Автоматика и телемеханика, № 3, 2023
Управление в технических системах
© 2023 г. C.Л. СЕМАКОВ, д-р физ.-мат. наук (slsemakov@yandex.ru)
(Московский физико-технический институт;
Московский автомобильно-дорожный институт),
М.В. СЕМАКОВА (marina.semakowa@yandex.ru)
(Московский государственный технический университет
гражданской авиации)
УПРАВЛЕНИЕ ТЯГОЙ
ПРИ ПОСАДКЕ САМОЛЕТА НА КОРАБЛЬ
Рассматривается посадка самолета на корабль. Предлагаются схема
вычисления вероятности ухода на второй круг и схема вычисления макси-
мальной просадки траектории самолета после схода с палубы. Одним из
управляющих параметров, определяющих указанные вероятность и про-
садку, является момент увеличения тяги двигателя перед касанием палу-
бы. Существующие требования, налагаемые на упомянутые вероятность
и максимальную просадку, позволяют определить диапазон допустимых
моментов увеличения тяги. Приводятся результаты численных расчетов,
полученные при рассмотрении посадки реального самолета на реальный
авианесущий корабль.
Ключевые слова: посадка самолета, корабль, вероятность, управление, тя-
га, траектория.
DOI: 10.31857/S0005231023030066, EDN: ZZFTZN
1. Описание проблемы
Хорошо известно, что посадка является наиболее сложным и ответствен-
ным этапом полета. Вопросам обеспечения точности и безопасности посад-
ки самолета, в частности самолетов корабельного базирования, посвящено
немало работ отечественных и зарубежных авторов (см., например, [1-13]).
Посадка на корабль усложнена тем, что посадочная поверхность является
подвижной и ограничена по длине. Это предъявляет повышенные требова-
ния к точности посадки корабельных самолетов и обусловливает специфи-
ку их приземления, заключающуюся в зацеплении гаком самолета одного из
нескольких тросов аэрофинишера, натянутых поперек посадочного участка
палубы. При этом предусматривается возможность незацепления аэрофини-
шера и, как следствие, пробега самолета по палубе, являющегося одновре-
менно и разбегом для последующего взлета и ухода на второй круг1. Число
1 Решение об уходе на второй круг может быть принято, конечно, и до предполагаемого
момента касания палубы, если станет ясно, что по той или иной причине вероятность
успешного приземления недостаточно высока. Этот аспект корабельной посадки подробно
рассматривается в [10].
126
таких уходов на второй круг достаточно велико и по статистике составляет
один-два процента от общего числа посадок.
В случае незацепления аэрофинишера из-за малости времени пробега по
палубе (полторы-две секунды) самолет не успевает разогнаться до приемле-
мой скорости к моменту схода с палубы, так что непосредственно после схода
с палубы сила тяжести преобладает над подъемной силой, вследствие чего
начальный участок траектории самолета после схода с палубы имеет неко-
торую просадку по отношению к уровню палубы. При фиксированных углах
тангажа и атаки в момент схода и заданном законе управления рулем вы-
соты максимальная просадка однозначно определяется скоростью самолета
в момент схода с палубы. Чтобы предотвратить возможное касание водной
поверхности и обеспечить успешный взлет самолета, необходимо стремить-
ся как можно меньшей сделать максимальную просадку. А для этого нужно
повышать скорость самолета в момент схода с палубы.
Увеличение скорости схода может быть достигнуто за счет приращения тя-
ги двигателя. Тяга нарастает не мгновенно, и в случае незацепления аэрофи-
нишера для ощутимого разгона самолета при его движении по палубе летчи-
ку приходится увеличивать тягу двигателя до предполагаемого момента каса-
ния палубы. При этом нужно учитывать следующее обстоятельство, ограни-
чивающее диапазон возможных моментов дачи тяги как сверху, так и снизу.
Если тягу увеличивать рано, то скорость схода будет высокой, максимальная
просадка — небольшой. Но раннее увеличение тяги приведет к заметному
возрастанию посадочной скорости, что, в свою очередь, вызовет тенденцию к
перелету зоны аэрофинишера и уменьшению вероятности успешного призем-
ления. Если же увеличение тяги двигателя происходит поздно, то — в случае
незацепления аэрофинишера — самолет будет иметь недостаточную скорость
схода и, как следствие, недопустимо большую максимальную просадку тра-
ектории после схода с палубы.
Таким образом, возникает вопрос о нахождении диапазона допустимых
моментов дачи тяги: с одной стороны, нужно обеспечить достаточно высо-
кую вероятность успешного приземления, а с другой — при незацеплении
аэрофинишера — незначительную максимальную просадку, гарантирующую
некасание с водой. Ответ на этот вопрос и является целью настоящей работы.
2. Предлагаемая схема решения проблемы
Будем рассматривать только продольное движение самолета. Траекторию,
по которой происходит посадка при отсутствии дачи тяги вплоть до момента
касания палубы и по которой самолет движется при отсутствии возмуще-
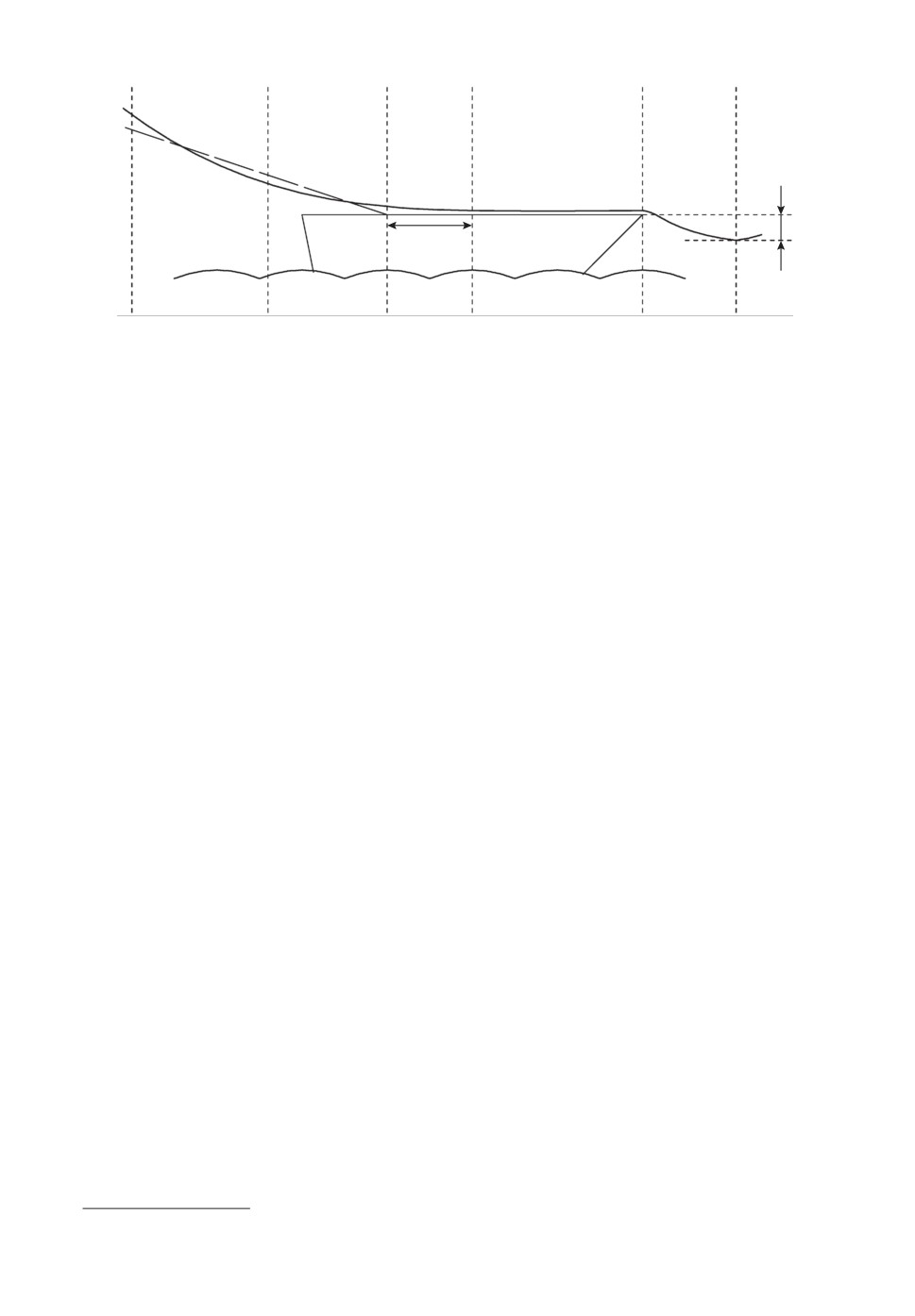
ний, будем называть номинальной. Номинальная траектория представляет
собой прямую линию (наклонная пунктирная линия на рис. 1); ее пересече-
ние с палубой корабля при отсутствии качки происходит в заданной точке O
(см. рис. 1). Через sаф обозначена длина участка палубы, занимаемого аэро-
финишером. Для описания посадочной траектории введем в рассмотрение
127
A
B
C
C
1
D
E
Hпр
O
sаф
A
B
C
C1
D
E
Рис. 1.
