Автоматика и телемеханика, № 8, 2023
Стохастические системы
© 2023 г. С.В. ИВАНОВ, д-р физ.-мат. наук (sergeyivanov89@mail.ru),
А.И. КИБЗУН, д-р физ.-мат. наук (kibzun@mail.ru),
В.Н. АКМАЕВА (akmaeva@mail.ru)
(Московский авиационный институт
(национальный исследовательский университет))
ПАРАМЕТРИЧЕСКИЙ АЛГОРИТМ ПОИСКА
ГАРАНТИРУЮЩЕГО РЕШЕНИЯ ЗАДАЧИ
КВАНТИЛЬНОЙ ОПТИМИЗАЦИИ1
Исследуется задача стохастического программирования с квантильным
критерием для нормального распределения в случае кусочно-линейной
по случайным параметрам и выпуклой по стратегии функции потерь.
С помощью доверительного метода исходная задача аппроксимируется
детерминированной минимаксной задачей, параметризованной радиусом
шара, вписанного в доверительное многогранное множество. Аппрокси-
мирующая задача сводится к задаче выпуклого программирования. Ис-
следуются свойства меры доверительного множества при изменении ра-
диуса шара. Предлагается алгоритм поиска радиуса шара, обеспечиваю-
щего гарантирующее решение задачи. Описан способ получения нижней
оценки оптимального значения критериальной функции. Доказаны тео-
ремы о сходимости алгоритма с любой наперед заданной вероятностью
и о точности получаемого решения.
Ключевые слова: стохастическое программирование, квантильный кри-
терий, доверительный метод, квантильная оптимизация, гарантирующее
решение.
DOI: 10.31857/S0005231023080056, EDN: HBFTOO
1. Введение
Задачи стохастического программирования с квантильным критерием
представляют собой задачи оптимизации, в которых ищется точка минимума
квантили функции потерь, зависящей от стратегии оптимизации и случайных
параметров. Подобные задачи возникают при моделировании технических и
экономических систем, в которых большую роль играют требования к надеж-
ности принимаемого решения. Функция квантили описывает уровень потерь,
который не может быть превышен с заданной фиксированной вероятностью,
как правило, близкой к единице. Задачам данного класса посвящены моно-
графии [1, 2].
1 Работа выполнена при финансовой поддержке Российского научного фонда (проект
73
Эффективным способом решения задачи минимизации функции квантили
является доверительный метод [1, 2]. Суть этого метода состоит в том, что ис-
ходная задача квантильной оптимизации аппроксимируется минимаксной за-
дачей. В этой задаче сначала рассматривается максимум целевой функции на
некотором множестве значений случайных параметров (доверительном мно-
жестве) как функция доверительного множества и стратегии оптимизации.
Затем ищется минимум полученной функции максимума по стратегии опти-
мизации и доверительному множеству. Выбор оптимального доверительного
множества представляет собой непростую задачу. Однако при правильно по-
добранном фиксированном доверительном множестве можно получить доста-
точно точную верхнюю оценку функции квантили. В частности, показано [2],
что для гауссовского распределения случайных факторов выбор доверитель-
ного множества в форме шара при больших значениях уровня надежности
обеспечивает высокую точность получаемой оценки. В данной статье рас-
сматриваются функции потерь, которые представлены как максимум конеч-
ного числа линейных (по случайным параметрам) функций. Для этого класса
функций потерь оптимальным доверительным множеством является много-
гранник. В связи с этим оценку на шаре можно улучшить, проведя допол-
нительную оптимизацию по классу доверительных множеств в форме мно-
гогранников, параметризованных радиусом вписанного шара. Эта идея была
реализована для гауссовского распределения в [3]. В [4] данный алгоритм был
распространен на случай произвольного распределения случайных факто-
ров, а также предложен алгоритм дальнейшего улучшения гарантирующего
решения за счет переноса граней доверительного выпуклого многогранного
множества при сохранении его вероятностной меры. Следует отметить, что
в [3, 4] функция потерь предполагалась линейной по стратегии оптимизации.
Это позволило свести аппроксимирующую минимаксную задачу к задаче ли-
нейного программирования.
Особенностью получаемой при применении алгоритмов [3, 4] аппроксими-
рующей задачи является тот факт, что в случае гауссовского распределения
с ее помощью можно получить не только верхнюю, но и нижнюю оценку
оптимального значения функции квантили. Для этого нужно в аппроксими-
рующей задаче вместо доверительного множества взять ядро вероятностной
меры [2], представляющее собой в случае стандартного гауссовского распре-
деления шар радиуса, вычисляемого как квантиль стандартного нормального
распределения такого же уровня, как и у функции квантили. Следует отме-
тить, что ядро вероятностной меры не является доверительным множеством.
Отдельный интерес представляет случай линейной по случайным пара-
метрам функции потерь. В [1] доказано, что в условиях регулярности ядра
функция квантили может быть вычислена как максимум по случайным па-
раметрам функции потерь на ядре. В дальнейшем условия регулярности яд-
ра были ослаблены в [5]. Указанное свойство ядра использовалось в [6] для
построения алгоритма решения задачи стохастического программирования с
74
квантильным критерием и билинейной функцией потерь, а также в [7] для
аппроксимации вероятностных ограничений.
Задачи стохастического программирования с квантильным критерием яв-
ляются частным случаем задач с вероятностными ограничениями [8, 9]. Об-
зор методов решения задач с вероятностными ограничениями можно найти
в [10]. В частности, следует отметить подход, основанный на использовании
p-эффективных точек [11, 12]. Однако задачи с квантильным критерием об-
ладают рядом свойств, не свойственным задачам с произвольными вероят-
ностными ограничениями, что позволяет использовать специальные методы
анализа, в частности доверительный метод. Задачи с квантильным критери-
ем и дополнительными вероятностными ограничениями подробно изучались
в [1].
В данной статье рассматривается задача стохастического программирова-
ния с кусочно-линейной по случайным параметрам и выпуклой по стратегии
оптимизации функцией потерь, что позволяет аппроксимировать изучаемую
задачу задачей выпуклого программирования. Для этой задачи разрабаты-
вается алгоритм, основанный на идеях построения алгоритмов в [3, 4] для
кусочно-линейных задач. Даются оценки точности предлагаемого алгоритма.
