Автоматика и телемеханика, № 7, 2023
Управление в технических системах
© 2023 г. Ю.Г. БУЛЫЧЕВ, д-р техн. наук (profbulychev@yandex.ru)
(АО «Концерн Радиоэлектронные технологии», Москва),
А.А. МОЗОЛЬ, канд. техн. наук (amozol@bk.ru)
(АО «ВНИИ «Градиент», Ростов-на-Дону)
ПЕРИОДО-ВРЕМЕННОЙ МЕТОД ПАРАМЕТРИЧЕСКОЙ
ИДЕНТИФИКАЦИИ ДЛЯ РЕШЕНИЯ
ЛОКАЦИОННЫХ И НАВИГАЦИОННЫХ ЗАДАЧ
Применительно к локационным и навигационным задачам для однопо-
зиционного пассивного наблюдателя развит беспеленговый метод иден-
тификации параметров полиномиальной модели движения объекта с уче-
том эволюции невязки между периодическим излученным и принятым
квазипериодическим сигналом. Рассматривается прохождение сигнала в
произвольной физической среде, при этом не требуются знание периода
излученного сигнала и традиционное оценивание текущей частоты До-
плера, вызывающей невязку. Метод основан на подсчете числа периодов
принимаемого сигнала в заданном интервале наблюдения. Рассмотрены
вопросы, связанные с анализом возникающей невязки, наблюдаемостью
метода и его точностными характеристиками. Даны полезные практиче-
ские рекомендации и иллюстративный пример.
Ключевые слова: излучающая цель, периодический сигнал, квазиперио-
дический сигнал, однопозиционный пассивный наблюдатель, беспеленго-
вый метод, временная невязка, периодо-временной метод, полиномиаль-
ное движение, параметрическая идентификация, наблюдаемость метода,
корреляционная матрица ошибок оценивания, адаптация.
DOI: 10.31857/S0005231023070048, EDN: FCTVPA
1. Введение
Методы пассивной локации и навигации излучающей цели на базе одно-
позиционного пассивного наблюдателя широко отражены в известной лите-
ратуре (см., например, [1-20]). Среди них весьма популярны доплеровско-
временные беспеленговые методы, оперирующие с периодическими сигнала-
ми и ориентированные на возможность измерения непрерывного смещения
доплеровской частоты принимаемого сигнала в точке наблюдения, обуслов-
ленного движением цели (для задач локации) или движением наблюдате-
ля (для задач навигации); в [6] на стр. 169-173 дан исчерпывающий список
литературы по данному вопросу, доступной в открытой печати. При этом
измерения могут осуществляться на любой характерной частоте из спектра
66
излучаемого периодического сигнала (например, на центральной) либо моду-
лирующей функции, а также путем сопоставления моментов прихода фрон-
тов последовательных импульсов с учетом известного периода. Указанные
методы основаны на идее «синтеза базы», что приводит в конечном итоге
к формированию нескольких точек наблюдения на траектории движения и
возможности использования известных методов многопозиционной локации
и навигации (например, триангуляционного, разностно-дальномерного, три-
латерационного и их комбинаций [21, 22]). При этом, как правило, рассмат-
риваются такие траектории, которые на участке наблюдения либо извест-
ны (например, орбитальные с известными параметрами движения), либо с
достаточной для практики точностью аппроксимируются моделью прямоли-
нейного равномерного движения (как с известными, так и неизвестными па-
раметрами движения). При этом принципиальным моментом является учет
априорной информации о величине скорости цели или наблюдателя, что для
практики зачастую является неприемлемым.
В [20] развивается периодо-временной метод (ПВМ), который снимает
ограничение, связанное с получением априорной информации о величине
скорости, а также рассматривается вопрос параметрической идентификации
применительно к модели криволинейного движения, учитывающего возмож-
ный маневр цели или наблюдателя. При этом не требуется предварительная
текущая оценка доплеровской частоты, что эквивалентно нахождению произ-
водной от временной невязки между периодами излучаемого (периодическо-
го) и принимаемого (квазипериодического) сигналов. Однако результаты, по-
лученные в [20], распространяются лишь на радиосигналы (распространяю-
щиеся в виде электромагнитной волны со скоростью света) с известным пе-
риодом, а также не исследована зависимость возникающей временной невяз-
ки от параметров движения цели. Настоящая статья является дальнейшим
развитием известного ПВМ в части устранения указанных недостатков при-
менительно к сигналам, распространяющимся в произвольных физических
средах. Не снижая общности рассуждений, а также с целью компактного опи-
сания предлагаемого метода ограничимся решением задачи пассивной лока-
ции излучающей цели (ИЦ) на базе стационарного однопозиционного пассив-
ного наблюдателя (СОПН). Применение полученных результатов к решению
задачи навигации не вызовет принципиальных затруднений.
2. Постановка задачи
Пусть движущаяся ИЦ формирует в текущем времени t периодический
сигнал S0(t) (период сигнала TS = const может быть неизвестным), распро-
страняющийся в заданной физической среде в виде волны со скоростью vS
(речь может идти о различных волнах, например электромагнитных или аку-
стических). В точке наблюдения, связанной с СОПН, на интервале наблюде-
ния [0, T ] принимается квазидетерминированный сигнал S(t) с переменным
периодом.
67
Согласно ПВМ отрезок наблюдения представляется в виде
⋃
(2.1)
[0, T ] =
[tn-1, tn] , tn > tn-1, t0 = 0, tN
≤T,
n=1
где t0 = 0 — фиксированный момент времени, соответствующий началу при-
нимаемого сигнала (например, поступлению первого импульса), tn — фикси-
∑n
рованный момент времени поступления Mn =
ΔMp периодов принимае-
p=1
мого квазипериодического сигнала (ΔMp - количество периодов, подсчиты-
ваемых на отрезке [tp-1, tp]), при этом в момент времени tn число Mn периодов
целиком укладывается в отрезок [0, tn].
Теоретические и практические вопросы, связанные с подсчетом указанных
периодов, решаются с использованием электронных цифровых частотомеров
и подробно изложены в известной технической литературе (см., например,
[23, стр. 148-161]).