вспомогательные плоскости A-A, B-B, C-C, C1-C1, D-D и E-E, перпен-
дикулярные вертикальной плоскости, в которой рассматриваются движения
самолета и корабля и которая совпадает с плоскостью рис. 1. Линиями A-A,
B-B, C-C, C1-C1, D-D и E-E на рис. 1 изображены проекции соответствую-
щих плоскостей на плоскость рис. 1. Плоскость A-A находится на расстоя-
нии 2,5-секундного полета по номинальной траектории до момента касания
палубы; в системе координат, связанной с кораблем, эта плоскость неподвиж-
на. Плоскость B-B соответствует моменту дачи тяги, т.е. в тот момент, ко-
гда самолет пересекает плоскость B-B, летчик увеличивает тягу двигателя.
Плоскости C-C и C1-C1 связаны с кораблем и ограничивают участок палу-
бы, занимаемый аэрофинишером. Плоскость D-D тоже связана с кораблем
и соответствует моменту схода самолета с палубы, если не произошло за-
цепления аэрофинишера. В этой работе будем предполагать, что зацепление
аэрофинишера не происходит только в том случае, если имеет место перелет
зоны sаф. В противном случае предполагается, что зацепление происходит
с вероятностью 1. Наконец, плоскость E-E соответствует моменту достиже-
ния траекторией максимальной просадки после схода самолета с палубы.
Предлагаемая схема решения задачи заключается в следующем. По ме-
тоду2, описанному в [5, 13] (см. также [2, 9]), поточечно определяется веро-
ятность Pнз перелета зоны аэрофинишера sаф (вероятность незацепления) в
зависимости от момента tp увеличения тяги двигателя. В качестве случайных
возмущений выступают атмосферная турбулентность и качка корабля. После
этого рассматриваются те траектории, которым соответствует фактический
перелет зоны аэрофинишера. При этом оказывается, что при заданном мо-
менте tp дачи тяги модуль v = |v| вектора v скорости самолета в момент схода
с палубы и, как следствие, максимальная просадка |Hпр| траектории после
схода практически не зависят от разброса точек касания самолета с палубой
и однозначно определяются моментом tp и углом θ между вектором v в мо-
мент схода самолета с палубы и горизонтальной плоскостью. Это позволяет
2 Этот метод основан на результатах, полученных в [14] и затем усиленных в [15, 16].
128
упрощенно рассматривать участок движения самолета по палубе и после схо-
да с нее в детерминированной постановке и путем интегрирования уравнений
движения численно определить Hпр в функции от tp и θ.
В результате получаются две зависимости: Pнз(tp) и Hпр(tp, θ). Существу-
ют общепринятые ограничения на Pнз. Такие же ограничения существуют и
на Hпр при отсутствии качки корабля, т.е. при θ = 0. Последнее обстоятель-
ство позволяет сделать еще одно упрощение, а именно не учитывать качку
корабля при рассмотрении пробега самолета по палубе. Из условия соблюде-
ния ограничений на Pнз и Hпр затем и определяется диапазон допустимых
моментов tp увеличения тяги двигателя.
3. Вероятность незацепления аэрофинишера
Будем считать, что с момента tp тяга двигателя F (t) нарастает по экспо-
ненциальному закону, т.е.
⎧
⎨F0 при t ≤ tp,
(
{
})
(1)
F (t) =
t-tp
⎩F0 + ΔF
1 - exp
-
при t ≥ tp,
τ
где tp — момент дачи тяги, τ — постоянная, характеризующая приемистость
двигателя, F0 и ΔF — фиксированные величины. Вероятность удара само-
лета о кормовой срез палубы корабля пренебрежимо мала3, так что вероят-
ность незацепления аэрофинишера, принимаемая равной вероятности пере-
лета зоны аэрофинишера sаф, может быть определена как Pнз = 1 - P , где
P — вероятность приземления самолета на участок палубы корабля от линии
кормового среза до линии, совпадающей с последним тросом аэрофинишера,
т.е. с правым концом отрезка sаф на рис. 1.
Для определения вероятности P используем метод, описанный в [5, 13].
Этот метод предполагает линеаризацию уравнений движения самолета (урав-
нений (9) из [5]) относительно номинальной траектории посадки, по которой
двигался бы самолет при отсутствии возмущений. Отличие от [5, 13] в данном
случае носит чисто технический характер и связано с тем, что номинальная
траектория посадки является прямой линией только до момента tp дачи тя-
ги, а после этого момента она отклоняется от прямой линии вследствие новой
зависимости тяги от времени по формуле (1); в [5, 13] тяга предполагалась
постоянной вплоть до момента касания палубы.
Расчеты проводились при ΔF = F0, т.е. тяга после момента tp асимпто-
тически увеличивалась в два раза, и для трех значений постоянной τ, ха-
рактеризующей приемистость двигателя: τ = 1 c, τ = 1,5 c и τ = 2 c. Рас-
сматривался тот же самолет с тем же законом управления (по принципу ав-
томатической обратной связи), что и в [5, 13]. По своим характеристикам
3 Меньше 10-5 при умеренных балльностях волнения моря [1].
129
1,00
= 1,0 c
0,75
= 1,5 c
0,50
= 2,0 c
0,25
0
0,5
1,0
1,5
2,0
2,5
t, c
Рис. 2.