2. Постановка задачи
Пусть X — случайный вектор (столбец) с реализациями x ∈ Rm, задан-
ный на вероятностом пространстве (Ω, F, P). Предполагается, что распреде-
ление X является стандартным нормальным. Будем считать, что функция
потерь Φ является кусочно-линейной по случайным параметрам:
Φ(u, x) ≜ max {B1i(u)x + b1i(u)}.
i=1,k1
Ограничения в задаче описываются функцией
Q(u, x) ≜ max {B2j (u)x + b2j (u)},
j=1,k2
где u ∈ U ⊂ Rn — стратегия; B1i(u), B2j (u) — строки матриц B1(u), B2(u) со-
ответственно, b1j (u), i = 1, k1, и b2j (u), j = 1, k2, — элементы векторов (столб-
цов) b1(u) и b2(u) соответственно. В данной статье предполагается, что функ-
ции u → B1(u), u → B2(u) являются линейными (т.е. Bl(u) = Dlu + al, где
Dl — матрица, al — вектор, l ∈ {1,2}), а функции u → b1(u), u → b2(u) — вы-
пуклыми и непрерывными на выпуклом замкнутом множестве U. Отметим,
что линейное преобразование случайного вектора X не изменяет структуры
функций Φ и Q. Кроме того, любой нормальный вектор может быть получен
за счет линейного преобразования вектора X подходящей размерности. По
этим причинам случай произвольного нормального распределения вектора X
сводится к рассматриваемому.
75
Определим функцию вероятности
Pϕ(u) ≜ P{Φ(u,X) ≤ ϕ, Q(u,X) ≤ 0},
где ϕ ∈ R — заданное значение функции потерь, и функцию квантили
Φα(u) ≜ min{ϕ | Pϕ(u) ≥ α}, α ∈(0,P∗),
где
P∗ ≜ sup P{Q(u,X) ≤ 0}.
u∈U
В статье рассматривается задача квантильной оптимизации
(1)
Uα ≜ Arg min
Φα(u).
u∈U
Поскольку функции Φ и Q являются непрерывными и измеримыми, согласно
результату [13, теорема 6], являющемуся обобщением аналогичного резуль-
тата в [1], функция u → Φα(u) является полунепрерывной снизу. Поэтому
решение задачи (1) существует, если множество U компактное. Определим
оптимальное значение критериальной функции
ϕα ≜ Φα(uα),
где uα ∈ Uα. В дальнейшем будем предполагать, что решение задачи (1) суще-
ствует. При этом ограниченность множества U, вообще говоря, не требуется.
3. Построение оценок решения
Согласно доверительному методу [1] задача (1) эквивалентна задаче
{
}
(2)
ϕα = min
sup Φ(u,x) | sup Q(u,x) ≤ 0
,
S ∈Eα,u∈Ux∈S
x∈S
где Eα — семейство всех доверительных множеств S ⊂ Rm уровня α, т.е. бо-
релевских множеств таких, что P{X ∈ S} ≥ α.
Обозначим через Br шар радиуса r:
Br ≜ {x∈ Rm | ∥x∥ ≤ r},
√
где ∥x∥ ≜
x⊤x — евклидова норма вектора x.
Рассмотрим задачу, аналогичную задаче (2), в которой зафиксировано
множество S = Br:
{
}
(3)
ψ(r) ≜ min
max
Φ(u, x) | max Q(u, x) ≤ 0
u∈U
x∈Br
x∈Br
76
Будем предполагать, что минимум по u в задаче (3) достигается, что выпол-
нено, например, в случае компактного множества U. В задаче (3) супремум
заменен на максимум, поскольку
max
Φ(u, x) = max max {B1i(u)x + b1i(u)} =
x∈Br
x∈Br i=1,k1
= max
max
{B1i(u)x + b1i(u)} = max {b1i(u) + ∥B1i(u)∥r}.
i=1,k1
x∈Br
i=1,k1
Аналогичным образом находится max Q(u, x). Таким образом, задача (3) мо-
x∈Br
жет быть переписана в виде
{
}
(4) ψ(r) = min max
{b1i(u) + ∥B1i(u)∥r} | max {b2j (u) + ∥B2j (u)∥r} ≤ 0
u∈U i=1,k1
j=1,k2
Если ограничения этой задачи несовместны, будем считать, что ψ(r) = +∞.
Из монотонного неубывания целевой функции и сужения множества допу-
стимых стратегий при увеличении r следует, что функция ψ является неубы-
вающей. Задача (4) эквивалентна задаче выпуклого программирования
(5)
ϕ → min
u∈U, ϕ∈R
при ограничениях
b1i(u) + ∥B1i(u)∥r ≤ ϕ, i = 1,k1,
b2j(u) + ∥B2j(u)∥r ≤ 0, j = 1,k2.
Эквивалентность здесь понимается в том смысле, что оптимальное значение
переменной ϕ совпадает с ψ(r), а множества допустимых значений u сов-
падают. Общее число ограничений этой задачи обозначим через k = k1 + k2.
Задача (5) может быть решена с высокой точностью с помощью методов вы-
пуклой оптимизации [14].
Пусть Rα — шар вероятностной меры α, т.е. решение уравнения
P{X ∈ BRα} = α.
Зафиксируем в задаче (2) доверительное множество S в форме шара BRα .
Тогда в силу (2) ψ(Rα) ≥ ϕα. Таким образом, может быть найдена верхняя
оценка функции квантили.
Для поиска нижней оценки может быть использовано ядро вероятност-
ной меры, определяемое как пересечение всех замкнутых полупространств A
таких, что P{X ∈ A} = α. Известно, что при α >12 ядро распределения стан-
дартного нормального гауссовского вектора является шаром радиуса ρα с цен-
тром в нуле, где ρα — квантиль стандартного нормального распределения
уровня α. В [1, раздел 3.4.3, следствие 2] показано, что ψ(ρα) ≤ ϕα, когда X
распределен стандартно нормально.
77
Таким образом, получена оценка
(6)
ψ(ρα) ≤ ϕα ≤ ψ(Rα).
Верхнюю оценку ψ(Rα) можно улучшить. Пусть (u(r), ψ(r)) — некоторое
решение задачи (5). Определим множество
{
}
Cr ≜ x∈Rm | Φ(u(r),x) ≤ ψ(r), Q(u(r),x) ≤ 0
=
{
(7)
= x∈Rm | B1i(u(r))x + b1i(u(r)) ≤ ψ(r),
}
B2j(u(r))x + b2j(u(r)) ≤ 0, i = 1,k1, j = 1,k2
Введем обозначение h(r) ≜ P{X ∈ Cr} для вероятностной меры множе-
ства Cr. Отметим, что h(r) и Cr зависят от выбора u(r). Поэтому в даль-
нейшем выбор u(r) считается зафиксированным.
