БИОФИЗИКА, 2021, том 66, № 5, с. 997-1004
БИОФИЗИКА СЛОЖНЫХ СИСТЕМ
УДК 531.391:612.76
СРАВНИТЕЛЬНЫЙ АНАЛИЗ АЛГОРИТМОВ ОЦЕНКИ ДВИЖЕНИЯ
ЦЕНТРА МАСС ПО РЕЗУЛЬТАТАМ
СТАБИЛОМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ
© 2021 г. П.А. Кручинин, М.А. Подоприхин, И.Д. Бекеров
Механико-математический факультет Московского государственного университета имени М.В. Ломоносова,
119992, Москва, Ленинские горы, 1
Е-mail: pkruch@mech.math.msu.su, podoprikhin.maxim@gmail.com, omert14@yandex.ru
Поступила в редакцию 29.12.2020 г.
После доработки 07.07.2021 г.
Принята к публикации 08.07.2021 г.
Сравниваются подходы к определению горизонтальных координат центра масс, применимые для
стабилоанализаторов, измерениями которых являются только вертикальные составляющие усилий.
Первый из этих подходов использует информацию не только о начальном положении и скорости
центра масс, но и о его финальном состоянии. Второй связан с использованием предположения об
отсутствии неустойчивых составляющих в движении и использует методы частотной фильтрации.
Известные алгоритмы модифицированы для решения задачи в условиях совершения человеком до-
статочно интенсивных движений. Рассмотренные модифицированные алгоритмы сравнивались
для записей движений обследуемых, выполнявших на стабилоанализаторе пробу со ступенчатым
отклонением. Одновременно система видеокамер использовалась для определения координат мар-
кера, закрепленного приближенно на высоте центра масс. Продемонстрирована работоспособ-
ность всех модифицированных алгоритмов. Отмечено, что погрешность метода оценивания, ис-
пользующего двойную фильтрацию в прямом и обратном времени, оказалась меньше, чем у других
процедур.
Ключевые слова: стабилометрия, постурология, центр масс, центр давления, некорректная задача,
регуляризация.
DOI: 10.31857/S0006302921050197
В современной медицине широкое распро-
при поддержании вертикальной позы, но требует
странение получил простой и дешевый метод ста-
уточнений при совершении более интенсивных
билометрических исследований. Их проводят с
движений.
использованием стабилоанализатора - измери-
Задача определения положения центра масс по
тельного комплекса, предназначенного для реги-
показаниям силовой платформы при ходьбе на
страции, обработки и анализа перемещения цен-
временах порядка секунды достаточно успешно
тра давления при стоянии человека на плоскости
опоры. Эти показания используют для выявления
решалась в результате простого численного инте-
двигательно-координационных нарушений и их
грирования [10, 11]. При удержании человеком
реабилитации. Удержание равновесия при стоя-
равновесия в основной позе требуется решение
нии является динамическим процессом, в ходе
этой задачи для более продолжительных времен-
которого перемещения центра давления могут за-
ных интервалов порядка десятков секунд или да-
метно отличаться от проекции центра масс на
же минут. Задачу необходимо решать с привлече-
плоскость опоры. Различие этих точек порождает
нием математической модели движения челове-
задачу оценивания проекции центра масс на
ка. Обычно в качестве такой модели используется
плоскость опоры по показаниям стабилоанализа-
модель перевернутого маятника. Однако даже ис-
тора. Решение этой задачи востребовано в совре-
пользование простейшей модели приводит к по-
менных исследованиях (см., например, работы
становке математически некорректной задачи:
[1-9]). При этом в ряде случаев (например, в ра-
для ее решения приходится интегрировать чис-
ботах [7, 9]) в качестве оценки движения центра
ленно дифференциальное уравнение переверну-
масс используют медленную (<0.5 Гц) составляю-
того маятника, решение которого неустойчиво. В
щую движений центра давления. Такой подход
этом случае имеет место экспоненциальное на-
приемлем в задачах анализа движений человека
растание ошибки оценивания и для парирования
997
998
КРУЧИНИН и др.
