УДК 620.179.16
МОДЕЛИРОВАНИЕ МАГНИТНЫХ, ЭЛЕКТРИЧЕСКИХ И АКУСТИЧЕСКИХ
ПОЛЕЙ ПРОХОДНОГО ПРЕОБРАЗОВАТЕЛЯ ДЛЯ КОНТРОЛЯ
ЦИЛИНДРИЧЕСКИХ ОБЪЕКТОВ
© 2019 г. К.В. Петров1, *, О.В. Муравьева1, 2, Ю.В. Мышкин1, А.Ф. Башарова1
1Ижевский государственный технический университет имени М.Т. Калашникова,
Россия 426069 Ижевск, ул. Студенческая, 7
2Удмуртский федеральный исследовательский центр УрО РАН,
Россия 426067 Ижевск, ул. Т. Барамзиной, 34
Е-mail: *pmkk@istu.ru
Поступила в редакцию 10.09.2018; после доработки 10.09.2018;
принята к публикации 23.11.2018
Представлены результаты численного моделирования магнитных, электрических и акустических полей проходного
ЭМА-преобразователя продольных волн методом конечных элементов в программной среде COMSOL Multiphysics.
Описаны основные подходы, использованные при моделировании. Исследовано влияние конструктивных зазоров между
ЭМА-преобразователем и объектом контроля на величину и распределение плотности вихревых токов, основной и
мешающий компоненты поля подмагничивания. Проведен анализ влияния рабочей частоты на параметры акустического
поля, даны рекомендации по выбору рабочей частоты преобразователя и добротности зондирующего импульса для фор-
мирования требуемой эпюры смещений по диаметру объекта и оценки чувствительности к поверхностным и внутрен-
ним дефектам, расположенным на различной глубине.
Ключевые слова: моделирование, электромагнитно-акустический преобразователь, эпюра смещений, фокусировка
акустических волн.
DOI:10.1134/S0130308219020027
ВВЕДЕНИЕ
Электромагнитно-акустические (ЭМА) преобразователи широко используются при ультразву-
ковой (УЗ) толщинометрии, структуроскопии и дефектоскопии металлов благодаря бесконтактной
природе возбуждения и приема УЗ волн, о чем свидетельствует большое количество публикаций
последних лет [1—12]. Сравнительно низкая эффективность ЭМА-преобразователей затрудняет
их применение в задачах дефектоскопии, где требуется обнаружение достаточно малых сигналов
на уровне шума. На увеличение их эффективности ориентирован ряд исследований, касающихся
применения мощных источников питания, малошумящих усилителей, оптимизации систем под-
магничивания [13—17].
Использование проходных ЭМА-преобразователей — один из эффективных способов решения
задач неразрушающего контроля изделий цилиндрической формы многократным зеркально-тене-
вым методом [18—22]. Особенно актуальным представляется их использование для контроля объ-
ектов малых диаметров, контроль которых трудно реализуем с помощью контактных ультразвуко-
вых методов, чьи достоверность и воспроизводимость зависят от качества обработки поверхно-
стей контролируемых объектов и их диаметра.
Для повышения эффективности проходных ЭМА-преобразователей требуется поиск оптималь-
ных технических решений как при реализации мощных систем подмагничивания, так и при кон-
струировании преобразователей, адаптированных под широкий диапазон диаметров объектов, что
требует анализа влияния зазора между индуктором, системой подмагничивания и поверхностью
объекта контроля на магнитное поле и поле вихревых токов.
Ввиду того, что проходной ЭМА-преобразователь формирует акустические волны с фокуси-
ровкой по центру, его акустическое поле не соответствует общепринятым представлениям о фор-
мировании диаграмм направленности плоских преобразователей и не может быть рассчитано с
использованием классических подходов к анализу диаграмм направленности. При этом возникает
необходимость оценки влияния факторов, влияющих на формирование зоны фокуса и чувстви-
тельности к дефектам, расположенным на различной глубине.
Одним из наиболее эффективных и прогрессивных подходов к такого рода исследованиям
является численное моделирование методом конечных элементов [23—27], для которого широко
используется программная среда COMSOL Multiphysics — одна из самых современных и много-
функциональных программных платформ для компьютерного моделирования физических задач, в
том числе связанных или «мультифизических» явлений. Данная программная среда дает широкие
Моделирование магнитных, электрических и акустических полей проходного преобразователя...