Так как
(8)
max
Φ(u(r), x) = ψ(r), max Q(u(r), x) ≤ 0,
x∈Br
x∈Br
справедливо включение Br ⊂ Cr. Кроме того,
(9)
max
Φ(u(r), x) = max
Φ(u(r), x), max Q(u(r), x) ≤ 0.
x∈Br
x∈Cr
x∈Cr
Из (8) и (9) следует, что если h(r) ≥ α, то множество Cr является довери-
тельным и ψ(r) ≥ ϕα.
Из монотонности ψ следует, что верхнюю оценку функции квантили мож-
но улучшить, найдя r, близкое к r∗ ≜ inf{r | h(r) ≥ α}, такое что h(r) ≥ α.
Если функция r → h(r) является монотонной, то для поиска r∗ может быть
применен метод дихотомии. К сожалению, функция h может оказаться немо-
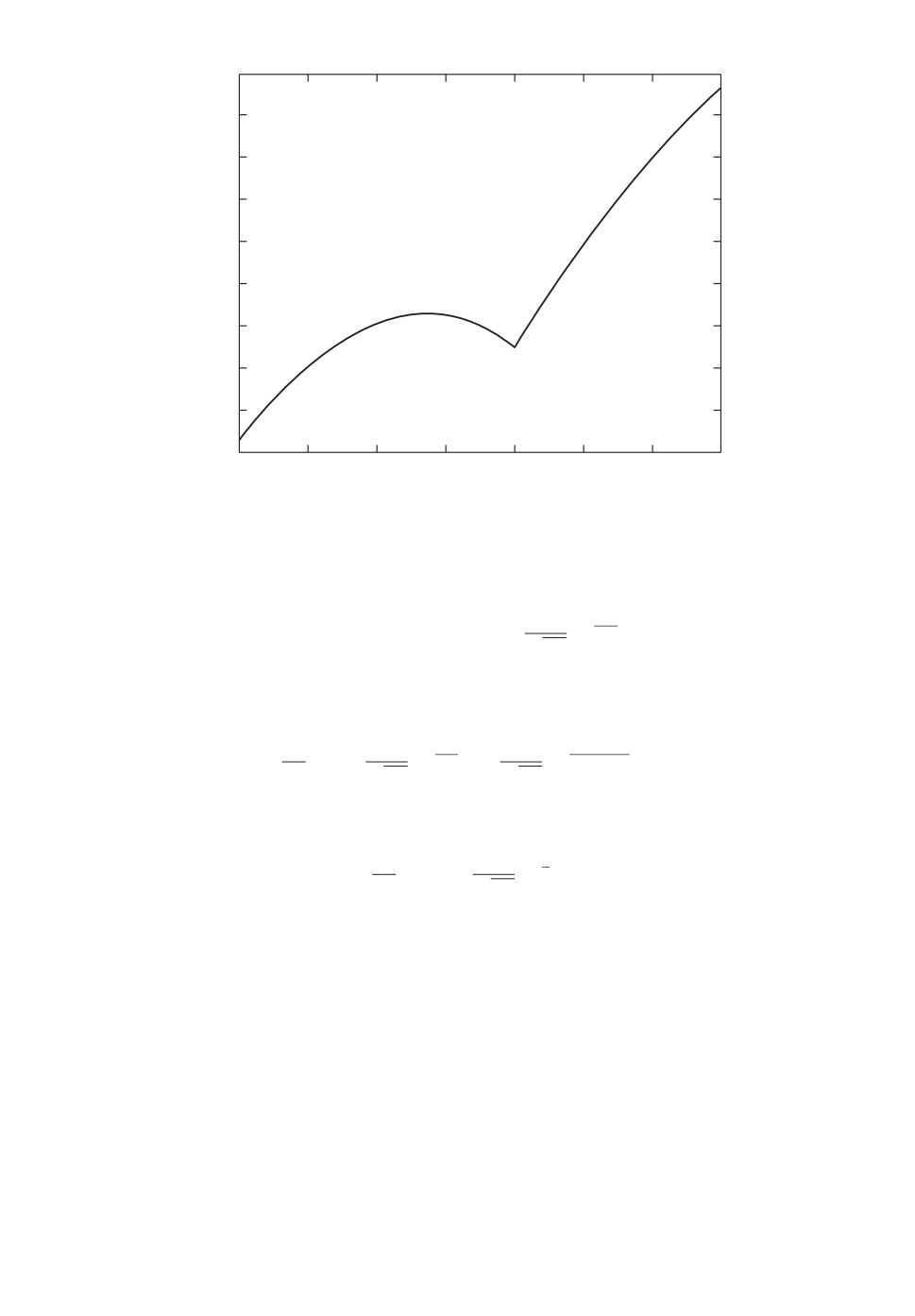
нотонной, что демонстрирует следующий пример.
Пример 1. Пусть функция потерь имеет вид
Φ(u, x) = max{u + 4x, -u + 2x + 2, -11u - 4x},
u∈R, x — реализация случайной величины X ∼ N(0,σ2), σ2 = 19.
Как нетрудно проверить, задача (5) имеет решение
u(r) = 1 - r, ψ(r) = 1 + 3r при r ∈ [0, 1];
u(r) = 0, ψ(r) = 4r при r ∈ [1, +∞).
Поэтому
{
[-3 + 2r, r], если r ∈ [0, 1],
Cr = {x | Φ(u(r),x) ≤ ψ(r)} =
[-r, r],
если r ∈ [1, +∞).