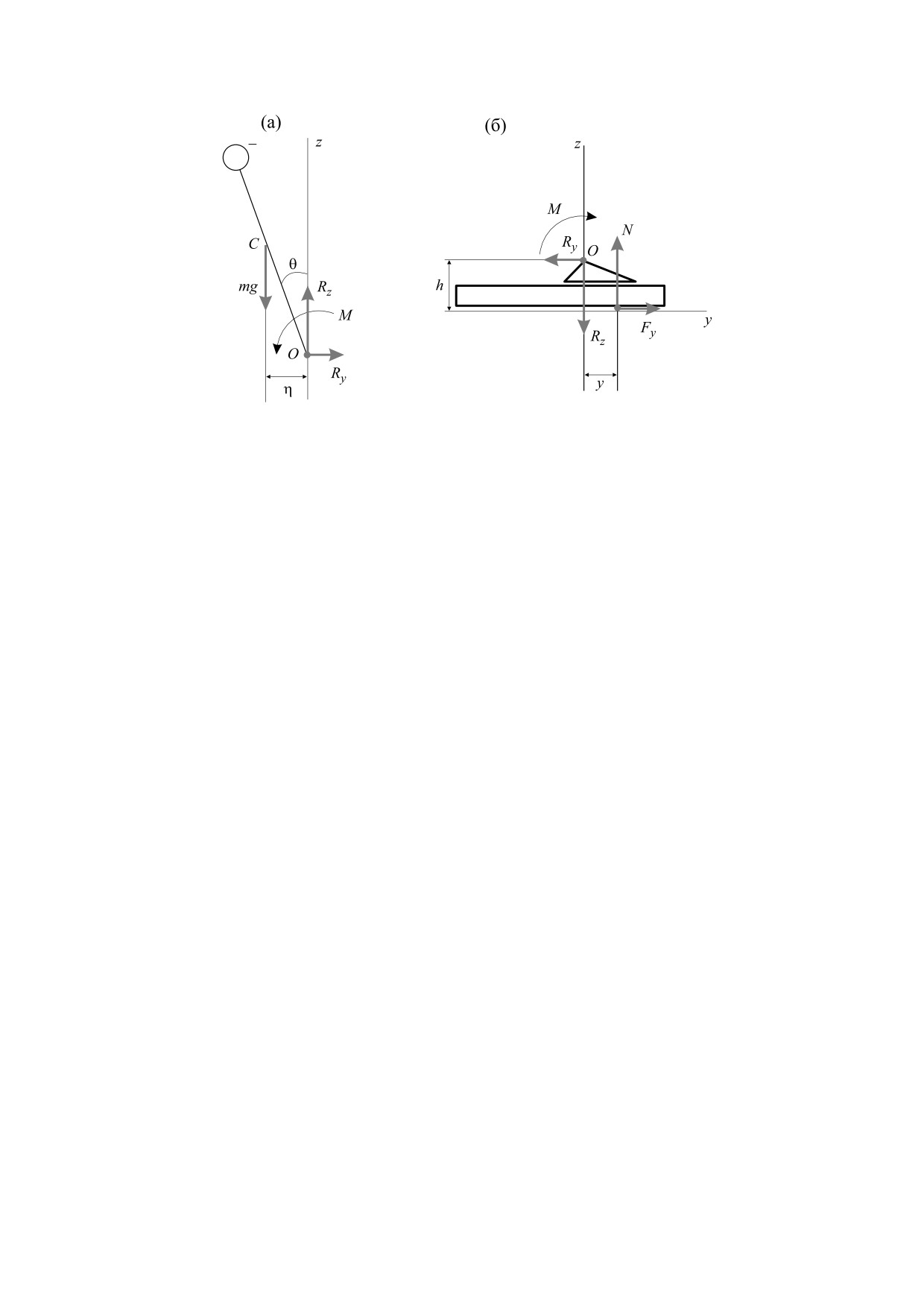
Рис. 1. Модель движений человека в сагиттальной плоскости. Показаны силы, действующие на модель стержня,
имитирующего тело человека (a), и на систему «стопы ног - платформа стабилоанализатора» (б).
погрешности необходимо привлекать дополни-
мов «zero-point-to-zero-point integration», когда
тельную информацию.
измерения горизонтальных сил не используются
[14].
При использовании многокомпонентных си-
ловых платформ используется способ коррекции
2. Используется предположение об отсутствии
результатов численного интегрирования при ра-
экспоненциальных составляющих в движении в
венстве нулю проекций реакции опоры на одну из
решении уравнений движения системы. Тогда за-
горизонтальных осей [12-14]. Этот способ полу-
дача сводится к анализу «установившихся» реше-
чил название
«zero-point-to-zero-point integra-
ний [1, 13, 15-17].
tion». В соответствии с теоремой о движении цен-
Соответствующие алгоритмы известны в лите-
тра масс в момент времени, когда горизонтальная
ратуре и достаточно успешно используются при
составляющая реакции опоры равна нулю, центр
анализе удержания человеком вертикальной по-
масс и центр давления лежат на одной отвесной
зы. Использование подобных алгоритмов в зада-
линии. В работах [12] и [14] предлагается исполь-
чах с интенсивным движением в окрестности
зовать для восстановления движения центра масс
вертикальной позы, таких как проба со ступенча-
интервалы между моментами с нулевой величи-
тым воздействием [18], в литературе не обсужда-
ной горизонтальной составляющей реакции опо-
лось. Между тем применяемые алгоритмы требу-
ры. Тогда определение координат центра масс
ют некоторой модификации.
сводится к решению краевой задачи.
Рассмотрим подробно алгоритмы, основан-
Сравнение методов оценки положения центра
ные на упомянутых выше способах регуляриза-
масс с использованием различных наборов изме-
ции задачи. Эти алгоритмы опираются на модель
рительной информации проведено в работе [13].
движения человека в виде перевернутого маят-
На практике часто используются простые сило-
ника.
вые платформы (стабилоанализаторы), у которых
измерение горизонтальных усилий отсутствует.
