Автоматика и телемеханика, № 4, 2023
Оптимизация, системный анализ
и исследование операций
© 2023 г. А.Н. ИГНАТОВ, канд. физ.-мат. наук
(alexei.ignatov1@gmail.com)
(Московский авиационный институт)
ОБ ОБЩЕЙ ПОСТАНОВКЕ ЗАДАЧИ ФОРМИРОВАНИЯ
РАСПИСАНИЯ ГРУЗОПЕРЕВОЗОК
И СПОСОБАХ ЕЕ РЕШЕНИЯ1
Формулируется новая математическая модель движения по транспорт-
ной сети, представляемой неориентированным мультиграфом. Движение
между вершинами мультиграфа предполагается возможным в заранее
определенные промежутки времени. Предлагается критерий оптималь-
ности расписания грузоперевозок, содержащий в себе помимо временных
характеристик перевозок их стоимость, также используется количество
недоставленных грузов. Задача поиска оптимального расписания форму-
лируется в виде задачи смешанного целочисленного линейного програм-
мирования. Предлагаются различные варианты алгоритма поиска при-
ближенного решения в поставленной задаче. Рассматриваются наглядные
примеры.
Ключевые слова: транспортная сеть, мультиграф, грузоперевозки, распи-
сание, смешанное целочисленное линейное программирование.
DOI: 10.31857/S0005231023040098, EDN: QILJHB
1. Введение
Задачи по поиску оптимального маршрута и времени движения по транс-
портной сети с учетом различных ограничений на пропускную способность,
время транспортировок и их стоимость давно привлекают внимание исследо-
вателей. В таких задачах нередко для моделирования транспортной сети ис-
пользуют (не)ориентированный (мульти)граф. Исследования, посвященные
поиску оптимального расписания движения грузов между вершинами гра-
фа, можно поделить на две категории по признаку фиксированности времени
транспортировок.
В классических постановках задачи маршрутизации транспорта (vehicle
routing problem) [1, 2] и задачи поиска маршрута по местам продажи товаров
1 Работа выполнена при поддержке Российского фонда фундаментальных исследований
(проект № 20-07-00046 А).
145
(traveling purchaser problem) [3] движение между вершинами графа может
быть осуществлено в любое время. В англоязычной литературе, посвящен-
ной железнодорожной тематике, время движения между вершинами транс-
портной сети часто не задано. Это время определяется при построении рас-
писания [4-9]. В [4, 5] рассматривается однопутная железная дорога. В [6, 7]
рассматривается задача построения расписания для железнодорожных сетей
общего вида при фиксированном наборе маршрутов для поездов. Также как
и в [6, 7], в [8] рассматривалась железнодорожная сеть общего вида, однако
предлагалась несколько более сложная методика формирования расписания,
предполагающая итерационную процедуру, в которой последовательно моди-
фицировались набор маршрутов для поездов и время их движения по желез-
нодорожной сети. В [9] задача поиска маршрута движения поездов и времени
их движения по железнодорожной сети решалась одновременно. Время в [9]
полагалось дискретным, что может приводить к очень большой размерности
поставленной задачи.
По сути, в задачах с нефиксированным временем движения из верши-
ны в вершину предлагается мгновенная готовность некоего транспортного
средства перевезти груз/покупателя из одной вершины в другую. Однако в
реальной жизни такое не всегда возможно. Так, например, регулярные же-
лезнодорожные и авиаперевозки осуществляются по расписанию, а иррегу-
лярные могут быть просто недоступны. А ввиду пробок на автомобильных
дорогах, возникающих, например, утром и вечером, длительность поездки
между вершинами неодинакова. Иными словами, пропускная способность ре-
бер/дуг графа транспортной сети зависит от времени. В этой связи в насто-
ящей статье рассматривается постановка задачи, в которой движение между
вершинами мультиграфа возможно только в заранее определенные проме-
жутки времени.
Среди публикаций, посвященных формированию расписания перевозок,
когда движение между вершинами осуществляется согласно некоторому за-
ранее заданному расписанию, выделим [10-16]. В [10] была рассмотрена зада-
ча одновременного формирования расписания и маршрутов движения ваго-
нов, составов по железнодорожной сети общего вида. Отметим, что в [10] так-
же предлагались постановки с нефиксированным временем движения между
вершинами. Время в [10], как и в [9], полагалось дискретным. В [11] среди
прочего исследовалась задача о перемещении вагонов, которые перевозятся
поездами с фиксированным временем отправления, между двумя железнодо-
рожными станциями. В [12, 13] рассматривалась задача о минимизации парка
локомотивов, требуемых для перевозки железнодорожных составов. В [14] ис-
следовалась задача назначения «технологического окна» — промежутка вре-
мени, в которое некоторые участки железнодорожного полотна закрываются
для проведения ремонтных работ. В [14] одновременно строилось расписа-
ние движения поездов, маршрут их следования по железнодорожной сети и
промежуток времени для ремонтных работ. В связи с большой размерностью
задачи, сформулированной в [14], поиск ее решения осуществлялся долго. По-
146
этому в [15] была усовершенствована модель движения по мультиграфу же-
лезнодорожной сети из [14]. В [16] на основе модели движения из [15] задача
назначения «технологического окна» была сформулирована в новой поста-
новке. Были предложены алгоритмы поиска приближенного решения в этой
задаче.
Следует подчеркнуть, что в постановках из [11-16] возникает проблема,
связанная с конечностью промежутка времени, на которое строится распи-
сание (далее — горизонт планирования). Внутри этого промежутка времени
надо успеть развезти все грузы. Однако это не всегда бывает возможно как
по причине недостатка в рамках горизонта планирования возможностей для
транспортировки (иными словами, некому перевозить), так и по причине то-
го, что потребность перевозки возникает к концу горизонта планирования
(иными словами, не хватает времени). Таким образом, решение задачи по-
иска оптимального расписания может не существовать, так как останутся
недоставленные грузы. При этом необходимость в доставке грузов не исчеза-
ет. Такая проблема поднималась в [10], где предлагалось расширить горизонт
планирования, либо отказаться от ограничения на прибытия всех грузов в
рамках горизонта планирования. Первый подход приводит к росту размер-
ности оптимизационной задачи, а второй подход может привести к тому, что
груз будет доставлен на станцию, с которой практически невозможно до-
браться в станцию назначения. Следовательно, актуальна разработка мате-
матической модели движения по графу транспортной сети, которая бы учи-
тывала возможность и после окончания горизонта планирования находиться
грузу в движении, если ожидаемое время в пути будет допустимым. Такая
модель и формулируется в настоящей статье. Как и в [9, 10], математическая
модель движения по транспортной сети в настоящей статье допускает любой
вид графа, время движения и маршрут движения ищутся одновременно, при
этом фиксация маршрута движения груза не обязательна.
Помимо новой математической модели движения по мультиграфу транс-
портной сети, в статье предлагается критерий оптимальности, в котором учи-
тываются различные аспекты перевозок: стоимость, время перевозок, коли-
чество недоставленных грузов. Задача поиска оптимального расписания фор-
мулируется в виде задачи смешанного целочисленного линейного программи-
рования. Предлагается и обсуждается алгоритм поиска приближенного реше-
ния в поставленной задаче. На наглядных примерах проводится сравнение
различных вариантов предложенного алгоритма.
2. Основные обозначения и предположения
Рассмотрим транспортную систему, представляемую неориентированным
мультиграфом G =< V, E >, где V — множество вершин (городов, железнодо-
рожных станций, заводов, аэропортов, морских портов) и E — множество гра-
ней (шоссе, железнодорожных путей, воздушных трасс, морских путей), со-
единяющих эти вершины. Пусть |V | = M ≥ 2. Перенумеровав вершины муль-
147
тиграфа G от 1 до M, составим множество индексов V′ = {1, 2, . . . , M}. Каж-
дый элемент этого множества единственным образом определяет вершину
мультиграфа G.
