Автоматика и телемеханика, № 8, 2023
Управление в технических системах
© 2023 г. В.Ю. РУТКОВСКИЙ, д-р техн. наук (vglum@ipu.ru),
В.М. ГЛУМОВ, д-р техн. наук (vglum@ipu.ru),
А.С. ЕРМИЛОВ канд. техн. наук (44eas@mail.ru)
(Институт проблем управления им. В.А. Трапезникова РАН, Москва)
УПРАВЛЕНИЕ УГЛОВЫМ ДВИЖЕНИЕМ БОЛЬШОЙ
КОСМИЧЕСКОЙ КОНСТРУКЦИИ С УПРУГИМИ ЭЛЕМЕНТАМИ1
Решается задача угловой ориентации и стабилизации космической кон-
струкции при ее сборке на орбите. Рассматривается вариант конструкции,
в состав которой входят упругие элементы, устанавливаемые в процессе
сборки. Упругие элементы конструкции не имеют датчиков для получе-
ния информации о параметрах их деформаций. Предлагаются алгоритмы
управления, обеспечивающие устойчивость углового движения конструк-
ции. Для получения необходимой информации используется нелинейный
расширенный фильтр Калмана. Разработан алгоритм совместного оце-
нивания координат углового движения рассматриваемой механической
системы и координат тонов упругих колебаний, а также алгоритм иден-
тификации их ненаблюдаемых параметров. Приведены результаты ма-
тематического моделирования варианта механической системы космиче-
ской конструкции, которые подтверждают работоспособность и эффек-
тивность разработанных алгоритмов оценки координат и параметров.
Ключевые слова: математическая модель, алгоритм управления, космиче-
ская конструкция, гироскопический привод, демпфирование колебаний,
оценивание координат.
DOI: 10.31857/S0005231023080081, EDN: HCPDXK
1. Введение
Современные космические аппараты (КА) представляют собой динамиче-
ские объекты управления, механические структуры которых содержат упру-
гие элементы. В [1] отмечается, что по мере увеличения размеров и услож-
нения механической структуры таких аппаратов растет влияние упругих
свойств конструкции на динамику режима ориентации. Кроме того, суще-
ствует тенденция к усложнению самой конструкции современных КА, напри-
мер использование протяженных упругих элементов. Возмущение в динами-
ку КА привносит и трансформация элементов изменяемость конструкции в
1 Работа выполнена при частичной финансовой поддержке Российского фонда фунда-
ментальных исследований (грант № 20-08-00073).
122
процессе эксплуатации КА [2]. С развитием космических технологий появи-
лись крупногабаритные космические конструкции, получившие наименова-
ние «большие космические конструкции» (БКК), которые могут создаваться
в космосе различными способами. БКК — многомерная многочастотная ме-
ханическая система с изменяющимися параметрами [3, 4].Одними из первых
БКК рассматривались крупногабаритные зонтичные рефлекторы, создание
конструкций которых предполагалось с помощью сборки в космосе [5]. Раз-
витие космической робототехники позволяет решать задачи сборки БКК с
использованием различных роботизированных устройств [6]. В [7] отмеча-
ется, что развитие космической робототехники характеризуется наличием
двух тенденций. С одной стороны, предполагается совершенствование эле-
ментов перспективной космической инфраструктуры типа крупногабаритных
многомодульных КК, например орбитальных станций, у которых неотъемле-
мой составляющей являются средства робототехники. С другой стороны, все
больше обращается внимание на робототехническое сервисное обслуживание,
трактуемое в широком смысле и подразумевающее также роботизированные
монтажные операции применительно к весьма широкому классу объектов [8].
Из робототехнических средств предполагается активное использование кос-
мических манипуляционных роботов [9], в том числе свободно летающих ро-
ботов [10].
В настоящей работе рассматривается собираемая в космосе БКК зонтич-
ного типа, которая представляет собой динамический объект управления с
переменными параметрами, с большим и дискретно изменяющимся во вре-
мени числом степеней свободы. Как механическая система, такая БКК может
рассматриваться в виде последовательности формируемых в процессе сбор-
ки промежуточных механических структур. Конструкция содержит упругие
элементы, устанавливаемые в процессе сборки с помощью космического ма-
нипулятора или свободно летающего космического манипуляционного робота.
Рассматривается вариант БКК, у которой упругие элементы не имеют датчи-
ков информации о координатах и параметрах колебаний. Одними из основ-
ных задач управления БКК являются управление ориентацией и стабилиза-
ция осей корпуса конструкции. Решение этой задачи традиционно получается
на основе релейных или дискретных алгоритмов [11]. Разрывный характер
управляющих воздействий на корпус и ударные воздействия при установке
новых элементов конструкции являются причинами возникновения упругих
колебаний БКК. При управлении угловым движением БКК возникает про-
тиворечие между основной целью управления упругим динамическим объ-
ектом как жестким телом и необходимостью демпфирования возникающих
упругих колебаний. Отсутствие сил атмосферного сопротивления приводит
к накоплению энергии упругих колебаний в процессе управления «жестким»
движением БКК. Превышение критической амплитуды упругих колебаний и
близость их частот к частотам управления «жестким» движением приводят
к неустойчивости системы [12]. Отсутствие точного определения переменных
параметров математической модели (ММ) в наземных условиях приводит
123
к необходимости решать задачу устойчивого и точного управления угловым
движением на всех этапах сборки БКК с использованием методов робастного
или адаптивного управления динамическими объектами [13].
В [14] предлагается алгоритм управления ориентацией БКК при наличии
низких частот упругих колебаний, существенно влияющих на качество пе-
реходных процессов вследствие близости собственных частот конструкции к
частоте управления ее «жестким» движением. В [15] решается задача обеспе-
чения робастной устойчивости упругих колебаний КА с нелинейной системой
управления ориентацией, использующей двигатели-маховики. Решение осно-
вано на целенаправленном изменении границ областей устойчивости в про-
странстве параметров объекта и регулятора с целью максимизации числа
робастно устойчивых упругих компонент конструкции КА. Следует отме-
тить, что алгоритмы, обеспечивающие робастное управление, эффективны
для окончательно собранной комической конструкции (КК). Предлагаемый
в [14, 15] подход ограничен необходимостью получения текущей информации
о состоянии системы и параметрах ее ММ. Алгоритмы адаптивного управле-
ния позволяют обеспечить устойчивость и гашение колебаний в достаточно
широком диапазоне значений собственных частот упругих колебаний БКК
при минимальном значении конструкционного демпфирования. В [16] были
определены три типа стратегии адаптивного управления КК на последова-
тельности этапов ее изменения при сборке в космосе. Первый тип: управ-
ление с использованием анализа и прогноза состояния упругих колебаний
БКК. Второй тип: управление с оценкой фазы доминирующей колебатель-
ной составляющей в спектре частот упругих колебаний в момент переклю-
чения управления. Третий тип: управление на основе нечеткой логики [17].