В точке наблюдения (где расположен СОПН) с учетом движения ИЦ сиг-
нал становится квазипериодическим, поскольку возникает временная невяз-
ка δ(t) между периодами излученного и принятого сигналов
(2.2)
δ(t) = v-1SΔR(t) = v-1S [R(t) - R0
],
t ∈ [0,T],
где R(t) — текущая дальность до ИЦ, R0 = R(0) — начальная дальность.
В прямоугольной декартовой системе координат XY Z (в центре которой
находится СОПН) движение ИЦ описывается полиномиальной моделью (для
упрощения выкладок и наглядности метода вместо обобщенного конечного
полинома с произвольными базисными функциями ограничимся степенным
полиномом второй степени с начальным условием r0 = r (0), ∥r0∥ = R0)
(2.3)
r(t) = r0 + v0t + 2-1a0t2
,
t ∈ [0,T],
где r(t) = r = [x, y, z]T — вектор положения (∥r(t)∥ = R(t)),
v0 = [vx0,vy0,vz0]T — вектор начальной скорости (v0 = ∥v0∥ — величина
скорости),
a0 = [ax0,ay0,az0]T — вектор ускорения (a0 = ∥a0∥ — величина ускоре-
ния), при этом векторы r0, v0 и a0 априорно неизвестны.
Если в качестве измеряемого параметра принять величину tn, то можно
воспользоваться следующим векторным уравнением наблюдения:
(2.4)
h=t+ξ=t
+ δ + ξ,
где
[
]T
[
]T
h=
hn,n = 1,N
,
t=
tn,n = 1,N
,
t=
[tn,n = 1,N]T ,
[
]T
[
]T
δ=
δn,n = 1,N
,
ξ=
ξn,n = 1,N
,
hn = h(tn), ξn = ξ(tn) .
[
]T
В (2.4) под ξ =
ξn,n = 1,N
понимается гауссовская погрешность из-
мерений с нулевым математическим ожиданием и корреляционной матри-
68
цей Kξ, а измеряемый параметр tn связан с числом подсчитываемых периодов
соотношением
(2.5)
tn = MnTS + δn = tn + δn = tn + v-1S [Rn - R0
],
где δn = δ(tn) — неизвестная временная невязка, tn = MnTS , Rn = R (tn),
t0 = 0.
Формулу (2.5) можно прокомментировать так (см., например, [6, стр. 154]):
за время tn = MnTS дальность между ИЦ и СОПН изменится на величину
ΔRn = Rn - R0, что соответствует временной невязке δn = v-1SΔRn между
периодами излученного и принятого сигналов. Если бы цель была стацио-
нарной или двигалась по окружности (в центре которой находится СОПН),
то приращение дальности отсутствовало бы и δn = 0 для всех n. Именно про-
хождение волной дополнительного участка пути длиной ΔRn со скоростью
vS является причиной возникновения невязки δn.
Напомним, что при известном периоде TS в качестве измеряемого парамет-
ра можно было принять величину δn = tn - MnTS (именно так формирова-
лось уравнение наблюдения в [6, 20]), при неизвестном периоде TS доступны
для измерения только величины tn и Mn.
Если расстояние между ИЦ и СОПН уменьшается, то δn < 0, в против-
ном случае δn > 0. Появление временной невязки δn = δ(tn) обусловлено эф-
фектом сжатия или растяжения исходного периодического сигнала в точке
наблюдения за счет движения ИЦ.
Требуется с учетом (2.1)-(2.5) разработать метод параметрической иден-
тификации ИЦ с криволинейным (полиномиальным) движением на базе
периодо-временного СОПН, не требующий знания периода TS излучаемого
сигнала и вычисления текущей частоты Доплера. Метод должен включать в
себя решение следующих вопросов:
— получение зависимостей, позволяющих оценить характер эволюции пе-
риода принимаемого сигнала (обусловленную движением ИЦ), что является
принципиальным для данного метода;
— формирование алгоритма идентификации наклонной дальности и ряда
характерных параметров движения ИЦ на точных данных (принимая ξn = 0,
n = 1,N);
— определение условий корректного применения метода на точных данных
(т.е. определение условий наблюдаемости метода);
— учет случайных погрешностей измерений;
— решение задачи идентификации на избыточных данных (h) с учетом
шумов измерений (задача сглаживания на основе метода наименьших квад-
ратов (МНК)) и получение соотношения для расчета корреляционной матри-
цы ошибок идентификации;
— проведение вычислительного эксперимента с целью демонстрации воз-
можностей метода.
69
3. Исследование эволюции периода сигнала
Набег δ(t) описывается выражением (для случая прямолинейного равно-
мерного движения)
}
{[
]1/2
(3.1)
δ(t) = v-1S R20 + 2tR0v0 cos γ0 + t2v20
-R0
,
t ≥ 0, δ(0) = 0,
где γ0 — угол между векторами r0 и v0.
При 0 < γ0 ≤ π/2 функция δ(t) является неотрицательной, гладкой и стро-
го выпуклой, δ(1)(t) = dδ(t)/dt = 0 в точке t = 0. При π/2 < γ0 < π функ-
ция δ(t) является гладкой и строго выпуклой, имеет два корня (t = 0 и
t = -2R0 cosγ0/v0), в точке t = -R0 cosγ0/v0 достигает минимального значе-
ния (v-1SR0 (sin γ0 - 1)). При γ0 = 0 имеем δ(t) = (v0/vS ) t, т.е. набег является
линейной неотрицательной функцией, не зависящей от R0. При γ0 = π имеем
δ(t) = - (v0/vS ) t для 0 ≤ t ≤ R0/v0, т.е. δ(t) является линейной функцией и
достигает своего минимума (-R0/vS ) в точке t = R0/v0. Поскольку при γ0 = 0
и γ0 = π набег δ(t) не зависит от R0, то для этих некорректных случаев, свя-
занных с движением ИЦ вдоль линии визирования, определение дальности с
учетом эволюции периода сигнала в точке наблюдения невозможно.
Для более детального исследования δ(t) найдем несколько первых произ-
водных по времени (в точке t = 0):
⎧
⎪
δ(1)0 = v-1SvR,
⎨
(2)
(3.2)
δ
= (vS R0)-1 v2τ,
⎪
0
⎩
(
)
δ(3)0 = -3
vSR20
−1 v2τvR,
где vR = R0 cos γ0 и vτ = v0 sin γ0 — соответственно величины радиальной и
тангенциальной скорости.