Будем отсчитывать время в минутах относительно некоторого момента
отсчета. Под горизонтом планирования будем понимать промежуток времени
[0, Tмакс.), на который строится расписание. Если план перевозок строится на
день (1440 мин), то Tмакс. = 1440.
Пусть имеется I грузов (посылок, контейнеров, поездов), для каждого из
которых заданы:
• индекс вершины отправления vотпр.i ∈ V′;
• индекс вершины прибытия (назначения) vприб.i ∈ V′;
• время готовности к отправлению tотпр.i ∈ [0, Tмакс.);
• максимальное время di, в течение которого грузу позволяется находить-
ся в пункте отправления с момента готовности;
• время груза в пути Ti, т.е. максимальное время, в течение которого
грузу позволяется находиться в транспортной системе (исключая время
в вершине отправления), вычисляемое в минутах;
• масса груза wi ∈ R+.
Груз предполагается неделимым в том смысле, что его нельзя отправить по
частям.
Движение между вершинами может выполняться только в определен-
ные промежутки времени. Пусть доступно ровно K перемещений/транс-
портировок (самолетами, морскими судами, поездами, грузовиками) между
вершинами. Каждая транспортировка представима в виде семиэлементного
= (vнач.k, vкон.k, nk, tнач.k, tкон.k, Wk, Ck), где vнач.k ∈ V′ — индекс
вершины начала движения, vкон.k ∈ V′ — индекс вершины конца движения,
причем vнач.k и vкон.k — индексы смежных вершин в графе G, nk — номер
пути, соединяющего вершины с индексами vнач.k и vкон.k, tнач.k ∈ [0, Tмакс.) —
время начала движения, tкон.k — время конца движения, Wk — максимальная
перевозимая масса при транспортировке, Ck — стоимость транспортировки
единицы массы, k = 1, K. Обозначим через Z множество всех векторов zk,
k = 1,K. Перенумеруем элементы множества Z от 1 до K. Таким образом,
число от 1 до K однозначно определяет параметры транспортировки.
При выполнении перевозок склады, в которых хранятся грузы, могут быть
заполнены. Кроме того, с грузом могут производиться некоторые операции,
например, переупаковка. В этой связи введем минимально и максимально
возможную длительность стоянки в вершине с индексом vкон.k после выпол-
нения транспортировки с номером k груза с номером i: tст.мин.i,k и tст.макс.i,k,
i = 1,I, k = 1,K. Очевидно, ∀i = 1,I, k = 1,K 0≤tст.мин.i,k ≤tст.макс.i,k.
Для некоторых грузов может быть допустимо прибытие в вершину назна-
чения и по окончании горизонта планирования. Однако во время движения
необходимо учитывать ограничение на время нахождения в транспортной си-
стеме. С этой целью необходимо задать величину τm1,m2 — ожидаемое время
148
(начиная с момента готовности к отправлению) перевозки груза из верши-
ны с индексом m1 в вершину с индексом m2, m1, m2 = 1, M. Очевидно, что
τm1,m1 = 0, m1 = 1,M. Если доступны исторические наблюдения по перевоз-
ке из вершины с индексом m1 в вершину с индексом m2, то в качестве τm1,m2
можно выбрать реализацию выборочного среднего по имеющимся наблюде-
ниям, m1, m2 = 1, M. Если эти данные отсутствуют, то указанную величину
можно оценить экспертным путем. Также введем величину ηm1,m2 — ожи-
даемое время с момента готовности до отправления груза из вершины с ин-
дексом m1 в вершину с индексом m2, которая вычисляется по аналогичному
принципу, что и τm1,m2 , m1, m2 = 1, M.
3. Математическая модель движения по транспортной сети
Сформулируем математическую модель движения введенных выше I гру-
зов по транспортной сети, задаваемой мультиграфом G, на основе множества
транспортировок Z. Под маршрутом груза с номером i будем понимать на-
бор номеров транспортировок, последовательно используемых этим грузом,
i = 1,I. Как следствие, по маршруту можно определить набор вершин, по-
следовательно пересекаемых этим грузом. Ограничим максимальное число
транспортировок в маршруте в рамках горизонта планирования некоторым
заранее заданным числом J. Под j-м этапом маршрута груза с номером i
будем понимать движение этого груза, когда используется j-я по порядку ис-
пользования транспортировка, i = 1, I, j = 1, J + 1. Будем называть вершину
промежуточной для i-го груза, если она не является для него ни вершиной
отправления, ни вершиной назначения, i = 1, I.
Введем вспомогательные переменные δi,j,k, характеризующие использова-
ние грузом с номером i транспортировки с номером k на j-м этапе, i = 1, I,
j = 1,J + 1, k = 1,K. Переменная δi,j,k равна нулю, если транспортировка с
номером k не используется i-м грузом на j-м этапе, и 1 — в противоположном
случае.
Теперь сформулируем множество допустимых стратегий.
По определению переменных δi,j,k имеем
(1)
δi,j,k
∈ {0, 1}, i = 1, I, j = 1, J + 1, k = 1, K.
Используем ограничения из [15, 16], которые задают движение исключи-
тельно по смежным вершинам графа G
(
)
∑
∑
∑
(2)
δi,j,kvкон.k ≤
δi,j+1,kvнач.
+ 1- δi,j+1,k M3
, i=1,I, j =1,J -1,
k
k=1
k=1
k=1
(
)
∑
∑
∑
(3)
δi,j,kvкон.k ≥
δi,j+1,kvнач.
k
- 1- δi,j+1,k
M, i=1,I, j =1,J -1.
k=1
k=1
k=1
149
Согласно [15] если для некоторого
˜i ∈ {1,...,I} и некоторого j ∈ {1,...,J}
справедливо
∑
∑
δ
δ
= 0, j = j, J.
˜i,j,k =0,то
i,j+1,k
k=1
k=1
Если же
∑
∑
∑
δ
˜i,j,k =1,то
δ
˜i,j+1,k =0или
δ
˜i,j+1,k =1.
k=1
k=1
k=1
Поскольку этапов для движения может быть не более J, введем ограни-
чение
∑
(4)
δi,J+1,k
= 0.
i=1 k=1
Так как груз неделим, то на любом этапе (в том числе первом) можно
использовать максимум одну транспортировку
∑
(5)
δi,1,k
≤ 1, i = 1, I.
k=1
Если перевозка груза начинается, то она должна быть осуществлена из
соответствующей вершины отправления
∑
∑
(6)
δi,1,kvнач.k = vотпр.
δi,1,k
, i = 1,I.
i
k=1
k=1
Груз может быть не отправлен, если время готовности к отправлению
в сумме с максимальным количеством времени пребывания в вершине от-
правления выходят за пределы горизонта планирования. В противном слу-
чае нужно отправить груз не позднее максимального количества времени в
вершине отправления с момента готовности. Поэтому наложим ограничения
(
)
∑
∑
(7)
δi,1,ktнач.
+
1-
δi,1,k Tмакс. ≤ tотпр.i + di
, i = 1,I.
k
k=1
k=1
Для того чтобы отправить груз не ранее момента готовности, введем ограни-
чение
(
)
∑
∑
(8)
tотпр.i ≤
δi,1,ktнач.
k
+
1-
δi,1,k Tмакс.
, i = 1,I.
k=1
k=1
150
Запретим грузу выходить из вершины и входить в вершину более чем один
раз
∑
∑
(9)
δi,j,k
≤ 1, i = 1, I, m = 1, M,
j=1 k:vнач.k=m,1≤k≤K
∑
∑
(10)
δi,j,k
≤ 1, i = 1, I, m = 1, M.
j=1 k:vкон.k=m,1≤k≤K
Отправление в промежуточных вершинах маршрута не должно происхо-
дить раньше прибытия в эти вершины. Поэтому с учетом ограничений на
минимальное и максимальное время стоянки, имеем
∑
(11)
δi,j,k(tкон.k + tст.мин.i,k) ≤
k=1
(
)
∑
∑
≤ δi,j+1,ktнач.
