звена, да-
лее находятся оставшаяся координата последовательной части и координаты,
описывающие расположение платформы параллельной части манипулятора,
и, наконец, определяются неизвестные координаты в кинематических цепях
параллельной части. Рассмотренный пример подтвердил работоспособность
предложенного алгоритма.
119
Полученные кинематические соотношения могут быть использованы при
решении прямой задачи о положениях, состоящей в определении конфигу-
рации выходного звена при заданных значениях приводных координат, что
имеет важное практическое значение и применяется для оценки реального
положения выходного звена путем анализа данных с датчиков, установлен-
ных в приводах манипулятора. Рассмотренные соотношения также лежат в
основе последующего анализа скоростей, особых положений манипулятора и
определения его рабочих зон, что является направлением дальнейшего раз-
вития текущей работы. Кроме того, предложенные в данном исследовании
методики могут быть адаптированы для изучения других манипуляторов ги-
бридной структуры.
Дополнительные материалы
Файлы MATLAB с текстами программ, соответствующих представленным
в данной статье алгоритмам, находятся в свободном доступе онлайн по ссыл-
ПРИЛОЖЕНИЕ 1
Данное Приложение содержит краткие сведения об использовании форму-
лы произведения матричных экспонент (product of exponentials formula [9])
при анализе кинематики манипуляторов.
Пусть выходное звено манипулятора соединено с основанием разомкну-
той кинематической цепью, состоящей из n одноподвижных шарниров (лю-
бой многоподвижный шарнир можно представить в виде комбинации одно-
подвижных). При этом i-му шарниру, i = 1, . . . , n, можно сопоставить (еди-
ничный) кинематический винт ξi ∈ R6:
⎧[
]
⎪
ŝi
⎪
,
если hi = ∞,
]
⎨
[ωi
ri × ŝi + hiŝi
(Π.1)
ξi =
[
]
υi
=⎪⎪
03×1
⎪
,
если hi = ∞,
⎩
ŝi
где ωi ∈ R3 — векторная часть винта; υi ∈ R3 — моментная часть винта;
ŝi — единичный вектор, параллельный оси винта; ri — вектор, определяющий
координаты произвольной точки на оси винта; hi — шаг винта.
Пусть с выходным звеном связана некоторая система координат SXS YS ZS,
конфигурацию которой относительно неподвижной системы координат ос-
нования OXY Z можно описать при помощи матрицы TS ∈ SE(3). Пусть
матрица MS описывает некую начальную конфигурацию манипулятора,
в которой шарнирам цепи можно сопоставить кинематические винты ξi,
i = 1,...,n, согласно выражению (Π.1). Тогда матрицы TS и MS связаны
120
друг с другом следующим образом [9, с. 120]:
(
)
∏
(Π.2)
TS =
e[ξi]θi MS,
i=1
где θi — перемещение в i-м шарнире; [ξi] — матричное представление винта ξi:
]
[Λ(ωi) υi
[ξi] =
∈ se(3),
01×3
0
⎛⎡
⎤⎞
(Π.3)
⎡
⎤
ωxi
0
-ωzi ωyi
⎜⎢
⎥⎟
Λ(ωi) = Λ⎝⎣ωy⎦⎠=⎣
ωzi
0
-ωxi⎦∈so(3).
i
ωzi
−ωyi ωxi
0
Выражение (Π.2) представляет собой формулу произведения матричных
экспонент e[ξi]θi , которые также можно представить следующим образом:
[
(
)
]
eΛ(ωi)θi
I3×3θi + (1 - cosθi)Λ(ωi) + (θi - sin θi)Λ(ωi)2
υi
e[ξi]θi =
,
01×3
1
где eΛ(ωi)θi соответствует матрице поворота вокруг оси, определяемой векто-
ром ωi, на угол θi:
eΛ(ωi)θi = I3×3 + sinθiΛ(ωi) + (1 - cosθi)Λ(ωi)2.
