БИОФИЗИКА, 2021, том 66, № 3, с. 516-545
БИОФИЗИКА СЛОЖНЫХ СИСТЕМ
УДК 577.3
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
С УБЕЖИЩЕМ ДЛЯ ЖЕРТВЫ
ПРИ НАЛИЧИИ ДОПОЛНИТЕЛЬНОЙ ПИЩИ
© 2021 г. С. Мондал, Г.П. Саманта
Индийский Институт инженерных наук и технологии, Шибпур, Ховрах-711103, Индия
E-mail: sudeshnamondal43@gmail.com, gpsamanta@math.iiests.ac.in
Поступила в редакцию 26.06.2020 г.
После доработки 08.07.2020 г.
Принята к публикации 25.07.2020 г.
В ходе полевых экспериментов на наземных позвоночных было замечено, что прямое нападение
при взаимодействии хищника и жертвы может не только повлиять на динамику популяции, но и
косвенно повлиять на страх хищника (ощущаемый жертвой) через химические и/или голосовые
сигналы, может также снизить воспроизводство жертвы и изменить ее историю жизни. В настоящей
работе исследовано влияние страха на жертву с помощью системы «хищник-жертва» Беддингтона-
ДеАнгелиса, включающей убежище жертвы и наличие дополнительной пищи. Во-первых, обсужде-
на положительность и равномерная ограниченность решений, которые делают предлагаемую си-
стему хорошо работающей. Вводятся критерии существования, анализ локальной и глобальной
устойчивости всех состояний равновесия. Далее представлены условия возникновения транскрити-
ческих бифуркаций. Кроме того, изучен устойчивый характер точки равновесия сосуществования
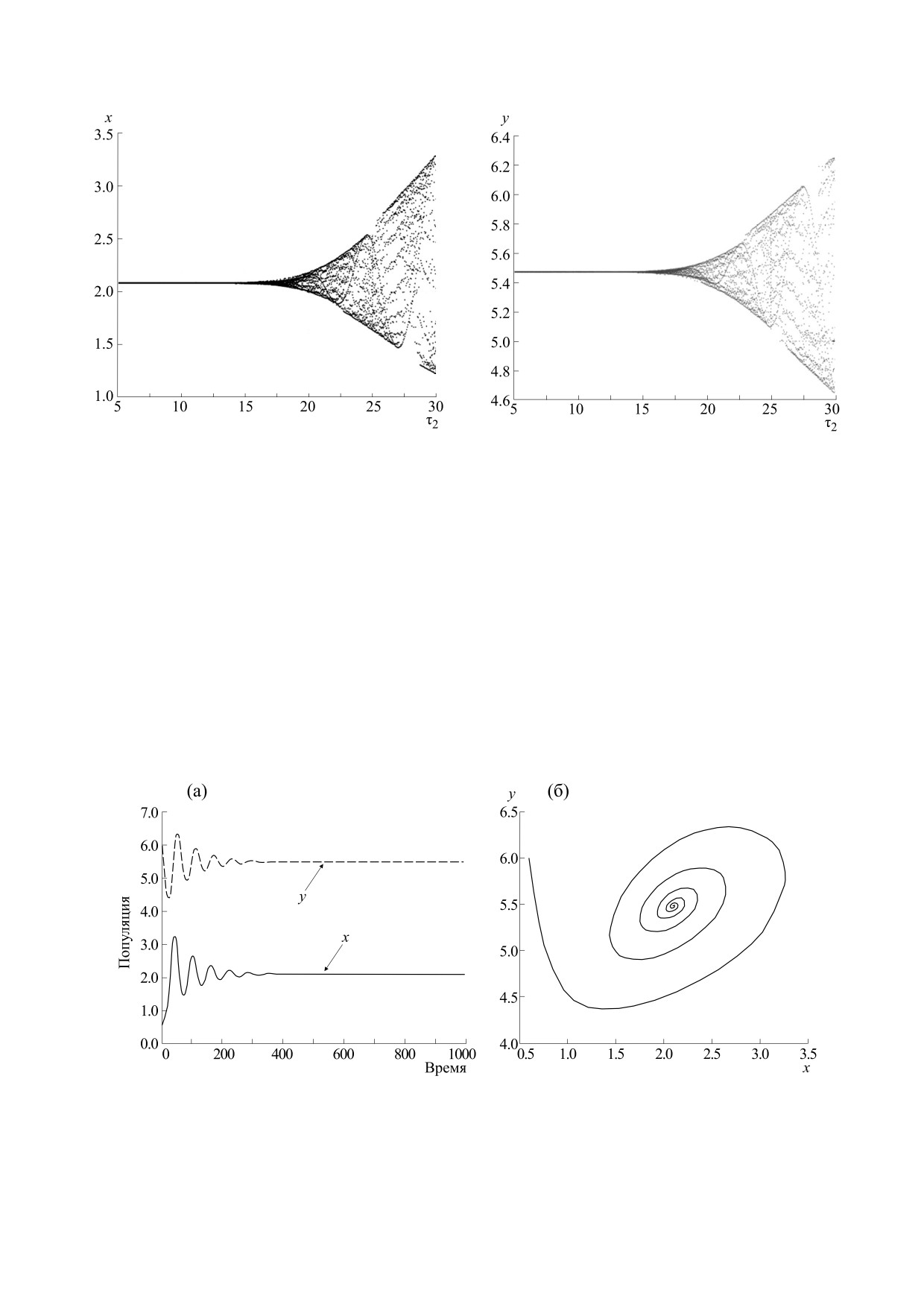
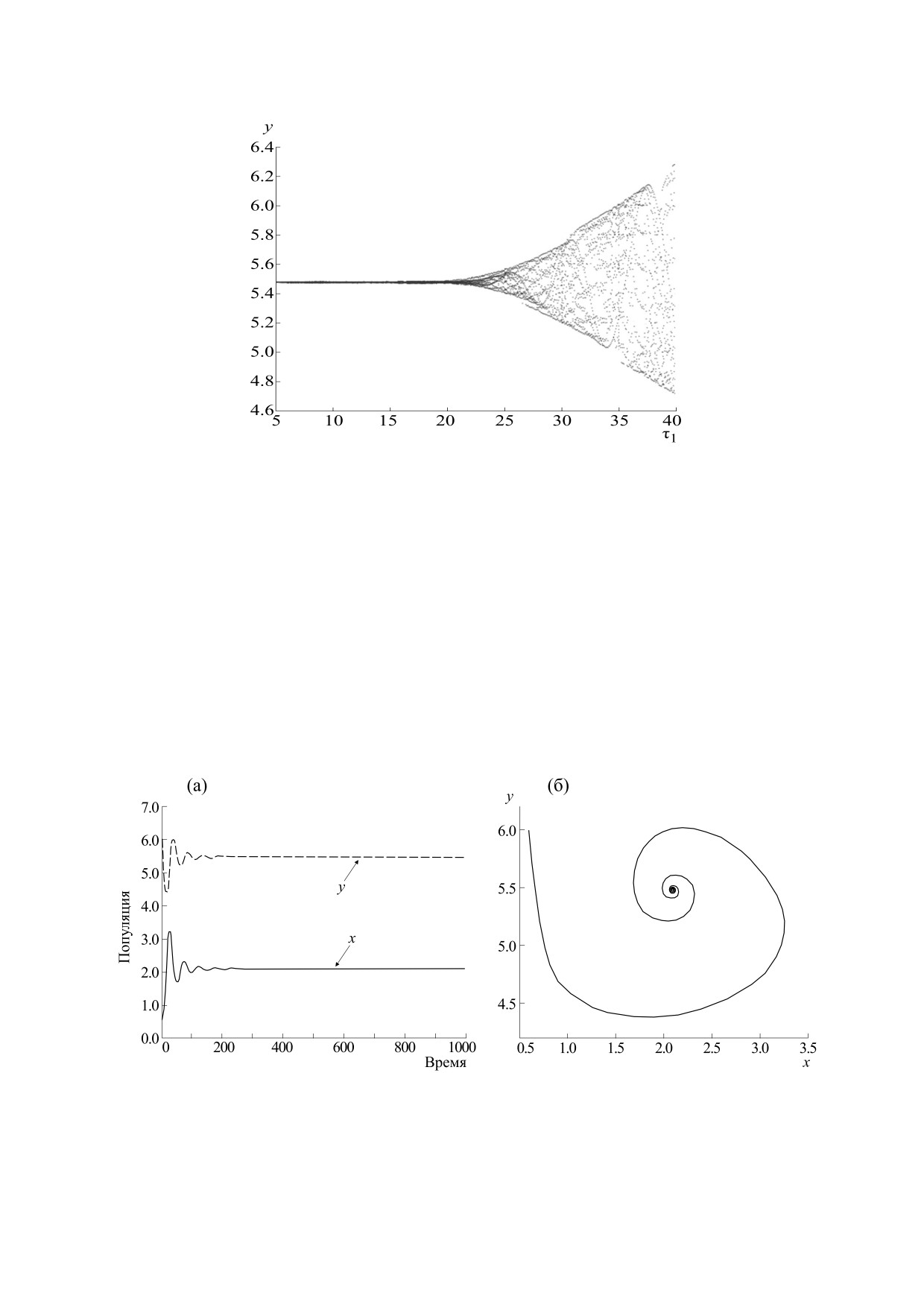
для различных комбинаций факторов задержки; обнаружено, что непрерывное увеличение пара-
метров задержки может переключить стабильность равновесия со стабильной спирали на стабиль-
ные колебания предельного цикла через сверхкритическую бифуркацию Хопфа. Для проверки ана-
литических результатов с помощью MATLAB было выполнено обширное численное моделирова-
ние. Численно влияние убежища добычи на выживание хищника было представлено с помощью
введения дополнительной пищи.
Ключевые слова: убежище жертвы, эффект страха, дополнительная пища; локальные бифуркации,
глобальная стабильность, временные задержки.
DOI: 10.31857/S0006302921030133
1. ВВЕДЕНИЕ
нальными реакциями Холлинга II типа (за-
висимыми только от жертвы) [3-5], функцио-
В экологии и эволюционной биологии одной
нальными реакциями Беддинга-ДеАнгелиса (за-
из важных тем является взаимодействие хищника
висимыми как от жертвы, так и от хищника, без
и жертвы, которое преобразует энергию с одного
сингулярности на низком уровне размера попу-
трофического уровня на более высокие трофиче-
ляции) [6, 7] и функциональными реакциями, за-
ские уровни. В целом размер популяции жертвы и
висящими от соотношения хищников и жертв
структура сообщества могут регулироваться хищ-
(зависимости как жертв, так и хищников с сингу-
никами. Иногда влияние хищников на виды до-
лярностью при малом размере популяции) [8].
бычи может варьироваться в зависимости от раз-
Однако в этих исследованиях хищник убивает до-
личных ситуаций. Оно может быть прямым и
бычу напрямую. Но недавние полевые экспери-
смертельным, а может быть косвенным и не ис-
ментальные исследования показали, что косвен-
требляющим. В случае прямого воздействия хищ-
ное воздействие (эффект страха) на виды-жертвы
ник съедает добычу [1], и это давняя точка зрения
более эффективно, чем прямое воздействие на
в модели «хищник-жертва». В случае косвенного
динамику популяций экологических систем [9,
воздействия страх перед хищником наводится на
10]. Страх перед хищником (ощущаемый добы-
популяцию жертвы и, как следствие, влияет на
чей) создает психологический стресс для жертв,
уровень рождаемости и вызывает изменения в по-
поскольку они всегда опасаются возможного на-
ведении жертвы [2].
падения. В результате снижается скорость вос-
В литературе есть много исследовательских
производства добычи и изменяется ее жизненный
работ по моделям «хищник-жертва» с функцио- цикл. В подтверждение этого упоминается, что в
516
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
517
экосистеме Большого Йеллоустоуна волки (Canis
кацию Хопфа выше критического значения за-
lupus) влияют на репродуктивную физиологию
держки [18]. Следовательно, включение времен-
лося (Cervus elaphus) [11]. Когда виды-жертвы рас-
ных задержек делает нашу предлагаемую систему
познают сигнал хищника (химический/голосо-
более реалистичной, чем система без задержки.
вой), они тратят больше времени на то, чтобы
Данная работа организована следующим обра-
внимательно следить за обнаружением опасно-
зом: Раздел «Конфигурация модели» посвящен
сти, а не на поиски пищи. Таким образом, рожда-
формулировке предлагаемой системы на основе
емость испуганной жертвы снижается, и она при-
некоторых биологических допущений. В разделе
меняет некоторые механизмы выживания, такие
«Положительность и равномерная ограничен-
как голодание [9, 12]. Например, некоторые пти-
ность» мы доказали положительность и равно-
цы реагируют на звук хищника путем защиты от
мерную ограниченность решений системы. Усло-
хищников [9, 12] и убегают из своих гнезд при
вия равномерной непрерывности изучаются в
первых признаках опасности [12]. Такое поведе-
разделе «Равномерная устойчивость». В следую-
ние против хищников может повлиять на выжи-
щем разделе («Критерии вымирания») мы обсу-
вание и воспроизводство птиц [12]. Эксперимен-
дили критерии вымирания обеих популяций. Раз-
тально исследовано, что при отсутствии прямого
дел «Точки равновесия и анализ их устойчивости»
умерщвления воспроизводство потомства певчих
описывает критерии выполнимости и анализ ло-
воробьев (Melospiza melodia) может быть уменьше-
кальной устойчивости всех положений равнове-
но на 40% в результате воздействия чувства стра-
сия вместе с анализом глобальной устойчивости
ха, создаваемого хищником [10]. Таким образом,
каждого из положений равновесия и условиями
это сокращение, вызванное антихищническим
возникновения локальных бифуркаций для каж-
поведением, влияет на рождаемость и выживае-
дого граничного равновесия. В разделе «Влияние
мость потомства. Следовательно, цена страха
дискретных временных задержек» мы проанали-
(помимо прямого хищничества) должна быть
зировали природу устойчивости и существование
внесена во взаимодействие хищник-жертва. В
сверхкритической бифуркации Хопфа в точке
2016 г. авторы работы [13] впервые предложили
равновесия сосуществования при различных
математическую модель взаимодействия хищни-
комбинациях параметров запаздывания (τ1 и τ2).
ка и жертвы, рассматривая страх хищника у ви-
В следующем разделе («Численное моделирова-
дов-жертв, когда рождение жертв снижается из-
ние»)мы подтвердили аналитические выводы с
за уровня страха (ощущаемого жертвой). В работе
помощью численных расчетов с использованием
[14] авторы исследовали динамику модели с за-
MATLAB. Наконец, в последнем разделе дается
держкой «хищник-жертва» с влиянием эффекта
краткое заключение.
страха при наличии дополнительной пищи. В
2019 г. авторы работы [15] изучали влияние эф-
фекта страха в системе хищник-жертва, включа-
2. КОНФИГУРАЦИЯ МОДЕЛИ
ющей убежище для добычи. Недавно в работе [16]
При построении предлагаемой системы мы де-
была проанализирована динамика модели с за-
лаем следующие допущения.
держкой «хищник-жертва» с учетом нелинейной
функции убежища жертвы под влиянием эффек-
1. Популяция добычи растет по логистической
та страха и дополнительной пищи.
кривой в отсутствие хищника, что регулируется
следующим дифференциальным уравнением:
В данной статье мы исследовали эффект стра-
ха в системе «хищник-жертва», включающей
2
dx = rx − d
x − a
x
,
(2.1)
1
1
убежище жертвы с функциональной реакцией
dt
Беддингтона-ДеАнджелиса в присутствии до-
где x представляет популяцию жертвы в момент
полнительной пищи. На самом деле добыче тре-
времени t, r - коэффициент рождаемости добы-
буется некоторое время для оценки риска нападе-
чи, d1 - коэффициент естественной смертности
ния хищников после улавливания химических
жертвы, а1 - коэффициент смертности из-за
и/или голосовых сигналов. Также хищник не мо-
жет мгновенно переваривать пищу. Требуется не-
внутривидовой конкуренции между особями
которое время задержки, известное как задержка
жертвы.
беременности. Итак, в предлагаемой модели мы
Пусть у - биомасса хищника.
включили временную задержку τ1 в уменьшен-
Чтобы учесть эффект страха, мы умножаем мо-
ную рождаемость жертвы из-за страха хищника и
нотонно убывающую функцию φ(k,y) = 1/(1 + ky)
временную задержку τ2 в член взаимодействия
[29] на коэффициент рождаемости (r) популяции
[17]. Обычно экологическая система дестабили-
жертв, где k представляет собой уровень страха,
зируется из-за запаздывания.
снижающий рождаемость добычи. Функция
φ(k,y) удовлетворяет следующим условиям :
Система теряет свою устойчивость и претерпе-
вает колебания предельного цикла через бифур-
(i)φ(0,y) = 1,
БИОФИЗИКА том 66
№ 3
2021
518
МОНДАЛ, САМАНТА
(ii) φ(k,0) = 1,
dx
rx
2
=
-
d
1
x - a
1
x
−
dt
1+
ky
(iii)
lim
φ(k,y)
=
0,
k→∞
a
2
(1 −
m
)xy
−
,
(2.2)
(iv)
lim
φ(k,y)
=
0,
1+ αηA+b
(1 −
m)x + ey
→∞
y
ca
{(
1
−
m
)
x
+ηA
}y
2
dy
∂φ
(k,y)
=
−
d
2
(v)
<
0,
dt
1+ αηA
+
b
(
1
−
m)x + ey
∂k
Начальные условия:
∂φ
(k,y)
(vi)
<
0.
x(0) > 0, y(0) > 0.
(2.3)
∂y
Здесь d2 - естественная смертность хищника,
Модифицируем дифференциальное уравне-
а2 - максимальная скорость потребления хищни-
ние (2.1):
ком, b отражает время взаимодействия хищника с
dx
rx
2
жертвой, c - коэффициент преобразования, член
=
-
d
1
x - a
1
x
dt
1+
ky
ηA обозначает эффективный уровень пищи,
а представляет качество дополнительной пищи, a
2. Хищнику предоставляется дополнительный
e интерпретирует взаимное вмешательство между
корм постоянной биомассы А, которая равномер-
хищниками.