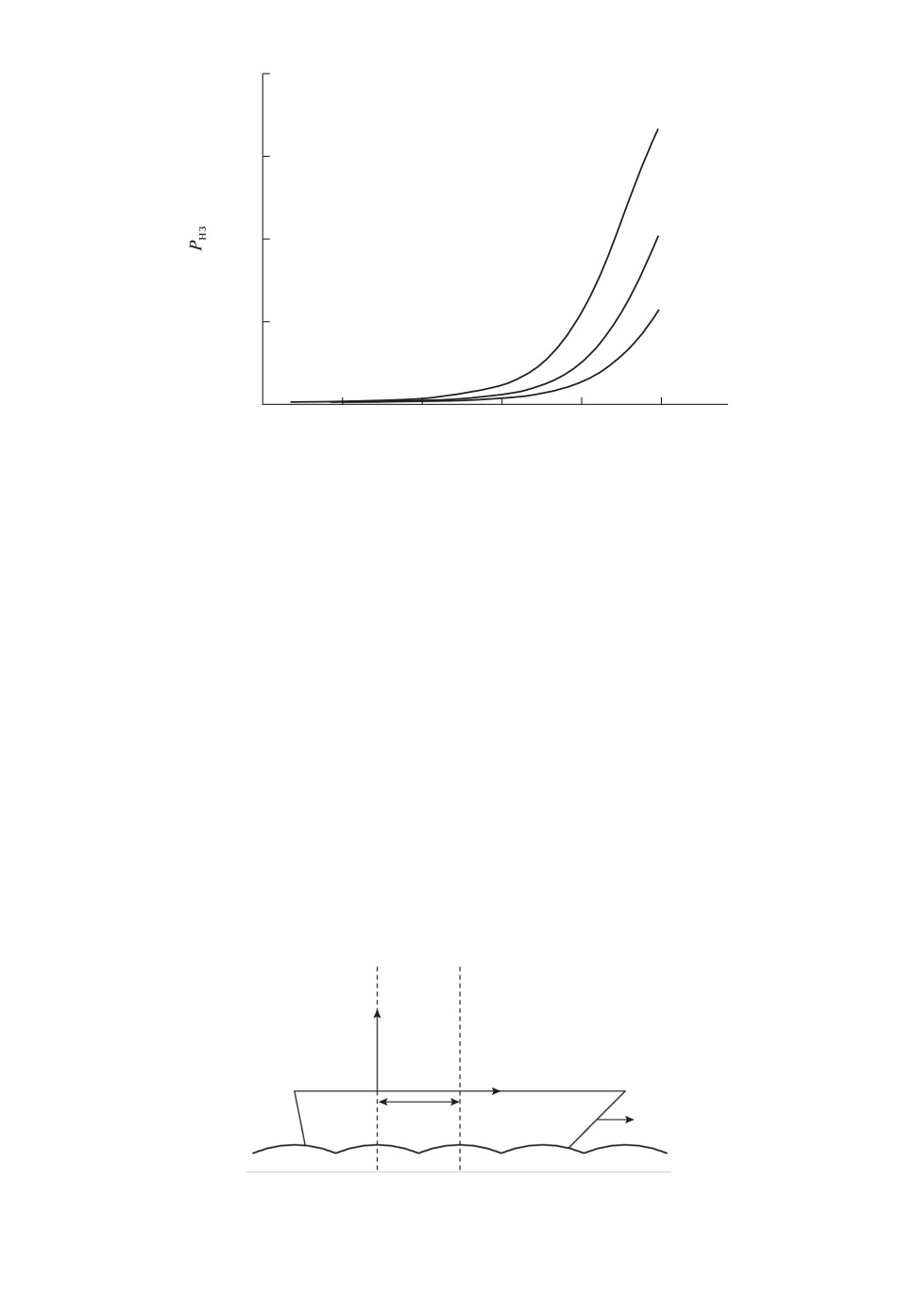
этот самолет идентичен корабельному самолету МиГ-29К. Полученные ре-
зультаты для вероятности Pнз представлены на рис. 2. По горизонтальной
оси отложен промежуток времени Δt = tland - tp, определяющий момент да-
чи тяги tp и представляющий собой время от момента tp до предполагаемого
(математического ожидания) момента tland касания палубы в случае, если бы
увеличения тяги не произошло. Численные значения вероятности Pнз, по ко-
торым построены графики на рис. 2, вынесены в Приложение и представлены
в табл. 1.
4. Скорость самолета в момент касания палубы
Эта скорость необходима для последующего нахождения просадки Hпр.
Продольное движение самолета в неспокойной атмосфере описывается си-
стемой (9) из [5]. Решая задачу определения искомой скорости в детерми-
нированной постановке, т.е. при отсутствии атмосферной турбулентности и
качки, получим в корабельной системе координат Oxy (см. рис. 3) из упомя-
С
С1
y
O
N x
K
sаф
V
С
С1
Рис. 3.
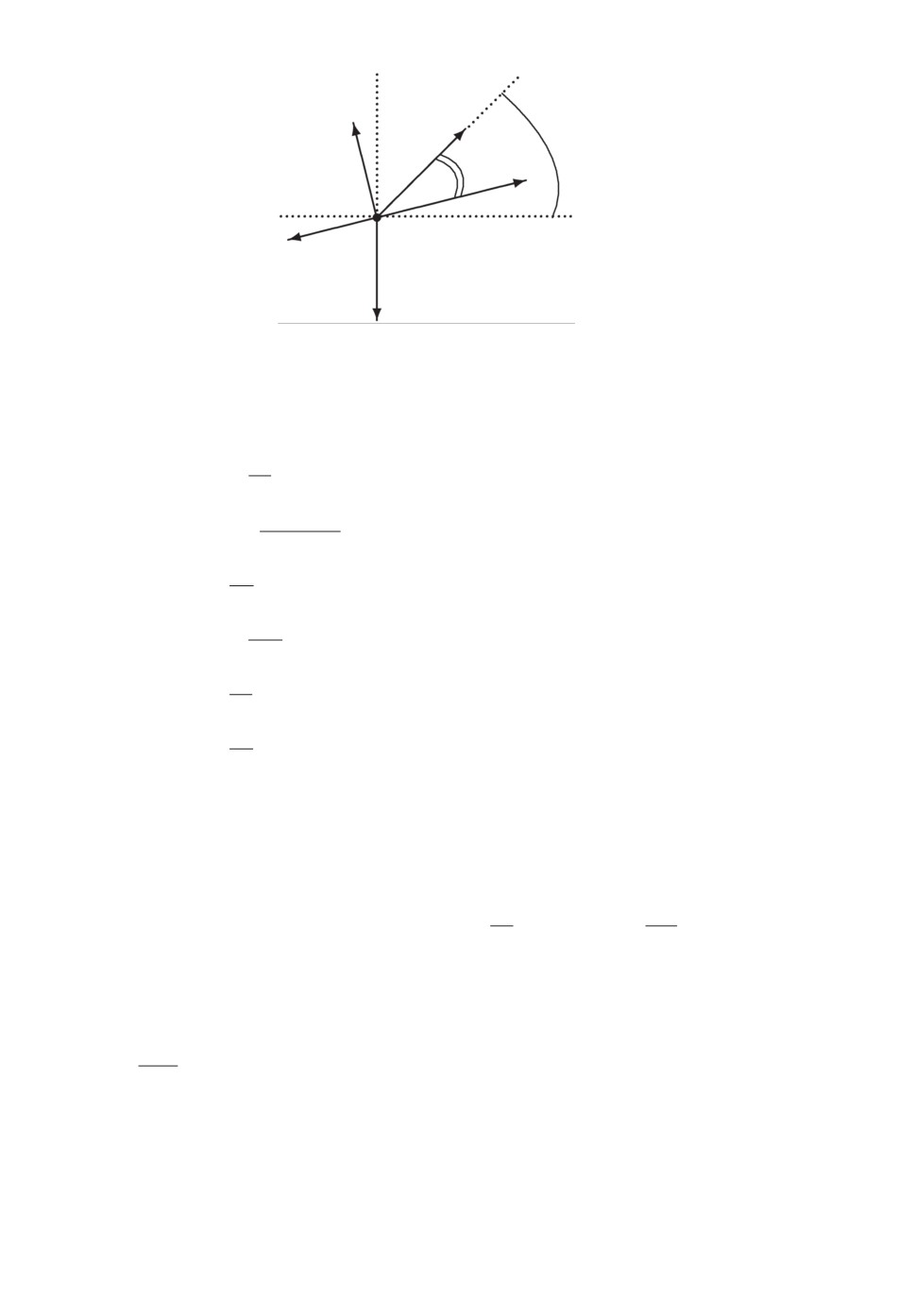
130
ось фюзеляжа
F
Y
v
центр масс
X
самолета
mg
Рис. 4.