В [18] предлагается алгоритм адаптивного управления с эталонной моделью
угловым движением собираемой БКК. Его функционирование не зависит от
интенсивности и спектрального состава входных воздействий и не требует
оценивания упругих колебаний БКК. Однако алгоритм обеспечивает высо-
кую точность управления при больших энергетических затратах. В настоя-
щее время уделяется внимание реализации первого типа стратегии адаптив-
ного управления БКК, при котором используются методы идентификации и
оценивания состояния механической системы конструкции. В [11] предложе-
но активное демпфирование упругих колебаний конструкции Международ-
ной космической станции двигателями ориентации с использованием алгорит-
мов идентификации. Для получения необходимой информации для управле-
ния угловым движением космической конструкции с упругой механической
системой целесообразно использовать алгоритмы оценивания на основе тео-
рии фильтрации Калмана-Бьюси [19]. В [20] решена задача оценивания коор-
динат упругих колебаний КК с использованием нелинейного расширенного
фильтра Калмана. В настоящей работе (в развитие [20]) разработан алгоритм
совместного оценивания координат углового движения механической систе-
мы и неизмеряемых координат тонов упругих колебаний, а также алгоритм
идентификации их ненаблюдаемых параметров. Решается задача формиро-
124
вания алгоритмов управления угловой стабилизацией КК на этапах сбор-
ки. Предполагается, что на каждом этапе сборки происходит подсоединение
элемента конструкции, вызывающее упругие колебания, которые необходимо
демпфировать в течение заданного промежутка времени с использованием
силовых гироскопических исполнительных органов системы угловой стаби-
лизации БКК.
2. Математическая модель углового движения БКК
Структуру механической системы БКК зонтичного типа будем рассмат-
ривать в виде совокупности твердых тел, одно из которых является несу-
щим. Остальные (носимые) тела являются строительными элементами, при-
соединяемыми в том или ином порядке к несущему телу при использовании
спиральной схемы сборки каркаса «зонтичного» типа. Такая механическая
система содержит нежесткие элементы и характеризуется дискретно изме-
няющимся числом степеней свободы [21]. В точках присоединения элементов
конструкции учитываются вращательная степень свободы в рассматривае-
мой плоскости движения и упругая связь, ограничивающая возможные сме-
щения элементов областью малых отклонений относительно состояния рав-
новесия [22]. При использовании в качестве исполнительного органа соби-
раемой БКК гироскопического силового привода, содержащего три одинако-
вых гиродина (ГД), установленных по схеме трехлучевой звезды, возникают
взаимосвязи каналов гиростабилизации, которые обусловлены инерционны-
ми и гироскопическими влияниями [23]. Упрощенная ММ пространственного
углового движения механической системы рассматриваемого типа БКК, по-
лученная из полной ММ, подробно представлена в [23]. Для решения задачи
аналитического синтеза структуры алгоритмов управления ГД модель дви-
жения БКК с гиросиловым приводом, пренебрегая перекрестными влияния-
ми движений ГД, можно упростить до трех однотипных каналов управления
и гиростабилизации БКК вида
∑
Ix χ +
Ii,x qi,x - Hβ + aIβ
βs + F(χ˙) = Mx,
i=1
(1)
ai,x χ + qi,x + bi,x
˙qi,x + ci,xqi,x = 0, i = 1,nx,
Iβ
β+kdβ˙+Hχ+aI
βs = Mu(ux),
где χ = (ψ, ϕ, ϑ)T — вектор углов ориентации корпуса, β = (βψ, βϕ, βϑ)T —
вектор углов прецессии рамок ГД, q = (qk)T — составной вектор коорди-
нат, характеризующих упругие колебания элементов конструкции по каж-
дому из трех каналов углов ориентации так, что qk = (qi,k)T, i = 1, nx,
где nx — число учитываемых в канале χk упругих координат, (k = 1, 3);
βs = [(βϕ + βϑ),(βψ + βϑ),(βϕ + βψ)]T; a = cos(π/4 = 0,707 (для установки ГД
типа “звезда”), Iβ — моменты инерции рамок ГД; H = diag(h1, h2, h3) — диа-
125
гональная матрица кинетических моментов ГД; kd — коэффициент демпфи-
рования по оси подвеса ГД; ai,x, bi,x, ci,x — параметры уравнений колебаний
∑
упругих элементов; Ix
Ix +
Ii,x, где
Ix — диагональная матрица осевых
i=1
моментов инерции корпуса
Ii,x — матрица инерционного влияния i-го упру-
гого элемента на динамику конструкции; F (χ˙) — вектор нелинейных функ-
ций, содержащих произведения χiχj, i, j = 1, 3, i = j; Mx — вектор возму-
щающих моментов внешних сил, действующих на корпус; Mu(ux) — вектор
управляющих моментов, прикладываемых относительно осей рамок ГД; ux —
вектор управляющих напряжений, компоненты которого подаются на входы
соответствующих моментных приводов ГД.
В режиме угловой ориентации и стабилизации БКК на этапе сборки зна-
чения скоростей χ˙k достаточно малые, что позволяет пренебречь в F (χ˙) про-
изведениями χiχj , i, j = 1, 3, i = j. При аналитическом исследовании гироси-
лового управления с тремя одинаковыми ГД целесообразно пренебречь меж-
канальными перекрестными связями и считать в (1) aIβ
βs = 0 [22]. Тогда
система (1) имеет вид
∑
Ix χ +
Ii,xqi,x - Hβ = Mx,
i=1
(2)
ai,x χ + qi,x + bi,x
˙qi,x + ci,xqi,x = 0, i = 1,nx,
Iβ
β+kdβ˙+Hχ+aI
βs = Mu(ux).
ММ (2) является основой для декомпозиции ее на три подсистемы, которые
соответствуют изолированным каналам гиростабилизации [22].
3. Алгоритмы управления угловым движением БКК
Синтез алгоритмов управления динамическими объектами с ММ вида (1)
или (2) традиционно проводится последовательно двумя шагами [22]. На пер-
вом шаге определяются тип и параметры алгоритмов, формирующих величи-
ны компонент вектора ux(t), до начала сборки без учета упругих колебаний
(q = 0). Такие алгоритмы называются базовыми, при синтезе которых ММ
(2) преобразуется к виду
Ix χ - Hβ = Mx,
(3)
Iβ
β+kdβ˙+Hχ+aI
βs = Mu(ux).
На втором шаге синтеза для стабилизации и гашения упругих колебаний
предлагается дополнительно к базовому алгоритму сформировать алгоритм
управления, в котором используется информация об упругих колебаниях эле-
ментов и их параметрах.
126
В качестве базовых алгоритмов управления гиродинами в режиме стаби-
лизации БКК на этапе сборки целесообразно применение ПД-алгоритмов в
каждом k-м канале в виде
ux,k(t) = p1,kχk(t) + p2,kχ˙k(t), k = 1,3,
где p1,k, p2,k — коэффициенты, которые выбираются с учетом параметров
уравнений (3) и без учета упругости конструкции из условий обеспечения
устойчивости и требуемого качества управления.