Начальная конфигурация манипулятора MS и соответствующие ей кине-
матические винты ξi, i = 1, . . . , n, определяются конструктивными особен-
ностями рассматриваемого манипулятора и выбором расположения систем
координат SXS YSZS и OXY Z, и потому при анализе кинематики данные па-
раметры считаются заранее известными. Таким образом, соотношение (Π.2)
устанавливает связь между перемещениями θi в шарнирах и конфигураци-
ей выходного звена, описываемой матрицей TS. Данное соотношение может
быть использовано не только для решения прямой задачи о положениях (для
чего оно и применяется в большинстве случаев [9]), но также при решении
обратной задачи, что демонстрируется в настоящей статье на примере мани-
пулятора гибридной структуры.
ПРИЛОЖЕНИЕ 2
Данное Приложение содержит коэффициенты уравнений, используемых
при решении обратной задачи о положениях:
a1 = nx0((sy5)2 + (sz5)2) - ny0sx5sy5 - nz0sx5sz5,
b1 = -ny0sz5 + nz0sy5,
c1 = nx0(sx5)2 + ny0sx5sy5 + nz0sx5sz5 - nx,
121
a2
(sx5s5(1 - cos q6) + sz5 sin q6) + ny0((sy5)2(1 - cos q6) + cos q6) -
- nz0(sx5 sin q6 - sy5sz5(1 - cos q6)),
b2
= nx0(sx5sz5(cos q6 - 1) + sy5 sinq6) - ny0(sx5 sin q6 + sy5sz5(1 - cos q6)) +
+ nz0((sz5)2(cos q6 - 1) - cos q6),
c2
= -ny,
a3
= nx0(sx5sz5(1 - cos q6) - sy5 sinq6) + ny0(sx5 sin q6 + sy5sz5(1 - cos q6)) +
+ nz0((sz5)2(1 - cosq6) + cos q6),
b3
= nx0(sx5sy5(1 - cos q6) + sz5 sinq6) + ny0((sy5)2(1 - cos q6) + cos q6) -
- nz0(sx5 sin q6 - sy5sz5(1 - cos q6)),
c3
= -nz,
a4
=sx4,
b4
= pxS0(((sy5)2 + (sz5)2)(cos q6 - 1) + 1) + pyS0(sx5sy5(1 - cos q6) - sz5 sin q6) +
+ pzS0(sx5sz5(1 - cos q6) + sy5 sin q6) + rx5((sy5)2 + (sz5)2)(1 - cos q6) +
+ ry5(sx5sy5(cos q6 - 1) + sz5 sinq6) + rz5(sx5sz5(cosq6 - 1) - sy5 sinq6) - pxS,
a5
= 1,
b5
= pxS0(sx5sy5(1 - cos q6)cos ϕ + sx5sz5(cos q6 - 1)sin ϕ + sy5 sinq6 sin ϕ +
+ sz5 sinq6 cosϕ) +
+ pyS0(-sx5 sin q6 sin ϕ + (sy5)2(1 - cos q6)cos ϕ + sy5sz5(cos q6 - 1)sin ϕ +
+ cos q6 cos ϕ) +
+ pzS0(-sx5 sin q6 cos ϕ + sy5sz5(1 - cosq6)cos ϕ + (sz5)2(cos q6 - 1)sin ϕ +
+ cos q6 sin ϕ) +
+ q5(sy4 cos ϕ - sz4 sin ϕ) + ry3(1 - cos ϕ) + rz3 sinϕ +
+ rx5(sx5(cos q6 - 1)(sy5 cos ϕ - sz5 sin ϕ) - sy5 sin q6 sin ϕ - sz5 sin q6 cos ϕ +
+ ry5(sx5 sinq6 sinϕ + ((sy5)2 cosϕ - sy5sz5 sinϕ - cosϕ)(cos q6 - 1)) +
+ rz5(sx5 sinq6 cosϕ + (sy5sz5 cosϕ - (sz5)2 sinϕ + sinϕ)(cos q6 - 1)) - pyS,
a6
= 1,
b6