Сравнение же различных модификаций алгорит-
МОДЕЛЬ ДВИЖЕНИЯ ЧЕЛОВЕКА
мов определения положения центра масс для та-
Для моделирования движения человека вос-
ких систем не проводилось.
пользуемся традиционными моделями перевер-
Известные методы определения положения
нутого маятника, подробно описанными в рабо-
центра масс, применимые для стабилоанализато-
тах [19, 20]. Рассмотрим малые колебания челове-
ров, измерениями которых являются только вер-
ка в окрестности основной позы, когда его тело
тикальные составляющие усилий, разделим по
расположено вблизи вертикали, а ноги находятся
виду применяемой дополнительной информа-
примерно на ширине плеч. Рассмотрим для опре-
ции:
деленности модель движения человека в сагит-
1. Используется информация не только о на-
тальной плоскости.
чальном положении и скорости центра масс, но и
Для описания колебаний человека примем
о финальном положении и скорости (см., напри-
традиционную модель перевернутого маятника,
мер, работу [8]). Подобные приемы могут исполь-
изображенную на рис. 1. Предполагаем, что тело
зоваться на этапах модифицированных алгорит-
человека в ходе теста допустимо моделировать
БИОФИЗИКА том 66
№ 5
2021
СРАВНИТЕЛЬНЫЙ АНАЛИЗ АЛГОРИТМОВ ОЦЕНКИ ДВИЖЕНИЯ
999
недеформируемым стержнем массы m, закреп-
t
t
−
T
T
ленным шарнирно в точке O - проекции центров
η=
С
e
+С
e
+η
(4)
1
2
чн
голеностопных суставов. Центр масс стержня
Константы С1 и С2 определяются начальными
расположен в точке C, удаленной от точки O на
расстояние ls. Момент инерции стержня относи-
условиями η0 и v0, а ηчн - частное решение неод-
тельно фронтальной оси, проходящей через точку
нородного уравнения (3). В общем случае С2 ≠ 0 и
О, равен J. Отклонение стержня от вертикали
соответствующее слагаемое экспоненциально
опишем углом θ. Через Ms обозначим момент, со-
нарастает. Таким образом, ошибки в задании на-
здаваемый мышцами в голеностопном суставе,
чальных условий, погрешности модели и стаби-
приложенный, как показано на рис. 1. Будем счи-
лометрических измерений будут приводить к ка-
тать, что стопа неподвижна относительно плат-
тастрофическому нарастанию ошибки оценки на
формы. Уравнения движения для малых значе-
временах t > T ≈ 0.5 с. Как отмечалось выше, ком-
ний угла θ и скорости его изменения запишем в
пенсации этой погрешности можно добиться дву-
следующем виде:
мя способами: добавлением информации о фи-
нальных условиях или использованием информа-
Jθ
= mgl
s
θ+M
s
,
(1)
ции о том, что момент в голеностопном суставе
обеспечивает устойчивость движения человека и
где g - ускорение свободного падения. Соотно-
компенсирует соответствующие неустойчивые
шения для момента Ms получим на основании
слагаемые.
условий равновесия системы «платформа-сто-
па», выразив в соответствии с работой [20] проек-
цию реакции опоры F на сагиттальную ось из тео-
АЛГОРИТМ ПРИВЕДЕНИЯ
ремы о движении центра масс:
К КРАЕВОЙ ЗАДАЧЕ
M
s
= Ny + Fh = Ny - ml
s
hθ,
(2)
Предложение использовать в качестве началь-
ного и конечного моменты времени t0 и tf, при ко-
где N - нормальная реакция опоры, y - сагит-
тальная координата центра давления, отсчитыва-
торых равна нулю проекция горизонтальной со-
емая от оси голеностопного сустава, а h - рассто-
ставляющей реакции опоры, высказано в работе
яние от точки О до плоскости, образованной чув-
[12]. При отсутствии измерений горизонтальных
ствительными элементами платформы.
составляющих реакции опоры воспользуемся
предположением о том, что при спокойном стоя-
Используем соотношения (1) и (2) для записи
нии средние значения этих составляющих равны
следующего уравнения:
нулю либо пренебрежимо малы, как это сделано в
2
T
l
=l
θ+ y
работе [8]. Тогда средние значения координат
s
s
центра давления и центра масс будут совпадать, а
Здесь учитывается, что при малых колебаниях
средняя скорость движения центра давления бу-
можно приближенно считать, что N = mg, и при-
дет равна нулю. Для реализации алгоритма потре-
2
J + ml
s
h
нято обозначение
T
=
Учитывая, что
буем проводить обследование с интенсивным
mgl
s
движением следующим образом: перед выполне-
для малых движений, при которых угол наклона
нием движения обследуемый находится в основ-
не превышает нескольких градусов, для коорди-
ной стойке в течение интервала времени [t0, tp] и
наты центра масс верно равенство η = -lsθ, полу-
не совершает интенсивных движений; затем со-
чим дифференциальное уравнение, связывающее
вершается движение, после него в течение интер-
координаты центра масс η и центра давления y:
вала времени [ts, tf] проводится запись движений
2
человека, стоящего спокойно и не совершающего
T η
=η-y
(3)
интенсивных движений. Средние значения коор-
Это уравнение может быть использовано для
динат центра масс и центра давления на интерва-
отыскания координаты центра масс в результате
лах времени спокойного стояния совпадают, а
решения задачи Коши при начальных условиях
средние скорости их изменения равны нулю. В
соответствии с этим вместо краевых условий ис-
η(0)
=η η(0) = v
0
0
пользуем следующие соотношения:
Отметим, что уравнение (3) не меняет вид при
t
p
t
p
изменении начала отсчета координат и может
η(t
1
)dt
1
=
y(t
1
)dt
1
;
применяться непосредственно к показаниям ста-
билоанализатора независимо от выбранного на-
t
0
t
0
t
f
t
f
чала отсчета.