Управляющие моменты, прикладываемые относительно осей прецессии
ГД, формируются в виде [22]
(4)
Mu,k(ux,k) = p0,k(p1,kχk(t) + p2,kχ˙k
(t)), k = 1, 3,
где коэффициенты p0,k определяются конкретными конструкционными ха-
рактеристиками корпуса и устанавливаются в зависимости от моментов инер-
ции Ix на этапе сборки. Следует отметить, что ММ (3) с алгоритмами (4)
описывают линейную динамическую систему с постоянными параметрами
на этапе сборки, для которой из анализа ее характеристических уравнений в
каждом k-м канале определяется условие устойчивости по вектору угловых
скоростей χ˙ в виде [22]
(5)
kd(hk + p0,kp2,k) > Iβp0,kp1,k
,
k = 1,3.
На основе тех же характеристических уравнений решается задача опре-
деления значений коэффициентов p1,k, p2,k алгоритмов (4), которые обеспе-
чивают требуемое время регулирования tr,k ≈ 3/η∗k, k = 1, 3 по координатам
вектора χ. Здесь η∗k — заданные значения степеней устойчивости характери-
стических уравнений [22].
Исследования динамики БКК зонтичного типа показали, что при увели-
чении числа упругих элементов в спектре частот появляются пониженные
частоты упругих колебаний. Следует отметить, что гиросиловая система с
базовым алгоритмом (4) обеспечивает необходимое демпфирование высоко-
частотных упругих колебаний. Однако при этом в указанной низкочастот-
ной области процессы демпфирования упругих колебаний средствами базо-
вого управления (4) при условии (5) оказываются излишне затянутыми [22].
Подобная динамика процессов ориентации и стабилизации углового положе-
ния БКК является неудовлетворительной. Кроме этого, увеличение времени
демпфирования упругих колебаний создает известные трудности при исполь-
зовании свободно летающего космического манипуляционного робота в про-
цессе сборки БКК [24]. Указанные недостатки требуют усложнения исходно-
го базового алгоритма управления (4). Возможный путь коррекции базового
алгоритма состоит в организации подсистемы дополнительной гиросиловой
стабилизации низкочастотных упругих колебаний БКК, использующей оцен-
ки qi,x,ˆ˙qi,x соответствующих упругих координат. Дополнительная подсистема
127
подключается после окончания маневра переориентации и установки элемен-
та конструкции на этапе сборки. Для ускорения гашения колебаний подси-
стема формирует на входах ГД дополнительные воздействия вида
∑
∑
(6)
Md,k(uq,k) =
p1,k,iqk,i +
p2,k,iqk,i,
k = 1,3,
i=1
i=1
где
qk,
qk
— векторы оценок упругих координат и их производных,
p1,k,i, p2,k,i — постоянные на этапе сборки коэффициенты.
При выборе значений коэффициентов в (6) необходимо учитывать значе-
ния оценок параметров в уравнениях упругих колебаний ММ (2). Оценки зна-
чений парциальных частот ωi,x =
√ci,x из низкочастотного спектра упругих
колебаний позволяют выбрать коэффициенты p1,k,i, p2,k,i, которые обеспечи-
вают устойчивость и минимальное время гашения упругой компоненты [22].
При использования оценок χ,ˆχ с учетом (6) управляющие моменты форми-
руются в виде
[
(
)
∑
nx
(7)
Mu,k(ux,k) = p0,k p1,k
χk - I-1
Ii,k qi,k
+
x
i=1(
)]
∑
nx
+p2,k
χk - I-1
x
Ii,k
qi,k
,
k = 1,3.
i=1
Коэффициенты усиления в (7) при оценках qi,k,
˙qi,k зависят от значе-
ни
Ii,k, которые могут быть меньше значений Ix на порядок и более. Для
ускоренной активной компенсации влияния упругих колебаний на угловую
ориентацию БКК целесообразно в (7) ввести перенастраиваемые коэффици-
енты p1,k,i, p2,k,i. Тогда алгоритмы (7) принимают вид
[ (
)
∑
(8) Mu,k(ux,k) = p0,k p1,k
χk -
p1,k,iqi,k
+
i=1
(
)]
∑
+p2,k
χk -
p2,k,iqi,k
,
k = 1,3,
i=1
где p1,k,i ≫ p1,kI-1x
Ii,
p2,k,i ≫ p2,kI-1x
Ii.
Если упругие элементы не имеют датчиков информации, то необходимо
решать задачу получения оценок q и параметров упругих колебаний на каж-
дом этапе сборки БКК после его окончания. Для решения данной задачи
используется модифицированный вариант предложенного в [20] алгоритма
оценивания на основе фильтра Калмана.
128
4. Синтез алгоритма совместного оценивания координат
упругих колебаний и их параметров
Синтез алгоритма совместного оценивания координат углового движения
и координат колебаний (тонов) упругих элементов конструкции проведем на
примере изолированного канала χ2 = ϕ, который получается из ММ (2) в
виде
∑
Iϕ
ϕ+
Iiqi - h2β˙ = Mϕ,
i=1
(9)
ai
ϕ+qi +bi˙qi + ciqi = 0, i = 1,nx,
Iβ
β + kdβ˙ + h2ϕ˙ = Mu(uϕ),
где Mu(uϕ) = pϕuϕ, pϕ = (p1,ϕ, p2,ϕ) — вектор коэффициентов, uϕ = (ϕ,ϕ˙)T.
При синтезе алгоритма оценивания полагаем Mϕ = 0. Тогда система (9)
преобразуется к виду [20]:
¯ϕ - I-1ϕh2β˙ = 0,
⎛
⎞
(
)
n
∑
∑
1-I-1
ai
Ii
aj
Ij⎠ (bi
˙qi + ciqi) +
ϕ
qi +⎝1 - Iϕ1
i=1
i=1,j=i
(10)
∑
+ai
Ij(bj
˙qj + cjqj) + aih2β˙ = 0,
i=1,j=i
(
)
n
∑
Iβ
β+kdβ˙+h2
ϕ-I-1
Ii
qj
=pϕuϕ.
φ
i=1
и угол ϕ определяется выражением
∑
(11)
ϕ=
ϕ-I-1ϕ
Iiqi,
i=1
где
ϕ — угол поворота корпуса, вызванный вращением БКК как жесткого
объекта.
Представление координаты ϕ в виде (11) позволяет применять алгорит-
мы фильтрации для совместного оценивания координат углового движения
рассматриваемой механической системы БКК с ГД, неизмеряемых коорди-
нат qi тонов упругих колебаний, а также идентификации параметров упру-
гих колебаний в реальном времени. Следует отметить, что в отличие от [20]
система (10) нелинейная, так как содержит неизвестные параметры. Для по-
лучения оценок используется нелинейный расширенный фильтр Калмана.