78
0,9986
0,9984
0,9982
0,9980
0,9978
0,9976
0,9974
0,9972
0,9970
0,9968
0,92
0,94
0,96
0,98
1,00
1,02
1,04
1,06
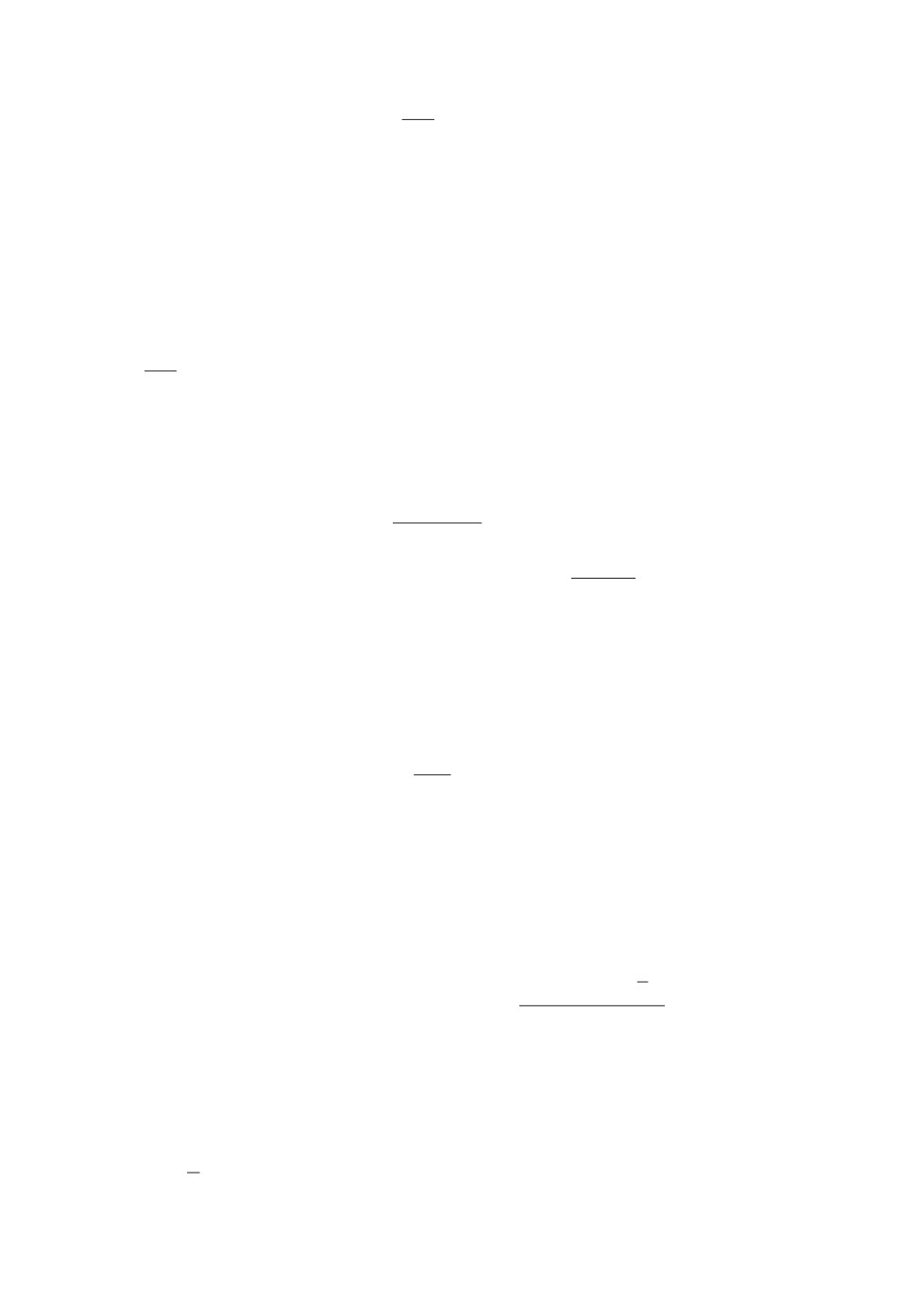
График зависимости h(r) = P{X ∈ Cr} от r.
Вычислим меру множества Cr при r ∈ [0, 1]:
∫r
2
3
h(r) = P{X ∈ Cr} =
√ e-32 dx.
2π
-3+2r
Вычислим производную полученной функции:
dh
3
3
(2r-3)2
(r) =
√
e-322 - 2√ e-3
2
dr
2π
2π
Вычислим левосторонний предел
dh
3
lim
(r) = -√ e-2 < 0.
r→1- dr
2π
Это значит, что на некотором интервале (1 - ε, 1), где ε > 0, функция h убы-
вает. При этом h(1) ≈ 0,9973. График зависимости h(r) изображен на рисунке.
Как видно из приведенного примера, функция h может оказаться немо-
нотонной. В связи с этим предложим достаточные условия, обеспечивающие
монотонность функции h.
Теорема 1. Пусть U = Rn и выполнены условия:
1) b1i(u) = A1iu + c1i, A1i — строки матрицы A1, b2j(u) = A2ju + c2j,
A2j — строки матрицы A2, матрицы B1(u) и B2(u) не зависят от u;
2) строки блочной матрицы
)
(A1 ek1
A2
0k2
79
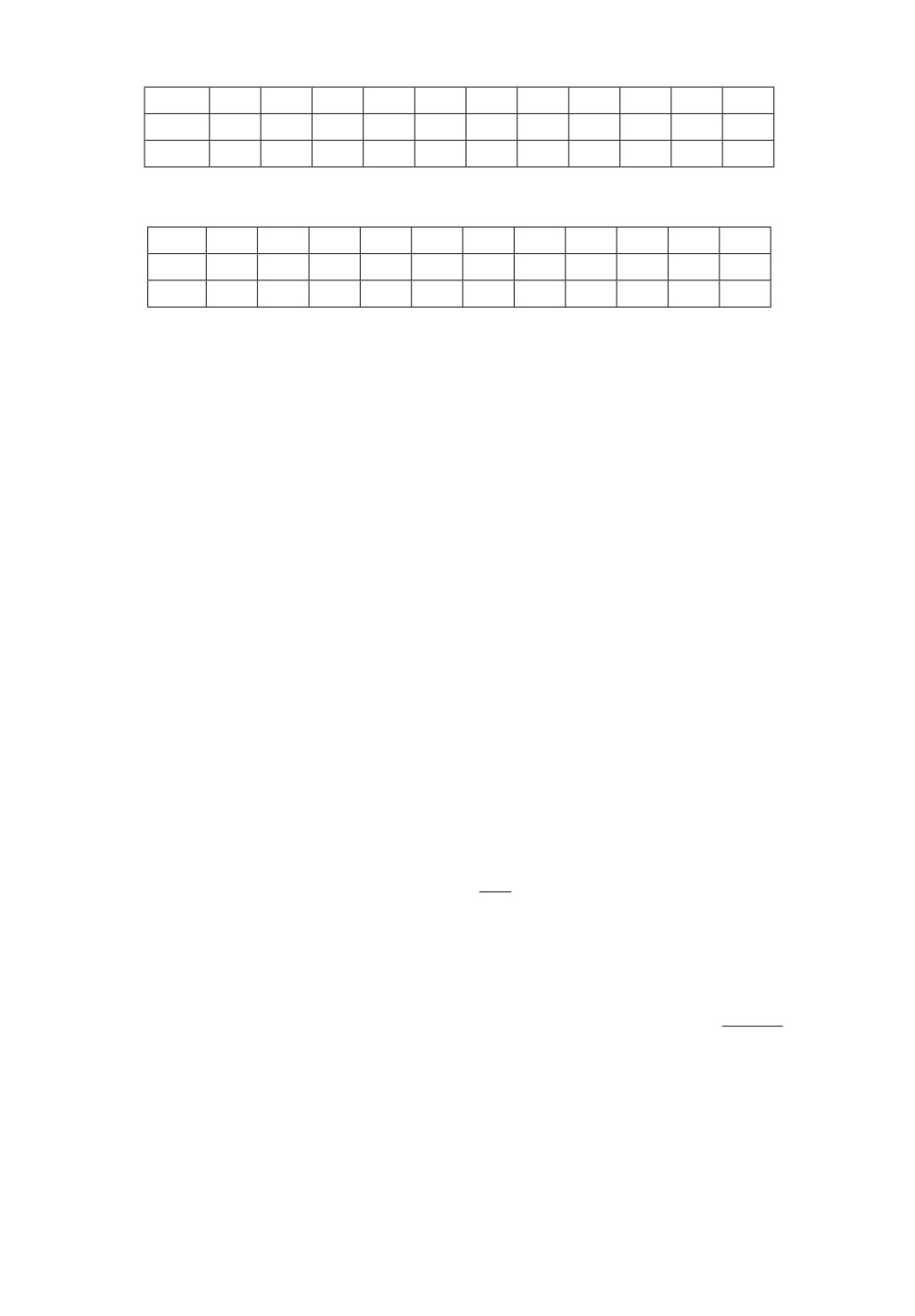
Таблица 1. Зависимость Rα от m
α\m
1
2
3
4
5
6
7
8
9
10
50
0,95
1,96
2,45
2,80
3,08
3,32
3,55
3,75
3,94
4,11
4,28
8,22
0,99
2,58
3,03
3,37
3,64
3,88
4,10
4,30
4,48
4,65
4,82
8,73
Таблица 2. Зависимость ρβ от k
α\k
1
2
3
4
5
6
7
8
9
10
50
0,95
1,64
1,96
2,13
2,24
2,33
2,39
2,45
2,50
2,54
2,58
3,09
0,99
2,33
2,58
2,71
2,81
2,88
2,93
2,98
3,02
3,06
3,09
3,54
являются линейно независимыми, где ek1 , 0k2 — столбцы из единиц и нулей
соответственно (если Q(u,x) ≡ 0, то в приведенной выше матрице строки,
соответствующие A2, отсутствуют);
3) при некотором r = R решение задачи (5) существует.
Тогда функция h является неубывающей на отрезке [0, R].
Доказательство теоремы 1 и всех последующих теорем вынесены в Прило-
жение.
Отметим, что в теореме 1 множество U не является компактным. К сожа-
лению, более общие условия монотонности функции h предложить затруд-
нительно, так как монотонность меры может быть гарантирована только в
предположении расширения множества Cr при увеличении r. Однако гаран-
тировать можно только удаление от начала координат граней, касающихся
шара Br. Остальные грани могут как удаляться, так и приближаться к на-
чалу координат.
В связи с немонотонностью функции h необходимо по возможности макси-
мально точно указать интервал, в котором необходимо искать r∗. Для этого
получим следующий результат.
Теорема 2. Пусть k = k1 + k2. Неравенство h(r) ≥ α выполнено, если
r ≥ ρβ и множество Cr определено, где ρβ — квантиль стандартного нор-
мального распределения уровня β = 1 -1-αk .
Из теоремы 2 и неравенства (6) следует, что
(10)