Уравнение (3) имеет два действительных кор-
η(t
1
)dt
1
=
y(t
1
)dt
1
;
(5)
ня: λ1 = -1/Т и λ2 = 1/Т. Его решение имеет сле-
t
s
t
s
η(t ) -η(t
)
=
0;
η(t
)
-
η(t )
=
0.
дующий вид:
p
0
f
s
БИОФИЗИКА том 66
№ 5
2021
1000
КРУЧИНИН и др.
За оценки положения центра масс принима-
В силу уравнения (3) Фурье-образы функций χ
ются решения системы (3), (5). Для дискретизи-
и δ связаны также уравнением вида (7) с переда-
рованной задачи при наличии N измерений коор-
точной функцией G(s) из (6). Тогда оценка вели-
динат центра давления получим (N + 2) уравне-
чины χ по известной δ с помощью описанной вы-
ний, решение которых будем получать методом
ше процедуры будет лишена описанного недо-
наименьших квадратов [21].
статка, так как δ(t0) = δ(tf).
Алгоритм построения оценки координаты
центра масс будет иметь следующий вид
АЛГОРИТМЫ ФИЛЬТРАЦИИ
1. Вычисляем константы a и b по формулам (9)
Для использования предположения об отсут-
и функцию δ(t) из уравнения (8).
ствии экспоненциальных составляющих, порож-
2. Вычисляем Фурье-образ Y(ω) от функции
денных решением однородного уравнения, запи-
шем передаточную функцию, соответствующую
δ(t).
уравнению (3):
3. Вычисляем N(ω) в соответствии с уравнени-
ем (7)
1
G s)
=-
(6)
4. Используя обратное преобразование Фурье
2
2
T
s
-1
вычисляем χ(t) как праобраз N(ω).
Рассмотрим Фурье-образы N(ω) и Y(ω) функ-
5. Оценку координаты центра масс получаем
ций η(t) и y(t). В силу уравнения (3) эти функции
по формуле (10).
связаны между собой соотношением.
Фильтрация в прямом и обратном времени. Для
N(ω) = G(iω)Y(ω).
(7)
обоснования этого алгоритма представим переда-
точную функцию G(s) в виде произведения
В этом случае последовательность операций
«преобразование Фурье показаний стабилоана-
G(s) = -G1(s)G2(s),
лизатора → умножение на передаточную функ-
1
1
цию → обратное преобразование Фурье» позво-
гдеG s)
=
иG s)
=
1
2
ляет получить искомую оценку. Тем не менее
Ts
-1
Ts
+1
прямое применение этого алгоритма, изложенно-
Передаточной функции G2(s) соответствует
го в работах [6, 13], приводит к значимым погреш-
уравнение устойчивого фильтра:
ностям оценивания вблизи границ интервала
T
,
(11)
[t0, tf]. Эта погрешность не связана с видом (4) ре-
шения однородной системы. Она объясняется
а передаточной функции G1(s) соответствует
тем, что применение преобразования Фурье на
уравнение неустойчивого фильтра
интервале времени [t0, tf] предполагает периоди-
ческое продолжение исследуемой функции на
T
(12)
всю числовую ось. В этом случае, если y(t0) ≠ y(tf),
Фильтр (12) имеет единственный положитель-
продолженная функция в точках t0 и tf имеет раз-
ный корень и устойчив в обратном времени. В
рыв первого рода. Описание этого разрыва по-
итоге процедура сводится к последовательной
рождает высокочастотные составляющие, кото-
фильтрации показаний стабилоанализатора
рые искажаются при применении преобразова-
фильтром (11) в прямом времени и последующей
ния (7). При исследовании спокойного стояния
фильтрации (12) в обратном времени.
разрыв граничных условий незначителен и ошиб-
Оба алгоритма практически эквивалентны и
ки малы. При анализе ступенчатых движений
требуют достаточно сложных вычислений. Вы-
ошибка становится соизмеримой с величиной
числения алгоритма двойной фильтрации проще,
полезного сигнала. Компенсировать такую по-
но применение алгоритма преобразований Фурье
грешность можно двумя способами.