17
возможности при расчете акустических, электрических и магнитных полей, что позволяет прово-
дить комплексное моделирование физических полей ЭМА-преобразователя.
В статье представлены результаты численного моделирования магнитных, электрических и
акустических полей проходного ЭМА-преобразователя продольных волн в неферромагнитном
объекте контроля методом конечных элементов в программной среде COMSOL Multiphysics. Про-
веден анализ влияния рабочей частоты на параметры акустического поля. Исследовано влияние
зазора на плотность вихревых токов и величину поля подмагничивания.
ПОСТАНОВКА ЗАДАЧИ
Основным механизмом возбуждения акустических волн ЭМА-преобразователем является
электродинамический эффект, определяемый взаимодействием вихревых токов ie длиной dl с
индукцией поля подмагничивания B0 (сила Ампера FA) [28] в пределах тонкого приповерхностного
слоя объекта δ
F
= dl
[
i
⋅B
]
,
(1)
A
e
0
глубина скин-слоя δ определяется
δ=
2 ωµ
µσ,
(2)
0
где μ0 = 4π·10-7 Гн/м; μ — относительная магнитная проницаемость; σ — электропроводность;
ω — круговая частота колебаний.
Возбуждение и распространение преимущественно продольных волн во всех радиальных
направлениях в поперечном сечении цилиндра достигаются благодаря взаимной ориентации
поля подмагничивания B0, имеющего осевое направление в приповерхностной области цилин-
дра (компонента Bz на рис. 1), и вихревых токов ie, текущих по периметру цилиндра.
а
б
B, Т
r, мм
B, Т
1,2
мм
1
1,0
30
2
2
1,0
0,8
20
4
0,8
20
0,6
0,6
0
мм
3
0,4
20
10
0,4
-20
0
0,2
0,2
0
–20
-12
-6
0
6
12 z, мм
мм
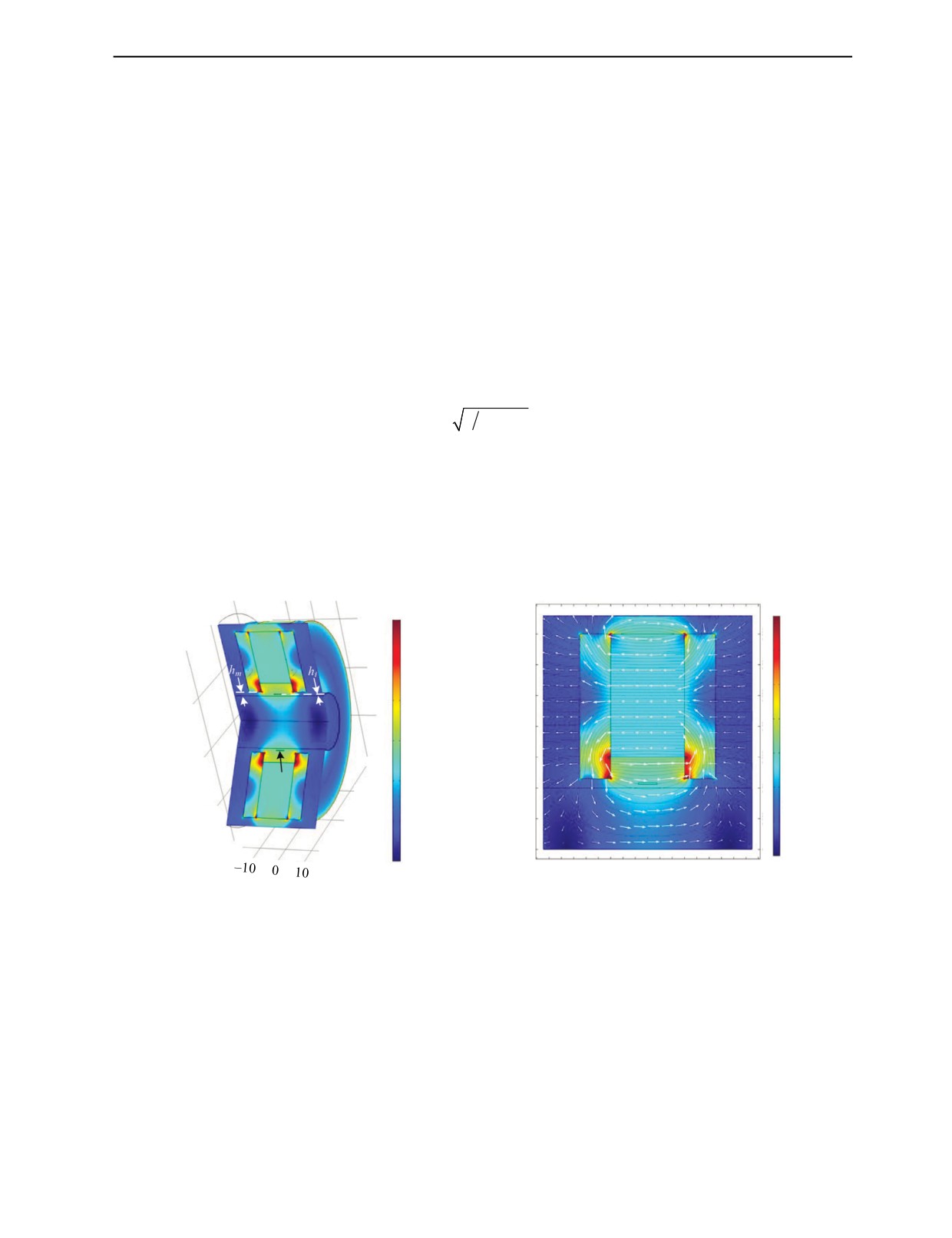
Рис. 1. Распределение (а) и линии (б) магнитного поля системы подмагничивания ЭМА-преобразователя продольных волн.
Многократно переотраженные по диаметру цилиндра импульсы акустической волны принима-
ются тем же преобразователем за счет обратного взаимодействия, при котором высокочастотным
индуктором регистрируются электромагнитные поля, порождаемые колебаниями приповерхност-
ного слоя объекта со скоростью V, в поле подмагничивания с индукцией B0, что приводит к появ-
лению ЭДС индукции εi в катушке [28]