ψ(ρα) ≤ ϕα ≤ min{ψ(Rα), ψ(ρβ )} = ψ (min{Rα, ρβ }) .
√
Из определения доверительного шара следует, что Rα =
χ2α(m), где
χ2α(m) — квантиль распределения хи-квадрат с m степенями свободы. В отли-
чие от Rα величина ρβ не зависит от размерности случайного вектора, а зави-
сит только от числа ограничений k. Известно [2], что Rα - ρα → 0 при α → 1,
но скорость сходимости зависит от размерности n. Нетрудно заметить, что
ρβ → +∞ при k → 1. Однако оказывается, что при небольших значениях k
может быть выполнено неравенство ρβ < Rα. Зависимость Rα от m приведена
в табл. 1, а зависимость ρβ от k — в табл. 2. Рассматриваются уровни α = 0,95
80
и α = 0,99. Пусть, например, m = 8, α = 0,95. Тогда Rα = 3,94, а ρβ < Rα да-
же при k = 50.
Заметим, что при k = 1 выполнено равенство ρβ = ρα. Поэтому ϕα =
= ψ(ρα), а оптимальная стратегия uα может быть найдена из задачи (5) при
r = ρα, что согласуется с известным результатом [5].
4. Алгоритм поиска гарантирующего решения
Стратегию u ∈ U, удовлетворяющую соотношению ϕα(u) ≤ ψ (min{Rα, ρβ }),
будем называть гарантирующим решением. Таким образом, гарантирующее
решение может быть найдено из задачи (5) при r =Rα, гдеRα ≜ min{Rα, ρβ }.
Обозначим данное гарантирующее решение через u0. В данном разделе пред-
лагается алгоритм улучшения гарантирующего решения u0, т.е. обеспечиваю-
щего меньшее значение критериальной функции ϕα(u), чем ϕα(u0).
Как было отмечено в предыдущем разделе, для поиска радиуса шара r∗,
вписанного в доверительный многогранник Cr, можно использовать метод
дихотомии. При этом возникают следующие трудности: во-первых, непре-
рывность и монотонность h(r) = P{X ∈ Cr} в общем случае не гарантиру-
ется, во-вторых, вычисление вероятности попадания X в многогранник Cr
требует использования приближенных методов. Тем не менее будем для по-
иска улучшенного гарантирующего решения использовать метод дихотомии.
В связи с тем, что h(r) будем вычислять приближенно с помощью процеду-
ры Монте-Карло, будем искать такое значение r, при котором h(r) ≥ α + ε,
где ε — малая положительная константа (ε < 1 - α). Приближенное вычисле-
ние меры может привести к тому, что будет найдено недопустимое решение
задачи, поэтому необходимо задать вероятность p нахождения допустимо-
го решения. Поскольку квантильная постановка подразумевает нахождение
решения, гарантирующего заданный уровень значения целевой функции с ве-
роятностью α, рекомендуется выбирать p ≥ α.
Алгоритм 1.
1. Установить параметры алгоритма ε ∈ (0, 1 - α) (параметр точности вы-
числения меры), δ > 0 (параметр точности вычисления радиуса) и p ∈ [α, 1)
(вероятность нахождения допустимого решения).