но распределена в естественной среде. Количе-
Лемма 2.1 [26]. Предположим, что a1 > 0 и b1 > 0
ство встреч одного хищника с дополнительной
пищей пропорционально биомассе дополнитель-
при x(0) > 0, тогда (i) для дифференциального не-
ной пищи. Константа пропорциональности ха-
a1
равенства
dx ≤ x t)(
a1
−
b
1
x t))
,lim
x t)
≤
и (ii)
рактеризует способность хищника идентифици-
t→∞
dt
b1
ровать дополнительную пищу [19-21].
для
дифференциального
неравенства
3. Убежище жертвы - это концепция, которая
a
1
dx ≥ t)(a
−
b
x t))
,
lim
x t)
≥
1
1
может защитить популяцию жертвы от хищни-
t
→∞
dt
b
1
ков, путем укрытия в местах, где их нелегко найти
или недоступных для хищников. Если количество
mx жертв не подвержено риску хищничества, где
3. ПОЛОЖИТЕЛЬНОСТЬ И РАВНОМЕРНАЯ
параметр убежища жертвы m ∈ (0,1), тогда хищ-
ОГРАНИЧЕННОСТЬ
нику доступно x(1 - m) жертв для истребления
Теорема 3.1. Каждое решение системы (2.2) с
[22].
(2.3) однозначно существует и положительно в
4. Хищник потребляет и добычу, и дополнитель-
(0, ∞) для всех t ≥ 0.
ную пищу в соответствии с функциональной реак-
Доказательство. Решение (x(t), y(t)) уравнения
цией Беддингтона-ДеАнгелиса [6, 7, 23, 24, 25].
(2.2) с начальными условиями (2.3) существует и
На основе этих допущений можно сформулиро-
единственно в (0, ξ), где 0 < ξ ≤ +∞ [27].
вать предлагаемую модель следующим образом:
Из (2.2) и (2.3) следует:
t
⎡
⎤
⎧
r
a
2
(1
−
m y(s
)
⎫
x t)
=
x
(0)exp
⎢
⎨
-
d
1
−
a
1
x s)
−
⎬
ds⎥ >
0,
∫
1
+
ky s)
1+
αηA+b(1−
m)
x x)
+
ey s)
0
⎣
⎩
⎭
⎦
t
⎡
⎧
ca
1−
m
x s)
+
ηA
⎫
⎤
{(
)
}
2
y t)
=
y
(0)exp
⎢
⎨
−
d
2
⎬ds
⎥ >
0.
∫
1
+
αηA+b
(
1
−
m
)
x s)
+
ey(s)
⎭
⎦
⎣0 ⎩
Следовательно, система (2.2) положительно
Доказательство. Из (2.2) имеем:
инвариантна для всех t ≥ 0.
dx
rx
2
≤
-
d
x - a
x
,
1
1
dt
1
+
ky
Теорема 3.2. Все решения системы (2.2), кото-
2
рые начинаются внутри положительного квадран-
dx ≤ rx − d
1
x − a
1
x
,
dt
та (в двумерном пространстве), равномерно огра-
dx ≤ x
[(
r − d
1
)
−
a
1
x
]
ничены, если d2(1 + αηA) > ca2ηA.
dt
БИОФИЗИКА том 66
№ 3
2021
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
519
Используя лемму 2.1, получим:
r − d
1
lim
x t)
≤
t→∞
a
1
Теперь имеем:
dW dx
1dy
y
=
+
,
где
W =x
+
dt
dt c dt
c
2
a
(1 −
m
)xy
a
{(
1−
m)x
+
ηA}y
d
y
2
2
2
∴dW = rx −d
1
x − a
1
x
−
+
−
,
dt
1+
ky
1+
αηA +b(1−
m)x + ey
1+
αηA
+
b(1−
m)x + ey c
dW rx
2
a
ηAy
d
y
2
2
⇒
=
-
d
x - a
x
+
−
,
1
1
dt
1
+
ky
1
+
αηA +b(1−
m)x + ey c
dW
a
2
ηAy d
2
y
≤
rx - d
x
+
−
,
1
dt
1
+
αηA c
dW
y⎡
ca
2
η
A
⎤
≤
rx - d
1
x
−
d
2
−
⎢
⎥
dt
c
⎣
1+
αηA
⎦
dW
⎛r - d
⎞
⎧
⎛
ca
η
A
⎞⎫
1
2
+
ξW ≤r
Пусть
ξ = min
d
,
d
−
при условии
⎜
⎟
⎨
1
⎜
2
⎟⎬
⎩
⎝
1+
αη
A
⎠⎭
dt
⎝
a
1
⎠
rx
r − d
1
d2(1
+ αηA)
> ca2ηA. Тогда (для большого (поскольку
≤
rx
и
limx t)
≤
).
t→∞
1
+
ky
a
1
времени t) имеем:
Используя неравенство Гронвалла, получим:
⎛r - d
1
⎞
-ξt
−ξ
t
0
<
W xt)
, y t))
≤
r
1
−
e
+
e
W x(0)
, y
(0))
⎜
⎟
(
)
⎝
a1
ξ
⎠
⎛
r - d
⎞
1
∴0
<
W xt),y t))
≤
r
, при
t
→ ∞
⎜
⎟
⎝
a
1
ξ
⎠
Таким образом, все решения системы (2.2) входят в область:
⎧
r - d
1
⎛r - d
1
⎞⎫
B
=
(
x
, y)
:0
<
x t)
≤
;0
<
W xt),y t))
≤
r
(3.1)
⎨
⎜
⎟⎬
⎩
a
1
⎝
a
1
ξ
⎠⎭
Следовательно, система
(2.2) равномерно
Теорема 4.1. Система (2.2) с (2.3) равномерно
ограничена при всех t ≥ 0.
устойчива при условии
a
(1 -
m)
r
2
−
d
1
−
>
0
4. РАВНОМЕРНАЯ УСТОЙЧИВОСТЬ
1
+
kM
c
2
В математической экологии постоянство озна-
и (ca2 - bd2)(1 - m)κ - d2 (1 + αηA) + ca2ηA > 0,
чает долгосрочное выживание в будущем всех по-
где выражения для M2 и κ указаны в доказатель-
пуляций, которые существуют изначально.
стве.
Определение: Система (2.2) называется равно-
Доказательство.
мерно устойчивой (постоянной или сильно
устойчивой), если существует ε > 0 такое что
a
1-
m
xy
dx
rx
2
2
(
)
=
-
d
x - a
x
−
,
(x(t),y(t)) из (2.2) удовлетворяет условиям:
1
1
dt
1+
ky
1
+
b(1
−
m)x + ey
+αηA
liminfx t)
≥
ε
и liminf
y t)
≥
ε
dx
rx
2
a
2
(1 −
m)x
t→∞
t→∞
>
-
d
1
x - a
1
x
−
,
при любом
x
(0
)
>
0,
y
(0)
>
0.
dt
1
+
ky
e
dx
rx
2
a
(1
−
m)x
Сформулируем и докажем теорему о постоян-
2
≥
-
d
x - a
x
−
1
1
стве системы (2.2).
dt
1
+
kM
2
e
БИОФИЗИКА том 66
№ 3
2021
520
МОНДАЛ, САМАНТА
⎛r - d
⎞
1
(поскольку
y ≤ M
=
cr
при большом вре-
a
(1 -
m)
2
⎜
⎟
r
2
Предположим, что
−
d
−
>
0.
⎝
a
1
ξ
⎠
1
1+
kM
2
e
мени),
dx
⎡⎛
r
a
2
(1-m)⎞
⎤
Таким образом, согласно лемме 2.1, имеем:
=
x
−d
−
−a
x
⎢⎜
1
⎟
1
⎥
dt
⎣⎝1+kM
2
e
⎠
⎦
1
⎡
r
a
2
(1−
m)⎤
liminf
x t)
>
-
d
1
−
=κ
(предположим)
t→∞
⎢
⎥
a
1
⎣1+
kM
2
e
⎦
∴x t)
> κ(при большом времени
t)
dy
ca
2
[(
1
−
m
)x
+ηA]y
=-d
y
+
,
2
dt
1
+ αηA
+
b(
1−
m)x +ey
dy
y
=
[ca
2
(
1−
2
m)x+caηA−d −bd
2
2
(1−
m)x-d ey
2
−αηAd
2
],
dt
1+
b(
1−
m)x +ey
+
αηA
dy
y
=
[(
ca -bd
)(1
−
m)
x -d
ey + ca
ηA−d
−α
ηAd
],
2
2
2
2
2
2
dt
1+
b(1
-
m
)x
+
ey
+
αηA
dy
y
≥
[(ca
2
−
bd
2
)(
1
−
m
)κ+
ca
2
ηA
−(1+αη
A)d
2
−
d
2
ey
],
dt
1+
σ
M
+
αη
A
⎛r - d
1
⎞
(где σ
=
max b(
1−
m
)
,
ce
})
и
M =r
⎜
⎟
⎝
a1ξ
⎠
dy
∴
≥
y
(
L
−
L
y)
,
1
2
dt
(ca
2
−
bd
2
)(
1
−
m
)
κ-
d
2
(1
+
αηA)+
ca
2
ηA
где
L
1
=
,
1
+
σ
M
+
αη
A
de
2
L
2
=
1
+
σ
M
+
αηA
L
Это завершает доказательство.
1
Используя лемму 2.1, получим:
liminfy t)
≥
t→∞
L
2
при условии (ca2 - bd2)(1 - m)κ - d2(1 + αηA) +
+ ca2ηA > 0.
5. КРИТЕРИИ ВЫМИРАНИЯ
⎧
L
1
⎫
Выберем
ε
=
min⎨
κ
,
⎬
>
0.
Тогда
Теорема 5.1. Если r < d1, то
lim
x t)
=
0.
L
t→∞
2
⎩
⎭
liminf
x t)
≥ε
и
liminf
y t)
≥ε
t
→∞
t→∞
Доказательство. Имеем
t
⎡
⎤
dx
rx
≤
-
d
1
x ≤ rx − d
1
x
⇒
x t)
≤
x
(0)exp⎢
(
r - d
1
)ds⎥
∫
dt
1+
ky
⎣
0
⎦
∴lim
x t)
=
0 при
r
<
d
1
t
→∞
ca
2
⎧
⎛
r - d
1
⎞
⎫
Теорема 5.2. Если
1
(
−
m
)
+
η
A⎬< d
,
то
lim
y t)
=
0.
⎨
⎜
⎟
2
t
→∞
1
+α
η
A
⎩
⎝
a
1
⎠
⎭
БИОФИЗИКА том 66
№ 3
2021
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
521
Доказательство. Имеем
dy
ca
2
≤
[(
1−
m)x
+
ηA
]
y - d
2
y
dt
1+α
ηA
dy
ca
2
⎛
⎛r - d
1
⎞
⎞
≤
(1 −
m)
+
ηA⎟y -d
y
⎜
⎜
⎟
2
dt
1+
αηA⎝
⎝
a
1
⎠
⎠
t
⎡
⎤
⎧
ca
⎛
⎛r - d
⎞
⎞
⎫
2
1
⇒
y t)
≤
y(0)exp⎢
(1 −
m
)
+
ηA⎟-d
ds⎥
∫
⎨
⎜
⎜
⎟
2
⎬
⎩1+
αηA⎝
⎝
a
⎠
⎠
⎭
⎣
0
1
⎦
ca
⎧
⎛
r - d
⎞
⎫
2
1
∴lim
y t)
=
0, если
(1
−
m)
+
ηA⎬< d
⎨
⎜
⎟
2
t→∞
1+
αηA⎩
⎝
a
1
⎠
⎭
6. ТОЧКИ РАВНОВЕСИЯ
a
(1 −
m)y
r
2
И АНАЛИЗ ИХ УСТОЙЧИВОСТИ
−
d
1
−
a
1
x
−
=
0,(6.1)
1+
ky
1+
αη
A+b(1−
m)x + ey
Равновесие. Тривиальное равновесие: E0(0,0) су-
ca
((
1
−
m)
x
+
ηA)
2
ществует всегда.
−
d
=
0.
(6.2)
2
1
+
αηA
+
b
(1 -
m
)x
+
ey
⎛r - d
1
⎞
Осевое равновесие (без хищников):
E
,0
Из уравнения (6.2) получаем первую компо-
1
⎜
⎟
⎝
a
1
⎠
ненту E*(x*,y*) в виде
существует при условии r > d1.
*
d
1+
αη
A +ey
−
ca
ηA
*
2
(
)
2
Осевое равновесие (без жертв):
E
2
(0, y)
суще-
x
=
,
ствует, если ca2ηA
> d2(1
+ αηA), где
(ca
2
-
bd
2
)(1 −
m)
ηA
ca
−
αd
−
d
где x* существует, если ca2 > bd2 и d2(1 + αηA + ey*) >
(
2
2
)
2
y
=
> ca2ηA и y* - единственный положительный ко-
ed
2
рень уравнения B1y3 + B2y2 + B3y + B4 = 0.
Внутреннее равновесие: E*(x*,y*) может быть
получено решением уравнений:
Здесь
B1 = -a1d2ekp6,
B2 = (-d1p1k - a1p2k)p6 - p5k - a1d2ek(p3 + p4) - a1d2ep6,
B3 = [-d1p1k - a1p2k - a1d2e](p3 + p4) + rp1p6 - p5 - (d1p1 + a1p2)p6,
B4 = (rp1 - d1p1 - a1p2)(p3 + p4),
где
ний равновесия. Матрица Якоби J0 при E0(0, 0)
p1 = (ca2 - bd2)(1 - m),
имеет следующий вид:
p2 = d2(1 + αηA) - ca2ηA,
⎡r - d
1
0
⎤
⎢
⎥
p3 = (1 + αηA)p1,
J
=
ca
ηA
0
2
⎢
0
−
d2
⎥
⎣
1+ αη
A
⎦
p4 = b(1 - m)p2,
ca
2
ηA
Собственные значения J0: r - d1 и
−
d
2
p5 = a2(1 - m)p12,
1+ αη
A
Теорема
6.1. E0 локально асимптотически
p6 = ep1 + b(1 - m)d2e.
устойчиво, если r < d1 и ca2ηA < d2{1 + αηA} и не-
Анализ локальной устойчивости. Теперь обсу-
устойчиво, если либо r > d1 или ca2ηA > d2{1 +
дим анализ локальной устойчивости всех состоя-
+ αηA}.
БИОФИЗИКА том 66
№ 3
2021
522
МОНДАЛ, САМАНТА
⎛r - d
⎞
1
Матрица Якоби J1 при
E
,0
имеет вид:
1
⎜
⎟
⎝
a
1
⎠
⎡
⎧
⎫⎤
⎢
⎪
⎪⎥
r - d
⎪
a
(1 −
m)
⎪
1
2
⎢-r + d
−rk
−
⎥
1
⎨
⎬
⎢
a
1
⎛r - d
1
⎞
⎥
⎪
1+
αηA+b(1−
m)
⎪
⎜
⎟
⎢
⎩
⎭⎥
⎝
a
1
⎠
J
1
= ⎢
⎥
⎛
⎛r - d
⎞
⎞
⎢
1
⎥
ca
(1 −
m)
+
ηA
2
⎜
⎜
⎟
⎟
⎢
⎥
⎝
⎝
a
1
⎠
0
⎠ -
d
⎢
2
⎥
⎛r - d
1
⎞
⎢
1+
αηA+b
(1 −
m)
⎥
⎜
⎟
⎣
a
⎦
⎝
⎠
1
Мы видим, что одно собственное значение -
⎛
⎛
r - d
1
⎞
⎞
это r + d1 (и оно меньше нуля), а другое собствен-
ca
(1
−
m
)
+
ηA
2
⎜
⎜
⎟
⎟
⎝
⎝
a
1
⎠
⎠ <
d
2
и неустойчиво при
⎛
r - d
1
⎞
1+
αηA+b(1−
m
)
⎜
⎟
⎛
⎛
r - d
1
⎞
⎞
⎝
a
1
⎠
ca
(1 −
m)
+
ηA
2
⎜
⎜
⎟
⎟
a
⎛
⎛
r - d
⎞
⎞
⎝
⎝
1
⎠
1
ное значение -
⎠ -
d
ca
(1
−
m
)
+
ηA
2
2
⎜
⎜
⎟
⎟
⎛r - d
1
⎞
⎝
⎝
a
1
⎠
1+αηA+b(1−
m
)
⎠ >
d
⎜
⎟
2
⎝
a
1
⎠
⎛
r - d
1
⎞
1+
αηA+b(1−
m
)
⎜
⎟
⎝
a
1
⎠
Теорема 6.2. Свободное равновесие хищников
E1 локально асимптотически устойчиво, если
(Замечание: существование E1 дестабилизирует E0.)
Матрица Якоби J2 при
E
2
(0, y
)
имеет вид:
⎡
r
a
2
(1
−
m)
y
⎤
−
d
−
0
⎢
1
⎥
1
+
ky
1+α
ηA +ey
J
= ⎢
⎥
2
yca
(1
-
m)
ca
ηAb(
1−
m)y
−
ca
η
Aey
⎢
2
2
2
⎥
−
⎢
2
2
⎥
1+
αη
A
+
ey
(1
+
αηA
+
ey)
(1
+
αη
A
+
ey
)
⎣
⎦
Можно видеть, что одно собственное значение -
Теорема 6.3. Точка свободного равновесия
жертв Е2 локально асимптотически устойчива,
r
a
2
(1 -
m)
y
это
−
d
−
,
а другое
-
r
a
(
1
−
m)
y
1
2
если
<
d
+
,
и неустойчива при
1+
ky
1
+
αηA +ey
1
1
+
ky
1
+ αη
A
+
ey
r
a
2
(
1
-
m)y
−ca
ηAey
>
d
+
2
1
(и оно меньше нуля).