j=σ
[
V⋅B
]
(3)
0
Конструктивно ЭМА-преобразователь продольных волн состоит из постоянного кольцевого
магнита 1 с осевой поляризацией, двух концентраторов магнитного поля 2 в виде ферромагнитных
металлических шайб и проходной цилиндрической катушки индуктивности 3, размещенной в зоне
Дефектоскопия
№ 2
2019
18
К.В. Петров, О.В. Муравьева, Ю.В. Мышкин, А.Ф. Башарова
действия осевой компоненты магнитного поля в пространстве между объектом контроля 4 и маг-
нитом. Между поверхностью объекта и индуктором имеется конструктивный зазор hi, между
поверхностью объекта и постоянным магнитом — зазор hm.
МАГНИТНОЕ ПОЛЕ И ПОЛЕ ВИХРЕВЫХ ТОКОВ
Для оптимизации зазоров при прозвучивании прутков в широком диапазоне диаметров, мини-
мизации массогабаритных размеров, оценки эффективности разрабатываемых проходных ЭМА-
преобразователей проведено численное моделирование магнитного поля системы подмагничива-
ния и поля вихревых токов высокочастотного индуктора методом конечных элементов в программ-
ной среде Comsol Multiphysics (модуль AC/DC, лицензия № 9600055).
Основные магнитные и электрические характеристики объекта контроля и системы подмагни-
чивания, параметры высокочастотного индуктора, используемые при моделировании, приведены
в табл. 1.
Таблица
1
Основные магнитные и электрические параметры объекта контроля, магнитной системы, высокочастотного
индуктора, используемые при моделировании
Значение
Параметр
высокочастотный
постоянный магнит
концентраторы
объект контроля
индуктор
Материал
Неодим-железо-бор
Сталь 20
Монель
Медь
Остаточная намагниченность BR, T
1,2
0
0
0
Относительная магнитная
Согласно кривой
1,04
1,004
0,99994
проницаемость μr
намагничивания
Электропроводность σ, См/м
2×10-2
8,41×106
19,7×106
5.998×107
Наружный диаметр
70
70
20
23
D2, мм
Внутренний диаметр D1, мм
30
23
0
22
Условно
Длина вдоль образующей L, мм
12
5
10
бесконечна
Количество витков
-
-
-
10
Сила тока, А
-
-
-
10
Распределение магнитного поля системы подмагничивания проходного ЭМА-преобразователя
продольных волн в виде двумерной модели, развернутой в пространстве, представлено на рис. 1.