2. Вычислить ρα — квантиль уровня α стандартного нормального распре-
√
деления иRα ≜ min{Rα, ρβ}, где Rα =
χ2α(m), χ2α(m) — квантиль распре-
деления хи-квадрат с m степенями свободы, β = 1 -1-αk .
3. Вычислить объем выборки
⌉
√p))
N =
,
2ε2
⌈
|Rα - ρα|⌉
где K = log2
, ⌈a⌉ — округление a до ближайшего целого в боль-
δ
шую сторону.
81
4. Задать r1 := ρα, r2 :=Rα.
5. Найти нижнюю оценку решения ψ(r1) и верхнюю оценку ψ(r2) опти-
мального значения критериальной функции, а также начальное гарантирую-
щее решение u(r2), решив задачу (5) при r = r1 и r = r2.
6. Пока |r1 - r2| > δ повторять следующие шаги:
6.1. Присвоить r :=r1+r22.
6.2. Вычислить u(r) и ψ(r), решив задачу (5).
6.3. Смоделировать N независимых реализаций случайного вектора X.
6.4. Вычислить μ(r) ≜ P{X ∈ Br} = Fχ2(m)(r2), где Fχ2(m)(r2) — значение
функции распределения закона хи-квадрат с m степенями свободы в точке r2.
6.5. Найтиĥ(r) — оценку меры множества Cr, определенного формулой (7):
ĥ(r) = μ(r) +s(r),
N
где s(r) — количество элементов выборки, попавших во множество Cr \ Br.
6.6. Еслиĥ(r) ≥ α + ε, то r2 := r. Иначе r1 := r.
7. В качестве гарантирующего решения принять u(r2).
Отметим, что для повышения точности алгоритма можно использовать
не метод дихотомии, а делить отрезок поиска решения на несколько равных
частей. В этом случае на шаге 6.1 алгоритма нужно будет брать несколько
значений r в отрезке [r1, r2]. Также следует заметить, что в случае немо-
нотонной зависимости r → h(r) алгоритм может не найти корень уравнения
h(r) = α + ε, но при этом будет найдено некоторое гарантирующее решение.
Сформулируем теорему о сходимости алгоритма.
Теорема 3. Пусть задача (5) имеет решение при r∈[ρα, Rα]. Тогда при-
менение алгоритма обеспечивает нахождение гарантирующего решения с
вероятностью, не меньшей p.
Следующая теорема характеризует точность решения, найденного с по-
мощью предложенного алгоритма 1. Этот результат является уточнением
[2, теорема 3.13] для задач оптимизации рассматриваемого класса.
Теорема 4. Пусть функция ψ определена и принимает конечные значе-
ния на отрезке [ρ,R], а функция потерь является липшицевой с констан-
той L, т.е.
|Φ(u, x) - Φ(u, y)| ≤ L∥x - y∥.
Также предположим, что
(11)
max {b2j (u(ρ)) + ∥B2j (u(ρ))∥R} ≤ 0.
j=1,k2
Тогда 0 ≤ ψ(R) - ψ(ρ) ≤ (R - ρ)L.
82
Как было показано в (10), ψ(ρα) ≤ ϕα ≤ ψ(Rα). Это неравенство говорит о
близости найденной верхней оценки критериальной функции к ее оптималь-
ному значению. Теорема 4 дает оценку границ в этих неравенствах, которая
может быть получена еще до применения алгоритма 1. Согласно этой оценке
0 ≤ ψ( Rα) - ψ(ρα) ≤ L| Rα - ρα|,
если выполнены условия теоремы 4. Отметим, что эти условия выполнены
для липшицевой функции потерь, например, при Q(u, x) ≡ 0.
5. Численный эксперимент
Пример 2. Найдем гарантирующее решение задачи (1) для
{
Φ(u, x) = max
u1 + 3u3 + 2u5 + x1 + 2x3 + 4,
-u1 + 2u2 - u3 + 3u4 + 2u5 + 2x1 - x2 + 2x3,
2u1 + u2 + 2u3 - 2u4 - u5 + 3x1 + x2 + 2x3 + 2,
3u1 - 2u2 + u3 + 3u4 - 3u5 - 2x1 + 3x2 - 3x3 + 5,
0,1u21 - 0,02u1u2 - 0,03u1u3 + 0,2u22 + 0,05u23 + 0,3u24 +
}
+ 0,1u25 - 0,2u1 - 0,3u2 - 0,1u3 - 0,2u5 - 3x1 - 2x2 + x3 + 6
,
Q(u, x) = 3u2 + u1 + 4u3 - 2u5 - x1 - 3x2 - 4x3 - 10,
{
}
U =
u∈R5 | ui ∈[0;10],i = 1,5
, α = 0,95. Для данного уровня α, ρα = 1,645,
Rα = 2,796, β = 0,992, ρβ = 2,394,
Rα = 2,394. Поэтому функцию h нужно
рассматривать на отрезке [1,645; 2,394]. Решая задачу (5) при r = ρα и r =Rα,
находим оценку
ϕα ∈ [ψ(ρα), ψ(Rα)] = [11,813; 14,754].
Начальное гарантирующее решение имеет вид
u(Rα) = (0,139; 0,602; 0,000; 0,004; 1,613)⊤.