нутой выше системы (9) следующую:
⎧
dv
⎪
m
= F(t)cosα - mg sin(ϑ - α) - qSCx,
⎪
⎪
dt
⎪
⎪
d(ϑ - α)
⎪mv
= qSCy + F(t)sin α - mg cos(ϑ - α),
⎪
dt
⎪
⎪dϑ
⎨
=ωz,
dt
(2)
⎪
dωz
⎪Iz
= qSbAmz,
⎪
dt
⎪
⎪dy
⎪
= vsin(ϑ - α),
⎪
⎪dt
⎪
x
⎩d
= vcos(ϑ - α) - V.
dt
Все используемые здесь обозначения подробно описаны в [5, 13]. Они явля-
ются общепринятыми для задач динамики полета самолета. В частности,
Cy = Cy0 + Cαyα + Cδyδ, Cx = Cx0 + AC2y,
2
bA
ρv
mz = mz0 + mαzα + mδzδ +
,
mwzzwz, q =
v0
2
где δ — отклонение органа продольного управления; v — модуль вектора
скорости самолета в неподвижной земной системе координат; Cy0, Cαy, Cδy,
A, Cx0, mαz, mδz, mz0, mwzz
— аэродинамические коэффициенты самолета;
wz =wzbAv0 ;Cx—безразмерныйкоэффициентсилысопротивлениявоздухаX
(см. рис. 4): Cx = |X|/qS; Cy — безразмерный коэффициент подъемной силы
Y: Cy = |Y|/qS; bA — средняя аэродинамическая хорда крыла; mz — без-
размерный коэффициент продольного момента Mz: Mz = mzqSbA; Iz — соот-
ветствующий момент инерции самолета; ϑ — угол тангажа, т.е. угол между
осью фюзеляжа и горизонтальной плоскостью; S — площадь крыла в плане;
g = |g|, где g — вектор ускорения свободного падения.
131
Закон управления для δ примем таким же, как в [5, 13]. Это замкнет си-
стему уравнений (2), после чего последняя может быть проинтегрирована
численно.
Реальные наблюдения показывают, что при незацеплении аэрофинишера
скорость самолета в момент схода с палубы практически не зависит от точки
начального касания самолета с палубой и однозначно определяется момен-
том tp. Поэтому в качестве точки начального касания самолета с палубой
можно принять точку N (см. рис. 3), соответствующую касанию палубы сра-
зу за последним тросом аэрофинишера, а искомую скорость vкас самолета в
момент касания определить как vкас = v(tкас), где v(t) — функция, опреде-
ляемая в результате численного интегрирования системы (2), а момент tкас
предварительно определяется при этом из условия x(tкас) = sаф (см. рис. 3).
Результаты численных расчетов скорости vкас в зависимости от момента tp
для трех рассматриваемых значений приемистости двигателя τ (τ = 1 c, τ =
= 1,5 c и τ = 2 c) представлены в Приложении в табл. 3.
5. Скорость самолета в момент схода с палубы
Движение самолета по палубе описывается уравнением
2
dv
ρv
(3)
m
= F(t) -
SCx
− fG,
dt
2
где G = mg, f — коэффициент трения, ρ — плотность воздуха. Будем считать,
что при движении по палубе α ≡ 0 и δ ≡ 0. Представим v(t) в виде суммы
v(t) = vкас + Δv(t), tкас ≤ t ≤ tсх,
где tсх — момент схода самолета с палубы. Заметим, что Δv(t) ≪ vкас в силу
малости времени tсх - tкас пробега по палубе. Поэтому можно линеаризовать
уравнение (3) относительно функции Δv(t). Это приводит к уравнению
)
dΔv
Cx
(F0
Cx ρv2кас
F (t) - F0
+ρ
vкасΔv = g
-f -
+g
,
dt
m/S
G
m/S
2
G
где Cx = Cx0 + AC2y0, поскольку α = δ = 0; Δv(tкас) = 0. Решая это уравне-
ние, получим для функции Δv(t), tкас ≤ t ≤ tсх, явное выражение:
(
)
b1 + gΔF0/G
Δv(t) =
1 - exp{-a1(t - tкас)} +
a1
{
}(
{
}
)
gΔF0
τ
tкас - tp
t-tкас
+
exp
-
exp
-
- exp{-a1(t - tкас)}
,
G
1-a1τ
τ
τ
где
)
Cxvкас
(F0
Cx ρv2кас
a1 = ρ
,
b1 = g
-f -
m/S
G
m/S
2
132
Обозначим через T время пробега самолета по палубе от момента tкас до
момента tсх, т.е. T = tсх - tкас, а через L — длину участка палубы, пробегае-
мого самолетом от момента tкас до момента tсх. Как было замечено в преды-
дущем разделе 4, скорость самолета в момент схода с палубы практически
не зависит от точки начального касания палубы. Поэтому можно принять
L = NK (см. рис. 3). Тогда
∫
(
)
b1 + gΔF0/G
NK =
(vкас + Δv(t) - V )dt = vкас - V +
T +
a1
tкас
{
}(
{
})
2
gΔF0
τ
tкас - tp
T
+
exp
-
1 - exp
-
-
G
1-a1τ
τ
τ
{
(b1 + gΔF0/G
gΔF0
τ
tкас - tp
}) 1 - exp{-a1T }
-
+
exp
-
a1
G
1-a1τ
τ
a1
Отсюда получается следующее уравнение для определения T :
(4)
T = ψ(T),
где
)
∕(
b1 + gΔF0/G
ψ(T )
ψ(T ) vкас - V +
,
a1
{
})
(b1 + gΔF0/G
gΔF0
τ
tкас - tp
ψ(T ) = NK +
+
exp
-
×
a1
G
1-a1τ
τ
{
}(
{
})
2
1 - exp{-a1T}
gΔF0
τ
tкас - tp
T
×
-
exp
-
1 - exp
-
a1
G
1-a1τ
τ
τ
Решение уравнения (4) находится методом последовательных приближе-
ний:
T = lim
Tn, Tn = ψ(Tn-1), n = 1,2,... ,
n→∞
где T0 — начальное приближение. Скорость самолета vсх в момент схода с
палубы определяется по формуле
vсх = vкас + Δv(tкас + T),
где Δv(tкас + T ) есть значение функции Δv(t) при t = tкас + T . При проведе-
нии численных расчетов использовались характеристики корабля, соответ-
ствующие авианесущему крейсеру “Адмирал Кузнецов”. Результаты числен-
ных расчетов скорости vсх в зависимости от момента tp дачи тяги для трех
рассматриваемых значений приемистости двигателя τ (τ = 1 c, τ = 1,5 c и
τ = 2 c) представлены в Приложении в табл. 4.