1
+
ky
1
+ αη
A +ey
(1
+
αηA +ey)2
Оценим матрицу Якоби J* при E*(x*,y*):
⎡
a
11
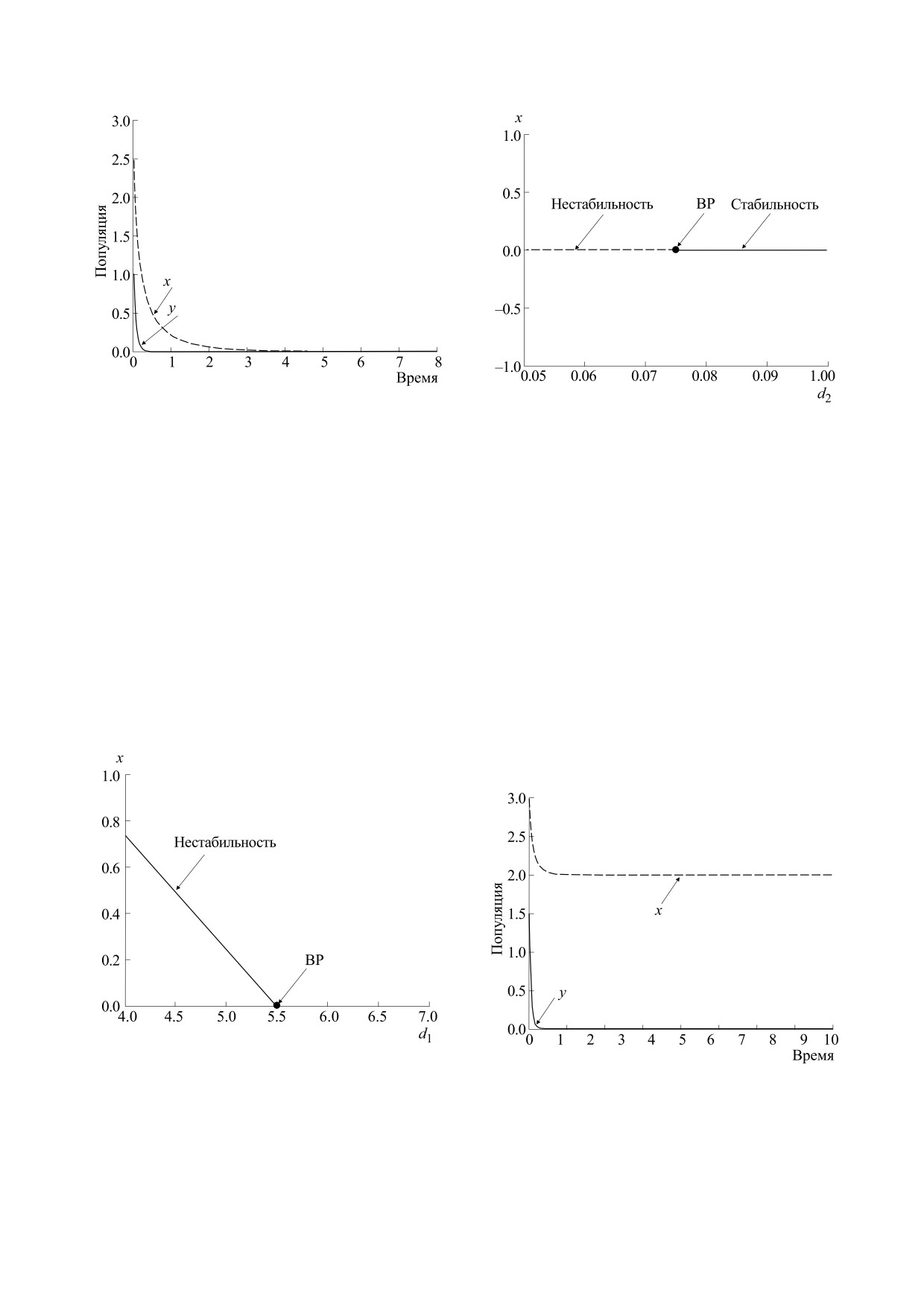
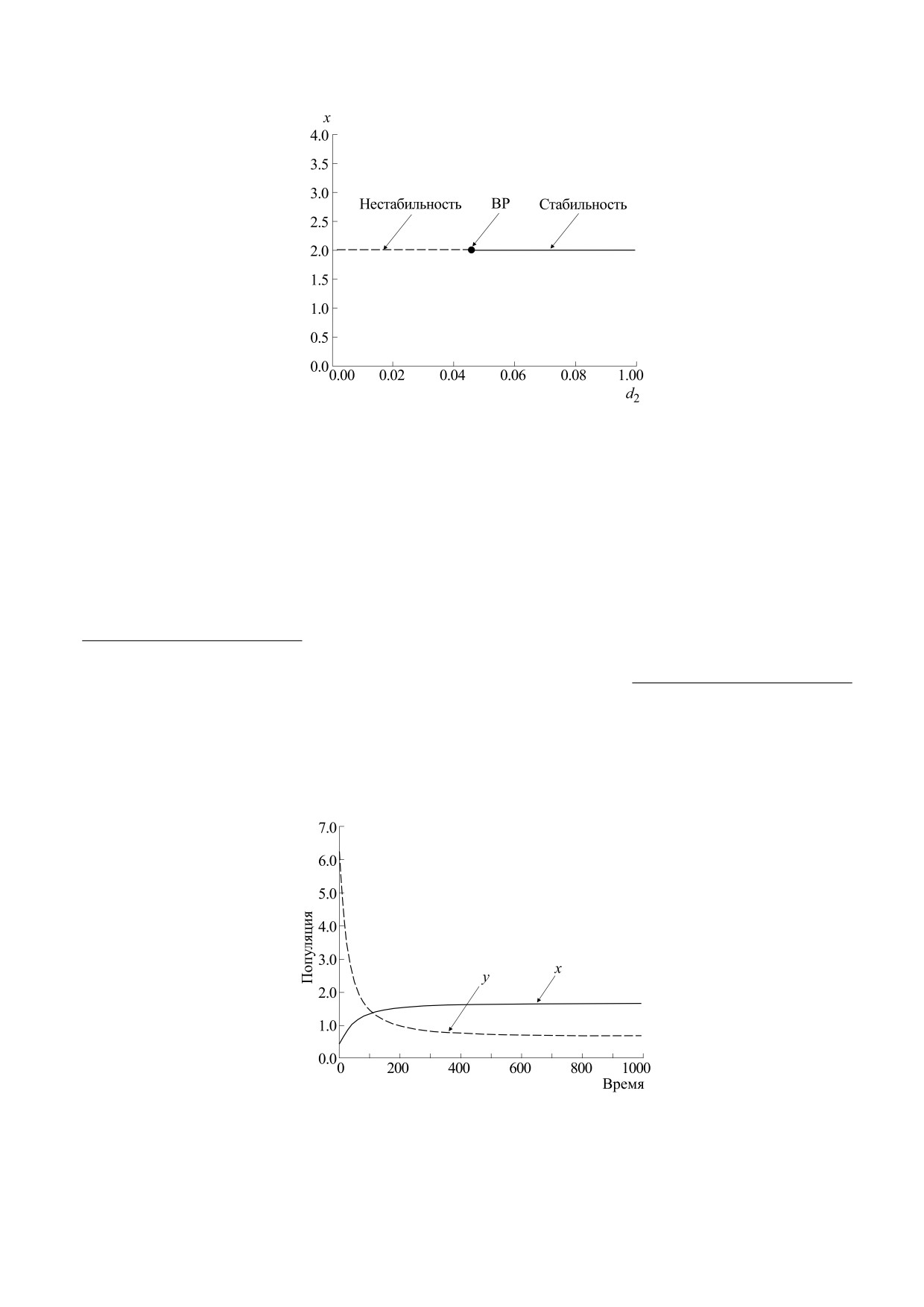
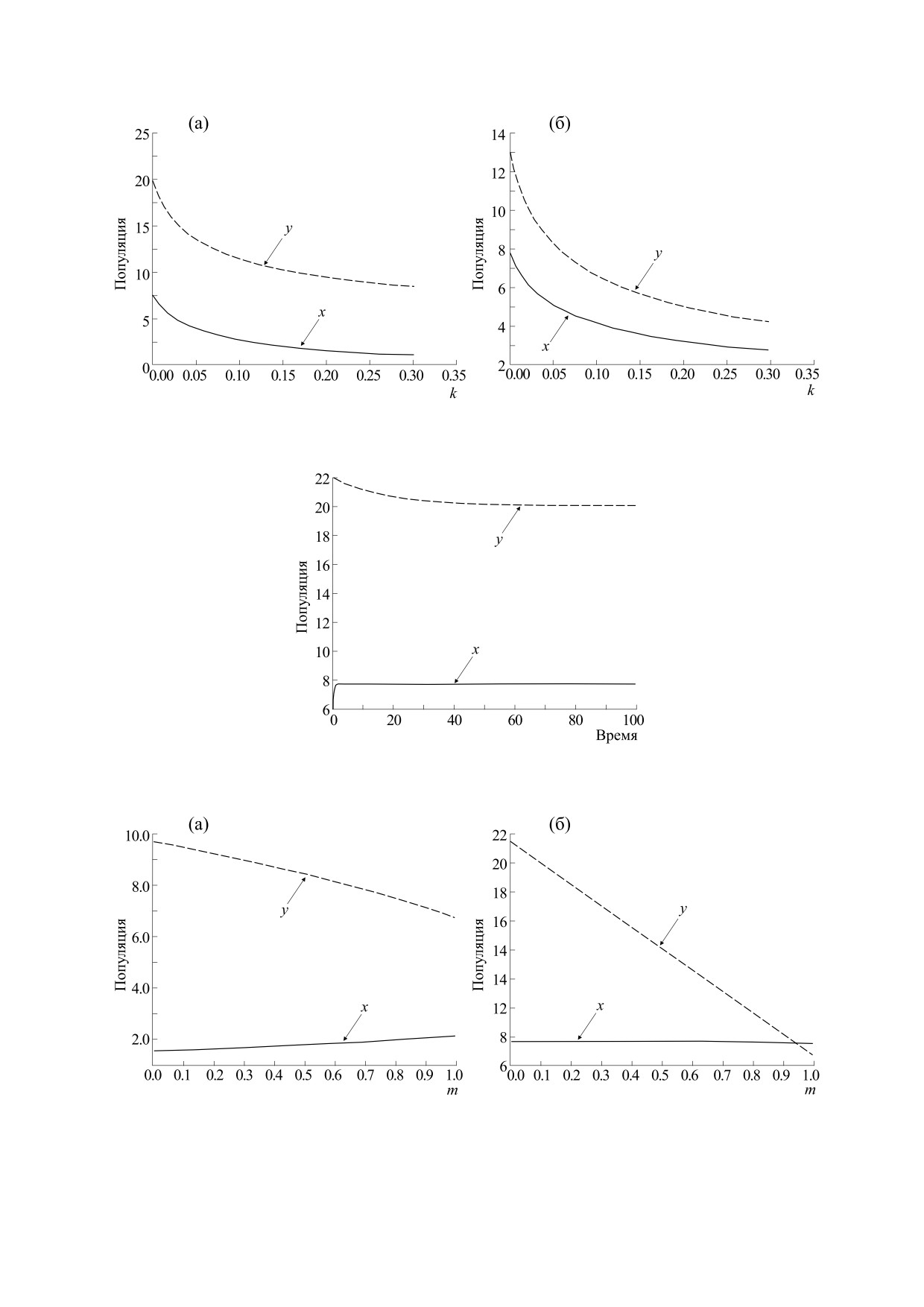
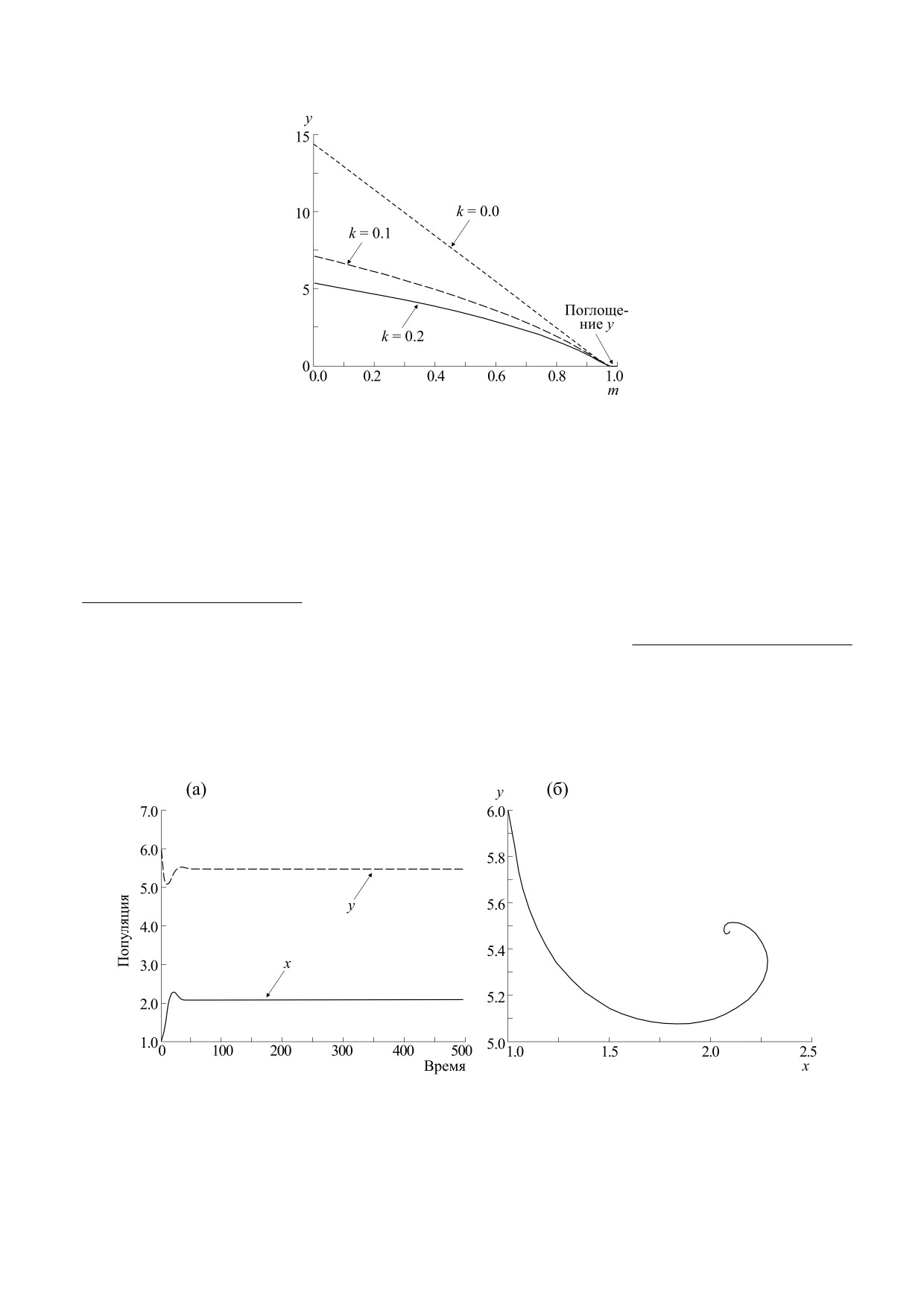
a
12
⎤
J
*
,
=⎢
⎥
a
a
⎣
21
22
⎦
БИОФИЗИКА том 66
№ 3
2021
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
523
где
⎧
2
*
⎫
*
⎪
a
2
b(1−
m)
y
⎪
a
11
=
x
⎨−a
1
+
⎬,
2
*
*
⎪
(
1+
αηA+b(1−
m)x
+
ey
)
⎪
⎩
⎭
⎧
*
⎫
*
⎪
−rk
a
2
(1 −
m)
a
2
(1 −
m)ey
⎪
a
=
x
−
+
,
12
⎨
2
*
*
2
⎬
*
*
*
1+
ky
1+
αηA+b(
1−
m)x
+
ey
1+
αηA+b
1
−
m
x
+
ey
⎪
(
)
(
(
)
)
⎪
⎩
⎭
⎧
*
⎫
ca
⎡ηA
+
1−
m
x
⎤b
1
−
m
⎪
ca
(1 −
m)
2
(
)
(
)
⎪
*
2
⎣
⎦
a
=
y
−
,
21
⎨
*
*
2
⎬
*
*
1+
αηA+b(1−
m)x
+
ey
⎪
(
)
(
1+
αηA+b(1
−
m)
x
+
ey
)
⎪
⎩
⎭
*
*
−ca
y
⎡
ηA
+
(1
−
m)x
⎤
e
2
⎣
⎦
a
22
=
*
*
(
1
+
αηA+b(
1
−
m)x
+
ey
)2
Характеристическое уравнение, соответству-
r − d
1
Следовательно,
lim
x t)
≤
(используя
ющее J*, имеет вид:
t→∞
a
1
лемму 2.1). Теперь для больших t имеем
λ2 + A1λ + A2 = 0,
(6.3)
dy
ca
2
{(
1
−
m)
x
+
ηA}y
где A1 = -(a11 + a22) и A2 = a11a22 - a12a21.
=
−
d
2
y,
dt
1
+
αη
A
+
b
(1
−
m)
x + ey
Теорема 6.4. Точка E* локально асимптотиче-
dy
⎧
ca
ηA ca
(
1-
m
)
x
⎫
2
2
ски устойчива, если A1 > 0 и A2 > 0. Далее, точка E*
≤-
⎨d
2
−
−
⎬y,
dt
⎩
1
+
αηA
1+
αη
A
⎭
неустойчива при A1 < 0 (независимо от знака A2)
dy
⎧
ca
ηA ca
(
1
−
m)
⎛
r - d
⎞⎫
или при A2 < 0 (независимо от знака A1).