+
1-
δi,j+1,k T, i = 1,I, j = 1,J - 1,
k
k=1
k=1
где
T =
max
tкон.k + tст.мин.i,k,
i∈{1,...,I},k∈{1,...,K}
∑
(12)
δi,j,k(tкон.k + tст.макс.i,k) ≥
k:1≤k≤K,vкон.k=vприб.
i
∑
≥ δi,j+1,ktнач.k, i = 1,I, j = 1,J - 1.
k=1
Ограничения (11) идентичны ограничениям из [15, 16], однако произведена
замена 2Tмакс. на T . Данная замена требуется в связи с тем, что в рассмат-
риваемой модели перевозок для некоторого k ∈ {1, . . . , K} может оказаться
tкон.k > Tмакс.. Ограничения (12) аналогичны использованным в [15, 16] с уче-
том того, что контроль времени стоянки требуется только в промежуточных
вершинах маршрута.
В [15, 16] не учитывался тот факт, что отправление не обязано прибыть
в пункт назначения в рамках горизонта планирования. Поэтому, если пред-
полагается, что груз будет стоять в некоторой промежуточной вершине в
момент окончания горизонта планирования, необходимо гарантировать до-
пустимость такой стоянки
∑
(
)
(13)
δi,j,k
tкон.k + tст.макс.i,k - Tмакс.
+
k:1≤k≤K,vкон.k=vприб.
i
∑
+Tмакс.
δi,j+1,k ≥ 0, i = 1,I, j = 1,J.
k=1
151
Также необходимо запретить дальнейшее движение груза после прибытия в
пункт назначения. С этой целью введем ограничения
(
)
∑
∑
(14)
δi,j,k ≤ 2
1-
δi,j+1,k
, i = 1,I, j = 1,J.
k:1≤k≤K,vкон.k=vприб.
k=1
i
Введем величин
Ti,j — количество времени, проводимого грузом с номе-
ром i в j-й (по порядку следования) промежуточной вершине своего марш-
рута в рамках горизонта планирования
∑
(15)
Ti,j =
δi,j+1,k (tнач.k - Tмакс.) +
k=1
∑
+
δi,j,k (Tмакс. - tкон.k), i = 1,I, j = 1,J.
k:vкон.k=vприбi,tкон.k<Tмакс.,1≤k≤K
Для удобства формулирования математической модели также положим
Ti,J+1 = 0.
Введем новые переменные Fi, характеризующие ожидаемое количество
времени, требуемого до прибытия в пункт назначения грузу с номером i,
после окончания горизонта планирования
∑∑
(
)
= τvотпр.
δi,j,k τvкон.
+
,vприб. +
,vприб.i -τvнач.k,vприб.
i
i
k
i
j=1 k=1
∑
∑
+
δi,j,k (tкон.k - Tмакс.) , i = 1,I.
j=1 k:tкон.k≥Tмакс.,1≤k≤K
Движение грузов должно осуществляться с учетом ожидаемого времени
до прибытия в пункт назначения. Например, продолжительное пребывание в
промежуточных вершинах в маршруте должно быть возможно, когда подоб-
ная стратегия не приведет к тому, что время пребывания груза в транспорт-
ной системе будет превышено. В этой связи введем ограничения
∑
∑
(17) Fi +
δi,j,k (tкон.k - Tмакс.)+
j=1 k:tкон.k<Tмакс.,vкон.k=vприб.i,1≤k≤K
(
)
∑
∑
+ δi,1,k (Tмакс. - tнач.
)≤Ti +
1-
δi,1,k ηvотпр.
i = 1,I.
k
,vприб. ,
i
i
k=1
k=1
152
Если требуется жесткое задание набора вершин, пересекаемых грузом,
можно добавить соответствующие ограничения из [15].
Теперь введем переменные ωi, характеризующие, прибыл ли груз с номе-
ром i в пункт назначения в рамках горизонта планирования: 0 — прибыл, 1 —
не прибыл
∑
∑
(18)
ωi = 1 -
δi,j,k
, i = 1,I.
j=1 k:tкон.k<Tмакс.,vкон.k=vприб.i,1≤k≤K
Прокомментируем введенные ограничения. Рассмотрим груз с номером
i∗ ∈ {1,... ,I}.
Рассмотрим (13)-(15). Для этого вначале отметим, что возможны несколь-
ко случаев (выберем j∗ ∈ {1, . . . , J}):
1) при движении груза с номером i∗ этап с номером j∗ не задействован;
2) при движении груза с номером i∗ этап с номером j∗ задействован, груз
не прибыл в пункт назначения, этап с номером j∗ + 1 не задействован;
3) при движении груза с номером i∗ этап с номером j∗ задействован, груз
не прибыл в пункт назначения, этап с номером j∗ + 1 задействован;
4) при движении груза с номером i∗ этап с номером j∗ задействован, по окон-
чании этапа груз прибыл в рамках горизонта планирования или прибудет
после окончания горизонта планирования в пункт назначения.
∑
В случае 1)
δi∗,j∗,k = 0. В виду ограничений (1)
k=1
∑
∑
δi∗,j∗,k =
δi∗,j∗,k = 0,
k:1≤k≤K,vкон.k=vi∗иб.
k:1≤k≤K,vкон.k=vi∗иб.
∑
а из-за ограничений (2), (3)
δi∗,j∗+1,k = 0. Поэтому (13), (14) выполняются.
k=1
Величин
Ti∗,j∗ окажется равной нулю.
В случае 2)
∑
∑
δi∗,j∗,k = 1,
δi∗,j∗,k = 0,
k:1≤k≤K,vкон.k=vi∗иб.
k:1≤k≤K,vкон.k=vi∗иб.
∑
δi∗,j∗+1,k = 0.
k=1
Ограничение (14) выполняется, так как его левая часть окажется равной ну-
лю, а правая — двум. Если груз, не прибыв в пункт назначения, находится в
момент окончания горизонта планирования в движении, то ограничение (13)
153
выполнится автоматически. Это связано с тем, что время окончания транс-
портировки будет не меньше Tмакс.. При этом величин
Ti∗,j∗ окажется рав-
ной нулю, что логично, так как остановка, если таковая будет, в j∗-й проме-
жуточной по порядку следования вершине произойдет уже после горизонта
планирования. Если же груз, не прибыв в пункт назначения, стоит в момент
окончания горизонта планирования, то ограничение (13) будет гарантиро-
вать допустимость стоянки по крайней мере до конца горизонта планирова-
ния. Переменна
Ti∗,j∗ будет равна времени стоянки в j∗-й промежуточной
по порядку следования вершине в рамках горизонта планирования.
В случае 3)
∑
∑
δi∗,j∗,k = 1,
δi∗,j∗,k = 0,
k:1≤k≤K,vкон.k=vприб.
k:1≤k≤K,vкон.k=vприб.
i∗
i∗
∑
δi∗,j∗+1,k = 1.
k=1
Ограничение (14) выполняется, так как его левая и правая часть окажет-
ся равной нулю. Ограничение (13) выполнится по определению, так как для
всех i = 1, I, k = 1, K по условию tкон.k + tст.макс.i,k ≥ 0. Величин
Ti∗,j∗ окажет-
ся равной разности между временем отправления и временем прибытия в
j∗-ю промежуточную по порядку следования вершину.
В случае 4)
∑
∑
δi∗,j∗,k = 0,
δi∗,j∗,k = 1.
k:1≤k≤K,vкон.k=vприб.
k:1≤k≤K,vкон.k=vприб.
i∗
i∗
∑
Ввиду ограничений (2), (3)
δi∗,j∗+1,k может быть равна либо нулю, либо
k=1
единице. Ограничения (13) выполняются в любом из указанных вариантов.