133
6. Максимальная просадка траектории самолета
после схода с палубы
После схода с палубы движение самолета рассматривается в детерминиро-
ванной постановке и описывается системой (2) со следующими начальными
условиями:
(5)
v = vсх, α = 0, ϑ = 0, ωz = 0, y = 0, x = sag
+ NK,
где NK — длина участка палубы от точки N до точки K (см. рис. 3). Откло-
нение δ органа продольного управления предполагается постоянным и опре-
деляется из условия балансировки
mz0 + mαzα + mδzδ = 0
при α = αбал = 15◦.
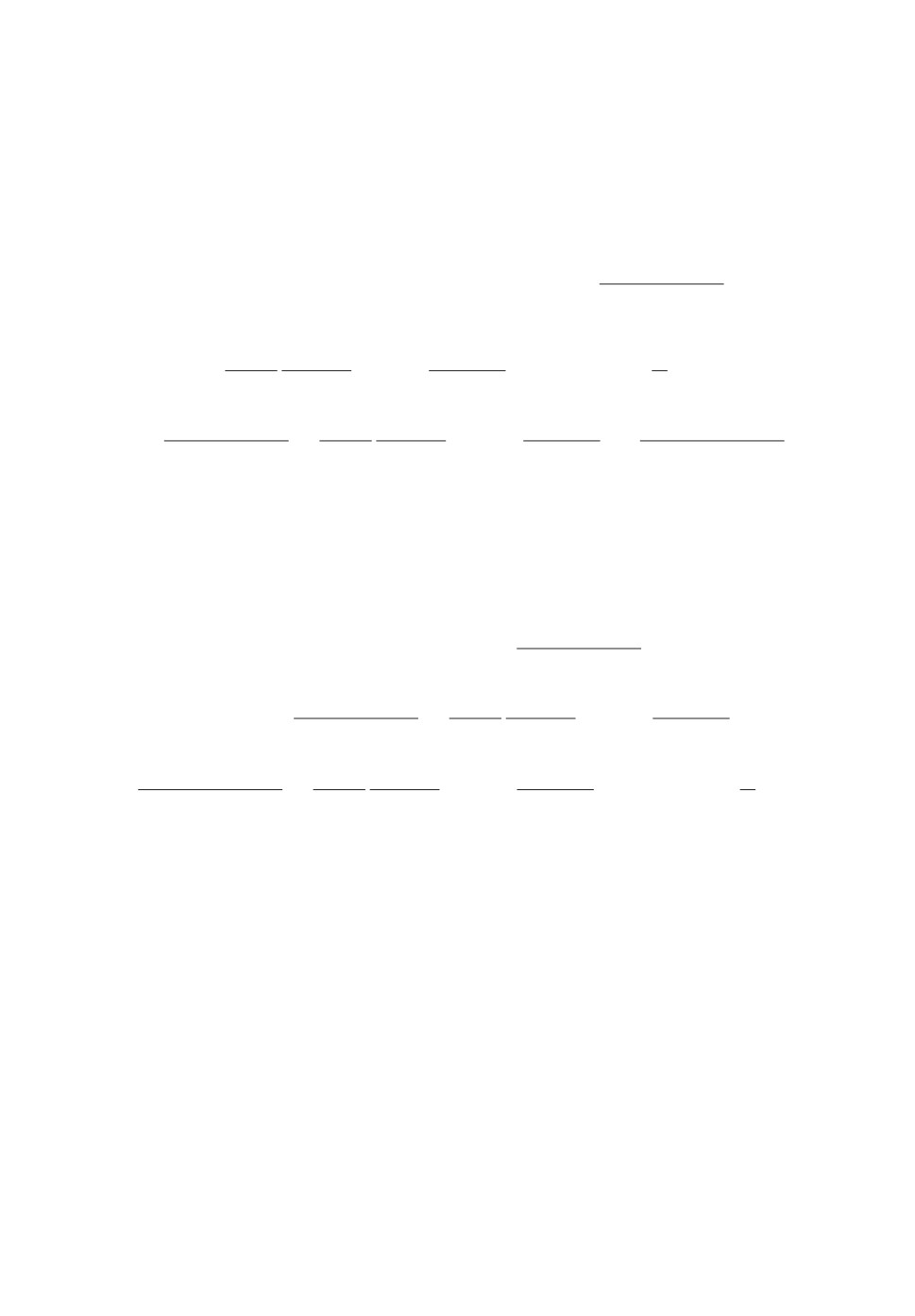
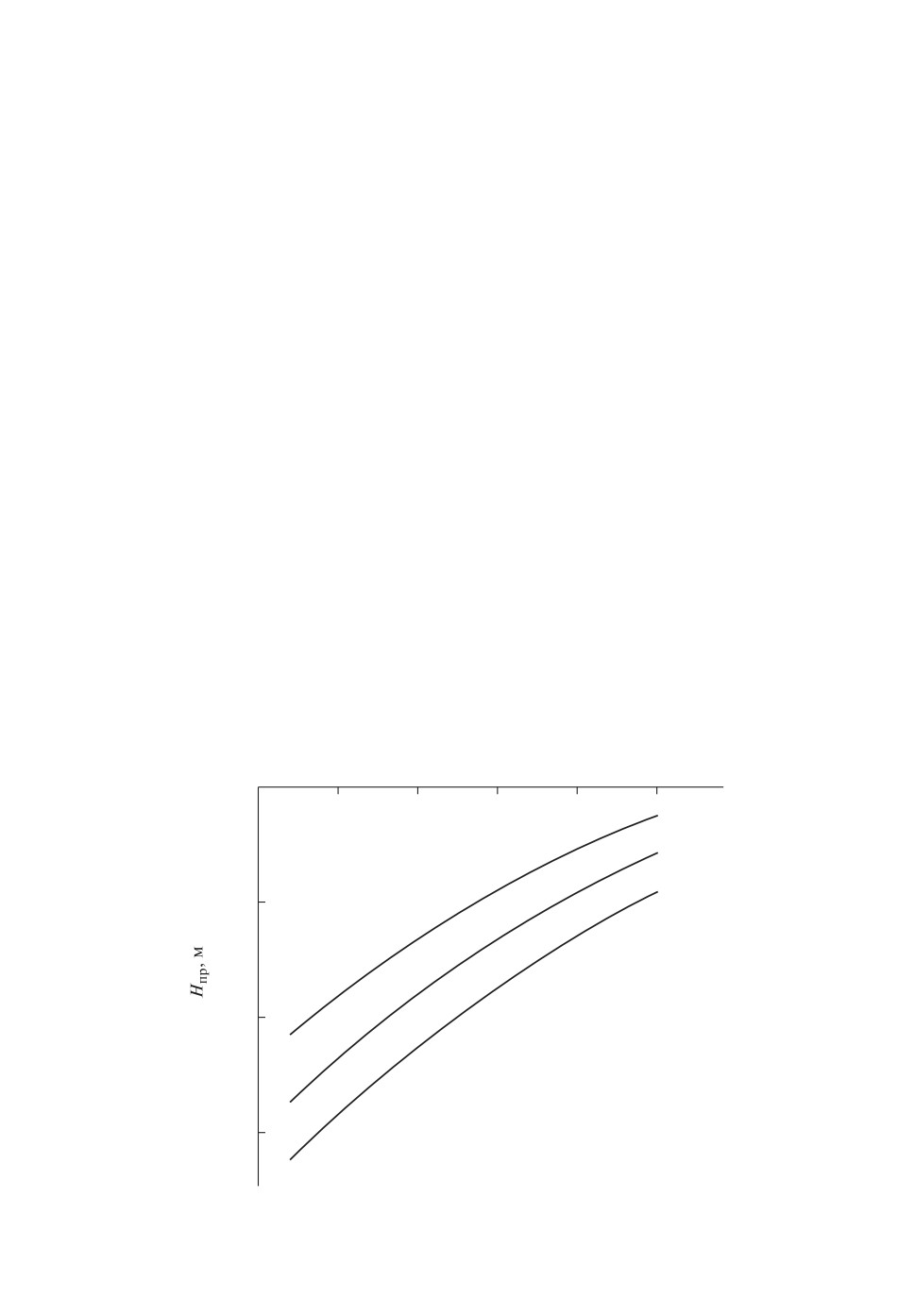
Максимальная просадка |Hпр| (см. рис. 1) определяется по минимальной
координате y в результате численного интегрирования системы (2) с началь-
ными условиями (5). Полученные результаты для просадки Hпр представле-
ны на рис. 5. Как и на рис. 2, по горизонтальной оси отложен промежуток вре-
мени Δt = tland - tp, определяющий момент дачи тяги tp и представляющий
собой время от момента tp до предполагаемого (математического ожидания)
момента tland касания палубы в случае, если бы увеличения тяги не произо-
шло. Численные значения просадки Hпр, по которым построены графики на
рис. 5, вынесены в Приложение и представлены в табл. 2.
0
0,5
1,0
1,5
2,0
2,5
t, c
–1,0
= 1,0 c
= 1,5 c
-1,5
= 2,0 c
–2,0
-2,5
Рис. 5.
134
7. Определение допустимых моментов дачи тяги
При выборе допустимых моментов дачи тяги принято рассматривать огра-
ничение не на вероятность Pнз незацепления аэрофинишера после одного за-
хода на посадку, а ограничение на вероятность Pаб посадки на аварийный
барьер. Вероятность Pаб принимают равной вероятности незацепления после
n заходов, т.е. Pаб = Pnнз. При этом из условия ограниченности запаса топлива
допустимое число повторений захода на посадку обычно принимают равным
n = 3, так что Pаб = P3нз.
При посадке на аварийный барьер самолет может получить серьезные
повреждения. Требуют, чтобы Pаб < 10-4 [1], что равносильно неравенству
Pнз < 0,0464. С учетом результатов, полученных выше для Pнз, это приводит
к следующим ограничениям на время Δt, определяющее момент увеличения
тяги двигателя:
⎧
⎨1,40 с при τ = 1 с,
Δt < Δtmax, где Δtmax =
1,65 с при τ = 1,5 с,
⎩
1,85 с при τ = 2 с,
т.е. при постоянной двигателя τ = 1 c увеличение тяги должно происходить
не ранее, чем за 1,40 с до предполагаемого момента касания палубы; при
τ = 1,5 с — не ранее, чем за 1,65 с; при τ = 2 с — не ранее, чем за 1,85 с.