2
2
1
≤-
d
−
−
y
⎨
2
⎜
⎟⎬
dt
1
+
αη
A
1
+
αη
A ⎝ a
1
⎩
⎠⎭
Анализ глобальной устойчивости. Теорема 6.5.
r - d
1
(поскольку lim
x t)
≤
,
⎛
r - d
⎞
1
t
→∞
(6.5)
Свободное равновесие хищника
E
,0
гло-
a
1
⎜
⎟
1
⎝
a
1
⎠
dy
бально асимптотически устойчиво при следую-
<
0,
щем условии:
dt
при условии
ca
ηA ca
(
1
-
m)⎛
r - d
⎞
ca
η
A ca
(1
-
m
)
⎛
r - d
⎞
2
2
1
2
2
1
d
−
−
>
0.
d
−
−
>
0,
2
⎜
⎟
2
⎜
⎟
1+
αηA
1+
αη
A ⎝ a
1+
αη
A
1
+
αη
A ⎝ a
1
⎠
1
⎠
r - d
1
∴lim
y t)
=
0
⇒
lim
x t)
=
Доказательство:
t→∞
t→∞
a
1
dx
rx
2
a
2
(1
−
m)xy
Примечание: Точка E0(0, 0) глобально асимпто-
=
-
d
1
x - a
1
x
−
,
тически устойчива на основании теорем 5.1, 5.2 и
dt
1+
ky
1
+
αη
A +b(
1−
m
)
x + ey
6.1.
dx
rx
2
≤
-
d
1
x - a
1
x
,
Теорема
6.6. Свободное равновесие жертв
dt
1
+
ky
E2(0, у) глобально асимптотически устойчиво в
2
dx ≤ rx − d
x − a
x
,
следующей области:
1
1
dt
Φ
=
{(
x
,
y
)
:
x
>
0,
⎛
⎞
⎜
⎟
0
<
y
<
y
,
dx
x
=
(r - d
1
)x
⎜1
−
⎟
dt
r - d
1
r
<
d
1
,
ca
2
ηA > d
2
(1
+
αηA)
}.
⎜
⎟
⎜
⎟
⎝
a
1
⎠
БИОФИЗИКА том 66
№ 3
2021
524
МОНДАЛ, САМАНТА
Доказательство. Рассмотрим функцию Ляпу- где V(x, y) является положительно определенной
нова в следующем виде:
функцией для всех (x,y) ∈ Ф.
Теперь производная V по времени, вычислен-
1⎧
⎛ y⎞⎫
ная вдоль решений системы (2.2), определяется
V
(x,y)
=
x
+
⎨y - y − ylog⎜
⎟⎬,
c⎩
⎝y⎠⎭
выражением:
y
V = x
+
1(y - y)
c
y
rx
2
a
2
(1 −
m)xy
1
⎧
ca
2
{(
1−
m)x
+ηA}
⎫
⇒
V
=
-
d
1
x - a
1
x
−
+
(y - y)⎨
−
d
2
⎬
1+
ky
1+ αηA+b(1−
m)
x + ey c
1+ αη
A+b(1−
m)x + ey
⎩
⎭
2
⎧ ηA d
2
⎫
⇒
V≤ (r −d )x
1
+
⎨
−
⎬(y - y)
⎩1+ αηA c
⎭
Таким образом,
V <
0
в области Φ и
V =0
в
1
Доказательство. Пусть
U(x,y) =
- непре-
Е2. Поэтому согласно теореме Ляпунова [22]
xy
рывно дифференцируемая функция
E
(0, y)
глобально асимптотически устойчива в
2
rx
2
a
2
(1 -
m)xy
области Φ.
u
1
=
-
d
1
−
a
1
x
−
,
1+
ky
1+ αη
A+b(1−
m)x +ey
Теорема
6.7. Равновесие сосуществования
ca
{(
1
−
m)x+ηA}y
E*(x*,y*) глобально асимптотически устойчиво в
2
u
=
−
d
y
2
2
следующей области:
1
+ αηA+b(1
−
m)
x + ey
D = {(x,y): x > 0, y > 0, b(1 - m) - ce < 0}.
Ясно, что U(x,y) > 0 внутри положительного
квадранта xy-плоскости.
Теперь
∂
∂
Δ
(x,y
)
=
(
1
uU)+
(u
2
U
),
∂x
∂y
⎧
a
(1− m)
⎫
∂
⎛
r
⎞1
2
Δ(x
,y)
=
-d
−
a
x
−
+
⎨⎜
1
1
⎟
⎬
∂x
1+
ky
y
1+ αη +b(1
−
m)x+ey
⎩⎝
⎠
⎭
⎧
ca
(1−
m)
ca
ηA
d
⎫
∂
2
2
2
+
⎨
+
−
⎬,
∂y⎩
1+ αη +b(1−
m
)x+ey x(1+ αη +b
(1−
m
)x+ey
)
x
⎭
−a
a
(1−
m b(
1
−
m
)
−ce}
ca
η
Ae
1
2
2
Δ
(
x
,y)
=
+
−
2
2
y
(1
+ αηA+b(1-m)
x
+ey)
x(
1
+ αηA+b
(1
-
m
)x
+
ey)
Следовательно, Δ(x,y) < 0 всегда, если b(1 - m) -
ственному значению точки равновесия Ei, где
- ce < 0. По критерию Дюлака [28], предельного
i = 0,1,2.
цикла в области D не существует. Таким образом,
Пусть F = (F1,F2)T, где
E*(x*,y*) в этой области глобально асимптотиче-
ски устойчиво.
Локальные бифуркации. В этом подразделе мы
a
(1 -
m
)xy
2
2
rx
F
=
-
d
x a
x
−
,
вывели локальную бифуркацию размерности 1
1
1
1
1+
ky
1
+
αη
A+b(1−
m)
x + ey
вокруг точек равновесия, и для этого мы исполь-
ca
{(
1
−
m)
x
+
η
A
}y
зовали теорему Сотомайора [28]. Чтобы приме-
2
F
2
=
−
d
2
y
нить теорему Сотомайора, одно из собственных
1
+
αη
A
+
b(1
−
m)
x + ey
значений матрицы Якоби в точке бифуркации
Теорема 6.8. Система (2.2) претерпевает тран-
должно быть равно нулю. Пусть V = (v1,v2)T и
скритическую бифуркацию вокруг точки Е0(0,0),
W = (w1,w2)T - собственные векторы матрицы Ji и
ca
2
η
A
если d1[TC] = r и
−
d
2
<
0.
(Ji)T, соответственно отвечающие нулевому соб-
b1
+ αηA
БИОФИЗИКА том 66
№ 3
2021
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
525
Доказательство. Имеем
Значит, при d1[TC]:
⎡r - d1
0
⎤
⎡0
0
⎤
J
0
=
⎢
ca
ηA
⎥
⎢
⎥
2
J
=
ca
ηA
⎢
0
−
d
⎥
0
2
2
0
−
d
⎢
2
⎥
⎣
1+
αηA
⎦
⎣
1+
αηA
⎦
Пусть d1[TC] - критическое значение d1, такое,
После некоторых вычислений: V = (v1,0)T и
что J0 имеет одно нулевое собственное значение.
W = (1,0)T, где v1 ≠ 0.
(Здесь d1[TC] = r.)
Следовательно
T
[TC]
⎛−x⎞
Δ
=W
F
0,0;d
=
(1,0)
=
0,
1
d
1
(
1
)
⎜
⎟
0
⎝
⎠
E0
T
[TC]
⎡−10⎤
⎛v
1
⎞
Δ
=W
⎡DF
0,0;d
V⎤
=
(1,0)
=-v
≠
0,
2
d
1
(
1
)
⎢
⎥
⎜
⎟
1
⎣
⎦
0
0
0
⎣
⎦
E0
⎝
⎠
⎛∂F
1
∂F
1
⎞
v
1
+
v
2
⎜
⎟
T
2
[TC]
∂x
∂y
⎛
v
1
⎞
Δ
=W
⎡D
F
0,0;d
V,V)⎤
=
(1,0)
D⎜
⎟
=
3
(
1
)(
⎜
⎟
⎣
⎦
∂F
∂F
0
⎜
2
2
⎟
⎝
⎠
v
+
v
⎜
1
2
⎟
⎝
∂x
∂y
⎠
E
0
2
2
2
⎛
∂
F
2
∂
F
2
∂
F
⎞
1
1
1
⎜
v
1
+
v
2
+
2
v
1
v
2
⎟
2
2
∂x
∂y
∂ ∂
2
=
(1,0
)
⎜
⎟
=
-
2
a
v
≠
0.
2
2
2
1 1
⎜
∂
F
∂
F
∂
F
⎟
2
2
2
2
2
v
+
v
+
2
v
v
⎜
2
1
2
2
1
2
⎟
⎝
∂
x
∂
y
∂x∂y
⎠
E
0
По теореме Сотомайора система (2.2) претерпева-
Пусть d2[TC] будет критическим значением d2
ет транскритическую бифуркацию при d1 = d1[TC] = r
таким, что J1 имеет одно нулевое собственное
ca
η
A
2
⎛
[
TC
]
ca
ηA
⎞
вокруг Е0 при условии
-
d
<
0.
2
2
значение.
Здесь
d
=
⎜
2
⎟
b
+
αηA
1
⎝
1+
αηA
⎠
Теорема 6.9. Транскритическая бифуркация
возникает в системе (2.2) вокруг точки Е0, если
Таким образом, при d2[TC]:
[
TC
]
ca
2
ηA
d
=
и r < d1.
⎡
r - d
0⎤
2
1
1+ αη
A
J
0
= ⎢
⎥
0
0
Доказательство. Имеем
⎣
⎦
r - d
0
После некоторых вычислений имеем:
⎡
1
⎤
⎢
⎥
V = (0,v2)T и W = (0,1)T, где v2 ≠ 0.
J
=
ca
ηA
2
0
⎢
0
−
d
2
⎥
b
+
αηA
Следовательно,
⎣
1
⎦
T
[TC
]
⎛
0
⎞
Δ
=
W
F
0,0;
d
=
(0,1
)
=
0,
1
d
2
(
2
)
⎜
⎟
⎝−
y
⎠
E0
T
[TC]
⎡
0
0
⎤
⎛
0
⎞
Δ
=
W
⎡DF
0,0;d
V⎤
=
(0,1)
=-
v
≠
0,
2
d
2
(
2
)
⎢
⎥
⎜
⎟
2
⎣
⎦
0
−1
v
⎣
⎦
⎝
2
⎠
0
E
⎛
∂
F
1
∂F
1
⎞
v
1
+
v
2
⎜
⎟
0
T
2
[TC]
∂
x
∂
y
⎛
⎞
Δ
=W
⎡D
F
0,0;d
V,
V
⎤
=
0,1
D
=
3
(
2
)(
)
(
)
⎜
⎟
⎜
⎟
⎣
⎦
⎜
∂
F
2
∂
F
2
⎟
⎝
v
2
⎠
v
+
v
⎜
1
2
⎟
⎝
∂
x
∂
y
⎠
E
0
2
2
2
⎛∂
F
2
∂
F
2
∂
F
⎞
1
1
1
v
+
v
+
2
v
v
⎜
2
1
2
2
1
2
⎟
∂
x
∂y
∂ ∂
−
2
ca
e
η
A
2
⎜
⎟
2
=
(0,1
)
=
v
2
≠
0.
2
2
2
2
⎜∂
F
2
∂
F
2
∂
F
⎟
(
1
+
αη
A
)
2
2
2
⎜
v
1
+
v
2
+
v
1
v
2
⎟
2
2
⎝
∂
x
∂
y
2∂x∂y
⎠
E
0
БИОФИЗИКА том 66
№ 3
2021
526
МОНДАЛ, САМАНТА
По теореме Сотомайора транскритическая
Пусть d2[TC] будет критическим значением d2 та-
бифуркация возникает в системе
(2.2) при
ким, что J1 имеет одно нулевое собственное нначе-
[
TC
]
ca
ηA
2
d
=
d
=
вокруг Е0 при условии r < d1.
2
2
⎛
⎛r - d
1
⎞
⎞
1+ αηA
ca
(1 −
m)
+
ηA
2
⎜
⎜
⎟
⎟
Теорема
6.10. Транскритическая бифуркация
[
TC
]
⎝
⎝
a
1
⎠
⎠
ние. Здесь
d
2
=
⎛r - d
⎞
⎛r - d
⎞
1
1
возникает в системе (2.2) вокруг точки
E
,0
,
1+
αηA+b(1−
m
)
1
⎜
⎟
⎜
⎟
⎝
a
1
⎠
⎝
a
1
⎠
Таким образом, при d2[TC]:
⎛
⎛r - d
1
⎞
⎞
ca
(1 −
m)
+
ηA
2
⎜
⎜
⎟
⎟
[
TC
]
a
⎡
⎧
⎫⎤
⎝
⎝
1
⎠
⎠
если
d
=
и r > d1.
2
⎢
⎪
⎪⎥
⎛r - d
⎞
r - d
a
2
(
1
-
m
)
1
1
1+
αηA+b(1−
m
)
⎢-r + d
1
⎨−rk
−
⎬⎥
⎜
⎟
J
=
a
⎛
r - d
⎞
⎝
a
1
⎠
1
⎢
1
⎪
1
⎪⎥
1
+ αηA + b
(
1
−
m
)
⎜
⎟
⎢
⎩
a
Доказательство. Имеем
⎝
1
⎠⎭
⎢
⎥
⎣
0
0
⎦
⎡
⎧
⎫⎤
После некоторых вычислений имеем: V = (v1,v2)T
⎢
⎪
⎪⎥
r - d
a
(1
-
m
)
1
2
-r + d
−rk
−
−x
⎢
1
⎨
⎬⎥
12
и W = (0,1)T, где
v
=
v
,v
=
1,
x
=-r + d
и
a
⎛r - d
⎞
1
2
2
11
1
⎢
1
⎪
1
⎪⎥
1
+
αη
A + b
(
1
−
m
)
x
⎜
⎟
11
⎢
⎩
a
1
⎝
⎠⎭
J
=
⎧
⎫
1
⎢
⎥
⎛
⎛r - d
1
⎞
⎞
⎪
⎪
⎢
ca
(1
-
m
)
+
η
A
⎥
r - d
⎪
a
2
(1 −
m
)
⎪
2
⎜
⎜
⎟
⎟
1
x
12
=
⎨−rk
−
⎬
⎢
⎝
⎝
a
1
⎠
⎠
⎥
a
⎛r - d
⎞
0
−
d
2
1
⎪
1
⎪
⎢
⎥
1+ αηA+b(1−
m
)
⎛
r - d
1
⎞
⎜
⎟
1
+
αηA + b
(
1
−
m
)
⎩
⎝
a
⎠⎭
⎢
⎜
⎟
⎥
1
⎣
⎝
a
1
⎠
⎦
Следовательно,
T
[
TC
]
⎛
0
⎞
Δ
=
W
F
0,0;d
=
(0,1)
=
0,
1
d
2
(
2
)
⎜
⎟
−
y
⎝
⎠
E1
T
[
TC
]
⎡0
0
⎤
⎛
v
1
⎞
Δ
=
W
⎡
DF
E
;d
V
⎤
=
(
0,1)
=-
1
≠
0,
2
d
2
(
1
2
)
⎢
⎥
⎜
⎟
⎣
⎦
0
−1
1
⎣
⎦
E1
⎝
⎠
⎛∂F
1
∂F
1
⎞
v
1
+
v
2
⎜
⎟
T
2
[
TC
]
∂
x
∂y
⎛
v
1
⎞
Δ
=
W
⎡
D
F
E
;
d
V
,V
)
⎤
=
(
0,1)
D⎜
⎟
=
3
(
1
2
)(
⎜
⎟
⎣
⎦
∂F
∂F
v
⎜
2
2
⎟
⎝
2
⎠
v
+
v
⎜
1
2
⎟
⎝
∂
x
∂y
⎠
E
1
2
2
2
⎛
∂
F
2
∂
F
2
∂
F
⎞
1
1
1
v
+
v
+
2
v
v
⎜
2
1
2
2
1
2
⎟
∂
x
∂
y
∂ ∂y
=
(0,1
)
⎜
⎟
=
2
2
2
⎜
∂
F
∂
F
∂
F
⎟
2
2
2
2
2
v
+
v
+
2
v
v
⎜
2
1
2
2
1
2
⎟
⎝
∂
x
∂
y
∂ ∂y
⎠
E
1
⎧
⎫
⎡
⎛
r - d
1
⎞
⎤
⎪
−ca
e
(1
−
m)
+η
A
⎪
2
⎢
⎜
⎟
⎥
⎪
a
ca
(1
−
m)(
1
+ αη
A-bηA)
v
⎪
1
2
1
⎣
⎝
⎠
⎦
=
2
⎨
+
⎬
≠
0.
2
2
⎪⎧
⎛
r - d
1
⎞⎫
⎧
⎛r - d
1
⎞⎫
⎪
1
+ αη
A+b
(
1
−
m
)
1+ αηA+b
(
1
−
m)
⎨
⎜
⎟⎬
⎨
⎜
⎟⎬
⎪
⎪
⎩⎩
⎝
a
1
⎠⎭
⎩
⎝
a
1
⎠⎭ ⎭
По теореме Сотомайора транскритическая би-
Теорема 6.11. Транскритическая бифуркация
фуркация возникает в системе
(2.2) при
возникает в системе (2.2) вокруг точки
E
(
0, y
)
,
2
⎛
⎛
r - d
1
⎞
⎞
ca
(1 −
m)
+η
A
2
⎜
⎜
⎟
⎟
⎧
⎫
[
TC
]
⎝
⎝
a
1
⎠
⎠
d
2
=
d
2
=
вокруг точ-
⎪
⎪
если
[
TC
]
1
r
⎛
r - d
⎞
k
=
-
1⎬.
1
⎨
1+ αη
A+b
(
1
−
m
)
⎜
⎟
y
a
2
(1 −
m)
y
a
⎪d
+
⎪
⎝
1
⎠
1
ки E1 при условии r > d1.