∑
Если
δi∗,j∗+1,k равна нулю, то ограничение (14) выполняется. Величина
k=1
Ti∗,j∗ будет равна нулю, что соответствует смыслу введенной переменной, так
∑
как у груза будет только j∗ - 1 промежуточных вершин. Если же δi∗,j∗+1,k
k=1
равна единице, то ограничение (14) не выполняется. Значит, такой вариант
недопустим. Это соответствует здравому смыслу, так как в случае прибытия
в пункт назначения, не имеет смысла перевозить груз дальше.
Теперь обсудим (16)-(18). Если груз с номером i∗ не отправляется из
∑
пункта отправления, то
δi∗,1,k = 0. Как следствие, из ограничений (2),
k=1
∑
(3)
δi∗,j,k = 0, j = 2,J. Значит, Fi∗ будет равна ожидаемому времени в
k=1
154
пути из вершины отправления в вершину назначения. Если будет использо-
вано ровно j ∈ {1, . . . , J} транспортировок, то суммирование первой и второй
компоненты Fi∗ даст τvкон.
,vприб. ,гдеk∗ —номерj-йпопорядкуиспользова-
k∗
i∗
ния транспортировки груза с номером i∗. Иными словами, получится ожи-
даемое количество времени, которое требуется грузу для прибытия в вер-
∗
из вершины с индексом vк∗н.k. Если груз по оконча-
нии горизонта планирования находится в движении, то третья компонента
Fi∗ окажется ненулевой и будет характеризовать время, которое потребуется
грузу до прибытия в вершину с индексом vк∗н.k после окончания горизонта
планирования.
Если груз не отправлен в рамках горизонта планирования, то вторая и
третья компоненты левой части неравенства (17) равны нулю. В этом слу-
чае требуется, чтобы ожидаемое время прибытия из вершины отправления
в вершину назначения было не больше допустимого времени нахождения на
графе суммарно с ожидаемым временем от момента готовности до момента
отправления. Если груз отправлен и доставлен в рамках горизонта планиро-
вания, то Fi∗ = 0, а суммирование второй и третьей компоненты левой части
неравенства даст время между окончанием движения груза и началом дви-
жения груза. Если груз отправлен, но не доставлен в рамках горизонта пла-
нирования, то вторая компонента неравенства (17) равна нулю, а Fi∗ будет
складываться суммарно с количеством времени, которое груз уже находится
на сети после отправления из вершины отправления.
Если на каком-то этапе груз с номером i∗ прибыл в вершину назначе-
ния, причем этап был закончен до окончания горизонта планирования, тогда
ω∗i = 1. В противном случае окажется ω∗i = 0.
Необходимость не превысить максимально допустимый вес при транспор-
тировке с номером k приводит к ограничениям
∑
(19)
δi,j,kwi ≤ Wk
, k = 1,K.
i=1 j=1
Отметим, что ограничения (1)-(19) могут оказаться несовместными, а зна-
чит, множество допустимых стратегий, задаваемое этими ограничениями, пу-
сто. Такой случай может возникнуть, например, когда транспортировки меж-
ду вершинами слишком медленные. Для того чтобы гарантировать совмест-
ность ограничений (1)-(19), можно потребовать выполнение условий
(20)
tотпр.i + di ≥ Tмакс., τvотпр.
, i = 1,I.
i
,vприб.i ≤Ti+ηvотпр.i,vприб.
i
Если эти условия выполнены, то каждый груз имеет возможность остаться в
вершине отправления в рамках горизонта планирования. Однако даже если
условия (20) нарушаются, это не означает, что ограничения (1)-(19) обяза-
тельно несовместны.
155
4. Критерий для формирования плана грузоперевозок
Сформулируем критерий для поиска оптимального расписания
∑
∑
∑
∑ˆT
c1
δi,j,k (min{tкон.k,Tмакс.} - tнач.k)
+c2
i,j
+
i=1 j=1 k=1
i=1 j=1
5
67
8
5
67
8
суммарное время в движении
суммарное время
в рамках горизонта планирования
стоянки в
промежуточных
вершинах
(
(
)
)
∑
∑
∑
+c3
δi,1,ktнач.
+
1-
δi,1,k Tмакс. - tотпр.
+
k
i
i=1
k=1
k=1
5
67
8
суммарное время стоянки в вершинах отправления
(21)
с момента готовности к отправлению
∑
∑
∑
∑
+c4
δi,j,kwiCk
+c5
Fi
+c6
ωi
→
i=1 j=1 k=1
i=1
i=1
5
67
8
5
67 8
5
67 8
суммарная стоимость
суммарное
суммарное
транспортировок
ожидаемое
количество
время до
недоставленных
доставки
грузов в рамках
горизонта
планирования
→
min
,
δi,j,k
Ti,j≥0
Ti,J+1=0,Fi≥0,ωi∈{0,1},i=1,I,j=1,J+1,k=1,K
при ограничениях (1)-(19), где c1, c2, c3, c4, c5, c6 — некоторые неотрица-
тельные числа. Отметим, что, с одной стороны, требование неотрицательно-
сти переменных Fi
Ti,j избыточно, так как эти переменные неотрицательны
по определению, i = 1, I, j = 1, J. Более того, ввиду ограничений (16), (17)
сами эти переменные избыточны — их можно заменить на другие участвую-
щие в оптимизации переменные, причем при замене получится задача цело-
численного линейного программирования. Однако, с другой стороны, непо-
средственное наличие этих переменных и ограничение на их неотрицатель-
ность позволяет в некоторых задачах ускорить поиск оптимального решения.
И, кроме того, использование этих переменных позволяет сделать запись кри-
териальной функции лаконичнее и понятнее.
Под r-й компонентой критерия будем понимать сомножитель числа cr
в (21), r = 1, 6.
При различных значениях чисел c1, c2, c3, c4, c5, c6 получается целый
спектр различных прикладных задач. При c1 = . . . = c5 = 0, c6 = 1 имеем за-
дачу по минимизации количества недоставленных в рамках горизонта пла-
нирования грузов, или, иными словами, задачу о максимизации количества
перевезенных грузов. При c1 = c2 = c3 = c5 = c6 = 0, c4 = 1 получаем задачу
по минимизации стоимости перевозок. При c1 = c2 = c3 = c4 = c6 = 0, c5 = 1
156
имеем задачу по минимизации суммарного ожидаемого времени до прибы-
тия грузов в соответствующие пункты назначения. При c1 = c2 = c3 = c5 = 1,
c4 = c6 = 0 получаем задачу по минимизации суммарного прошедшего и ожи-
даемого оставшегося времени в пути. При c1 = c2 = c3 = 1, c4 = c5 = c6 = 0
имеем задачу по минимизации суммарного количества времени на стоянках
и в движении в рамках горизонта планирования. Возможно использование и
других комбинаций чисел c1, . . . , c6 [15]. Следует отметить, что не все компо-
ненты критерия имеют одинаковую размерность и порядок значений: первая,
вторая, третья, пятая компоненты измеряются в минутах, четвертая — в еди-
ницах стоимости, шестая — в штуках. Для учета разной природы компонент
критерия можно, например, дополнительно вводить ограничения на их значе-
ния. Например, количество перевезенных грузов должно быть не меньше 10.
Некоторые ограничения возникают из логики конкретной задачи. К примеру,
бюджетное ограничение — суммарная стоимость перевозок не должна пре-
вышать имеющийся бюджет перевозок. Его можно ввести дополнительно.