= pxS0(sx5sy5(1 - cos q6)sin ϕ + sx5sz5(1 - cosq6)cos ϕ - sy5 sinq6 cos ϕ +
+ sz5 sinq6 sinϕ) +
+ pyS0(sx5 sin q6 cos ϕ + (sy5)2(1 - cos q6)sin ϕ + sy5sz5(1 - cos q6)cos ϕ +
+ cos q6 sin ϕ) +
+ pzS0(-sx5 sin q6 sin ϕ + sy5sz5(1 - cosq6)sin ϕ + (sz5)2(1 - cosq6)cos ϕ +
+ cos q6 cos ϕ) +
+ q5(sy4 sin ϕ + sz4 cos ϕ) - ry3 sinϕ + rz3(1 - cos ϕ) +
+ rx5(sx5(cos q6 - 1)(sy5 sin ϕ + sz5 cos ϕ) + sy5 sin q6 cos ϕ - sz5 sin q6 sin ϕ +
122
+ ry5(-sx5 sinq6 cosϕ + ((sy5)2 sinϕ + sy5sz5 cosϕ - sinϕ)(cos q6 - 1)) +
+ rz5(sx5 sinq6 sinϕ + (sy5sz5 sinϕ + (sz5)2 cosϕ - cosϕ)(cos q6 - 1)) - pzS,
y
p
-pyBj
Aj
a7 = -
,
pzAj - pz
Bj
y
(p
)2 + (pzAj)2 - (pyBj)2 - (pzBj)2 - l2AjCj + l2BjCj
Aj
b7 =
,
2(pzAj - pzBj)
a8 = 1 + a27,
b8 = -2pyAj - 2a7(pzAj - b7),
c8 = (pzAj - b7)2 - l2AjCj,
где pxS, pyS , pzS и nx, ny, nz — соответствующие компоненты векторов pS и n;
pxS0, pyS0, pzS0 и nx0, ny0, nz0 — те же компоненты, соответствующие начальной
конфигурации манипулятора (матрице MS в выражении (3)); sx4, . . . , sz5 —
соответствующие компоненты векторов ŝ4 и ŝ5.
СПИСОК ЛИТЕРАТУРЫ
1.
Ganiev R.F., Glazunov V.A., Filippov G.S. Urgent problems of machine science
and ways of solving them: Wave and additive technologies, the machine tool indus-
try, and robot surgery // J. Mach. Manuf. Reliab.
2018. Vol. 47. P. 399-406.
2.
Wen K., Harton D., Laliberté T., Gosselin C. Kinematically redundant (6+3)-dof
hybrid parallel robot with large orientational workspace and remotely operated grip-
per // Proc. 2019 IEEE Inter. Conf. Robotics and Automation. Montreal, QC,
Canada, 20-24 May 2019. P. 1672-1678.
3.
Liu Q., Huang T. Inverse kinematics of a 5-axis hybrid robot with non-singular tool
path generation // Robot. Comp. Integ. Manuf. 2019. Vol. 56. P. 140-148.
4.
Carbone G., Ceccarelli M. A stiffness analysis for a hybrid parallel-serial manipula-
tor // Robotica. 2004. Vol. 22. No. 5. P. 567-576.
5.
Lai Y.-L., Liao C.-C., Chao Z.-G. Inverse kinematics for a novel hybrid parallel-
serial five-axis machine tool // Robot. Comp. Integ. Manuf. 2018. Vol. 50. P. 63-79.
6.
Oba Y., Kakinuma Y. Simultaneous tool posture and polishing force control of un-
known curved surface using serial-parallel mechanism polishing machine // Prec.
7.
Waldron K.J., Raghavan M., Roth B. Kinematics of a hybrid series-parallel mani-
pulation system // J. Dyn. Sys., Meas., Control. 1989. Vol. 111. No. 2. P. 211-221.