В итоге можно воспользоваться разложением на основе ряда Тейлора
(
)
v2τt
v2τvRt2
δ(t) = v-1St vR +
-
+...
=
2R0
2R2
0
(3.3)
[
(
)
]
v2τt
vRt
=v-1St vR +
1-
+... ,
2R0
R0
из которого следует, что спектральный состав функции δ(t) существенно за-
висит от условий наблюдения, и во многих практически важных случаях не
удается пренебречь производными второго и более высоких порядков, осо-
бенно для больших интервалов наблюдения и малых дальностей.
Формулы (3.1)-(3.3) весьма полезны при обосновании возможности прак-
тической реализации развиваемого ПВМ в каждом конкретном случае с уче-
том принятых исходных данных.
70
4. Построение алгоритма параметрической идентификации
на точных данных
С учетом (2.3) можно воспользоваться следующей зависимостью
(
)
(4.1)
R2(t) - R20 = 2t〈r0,v0〉 + t2
v20 + 〈r0,a0〉
+ t3 〈v0,a0〉 + 4-1t4a20,
где 〈·, ·〉 — символ скалярного произведения двух векторов, ∥·∥ — символ
нормы вектора.
Формула (4.1) представляет собой первое базовое соотношение развивае-
мого ПВМ.
Второе базовое соотношение следует непосредственно из формулы (2.2):
(4.2)
R2(t) - R20 = 2vSR0δ(t) + v2Sδ2
(t).
Приравнивая выражения (4.1) и (4.2), после несложных преобразований
получаем уравнение
(4.3)
-2vS δ(t)χ1 + 2tχ2 + t2χ3 + t3χ4 + 4-1t4χ5 = v2S δ2
(t),
где
⎧
⎪
χ1 = R0,
⎪
⎪
⎪
χ2 = 〈r0,v0〉 ,
⎨
(
)
(4.4)
χ3 =
v20 + 〈r0,a0〉
,
⎪
⎪
⎪
χ4 = 〈v0,a0〉,
⎪
⎩ χ5 =a20
— неизвестные коэффициенты, имеющие понятный физический смысл и под-
лежащие идентификации.
Поскольку величины δn неизвестны, то с учетом (2.5) для дискретного вре-
мени запишем уравнение относительно неизвестных величин TS и χi, i = 1, 5:
-2vS (tn - MnTS ) χ1 + 2tnχ2 + t2nχ3 + t3nχ4 + 4-1t4nχ5 =
(4.5)
= v2S [(tn - MnTS)]2 .
После несложных, но громоздких преобразований формулу (4.5) можно
представить в виде нового уравнения (относительно коэффициентов Ai)
∑
(4.6)
BinAi = Dn,
i=1
71
где
⎧
⎪
A1 = (vSχ1 - χ2)v-2ST-1S, A2 = -χ1v-1S,
⎪
(
)(
)-1
⎪
⎪
A3 =
v2S - χ3
2v2S TS
,
A4 = 2-1TS,
⎨
(
A5 = -χ4
2TS v2S
)-1 , A6 = χ5 (8TS v2S)-1 ,
(4.7)
⎪
B1n = tn, B2n = Mn, B3n = t2n,
⎪
⎪
⎪
B4n = M2n, B5n = t3n, B6n = t4n,
⎩
Dn = Mntn.
Соотношения (4.6) и (4.7) являются основой для идентификации пара-
метров криволинейного движения ИЦ при неизвестном периоде излучаемого
сигнала. В (4.6) неизвестными являются коэффициенты Ai, i = 1, 6, кото-
рые однозначно связаны с искомыми параметрами движения ИЦ и перио-
дом излучаемого сигнала. Если уравнение (4.6) записать для всех n = 1, N,
где N ≥ 6, то получим систему линейных алгебраических уравнений (СЛАУ)
(с прямоугольной матрицей B)
(4.8)
BA = D,
[
]
[
]T
[
]T
где B =
Bin,n = 1,N,i = 1,6
, A=
ai,i = 1,6
,D=
Dn,n = 1,N
Данная СЛАУ позволяет решать задачу оценивания указанных коэффи-
циентов и параметров, а также периода сигнала при избыточных измерениях.
При N > 6 речь идет о задаче сглаживания на основе МНК с использованием
ортогонально-сингулярного разложения [24].
Рассмотрим частный случай, когда ИЦ движется прямолинейно и равно-
мерно, а период сигнала неизвестен. Теперь вместо (4.3) имеем уравнение
(4.9)
-2vS δ(t)χ1 + 2tχ2 + t2χ3 = v2Sδ2
(t),
где
⎧
⎨ χ1 = R0,
(4.10)
χ2 = 〈r0,v0〉,
⎩
χ3 = v20.
При этом вместо (4.6) в этом случае имеем
(4.11)
tnA1 + MnA2 + t2nA3 + M2nA4 = Mntn.
Если предположить, что период сигнала известен, т.е. известны величи-
ны δn, то с учетом (4.9) для нахождения параметров прямолинейного равно-
мерного движения ИЦ достаточно решить СЛАУ (относительно χi, i = 1, 3)
(4.12)
-2vS δnχ1 + 2tnχ2 + t2χ3 = v2S δ2n,
n = 1,N.
72
При этом находим дальность R0, величину скорости v0 = ∥v0∥ и угол γ0 меж-
ду векторами r0 и v0 с учетом очевидных соотношений:
⎧
⎪
R0 = χ1,
⎨
v0 =
√χ3,
(4.13)
⎪
[
]
⎩ γ0 = arccos χ2 (R0v0)-1
В случае прямолинейного равноускоренного движения ИЦ (когда векторы
v0 и a0 являются коллинеарными) необходимо решить СЛАУ (относитель-
но χi, i = 1, 5)
(4.14)
-2vS δnχ1 + 2tnχ2 + t2nχ3 + t3nχ4 + 4-1t4nχ5 = v2S δ2n.
Теперь имеем:
⎧
⎪
χ1 = R0,
⎪
⎪
χ2 = R0v0 cos γ0,
⎨
(
)
(4.15)
χ3 =
v20 + R0a0 cos γ0
,
⎪
⎪
χ4 = v0a0,
⎪
⎩ χ5 =a20.