Наибольшая концентрация линий магнитной индукции достигается в области между концентрато-
рами магнитного поля и магнитом у поверхности объекта, где преобладающей компонентой явля-
ется радиальная составляющая магнитной индукции Br. В объекте контроля наблюдаются доста-
точно равномерное распределение магнитного поля по радиусу объекта и преобладание тангенци-
альной (осевой) составляющей магнитной индукции Bz в области размещения высокочастотного
индуктора.
На рис. 2а представлены графики распределения радиальной Br и осевой Bz составляющих
магнитной индукции поля вдоль образующей цилиндрического объекта. Наличие двух компонент
магнитного поля приводит к возможности возникновения наряду с полезной продольной мешаю-
щего типа волны (поперечной). Поэтому соотношение полезной Bz- и мешающей Br-компонент
магнитного поля определяет акустическую помехозащищенность преобразователя (отношение
амплитуды волны требуемого типа к амплитуде волн нежелательного типа [29, 30]), которая может
меняться в зависимости от размера и положения высокочастотного индуктора вдоль образующей
прутка. Исследования указанных параметров позволяют определить ширину намотки высокоча-
стотного индуктора, необходимую для преимущественного излучения и приема продольных волн.
Распределение осевой Bz-составляющей магнитной индукции на поверхности объекта контро-
ля при различных зазорах h иллюстрирует рис. 2б. Увеличение зазора на два порядка (от 0,1 до
10 мм) несущественно уменьшает величину поля подмагничивания на поверхности (от 0,42 до
0,6 Тл), при этом на очень малых зазорах наблюдается концентрация магнитного поля в зоне «кон-
Дефектоскопия
№ 2
2019
Моделирование магнитных, электрических и акустических полей проходного преобразователя...
19
а
б
Bz, Т
B, Т
0,1 мм
1
0,4
1 мм
0,8
Bz
5 мм
0,6
0,3
0,2
0,4
10 мм
Br
0,2
0,1
0
0
-0,2
-0,1
-0,2
-18 -12
-6
0
6
12
18 z, мм
-0,3
-10
0
10 z, мм
Рис. 2. Распределение радиальной Br и осевой Bz-составляющих магнитной индукции поля по образующей прутка при
h = 5 мм (а), распределение осевой Bz-составляющей магнитной индукции на поверхности объекта контроля при
различных зазорах h (б).
центраторы—магнит». При h = 1 мм происходит наиболее равномерное распределение z-компоненты
магнитного поля в зоне размещения высокочастотного индуктора, а при больших h — плавное
уменьшение поля при удалении от центра намагничивающей системы.
На рис. 3а показано распределение плотности вихревых токов ie высокочастотного индуктора
на частоте 3 МГц в виде двумерной модели, развернутой в пространстве. Рис. 3б иллюстрирует
влияние зазора h между индуктором и объектом контроля под индуктором на плотность вихревых
токов на поверхности цилиндра. Увеличение зазора на два порядка (от 0,1 до 10 мм) уменьшает
плотность вихревого тока почти в 6 раз (от 8,2×108 до 1,4×108 А/м2) и ведет к появлению большей
неравномерности в распределении вихревых токов по образующей цилиндра, что может привести
к формированию мешающих типов волн даже при расположении индуктора вне мешающей ком-
поненты магнитного поля.
а
б
в
0,1 мм
ie, ×108 А/м2
8,16
4,5
6,8
4
4,3
5,44
3,5
мм
1 мм
3,44
4,08
3
20
5 мм
2,72
2,5
2,58
10 мм
1,36
2
0
0
1,5
мм
1,72
-15 -7,5
0
7,5
15 z, мм
1
-20
20
0,86
0,5
0
0
50
100
150 r, мм
-20
мм
Рис. 3. Распределение вихревых токов в объеме (а) и плотности вихревых токов по образующей объекта контроля на
поверхности при различных зазорах h (б), зависимость плотности вихревых токов в радиальном направлении объекта (в).