может оказаться предпочтительней в случае, ко-
Удаление линейного дрейфа. Представим функ-
гда требуется дополнительная обработка резуль-
цию y(t) в виде суммы
татов, например, вычисления ускорения центра
масс или момента в голеностопном суставе. В
y(t) = a(t - t0) + b + δ(t),
(8)
этом случае операцию численного дифференци-
где
рования можно обойти, переписав передаточную
функцию G(s). Объем вычислений при этом уве-
y(t
f
)
-
y(t
0
a
=
);
b = y(t
).
(9)
личится несущественно, и его одновременно
0
t
−
t
можно дополнять частотной фильтрацией.
f
0
Этот алгоритм, в отличие от приведения к кра-
Оценка координаты центра масс в этом случае
евой задаче, не требует интервалов спокойного
может быть представлена в виде
стояния в начале и конце записи и поэтому может
η=
at -
t
)+
b
+
χ(t).
(10)
использоваться при обработках любых обследо-
0
БИОФИЗИКА том 66
№ 5
2021
СРАВНИТЕЛЬНЫЙ АНАЛИЗ АЛГОРИТМОВ ОЦЕНКИ ДВИЖЕНИЯ
1001
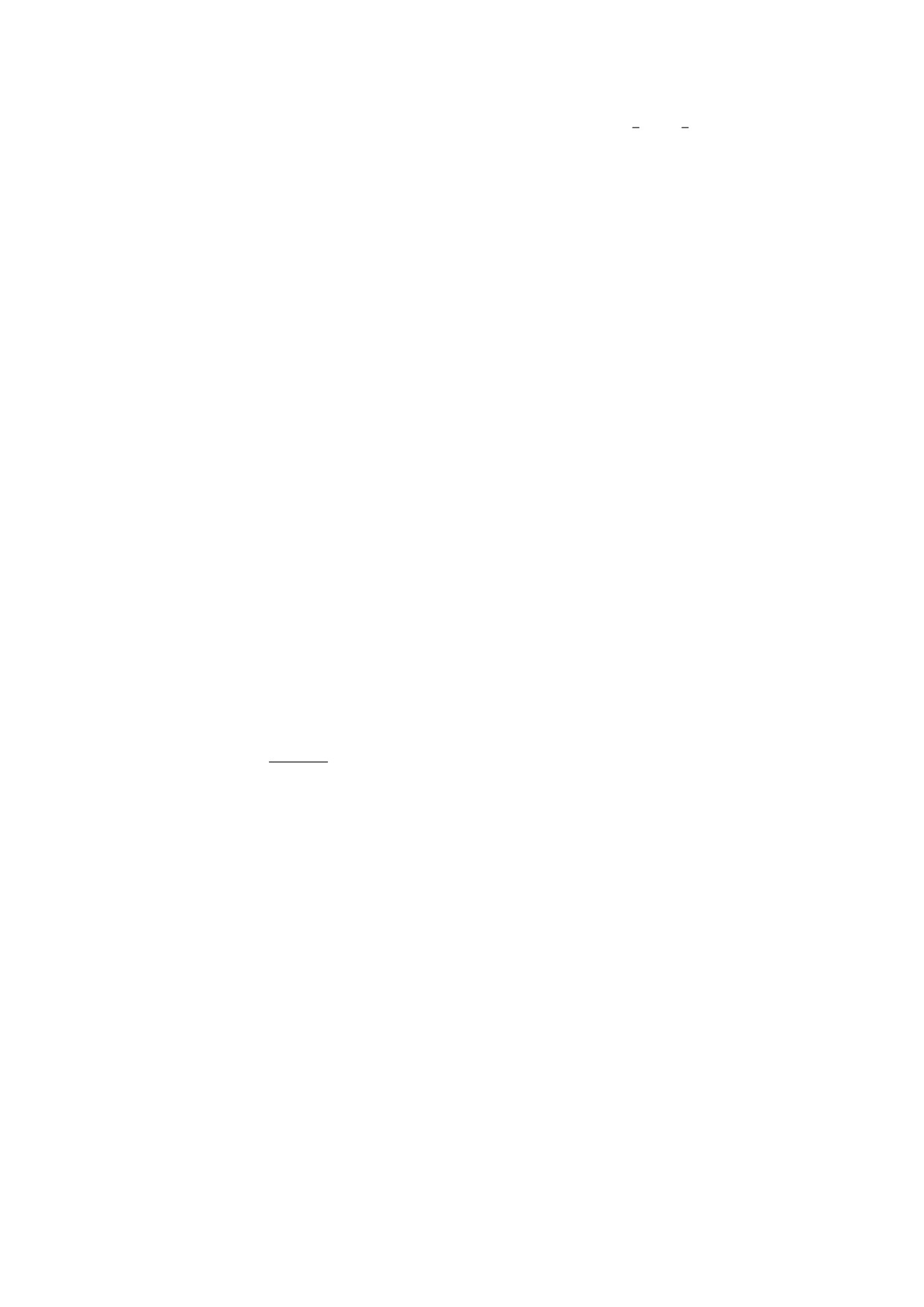
Рис. 2. Пример показаний измерительных систем на интервале возвратного движения. Сплошной линией показана
сагиттальная координата маркера системы видеоанализа на поясе обследуемого, пунктирной - показания
стабилоанализатора.