Посмотрим теперь, какие требования на Δt налагает условие ограниченно-
сти максимальной просадки самолета после схода с палубы. Просадка опреде-
лялась выше при нулевой бальности волнения моря, т.е. без качки. Понятно,
что при наличии качки максимальная просадка заметно увеличится за счет
сходов с палубы с отрицательными углами θ. Тем не менее просадку нормиру-
ют и при отсутствии качки, предполагая при этом ее соответствующее увели-
чение при появлении качки. Так, например, в [1] указано, что в соответствии с
нормами для палубных самолетов и авианосцев США максимальная просад-
ка при отсутствии качки должна удовлетворять условию Hпр > -3 м. Если
следовать этому критерию, то при использованных в рассмотренном приме-
ре численных значениях параметров задачи, характеризующих выбранные
самолет и корабль, получается, что дачу тяги можно не делать вплоть до
момента касания палубы и единственным ограничением на момент дачи тяги
является условие Δt < Δtmax. Однако когда требуется удовлетворить более
жесткому условию на Hпр, например Hпр > -2 м (это условие, помимо про-
чего, определяется высотой палубы корабля над водной поверхностью), то
получаем уже двустороннее ограничение на Δt:
⎧
⎨
0,30 с при τ = 1 с,
Δtmin < Δt < Δtmax, где Δtmin =
0,75 с при τ = 1,5 с,
⎩
1,20 с при τ = 2 с,
135
т.е. при постоянной двигателя τ = 1 c увеличение тяги должно происходить
не раньше, чем за 1,40 с, но не позже, чем за 0,30 с до предполагаемого
момента касания палубы; при τ = 1, 5 с — не раньше, чем за 1,65 с, но не
позже, чем за 0,75 с; при τ = 2 с — не раньше, чем за 1,85 с, но не позже,
чем за 1,20 с.
8. Заключение
Предложен алгоритм нахождения диапазона допустимых моментов увели-
чения тяги двигателя при посадке самолета на корабль. При существенном
использовании результатов ранее опубликованных работ авторов предложе-
на схема вычисления вероятности Pнз незацепления аэрофинишера и — при
незацеплении аэрофинишера — максимальной просадки Hпр траектории са-
молета после схода с палубы. Вероятность Pнз и просадка Hпр вычисляются
как функции от момента увеличения тяги двигателя, что позволяет, опира-
ясь на существующие общепринятые ограничения на Pнз и Hпр, определить
диапазон возможных моментов увеличения тяги. Предложенная схема проил-
люстрирована численными расчетами, проведенными для реальных самоле-
та и корабля, идентичных корабельному самолету МиГ-29К и авианесущему
крейсеру “Адмирал Кузнецов”.
