Автоматика и телемеханика, № 4, 2023
Управление в технических системах
© 2023 г. С.М. КОВАЛЁВ, д-р техн. наук (ksm@rfniias.ru),
А.В. СУХАНОВ, канд. техн. наук (a.suhanov@rfniias.ru),
И.А. ОЛЬГЕЙЗЕР, канд. техн. наук (iohan@rfniias.ru)
(Ростовский филиал АО «НИИАС»;
Ростовский государственный университет путей сообщения),
К.И. КОРНИЕНКО, канд. техн. наук (k.kornienko@vniias.ru)
(Ростовский филиал АО «НИИАС»;
Петербургский государственный университет
путей сообщения Императора Александра I)
ИДЕНТИФИКАЦИЯ КРИТИЧЕСКИХ СОСТОЯНИЙ
ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ НА ОСНОВЕ
МЕТОДОВ ПРЕДИКТИВНОЙ АНАЛИТИКИ
В статье предлагается предиктивный подход к оценке особых классов
опасных состояний в развитии технологических процессов с целью приня-
тия упреждающих решений. В основе разрабатываемого подхода лежит
гибридная модель, основанная на объединении доказательного классифи-
катора, нечеткой логики и вероятностной схемы комбинирования свиде-
тельств Демпстера-Шафера. В статье представлено формальное описа-
ние предиктора критических состояний технологического процесса. Полу-
ченный подход универсален и применим при автоматизации любых слож-
ных технических систем. В качестве примера в данной статье было рас-
смотрено применение разработанного подхода для решения задачи оцен-
ки безопасности технологического процесса расформирования составов
на сортировочной горке. Представленный пример показывает высокую
эффективность и практическую полезность разработанного подхода.
Ключевые слова: сложная технологическая ситуация, предиктивная ана-
литика, сортировочная горка, нечеткая логика, доказательный классифи-
катор.
DOI: 10.31857/S0005231023040074, EDN: QIGFPH
1. Введение
Оценка состояния сложных технических систем (СТС) не теряет актуаль-
ности уже многие годы [1, 2]. Рост степени сложности СТС требует развития
известных и разработки новых методов обеспечения надежности СТС [3].
Так как сложные системы характеризуются нелинейностью, большим объ-
емом элементов, стохастичностью, слабой структурированностью формали-
зации и др. [4], их работу невозможно смоделировать жесткими алгоритмами,
115
широко применяемыми для выявления закономерностей в доступных наблю-
дению реализациях случайного процесса, сопровождающего анализируемую
систему, с целью мониторинга и управления [1]. Наиболее сложной является
задача прогнозирования целевых (имеющих интерес в конкретной области)
ситуаций, нежели изменений контролируемых параметров. Целевыми могут
быть ситуации достижения некоторого эффекта, профита или обратные им —
опасные (нештатные, критические) ситуации.
В настоящей статье рассматривается задача оценки появления целевых
критических ситуаций, среди которых сбои, отказы и крушения СТС. Реше-
ние этой задачи является первоочередным при выполнении возрастающих с
каждым годом требований безопасности, предъявляемых при автоматизации
СТС [5], так как благодаря своевременному обнаружению критических си-
туаций создается возможность сохранения работоспособного состояния СТС
и устранения причин их появления.
Для решения поставленной задачи предлагается новый подход к иден-
тификации критических состояний технологических процессов (ТП), сопро-
вождающих поведение СТС. Подход основан на гибридной модели, объеди-
няющей вероятностную модель доказательного классификатора и логико-
лингвистическую модель в виде нечетких продукционных правил.
В последующих главах описана формальная постановка задачи идентифи-
кации критических состояний технологических процессов, представлено опи-
сание разработанного подхода и рассмотрен конкретный пример приложения
предлагаемых решений для обеспечения безопасности движения вагонов на
сортировочной железнодорожной станции.
2. Постановка задачи
Основная задача предиктивного анализа ТП — получение знаний о со-
стояниях ТП и его поведении в виде описаний, согласованных со знаниями
специалистов-экспертов. В настоящей статье речь пойдет о разработке нового
класса предиктивных моделей, предназначенных для анализа ТП, с целью их
использования для прогнозирования критических состояний или нештатных
технологических ситуаций, возникающих в процессе развития ТП.
Под нештатной технологической ситуацией(НТС) понимается ситуа-
ция, связанная с появлением сбоев или существенных отклонений в развитии
ТП и требующая принятия корректирующих решений по нормализации ТП.
В основу разрабатываемого предиктивного подхода к анализу ТП положе-
на идея обнаружения в контролируемом процессе особых типов событий-
предвестников НТС, представленных соответствующими описаниями в мо-
дели ТП.
В качестве модели ТП выступает многомерный временной ряд (МВР):
S = (x1,x2,...,xT)
116
характеризующий изменение ключевых параметров ТП, представленных
множеством векторно-числовых значений xt ∈ RL (t = 1, . . . , T ) на времен-
ном отрезке [1, T ]. Временной ряд значений {xit ∈ R|t = 1, . . . , T } для i-го
параметра в МВР образуют i-е измерение или i-ю компоненту МВР.
События-предвестники НТС образуют особый класс предикторных собы-
тий в развитии ТП.
На содержательном, неформальном уровне задача заключается в разра-
ботке подхода к обнаружению во временном ряду числовых данных, опи-
сывающих поведение технологического процесса, предикторных событий-
паттернов, являющихся предвестниками нештатных технологических ситуа-
ций в контролируемом процессе.
Уточним условия задачи. Прежде всего отметим, что существует доста-
точно большое число эмпирически подтвержденных фактов существования
предикторных событий в областях экологического мониторинга, адаптивного
управления, диагностирования состояний технологических и производствен-
ных процессов и др. [1, 6-8]. Анализ особенностей поведения МВР в преддве-
рии НТС показал, что описание предикторных событий и их связь с НТС
имеет слабо формализованный характер и может быть представлена экспер-
тами в виде лингвистических описаний [7]. В частности, установлено, что в
преддверии бифуркаций в нелинейных динамических системах наблюдается
возникновение особого характера параметрических колебаний эволюциони-
рующей модели, что является ключевым признаком ее перехода в новое, в том
числе и критическое состояние, к которым относится НТС [8]. В рассматри-
ваемой авторами предметной области железнодорожных перевозок специали-
стами также выявлены факты существования причинной связи между НТС
и предикторными событиями, которые могут быть также представлены экс-
пертами в виде нечетко-лингвистических описаний [7]. Другая особенность
идентификации предикторных событий — необходимость использования эво-
люционирующих адаптивных моделей для порождения моделирующего МВР,
поскольку адаптация модели в ходе развития ТП позволяет выявлять особен-
ности ее поведения в преддверии НТС.