ваний, в ходе которых человек не совершал зна-
РЕЗУЛЬТАТЫ СРАВНЕНИЯ АЛГОРИТМОВ
чимых изменений позы.
На основании данных, полученных из обсле-
дования, по приведенным алгоритмам вычисляли
координаты центра масс. Расчеты проводили для
ПРОВЕДЕНИЕ ПРОБ ДЛЯ СРАВНЕНИЯ
следующих значений переменных: высоту центра
АЛГОРИТМОВ
масс ls над голеностопом в основной стойке счи-
тали равной половине роста, J принимали рав-
Для сравнения погрешностей алгоритмов в ла-
ным моменту инерции стержня длины 2ls.
боратории математического обеспечения имита-
Величину h принимали равной h = 0.1 м. Такое
ционных динамических систем механико-мате-
приближение принимали намеренно, в соответ-
матического факультета МГУ имени М.В. Ломо-
ствии с возможностями получения быстрых гру-
носова проведены записи движений четырех лиц
бых оценок в ходе обследований.
мужского пола различной комплекции в возрасте
от 20 до 60 лет, выполнявших на стабилоанализа-
Для сравнения алгоритмов исходные записи
торе «Стабилан 2-01» (ЗАО ОКБ «РИТМ», Таган-
были поделены на 20-секундные интервалы. Рас-
сматривали два типа временных интервалов: ин-
рог) пробу со ступенчатым отклонением в соот-
ветствии с работой [18]. Одновременно система
тервалы, на которых человек находился в «состо-
янии покоя» (не совершал интенсивных движе-
видеокамер ARTtrack и программа захвата изоб-
ний), и интервалы, на которых человек совершал
ражений использовались для определения ко-
активное движение (наклон вперед или возвра-
ординат маркера, закрепленного на поясе челове-
щение в исходную позицию). Для каждого обсле-
ка, приближенно на высоте центра масс.
дуемого в итоге было выбрано по 20 интервалов
Проба состояла в следующем. Испытуемый
спокойного стояния и 20 интервалов интенсив-
стоял на платформе стабилоанализатора. В ходе
ного движения. Характерный вид показаний из-
теста он должен быстро изменить положение ту-
мерительных систем при активном движении по-
ловища в сагиттальной плоскости за счет измене-
казан на рис. 2.
ния угла в голеностопном суставе на произволь-
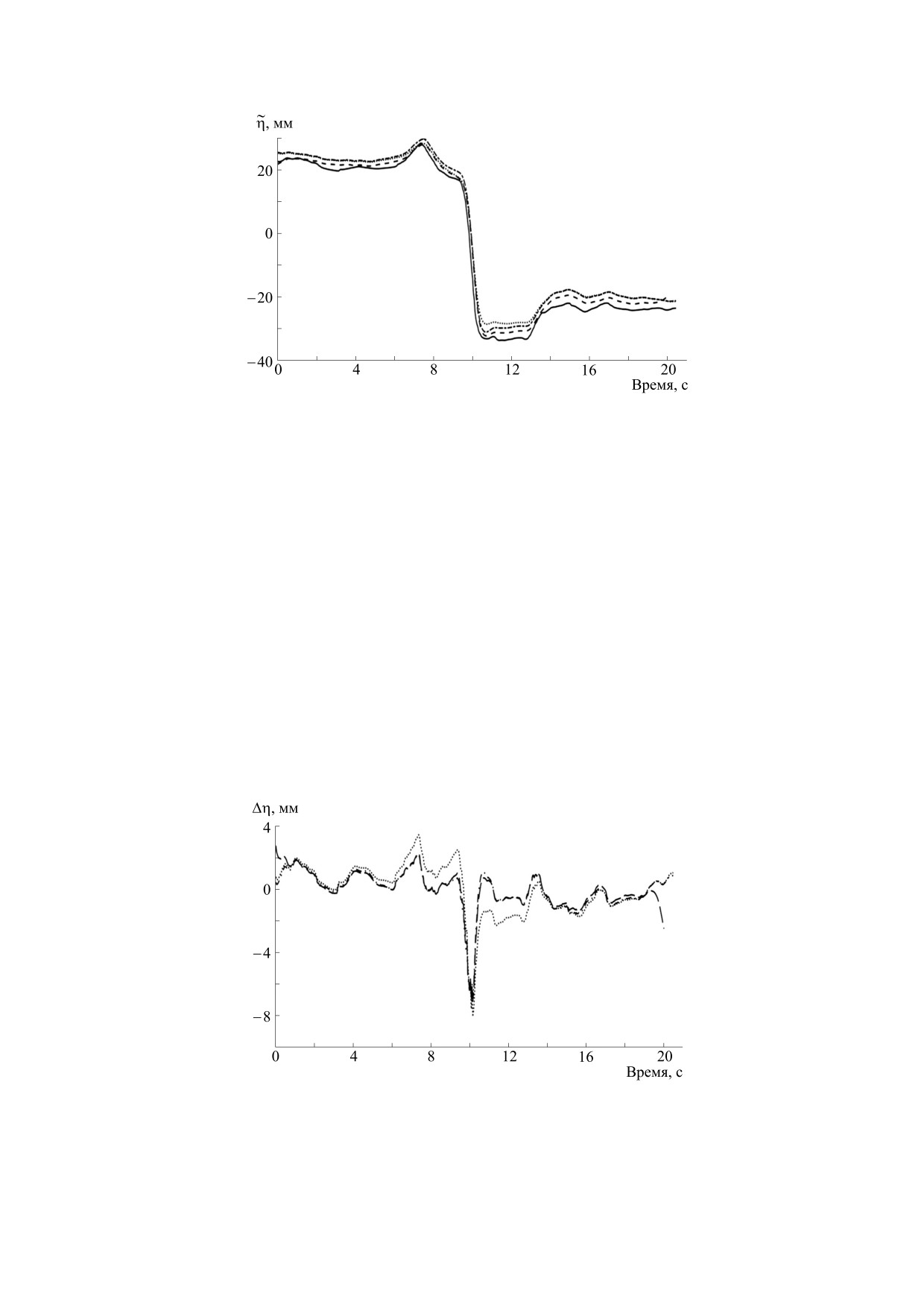
На рис. 3 приведен характерный вид оценок,
ный угол порядка 2-3°, значительно меньший,
полученных с использованием описанных алго-
чем максимально возможное отклонение. Через
ритмов. Продолжительность интервалов [t0, tp] и
15 с человек по команде совершает обратное дви-
жение. Такой цикл каждый обследуемый повто-
[ts, tf] при решении краевой задачи принимали
рял десятикратно. Для синхронизации показаний
равной 5 с. Более наглядное представление о ха-
измерительных комплексов в начале обследова-
рактере ошибок оценивания дает рис. 4, на кото-
ния человек совершал удар стопой по поверхно-
ром приведены разности оценок координат цен-