Следует отметить, что представленная математическая модель движения
прежде всего предназначена для задачи перевозки тех или иных грузов (по-
сылок, контейнеров) различными транспортными средствами (самолетами,
поездами и др.). А именно представленная модель позволяет «привязать» тот
или иной груз к тому или иному транспортному средству и назначить время
перевозки грузу. При этом представленную модель можно использовать и для
формирования расписания движения самих транспортных средств. Так, на-
пример, при помощи предложенной модели можно формировать расписание
движения грузовых поездов: в терминологии настоящей статьи грузом станет
грузовой поезд, транспортным средством — локомотив, а понятие транспор-
тировка будет синонимично «поднитке». Масса поезда будет полагаться еди-
нице, как и максимальный вес при той или иной транспортировке. При этом
предложенную модель можно использовать и для других отраслей транс-
порта, добавляя при необходимости те или иные ограничения из конкрет-
ной предметной области. Отсюда резюмируем, что предложенная математи-
ческая модель движения по графу и критерий формируют универсальную
постановку задачи грузоперевозок.
5. Алгоритм для нахождения начального/приближенного решения
Ввиду возможной высокой размерности задачи (21) при ограничени-
ях (1)-(19) предложим следующий алгоритм для нахождения начально-
го/приближенного решения поставленной задачи. Алгоритм основывается на
последовательном решении задачи (21) с ограничением (1)-(19) для некото-
рого набора грузов.
1. Множество номеров грузов расщепляется на S непересекающихся под-
⋃
множеств Is, т.е. {i ∈ N : i ≤ I} =
Is, причем ∀s1 ∈ 1,S, s2 ∈ 1,S: s1 = s2
s=1
Is1
⋂Is2 = ∅.
157
2. Инициализируется параметр s = 1.
3. Решается задача
∑
∑
∑
∑ˆT
c1
δi,j,k (min{tкон.k,Tмакс.} - tнач.
k
)+c2
i,j +
i∈Is j=1 k=1
i∈Is j=1
(
(
)
)
∑
∑
∑
+c3
δi,1,ktнач.
+
1-
δi,1,k Tмакс. - tотпр.
+
k
i
i∈Is k=1
k=1
(22)
∑
∑
∑
+c4
δi,j,kwiCk + c5
Fi +
i∈Is j=1 k=1
i∈Is
∑
+c6
ωi →
min
,
δi,j,k
Ti,j≥0
Ti,J+1=0,Fi≥0,ωi∈{0,1},i∈Is,j=1,J+1,k=1,K
i∈Is
при ограничениях (1)-(18) и ограничениях
∑
∑
(23)
δi,j,kwi ≤ Wk -
∑˜δ
, k = 1,K.
i,j,kwi
i∈Is j=1
⋃
j=1
i∈ Ip
p=1
Если решение этой задачи существует, то задаются величиныδi,j,k равные
единице, если груз с номером i на этапе с номером j использует транспор-
тировку с номером k, и нулю иначе, i ∈ Is, j = 1, J + 1, k = 1, K. Происхо-
дит переход к шагу 4. Если решение задачи (22) при ограничениях (1)-(18),
(23) не существует, то процедура поиска приближенного решения завершена
неуспешно.
4. Если s < S, то s увеличивается на единицу и происходит переход к ша-
гу 3. Если s = S, то процедура поиска приближенного решения завершена
успешно.
Если S = 1, то предложенный алгоритм позволит найти точное решение,
поскольку в этом случае решается непосредственно задача (21) при ограниче-
ниях (1)-(19). Если S > 1, то гарантировать оптимальность в задаче (21) при
ограничениях (1)-(19) полученного при помощи алгоритма решения нельзя.
В некоторых случаях может оказаться, что решение непосредственно задачи
(21) при ограничениях (1)-(19) находится быстрее, чем приближенное ре-
шение при помощи алгоритма. Однако, как будет показано в дальнейшем в
примере, использование алгоритма в ряде случаев позволяет быстро найти
допустимое решение в задаче (21) при ограничениях (1)-(19) с приемлемым
значением критерия (порядка 5-10% увеличения значения критерия относи-
тельно критерия на оптимальном решении).
В примере также будет продемонстрирован случай, когда представленный
выше алгоритм завершается неуспешно, т.е. допустимое решение в задаче (21)
158
при ограничениях (1)-(19) при работе алгоритма не было найдено. В общем
случае неуспешное завершение алгоритма может быть вызвано как исходной
несовместностью ограничений (1)-(19), так и спецификой построения прибли-
женного решения, когда расписание ищется итерационно для групп грузов.
Для гарантированно успешного завершения алгоритма можно потребовать
выполнения условий (20). Другим способом получения решения по отправке
хотя бы какого-то количества грузов является использование другого алго-
ритма, отличающегося от представленного выше тем, что на шаге 3 при от-
сутствии решения алгоритм не прекращает свою работу. Опишем два способа
построения такого алгоритма. В первом способе при отсутствии решения на
шаге 3 происходит вычеркивание грузов, которым не удалось построить рас-
писание, из списка перевозок, т.е. происходит отказ в перевозке для данных
грузов. Подобный подход использовался, например, в [4, 7]. Вторым спосо-
бом является использование величин Ti, di в задаче (22) при ограничениях
(1)-(18), (23) не в качестве фиксированных, а в качестве переменных оптими-
зации, i ∈ Is. В этом случае получится как минимум одно решение — остать-
ся в вершине отправления в рамках горизонта планирования. Отметим, что
предложенные модификации, вообще говоря, требуют изменения начальных
данных, поэтому в дальнейшем в примере они не используются.
Аналогично [15, 16] предложим несколько вариантов предложенного алго-
ритма. Алгоритмом по направлению (алгоритмом 1) будем называть такой
алгоритм, в котором на 1-м шаге дробление происходит по принципу нахож-
дения во множествах Is номеров грузов, у которых одинаковые вершины от-
правления, а также одинаковые вершины назначения, s = 1, S. Чем меньше
элементов во множестве, тем меньше номер этого множества. Алгоритмом по
наименьшему/наибольшему времени (алгоритмом 2.1/алгоритмом 2.2) будем
называть такой алгоритм, при котором на 1-м шаге дробление происходит по
возрастанию/убыванию времени готовности грузов к отправлению. А имен-
но множество I1 будет состоять из номера груза с самым ранним/поздним
временем готовности к отправлению, I2 — со вторым/предпоследним и так
далее.
6. Пример
Рассмотрим задачу формирования грузовых перевозок на участке желез-
нодорожной сети из [15, 16]. Ввиду большого количества исходных данных
для лаконичности изложения приведем лишь значения параметров из настоя-
щей постановки задачи, которые не использовались при построении модели
движения по графу в [15, 16]: Ck = 2, Wk = 1, wi = 1, i = 1, 62, k = 1, 1249.
Значения величин τm1,m2 зададим как минимальное время в пути до верши-
ны с индексом m2 при отправлении из вершины m1 через 360 мин от начала
отсчета (по сути в 6 утра), m1, m2 = 1, 42. Если допустимых транспортировок
не оказывается, то τm1,m2 полагаем равной 4000, m1, m2 = 1, 42. Для просто-
ты будем предполагать, что ηm1,m2 = 0, m1, m2 = 1, 42. В [15, 16] вводились
159
только первые 3 компоненты критерия, поэтому для сравнимости резуль-
татов в настоящей постановке задачи и [15, 16] положим c1 = c2 = c3 = 1,
c4 = c5 = c6 = 0. При таком задании чисел c1,... ,c6 критериальная функ-
ция в (21) и в [15, 16] совпадают. Отметим, что хотя формально величины
Wk, wi, i = 1,62, k = 1,1249 в [15, 16] не использовались, при приведенных
выше значениях этих величин ограничения на максимальный вес (19) иден-
тичны ограничениям на максимальное количество поездов, использующих
одну «поднитку», из [15, 16]. А при заданных значениях чисел c1, . . . , c6 ве-
личины Ck никак в оптимизации не участвуют, k = 1, 1249. Таким образом,
главным отличием настоящей постановки задачи от постановки в [15, 16] яв-
ляется то, что прибытие в пункты назначения в [15, 16] должно случиться
обязательно в рамках горизонта планирования, в то время как в настоящей
постановке это может и не произойти. Условия (20) нарушаются.