По найденным значениям χ1, . . . , χ5 вычисляем следующие параметры
движения ИЦ:
⎧
⎪
R0 = χ1,
⎪
⎨
a0 =
√χ5,
(4.16)
⎪
v0 = χ4a-10,
⎪
[
]
⎩ γ0 = arccos χ2 (R0v0)-1
Выражения (4.1)-(4.16) составляют математическую основу развиваемого
ПВМ.
В следующем разделе проанализируем условия наблюдаемости развивае-
мого метода, т.е. выявим ситуации, при которых он становится некорректным
с вычислительной точки зрения.
5. Анализ наблюдаемости метода
Развиваемый ПВМ можно реализовать на любом наборе узлов из мно-
жества {t1, . . . , tN }, что позволяет не только уменьшить объем вычислений,
но и в ряде случаев повысить надежность формируемых оценок (особенно
при отсутствии достоверной априорной информации о весовых коэффициен-
тах, необходимых для реализации МНК). Для этого введем векторы времен-
[
]T
ных узлов t[l] =
t[l]p,p = 1,P[l]
, где l = 1, L, t[l]p ∈ {t1, . . . , tN }, t[l]p+1 > t[l]p.
73
Здесь L — число наборов, P[l] — количество узлов в l-м наборе, t[l]p - узел с
номером [l] p (это натуральное число, принадлежащее множеству {1, . . . , N}).
На основе (4.12) сформируем следующую СЛАУ:
(5.1)
C[l]χ[l] = Y[l],
[
]T
[
где Y[l] = δ2[l]p, p = 1, P[l]
, χ[l] =
χi[l],i = 1,5]T , а матрица C[l] (разме-
(
)
ром P[l] × 5) образована строками v-2S -2vS δ[l]p, 2t[l]p, t2[l]p, t3[l]p, 4-1t4
,p=
[l]p
= 1, P[l].
Введение t[l] позволяет с учетом геометрии наблюдения, характеристик
ИЦ и СОПН находить такие наборы узлов, на которых вопрос идентифика-
ции решается наиболее качественно (это относится к известной задаче пла-
нирования эксперимента [25]).
Не снижая общности рассуждений, ограничимся плоским случаем (при-
нимая z = 0) и сигналом с известным периодом, а также зададимся P[l] = 5,
что соответствует квадратной матрице C[l]. Очевидно, что для корректного
применения развиваемого метода, связанного с решением СЛАУ (5.1), необхо-
димо и достаточно выполнение условия det C[l] = 0, что приводит к искомому
результату χ[l] = C-1[l]Y[l]. Для выявления случаев, при которых это условие
нарушается, запишем столбцы матрицы C[l] в виде векторов:
[
]T
[
]T
C[l]1 =
-2vS δ[l]p, p = 1, 5
,
C[l]2 =
2t[l]p, p = 1, 5
,
[
]T
[
]T
[
]T
C[l]3 = t2[l]p,p = 1,5
,
C[l]4 = t3[l]p,p = 1,5
,
C[l]5 =
4-1t4[l]p, p = 1, 5
Несложно заметить, что столбцы C[l]2, C[l]3 и C[l]4 линейно независимы, сле-
довательно, для проверки условия det C[l] = 0 достаточно показать, что стол-
бец C[l]1 не может быть представлен в виде линейной комбинации этих столб-
цов.
[
]-2 (
(
(
)
Так как R[l]p = x2[l]p + y2[l]p
где R[l]p = R
t[l]p
, x2[l]p = x0 +vx0t[l]p+
)2
(
)2 )
+2-1ax0t2[l]p
и y2[l]p = y0 +vy0t[l]p +2-1ay0t2[l]p
, то нарушение усло-
[
]T
вия det C[l] = 0 эквивалентно тому, что векторы μ[l] = x2[l]p, p = 1, 5
и
[
]T
η[l] = y2[l]p,p = 1,5
не связаны условием коллинеарности: μ[l] = kη[l], где
k — коэффициент пропорциональности. В противном случае имеем
[
]-2
[
]-2
y
(5.2)
R[l]p = x2[l]p + y2[l]p
= k2y2[l]p + y2[l]p
=q
[l]p
,
[
]
[
]
(5.3)
−2vS δ[l]p = -2
R[l]p - R0
= -2
q
y[l]p
- R0
,
(
)-2
где q =
k2 + 1
Из (5.2) и (5.3) следует, что координаты вектора C[l]1 можно представить
линейной комбинацией из координат векторов C[l]2, C[l]3 и C[l]4. Физический
74
смысл условия μ[l] = kη[l] (условие вычислительной некорректности метода)
состоит в том, что ИЦ движется прямолинейно вдоль линии визирования
СОПН.
Таким образом, для корректности метода необходимо исключить случаи,
когда ИЦ движется вдоль указанной линии или в ее окрестности. Это накла-
дывает определенные ограничения на условия наблюдения ИЦ, что необхо-
димо предусмотреть на практике.
Если ограничиться моделью(прямолинейного равномерного движения и
сигналом с известным периодом в этом случае в (5.1) надо положить p = 1, 3
)
[
]T
иt[l] =
t[l]1,t[l]2,t[l]3
, то решение СЛАУ (5.1) при корректном применении
метода позволяет определить искомые параметры движения ИЦ
⎧
(
)
δ2[l]1Δt[l]23 - δ2[l]2Δt[l]13 + δ2[l]3Δt[l]12
⎪
⎪
R0[l] = 2-1vS
,
⎪
-δ[l]1Δt[l]23 + δ[l]2Δt[l]13 - δ[l]3Δt
⎪
[l]12
⎪
(
)
⎪
⎪
t2[l]1Δδ[l]23 - t2[l]2Δδ[l]13 + t2[l]3Δδ[l]12
⎪
〈r0,v0〉[l] = 2-1v2
,
⎨
S
-δ[l]1Δt[l]23 + δ[l]2Δt[l]13 - δ[l]3Δt
[l]12
(5.4)
[
]1/2
⎪
t[l]3Δδ[l]12 - t[l]2Δδ[l]13 + t[l]1Δδ[l]23
⎪
⎪
v0[l] =
,
⎪
δ[l]1Δt[l]23 - δ[l]2Δt[l]13 + δ[l]3Δt
⎪
[l]12
⎪
[
]
⎪
⎪
〈r0,v0〉[l]
⎩ γ0[l] = arccos
,
R0[l]v0[l]
(
)
(
)
где Δt[l]12 = t[l]1t[l]2
t[l]1 - t[l]2
, Δδ[l]12 =δ[l]1δ[l]2
δ[l]1 - δ[l]2
и, если не учиты-
вать ошибки измерений и вычислений, R0[l] = R0, v0[l] = v0, 〈r0, v0〉[l] = 〈r0, v0〉,
γ0[l] = γ0.