При синтезе алгоритма оценивания представим уравнения ММ (10) и (11) в
форме Коши
(12)
x(t) = f(x(t)) + duϕ
+ Cw(t),
129
где x ∈ R5n+4 — вектор состояния, x = (
ϕ,¯ϕ,β,β,qi,
˙qi,ai,bi,ci)T, i = 1,n,
b ∈ R5n+4 с ненулевым элементом d4 = 1, f(x) — нелинейная вектор-функ-
ция, определяемая из (10) и (11),
f1 = x2, f2 = I-1ϕh2x2n+4, f2i+1 = x2i+2, f2n+3 = x2n+4,
[
(
)]
∑
f2n+4 = I-1
d4uϕ - kdx2n+4 - h2 x2 - I-1
Iix2i+2
,
β
ϕ
i=1
⎡
f2i+2 = (·)-1 ⎣x2n+4+ih2x2n+4 - (·)j(x3n+4+ix2i+2 + x4n+4+ix2i+1) -
⎤
∑
-x2n+4+i
Ij(x3n+4+jx2j+2 + x4n+4+jx2j+1)⎦ ,
j=1,j=i
∑
∑
где (·) = 1 - I-1ϕ
ai
Ii, (·)j = 1 - I-1
ϕ
aj
Ij, j = 1,n, j = i,
j=1,j=i
i=1
f2n+4+i = f3n+4+i = f4n+4+i = 0; w ∈ R4n+2 — вектор шумов,
C = diag(C0 ···Ci ···) — блочно-диагональная матрица шумов объекта,
содержащая блоки C0 ∈ R4×2, Ci ∈ R5×4. Элементы матрицы C0 нулевые,
кроме c21 = c42 = 1, в матрицах Ci также нулевые элементы, кроме c21,i =
=c32,i =c43,i =c64,i =1 .
Предполагается, что в (10) неизвестные параметры упругих колебаний
приняты постоянными на этапе сборки. При необходимости в вектор состоя-
ния χ можно включить любые параметры, что приводит к громоздкости ма-
тематических выражений.
Если на борту БКК измеряются только координаты ϕ и ϕ˙, то уравнение
измерений имеет вид
(13)
z(t) = Gx(t) + v(t),
∑
где вектор измерений z ∈ R2 имеет координаты z1 = x1 - I-1ϕ
Iix4+i + v1,
i=1
∑
z2 = x2 - I-1ϕ
Iix4+n+i + v2; v — вектор шумов измерителей.
i=1
Структура матрицы измерений G ∈ R2×(5n+4) имеет вид [20]
G = [C1G2 ···Gi+2],
где C1, G2, Gi+2 — присоединенные матрицы, i = 1, n; G1 — квадратная еди-
ничная матрица, G2 — квадратная нулевая матрица; матрица Gi+2 ∈ R2×5
состоит из следующих ненулевых элементов: g11,i = g22,i = -I-1ϕ
Iϕ.
Предполагается, что начальные значения x(t0), w, v независимы между со-
бой, w и v — гауссовские белые шумы с нулевыми математическими ожида-
ниями и корреляционными функциями:
M〈w(t)wT(τ)〉 = Qw(t)δ(t - τ), M〈v(t)vT(τ)〉 = Qv(t)δ(t - τ).
130
Здесь δ — дельта-функция Дирака, диагональные матрицы интенсивности
шумов Qw(t) и Qv(t) непрерывны и положительно определены для t ≥ t0. То-
гда задача синтеза алгоритма оценивания координат x(t) по измерениям z(t)
сводится к частному случаю непрерывного нелинейного расширенного филь-
тра Калмана [20] с постоянными матрицами C и G:
x(t) = f(x) + du(t) + P (t)GTQ-1v[z(t) - Gx(t)],
(14)
˙
P
(t) = D(x)P (t) + P (t)D-1(x) - P (t)GTQ-1vGP (t) + CQw(t)CT,
где x(t) — вектор оценок координат вектора x(t), P (t) — ковариационная
матрица, D(x) = ∂f(x)/∂x — матрица Якоби.
5. Математическое моделирование
Исследование возможностей алгоритма управления (8) для активной ком-
пенсации упругих колебаний при угловой ориентации БКК по координа-
те ϕ проведено с помощью математического моделирования с использова-
нием в (8) оценок, получаемых на основе алгоритма (14). Предполагалось,
что количество тонов и величины их параметров известны и одинаковы как
в ММ (9), так и в алгоритме оценивания (14), кроме тех параметров, кото-
рые считаются в (14) неизвестными. Для сокращения времени моделирования
в (9) исследовались только два тона, т.е. n = 2, а для формирования момента
управления использовались оценки
ϕ,ϕиqi,˙qi БКК. В качестве неизвестных
были выбраны постоянные параметры c1 и c2, а их оценки ĉ1 и ĉ2 использо-
валась в (14).
Сигнал управления формируется на основе (8) в виде
∑
∑
(15)
uφ = p1
ϕ-
p1,iq1,i + p2ϕ-
p2,iq2,i,
i=1
i=1
где коэффициенты p1,i, p2,i имеют тот же порядок, что и p1 и p2 соответ-
ственно.
При моделировании динамики угловой ориентации с целью получения из-
мерений в качестве ММ использовался вариант системы (9) с алгоритмом (15)
в виде [20]
(16)
y=Ay
duϕ,
где y ∈ R8 — вектор состояния, y = (ϕ,¯ϕ,β,β,q1,q2,q1,q2)T
d ∈ R8 — вектор
с одним ненулевым элементо
d4 = 1.
На основе (16) формировался вектор измеряемых координат z = (ϕ∗,ϕ˙∗)T
с помощью выражения z =Gy + v, где матрица
G∈ R2×8 имеет ненуле-
вые элементы g1,1 = g2,2 = 1, g1,5 = g2,7 = -I-1ϕ
I1,
g2,6 = g2,8 = -I-1ϕ
I2, v =
= (v1, v2)T — вектор шумов измерений.
131
В (14) использовалась ММ (12) с вектором x ∈ R10, в который включе-
ны идентифицируемые неизвестные параметры c1 и c2, x = (ϕ,¯ϕ,β,β,qi,qi,
c1,c2)T, i = 1,2, d ∈ R10 — вектор с одним ненулевым элементом d4 = 1.
C ∈ R10×6 — матрица шумов с ненулевыми элементами c2,1 = c4,2 = c6,3 =
= c8,4 = c9,5 = c10,6 = 1. Модель измерений для алгоритма (14) формируется
в виде z = Gx, где матрица G ∈ R2×10 отличается от матрицы G наличием де-
вятого и десятого нулевых столбцов. Матрицы Qw ∈ R6×6 и Qv ∈ R2×2 в (14)
приняты постоянными.