⎩
1
+
αη
A +ey
⎭
БИОФИЗИКА том 66
№ 3
2021
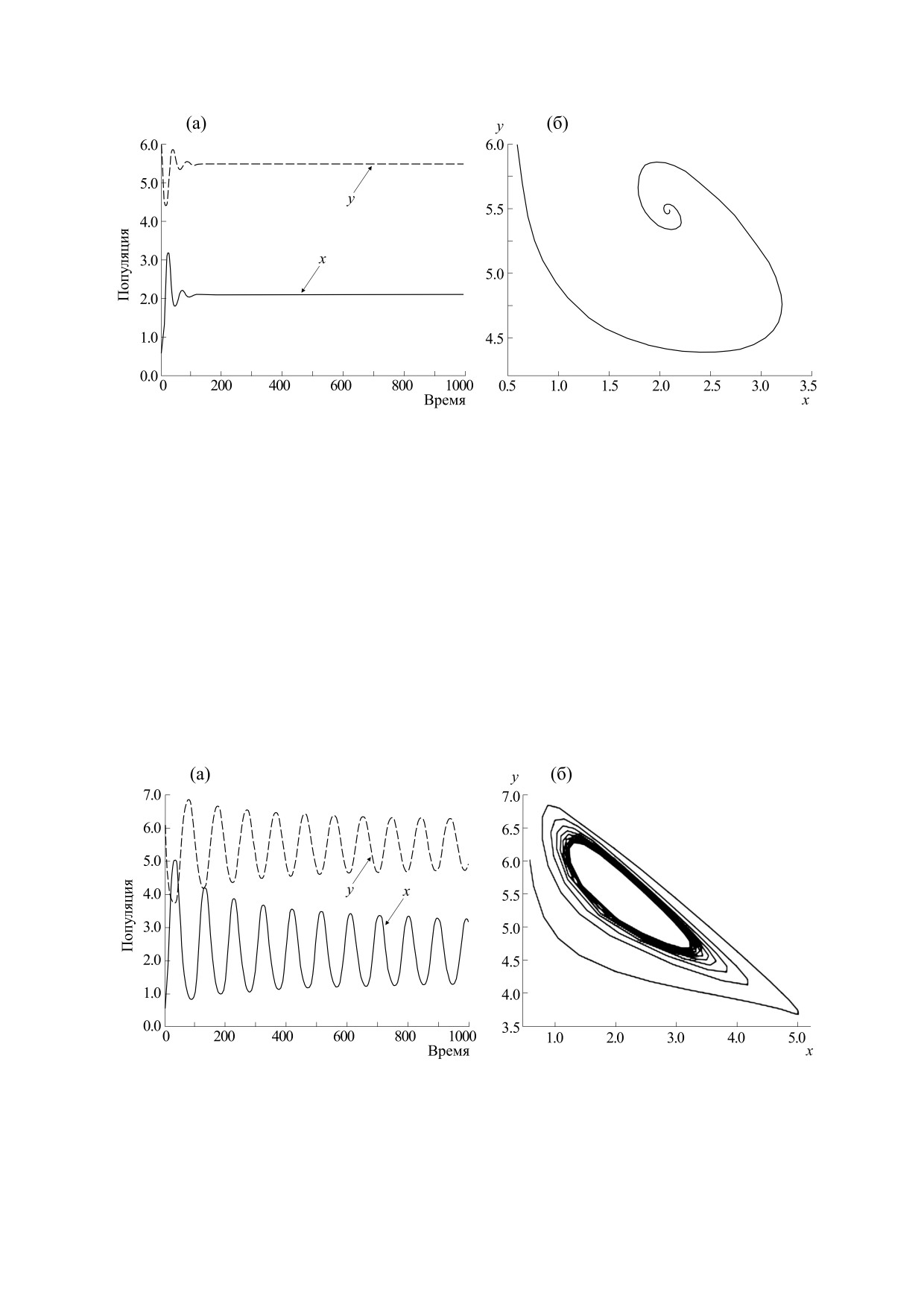
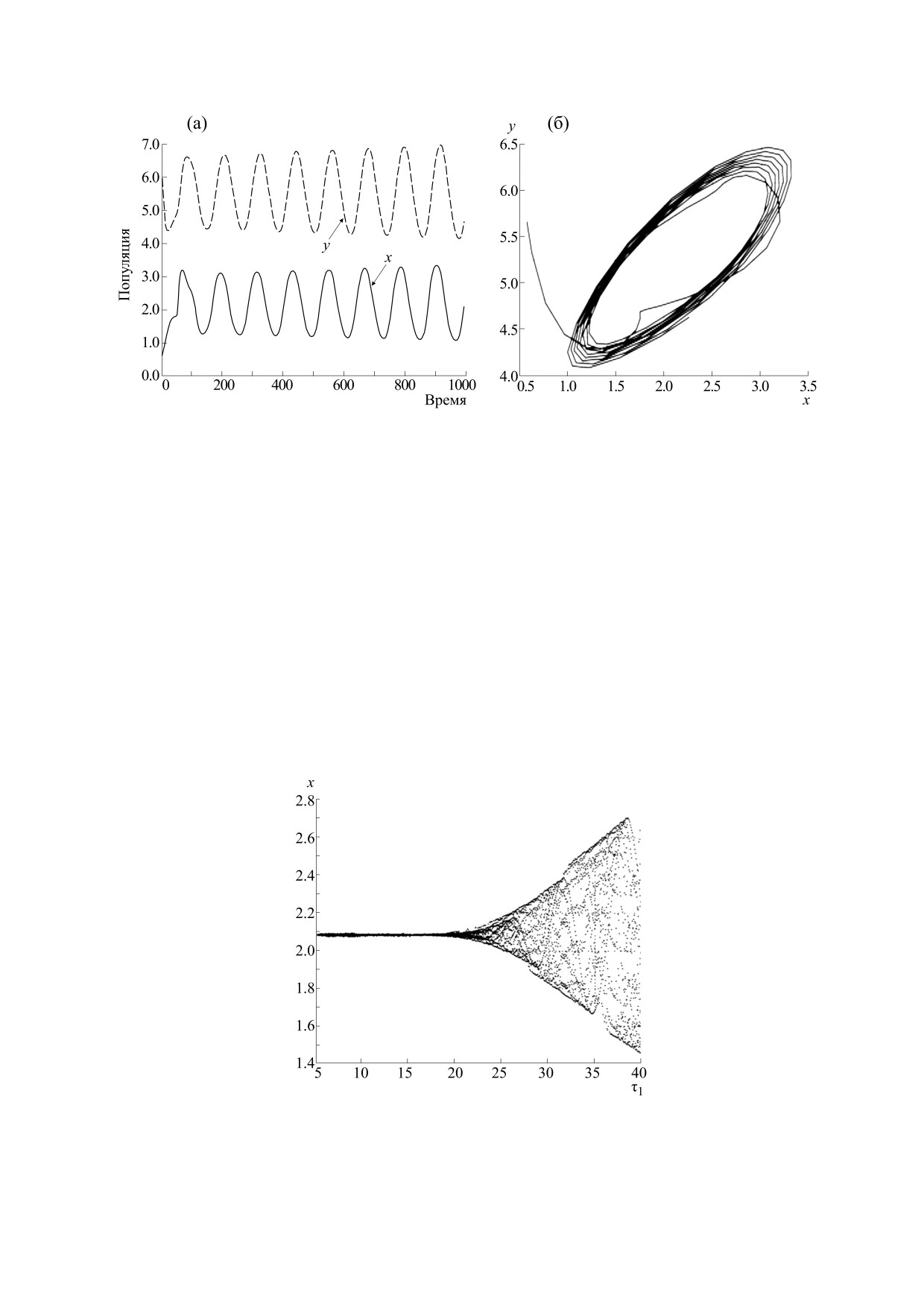
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
527
Доказательство. Имеем
Таким образом, при k[TC]:
⎡
0
0
⎤
⎡
r
a
2
(
1
−
m
)
y
⎤
−
d
−
0
⎢
⎥
1
J
=
yca
(
1
−
m
)
ca
ηAb
(
1
−
m
)
y
−ca
ηAey
⎢
⎥
2
2
2
2
1
+
ky
1
+ αηA + ey
⎢
−
⎥
2
2
J
2
=
⎢
⎥
⎣1
+
αη
A + ey
(
1
+
αηA + ey
)
(
1
+
αηA + ey
)
⎦
yca
(
1
-
m
)
ca
η
Ab
(
1
−
m
)
y
−ca
ηAey
⎢
2
2
2
⎥
−
После некоторых вычислений имеем:
2
2
1
+ αη
A + ey
1
+ αη
A + ey
1
+ αηA + ey
⎢
(
)
(
)
⎥
−y
21
V = (v1,v2)T и W = (1,0)T, где
v
=
v
, v1 = 1 (до-
2
1
Пусть k[TC] будет критическим значением k та-
y
22
yca
(1 −
m
)
ca
η
Ab(1
−
m)y
ким, что J2 имеет одно нулевое собственное зна-
2
2
пустим),
y
=
−
и
21
2
1+ αη
A +ey
(1
+ αηA +ey)
⎧
⎫
⎪
⎪
-ca
η
Aey
[
TC
]
1
r
2
чение. Здесь
k
=
-1⎬.
y
22
=
⎨
2
y
a
2
(
1
−
m)y
(1 + αηA +ey)
⎪
d
+
⎪
1
⎩
1+
αηA +ey
⎭
Следовательно,
⎛
−rkx
⎞
T
[
TC
]
2
⎜
⎟
Δ
=
W
F
E
;k
=
(1,0)
(1 +
ky
)
=
0,
1
k
(
2
)
⎜
⎟
⎜
⎟
0
⎝
⎠
E
2
2
⎡
-rk
2rk
x
⎤
[
TC
]
T
[
TC
]
⎢
2
3
⎥
⎛v
1
⎞
-
rk
Δ
=
W
⎡
DF
E
;
k
V
⎤
=
1,0
=
≠
0,
2
k
(
2
)
(
)
(1 +
ky
)
(1 +
ky)
⎜
⎟
⎣
⎦
⎢
⎥
[
TC
]
2
⎝v
2
⎠
1+
k
y
⎣
0
0
⎦
(
)
E2
⎛
∂
F
1
∂
F
1
⎞
v
1
+
v
2
⎜
⎟
T
2
[
TC
]
∂
x
∂
y
⎛
v
1
⎞
Δ
=
W
⎡
D
F
E
;k
V,V
)⎤
=
(1,0)
D
⎜
⎟
=
3
(
2
)(
⎜
⎟
⎣
⎦
∂
F
∂
F
v
⎜
2
2
⎟
⎝
2
⎠
v
+
v
⎜
1
2
⎟
⎝
∂
x
∂
y
⎠
E
2
2
2
2
⎛∂
F
∂
F
∂
F
⎞
1
2
1
2
1
v
+
v
+
2
v
v
⎜
2
1
2
2
1
2
⎟
∂
x
∂y
∂ ∂y
=
(1,0
)
⎜
⎟
=
2
2
2
⎜∂
F
∂
F
∂
F
⎟
2
2
2
2
2
v
+
v
+
2
v
v
⎜
2
1
2
2
1
2
⎟
∂
x
∂
y
∂ ∂y
⎝
⎠
E2
2
⎧
⎫
⎪
⎪
[
TC
]
a
2
b
(
1
−
m
)
y
⎪
rk
a
2
(
1
−
m
)(1
+
αηA
)
⎪
=
2
⎨−a
1
+
⎬
−
2⎨
+
⎬
v
2
=
2
2
2
[
TC
]
⎩
(1
+
αη
A +ey
)
⎭
⎪
1+
k
y
(1
+
αη
A +ey
)
⎪
(
)
⎩
⎭
[
TC
]
2
rk
v
(
1+
αη
A-b
η
A
)
a
(
1−
m
)
2
2
=
−
2
a
1
−
2
−
2
≠
0.
2
[
TC
]
eη
A(
1+
αηA
+
ey
)
(
1
+
k
y
)
По теореме Сотомайора транскритическая би-
риска нападения хищников после улавливания
фуркация возникает в системе
(2.2) при
химических сигналов или голосовых сигналов.
Таким образом, страх перед риском нападения
⎧
⎫
хищников не влияет спонтанно на рождаемость
⎪
⎪
[
TC
]
1
r
k = k
=
-
1
вокруг точки E2.
популяции жертв, скорее, должна быть некоторая
⎨
⎬
y
a
2
(1
−
m
)
y
временная задержка, называемая дискретной
⎪d
+
⎪
1
⎩
1
+
αηA +ey
⎭
временной задержкой (τ1).
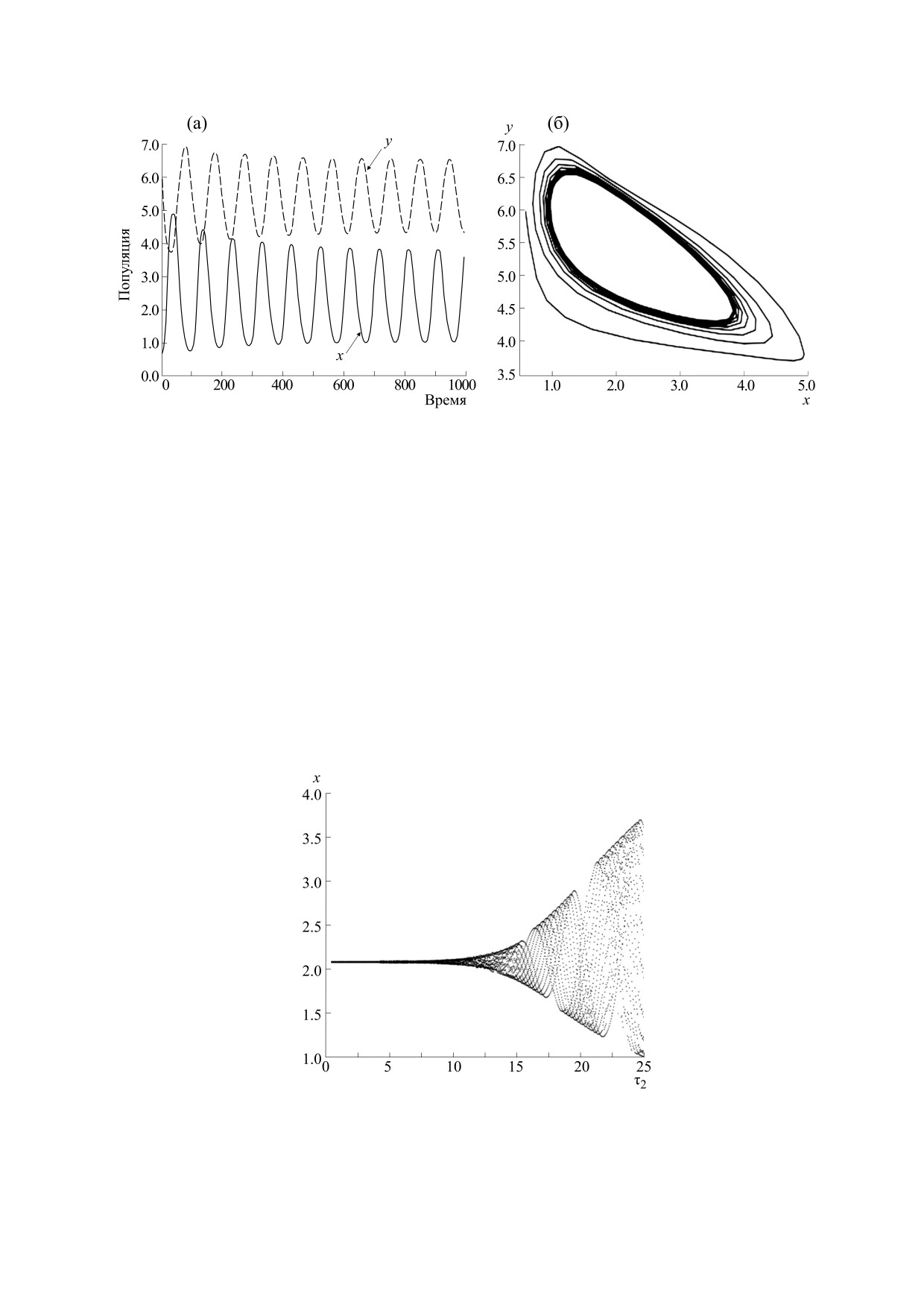
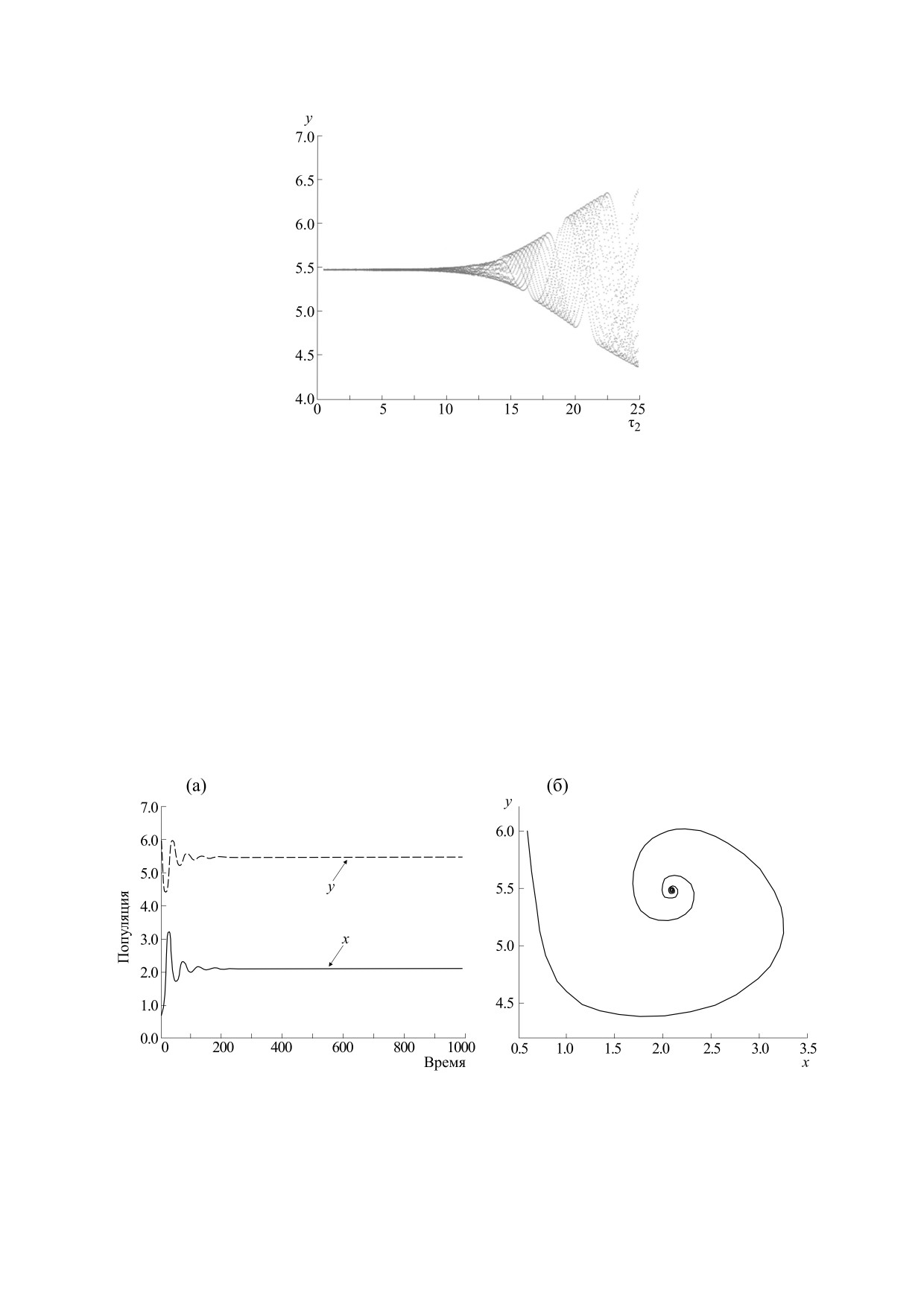
2. Мы учли, что после нападения хищнику требу-
ется некоторое время, чтобы ассимилировать неко-
7. ВЛИЯНИЕ ДИСКРЕТНЫХ ВРЕМЕННЫХ
торое количество энергии из его пищи до уровня
ЗАДЕРЖЕК
энергии хищника. Это не методы спонтанного пре-
1. Более реалистично предположить, что добы-
образования, потому что для завершения этого ме-
че требуется некоторое время для распознавания ханизма необходимо выполнить множество биоло-
БИОФИЗИКА том 66
№ 3
2021
528
МОНДАЛ, САМАНТА
гических процессов. Весь процесс трансформации
Итак, систему «хищник-жертва» (2.2) можно
занимает некоторое время, известное как задержка
доработать следующим образом:
беременности (τ2) [18, 29, 30, 31].