Суммарное действие зазора, обусловленное ослаблением магнитного поля и поля вихревых
токов, показывает уменьшение силы Ампера FA в 8,5 раза при увеличении зазора от 0,1 до 10 мм.
В режиме двойного ЭМА-преобразования указанное ослабление составит 37 дБ.
Результаты расчета характеризуют экспоненциальную зависимость амплитуды вихревых токов
от глубины их проникновения под центром катушки индуктивности в радиальном направлении
(рис. 3в). Глубина скин-слоя в неферромагнитном материале (медно-никелевый сплав монель) со-
ставила δ = 70 мкм, что соответствует результатам аналитического расчета по формуле (3).
Результаты моделирования магнитного поля и поля вихревых токов проходного ЭМА-
преобразователя в неферромагнитном электропроводящем объекте позволяют оценить механизм
взаимодействия Лоренца и поле смещений при излучении [29]. Расчеты показывают, что при токе
Дефектоскопия
№ 2
2019
20
К.В. Петров, О.В. Муравьева, Ю.В. Мышкин, А.Ф. Башарова
в индукторе i = 10 А на частоте 3 МГц обеспечивается возникновение в приповерхностном слое
объекта силы Ампера с объемной плотностью 2,6×108 Н/м3.
В предположении, что объемные силы в скин-слое экспоненциально затухают по радиусу, со-
гласно принципу Сен-Венана объемные напряжения можно заменить средними напряжениями в
скин-слое с поверхностной плотностью FAS [31]
F
=F
⋅ δ⋅(e-1)
e ≈F
⋅0,632δ ,
(4)
AS
AV
AV
где e — основание натурального логарифма.
Расчет по формуле (4) для поверхностной плотности сил дает значение FAS = 11,5 кПа.
АКУСТИЧЕСКОЕ ПОЛЕ
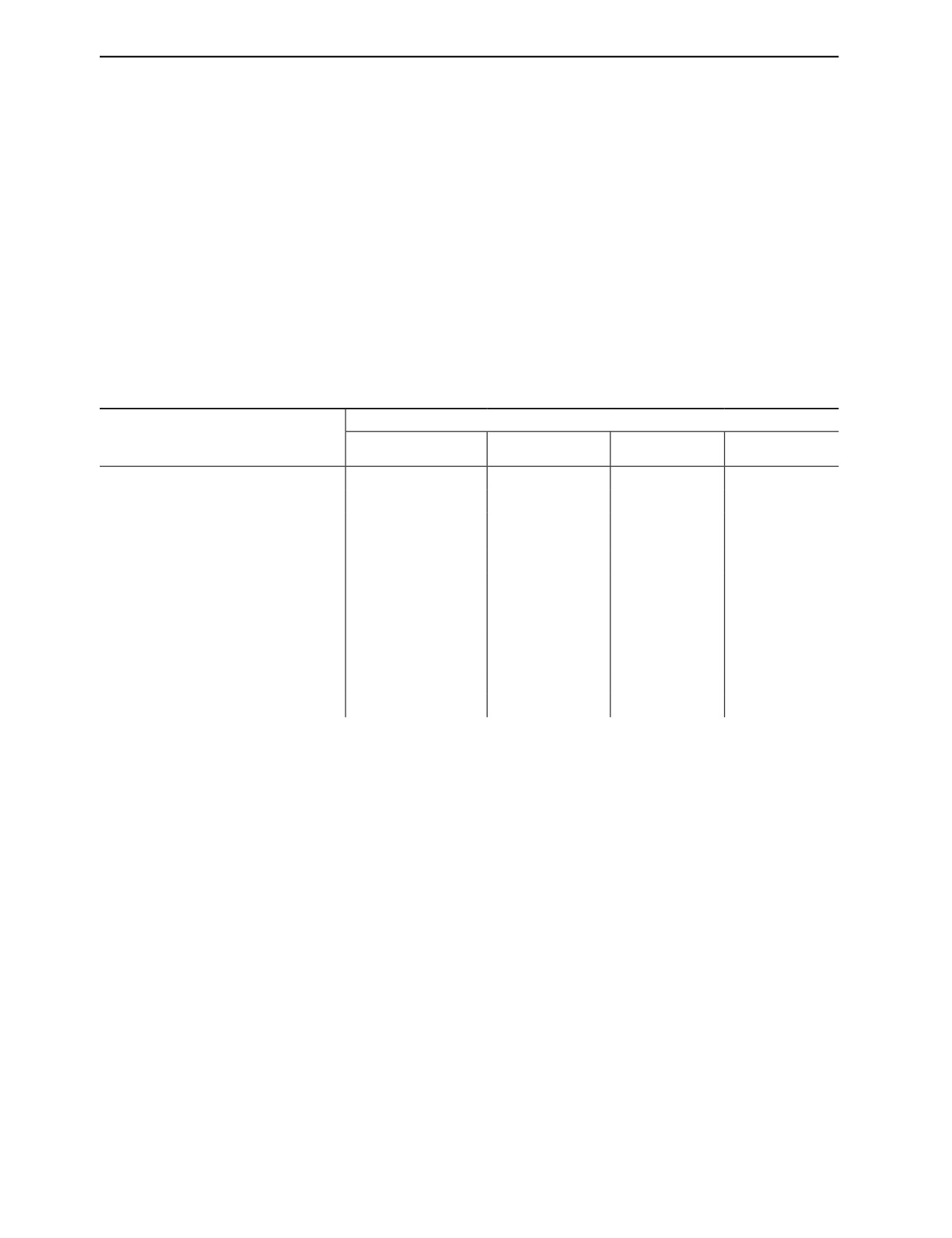
Модель процесса распространения акустических продольных L-волн по сечению цилиндра в
трехмерной постановке представлена на рис. 4а. Полагается, что возбуждение продольных волн
происходит за счет приложения зондирующего импульса нормальных смещений U(t), равномерно
распределенных по периметру прутка. Вид импульса смещений представлен на рис. 4б и задается