Таким образом, с учетом сказанного можно сформулировать ряд ограниче-
ний, накладываемых на разрабатываемую предикторную модель. Во-первых,
нечеткость описания предикторных событий и нечетко-определенный харак-
тер их связи с НТС обусловливают необходимость использования класса
нечетко-логических моделей, способных оперировать нечеткими и лингви-
стическими описаниями при обработке МВР. Во-вторых, нечеткая модель
должна быть адаптируемой к поступающим на ее вход данным с целью по-
рождения динамики моделируемого ТП и выявления предикторных паттер-
нов. И, в-третьих, предикторная модель должна включать стохастический
компонент для получения вероятностных оценок обнаружения предикторных
событий. Исходя из сказанного, решаемая задача сводится к:
117
Разработке гибридной логико-лингвистической модели, включающей
нечетко-логический и вероятностный компонент, способной для заданного
класса ТП, представленных в виде МВР S, и класса НТС, представленных
в виде лингвистических описаний или целевых значений признаков xt ∈ RL,
идентифицировать в S предикторные события с известной степенью веро-
ятности.
В приведенной формулировке ряд моментов нуждаются в дальнейшем
уточнении, которые будут даны в последующих разделах.
3. Общий подход к предиктивному анализу
технологического процесса
В основу разрабатываемого предиктивного подхода к анализу ТП поло-
жена идея обнаружения в контролируемом процессе особых типов предик-
торных событий, предшествующих появлению НТС и представленных соот-
ветствующими описаниями в модели ТП. В качестве модели ТП выступает
многомерный временной ряд, характеризующий изменение ключевых пара-
метров ТП во времени.
При разработке предиктивной модели авторы исходят из базового пред-
положения о наличии прямой зависимости между вероятностями появле-
ния НТС и оценками сложности технологических ситуаций, обусловливаю-
щих данные состояния. Такое предположение основано на мнении экспертов-
технологов о том, что в более сложной ситуации сложнее выбрать эффек-
тивное решение, а значит, возрастает вероятность принятия неэффективных
или даже ошибочных решений, приводящих впоследствии к существенным
нарушениям в развитии технологического процесса и НТС.
Зависимость критических состояний ТП от сложности ТС позволяет по-
дойти к оценке и прогнозированию состояний контролируемого процесса че-
рез оценивание сложности соответствующих ТС. Для реализации такого под-
хода необходимо располагать способом оценки сложности ТС на основе ана-
лиза особенностей их представления в МВР.
Поскольку понятие “сложность”, как одно из свойств анализируемого
объекта, является слабоформализуемым, для его представления авторы ис-
пользуют гибридную модель, объединяющую доказательный классификатор,
предназначенный для получения вероятностных оценок гипотез состояния, и
системы нечетких правил, предназначенных для оценки параметров веро-
ятностных уравнений в доказательных классификаторах на основе анализа
лингвистических значений признаков в описании ТС. Такую модель можно
именовать классификационной логико-лингвистической моделью (КЛМ).
Основу КЛМ составляют доказательный классификатор [9], базирующий-
ся на объединении модели лог-регрессии [10] и общей схемы комбинирования
свидетельств Демпстера-Шафера [11].
118
4. Модель доказательного классификатора
В основе доказательного классификатора лежит классификационная мо-
дель на базе логистической регрессии (лог-модель). Лог-модель предна-
значена для решения задач классификации I -мерных векторов-признаков
x = (x1,...,xI) по K классам Q = {q1,...,qK} на основе анализа уравнений
линейной регрессии (лог-регрессионных уравнений) wk = αkx + βk, сопостав-
ленных классам qk ∈ Q и переменным x. Для случая двух классов Q = {q1, q2}
имеет место бинарная модель логистической регрессии. Вероятности гипотез
классовой принадлежности на основе лог-модели определяются через аффин-
ные функции от x с использованием выражения:
(
)
exp
αTx+βk
k
Pk
(x) =
)
∑ exp(αTl + βl
l=1
Классификатор на основе лог-модели является адаптивной моделью, па-
раметры которой определяются на основе обучения с использованием экс-
периментальных данных. Для заданного обучающего множества примеров
{(xtqt)}nt=1 параметры αk и βk оцениваются путем максимизации критерия
условного логарифмического правдоподобия:
∑[
(
)
]
(1)
δkq(x
lnPk (xt) +
1-δk
ln (1 - Pk (xt))
,
i
)
q(xt)
t=1 k=1
где q(xt) — номер класса принадлежности для xt; δkq(xt)—символКронекера.
Модель доказательного классификатора основана на объединении выше
рассмотренной классической лог-модели и методологии комбинирования сви-
детельств Демпстера-Шафера (DS-правила/схемы). В данной модели пред-
полагается, что входящие в вектор x числовые признаки xi ∈ x выступа-
ют в качестве независимых свидетельств в пользу той или иной гипоте-
зы классовой принадлежности qk ∈ Q. Поэтому, в отличие от классической
лог-модели, в доказательном классификаторе уравнение линейной регрессии
wik = βikxi + β0k формируется отдельно для каждой переменной-признака
xi ∈ x и класса qk ∈ Q, и характеризует условную вероятность P(qk|xi) (част-
ную вероятность) принадлежности вектора x классу qk при данном значении
признака xi. Частные вероятности вычисляются для каждой переменной xi
и класса qk следующим образом:
1
(2)
P (qk|xi) =
1 + exp-(αkixi + βk)
Вычисленные на основании (1) вероятности интерпретируются в дока-
зательном классификаторе в качестве вероятностных масс mki(xi) гипотез
классовой принадлежности, которые объединяются на основе DS-правила
119
⋃I
RDS комбинирования свидетельств RDS :
mik(xi) -→ m∪k(x). В резуль-
i=1
тате получаются итоговые (безусловные) вероятностные массы mk∪(x) гипо-
тез классовой принадлежности, интерпретируемые в качестве вероятностей
классов P (qk|x). Детально модель доказательного классификатора описана
в [10].