Следователь
(
[
])
ния R0, v0 и γ0 где R0 = χ1, v0 =
√χ3, γ0 = arccos χ2 (R0v0)-1
, не прибе-
гая к численному решению СЛАУ, что является несомненным достоинством
развиваемого ПВМ.
6. Учет случайных погрешностей измерений
Полагая период сигнала известным, для оценки влияния случайных по-
грешностей измерений ξ на точностные характеристики метода восполь-
зуемся традиционной процедурой расчета элементов корреляционной мат-
рицы Kχ[l] ошибок оценивания координат вектора χ в линейном при-
ближении [26]. Для этого с учетом СЛАУ (5.1) (полагая для простоты
матрицу C[l] квадратной размером 5 × 5) воспользуемся представлением
[
(
)
]T
[
]T
χ[l] = C-1[l]Y[l] =
χk
δ[l]
,k = 1,5
(где δ[l] =
δ[l]p,p = 1,5
) и частными
(
)
производными следующего вида: ∂χk[l]
δ[l]
/∂δ[l]p. Корреляционная матри-
75
ца находится по правилу
(6.1)
Kχ[l] = Fχ[l]KξFTχ[l],
[
(
)
]
где Fχ[l] =
∂χk[l]
δ[l]
/∂δ[l]p, k = 1, 5, p = 1, 5
Выражение (6.1) позволяет априорно на математических ожиданиях изме-
ряемых параметров оценить потенциальные возможности развиваемого ПВМ
и выработать практические рекомендации для его наилучшего использования
при конкретных условиях наблюдения ИЦ, а также обоснованно подходить
к выбору основных параметров метода (длины интервала наблюдения (T ),
количества узлов (N) и временных наборов (t[l]) ). Так, номер l∗ ∈ {1, . . . , L}
оптимального набора δ[l∗], обеспечивающего минимизацию ошибки оценива-
ния, находится по следующему адаптивному правилу:
(6.2)
l∗ = arg min
Kχ[l],
l
где
Kχ[l]
— любая из норм матрицы Kχ[l], применяемая в задачах оценива-
ния.
При практической реализации развиваемого ПВМ следует учитывать тот
фактор, что при больших значениях vS (например, когда vS = c, где c —
скорость света) решение квадратной СЛАУ (4.8) при наличии случайных по-
грешностей измерений может приводить к некорректным результатам. Пояс-
ним этот факт для случая N = 6 на примере вычисления скорости v0. По-
скольку v0 = c√1 - 2TSA3, то ошибка Δ3 =Aˆ3 - A3 (где Aˆ3 - вычисленное
значение коэффициента A3 путем решения СЛАУ (4.8) с учетом ошибок из-
√
мерений) приводит к следующей оценке скорости: v0 =
v20 + 2c2TSΔ3. Тo
есть корректная оценка скорости возможна лишь при выполнении условия
(
)-1
Δ3 > -v20
2c2TS
, что накладывает очень жесткое ограничение на величи-
ну погрешности Δ3. Данный эффект относится также ко всем коэффициен-
там СЛАУ (4.8), кроме A2 иA4.
Для преодоления указанной некорректности (при больших скоростях vS)
рекомендуется двухэтапный подход к идентификации. На первом этапе ре-
шается СЛАУ (4.8), из которой потребуются лишь оценка
A4 для A4. Это
позволяет сформировать искомую оценк
TS =
A4 для периода TS, а на ее
основе и оценки для невязокδn = tn - Mn
TS. Все оценки параметров движе-
ния ИЦ находятся на базе СЛАУ (5.1), в которую вместо δn подставляется
величинаδn.
7. Учет избыточных измерений
Теперь рассмотрим случай избыточных измерений, когда матрица C[l]
и вектор Y[l] в (5.1) имеют произвольное число строк P[l] ≤ N, которое,
как правило, значительно превышает количество оцениваемых параметров.
Для упрощения расчетов будем рассматривать в СЛАУ (5.1) составляющую
76
[
]T
Y[l] =
v2Sδ2[l]p,p = 1,P[l]
в качестве вектора вторичных измеряемых пара-
метров, а первичные измерения h[l]1, . . . , h
полагаем некоррелированны-
[l]P[l]
ми. С учетом этого по аналогии с (5.1) корреляционную матрицу ошибок
измерений координат вектора Y[l] можно представить так
(7.1)
KY[l] = Fδ[l]KξFTδ[l].
В предположении, что матрица Kξ является диагональной, имеем[
]
KY[l] = diag 4δ2[l]1, 4δ2[l]2, . . . , 4δ2
. При условии достаточно малых ошибок
[l]P[l]
измерений для построения сглаженной оценки χ∗[l] вектора χ можно восполь-
зоваться методом наименьших квадратов [25]
(
)-1
(7.2)
χ∗[l] = CT[l]K-1Y[l]C[l]
CT[l]K-1Y[l]hY[l],
[
]T
где hY[l] =
hY[l]p,p = 1,P[l]
— вектор вторичных измерений.
Корреляционную матрицу ошибок оценивания находим так:
(
)-1
(7.3)
Kχ∗
= CT[l]K-1Y[l]C[l]
[l]
Для выбора оптимального набора с номером l∗ ∈ {1, . . . , L} применяем
адаптивный алгоритм типа (6.2).
Следует отметить, что подход (7.1)-(7.3) не является строго оптимальным,
поскольку элементы матрицы C[l] зависят от результатов наблюдений. Но
при определенных ограничениях на погрешности измерений он дает вполне
приемлемый результат.
Для более точного сглаживания можно использовать известные процеду-
ры нелинейного оптимального оценивания, которые приводят на практике к
трудоемким рекуррентным вычислительным алгоритмам, предполагающим
задание достаточно качественного начального условия.