По итогам численного эксперимента оказалось, что алгоритмы 1 и 2.1 за-
вершились успешно, алгоритм 2.2 — нет. Оптимальное значение критериаль-
ной функции в (21) на решении, полученном при помощи алгоритма 1/ал-
горитма 2.1, составило 26 951/27 790. Значение критерия в [16] на решениях
по алгоритмам 1 и 2 из этой же работы, которые аналогичны алгоритмам 1
и 2.1 соответственно — 26 951 и 27 755. Решение и по алгоритму 1, и по ал-
горитму 2.1 таково, что все поезда прибывают в соответствующие пункты
назначения в рамках горизонта планирования, хотя, повторимся, это и не
было обязательным требованием. Маршруты для поездов по алгоритмам из
настоящей статьи и по их аналогам из [16] совпали частично. Некоторое ухуд-
шение значения критерия в (21) на решении по алгоритму 2.1 относительно
значения критерия в [16] на решении по алгоритму 2 вызвано тем, что в
настоящей постановке задачи в каждой вершине, в которой находится груз,
производится контроль времени до прибытия в вершину назначения. Одна-
ко более важной причиной является то, что потенциально в задаче (22) при
ограничениях (1)-(18), (23) оптимум не единственный. При этом от выбо-
ра конкретного решения на s-м шаге зависит движение грузов, для которых
расписание будет находиться далее — на s + 1, s + 2, . . . , S шагах любого
варианта алгоритма. Таким образом, следует проводить дополнительную оп-
тимизацию среди оптимальных решений в задаче (22) при ограничениях (1)-
(18), (23). Однако формализация критерия такой оптимизации нетривиальна
и представляет отдельный научный интерес.
Заметим, что если рассмотреть даже не все грузы, а их часть, например,
первые 15 грузов (т.е. грузы с номерами 1, 2, . . . , 15) из списка перевозок, то
оптимальное решение в задаче (21) при ограничениях (1)-(19) за 2 ч счета
не находится. В этой связи для данного примера сделать вывод о точности
полученного приближенного решения, к сожалению, невозможно.
Время поиска решения по алгоритму
1/алгоритму
2.1
составило
45,5/9,5 мин. Следует отметить деградацию времени поиска решения по ал-
горитму 1 в сравнении с [15, 16]. Это вызвано тем, что в рамках поставленной
задачи появились дополнительные возможности: не отправляться из пункта
160
назначения, не прибыть в пункт назначения по окончании горизонта плани-
рования. При этом для алгоритма 2.1 расход времени увеличился несуще-
ственно.
Проанализируем теперь время работы алгоритма 2.1 в зависимости от ко-
личества грузов, планируемых к перевозке. Выберем 5, 10, 15, . . . , 55, 60 пер-
вых грузов из списка перевозок и вычислим для каждого случая время ра-
боты алгоритма 2.1 в минутах.
Таблица 1. Время работы алгоритма 2.1 в минутах
Количество
5
10
15
20
25
30
35
40
45
50
55
60
грузов к перевозке
Время работы
0,71
1,51
2,65
3,13
4,16
4,8
6,97
6,73
7,28
8
8,5
9,1
алгоритма
Как следует из представленных результатов, увеличение количества гру-
зов не обязательно ведет к увеличению времени счета. Этот факт вызван
тем, что добавление каждого нового груза к списку перевозок запускает цеп-
ную реакцию и приводит к полному пересчету расписания ввиду того, что
согласно алгоритму 2.1 расписание в первую очередь ищется для груза с ми-
нимальным временем готовности к отправлению, а не для груза с минималь-
ным номером. Исходный же список перевозок не является отсортированным
по возрастанию времени готовности к отправлению. При этом добавление
каждых 5 новых грузов для расчета, как правило, приводит к увеличению
времени работы алгоритма на 0,5-1,5 мин.
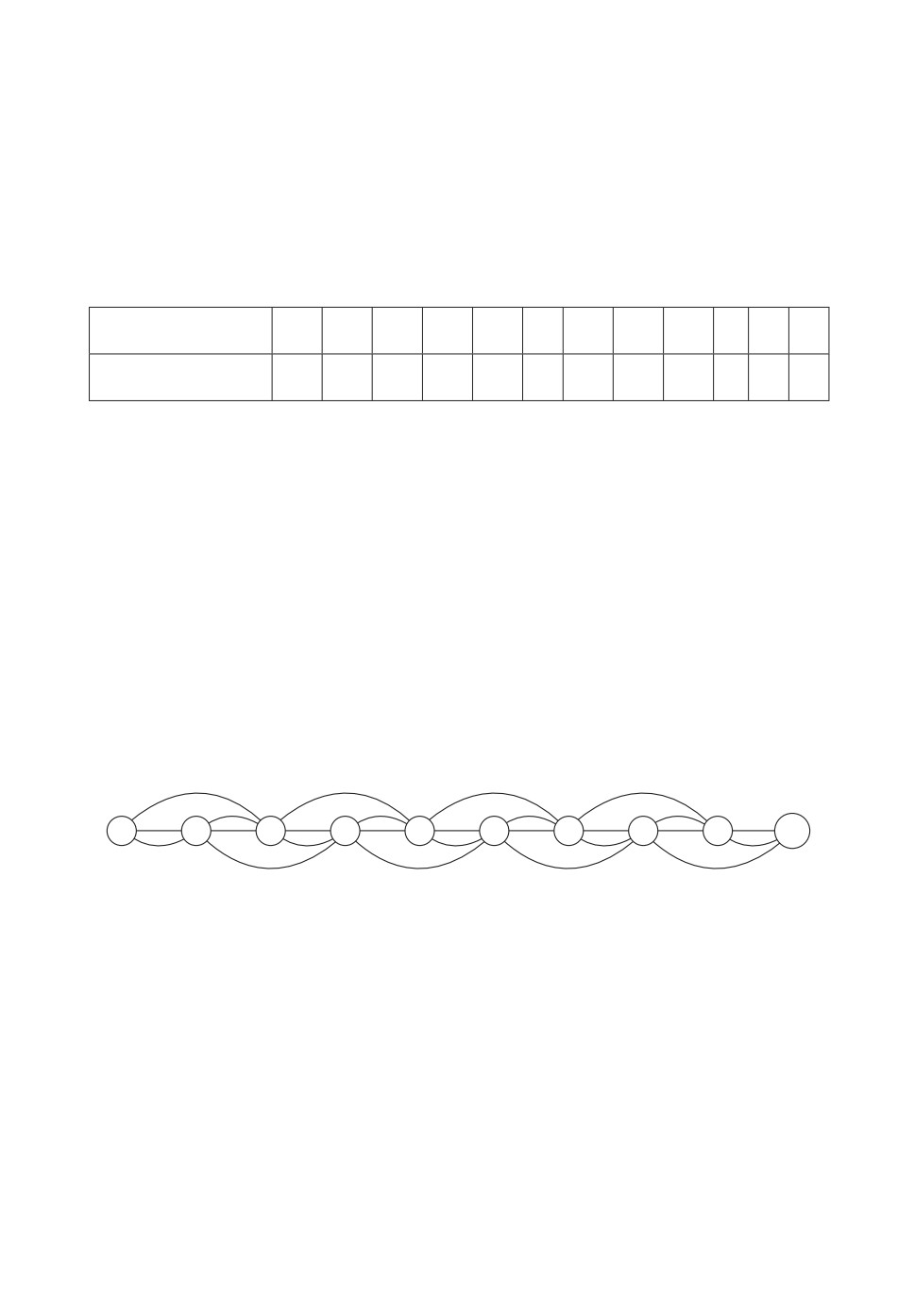
Рассмотрим другой пример, который является модельным. Пусть транс-
портная сеть имеет следующий вид
1
2
3
4
5
6
7
8
9
10
Мультиграф G транспортной сети.