Недостатками классической модели доказательного классификатора явля-
ются ограниченность ее применения для распознавания классов в простран-
стве взаимозависимых признаков и невозможность описывать сложные, вы-
чурные области в признаковом пространстве.
Например, в одной из моделей управления вагонным замедлителем зави-
симость между сложностью ТС и скоростью отцепа Vn описывается линейной
регрессией, а именно, при увеличении скорости Vi сложность ТС возрастает.
Однако на характер этой зависимости влияет не только скорость Vn данного
n-го отцепа, но также и величина Vn-1 скорости следующего за ним отцепа,
которая может изменить эту зависимость на противоположную. А именно,
при малом значении Vn сложность ТС также начнет возрастать, но уже с
уменьшением Vn из-за возможности нагона n-го отцепа следующим за ним
(n - 1)-м отцепом.
Для снятия данных ограничений ниже рассматривается гибридная модель
логико-лингвистического классификатора (КЛМ), свободная от указанных
недостатков.
5. Классификационная логико-лингвистическая модель
Главным компонентом гибридной КЛМ является новый тип нечеткой мо-
дели Такаги-Сугено (TS-модель), включающей продукционные правила вида:
(
)
(
)
Rjik : IF x1 = μj
AND . . . AND IF xI = μj
THEN wjik =αjikxi+βjik,
1
I
где j ∈ [1, J] — номер правила; i ∈ [1, I] — номер переменной; k ∈ [1, K] —
номер класса; μji — функция принадлежности (ФП) нечеткого терма для i-й
переменной в j-м правиле; αjik и βjik — параметры уравнения лог-регрессии.
Формализованным представлением нечеткого правила является выраже-
ние:
⋀
(3)
Rjik :
μji(xi)
⇒ wjik =αjikxi +βjik.
i=1
Степень ассоциации входного вектора x с нечетким правилом определяет-
ся через T-норму [12], которая обычно представляется продукционным опе-
ратором:
(4)
τj (x) = TIp=1μjpk (xp) = μj1k (x1) × ... × μjIk (xI
).
120
В контексте решаемой задачи левые и правые части нечетких правил TS-
модели имеют следующую интерпретацию. Антецеденты нечетких правил
⋀I
Aj =
μji являются лингвистическими описаниями технологических си-
i=1
туаций. Консеквенты нечетких правил представляют собой линейные зави-
симости wjik, имеющие смысл лог-регрессионных уравнений wjik, устанавли-
вающих связь между вероятностными оценками классовой принадлежности
P (qk|xi) и значениями параметра xi ∈ x.
Таким образом, в базе знаний КЛМ каждое j-е нечеткое правило имеет от-
ношение к некоторому j-му сценарию технологической ситуации и характери-
зует связь между ее классовой принадлежностью (вероятностью принадлеж-
ности тому или иному классу) и изменением i-го параметра в данной техноло-
гической ситуации. При этом описание технологической ситуации представ-
лено в антецеденте нечеткого правила Rj в виде конъюнкции ФП нечетких
термов. Активация нечеткого правила Rj осуществляется путем подстанов-
ки в антецедент Aj конкретных значений параметров x∗p ∈ x∗ (p = 1, . . . , I),
характеризующих j-ю ТС. В результате вычисляется степень истинности ан-
(
)
тецедента τj (x) = TIp=1μjpk
x∗p
, которая в рамках КЛМ имеет смысл степени
соответствия вектора x∗ j-й ситуации. База знаний КЛМ образует множе-
ство {Rj} нечетких правил, поэтому каждый входной вектор x∗ активирует
не одно, а одновременно группу нечетких правил {R′j } ⊆ {Rj } с однотипными
антецедентами. Путем объединения этих правил на основе нечеткого выво-
да Такаги-Сугено формируется единая лог-регрессионная зависимость w∪ik,
обобщающая свойства всех частных лог-регрессий wj′ik, являющихся антеце-
дентами нечетких правил группы {R′j }. На основе обобщенной лог-регрессии
w∪ik для каждого конкретного значения параметра x∗i ∈ x вычисляется услов-
ная вероятность классовой принадлежности P (qk|x∗i) при данном значении
параметра x∗i.
Формула нечеткого вывода для обобщенной лог-регрессионной зависимо-
сти w∪ik на основе подмножества нечетких правил {R′j } имеет вид:
|R′j|∑
j
τj (x) · w
ik
j
(5)
w∪ik
=
,
|R′j|∑
τj (x)
j
где τj (x) — степень активации нечеткого правила Rj ∈ {R′j }, вычисляемая
на основании (4); |R′j| — количество нечетких правил в группе {R′j}; wjik —
{
}
частная лог-регрессия в консеквенте нечеткого правила Rj ∈ R′
j
Таким образом, принципиальной особенностью предложенного варианта
нечеткой модели Сугено становится включение в нее двух компонент, неза-
висимо поддерживающих стохастический и нечетко-логический концепты.
Нечетко-логический концепт поддерживается антецедентами нечетких пра-
121
вил, которые на лингвистическом уровне описывают сценарии технологиче-
ских ситуаций, представленные экспертами-технологами, а стохастический
концепт поддерживается консеквентами нечетких правил, представляющими
лог-регрессионные зависимости, на основе которых вычисляются вероятност-
ные оценки гипотез классовой принадлежности. При поступлении на вход
модели вектора параметров технологической ситуации x = (x1, . . . , xI ) на ос-
нове нечеткого вывода формируется обобщенная лог-регрессия w∪ik, являю-
щаяся некой синергетической комбинацией технологически ориентированных
частных лог-регрессий wjik. Формулы (3)-(5) являются базовыми для вы-
числения условных вероятностей классовой принадлежности P (qk|xi). Прин-
ципиально, что полученные оценки вероятностей являются независимыми,
поскольку “порождаются” отличающимися антецедентами нечетких правил.
Это обусловливает возможность корректного применения схемы комбиниро-
вания независимых свидетельств Демпстера-Шафера для объединения част-
ных вероятностей P (qk|xi) в единую оценку вероятности P (qk|x) гипотезы
классовой принадлежности.