Начальные значения при t0 = 0 координат и параметров, а также векто-
ров y, x и элементов диагональной ковариационной матрицы P (0) приняты
следующими [20]:
y1(0) = 0,017; y2(0) = 0,016 c-1; y3(0) = 0,18 · 10-3;
y4(0) = 0,7 · 10-4 c-1; y5(0) = 0,017; y6(0) = 0,19 · 10-4 c-1;
y7(0) = 0,37 · 10-2; y8(0) = 0,13 · 10-4 c-1;
a1 = 1,2; a2 = 2,32; b1 = 0,24 c-1; b2 = 0,12 c-1;
c1 = (0,34)2 c-2; c2 = (0,47)2 c-2;
Iϕ = 69200 Нмc2;
I1 = 1270 Нмc2;
I2 = 2500 Нмc2;
Iβ = 1,1 Нмc2; kd = 2,5 Нмc; h = 240 Нмc;
p1,1 = 3,9 · 10-6; p2,2 = 3,8 · 10-6 c-2; p3,3 = 0,49 · 10-2;
p4,4 = 6,1 · 10-4 c-2; p5,5 = 4,7 · 10-4; p6,6 = 0,54 · 10-2 c-2;
p7,7 = 0,11 · 10-4; p8,8 = 0,11 · 10-6 c-2;
p9,9 = 1,1 · 10-3 c-4; p10,10 = 1,8 · 10-3 c-4.
Использовались начальные значения оценок:
x1(0) = ϕ∗,
x2(0) =ϕ˙∗,
xj(0) = 0 ∀j = 3,8;
если учесть, что параметры c1 и c2 могут быть только положительными, то
x9(0) = 0,002 c-2; x10(0) = 0,005 c-2.
Для моделирования дискретных аналогов непрерывных белых шумов объ-
екта и измерителей принимались следующие среднеквадратические откло-
нения:
σw,1 = 1,5 · 10-5 c-2; σw,2 = 2 · 10-5 c-2; σw,3 = 2,2 · 10-6 c-2;
σw,4 = 1,8 · 10-6 c-2; σw,5 = 4,8 · 10-2 c-1; σw,6 = 3,6 · 10-2 c-1;
σv,1 = 2,6 · 10-4; σv,2 = 1,34 · 10-5 c-1.
Матрицы интенсивности белых шумов Qw и Qv приняты диагональными
вследствие отсутствия корреляции между шумами объекта и шумами в кана-
лах измерений. Элементы этих матриц вычисляются с помощью выражений
qw,kk = 2σ2w,kτ, k = 1,6 и qw,jj = 2σ2v,jτ, j = 1,2,
132
c1
a
б
1,0
c1
101
101
0,6
1
±2
±22
1
0,2
0
0
0,2
1
2
0,6
1
1,0
0
1
2
3
4
5
6
7
8
9
10
0
1
2
3
4
t, c
t, c
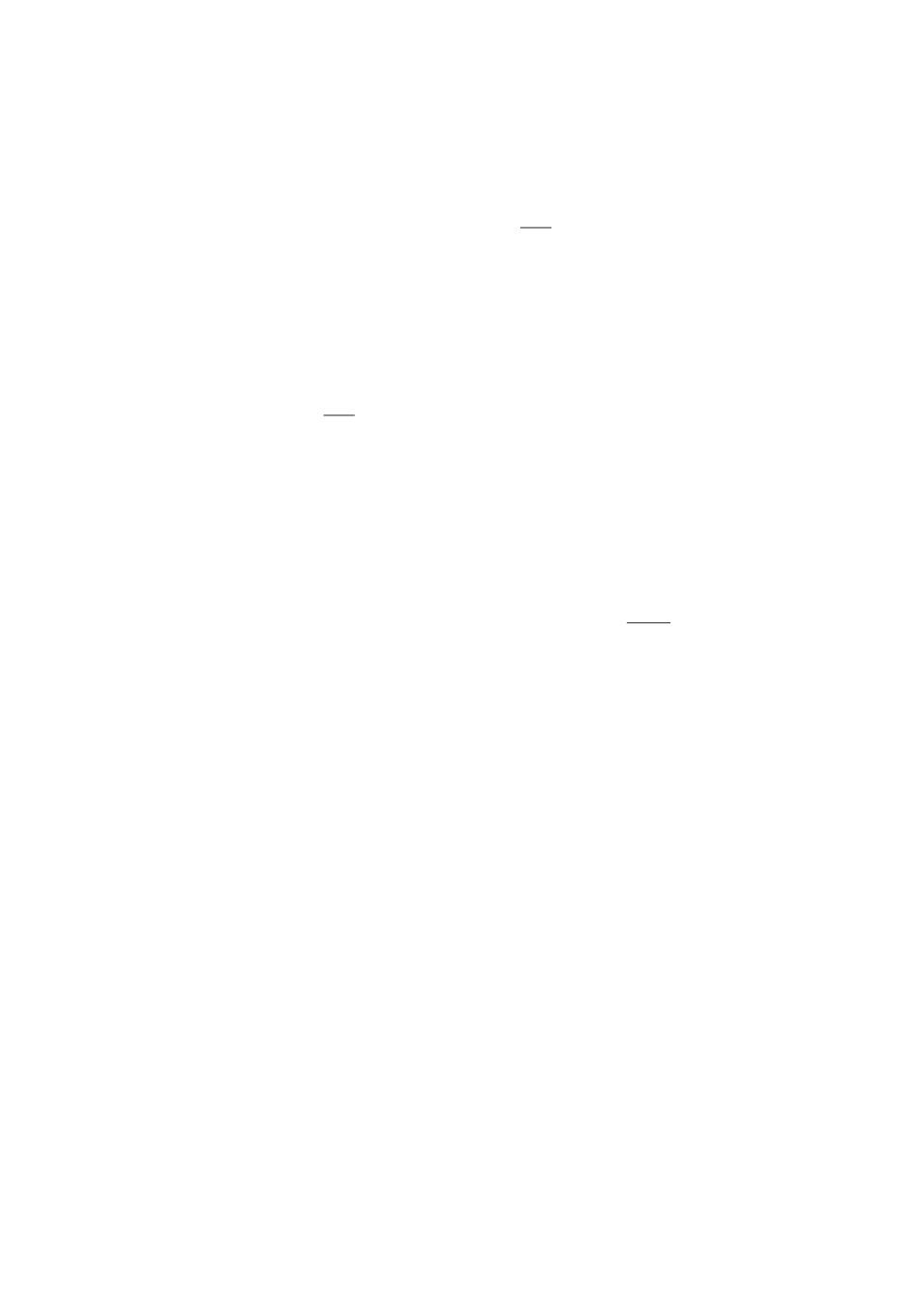
Рис. 1. Ошибки идентификации парциальных частот.
где τ — время корреляции, τ ≤ Δt, Δt — шаг интегрирования. При этом
приняты следующие значения:
qw,11 = 2,3 · 10-12 c-3; qw,22 = 0,49 · 10-14 c-3; qw,33 = 4,8 · 10-14 c-3;
qw,44 = 3,2 · 10-14 c-3; qw,55 = 2,3 · 10-6 c-3; qw,66 = 1,3 · 10-6 c-3;
qv,11 = 4,7 · 10-12 c; qv,22 = 2,9 · 10-13 c-1.