ПРИЛОЖЕНИЕ
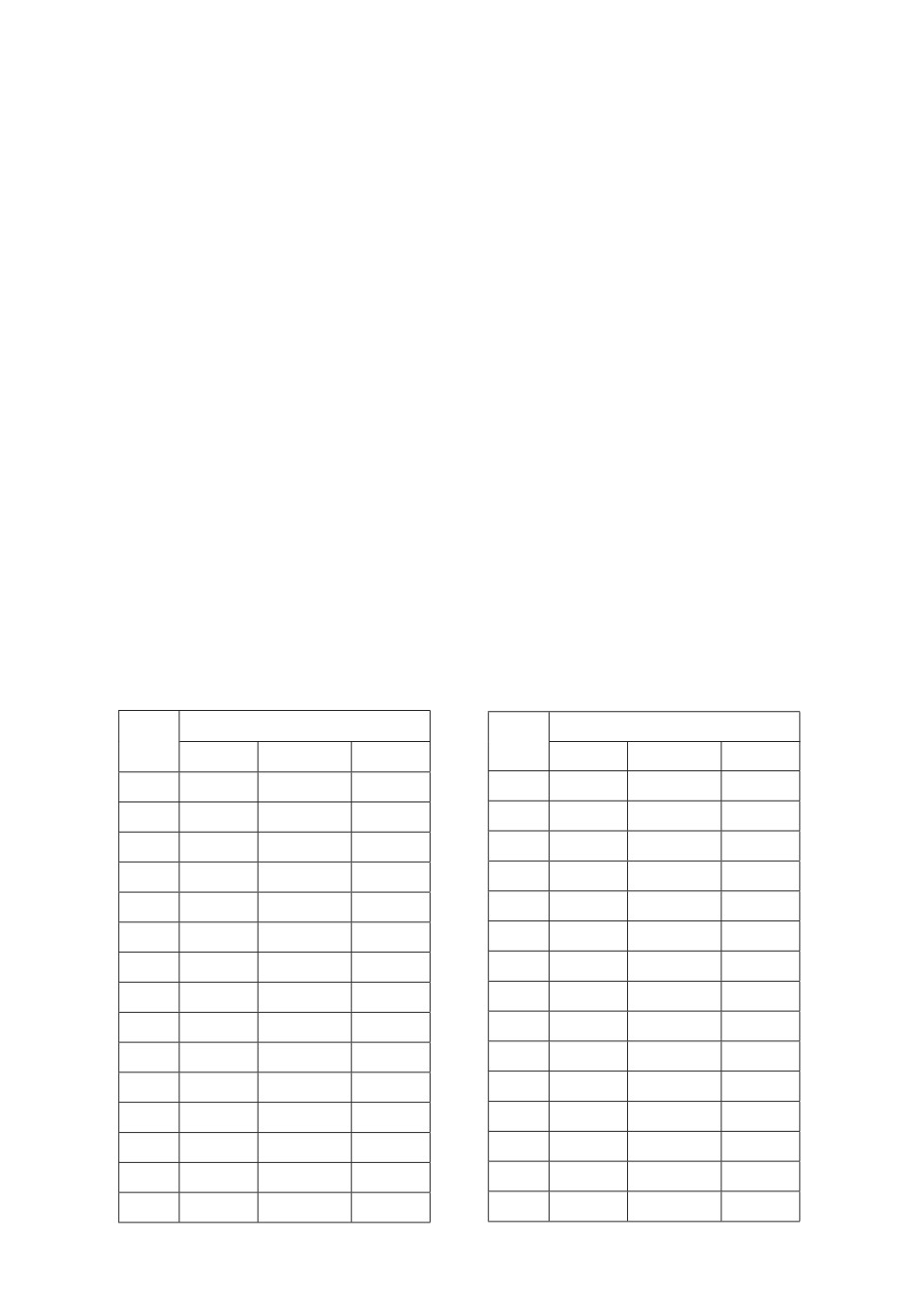
Таблица 1
Таблица 2
Pнз
Hпр, м
Δt, c
Δt, c
τ = 1 c τ = 1,5 c τ = 2 c
τ =1c
τ = 1,5 c τ = 2 c
0,2
0,0081
0,0079
0,0078
0,2
-2,052
-2,334
-2,590
0,3
0,0086
0,0082
0,0079
0,3
-1,993
-2,270
-2,523
0,4
0,0090
0,0085
0,0081
0,4
-1,937
-2,208
-2,458
0,5
0,0096
0,0088
0,0083
0,5
-1,881
-2,147
-2,394
1,0
0,0172
0,0129
0,0108
1,0
-1,633
-1,871
-2,099
1,5
0,0545
0,0302
0,0206
1,5
-1,425
-1,635
-2,844
1,7
0,1003
0,0498
0,0307
1,7
-1,352
-1,552
-1,752
1,8
0,1385
0,0658
0,0389
1,8
-1,317
-1,512
-1,708
1,9
0,1917
0,0885
0,0501
1,9
-1,284
-1,473
-1,666
2,0
0,2635
0,1202
0,0658
2,0
-1,251
-1,436
-1,625
2,1
0,3562
0,1642
0,0876
2,1
-1,220
-1,400
-1,585
2,2
0,4689
0,2237
0,1178
2,2
-1,190
-1,365
-1,546
2,3
0,5945
0,3015
0,1592
2,3
-1,161
-1,332
-1,509
2,4
0,7205
0,3987
0,2148
2,4
-1,133
-1,299
-1,472
2,5
0,8312
0,5123
0,2873
2,5
-1,106
-1,268
-1,437
136
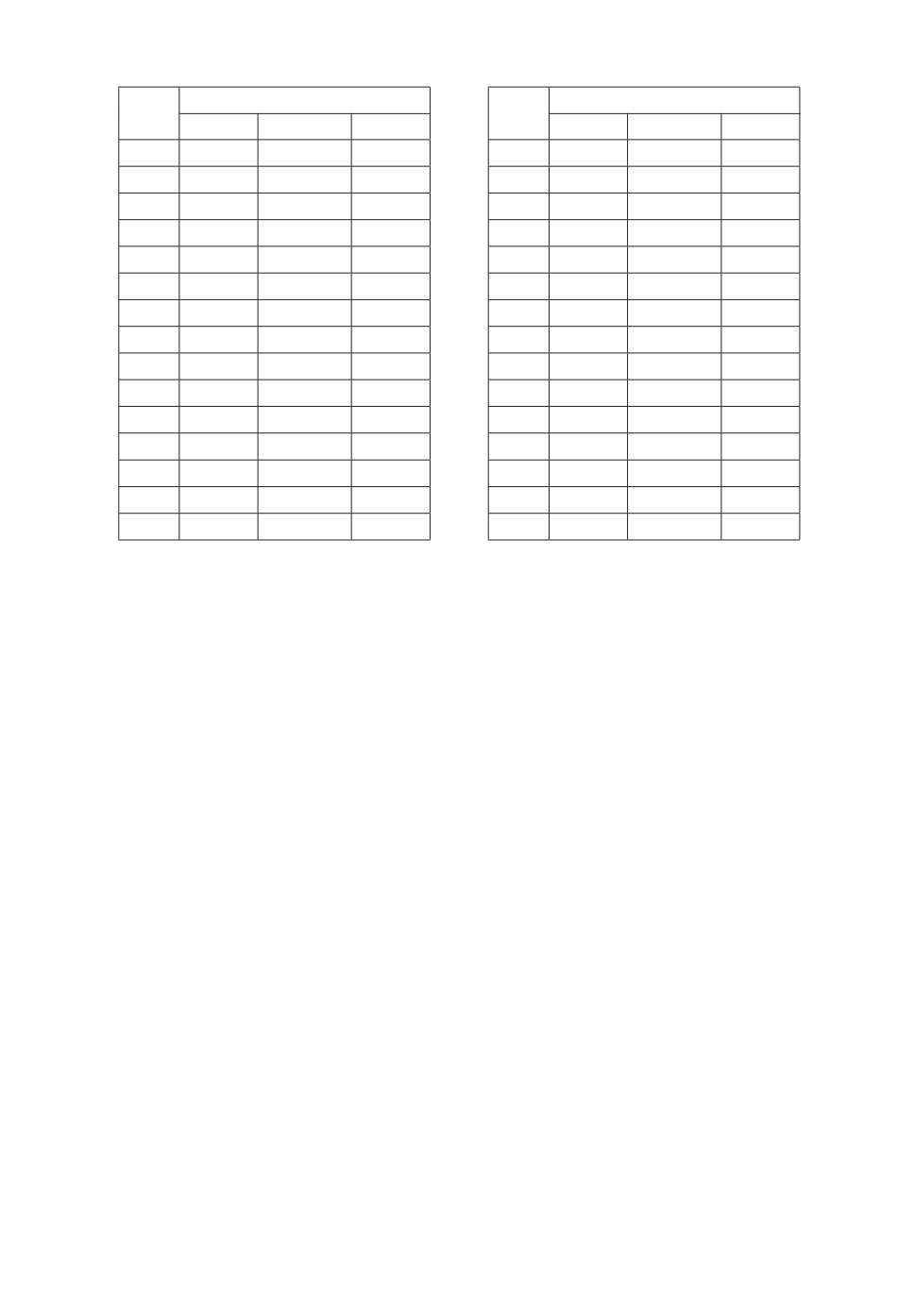
Таблица 3
Таблица 4
vкас, м/с
vсх, м/с
Δt, c
Δt, c
τ = 1 c τ = 1,5 c τ = 2 c
τ = 1 c τ = 1,5 c τ = 2 c
0,2
67,210
67,039
66,944
0,2
76,941
75,952
75,208
0,3
67,389
67,174
67,053
0,3
77,198
76,192
75,430
0,4
67,591
67,322
67,173
0,4
77,453
76,433
75,652
0,5
67,786
67,482
67,304
0,5
77,705
76,674
75,876
1,0
68,930
68,407
68,079
1,0
78,929
77,859
76,991
1,5
70,166
69,464
68,991
1,5
80,077
78,997
78,084
1,7
70,664
69,904
69,380
1,7
80,153
79,436
78,511
1,8
70,912
70,125
69,577
1,8
80,727
79,651
78,722
1,9
71,157
70,348
69,776
1,9
80,935
79,865
78,931
2,0
71,402
70,570
69,976
2,0
81,142
80,075
79,137
2,1
71,644
70,793
70,177
2,1
81,345
80,283
79,342
2,2
71,883
71,014
70,379
2,2
81,543
80,487
79,545
2,3
72,120
71,235
70,581
2,3
81,739
80,689
79,746
2,4
72,354
71,455
70,783
2,4
81,931
80,888
79,944
2,5
72,585
71,674
70,985
2,5
82,120
81,084
80,140
СПИСОК ЛИТЕРАТУРЫ
1.
Деккер Р.М. Испытания по определению годности палубных самолетов к
взлетно-посадочным операциям при базировании на авианосце / Технический
перевод ЦАГИ № 12242, 1973.
2.
Семаков С.Л. Выбросы случайных процессов: приложения в авиации. М.: Наука,
2005.
3.
Rife J., Khanafseh S., Pullen S. et. al. Navigation, interference suppression, and
fault monitoring in the sea-based joint precision approach and landing system //
Proc. of the IEEE. 2008. V. 96. No. 12. P. 1958-1975.
4.
Isaacs J.T., Ezal K.O., Hespanha J.P. Local carrier-based precision approach and
landing system // Proc. 2016 IEEE 55th Conference on Decision and Control (CDC-