Другой наиболее простой и достаточно надежный способ построения сгла-
женной оценки χ∗[l] состоит в предварительном сглаживании первичных изме-
рений h[l]1, . . . , h[l]P[l] соответствующим полиномом δ∗[l](t) и применении полу-
ченных результатов к решению СЛАУ (5.1). Кроме того, можно найти сгла-
женную оценку дальности для любого t ∈ [0, T ], а именно,
(7.4)
R[l](t) = R∗0[l] + cδ∗[l]
(t).
Здесь в качестве оптимального принимаем набор с номером l = l∗ ∈
∈ {1,... ,L}.
8. Некоторые обобщения и практические рекомендации
Выше рассматривался случай оценивания начальной дальности R0 = R (0)
для момента времени t = 0. Однако если ряд Тейлора, используемый для
77
описания криволинейного движения ИЦ, записать относительно не началь-
ного, а любого произвольного t = t∗ ∈ [0, T ], то по аналогии с вышеизложен-
ным можно решить задачу идентификации именно для момента времени t∗,
в частности найти дальность R∗ = R (t∗).
Развитый метод несложно реализовать в виде следующих алгоритмов: по
выборке нарастающего объема, на «скользящей сетке» или в виде филь-
тра [25]. При этом движение ИЦ на интервале наблюдения можно рассматри-
вать как кусочно-полиномиальное (в [20] оно рассматривалось как кусочно-
линейное).
При практической реализации метода возникают вопросы (например, вы-
бор степени полинома, описывающего движение ИЦ или количества подсчи-
тываемых импульсов), связанные с организацией измерительного экспери-
мента. В [25] даются практические рекомендации для решения этих вопросов
в полном объеме. Очевидно, что развиваемый метод наиболее эффективен в
случае, когда речь идет о больших пройденных расстояниях (т.е. «синтези-
руется база» достаточного размера), а это задает определенные ограничения
на тип ИЦ (в частности на его скорость, на возможности маневра и т.д.), на
адекватность используемого полинома на заданном интервале наблюдения
и на технические характеристики СОПН.
Для случаев, связанных с движением ИЦ по линии визирования, можно
предложить гибридный вариант использования развитого и известного энер-
гетического метода [27]. Доказано, что данный метод, оперирующий с отно-
сительным уровнем принимаемого сигнала, реализует при движении ИЦ по
линии визирования свои потенциальные возможности. В некотором смысле
развитый и энергетический методы «ортогональны» друг другу в плане точ-
ности. Следовательно, комбинируя эти методы, можно выровнять рабочую
зону гибридного метода и достичь приемлемых точностных характеристик
для различных условий наблюдения ИЦ.
Для более эффективного применения энергетического метода следует ис-
пользовать процедуры кластеризации и мажоритарной обработки для редук-
ции и отсева ненадежных измерений.
9. Иллюстративный пример
Предположим, что ИЦ осуществляет плоскостное движение: x(t) = x0 +
+vx0t, y(t) = y0 + vy0t, где x0 = y0 = 11 · 103, vx0 = -5 · 102, vy0 = 6 · 102,
γ0 = 85. Здесь и далее время и погрешности измерений временных интер-
валов задаются в секундах (с), координаты и дальность — в метрах (м), ско-
рость — в м/с, ускорение — в м/с2, частота — в герцах (Гц), угол — в градусах,
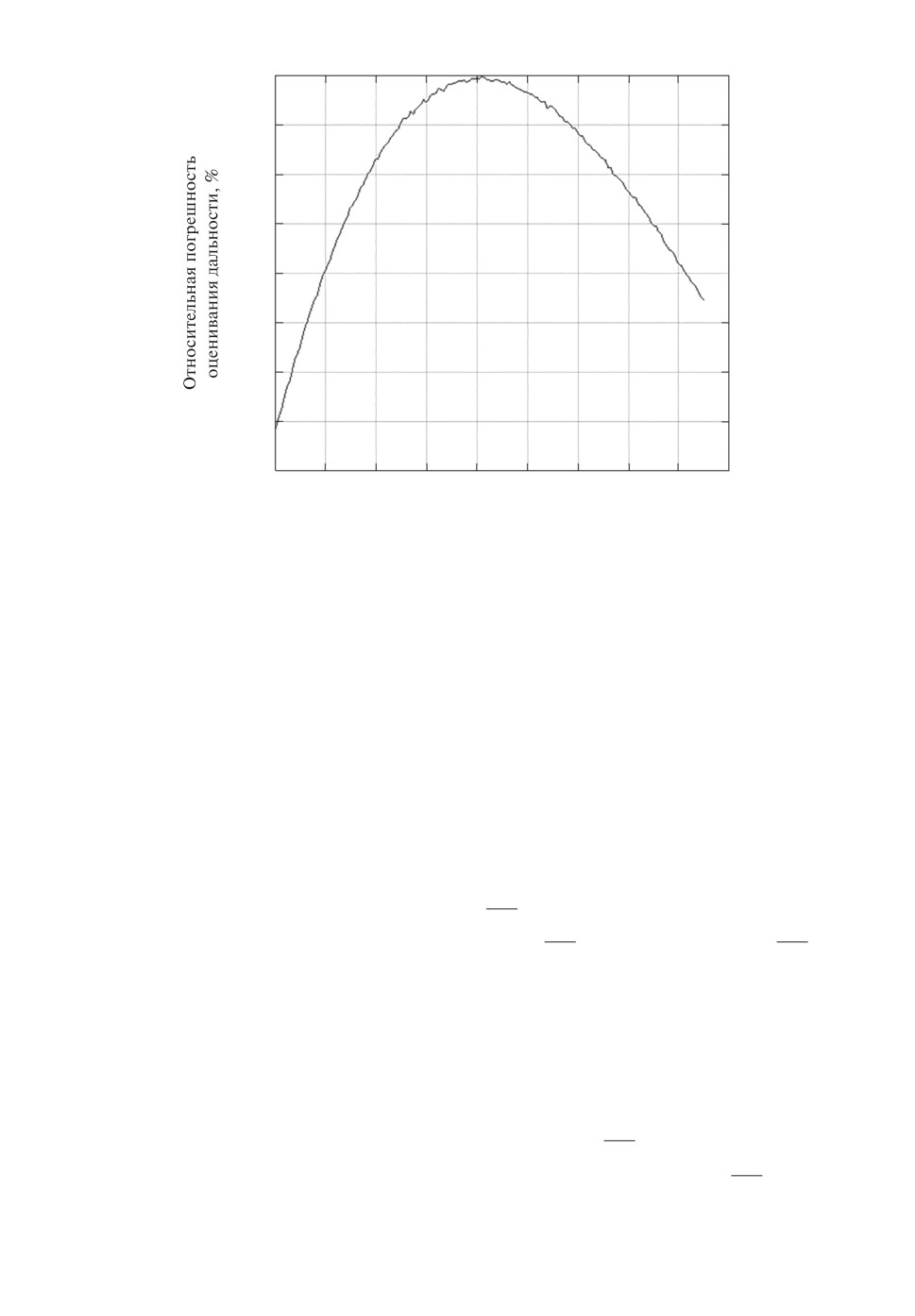
относительная погрешность — в процентах.