6. Пример представления данных на основе КЛМ
Простейшим примером выше описанной модели является следующая
КЛМ, предназначенная для представления на числовой оси X “разорванной”
области одного из двух подлежащих распознаванию классов q1, q2 с исполь-
зованием единственного уравнения лог-регрессии w = αx + β:
• IF x > 0 AND x is Big THEN w = αx + β (Вероятность q1 возрастает с
увеличением X)
• IF x > 0 AND x is Small THEN w = -(αx + β) (Вероятность q1 убывает
с увеличением X)
• IF x < 0 AND |x| is Big THEN w = -(αx + β) (Вероятность q1 возрастает
с увеличением модуля X)
• IF x < 0 AND |x| is Small THEN w = αx + β (Вероятность q1 убывает с
увеличением модуля X)
Формальным представлением КЛМ является следующая система нечетких
правил:
(sgn(x) + 1)
&μBig (x) → w = ax + b
2
(sgn(x) + 1)
&μSm (x) → w = -(ax + b)
2
(-sgn(x) + 1)
&μBigmod (x) → w = (ax + b)
2
(-sgn(x) + 1)
&μSMmod (x) → w = -(ax + b)
2
122
ФП для лингвистических термов определяются через параметры лог-
регрессионного уравнения w = ax + b следующим образом:
2
μBig (x) =
- 1, x ∈ [0, +∞)
1 + exp(-w)
2
μSm (x) = 2 -
,
x ∈ [0,+∞)
1 + exp(-w)
2
μBigmod (x) =
- 1, x ∈ (-∞, 0]
1 + exp(w)
2
μSmmod (x) = 2 -
,
x ∈ (-∞,0]
1 + exp(w)
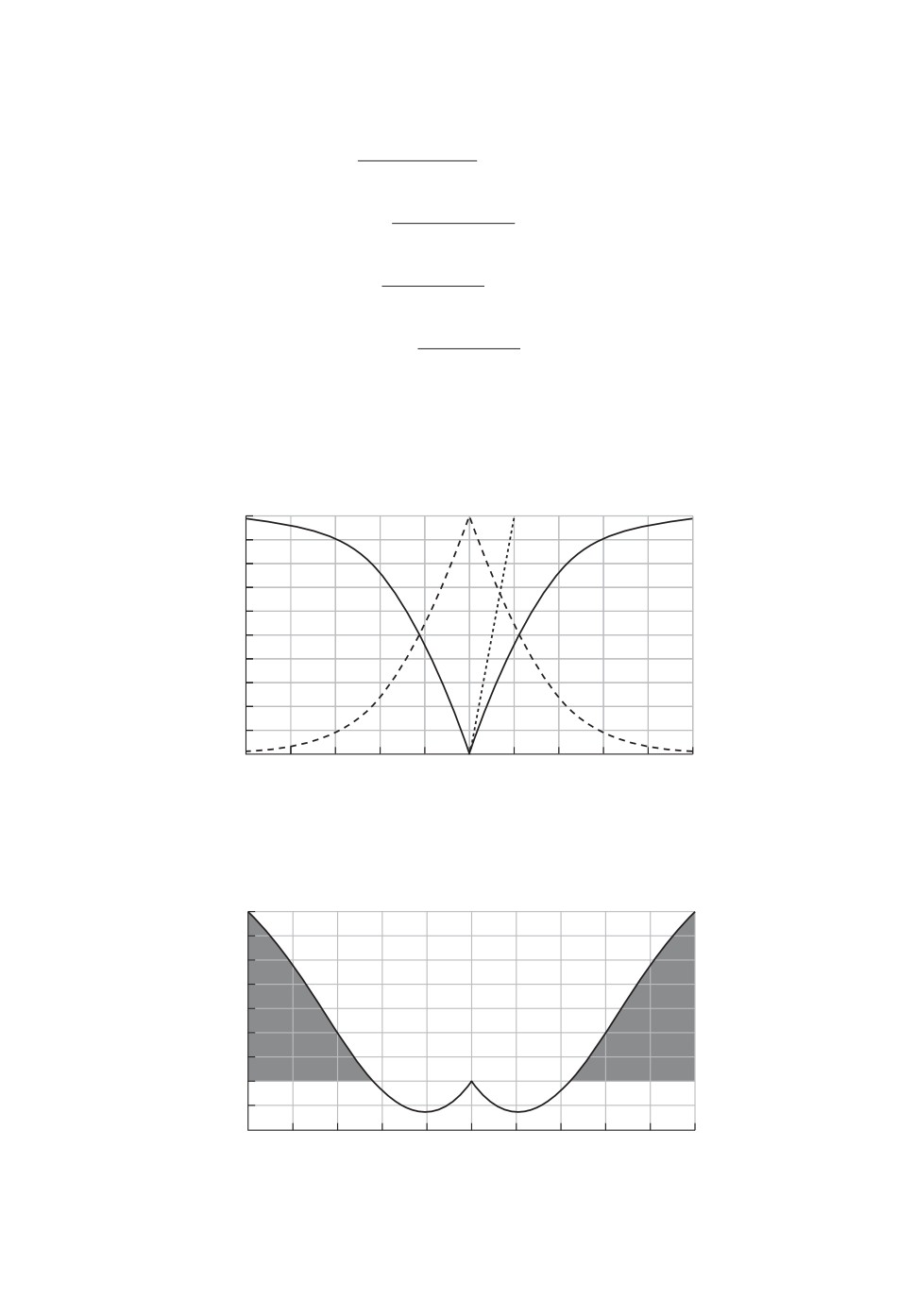
Ниже на рисунках представлены результаты классификации областей в
одномерном пространстве X с использованием КЛМ.
w(x), (x)
1,0
0,9
0,8
Big/
Bigm
od
0,7
0,6
0,5
0,4
0,3
w
Sm/
Smm
od
0,2
0,1
0
-10
-8
–6
-4
-2
0
2
4
6
8
10
x
Рис. 1. Графики функции принадлежности и логистическая регрессия в лог-
модели.
P(q1| x)
0,8
0,7
0,6
0,5
0,4
-5
-4
-3
-2
-1
0
1
2
3
4
5
x
Рис. 2. Представление «разорванной» области для класса q1 (закрашена) на
основе КЛМ.