Зададим параметры алгоритма: ε = 0,001, δ = 0,01, p = 0,99. Для этих
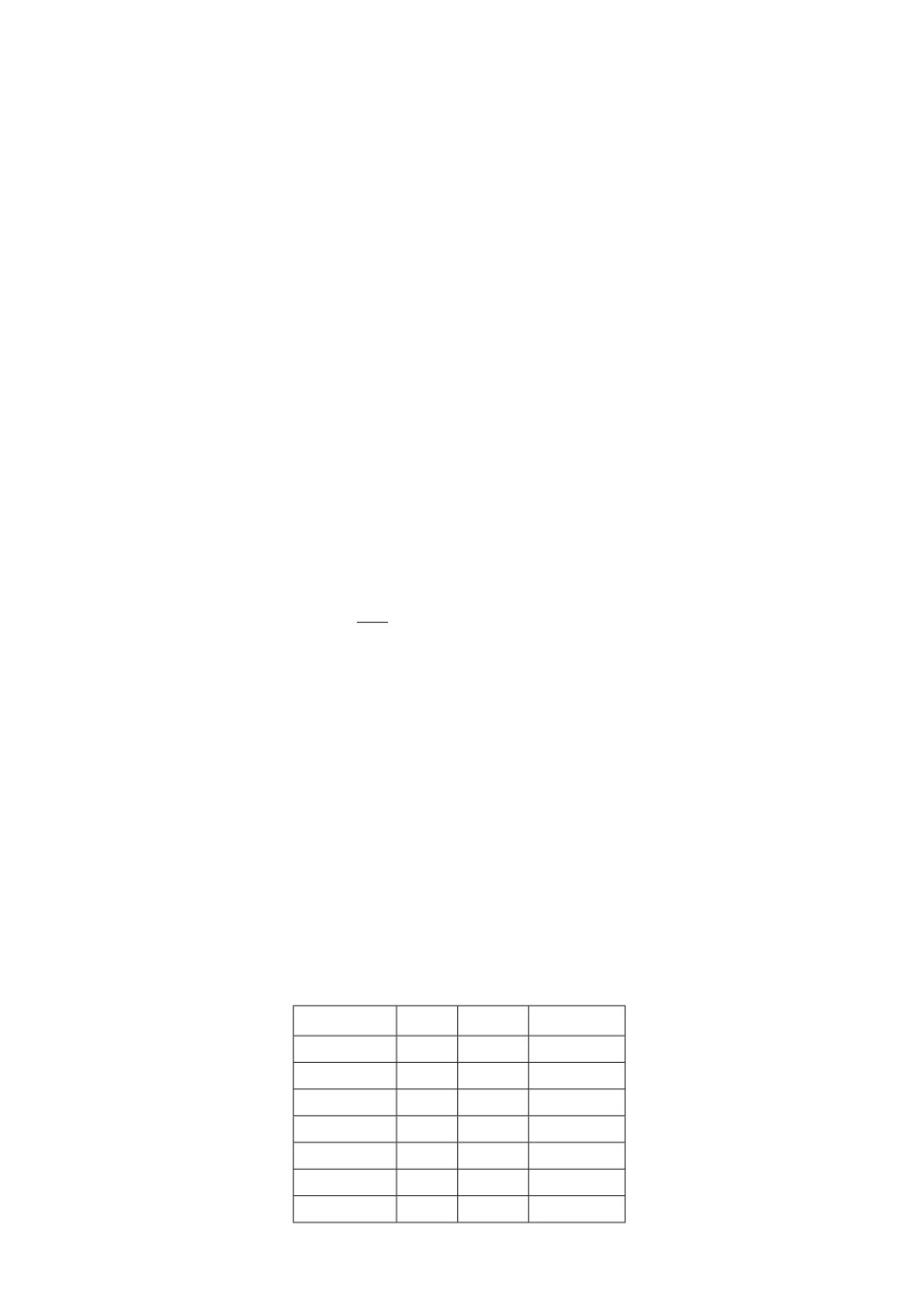
параметров требуется объем выборки N = 3 273 389. Применение алгорит-
ма 1 отражено в табл. 3. Улучшенное гарантирующее решение соответствует
Таблица 3. Применение алгоритма 1
Итерация r
ĥ(r)
ψ(r)
1
2,019
0,949
13,267
2
2,207
0,970
14,007
3
2,113
0,961
13,635
4
2,066
0,956
13,451
5
2,043
0,952
13,359
6
2,031
0,950
13,313
7
2,037
0,9507
13,336
83
r = r∗ ≜ 2,043 и имеет вид
u(r∗) = (0,536; 0,688; 0,000; 0,003; 1,356)⊤.
При этом
ϕα ∈ [ψ(ρα), ψ(r∗)] = [11,813; 13,359].
Таким образом, применение алгоритма 1 позволило сократить длину интер-
вала неопределенности оптимального значения критериальной функции на
(1 -13,359-11,81314,754-11,813 )100% = 47%, что говорит об эффективности предложенного
алгоритма.
Все вычисления проводились на ЭВМ с процессором Intel(R) Core(TM)
i5-6300U CPU, 2,40 ГГц, ОЗУ 8 ГБ в системе Matlab с использованием про-
граммы для решения квадратичных задач оптимизации Gurobi. Время счета
составило 1035 с. Основной объем счета составило вычисление меры много-
гранника Cr с помощью метода Монте-Карло.
6. Заключение
В статье предложен алгоритм решения задачи стохастического програм-
мирования с квантильным критерием в случае кусочно-линейной по случай-
ным параметрам и выпуклой по стратегии функции потерь. Достоинством
предлагаемого алгоритма является легкость построения аппроксимирующих
задач, которые в дальнейшем могут быть решены с помощью методов вы-
пуклой оптимизации. Основную вычислительную трудность при его примене-
нии составляет необходимость оценки меры с помощью метода Монте-Карло.
Предложенный алгоритм выбора доверительного множества, параметризо-
ванного радиусом вписанного шара, как показал пример, может быть успеш-
но применен для решения задач стохастической оптимизации с квантильным
критерием в случае выпуклой кусочно квадратично-линейной функции по-
терь. Можно заметить, что данный алгоритм может быть применен и для
случая дискретных стратегий оптимизации. Вид алгоритма 1 при этом не
изменится, но в ходе применения алгоритма нужно будет решать не выпук-
лую задачу непрерывной оптимизации, а задачу дискретной оптимизации.
Алгоритмы решения подобных задач могут являться предметом дальнейших
исследований.
ПРИЛОЖЕНИЕ
Доказательство теоремы 1. Условия 2 и 3 гарантируют, что все
ограничения в задаче (5) являются активными. Это значит, что все грани
множества Cr касаются шара Br. При увеличении r на отрезке [0, R] грани
множества Cr переносятся параллельно, касаясь шара Br. Это значит, что
множество Cr расширяется при увеличении r. Поэтому функция h, опреде-
ленная как мера Cr, является неубывающей. Теорема 1 доказана.
84
Доказательство теоремы 2. Пусть γ ∈(0,1). Множество Cργ опре-
делено как пересечение k полуплоскостей меры, не меньшей γ. Обозначим
эти полуплоскости через Li, i = 1, k. Тогда
{
}
{
}
⋂
⋃
h(ργ ) = P X ∈ Li
= 1 - P X ∈ (Rm \ Li)
≥
i=1
i=1
∑
≥ 1 - P{X ∈ Li} = 1 - (1 - γ)k.
i=1
Таким образом, h(ργ ) ≥ α при α ≤ 1 - (1 - γ)k, что равносильно γ ≥ β =
= 1 - 1-αk. Теорема 2 доказана.
Доказательство теоремы 3. Поскольку на каждой итерации отре-
зок поиска решения сужается два раза, число итераций алгоритма K может
быть найдено как минимальное натуральное число K, удовлетворяющее нера-
венству
|Rα - ρα|
≤ δ.