При статистическом моделировании дискретизация уравнений (14) про-
водилась с использованием метода Рунге-Кутты четвертого порядка с Δt,
который выбирался в диапазоне от 0,002 до 0,005 с.
На рис. 1 представлены графики ошибок идентификации неизмеряемых
парциальных частот Δωi(t) =
√ci -√ĉi(t), i = 1,2 с удвоенными средне-
квадратическими отклонениями, рассчитанными как соответствующие диа-
гональные элементы матрицы P (t): σw,1 = p-49,9, σw,2 = p-410,10. Из результатов
статистического моделирования следует, что время сходимости оценок пара-
метров c1 до 2% от максимальной величины начального значения составляет
в среднем от 3 до 6 с. При этом время сходимости оценок координат
ϕ
до 2% от их максимальных величин составляет в среднем 20-25 с.
С целью проверки возможности применения алгоритма (15) для активной
компенсации влияния колебаний упругих частей БКК на его угловую дина-
мику проведено математическое моделирование в режиме угловой стабилиза-
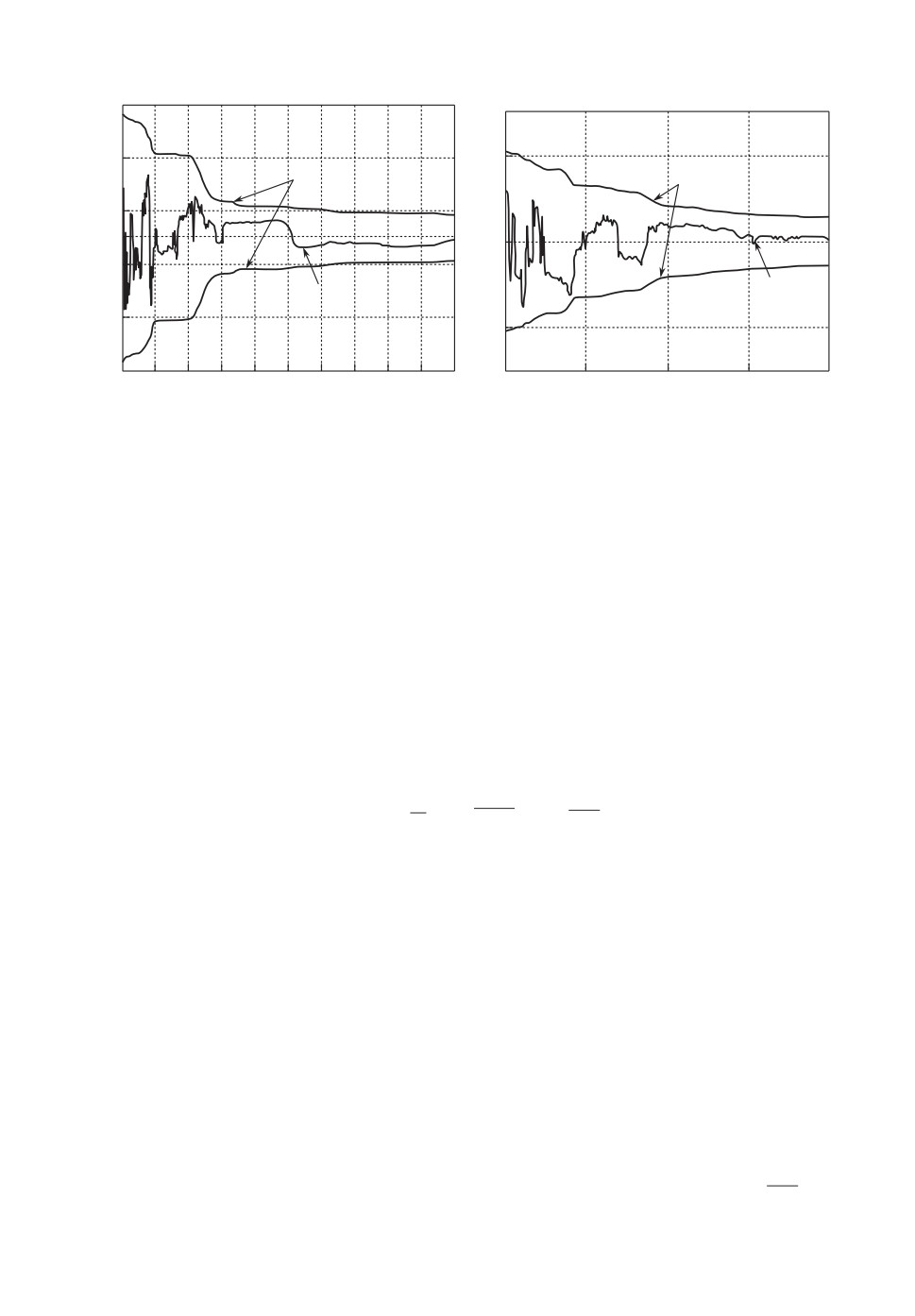
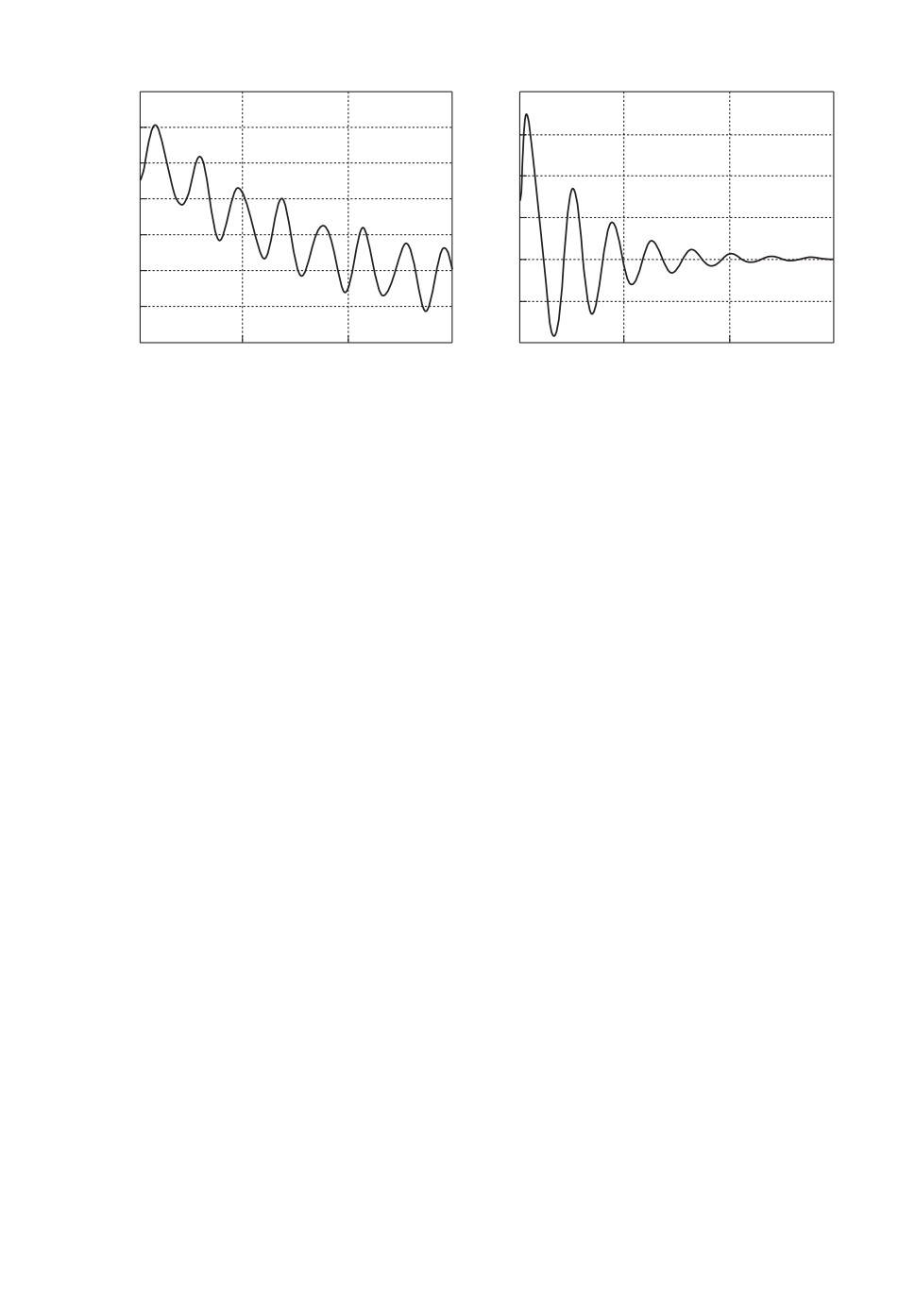
ции. Результаты сравнительного моделирования углового движения БКК по
координате ϕ с алгоритмом управления (7) и алгоритмом (15) представлены
на рис. 2.