сти стабилометрической платформы. Вся серия
тра масс и координат маркера системы видеоана-
движений повторялась с закрытыми глазами.
лиза.
Длительность записей для одного обследуемого
В таблице приведены среднеквадратичные
составляла около 10 мин.
значения разностей оценок сагиттальных коор-
БИОФИЗИКА том 66
№ 5
2021
1002
КРУЧИНИН и др.
Рис. 3. Оценки сагиттальных координат центра масс на интервалах активного движения. Сплошной линией
показана сагиттальная координата маркера системы видеоанализа на поясе обследуемого, штриховой - решение
переопределенной краевой задачи, штрихпунктирной - результат применения двух фильтров, пунктирной -
результат применения преобразования Фурье.
динат центра масс и координат маркера системы
грешностям на концах интервала. Этот эффект
видеоанализа, рассчитанные на интервалах спо-
связан с присутствием в решении неустойчивых
койного стояния и интервалах активного движе-
составляющих, но, возможно, может быть подав-
ния. Для спокойного стояния эти значения до-
лен в результате добавления в решение весовых
стигают величин порядка 1 мм. Для участков дви-
коэффициентов и уточнения краевых условий.
жения эти разности возрастают более чем в два
раза. Максимальные значения в отдельных случа-
Следует отметить, что погрешность метода
ях достигали 25% от амплитуды движения, одна-
оценивания, использующего двойную фильтра-
ко такие большие величины могли быть вызваны
цию в прямом и обратном времени, меньше, чем
погрешностями синхронизации измерений, по-
у двух других процедур, однако эта разница может
рожденными нестабильностью временных отсче-
оказаться соизмеримой с погрешностями, по-
тов системы видеоанализа.
рожденными ошибками в задании параметров
Алгоритм решения краевой задачи в предло-
системы (момента инерции и высоты центра масс
женном варианте склонен к повышенным по- над голеностопом).
Рис. 4. Погрешности оценки сагиттальных координат центра масс на интервалах активного движения. Штриховой
линией показана погрешность решения переопределенной краевой задачи, пунктирной
- применения
преобразования Фурье, штрихпунктирной - применения двух фильтров.
БИОФИЗИКА том 66
№ 5
2021
СРАВНИТЕЛЬНЫЙ АНАЛИЗ АЛГОРИТМОВ ОЦЕНКИ ДВИЖЕНИЯ
1003
Средние квадратичные значения разностей оценок координат центра масс и маркера системы видеоанализа
Испытуемые
Разности оценок координат центра масс и маркера системы видеоанализа, мм
Фурье-анализ
Двойная фильтрация
Краевая задача
Спокойное стояние
П1
0.73
0.65
0.80
П2
0.99
0.82
0.93
П3
1.00
0.85
1.15
П4
0.93
0.83
0.93
Общее
0.91
0.79
0.95
Активное движение
П1
1.31
1.14
1.26
П2
1.56
1.45
1.83
П3
2.39
1.70
2.06
П4
2.13
1.51
1.90
Общее
1.85
1.45
1.76
ФИНАНСИРОВАНИЕ РАБОТЫ
7.