2016), Las Vegas, USA, 2016. P. 6284-6290.
5.
Semakov S.L., Semakov I.S. Estimating the probability of safe landing for aircrafts //
Proc. 2019 IEEE 58th Conference on Decision and Control (CDC-2019), Nice, France,
2019. P. 2568-2573.
6.
Hess R.A. Analysis of the aircraft carrier landing task, pilot + augmentation/
automation // IFAC-PapersOnLine. 2019. V.
51. No.
34
(special issue: 2nd
IFAC Conference on Cyber-Physical and Human Systems CPHS, Miami, USA,
13-15 December, 2018). P. 359-365.
7.
Sidar M., Doolin B. On the feasibility of real-time prediction of aircraft carrier motion
at sea // IEEE Trans. Autom. Control. 1983. V. 28. No. 3. P. 350-356.
8.
Бем Л.А., Гуров В.Ф., Кабачинский В.В. и др. Летно-моделирующий комплекс
исследования посадочных систем летательных аппаратов корабельного базиро-
вания // Патент № RU2042583C1, 1991.
137
9. Semakov S.L. Crossings problems in random processes theory and their applications
in aviation. Newcastle, UK: Cambridge Scholars Publishing, 2019.
10. Semakov S.L. Aircraft landing strategy // Proc. 2021 IEEE 7th International Con-
ference on Control, Automation and Robotics (ICCAR-2021), Singapore, Singapore,
2021. P. 184-188.
11. Barratt S.T., Kochenderfe M.J., Boyd S.P. Learning probabilistic trajectory models
of aircraft in terminal airspace from position data // IEEE Trans. Intell. Transp.
Syst. 2019. V. 20. No. 9. P. 3536-3545.
12. Zhen Z., Yu C., Jiang S., Jiang J. Adaptive super-twisting control for automatic
carrier landing of aircraft // IEEE Trans. Aerosp. Electron. Syst. 2020. V. 56. No. 2.
P. 984-997.
13. Semakov S.L., Semakov I.S.Method of calculating the probability of a safe landing
for ship-based aircraft // IEEE Trans. Aerosp. Electron. Syst. 2022. V. 58. No. 6.
P. 5425-5442.
14. Семаков С.Л. Первое достижение границ случайным процессом // АиТ. 1988.
№ 6. С. 87-95.
15. Семаков С.Л. Вероятность первого достижения уровня компонентом многомер-
ного процесса на заданном промежутке с соблюдением ограничений на его дру-
гие компоненты // Теория вероятн. и ее примен. 1989. Т. 34. № 2. С. 402-406.
16. Semakov S.L., Semakov I.S. Estimating the probability that a random process first
reaches the boundary of a region on a given time interval // Proc. 2018 IEEE
57th Conference on Decision and Control (CDC-2018), Miami Beach, USA, 2018.
P. 256-261.
Статья представлена к публикации членом редколлегии А.А. Галяевым.
Поступила в редакцию 23.01.2022
После доработки 27.05.2022
Принята к публикации 28.07.2022
138