Нумерация путей на рисунке опущена. Если две смежные вершины соеди-
нены двумя ребрами, т.е. двумя путями, то ребро, представляемое прямой
линией, имеет номер 1, в ином случае — 2.
Положим Tмакс. = 1440 мин. Выбран некоторый момент отсчета. Начиная
с момента отсчета:
• каждые 60 мин в вершине с индексом 1 появляется по 10 грузов оди-
накового веса в 1 единицу, эти грузы требуется перевезти в вершину с
индексом 10;
• каждые 60 мин из вершины с индексом m в вершину с индексом m + 1
по пути номер 2 отправляется некоторое транспортное средство, кото-
рое может перевезти не более 5 единиц веса, стоимость транспортировки
161
составляет 3 условные единицы за единицу веса, время транспортиров-
ки — 120 мин, m = 1, 9.
• каждые 60 мин из вершины с индексом m в вершину с индексом m + 1
по пути номер 1 отправляется некоторое транспортное средство, которое
может перевезти не более 5 единиц веса, стоимость транспортировки со-
ставляет 9 условных единиц за единицу веса, время транспортировки —
60 мин, m = 1, 9.
• каждые 60 мин из вершины с индексом m в вершину с индексом m + 2
отправляется некоторое транспортное средство, которое может пере-
везти не более 5 единиц веса, стоимость транспортировки составляет
81 условных единиц за единицу веса, время транспортировки — 60 мин,
m = 1,8.
Именно такой выбор стоимостей транспортировок был вызван тем, что
более быстрая транспортировка по одному и тому же направлению должна
стоить дороже. Максимальное время каждого груза в пути с момента начала
движения — 1 сут.
Положим τm1,m2 = 60|m2 - m1|, m1 = 1, 10, m2 = 1, 10. Такой выбор вы-
зван тем, что время в пути между смежными вершинами мультиграфа
G может составлять 60 мин, m1, m2 = 1, 10. Предположим, что ηm1,m2 = 0,
m1,m2 = 1,10.
Учитывая вышесказанное, получается I = 240, K = 624. Положим di =
= 180, tст. мин.i,k = 0 и tст. макс.i,k = 120, i = 1, I, k = 1, K. Поскольку максималь-
ное количество транспортировок, которые нужны при перемещении из вер-
шины с индексом 1 в вершину с индексом 10, равно девяти, то положим J = 9.
Условия (20) не выполняются.
Проиллюстрируем работу алгоритмов 1, 2.1 и 2.2 при различных значе-
ниях чисел c1, c2, c3, c4, c5, c6. Предварительно отметим, что алгоритм 1
продуцирует точное решение, так как в исследуемой задаче у всех грузов
совпадают вершины отправления, а также вершины назначения.
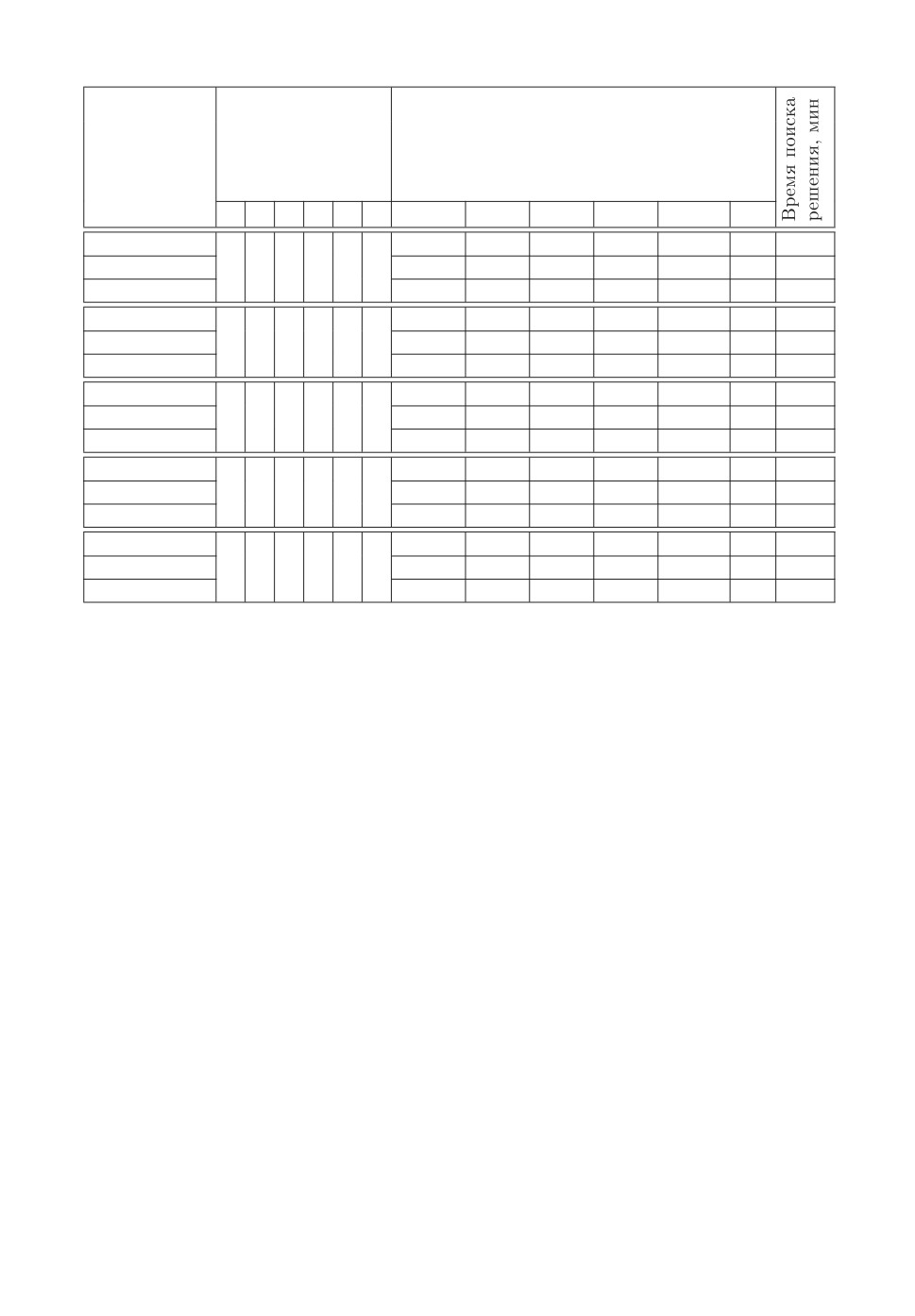
Жирным шрифтом в табл. 2 выделены значения критериальной функции
в (21) на том или ином решении.
Как следует из табл. 2, иногда поиск точного решения занимает пример-
но столько же времени, сколько и поиск приближенного. Но в некоторых
случаях (c1 = c2 = c3 = c5 = c6 = 0, c4 = 1; c1 = c2 = c3 = c4 = c6 = 0, c5 = 1;
c1 = ... = c5 = 0, c6 = 1) приближенное решение находится в разы быстрее.