dx
rx
2
a
2
(1 -
m)xy
=
-
d
1
x - a
1
x
−
,
dt
1+
ky(t
−
τ
1
)
1+
αηA+b(1−
m)x + ey
(7.1)
dy
ca
2
{(
1
−
m)
x(t
−τ
2
)
+ ηA}y(t
−τ
2
)
=
−
d
2
y
dt
1+
αη
A+b
(
1
−
m)x(t
−
τ
)
+
ey
(t
−τ
)
2
2
Начальные условия: ψ(ϕ) > 0 (i = 1,2), ∀φ ϵ [-τ,0],
Линеаризуем (7.1) вокруг точки E*(x*,у*) с по-
τ = max{τ1,τ2}, x(φ) = ψ1(φ), y(φ) = ψ2(φ).
мощью преобразований X = x - x* и Y = y - y*:
Для биологической обоснованности ψ1(0) > 0 и
dU = P
U t)
+
P
U
(t
−τ
)
+
P
U
(t
−τ
),
(7.2)
ψ2(0) > 0.
1
2
1
3
2
dt
где
⎡
′ ⎤
⎡
′′ ⎤
⎡
0
0
⎤
T
a
11
a
12
0
a
12
U
=
[
X,Y
]
,P
=
,
P
=
и
P
=
,
1
⎢
⎥
2
⎢
⎥
3
⎢
⎥
0
−
d
0
0
a
a
+
a′
⎣
2
⎦
⎣
⎦
⎣
21
22
22
⎦
⎧
2
*
⎫
*
⎪
a
b(
1−
m)
y
⎪
*
2
rkx
-
a
=
x
−a
+
,a′′ =
,
11
⎨
1
2
⎬
12
2
*
*
*
⎪
(
1
+
αη
A+b
(1
−
m)x
+
ey
)
⎪
(1
+
ky
)
⎩
⎭
⎧
*
⎫
⎪
-
a
(1
−
m
)
a
(1 −
m
)
ey
⎪
*
2
2
a′ =
x
⎨
+
⎬,
12
*
*
2
*
*
1+
αη
A
+
b
(1
-
m
)
x
+
ey
⎪
(
1
+
αη
A
+
b
(1
-
m
)
x
+
ey
)
⎪
⎩
⎭
⎧
*
⎫
ca
⎡η
A
+
(
1
−
m)
x
⎤
b(1
−
m
)
*
⎪
ca
2
(1
−
m
)
2
⎣
⎦
⎪
a
21
=
y
⎨
−
⎬,
*
*
2
1+
αη
A+b
(1
−
m
)
x
+
ey
*
*
⎪
(
1
+
αη
A+b
(1
−
m
)
x
+
ey
)
⎪
⎩
⎭
*
*
*
-ca
y
⎡η
A
+
(1
−
m
)
x
⎤e
ca
⎡η
A
+
(
1
−
m
)
x
⎤
2
⎣
⎦
2
⎣
⎦
a
22
=
,a′
22
=
2
*
*
*
*
1+
αη
A+b(1
−
m
)
x
+
ey
(
1
+ αη
A+b
(
1
−
m
)
x
+
ey
)
Характеристическое уравнение, соответствующее системе (7.1), можно представить в виде:
2
−λτ
2
−λ(
τ
1
+τ
2
)
λ
+
X
1
λ + X
2
+
e
(
X
3
λ + X
4
)
+
e
X
5
=
0,
'
'
'
''
где
X
1
= -a
11
+d
2
,X
2
= -a
11
d
2
,X
3
= -a
22
−a
22
,X
4
=a
11
a
22
+a
11
a
22
−a
12
a
21
, X
5
= -a
12
a
21
Случай 1: τ1 = τ2 = 0.
2
−λτ
2
λ
+
X
λ + X
+
e
(
X
λ + X
)
=
0,
(7.4)
1
2
3
6
В этой ситуации система (7.1) сводится к систе-
ме (2.2), а условия локальной устойчивости точки
E* уже обсуждались в разделе «Точки равновесия
где X6 = X4 + X5.
и анализ их устойчивости».
Пусть λ = p + iq будет решением уравнения (7.4),
Случай 2: τ1 = 0, τ2 > 0.
поэтому, вставив его в уравнение (7.4), получим:
Если принять τ1 = 0, уравнение (7.3) приобре-
тает вид
2
−
(
p+iq)τ
2
(p + iq
)
+
X
(
P +iq
)
+
x
+
e
(
X
(
p + iq
)
+
X
)
=
0.
(7.5)
1
2
3
6
Сравнивая действительную и мнимую части с обеих сторон уравнения (7.5), имеем:
БИОФИЗИКА том 66
№ 3
2021
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
529
2
2
−pτ
2
−pτ
2
p
−
q
+
X
1
p + X
2
+
e
(X
3
p + X
6
)cos(qτ
2
)
+
e
X
3
qsin(qτ
2
)
=
0
(7.6)
−pτ
2
−pτ
2
2pq + X
1
q + e
X
3
q
cos(qτ
2
)
−
e
(X
3
p + X
6
)sin
(qτ
2
)
=
0.
(7.7)
Необходимым условием изменения устойчи-
Подставляя q2 = β в уравнение (7.10), получим
вости точки E* является то, что уравнение (7.4)
квадратное уравнение относительно β:
должно иметь чисто мнимые корни. По этой при-
чине, заменив p = 0 в уравнениях (7.6) и (7.7), имеем:
R(β) ≡ β2 + R1β + R2 = 0,
(7.11)
-q2 + X2 + X6cos(qτ2) + X3qsin(qτ2) = 0.
(7.8)
2
2
2
2
где
R
1
=-2
X
2
+X
1
−X
3
и
R
2
= X
2
−X
6
X1q + X3qcos(qτ2) - X6sin(qτ2) = 0.
(7.9)
Было замечено, что R(∞) = ∞. Поэтому уравне-
ние
(7.11) имеет положительный корень при
Исключая τ2 возведением в квадрат и добавле-
2
2
R(0) < 0, т.е. при
X
2
< X
6
Пусть β1 будет положи-
нием уравнений (7.8) и (7.9), получим:
тельным корнем уравнения (7.11), тогда
q = β
1
4
2
2
2
2
2
q
+q
−2X
+X
−X
+
X
−X
= 0.
(7.10)
(
2
1
3
)
(
2
6
)
Лемма 7.1 [31]. Рассмотрим:
−λτ
1
−λτ
2
−λτ
m
n
(0)
n
−
1
(0)
(0)
P ≡ P
(
λ,
e
,e
,….,e
)
=λ
+
p
1
λ
+…+
p
n−1
λ+
p
n
=
1
n−
1
1
1
−λτ
1
(m)
n
−1
(m)
(
m)
−λτ
m
=
⎡p
λ
+…+
p
λ+
p
⎤e
+
⎡
p
λ
+…+
p
λ+
p
⎤e
,
1
n−1
n
1
n−
1
n
⎣
⎦
⎣
⎦
при условии SV > UW, где S, U, V и W определены
где τi ≥ 0 (i = 1, 2,…, m) и
p
(i)(
i
=
0, 1, ...,
m;
j
в доказательстве.
j
= 1,2,…, n)
- константы. Поскольку (τ1,τ2,...,τm)
2
2
Доказательство. Если
X
< X
,
уравнение
изменяются, сумма нулевых порядков P в откры-
2
6
той полуплоскости может измениться только в
(7.11) имеет положительный корень, например,
том, случае, если нуль появляется на мнимой оси
β1. Из уравнений (7.6) и (7.7) получим
как
τ j)
2
или пересекает ее.
функцию β1:
Исследуем возникновение бифуркации Хопфа
вокруг точки E*, взяв 2 в качестве параметра би-
−1
⎛
(
X
−
X
X
)
β
−
X
X
⎞
6
1
3
1
2
6
cos
фуркации.
⎜
2
2
⎟
j
⎝
X
+
X
β
⎠
2πj
6
3
1
τ
2
=
+
,
j
=
0,1,2,3,...
Теорема 7.2. Предположим, что равновесие со-
β
β
1
1
существования E* существует и локально асимп-
тотически устойчиво при А1 > 0 и А2 > 0 для систе-
Следовательно, точка E* локально асимптоти-
чески устойчива, если А1 > 0 и А2 > 0 для τ1 = τ2 = 0.
мы (2.2) (τ1 = τ2 = 0). Также для τ1 = 0 и τ2 > 0, если
В случае τ1 = 0 и τ2
> 0 используем лемму Батлера
2
2
X
< X
, то существует пороговое значение τ2*
2
6
[32]: точка E* остается устойчивой при 0 < τ2 < τ2*,
для которого точка E* системы (7.1) устойчива
*
j
где
τ
=
min τ
при 0 < τ2 < τ2* и неустойчиво при τ2 > τ2*. С дру-
2
2
j≥
0
гой стороны, система (7.1) претерпевает сверх-
Проверим условие
трансверсальности:
критическую бифуркацию Хопфа вокруг точки E*
при τ2 = τ2* определяемую следующим образом:
⎡
d
⎤
Re λ(
τ
2
)}
>
0.
(Reλ эквивалентно реаль-
⎢
⎥
⎣
dτ
2
⎦
τ
=
τ
*
2
2
⎛(X - X X
)
β
−
X X
⎞
−1
6
1
3
1
2
6
ной части λ и Imλ эквивалентно его мнимой части.)
cos
⎜
⎟
2
2
*
⎝
X
6
+
X
3
β
1
⎠
Дифференцируя уравнения (7.6) и (7.7) по от-
τ
=
2
β
ношению к τ2 и задавая p = 0 и τ2 < τ2*, получим:
1
⎡
d
⎤
⎡
d
⎤
S
Re λ(
τ
2
)}
+
U
Im λ(τ
2
)}
=
V
,
(7.12)
⎢
⎥
⎢
⎥
d
τ
*
dτ
*
⎣
2
⎦
τ
2
=τ
2
⎣
2
⎦
τ
2
=τ
2
БИОФИЗИКА том 66
№ 3
2021
530
МОНДАЛ, САМАНТА
⎡
d
⎤
⎡
d
⎤
−U
Re λ(τ
)}
+
S
Im λ(τ
)}
=
W,
(7.13)
⎢
2
⎥
⎢
2
⎥
⎣dτ
2
⎦
τ
=τ
*
⎣dτ
2
⎦
τ
=τ
*
2
2
2
2
где
*
*
*
*
*
S
=
{
X
1
+
X
3
cos
(
β
1
τ
2
)
−
X
6
τ
2
cos
(
β
1
τ
2
)
−
X
3
β
1
τ
2
sin
(
β
1
τ
2
)}
,
*
*
*
*
*
U
=
{
−2 β
1
+
X
3
sin
(
β
1
τ
2
)
−
X
6
τ
2
sin
(
β
1
τ
2
)
+
X
3
β
1
τ
2
cos
(
β
1
τ
2
)}
,
*
*
V
=
{
X
6
β
1
sin
(
β
1
τ
2
)
−
X
3
β
1
cos
(
β
1
τ
2
)}
,
*
*
W
=
{
X
6
β
1
cos
(
β
1
τ
2
)
+
X
3
β
1
sin
(
β
1
τ
2
)}
Решаем уравнения (7.12) и (7.13):
−
1
⎛
β
2
−
X
8
⎞
cos
d
[
Re λ(τ
)}]
⎜
⎟
⎡
2
⎤
⎡
SV -UW
⎤
=
j
⎝
X
5
⎠
2
π
j
⎢
⎥
⎣
2
2
⎦
τ
1
=
+
,
j
=
0,1,2,3…
⎣
dτ
2
⎦
S
+
U
β
2
β
2
⎡d
[
Re λ(
τ
2
)}]
⎤
при условии S'V' > U'W', где β2 - положительный
Теперь имеем
>
0,
если
⎢
⎥
dτ
*
корень уравнения
⎣
2
⎦
τ
2
=τ
2
'2
2
2
2
SV > UW. Таким образом, условие трансверсаль-
R′ β′)
≡β
+
X
− 2X
β′ +
X
−X
=0
(
7
8
)
(
8
5
)
ности соблюдено. Значит, система (7.1) проявляет
*
*
сверхкритическую бифуркацию Хопфа, когда τ2
и
S′ = X
7
−X
5
τ
1
cos
(
β
2
τ
1
)
,
пересекает критическое значение τ2*.
*
*
U′=-2 β
2
−X
5
τ
1
sin
(
β
2
τ
1
)
,
Случай 3: τ1 > 0, τ2 = 0.
*
*
Подставив τ2 = 0 в уравнение (7.3), получим:
V′= X
5
β
2
sin
(
β
2
τ
1
)
,
W′= X
5
β
2
cos
(
β
2
τ
1
)
2
−
λτ
Доказательство. Доказательство теоремы та-
1
λ
+
X
7
λ + X
8
+
e
X
5
=
0,
кое же, как и в случае 2.
где X7 = X1 + X3 и X8 = X2 + X4.
Случай 4: τ1 ∈ (0, τ1*) и τ2 > 0.
Теорема 7.3. Предположим, что точка E* суще-
Теорема 7.4. Предположим, что точка E* суще-
ствует и локально асимптотически устойчива при
ствует и локально асимптотически устойчива при
А1 > 0 и А2 > 0 для системы (2.2) (τ1 = τ2 = 0). Так-
А1 > 0 и А2 > 0 для системы (2.2) (τ1 = τ2 = 0). Также
2
2
для τ1 ∈ (0, τ1*) (фиксировано) и τ2 > 0, если
же для τ1 > 0 и τ2 = 0, если
X
8
< X
5
,
существует
2
пороговое значение τ1*, для которого точка E* си-
X
2
<
(
X
4
+X
5
)2
,
тo существует пороговое значение
стемы (7.1) устойчива при 0 < τ1 < τ1* и неустой-
τ20, для которого точка E* системы (7.1) устойчива,
чива при τ1 > τ1*. С другой стороны, система (7.1)
когда 0 < τ2 < τ20 и неустойчива при τ2 > τ20 при
проявляет сверхкриическую бифуркацию Хопфа
условии KM > LN. Более того, система (7.1) прояв-
*
j
вокруг точки E* при
τ
1
=
τ
1
=
min τ
1
,
определяе-
ляет сверхкритическую бифуркацию Хопфа вокруг
j≥0
мым следующим образом:
точки E* при τ2 = τ20, выраженном, как:
⎛
2
2
2
2
⎞
−
1
Q
1
+
Q
2
+
Q
3
+
Q
4
cos
⎜
⎟
⎜
2
2
2
2
⎟
2
Q
+Q
Q
+
Q
0
(
1
2
)(
3
4
)
⎡
−
1
⎛
Q
⎞
−1
⎛
Q
⎞⎤
⎝
⎠
1
1
3
τ
=
+
tan
−
tan
2
⎢
⎜
⎟
⎜
⎟
⎥
γ
1
γ
1
⎣
⎝
Q
2
⎠
⎝
Q
4
⎠⎦
Доказательство. Считаем, что t1 фиксировано
Теперь, подставив λ в уравнение (7.3) и сравнивая
в (0, τ1*) и τ2 > 0. Пусть λ = p' + iq' - собственное
реальную и мнимую части с обеих сторон, мы
значение характеристического уравнения (7.3).
имеем:
' 2
' 2
−p
′
τ
−p′τ
−p′
(
τ +τ
)
2
2
1
2
p
−
q
+
X
p′+ X
+
(
X
p′+ X
)e
cos
(
q
′τ
)
+
X
q′e
sin(
q
′τ
)
+
X
e
cos
(
q′(
τ
+
τ
))
=
0
(7.14)
1
2
3
4
2
3
2
5
1
2
−
p
′
τ
2
−
p
′τ
2
−
p
′
(
1
τ +τ
2
)
2p′q′+ X
q′-
(
X
p′+ X
)
e
sin
(
q
′
τ
)
+
X
q′e
cos
(
q
′
τ
)
−
X
e
sin
(
q
′
(
τ
+
τ
))
=
0.