ИЦ формирует импульсный радиосигнал
∑
[
]
S0(t) =
rect
(t - kTS)τ-1
cos (2πf0t),
k=1
78
0,208
0,206
0,204
0,202
0,200
0,198
0,196
0,194
0,192
0
2
4
6
8
10
12
14
16
18
Время, с
Относительная погрешность оценивания дальности.
где TS = 10-2, τ = 10-5, f0 = 1010. Параметры работы СОПН: T = 18,
vS = c = 3 · 108, L = 1 (т.е. использован один единственный набор узлов),
[
]
P[1] = 4 (размер набора), ΔMp = ΔM = 10, Kξ = diag
σ2,... ,σ2
, при этом
погрешности измерений временного положения фронтов импульсов полага-
лись некоррелированными и задавались по нормальному закону распределе-
ния с нулевым математическим ожиданием и значением среднеквадратиче-
ского отклонения σ = 10-9.
Реализация метода осуществлялась в два этапа с применением датчи-
ка случайных чисел и усреднением по тысяче экспериментов. На первом
этапе решалась СЛАУ (4.8) с квадратной матрицей B размером 4 × 4 (по-
лагалось A5 = A6 = 0, так как рассматривается ИЦ с нулевым ускорени-
ем), при этом для расчета элементов матрицы B и столбца D исполь-
[
]T
зован вектор t[1] = t[1] + δ[1] =
t[1]p,p = 1,4
с номерами узлов: [1]1 = 12,
]T
[
]T
[1]2 = 65, [1]3 = 118, [1]4 = 171, t[1] =
[t[
=
[1]p · 10-1, p = 1, 4
1]p, p = 1, 4
Из всех четырех оценок неизвестных коэффициентов выбирается только
оценка периода сигнала
TS[1] = 9,999999731646 · 10-3 (получена на основе
набора t[1] =t[1] + δ[1]), которой соответствует относительная погрешность
δTS[1] = 2,683540941544882 · 10-6.
На втором этапе с учетомδ[1]p = t[1]p - M[1]p
TS[1] = t[1]p - [1] pΔ
TS[1] ре-
шалась СЛАУ (5.1) с квадратной матрицей C[l] (размером 3 × 3), при этом
χ4 = χ5 = 0 и использовался наборt[1] =
[t
]T = [1,1; 9,1; 17,1]T.
[1]p, p = 1, 3
(
)
Сама матрица образована строками c-2
-2cδ[1]p, 2t[1]p, t2
, p = 1,3. В ито-
[1]p
R
ге истинной дальности R0 = 1,555634918 · 104 соответствуют оценка
0[1] =
79
= 1,559672203 · 104 и погрешность ΔR0[1] = 0,259526489, истинной скорос-
ти v0 = 7,810249675 · 102 — оценка v0[1] = 7,821417156 · 102 и погрешность
Δv0[1] = 0,142984942, истинному углу γ0 = 84,805571092 — оценка γ0[1] =
= 84,761511501 и погрешность Δγ0[1] = 0,051953650.
На рисунке представлен график зависимости относительной погрешности
оценивания дальности, полученный с учетом (7.4).
Для более эффективного использования разработанного в статье метода
вопрос выбора величины интервала наблюдения и узлов временной сетки,
а также их согласования с динамикой движения ИЦ и величиной погрешно-
стей измерений следует решать в оптимизационной постановке. При решении
СЛАУ следует привлекать известные методы регуляризации. Результаты чис-
ленного эксперимента показывают, что чем больше расстояние между узлами
используемой временной сетки, тем меньшее влияние оказывают случайные
погрешности измерений на результирующую точность оценивания. Это рас-
стояние должно быть согласовано с динамикой ИЦ, а именно: чем меньше
скорость движения ИЦ, тем больше должны быть шаг этой сетки и длитель-
ность интервала наблюдения.
10. Заключение
Разработанный ПВМ позволяет идентифицировать модель криволиней-
ного полиномиального движения ИЦ по результатам регистрации времен-
ной невязки между периодами излученного сигнала и этими же периодами,
подсчитанными в точке наблюдения. Метод не требует знания периода сиг-
нала и предварительной оценки текущей частоты Доплера, а также знания
каких-либо априорных данных о параметрах принятой модели движения ИЦ.
Исследованы наблюдаемость и основные ограничения метода, условия его
наиболее эффективного применения. Получены аналитические соотношения,
позволяющие оценить эволюцию временной невязки с учетом характеристик
ИЦ и СОПН, а также точностные характеристики метода для различных
условий наблюдения.
Метод можно реализовать в различных вариантах: по фиксированной вы-
борке измерений, по выборке измерений нарастающего объема, в виде алго-
ритма динамической фильтрации (линейной, квазилинейной или нелинейной)
и др.
Метод может быть реализован как самостоятельно, так и в составе гибрид-
ного метода, объединяющего другие известные подходы пассивной однопози-
ционной и многопозиционной локации и навигации ИЦ. Поскольку разви-
тый метод позволяет определять дальность, то он может быть использован в
дальномерно-дальномерных системах многопозиционной локации при реше-
нии известной задачи трилатерации [21, 22].