123
7. Вычислительный эксперимент
Разработанный подход к анализу предикторов сложных технологических
процессов универсален. При этом для обеспечения возможности его функцио-
нирования на реальных данных и внедрения в действующие системы автома-
тизации необходима экспертная группа людей, обладающая опытом работы
в технологическом процессе [13, 14]. В связи с тем, что авторы данной статьи
более 20 лет работают в сфере автоматизации управления железнодорожным
транспортом и обладают возможностью создания такой экспертной группы,
то в статье будет рассмотрен предложенный подход применительно к обеспе-
чению безопасности движения вагонов на сортировочных горках.
Целью стратегии развития железных дорог Российской Федерации и дру-
гих стран является увеличение доли железнодорожного транспорта в общей
структуре грузооборота. Один из способов решения данной задачи — совер-
шенствование планирования и эксплуатации сортировочных станций [15, 16].
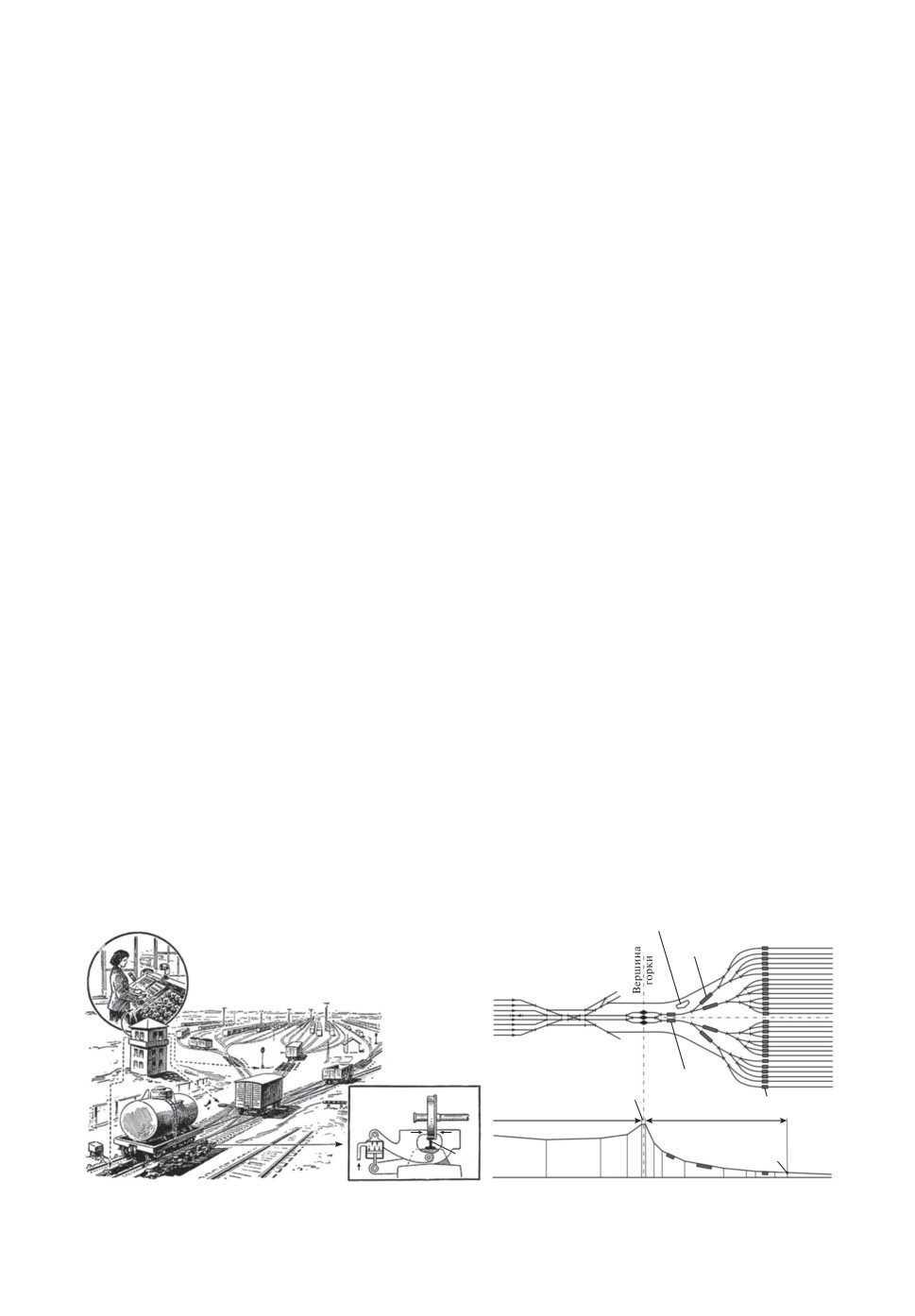
Наиболее важным и сложным узлом сортировочной станции является сор-
тировочная горка, где производится сортировка (расформирование) пришед-
ших на станцию грузовых поездов методом свободного скатывания. В процес-
се сортировки производится надвиг состава на горку, расцепка необходимых
групп вагонов (отцепов) и скатывание их с горки под действием силы тяжести
на заданный путь посредством стрелочных переводов (рис. 3).
Для обеспечения безопасности движения подвижного состава при свобод-
ном скатывании необходимы постоянный контроль и регулировка скорости
свободного скатывания групп вагонов (отцепов). Стоит отметить, что регули-
ровка скорости движения отцепа возможна только на специальных участках,
называемых тормозными позициями [5].
Опасной (или нештатной) ситуацией принято считать объединение (со-
ударение) вагонов на спускной части. При этом соударение может произойти
по различным причинам — неперевод стрелки (например, одновременное на-
хождение более одного отцепа ведет к запрету перевода стрелки, что в свою
очередь приводит к соударению), превышение усилия торможения в вагонном
Горочный пост
Парк
2-я тормозная
сортировки
позиция
Парк
приема
1-я тормозная
Перевальная
позиция
Схема
часть
торможения
3-я тормозная
вагона
Надвижная часть
Спускная часть
позиция
замедлителем
Расчетная
Рельс
точка
Воздух
Рис. 3. Иллюстрация работы сортировочной горки.