8.
Cheng H.H. Real-time manipulation of a hybrid serial-and-parallel-driven redundant
industrial manipulator // J. Dyn. Sys., Meas., Control.
1994. Vol. 116. No. 4.
123
9.
Lynch K.M., Park F.C. Modern robotics: Mechanics, planning, and control. Cam-
10.
Tang Z., Payandeh S. Design and modeling of a novel 6 degree of freedom haptic
device // Proc. 3rd Joint EuroHaptics Conf. and Symp. on Haptic Interfaces for
Virtual Environment and Teleoperator Systems. Guilin, China, 19-23 December
11.
Yan C., Gao F., Zhang Y. Kinematic modeling of a serial-parallel forging mani-
pulator with application to heavy-duty manipulations // Mech. Based Des. Struct.
Mach. 2010. Vol. 38. No. 1. P. 105-129.
12.
Sun P., Li Y.B., Wang Z.S., Chen K., Chen B., Zeng X., Zhao J., Yue Y. Inverse dis-
placement analysis of a novel hybrid humanoid robotic arm // Mech. Mach. Theory.
13.
Yang G., Chen W., Ho E.H.L. Design and kinematic analysis of a modular hybrid
parallel-serial manipulator // Proc.
7th Inter. Conf. on Control, Automation,
Robotics and Vision. Singapore, 2-5 December 2002. Vol. 1. P. 45-50.
14.
Tang C., Zhang J., Cheng S. Kinematics analysis for a hybrid robot in minimally
invasive surgery // Proc. 2009 IEEE Inter. Conf. on Robotics and Biomimetics.
Guilin, China, 19-23 December 2009. P. 1941-1946.
15.
Lee M.K., Park K.W., Choi B.O. Kinematic and dynamic models of hybrid robot
manipulator for propeller grinding // J. Robot. Sys. 1999. Vol. 16. No. 3. P. 137-150.
16.
Pisla D., Gherman B., Vaida C., Suciu M., Plitea N. An active hybrid parallel robot
for minimally invasive surgery // Robot. Comp. Integ. Manuf. 2013. Vol. 29. No. 4.
17.
Hu B., Shi Y., Xu L., Bai P. Reconsideration of terminal constraint/mobility and
kinematics of 5-DOF hybrid manipulators formed by one 2R1T PM and one RR
SM // Mech. Mach. Theory. 2020. Vol. 149. P. 103837.
18.
Ye H., Wang D., Wu J., Yue Y., Zhou Y. Forward and inverse kinematics of a
5-DOF hybrid robot for composite material machining // Robot. Comp. Integ.
19.
López-Custodio P.C., Fu R., Dai J.S., Jin Y. Compliance model of Exechon mani-
pulators with an offset wrist // Mech. Mach. Theory. 2022. Vol. 167. P. 104558.
20.
Antonov A., Fomin A., Glazunov V., Kiselev S., Carbone G. Inverse and forward
kinematics and workspace analysis of a novel 5-DOF (3T2R) parallel-serial (hybrid)
manipulator // Int. J. Adv. Robot. Sys. 2021. Vol. 18. No. 2. P. 2963.
21.
Gosselin C., Schreiber L.-T. Redundancy in parallel mechanisms: A review // Appl.
22.
Waldron K.J., Schmiedeler J. Kinematics // Springer Handbook of Robotics. Cham:
124
23. Liu S., Qiu Z., Zhang X. Singularity and path-planning with the working mode
conversion of a 3-DOF 3-RRR planar parallel manipulator // Mech. Mach. Theory.
24. Murray R.M., Li Z., Sastry S.S. A mathematical introduction to robotic manipula-
Статья представлена к публикации членом редколлегии П.В. Пакшиным.
Поступила в редакцию 22.08.2022
После доработки 23.10.2022
Принята к публикации 26.10.2022
125