2K
⌈
⌉
|Rα-ρα|
Из данного неравенства следует, что K = log2
. Алгоритм может
δ
совершить ошибку при своей работе только в том случае, когда на неко-
торой итерации окажется, чтоĥ(r) ≥ α + ε, хотя на самом деле h(r) < α.
Как нетрудно заметить, случайная величина s(r) распределена по биноми-
альному закону с вероятностью успеха h(r) - μ(r). Известно неравенство
[15, гл. 1, § 6]:
{
}
s(r)
P{ĥ(r) - h(r) ≥ ε} = P
- (h(r) - μ(r)) ≥ ε
≤e-2Nε2.
N
Поэтому, если предположить, что h(r) < α, то P{ĥ(r) ≥ α + ε} ≤ e-2Nε2 . По-
скольку выборки, используемые для оценки меры, независимые, вероятность
безошибочной работы алгоритма составляет не менее (1 - e-2Nε2 )K . Отсю-
да следует, что для обеспечения вероятности успешной работы алгоритма p
должно быть выполнено неравенство
ln(1/(1 -K
√p))
p ≤ (1 - e-2Nε2)K ⇐⇒ N ≥
2ε2
Теорема 3 доказана.
Доказательство теоремы
4. Пусть Ψ(u, r) ≜ maxx∈Br Φ(u, x) =
= Φ(u,x0(r)), где x0 — точка на границе шара Br, в которой достигается ука-
занный максимум. Так как Bρ ⊂ BR, выполнено Ψ(u, ρ) ≤ Ψ(u, R). Поскольку
точка y =ρR x0(R) лежит на границе шара Bρ, Φ(u, y) ≤ Ψ(u, ρ). Поэтому
0 ≤ Ψ(u,R) - Ψ(u,ρ) ≤ Φ(u,x0(R)) - Φ(u,y) ≤ L∥x0(R) - y∥ = (R - ρ)L.
85
Таким образом, справедливы неравенства
(Π.1)
Ψ(u, ρ) ≤ Ψ(u, R) ≤ Ψ(u, ρ) + (R - ρ)L.
Минимизируя левые и правые части первого неравенства в (Π.1) по u ∈ U так,
что maxj=1,k2 {b2j (u) + ∥B2j (u)∥R} ≤ 0 (ограничения задачи (4) при r = R),
получаем первое доказываемое неравенство ψ(ρ) ≤ ψ(R) (здесь учтено, что
ψ(ρ) определен как минимум на более широком множестве). Из (11) и второго
неравенства в (Π.1) следует, что
ψ(R) ≤ Ψ(u(ρ), R) ≤ Ψ(u(ρ), ρ) + (R - ρ)L = ψ(ρ) + (R - ρ)L.
Из этой оценки следует второе доказываемое неравенство. Теорема 4 дока-
зана.
СПИСОК ЛИТЕРАТУРЫ
1.
Kibzun A.I., Kan Y.S. Stochastic Programming Problems with Probability and
Quantile Functions. Chichester, New York, Brisbane, Toronto, Singapore: John
Wiley & Sons, 1996.
2.
Кибзун А.И., Кан Ю.С. Задачи стохастического программирования с вероят-
ностными критериями. М.: Физматлит, 2009.
3.
Кибзун А.И., Наумов А.В. Гарантирующий алгоритм решения задачи квантиль-
ной оптимизации // Космические исследования. 1995. Т. 33. № 2. С. 160-165.
4.
Наумов А.В., Иванов С.В. Исследование задачи стохастического линейного про-
граммирования с квантильным критерием // АиТ. 2011. № 2. С. 142-158.
Naumov A.V., Ivanov S.V. On stochastic linear programming problems with the
quantile criterion // Autom. Remote Control. 2011. V. 72. No. 2. P. 353-369.
5.
Кан Ю.С. Расширение задачи квантильной оптимизации с линейной по случай-
ным параметрам функцией потерь // АиТ. 2020. № 12. С. 67-81.
Kan Yu.S. An extension of the quantile optimization problem with a loss function
linear in random parameters // Autom. Remote Control. 2020. V. 81. No. 12. P. 2194-
2205.
6.
Васильева С.Н., Кан Ю.С. Метод решения задачи квантильной оптимизации с
билинейной функцией потерь // АиТ. 2015. № 9. С. 83-101.
Vasil’eva S.N., Kan Yu.S. A method for solving quantile optimization problems with
a bilinear loss function // Autom. Remote Control. 2015. V. 76. No. 9. P. 1582-1597.
7.
Васильева С.Н., Кан Ю.С. Аппроксимация вероятностных ограничений в зада-
чах стохастического программирования с использованием ядра вероятностной
меры // АиТ. 2019. № 11. C. 93-107.
Vasil’eva S.N., Kan Yu.S. Approximation of Probabilistic Constraints in Stochastic
Programming Problems with a Probability Measure Kernel // Autom. Remote
Control. 2019. V. 80. No. 11. P. 2005-2016.
8.
Prékopa A. Stochastic Programming. Dordrecht-Boston: Kluwer, 1995.
9.
Shapiro A., Dentcheva D., Ruszczynski A. Lectures on Stochastic Programming.
Modeling and Theory. Philadelphia: Society for Industrial and Applied Mathematics
(SIAM), 2014.
86
10. Lejeune M.A., Prékopa A. Relaxations for Probabilistically Constrained Stochastic
Programming Problems: Review and Extensions // Ann. Oper. Res. 2018.
11. Dentcheva D., Prékopa A., Ruszczynski A. On Convex Probabilistic Programming
with Discrete Distributions // Nonlinear Anal.-Theor. 2001. V. 47. No. 3. P. 1997-
2009.
12. Van Ackooij W., Berge V., de Oliveira W., Sagastizábal C. Probabilistic Optimiza-
tion via Approximate p-Efficient Points and Bundle Methods // Comput. Oper. Res.
2017. V. 77. P. 177-193.
13. Иванов С.В., Кибзун А.И. Общие свойства двухэтапных задач стохастического
программирования с вероятностными критериями // АиТ. 2019. № 6. С. 70-90.
Ivanov S.V., Kibzun A.I. General properties of two-stage stochastic programming
problems with probabilistic criteria // Autom. Remote Control. 2019. V. 80. No. 6.
P. 1041-1057.
14. Boyd S., Vandenberghe L. Convex Optimization. Cambridge: University Press, 2009.
15. Ширяев А.Н. Вероятность. М.: МЦНМО, 2017.
Статья представлена к публикации членом редколлегии Е.Я. Рубиновичем.
Поступила в редакцию 30.01.2023
После доработки 16.05.2023
Принята к публикации 09.06.2023
87