Г. В. Кожина, Ю. С. Левик, А. К. Попов и
Б. Н. Сметанин, Физиология человека 43 (5), 70
Публикация подготовлена в рамках реализа-
(2017).
ции Программы создания и развития научного
центра мирового уровня «Сверхзвук» на 2020-
8.
П. А. Кручинин, К. А. Троицкий и Н. В. Холмого-
2025 годы при финансовой поддержке Министер-
рова. Инженерный журнал: наука и инновации 2
ства образования и науки Российской Федерации
(74), (2018). DOI: 10.18698/2308-6033-2018-2-1728
(распоряжение Правительства РФ от 24 октября
9.
Г. В. Кожина, Ю. С. Левик, А. К. Попов и
2020 г. № 2744-p).
Б. Н. Сметанин, Физиология человека 45 (6), 66
(2019).
КОНФЛИКТ ИНТЕРЕСОВ
10.
T. Shimba, J. Biomechanics 17, 53 (1984).
Авторы заявляют об отсутствии конфликта
11.
L. Tesio, P. Civaschi, and L. Tessari, Am. J. Phys. Med.
интересов.
64 (2), 57 (1985).
12.
V. Zatsiorsky and D. King, J. Biomechanics 31, 161
СОБЛЮДЕНИЕ ЭТИЧЕСКИХ СТАНДАРТОВ
(1998).
Все процедуры, выполненные в исследовании
13.
D. Lafond, M. Duarte, and F. Prince, J. Biomechanics
с участием людей, соответствовали этическим
37, 1421 (2004).
стандартам Хельсинкской декларации 1964 г. и ее
14.
M. A. Jaffrey, PhD Thesis (Victoria University, Mel-
последующим изменениям. У всех участников
bourne, Australia, 2008).
было получено информированное добровольное
согласие.
15.
B. J. Benda, P. O. Riley, and D. E. Krebs, IEEE Trans.
Rehabilitation Eng. 2, 3 (1994).
СПИСОК ЛИТЕРАТУРЫ
16.
O. Caron, B. Faure, and Y. Breniere, J. Biomechanics
30, 1169 (1997).
1. D. A. Winter, A. E. Patla, F. Prince, at al., J. Neuro-
physiol. 80 (3), 1211 (1998).
17.
O. Caron, T. Gélat, P. Rougier, and J.-P. Blanchi, J.
2. P. G. Morasso, G. Spada, and R. Capra, Human Mov.
Appl. Biomechanics 16, 234 (2000).
Sci. 18, 759 ((1999).
18.
П. А. Кручинин, Биофизика 64 (6), 1010 (2019).
3. V. M. Zatsiorsky and M. Duarte, Motor Control 4, 185
( 2000).
19. B. C. Гурфинкель, Я. М. Коц и M. Л. Шик, Регуля-
4. E. A. F. Ihlen, N. Skjæret, and B. Vereijken, J. Bio-
ция позы человека (Наука, М., 1965).
mech. 46 (3), 484 (2013).
20. П. А. Кручинин. Рос. журн. биомеханики 18 (2),
5. L. E. Cofre Lizama, M. A. G. M. Pijnappels, and
184 (2014).
G. S. Faber, PLoS One 9 (12), e110757 (2014).
6. B. Gagey, O. Bourdeaux, and P.-M. Gagey, MTP &
21. Ч. Лоусон и Р. Хенсон, Численное решение задач ме-
Rehab. J. 13, 264. (2015).
тодом наименьших квадратов (Наука. М., 1986).
БИОФИЗИКА том 66
№ 5
2021
1004
КРУЧИНИН и др.
A Comparative Analysis of Algorithms for Center of Mass Estimation
Based on Force Plate Data
P.A. Kruchinin, M.A. Podoprikhin, and I.D. Bekerov
Faculty of Mechanics and Mathematics, Lomonosov Moscow State University, Leninskie Gory 1, Moscow, 119992 Russia
Methods for the center of mass horizontal coordinate estimation which are based on the force plate data are
compared. Only the centre of pressure measurements and weight are used. Such problem is mathematically
incorrect and requires regularization. The first method uses initial position and velocity of center of mass, but
also its terminal state estimation. The second method is associated, with the assumption unstable compo-
nents in motion are absence, and uses low-pass filtering. The known algorithms have been modified to solve
the problem under conditions of intense body tilt. The considered algorithms force plate data processing are
modified for subjects making a «test with a stepwise disturbance». At the same time, a system of video cam-
eras was used to determine the coordinates of a marker fixed approximately at the center of mass height. The
performance ability of modified algorithms has been demonstrated. It was noted that the estimation error of
the method using double filtering in forward and reverse time was less than in other algorithms.
Keywords: force plate data, postural sway, center of mass, center of pressure, incorrect problem, regularization
БИОФИЗИКА том 66
№ 5
2021