124
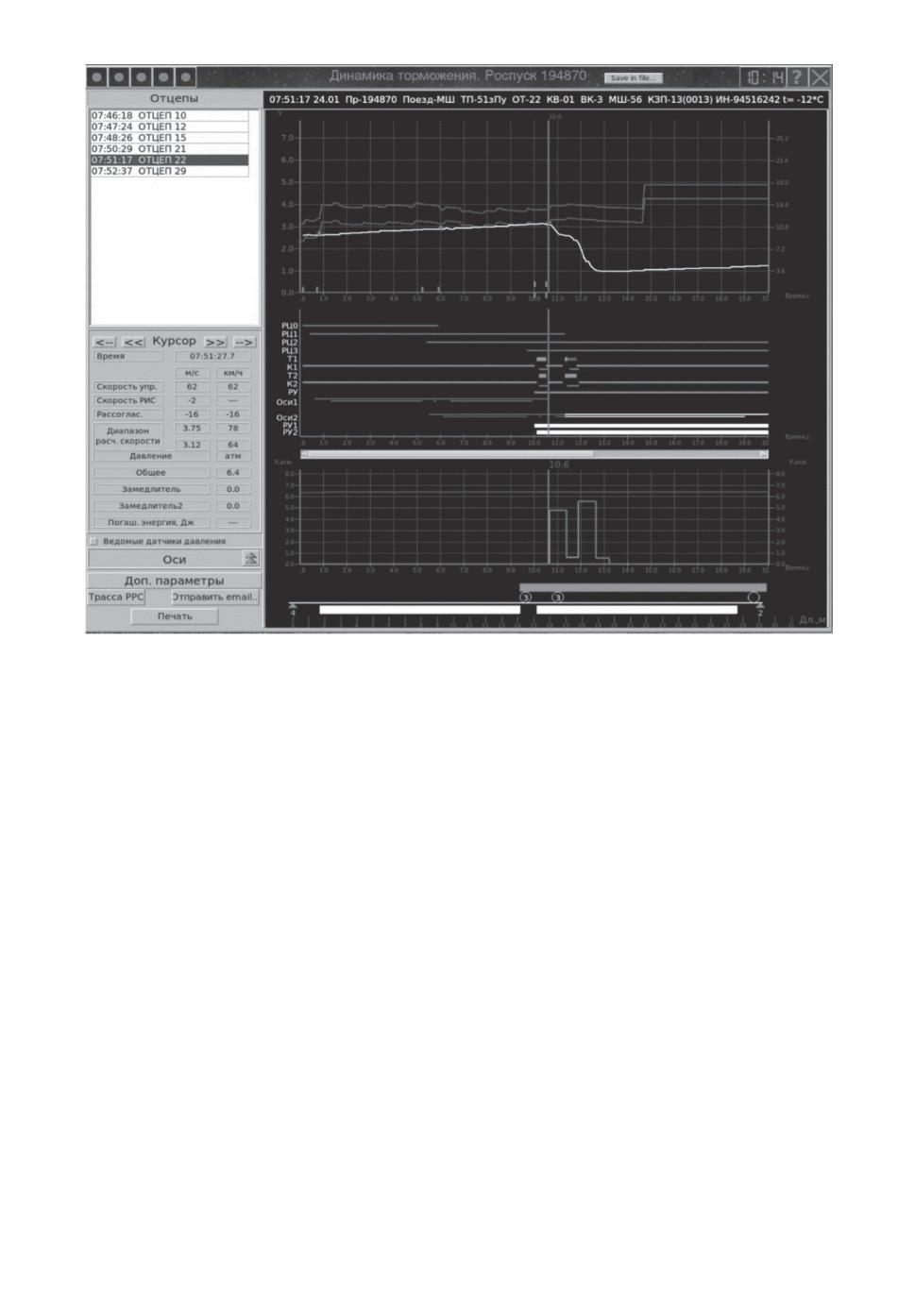
Рис. 4. Пример ручного вмешательства.
замедлителе (например, из-за неисправности замедлителя), а также при пре-
вышении скорости надвига вагонов на горку. При этом эксперты сходятся во
мнении, что степень опасности соударения на спускной части увеличивается
при одновременном нахождении множества одновагонных отцепов с разными
весовыми категориями [5, 17-19]. Поэтому расчет параметров сортировочной
горки при проектировании новых объектов или при анализе ситуаций нару-
шения безопасности движения производится для наиболее сложного случая,
когда на горке находятся три и более одновагонных отцепа с чередующимися
ходовыми свойствами. Из приведенных причин повышения степени опасности
также следует, что на сложность технологической ситуации влияют расстоя-
ния между отцепами, их скорости и ряд других параметров.
Для оценки классовой принадлежности технологической ситуации исполь-
зовались следующие признаки:
• Ходовые свойства отцепа. Интегральный параметр (от 0 до 1), завися-
щий от частных характеристик вагонов (вес, длина) и параметров окру-
жающей среды (ветер, температура, влажность). Формирование пара-
метра осуществлялось на основе алгоритмов, предложенных в [20].