На рис. 2,а представлены графики реальных значений ϕ (11), получен-
ных при использовании алгоритма (7) с p1,i = 0,017, p2,i = 0,01, i = 1, 2, на
рис. 2,б — при использовании алгоритма (15), в котором p1,i = 3,6, p2,i = 2,3.
133
, рад
a
k, рад
б
0,025
0,03
0,020
0,02
0,015
0,01
0,010
0
0,005
0,01
0
0,005
0,02
0
50
100
t, c
0
50
100
t, c
Рис. 2. Процессы стабилизации угла поворота конструкции.
В первом случае затухание упругих колебаний до 2% от максимального зна-
чения начального значения амплитуды происходит за ∼ 6000 с, во втором
случае при активной компенсации влияния упругих колебаний — за ∼ 80 с.
При моделировании процесса стабилизации угла поворота до 150 с (см.
рис. 2,б ) ошибки идентификации парциальных частот колебались в диапа-
зоне от 0,7 до 1,6% от истинных значений параметров ωi.
6. Заключение
При управлении угловым движением собираемой на орбите БКК, содержа-
щей упругие элементы, возникает проблема демпфирования колебаний при
отсутствии информации о новых механических параметрах собираемой кон-
струкции и начальных характеристиках, возникающих на каждом этапе сбор-
ки новых упругих компонент. Это требует обеспечения не только своевре-
менной смены стратегии оценивания и соответственно управления при пе-
реходе конструкции из одного класса механических систем в другой, но и
применения принципов адаптивного управления на интервале развития кон-
струкции внутри каждого этапа сборки выше первого. При необходимости на
этапе сборки должна решаться задача оптимизации коэффициентов в алго-
ритме (8) при координатах тонов упругих колебаний с точки зрения быстро-
действия.
Синтезированный алгоритм совместного оценивания координат углового
движения БКК, тонов упругих колебаний конструкции и их параметров поз-
воляет только по показаниям измерителей углового движения БКК в отсут-
ствие какой-либо объективной информации об упругих колебаниях получать
с высокой точностью оценки их неизмеряемых координат и параметров в ре-
альном времени.
Следует отметить, что при построении расширенного фильтра Калмана
для оценки координат движения и их параметров такой сложной механиче-
134
ской системы, как рассматриваемая в работе БКК зонтичного типа, требуется
использование полной ММ значительно более высокого порядка, в которой
учитывается взаимное влияние колебательных компонент. Такую задачу це-
лесообразно решать при разработке системы для конкретного варианта со-
бираемой конструкции с использованием соответствующего объема вычисли-
тельных средств. В данной работе рассматривается принципиальная возмож-
ность использования предлагаемого подхода для решения задачи оценивания
таких сложных динамических объектов.
Использование синтезированных алгоритмов (8) и (14) при сборке БКК
имеет ряд достоинств. Так, при установке первого упругого элемента раз-
мерность вектора состояния в алгоритме оценивания увеличивается на пять
неизмеряемых координат: две координаты тона упругих колебаний и три па-
раметра колебаний. Так как эти параметры длительное время остаются по-
стоянными, то после их идентификации они становятся известными и даль-
нейшая идентификация их нецелесообразна, тогда эти три параметра мож-
но исключить из вектора состояния. После установки следующего упругого
элемента указанное выше изменение размерности повторяется и вектор со-
стояния увеличивается на пять координат. После процедуры идентификации
следующих постоянных параметров вектор состояния также уменьшается на
следующие три координаты и т.д. Таким образом, вектор состояния после
идентификации параметров колебаний всех упругих элементов БКК увели-
чивается только на 2n координат, где n — количество установленных на БКК
упругих элементов.
Результаты статистического математического моделирования доказывают
возможность активной компенсации влияния колебаний упругих частей кон-
струкции БКК на динамику угловой ориентации и стабилизации самого БКК
с помощью управления вида (15). При моделировании алгоритма идентифи-
кации параметров a, b, c проверялись три варианта оценивания, в которых
выбирался один из трех параметров, а остальные два считались известными.
СПИСОК ЛИТЕРАТУРЫ
1. Акуленко Л.Д., Крылов С.С., Марков Ю.Г., Тун Тун Вин, Филиппова А.С. Ди-
намика космического аппарата с упругими и диссипативными элементами в
режиме ориентации // Изв. РАН. Теория и системы управления. 2014. № 5.
C. 106-115.
2. Геча В.Я., Гриневич Д.В., Чирков В.П., Канунникова Е.А. Влияние упругих
трансформируемых элементов конструкции на точность стабилизации космиче-
ского аппарата // Справочник. Инженерный журнал. 2013. № 5. С. 3-6.
3. Nurre G.S., Ryan R.S., Scofield H.N., Sims J.L. Dynamics and control of large space
structures // J. of Guidance, Control, Dynam. 1984. V. 7. No. 5. P. 514-526.