При этом для любого из рассмотренных вариантов чисел c1, c2, c3, c4, c5, c6
поиск приближенного решения стабильно занимает 6-7 мин. Как правило,
алгоритм 2.2 точнее алгоритма 2.1. Погрешность наилучшего из приближен-
ных решений составляет порядка 5-10% относительно точного. При задаче
минимизации стоимости перевозок велико время перевозок, так как дешевые
перевозки длительны по времени. И, напротив, в задаче максимизации чис-
ла доставленных грузов растет стоимость перевозок. Задача по минимизации
ожидаемого оставшегося времени до прибытия в пункты назначения ожидае-
162
Таблица 2. Результаты численного эксперимента
Параметры
Компоненты критерия
Решение
критерия
c1 c2 c3 c4 c5 c6
1
2
3
4
5
6
Точное
61440
2460
2100
65151
22140
50
6,75
Алгоритм 2.1
1
1
1
0
0
0
64200
6000
6600
54510
29700
60
7
Алгоритм 2.2
63900
1800
6000
57990
27300
55
6,5
Точное
66000
0
0
73260
10800
50
6,85
Алгоритм 2.1
1
1
1
0
1
0
71100
4800
2100
63645
15300
65
7
Алгоритм 2.2
71400
0
0
67365
11700
55
6,5
Точное
82740
62760 33060
3615
83160
235
183,5
Алгоритм 2.1
0
0
0
1
0
0
76200
66300 37500
3855
84600
240
6,5
Алгоритм 2.2
116700 34 500
9300
5955
60000
190
7
Точное
86940
15180
1620
60165 10800
55
73,15
Алгоритм 2.1
0
0
0
0
1
0
87600
42600 12600 47355 23 700
130
6
Алгоритм 2.2
81300
17100
0
60105 11700
60
6,5
Точное
80460
13860
5700
49209
25140
50
250,3
Алгоритм 2.1
0
0
0
0
0
1
73500
41700 30000 31200
52500
125
5,65
Алгоритм 2.2
73800
18000
6300
49815
27900
55
6,25
мо приводит к тому, что большинство грузов (для решений по алгоритмам 1
и 2.2) прибывает в вершины назначения в рамках горизонта планирования.
Отдельно следует отметить, что время работы алгоритмов существенно
зависит не только от размера матрицы ограничений, но и от ее содержи-
мого. Так, например, иногда некоторый набор ограничений может быть вы-
черкнут из матрицы ограничений в силу их избыточности. В таком случае
размерность задачи снизится. Однако ввиду большого количества входных
данных априорно высказать предположение о количестве таких исключений
и (не)большом времени счета алгоритмов представляется затруднительным.
Все численные эксперименты проводились при помощи математического
пакета ILOG CPLEX 12.5.1 на персональном компьютере (Intel Core i5 4690,
3.5 GHz, 8 GB DDR3 RAM).
7. Заключение
В настоящей работе была сформулирована задача формирования распи-
сания в общей постановке. С этой целью была предложена новая математи-
ческая модель движения по мультиграфу транспортной сети, задающаяся в
виде системы линейных ограничений. Был предложен универсальный крите-
рий оптимизации, позволяющий при различных значениях параметров полу-
чать важные прикладные задачи, например, задачу минимизации стоимости
перевозок или же задачу максимизации количества доставленных в рамках
163
горизонта планирования грузов. В работе были предложены алгоритмы для
поиска приближенного решения в поставленной задаче. Основной идеей этих
алгоритмов является декомпозиция задачи путем поиска расписания после-
довательно для некоторых групп грузов. Использование такой декомпозиции
не всегда приводит к точному или хотя бы допустимому решению. Однако
благодаря декомпозиции в ряде задач с порядка 1-1,5 млн бинарных пере-
менных оказалось возможным за относительно небольшое время находить
допустимое решение с точностью в некоторых случаях 5-10%. Отличитель-
ной чертой предложенной модели движения по мультиграфу транспортной
сети является то, что допускается прибытие грузов и после горизонта плани-
рования, если прогнозируется, что доставка будет выполнена вовремя. Дан-
ное обстоятельство открывает путь к еще одной декомпозиции — по дробле-
нию горизонта планирования. А именно горизонт планирования можно рас-
щепить на несколько частей и искать расписание движения грузов после-
довательно на каждой части горизонта планирования. Такая декомпозиция
должна позволить формирование расписания для еще большего количества
грузов/транспортировок при фиксированном времени счета.
СПИСОК ЛИТЕРАТУРЫ
1.
Mor A., Speranza M.G. Vehicle routing problems over time: a survey // Quart. J.
Oper. Res. 2020. V. 18. No. 2. P. 129-149.
2.
Vidal T., Crainic T.G., et. al. A unified solution framework for multi-attribute
vehicle routing problems // Eur. J. Oper. Res. 2014. V. 234. No. 3. P. 658-673.
3.
Boctor F.F., Laporte G., Renaud J. Heuristics for the traveling purchaser problem //
Comput. Oper. Res. 2003. V. 30. No. 4. P. 491-504.
4.
Cacchiani V., Caprara A., Toth P. A column generation approach to train
timetabling on a corridor // 4OR. 2008. V. 6. No. 2. P. 125-142.
5.
Gao Yu., Kroon L., et. al. Three-stage optimization method for the problem of
scheduling additional trains on a high-speed rail corridor // Omega. 2018. V. 80.
P. 175-191.
6.
Mu S., Dessouky M. Scheduling freight trains traveling on complex networks //
Transport. Res. Part B: Methodologic. 2011. V. 45. No. 7. P. 1103-1123.
7.
Forsgren M., Aronsson M., Gestrelius S. Maintaining tracks and traffic flow at the
same time // J. Rail Transport Planning Management. 2013. V. 3. No. 3. P. 111-123.
8.
Sama M., D’Ariano A., et. al. A variable neighbourhood search for fast train
scheduling and routing during disturbed railway traffic situations // Comput. Oper.
Res. 2017. V. 78. P. 480-499.
9.
Meng L., Zhou X. Simultaneous train rerouting and rescheduling on an N-track
network: A model reformulation with network-based cumulative flow variables //
Transport. Res. Part B: Methodologic. 2014. V. 67. P. 208-234.
10.
Lazarev A.A., Musatova E.G. The problem of trains formation and scheduling:
Integer statements // Autom. Remote Control. 2013. V. 74. No. 12. P. 2064-2068.
11.
Архипов Д.И., Лазарев А.А. Минимизация максимального взвешенного времен-
ного смещения доставки заказов между двумя железнодорожными станциями //
АиТ. 2016. № 12. С. 3-25.
164
Arkhipov D.I., Lazarev A.A. Minimizing the maximal weighted lateness of delivering
orders between two railroad stations // Autom. Remote Control. 2016. V. 77. No. 12.
P. 2091-2109.
12. Буянов М.В., Иванов С.В. и др. Развитие математической модели управления
грузоперевозками на участке железнодорожной сети с учетом случайных фак-
торов // Информатика и ее применения. 2017. Т. 11. № 4. С. 85-93.
13. Буянов М.В., Наумов А.В. Оптимизация функционирования подвижного соста-
ва при организации грузовых перевозок на участке железнодорожной сети //
АиТ. 2018. № 9. С. 143-158.
Buyanov M.V., Naumov A.V. Optimizing the Operation of Rolling Stock in
Organizing Cargo Transportation at a Railway Network Segment // Autom. Remote
Control. 2018. V. 79. No. 9. P. 1661-1672.
14. Гайнанов Д.Н., Игнатов А.Н. и др. О задаче назначения “технологического ок-
на” на участках железнодорожной сети // АиТ. 2020. № 6. С. 3-16.
Gainanov D.N., Ignatov A.N., et al. On track procession assignment problem at the
railway network sections // Autom. Remote Control. 2020. V. 81. No. 6. P. 967-977.
15. Ignatov A.N. On the scheduling problem of cargo transportation on a railway network
segment and algorithms for its solution // Bull. South Ural State Univer. Ser. Mat.
Model. Progr. 2021. V. 14. No. 3. P. 61-76.
16. Босов А.В., Игнатов А.Н., Наумов А.В. Алгоритмы приближенного решения
задачи назначения «технологического окна» на участках железнодорожной се-
ти // Информатика и ее применения. 2021. Т. 15. № 4. С. 3-11.
Статья представлена к публикации членом редколлегии А.А. Лазаревым.
Поступила в редакцию 29.03.2022
После доработки 25.11.2022
Принята к публикации 30.11.2022
165