(7.15)
1
3
4
2
3
2
5
1
2
БИОФИЗИКА том 66
№ 3
2021
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
531
Необходимым условием для изменения устой-
сто мнимым. Итак, подставив р' = 0 в уравнения
чивости в точке E* является то, что корень харак-
(7.14) и (7.15), получим:
теристического уравнения (7.3) должен быть чи-
' 2
−q
+X
+X
cos(q′τ
)
+X
q′sin(q′τ
)
+X
cos(q′(τ
+τ
))
=
0,
(7.16)
2
4
2
3
2
5
1
2
X
q′ - X
sin(q′τ
)
+X
q′cos(q′τ
)
−X
sin(q′(τ
+
τ
))
=
0.
(7.17)
1
4
2
3
2
5
1
2
Возводя в квадрат и складывая уравнения
γ1 - положительный корень уравнения (7.18). Та-
(7.16) и (7.17), чтобы убрать τ2, мы получим транс-
ким образом, чисто мнимые корни характеристи-
цендентное уравнение:
ческого уравнения (7.3) - это ±iγ1 для τ1 ∈ (0, τ1*).
Следовательно, уравнения (7.16) и (7.17) можно
'4
'2
R
(γ)
≡q
+S
q
+S
q′ + S
= 0,
(7.18)
1
1
2
3
представить в следующем виде:
2
3
где
S
= -2X
+X
−X
,S
= 2X
X
sin(q′τ
),
и
Q
1
-
Q
3
cos
(γ
1
τ
2
)
−
sin(γ
1
τ
2
)
=
0,
1
2
1
2
2
3
5
1
2
2
2
Q
-
Q
sin
(γ
τ
)
−
cos(γ
τ
)
=
0.
S
= X
−X
−X
− 2X
X
cos(q′τ
)
2
3
1
2
1
2
3
2
4
5
4
5
1
2
Легко увидеть, что S(∞) = ∞. Таким образом,
Q
1
=
γ
1
−
X
2,
Q
2
=-
X
1
γ
1
,Q
3
=
X
4
+
X
5
cos(γ
1
τ
1
),
где
уравнение (7.18) имеет один положительный ко-
Q
4
=
X
3
γ
1
−
X
5
sin(
γ
1
τ
1
)
2
рень при S(0) < 0, т.е. при
X
<
(X
+X
)2
Пусть
Имеем:
2
4
5
⎛
2
2
2
2
⎞
−1
Q
1
+
Q
2
+Q
3
+Q
4
cos
⎜
⎟
⎜
2
2
2
2
⎟
2
Q
+Q
Q
+Q
0
(
1
2
)(
3
4
)
⎡
−
1
⎛
Q
⎞
−
1
⎛
Q
⎞⎤
⎝
⎠
1
1
3
τ
=
+
tan
−
tan
2
⎢
⎜
⎟
⎜
⎟⎥
γ
1
γ
1
⎣
⎝
Q
2
⎠
⎝
Q
4
⎠⎦
Вокруг точки E* система
(7.1) локально
при 0 < τ2 < τ20 для фиксированного τ1 ∈
асимптотически устойчива при τ1 = τ2 = 0 и при
∈ (0, τ1*).
соблюдении условий А1 > 0 и А2 > 0. Согласно
Дифференцируя уравнения (7.14) и (7.15) относи-
лемме Батлера точка E* останется устойчивой тельно τ2 и задавая р' = 0, q = γ1 и τ2 = τ 20, получим:
⎡
d
⎤
⎡
d
⎤
K
[Re{λ
(
τ
2
)
}]
+
L
[Im{λ
(
τ
2
)
}]
=
M
,
(7.19)
⎢
⎥
⎢
⎥
d
τ
0
dτ
0
⎣
2
⎦
τ
2
=τ
2
⎣
2
⎦
τ
2
=τ
2
⎡
d
⎤
⎡
d
⎤
−L
[Re{λ
(
τ
2
)
}]
+
K
[Im{λ
(
τ
2
)
}]
=
N
,
(7.20)
⎢
⎥
⎢
⎥
⎣d
τ
⎦
0
⎣dτ
⎦
0
2
τ
2
=τ
2
2
τ
2
=
τ
2
где
0
0
0
0
0
0
0
K
=
X
+
X
cos
γ
τ
−
X
τ
cos
γ
τ
−
X
γ
τ
sin
γ
τ
−
X
τ
+
τ
cos γ
τ
+
τ
,
{
1
3
(
1
2
)
4
2
(
1
2
)
3
1
2
(
1
2
)
5
(
1
2
)
1
1
2
))}
*
τ
1
∈
(
0,τ
1
)
0
0
0
0
0
0
0
L
=
−2γ
+
X
sin
γ
τ
−
X
τ
sin
γ
τ
+
X
γ
τ
cos
γ
τ
−
X
τ
+
τ
sin γ
τ
+
τ
,
{
1
3
(
1
2
)
4
2
(
1
2
)
3
1
2
(
1
2
)
5
(
1
2
)
1
1
2
))}
*
τ
1
∈
(
0,τ
1
)
0
2
0
0
M
=
X
γ
sin γ
τ
+
τ
−
X
γ
cos
(
γ
τ
)
+
X
γ
sin
(
γ
τ
,
{
5
1
1
1
2
))
3
1
1
2
4
1
1
2
)}
*
τ
1
∈
(
0,τ
1
)
0
2
0
0
N
=
X
γ
sin γ
τ
+
τ
−
X
γ
sin
γ
τ
+
X
γ
cos
γ
τ
{
5
1
1
1
2
))
3
1
(
1
2
)
4
1
(
1
2
)}
*
τ
1
∈
(
0,τ
1
)
БИОФИЗИКА том 66
№ 3
2021
532
МОНДАЛ, САМАНТА
Решая уравнения (7.19) и (7.20), имеем:
Теорема 7.5. Пусть точка E* существует и ло-
кально асимптотически устойчива при А1 > 0 и
⎡d
[
Re λ(τ
2
)}]⎤
⎡KM -LN⎤
=
А2 > 0 для системы (2.2) (τ1 = τ2 = 0). Также для
⎢
⎥
⎣
2
2
⎦
dτ
0
K
+
L
⎣
2
⎦
τ
2
=τ
2
τ2 ∈
(0, τ2*) (фиксировано) и τ1
> 0, если
⎡d
[
Re λ(τ
)}]⎤
2
Теперь имеем
>
0
при
2
⎢
⎥
(X
2
+X
4
)2
< X
5
,
тo существует пороговое значе-
⎣
dτ
⎦
0
2
τ2=τ
2
KM > LN. Тем самым условие трансверсальности
ние τ10 такое, что точка E* системы (7.1) устойчи-
доказано. Итак, система
(7.1) демонстрирует
сверхкритическую бифуркацию Хопфа, когда τ2
ва при 0 < τ1 < τ10 и неустойчива при τ1 > τ10 при
достигает своего критического значения τ20 и τ1
условии K'M' > L'N'. Более того, система (7.1) про-
фиксировано в области (0, τ1*).
являет сверхкритическую бифуркацию Хопфа во-
Случай 5: τ1 ∈ (0, τ2*) и τ1 > 0.
круг точки E* при τ1 = τ10, выраженном, как:
⎛
' 2
' 2
' 2
' 2
' 2
' 2
⎞
−
1
Q
+Q
+Q
+Q
−Q
−Q
⎜
1
2
3
4
5
6
⎟
cos
⎜
' 2
' 2
' 2
' 2
⎟
2
Q
+
Q
Q
+Q
'
'
(
1
2
)(
3
4
)
⎡
⎛Q
⎞
⎛Q
⎞⎤
0
⎝
⎠
1
−1
1
−1
3
τ
=
+
tan
−
tan
,
1
⎢
⎜
'
⎟
⎜
'
⎟⎥
γ
γ
Q
Q
2
2
⎣
⎝
2
⎠
⎝
4
⎠⎦
'
4
'
3
'
2
'
'
где τ2 - положительный корень уравнения
R
(γ)
≡γ
+S
γ
+S
γ
+S
γ+S
= 0.
1
1
2
3
4
Здесь
'
S
1
=
{−2X
3
sin(γτ
2
)}
*
,
τ
2
∈
(
0,τ
2
)
'
2
2
S
=
X
−
2X
+
X
+
2X
X
cos(
γτ
)
−
2
X
cos
(γτ
)
,
{
}
*
2
3
2
1
1
3
2
4
2
(
)
2
2
0,τ
τ
∈
'
S
=
{2X
X
sin
(γτ
)
−
2X
X
sin
(
γ
τ
)}
*
,
3
2
3
2
1
4
2
τ
∈
0,τ
2
(
2
)
'
2
2
2
S
=
X
+
X
+
2X
X
cos
(γ
τ
)
−
X
,
4
{
2
4
2
4
2
5
}
*
τ
2
∈
(
0,τ
2
)
'
2
'
Q
1
=
γ
2
−
X
2
,
Q
2
=-
X
1
γ
2
,
'
Q
=
{
X
cos
(
γ
τ
)}
,
3
5
2
2
'
Q
4
=
{−
X
5
sin
(
γ
2
τ
2
)}
,
'
'
Q
5
=
X
4
,
Q
6
=
X
3
γ
2
,
0
0
K′
=
X
+
X
cos(
γ
τ
)
−
X
τ
cos(
γ
τ
)
−
X
γ
τ
sin
(
γ
τ
)
−
X
τ
+τ
cos
γ
τ
+τ
,
{
1
3
2
2
4
2
2
2
3
2
2
2
2
5
(
1
2
)
(
2
(
1
2
))}
*
τ
2
∈
(
0,τ
2
)
0
0
L′
=
−2γ
+
X
sin
(
γ
τ
)
−
X
τ
sin(
γ
τ
)
+
X
γ
τ
cos
(
γ
τ
)
−
X
τ
+τ
sin
γ
τ
+τ
,
{
2
3
2
2
4
2
2
2
3
2
2
2
2
5
(
1
2
)
(
2
(
1
2
))}
*
τ
2
∈
(
0,τ
2
)
0
M′
=
X
γ
sin
γ
τ
+τ
,
{
5
2
(
2
(
1
2
))}
*
τ
2
∈
(
0,τ
2
)
0
N′
=
X
γ
cos
γ
τ
+τ
{
5
2
(
2
(
1
2
))}
*
τ
2
∈
(
0,τ
2
)
Доказательство. Доказательство теоремы та-
d1 = 6.5, k = 0.2, d2 = 15, a1 = 2, a2 = 0.3, b = 5,
кое же, как и в случае 4.
c = 0.7, A = 2, α = 0.3, η = 0.2, e = 2, m = 0.1.
Для этого параметрического набора тривиаль-
8. ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ
ное равновесие точки E0(0,0) является локально
В этом разделе мы выполнили численное мо-
асимптотически устойчивым. На рис. 1 показано
делирование системы (2.2), чтобы проверить ана-
устойчивое поведение точки E0(0, 0) во времени t.
литические результаты. Во-первых, мы выбрали
Эти параметрические значения показывают, что
следующий набор значений параметров: r = 5.5,
транскритическая бифуркация происходит во-
БИОФИЗИКА том 66
№ 3
2021
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
533
Рис. 3. Транскритическая бифуркация вокруг точки
Рис. 1. Устойчивое поведение точки E0(0,0) для
E0(0,0) с d2 в качестве параметра бифуркации; осталь-
набора параметров: r = 5.5, d1 = 6.5, k = 0.2, d2 = 15,
ные параметры такие же, как в наборе данных для
a1 = 2, a2 = 0.3, b = 5, c = 0.7, A = 2, α = 0.3, η = 0.2,
рис.
1. Точка бифуркации (ВР) появляется при
e = 2, m = 0.1.
d1[TC] = 0.0750.
Если мы возьмем d1 = 1.5 < r = 5.5, а другие па-
круг E0(0,0) при d1 = d1[TC] = 5.5 и тривиальное
равновесие точки E0(0,0) теряет свою устойчи-
раметры не изменятся, как показано на рис. 1, то
свободное
от
хищников
равновесие
вость, когда d1 становится меньше d1[TC] (см.
⎛r - d
⎞
рис. 2). К тому же для тех же параметрических
1
E
,0
≡
E
(2,0)
существует и является ло-
1
⎜
⎟
1
значений, представленных на рис. 1, транскритиче-
⎝
a
1
⎠
кально асимптотически устойчивым. Рис. 4 пока-
ская бифуркация появляется при d2 = d2[TC] = 0.0750
зывает устойчивый характер точки E1(2,0) во вре-
около точки E0(0,0), что показано на рис. 3 (ВР
мени t. Из рис. 5 видно, что транскритическая би-
означает точку бифуркации).
фуркация проявляется вокруг точки E1(2,0) при
d2 = d2[TC] = 0.0457 с параметром бифуркации d2.
Рис. 2. Транскритическая бифуркация вокруг точки
E0(0,0) с d1 в качестве параметра бифуркации; осталь-
Рис. 4. Устойчивое поведение равновесия в точке
ные параметры такие же, как в наборе данных для
E1(2, 0), свободной от хищников, при d1 = 1.5; осталь-
рис. 1. Точка бифуркации (ВР - bifurcation point) по-
ные параметры таких же, как в наборе данных для
является при d1[TC] = 5.5.
рис. 1.
БИОФИЗИКА том 66
№ 3
2021
534
МОНДАЛ, САМАНТА
Рис. 5. Транскритическая бифуркация вокруг точки E1(2,0) с d2 в качестве параметра бифуркации; остальные
параметры такие же, как в наборе данных для рис. 4. Точка бифуркации (ВР) появляется при d2[TC] = 0.0457.
Опять же, следует отметить, что если мы возьмем
ся локально асимптотически устойчивым. На
d2 = 0.04 (уровень смертности хищников), а
рис.
6 показан устойчивый характер точки
остальные параметры будут такими же, как на
E*(1.6628, 0.6771).
рис. 4, то осевое равновесие точки E1 будет не-
Теперь мы зафиксируем другой набор пара-
устойчивым, но внутреннее равновесие точки
метров:
E*(x*,y*) ≡ E*(1.6628, 0.6771) существует и являет-
r = 5.5, d1 = 0.6, k = 0.2, d2 = 0.1, a1 = 0.6, a2 = 0.98, b = 5, c = 0.9, A = 8.5, α = 0.3, η = 0.2, e = 2, m = 0.1. (8.1)
Для этих значений параметров все возможные
тически устойчивым. Рис. 9 показывает устойчи-
вый характер E* во времени t. Более того, если
точки равновесия E0, E1, E2 и E* существуют, но
взять k = 0.7 (уровень страха) и оставить осталь-
только внутреннее равновесие E*(x*,y*)
≡
ные параметры, как в вышеперечисленном набо-
≡ E*(1.6445, 9.5689) является локально асимпто- ре данных, то свободное равновесие для жертвы
Рис. 6. Устойчивое поведение точки E*(1.6628, 0.6771) по времени t при d2 = 0.04; остальные параметры такие же, как
в наборе данных для рис. 4.
БИОФИЗИКА том 66
№ 3
2021
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
535
Рис. 8. Транскритическая бифуркация вокруг точки
Рис. 7. Устойчивое поведение точки E2(0, 6.7420) для
E2(0, 6.7420) с k в качестве параметра бифуркации;
= 0.1,
набора параметров: r = 5.5, d1 = 0.6, k = 0.7, d2
остальные параметры такие же, как в наборе данных
a1 = 0.6, a2= 0.98, b = 5, c = 0.9, A = 8.5, α = 0.3, η = 0.2,
для рис. 7. Точка бифуркации (ВР) появляется при
e = 2, m = 0.1.
k[TC] = 0.6703.
E
2
(0, y)
≡E
2
(0, 6.7420)
существует и является ло-
устойчива, ее критерий устойчивости отражен
кально асимптотически устойчивым, что отраже-
на рис. 11. Стоит заметить, что эффект страха мо-
но на рис. 7. Если взять k (уровень страха) в каче-
жет снизить значение точки внутреннего равно-
стве свободного параметра, то для тех же парамет-
весия. Из рис. 10а можно сделать вывод, что по-
рических значений на рис. 7 транскритическая
вышение уровня страха (k) может не только сни-
бифуркация проявляется вокруг точки
зить скорость роста популяции жертвы, но и
E2(0, 6.7420) при k = k[TC] = 0.6703 и E2(0, 6.7420)
уменьшить популяцию хищника при наличии до-
теряет критерий устойчивости, когда k становит-
полнительной пищи. Кроме того, при отсутствии
ся меньше, чем k[TC] (рис. 8).
дополнительного питания (A = 0), как видно из
рис. 10б, рост обоих видов монотонно убывает
В отсутствие действия страха, т.е. при k = 0.0 и
при непрерывном увеличении параметра k. Итак,
остальных параметрах таких же, как в вышепе-
речисленном наборе данных, точка E*(x*,y*) =
изучение эффекта страха при взаимодействии
E*(7.7814,
20.1182) локально асимптотически хищника и жертвы очень важно независимо от
Рис. 9. Устойчивое поведение точки E*(1.6445, 9.5689) по времени t для k = 0.2 (уровень страха); остальные параметры
такие же, как в наборе данных для рис. 7.
БИОФИЗИКА том 66
№ 3
2021
536
МОНДАЛ, САМАНТА
Рис. 10. Влияние параметра k (уровень страха) на характер устойчивого состояния точки E* при A = 8.5 (а) и A = 0.0 (б).
Здесь k ∈ [0.0, 0.3]; остальные параметры такие же, как в наборе данных для рис. 9.
Рис. 11. Устойчивое поведение точки E*(7.7814, 20.1182) при k = 0 (без эффекта страха); остальные параметры такие же,
как в наборе данных для рис. 9.
Рис. 12. Влияние параметра m на характер устойчивого состояния точки E* при k = 0.2 (a) и k = 0.0 (б); остальные
параметры такие же, как в наборе данных для рис. 9.