4. Рутковский В.Ю., Суханов В.М. Большие космические конструкции: модели,
методы исследования и принципы управления. Ч. 1 // АиТ. 1996. № 7. С. 52-65.
Rutkovsky V.Yu., Sukhanov V.M. Large Space Structure: Models, Methods of Study
and Control // Autom. Remote Control. 1996. V. 57. No. 7. Part 1. P. 953-963.
135
5.
Mikulas M.M., Collins T.J., Hedgepeth J.M. Preliminary design considerations for
10-40 meter-diameter precision truss reflectors // J. Spacecraft Rockets. 1991. V. 28.
No. 4. P. 439-447.
6.
Boning P., Dubowsky S. Coordinated control of space robot teams for the on-orbit
construction of large flexible space structures // Advanced Robotics. 2010. V. 24.
No. 3. P. 303-323.
7.
Белоножко П.П. Космическая робототехника для монтажа и сервиса. Потен-
циальные задачи, концепции перспективных систем // Воздушно-космическая
сфера. 2018. № 4. С. 84-97.
8.
Flores-Abad A., Ma O., Pham K., Ulrich S. A review of space robotics technologies
for on-orbit serving // Progr. Aerospace Scie. 2014. No. 68. P. 1-26.
9.
Papadopoulos E., Aghili F., Ma O., Lampariello R. Manipulation and capture in
space: A survey // Front. Robot. AI. 2021. No. 8. P. 1-36.
10.
Ishijima Yo., Tzeranis D., Dubowsky S. The on-orbit maneuvering of large space
flexible structures by free-flying robots // Pros. of the 8 Int. Symp. on Artificial
Intelligence, Robotics and Automation in Space (SAIRAS-2005), Munich, 5-8 Sept.,
2005, Noordwijk: ESTEC. 2005. P. 419-426. (ESA SP ISSN 1609-042X. No. 603).
11.
Тимаков С.Н., Жирнов А.В. Алгоритм активного демпфирования упругих ко-
лебаний конструкции Международной космической станции // Вестник МГТУ
им. Н.Э. Баумана. Сер. «Приборостроение». 2014. № 3. С. 37-53.
12.
Крутова И.Н., Суханов В.М. Особенности динамики управления деформируе-
мым космическим аппаратом в процессе его преобразования в большую косми-
ческую конструкцию // АиТ. 2008. № 5. С. 41-56.
Krutova I.N., Sukhanov V.M. Dynamic features of flexible spacecraft control in
process of its transformation into a large space structure // Autom. Remote Control.
2008. V. 69. No. 5. P. 774-787.
13.
Теория управления (дополнительные главы): Учебное пособие / под ред.
Д.А. Новикова. М.: ЛЕНАНД, 2019.
14.
Крутова И.Н., Суханов В.М. Синтез модифицированного PD-алгоритма управ-
ления угловым движением большой космической конструкции // АиТ. 2009. № 1.
С. 39-50.
Krutova I.N., Sukhanov V.M. Design of modified PD algorithm to control angular
motion of large space structure // Autom. Remote Control. 2009. V. 70. No. 1.
P. 33-42.
15.
Крутова И.Н., Суханов В.М. Синтез дискретной системы управления дефор-
мируемым космическим аппаратом, обеспечивающей робастную устойчивость
упругих колебаний // АиТ. 2009. № 7. С. 25-36.
Krutova I.N., Sukhanov V.M. Design of discrete control system of flexible spacecraft
maintaining robust stability of elastic oscillations // Autom. Remote Control. 2009.
V. 70. No. 7. P. 1109-1119.
16.
Rutkovsky V.Yu., Sukhanov V.M., Zemlyakov S.D., Glumov V.M. Models
and methods of control of large space structures with discretely changing
construction // Proceedings of International Conference on Nonlinear Problems in
Aviation and Aerospace (ICNPAA-2008). Cambridge Scientific publishers. Ed. by
S. Sivasundaram. 2009. Plenary paper, chapter 12. P. 115-142.
17.
Глумов В.М., Крутова И.Н., Суханов В.М. Адаптивная система управления на
основе нечеткой логики для большой космической конструкции в процессе ее
сборки на орбите // АиТ. 2004. № 10. С. 109-127.
136
Glumov V.M., Krutova I.N., Sukhanov V.M. Fuzzy Logic-based Adaptive Control
System for In-orbit Assembly of Large Space Structures // Autom. Remote Control.
2004. V. 65. No. 10. P. 1618-1634.
18.
Rutkovsky V.Yu., Glumov V.M., Sukhanov V.M. New Adaptive Algorithm of
Flexible Spacecraft Control // Complex Systems. Relationships between Control,
Communications and Computing. Dordrecht, The Netherlands: Springer Interna-
tional Publishing. 2016. P. 313-326.
19.
Kalman R.E., Bucy R. New Results in Linear Filtering and Prediction Theory //
Trans. ASME. J. Basic Eng. 1961. V. 83D. P. 95-108.
20.
Ермилов А.С., Ермилова Т.В. Оценивание ненаблюдаемых координат упругих
колебаний больших космических конструкций с гиросиловым приводом // АиТ.
2013. № 9. С. 143-156.
Ermilov A.S., Ermilova T.V. Estimating Nonmeasurable Coordinates of Elastic
Oscillations for Large Space Constructions with a Gyroforse Engine // Autom.
Remote Control. 2013. V. 74. No. 9. P. 1545-1556.
21.
Глумов В.М., Крутова И.Н., Суханов В.М. Метод построения математической
модели дискретно развивающейся большой космической конструкции // АиТ.
2003. № 10. С. 15-33.
Glumov V.M., Krutova I.N., Sukhanov V.M. A Method of Constructing the
Mathematical Model of a Discretely Developing Large Space Structure // Autom.
Remote Control. 2003. V. 64. No. 10. P. 1527-1543.
22.
Глумов В.М., Крутова И.Н., Суханов В.М. Особенности гиросиловой стабили-
зации собираемой на орбите большой космической конструкции // Проблемы
управления. 2016. № 1. С. 82-89.
Glumov V.M., Krutova I.N., Sukhanov V.M. Some Features of Powered Gyrostabi-
lization of a Large Space Structure Assembled in Orbit // Autom. Remote Control.
2017. V. 78. No. 12. P. 1345-1355.
23.
Динамика и управление космическими объектами / под ред. В.М. Матросова,
М.Ф. Решетнева, Новосибирск: Наука. Сиб. отд-ние РАН, 1992.
24.
Glumov V.M. Adaptive Control of Free-Flying Space Manipulation Robot in the
Working Area when Assembling a Large Space Structure in Orbit // Proceedings
of the 12th International Conference “Management of Large Space System Develop-
ment” (MLSD) M: IEEE. 2019. P. 1-4.
https//ieeeexplore.ieee.org/document/8911089
Статья представлена к публикации членом редколлегии А.И. Матасовым.
Поступила в редакцию 12.10.2022
После доработки 06.02.2023
Принята к публикации 30.03.2023
137