При наличии в периодо-временных измерениях не только флуктуацион-
ных погрешностей, но и сингулярных ошибок целесообразно первоначально
подвергнуть эти измерения процедуре обобщенного инвариантно-несмещен-
80
ного оценивания [28], обеспечивающей компенсацию этих ошибок, достиже-
ние эффекта сглаживания и оптимальное оценивание различных числовых
характеристик (линейных функционалов, например производных, интегра-
лов, спектральных коэффициентов и т.д.), полезных не только для повыше-
ния вычислительной устойчивости метода, но и оценки его эффективности.
Для решения СЛАУ с использованием процедуры регуляризации можно при-
менять известный подход [29].
СПИСОК ЛИТЕРАТУРЫ
1.
Основы маневрирования кораблей / Под ред. М. Скворцова. М.: Воениздат, 1966.
2.
Шебшаевич В.С. Введение в теорию космической навигации. М.: Сов. радио,
1971.
3.
Громов Г.Н. Дифференциально-геометрический метод навигации. М.: Радио и
связь, 1986.
4.
Хвощ В.А. Тактика подводных лодок. М.: Воениздат, 1989.
5.
Соловьев Ю.А. Спутниковая навигация и еe приложения. М.: Экотрендз, 2003.
6.
Мельников Ю.П., Попов С.В. Радиотехническая разведка. М.: Радиотехника,
2008.
7.
Ярлыков М.С. Статистическая теория радионавигации. М.: Радио и связь, 1985.
8.
Сосулин Ю.Г., Костров В.В., Паршин Ю.Н. Оценочно-корреляционная обра-
ботка сигналов и компенсация помех. М.: Радиотехника, 2014.
9.
Булычев Ю.Г., Манин А.П. Математические аспекты определения движения
летательных аппаратов. М.: Машиностроение, 2000.
10.
Булычев Ю.Г., Васильев В.В., Джуган Р.В. и др. Информационно-измеритель-
ное обеспечение натурных испытаний сложных технических комплексов. М.: Ма-
шиностроение - Полет, 2016.
11.
Гельцер А.А. Однопозиционный метод определения местоположения источника
радиоизлучения с использованием отражений сигналов от множества элементов
рельефа и местных предметов // Автореф. дисс. Том. гос. ун-т систем управле-
ния и радиоэлектроники. 2012.
12.
Сиренко И.Л., Донец И.В., Рейзенкинд Я.А. и др. Однопозиционное определе-
ние координат и вектора скорости радиоизлучающих объектов // Радиотехника.
2019. № 10 (16). С. 28-32.
13.
Булычев Ю.Г., Булычев В.Ю., Ивакина С.С., Насенков И.Г. Пассивная локация
группы движущихся целей одним стационарным пеленгатором с учетом апри-
орной информации // АиТ. 2017. № 1. С. 152-166.
Bulychev Yu.G., Bulychev V.Yu., Ivakina S.S., Nasenkov I.G. Passive Location of
a Group of Moving Targets with One Stationary Bearing with Prior Information //
Autom. Remote Control. 2017. V. 78. No. 1. Р. 125-137.
14.
Булычев Ю.Г., Булычев В.Ю., Ивакина С.С., Николас П.И. Оценка наклонной
дальности до цели с полиномиальным законом движения // Вестн. Казан. гос.
ун-та. 2013. № 1. С. 67-74.
15.
Булычев Ю.Г. Некоторые аспекты идентификации динамических объектов при
некорректных условиях наблюдения // АиТ. 2020. № 6. С. 131-152.
81
Bulychev Yu.G. Some Aspects of Identification of Dynamic Objects under Incorrect
Observation Conditions // Autom. Remote Control. 2020. V. 81. No. 6. Р. 1073-1090.
16.
Дятлов А.П., Дятлов П.А. Доплеровские обнаружители подвижных объектов
с использованием «постороннего» источника излучения // Спец. техника. 2010.
№ 5. С. 16-22.
17.
Aidala V.J., Nardone S.C. Biased Estimation Properties of the Pseudolinear
Tracking Filter // IEEE Transact. Aerospas. Electron. Syst. 1982. V. 18. No. 4.
P. 432-441.
18.
Amelin K.S., Miller A.B. An Algorithm for Refinement of the Position of a Light
UAV on the Basis of Kalman Filtering of Bearing Measurements // J. Commun.
Techn. Electron. 2014. V. 59. No. 6. Р. 622-631.
19.
Miller A.B. Development of the Motion Control on the Basis of Kalman Filtering
of Bearing-Only Measurements // Autom. Remote Control. 2015. V. 76. No. 6.
Р. 1018-1035.
20.
Булычев Ю.Г., Мозоль А.А. Однопозиционная пассивная локация источника
излучения с криволинейным движением и учетом эволюции периода сигнала в
точке приема // РЭ. 2023. Т. 68. № 2. С. 131-137.
21.
Кондратьев В.С., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехниче-
ские системы. М.: Радио и связь, 1986.
22.
Черняк В.С. Многопозиционная радиолокация. М.: Радио и связь, 1993.
23.
Нефедов В.И., Сигов А.С., Битюков В.К., Самохина Е.В. Электрорадиоизме-
рения. М.: Форум: Инфра-М. 2018.
24.
Лоусон Ч., Хенсон Р. Численное решение задач метода наименьших квадратов.
М.: Наука, 1986.
25.
Жданюк Б.Ф. Основы статистической обработки траекторных измерений. М.:
Сов. радио, 1978.
26.
Вентцель Е.С. Теория вероятностей. М.: Высш. шк., 1999.
27.
Булычев Ю.Г., Ивакина С.С., Насенков И.Г. Метод пассивно-энергетической
локации и навигации в стационарной и нестационарной постановках // Радио-
техника. 2015. № 6. С. 107-115.
28.
Булычев Ю.Г., Елисеев А.В. Вычислительная схема инвариантно несмещенно-
го оценивания значений линейных операторов заданного класса // ЖВМиМФ.
2008. Т. 48. № 4. С. 580-592.
29.
Булычев Ю.Г., Бурлай И.В. Метод параметрической идентификации систем
управления при неточном задании входных данных // АиТ. 1997. № 11. С. 56-65.
Статья представлена к публикации членом редколлегии О.Н. Граничиным.
Поступила в редакцию 16.06.2022
После доработки 04.05.2023
Принята к публикации 21.05.2023
82