БИОФИЗИКА том 66
№ 3
2021
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
537
Рис. 13. Влияние параметра m на рост популяции хищников у для разных уровней страха при A = 0; остальные
параметры такие же, как в наборе данных для рис. 9.
дополнительной пищи и является биологически
пользованием программного пакета MATLAB) на
последовательным.
влияние задержек по времени возьмем следую-
Влияние временных задержек. Для изучения
щий набор значений параметров:
численного моделирования системы (7.1) (с ис-
r = 1.5, d1 = 0.05, k = 0.2, d2 = 0.1, a1 = 0.1, a2 = 2, b = 2, c = 0.35, A = 3, α = 0.3, η = 0.4, e = 3, m = 0.1. (8.2)
При τ1 = τ2 = 0 равновесие сосуществования
E*(2.0850, 5.4742) для τ1 = τ2 = 0. Зафиксируем
точки E*(x*,y*) = E*(2.0850, 5.4742) существует и
τ1 = 0 и будем постепенно увеличивать значение
устойчиво для перечисленного набора данных.
τ2. Путем некоторых расчетов получаем порого-
Рис. 14 показывает устойчивый характер точки
вое значение τ2* = 17.6726, для которого точка
Рис. 14. Устойчивое поведение точки E*(2.0850, 5.4742) при τ1 = τ2 = 0 для набора параметров: r = 1.5, d1 = 0.05, k = 0.2,
d2 = 0.1, a1 = 0.1, a2 = 2, b = 2, c = 0.35, A = 3, α = 0.3, η = 0.4, e = 3, m = 0.1. (а) - Поведение во времени, (б) - фазовая
диаграмма.
БИОФИЗИКА том 66
№ 3
2021
538
МОНДАЛ, САМАНТА
Рис. 15. Устойчивое поведение точки E*(2.0850, 5.4742) при τ2 = 5.5 < τ2* = 17.6726 и t1 = 0; остальные параметры такие
же, как в наборе данных для рис. 14. (а) - Поведение во времени, (б) - стабильная спираль.
E*(2.0850, 5.4742) устойчива при 0 < τ2 < τ2* и не-
ражают бифуркационную диаграмму с τ2 в каче-
устойчива при τ2 > τ2*, т.е. система (7.1) теряет
стве параметра бифуркации при τ1 = 0. Аналогич-
устойчивость и совершает колебания предельно-
но, точка E*(2.0850,
5.4742) ассимптотически
го цикла за счет бифуркации Хопфа при τ2* =
устойчива для τ1 < τ1* = 23.8002 и неустойчива
17.6726 вокруг E*(2.0850, 5.4742).
при τ1 > τ1* = 23.8002 когда τ2 = 0, т.е. точка
E*(2.0850, 5.4742) устойчива ниже порогового
Рис. 15 показывает устойчивый характер точки
значения τ1* = 23.8002, а выше его - неустойчива.
E*(2.0850, 5.4742) при τ2 = 5.5 < τ2* = 17.6726, тогда
Рис. 19 отражает устойчивую природу точки
как рис. 16 представляет колебание предельного
цикла для τ2 = 30 > τ2* = 17.6726. Рис. 17 и 18 изоб- E*(2.0850, 5.4742) для τ1 = 15.5 < τ1* = 23.8002 то-
Рис. 16. Существование периодического решения вокруг точки E*(2.0850, 5.4742) с временной задержкой τ2 = 30 >
> τ2* = 17.6726 и τ1 = 0; остальные параметры такие же, как в наборе данных для рис. 14. (а) - Поведение во времени,
(б) - фазовая диаграмма (замкнутая орбита).
БИОФИЗИКА том 66
№ 3
2021
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
539
Рис. 17. Диаграмма бифуркации Хопфа для жертв (x)
Рис. 18. Диаграмма бифуркации Хопфа для хищников
при τ2 в качестве параметра бифуркации.
(у) при τ2 в качестве параметра бифуркациикации.
гда как рис. 20 изображает колебания предельно-
вый характер и совершает колебания предельного
го цикла для τ1 = 45 > τ1* = 23.8002. Рис. 21 и 22
цикла через сверхкритическую бифуркацию
показывают, что система (7.1) проявляет сверх-
Хопфа при τ20 = 11.8244 вокруг точки E*(2.0850,
критичсскую
бифуркацию Хопфа при
5.4742), когда t1 фиксировано в (0, τ1* = 23.8002).
τ1* = 23.8002, когда т2 = 0. Пусть τ1 фиксировано
Рис. 23 показывает устойчивый характер точки
в (0, τ1* = 23.8002) и τ2 постепенно увеличивается.
E*(2.0850, 5.4742) для τ2 = 2.5 < τ20 = 11.8244, тогда
Тогда получаем пороговое значение τ20 = 11.8244
как рис. 24 демонстрирует колебания предельно-
такое, что E*(2.0850,
5.4742) устойчиво для
го цикла при τ2 = 25.5 > τ20 = 11.8244, когда
τ2 < τ20 = 11.8244 и неустойчиво для τ2 > τ20 =
= 11.8244, т.е. система (7.1) теряет свой устойчи-
τ1 = 5.5 фиксировано в (0, τ1* = 23.8002). Рис. 25 и
Рис. 19. Устойчивое поведение точки E*(2.0850, 5.4742) при временной задержке τ1 = 15.5 < τ1* = 23.8002 и τ2 = 0;
остальные параметры такие же, как в наборе данных для рис. 14. (а) - Поведение во времени, (б) - устойчивая траектория.
БИОФИЗИКА том 66
№ 3
2021
540
МОНДАЛ, САМАНТА
Рис. 20. Существование периодического решения вокруг точки E*(2.0850, 5.4742) с временной задержкой τ1 = 45 > τ1* =
= 23.8002 и τ2 = 0; остальные параметры такие же, как в наборе данных для рис. 14. (а) - Поведение во времени, (б) -
фазовая диаграмма (замкнутая орбита). .
26 изображают бифуркационную диаграмму с τ2 в
жает бифуркационную диаграмму с учетом τ1 в
качестве параметра бифуркации при фиксиро-
качестве бифуркационного параметра, когда τ2
ванном τ1 = 5.5. Таким же образом, принимая
фиксировано в (0, 17.6726).
τ2 = 2.5 ∈ (0, τ2* = 17.6726), можно увидеть из
рис. 27 и 28, что точка E*(2.0850, 5.4742) устойчи-
ЗАКЛЮЧЕНИЕ
ва при τ1 = 5.5 < τ10 = 18.8575 и неустойчива при
В данной работе для анализа воздействия стра-
τ1 = 35.5 > τ10 = 18.8575, т.е. система (7.1) выпол-
ха на виды добычи была сформулирована система
няет колебания предельного цикла от устойчиво-
«хищник-жертва» Беддингтона-ДеАнгелиса в
присутствии дополнительной пищи, включаю-
го характера при увеличении значения τ1 через
щая убежище для добычи. Наша цель - аналити-
пороговое значение τ10 = 18.8575. Рис. 29 изобра-чески и численно исследовать влияние страха
Рис. 21. Диаграмма бифуркации Хопфа для жертв (x) при τ1 в качестве параметра бифуркации.
БИОФИЗИКА том 66
№ 3
2021
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
541
Рис. 22. Диаграмма бифуркации Хопфа для хищников (у) при τ1 в качестве параметра бифуркации.
хищников на популяцию жертв. Математически
влияет на популяцию жертвы, но также влияет на
мы вывели положительность и равномерную
динамику предложенной системы следующим
ограниченность решений. Обсуждены критерии
образом:
вымирания обеих популяций. Были изучены ма-
1. На рис. 9 и 11 стоит обратить внимание на то,
тематические свойства, такие как равномерное
постоянство, анализ равновесия, локальный и
что эффект страха на виды добычи может умень-
глобальный анализ устойчивости предложенной
шить значение компонентов х и у уникального
системы. Мы также вывели достаточные условия
положительного равновесия точки E*: по мере
возникновения транскритической бифуркации
увеличения уровня страха k прирост обеих попу-
вокруг каждого граничного равновесия. Числен-
ляций постепенно снижается независимо от до-
но было показано, что эффект страха не только
полнительной пищи (см. рис. 10).
Рис. 23. Устойчивое поведение точки E*(2.0850, 5.4742) при временной задержке τ1 = 5.5 ∈ (0, τ1* = 23.8002)
(фиксирована) и τ2 = 2.5 < τ20 = 11.8244; остальные параметры такие же, как в наборе данных для рис. 14. (а) -
Поведение во времени, (б) - устойчивая фазовая диаграмма.
БИОФИЗИКА том 66
№ 3
2021
542
МОНДАЛ, САМАНТА
Рис. 24. Существование периодического решения вокруг точки E*(2.0850, 5.4742) с временной задержкой τ1 = 5.5 ∈
∈ (0, τ1* = 23.8002) (фиксирована) и τ2 = 25.5 > τ20 = 11.8244; остальные параметры такие же, как в наборе данных для
рис. 14. (а) - Поведение во времени, (б) - фазовая диаграмма (замкнутая орбита).
2. Убежище жертвы влияет на динамику попу-
ней страха, когда m достигает высокого значения
ляции. Рис. 12 показывает, что с постепенным
(см. рис. 13).
увеличением параметра убежища жертвы m зна-
Эти результаты показывают, что влияние стра-
чение у* уменьшается, несмотря на эффект стра-
ха и убежища жертвы очень значимо в присут-
ха. Но популяция хищников не вымирает из-за
ствии дополнительной пищи, которая может обо-
предоставления дополнительных кормов. Отсюда
гатить динамику предлагаемой нами системы
можно сделать вывод, что дополнительная пища
«хищник-жертва» (2.2).
может контролировать популяцию хищников
Более того, эффект страха не снижает мгно-
от вымирания, что является биологически устой-
венно рождаемость видов-жертв, но требуется
чивым.
некоторое время, чтобы повлиять на скорость
3. В отсутствие дополнительной пищи популя-
рождаемости жертв. Также хищнику нужно вре-
ция хищников вымирает из-за различных уров- мя, чтобы переварить пищу. Итак, изучение фак-
Рис. 25. Диаграмма бифуркации Хопфа для жертв (x) при τ2 в качестве параметра бифуркации при τ1, фиксированном
в области (0, τ1*).
БИОФИЗИКА том 66
№ 3
2021
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
543
Рис. 26. Диаграмма бифуркации Хопфа для хищников (у) при τ2 в качестве параметра бифуркации при τ1,
фиксированном в области (0, τ1*).
торов задержки τ1 и τ2 делает систему (7.1) более
бифуркацию Хопфа для непрерывного увеличе-
реалистичной и сложной. Система с задержкой
ния параметров задержки.
(7.1) демонстрирует все динамические свойства,
которые могут обсуждаться относительно систе-
мы без задержки (2.2). В этой статье мы изучили
БЛАГОДАРНОСТИ
влияние двух факторов запаздывания на внутрен-
Авторы благодарны квалифицированному ре-
нюю точку равновесия. Обсуждены все возмож-
цензенту и редактору за их внимательное чтение,
ные комбинации двух типов факторов задержки.
Численно наблюдается, что предложенная систе-
ценные комментарии и полезные предложения,
ма теряет свою устойчивость и выполняет колеба-
которые помогли значительно улучшить пред-
ния предельного цикла через сверхкритическую
ставление этой работы.
Рис. 27. Устойчивое поведение точки E*(2.0850, 5.4742) при временной задержке τ2 = 2.5 ∈ (0, τ2* = 17.6726)
(фиксирована) и τ1 = 5.5 < τ10 = 18.8575; остальные параметры такие же, как в наборе данных для рис. 14. (а) -
Поведение во времени, (б) - устойчивая траектория).
БИОФИЗИКА том 66
№ 3
2021
544
МОНДАЛ, САМАНТА
Рис. 28. Существование периодического решения вокруг точки E*(2.0850, 5.4742) с временной задержкой τ2 = 2.5 ∈
∈ (0, τ2* = 17.6726) (фиксирована) и τ1 = 35.5 > τ10 = 18.8575; остальные параметры такие же, как в наборе данных для
рис. 14. (а) - Поведение во времени, (б) - фазовая диаграмма (замкнутая орбита). .
Рис. 29. Бифуркационные диаграммы Хопфа с τ1 в качестве параметра бифуркации и τ2, фиксированном в области
(0, τ2*): (а) - для жертв, (б) - для хищников.
КОНФЛИКТ ИНТЕРЕСОВ
СПИСОК ЛИТЕРАТУРЫ
1. R. J. Taylor, Predation (Chapman & Hall, N. Y., 1984).
Авторы заявляют об отсутствии конфликта
2. S. L. Lima and L. M. Dill, Canadian J. Zool. 68 (4), 619
интересов.
(1990).
3. C. S. Holling, The Canadian Entomologist 91 (5), 293
(1959).
СОБЛЮДЕНИЕ ЭТИЧЕСКИХ СТАНДАРТОВ
4. C. S. Holling, The Canadian Entomologist 91 (7), 385
Настоящая работа не содержит описания ис-
(1959).
следований с использованием людей и животных
5. C. S. Holling, Memoirs Entomol. Soc. of Canada 97
в качестве объектов.
(S45), 5 (1965).
БИОФИЗИКА том 66
№ 3
2021
ВЛИЯНИЕ СТРАХА НА СИСТЕМУ С ЗАДЕРЖКОЙ «ХИЩНИК-ЖЕРТВА»
545
6. J. R. Beddington, J. Animal Ecol. 44 (1), 331 (1975).
20. P. D. N. Srinivasu and S. R. V. P. Bhuvanagiri, Journal
7. D. L. DeAngelis, R. A. Goldstein, and R. V. O’Neill,
of Mathematical Biology 60, 591 (2010).д
Ecology 56 (4), 881 (1975).
21. P. D. N. Srinivasu and B. S. R. V. Prasad, Bul. Math.
8. R. Arditi and L. R. Ginzburg, J. Theor. Biol. 139 (3),
Biol. 73 (10), 2249 (2011).
311 (1989).
22. T. K. Kar, Communications in Nonlinear Science and
9. S. Creel and D. Christianson, Trends Ecology & Evo-
Numerical Simulation 10 (6), 681 (2005).
lution 23 (4),194 (2008).
23. R. S. Cantrell and C. Cosner, J. Math. Analysis and Ap-
10. L. Y. Zanette, M. C. Allen, A. F. White, and
plications 257 (1), 206 (2001).
M. Clinchy, Science 334 (6061), 1398 (2011).
24. A. Das and G. P. Samanta, Physica A: Statistical Me-
11. S. Creel, D. Christianson, S. Liley, and J. A. Winnie,
chanics and its Applications 538, 122844 (2020).
Science 315 (5814), 960 (2007).
25. J. P. Tripathi, S. Abbas, and M. Thakur, Non-Linear
12. W. Cresswell, J. Ornithol. 152 (S1), 251 (2010).
Dynamics 80, 177 (2015).
13. X. Wang, L. Zanette, and X. Zou, J. Math. Biol. 73,
26. G. Birkhoff and G. C. Rota, Ordinary Differential
1179 (2016).
Equations (John Wiley and Sons, N. Y., 1989).
14. S. Mondal, A. Maiti, and G. P. Samanta, Biophys. Rev.
27. J. K. Hale, Theory of Functional Differential Equations
Lett. 13 (4), 157 (2018).
(Springer-Verlag, N. Y., 1977).
15. H. Zhang, Y. Cai, S. Fu, and W. Wang, Appl. Math.
28. L. Perko, Differential Equations and Dynamical Systems
Comput. 356, 328 (2019).
(Springer, N. Y., 2001).
16. S. Mondal and G. P. Samanta, J. Phys. A: Math. Theor.
29. S. Mondal and G. P. Samanta. Physica A: Statistical
53
(29),
295601
(2020). DOI:
10.1088/1751-
Mechanics and its Applications 534, 122301 (2019).
8121/ab81d8
30. S. Mondal and G. P. Samanta, Energy, Ecology and
17. P. J. Wangersky and W. J. Cunningham, Ecology 38
Environment 5 (1), 12 (2020).
(1), 136 (1957).
31. S. Ruan and J. Wei, Dynamics of Continuous, Discrete
18. E. Beretta and Y. Kuang, J. Math. Anal. Appl. 204, 840
and Impulsive Systems Series B: Applications and Al-
(1996).
gorithms 10, 863 (2003).
19. P. D. N. Srinivasu, S. R. V. P. Bhuvanagiri, and
32. H. I Freedman and V. S. H. Rao, Bul. Math. Biol. 45,
M. Venkatesulu, Theor. Popul. Biol. 72, 111 (2007).
991 (1983).
Impact of Fear Effect in a Delayed Predator-Prey System with Prey Refuge
and Additional Food for Predators
S. Mondal and G.P. Samanta
Indian Institute of Engineering Science and Technology, Shibpur, Howrah-711103, India
Evidence from field experiments on terrestrial vertebrates shows that direct predation by predators on preys
might not only affect the population dynamics but also have an indirect effect on the predator's fear (felt by
prey) through chemical and/or vocal cues, reduce the prey reproduction and change the life-history of spe-
cies. In the present work, the impact of the fear effect on the prey has been investigated in a Beddington-
DeAngelis predator-prey system with prey refuge and additional food for predators. Firstly, we have discussed
the properties of solutions such as positivity and uniform boundedness that enable the proposed system to
work properly. Criteria for the existence of equilibrium points, local and global stability analysis of all equi-
librium points are derived. Secondly, the conditions for the occurrence of transcritical bifurcations are pre-
sented. Furthermore, we have studied the local stability behavior of the coexistence equilibrium point for var-
ious combinations of the delay factors and found that continuous increment of the delay parameters can re-
place a stable equilibrium by the stable limit cycle oscillations through supercritical Hopf-bifurcation.
Extensive numerical simulations are performed via MATLAB to validate our analytical findings. Numerical-
ly, the impact of prey refuge on the survival of the predator in the presence of additional food is shown.
Keywords: prey refuge, fear effect, additional food, local bifurcations, global stability, time-delays
БИОФИЗИКА том 66
№ 3
2021