• Характеристика ускорения скатывания, зависящая от местоположения
отцепа (м/с2);
• Скорость отцепа (м/с);
125
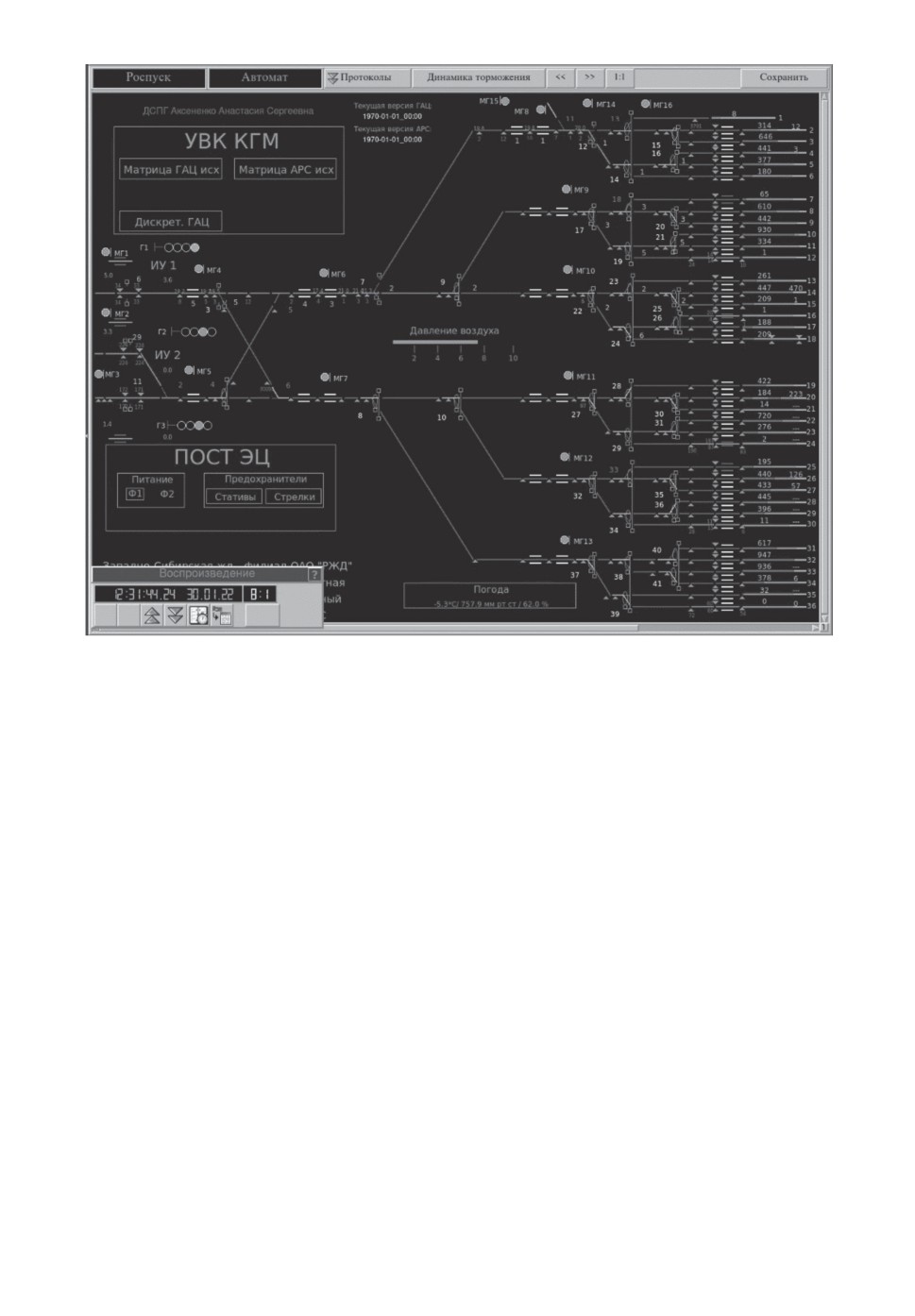
Рис. 5. Пример объединения нескольких отцепов на спускной части сортиро-
вочной горки.
• Расстояние до точки разделения маршрутов отцепов (м) (согласно [21],
объединение вагонов в кривых недопустимо, поэтому, даже если два
отцепа идут на один путь, отцепы должны объединяться только в сор-
тировочном парке).
На этапе обучения КЛМ использовалась база данных из 5000 технологи-
ческих ситуаций, размеченных экспертами по двум классам сложности. Обу-
чающие данные собраны с 20 сортировочных горок, оборудованных комплекс-
ной системой автоматизаций сортировочных процессов (КСАУ СП) [22, 23].
Для оценки точности разработанной модели использовалась тестовая
выборка, содержащая
100
технологических ситуаций, переданных в АО
«НИИАС» от ОАО «РЖД» с целью экспертного анализа. Во всех рассматри-
ваемых случаях имело место ручное вмешательство оператора в ход роспуска.
Результат ручного вмешательства, показанный на экране автоматизиро-
ванного рабочего места электромеханика, приведен на рис. 4.
Серая кривая — допустимая скорость движения отцепа, белая — текущая
скорость отцепа. Слева от синей вертикальной линии управление произво-
дилось автоматической системой. После чего в процесс движения вмешался
оператор, из-за чего скорость движения отцепа значительно упала.
126
Пример нештатной ситуации представлен на рис. 5. В данном примере от-
цепы 2, 3, 4, 5 и 6 объединились на измерительном участке горки и были оши-
бочно направлены на один маршрут. Анализ описанной нештатной ситуации
показал, что при роспуске вагонов машинист локомотива не придерживался
рекомендованной скорости надвига вагонов на сортировочную горку.
Для каждого из 100 случаев были построены матрицы состояний:
(6)
X = {xt
}.
Для каждого i-го параметра xit ∈ xt вероятность появления сложной си-
туации оценивалась по формулам (2), (5), а для каждого состояния xt —
путем DS-объединения в базисе Заде:
(
)
(
)
P
qxt
= min
P
qxi
i
После чего производился процесс нормализации вероятностных показате-
лей путем приведения их к интервалу [0, 1]. Технологическая ситуация счи-
талась опасной, если в матрице (6) найдется элемент xt со значением P (q|xt),
превышающим 0,8.
В результате эксперимента было выявлено 21 сложных ТС. Реально среди
них к классу сложных было отнесено 19 ситуаций. В 11 случаях наблюда-
лись соударения с превышением допустимой скорости (5 км/ч). В 7 случаях
определился отказ напольного оборудования. В одном случае выявлено пе-
ретормаживание отцепа с последующим боем вагона. Оставшиеся 2 случая
помечены как ложно идентифицированные алгоритмом. Тем не менее такие
ситуации были помечены как пограничные работниками службы автоматики
и телемеханики ОАО «РЖД».
При экспертном анализе ситуаций, идентифицированных КЛМ как
«несложные», было выявлено 3 нагона и 1 случай неперевода стрелки, т.е.
4 ложноотрицательных ситуации.
Оценка точности проводилась с учетом вычисления матрицы ошибок:
TP + TN
accuracy =
,
TP + TN + FP + FN
где TP, TN, FP, FN — истинно-положительные, истинно-отрицательные, лож-
ноположительные, ложноотрицательные объекты (ситуации) соответственно.
В случае КЛМ для вышеописанных ситуаций TP = 19, TN = 96, FP = 2,
FN = 4 accuracy = 0,95, что свидетельствует о высоком уровне эффективно-
сти предложенного подхода.
8. Выводы
В статье представлен новый предиктивный подход к анализу состояний
и прогнозированию поведения сложных технологических процессов на осно-
ве технологии предиктивной аналитики. Предлагаемый подход базируется
127
на идеи обнаружения в контролируемом процессе предикторных событий,
предшествующих появлению особых классов нештатных состояний техноло-
гических процессов. Установлена зависимость предикторных состояний тех-
нологического процесса от сложности обусловливающих их технологических
ситуаций, что позволило подойти к прогнозированию состояний контроли-
руемого процесса через оценивание сложности соответствующих технологи-
ческих ситуаций.
Для реализации предиктивного подхода авторами предложена гибридная
логико-лингвистическая модель классификатора на основе объединения ло-
гистической регрессии, вероятностной схемы комбинирования свидетельств
Демпстера-Шафера и нечеткой модели Сугено. Включение в гибридный
классификатор нечеткой модели для оценки характера ТС повышает выра-
зительность гибридного классификатора и существенно расширяет его воз-
можности по выявлению и дифференциации различных классов сложности
ТС. В частности, логико-лингвистический классификатор позволяет на ос-
нове анализа характера сложившейся технологической ситуации выявлять
различные оттенки сложности ТС путем коррекции параметров логистиче-
ской регрессии.
Проведенные эксперименты на реальных данных показали эффективность
разработанной предиктивной модели логико-лингвистического классифика-
тора для оценки состояний и прогнозирования поведения технологических
процессов, протекающих на сортировочных горках. Общность предложенно-
го предиктивного подхода и универсальность разработанной модели класси-
фикатора позволяют использовать их для решения широкого круга задач,
возникающих на транспорте и других промышленных производствах.
СПИСОК ЛИТЕРАТУРЫ
1. Букреев В.Г., Колесникова С.И., Янковская А.Е. Выявление закономерностей во
временных рядах в задачах распознавания состояний динамических объектов.
Томск. Изд-во ТПУ, 2010.
2. Цветков В.Я. Сложные технические системы // Образовательные ресурсы и
технологии. 2017. № 3 (20). С. 86-92.
3. Вычужанин В.В., Вычужанин А.В. Информационная когнитивная имитаци-
онная модель сложной технической системы // Информационные системы и
технологии ИСТ-2020. 2020. С. 677-683.
4. Буравцев А.В., Цветков В.Я. Сложные организационно вычислительные систе-
мы // Перспективы науки и образования. 2018. № 4 (34). С. 293-300.
5. Шабельников А.Н., Ольгейзер И.А. Методы повышения безопасности в КСАУ
СП // Автоматика, связь, информатика. 2017. № 3. С. 8-10.
6. Gurov Y.V., Khatlamadzhiyan A.E., Khilkov D.V., Shapovalova Y. Adaptive Fuzzy
Systems for Predictive Diagnostics of Railway Facilities // Lecture Notes in Networks
and Systems. 2022. Vol. 330 LNNS. P. 170-179.
128
7.
Суханов А.В., Ковалев С.М., Акперов И.Г., Ольгейзер И.А. Выявление пред-
вестников бифуркаций динамической системы на основе анализа структуры ее
нечеткой модели // Интегрированные модели и мягкие вычисления в искус-
ственном интеллекте ИММВ-2022: Сборник научных трудов XI Международной
научно-практической конференции. В 2-х томах, Коломна, 16-19 мая 2022 го-
да. Том 1. - Коломна: Общероссийская общественная организация «Российская
ассоциация искусственного интеллекта», 2022. С. 137-144.
8.
Gorrini V., Salome T., Bersini H. Self-structuring fuzzy systems for function
approximation // Proceedings of 1995 IEEE International Conference on Fuzzy
Systems. IEEE, 1995. Т. 2. С. 919-926.
9.
Quost B., Masson M.-H., Denœux T. Classifier fusion in the Dempster-Shafer
framework using optimized t-norm based combination rules // Int. J. Approxim.
Reason. 2011. No. 52(3). С. 353-374.
10.
Denoeux T. Logistic regression revisited: belief function analysis // International
Conference on Belief Functions. Springer, Cham, 2018. С. 57-64.
11.
Dempster A.P. Upper and lower probabilities induced by a multivalued mapping //
Annals of Mathematical Statistics. 1967. No. 38. С. 325-339.
12.
Yager R.R. Measures of entropy and fuzziness related to aggregation operators //
Inform. Sci. 1995. V. 82. No. 3-4. С. 147-166.
13.
Афанасьева Т.В. Грануляция многомерных временных рядов в задаче дескрип-
тивного анализа состояния и поведения сложных объектов // АиT. 2022. № 6.
14.
Трофимов В.Б. О подходе к интеллектуальному управлению сложными техно-
логическими процессами на примере черной металлургии // АиT. 2020. № 10.
15.
Казанцева Л.С., Югрина О.П. Нормирование сроков доставки грузов и техно-
логия перевозочного процесса // Бюллетень транспортной информации. 2015.
№ 6(240). С. 29-33.
16.
Покровская О.Д. Логистические транспортные системы России в условиях но-
вых санкций // Бюллетень результатов научных исследований. 2022. № 1.
17.
Муха Ю.А., Тишков Л.Б., Шейкин В.П. Пособие по применению правил и норм
проектирования сортировочных устройств. М.: Транспорт, 1994. 220 c.
18.
Правила и нормы проектирования сортировочных устройств на железных доро-
гах колеи 1520 мм: утв. МПС РФ 10.10.2003. М.: Техинформ, 2003. 168 c.
19.
Бессоненко С.А. Теория расчета сортировочных горок для различных клима-
тических зон: специальность 05.22.08 “Управление процессами перевозок” //
Дисс
д-ра техн. наук. М., 2010. 419 с.
20.
Olgeyzer I.A., Sukhanov A.V., Shabelnikov A.N., Ignatieva O.V. Fuzzy Approach
to Car Retarding Adaptation on Hump Yards // Lecture Notes in Networks and
Systems. 2022. Vol. 330 LNNS. P. 161-169.
21.
Правила технической эксплуатации железных дорог Российской Федерации,
утвержденные Приказом Минтранса России от 23 июля 2022 г. № 250.
129
22. № 95623 U1 Российская Федерация, МПК B61L
17/00. Комплексная си-
стема автоматизации управления сортировочным процессом (КСАУ СП):
№ 2010109685/22: заявл.
15.03.2010: опубл.
10.07.2010
/ А.И. Даньшин,
Ю.Ф. Золотарев, В.Р. Одикадзе [и др.].
23. Андронов Д.В. Опыт эксплуатации КСАУ СП // Автоматика, связь, информа-
тика. 2013. № 11. С. 16-18.
Статья представлена к публикации членом редколлегии М.Ф. Караваем.
Поступила в редакцию 27.04.2022
После доработки 08.08.2022
Принята к публикации 30.11.2022
130