формулой
t
U t)=
U
sin(ωt)e-β
,
(5)
0
где U0 — начальное смещение; t — время; β — коэффициент затухания; ω = 2πf
— круговая ча-
стота колебаний.
а
б
мм
2,3
20
1,87
15
1,44
R
1,01
10
U(t)
0,58
5
0,15
0
-0,28
x
0
5
0
-0,71
y
10
5
15
10
15
z
20
0
0,1 0,2 0,3
0,4 0,5 0,6 0,7 0,8
мм
t, мкс
Рис. 4. Трехмерная модель (а), форма импульса смещений U(t) (б).
Величина смещений U0 может быть рассчитана с использованием закона Гука для всесторон-
∆V
него однородного сжатия, согласно которому относительное изменение объема
тела прямо
V
пропорционально внешнему давлению
∆V
F
=
K,
(6)
AS
V
где K — модуль всестороннего сжатия (объемный модуль упругости)
E
K=
,
(7)
3(1
− ν)
где ν — коэффициент Пуассона.
Расчет радиального смещения под воздействием сил Ампера с плотностью FAS дает значение
2,3∙10-10 м, которое заложено в расчет в качестве величины начального смещения U0.
Конечно-элементная модель процесса распространения акустических волн базируется на ре-
шении дифференциальных волновых уравнений движения упругой среды и реализована в про-
граммной среде COMSOL Multiphysics (модуль Structural Mechanics). Основные параметры объ-
екта контроля, используемые при моделировании акустического поля, представлены в табл. 2.
Дефектоскопия
№ 2
2019
Моделирование магнитных, электрических и акустических полей проходного преобразователя...
21
Таблица
2
Основные параметры задачи, используемые при моделировании
Параметры задачи
Значение
Материал объекта контроля
Монель
Плотность материала объекта контроля, кг/м3
8800
Модуль Юнга материала объекта контроля, Па
1,8×1011
Коэффициент Пуассона материала объекта контроля
0,33
Амплитуда зондирующего импульса нормальных смещений U0, м
2,3×10-10
Частота зондирующего импульса f, МГц
1, 3, 5
Коэффициент затухания зондирующего импульса β, 1/мкс
7
В качестве начальных условий использованы функции смещений по осям x и y, описываемые в
явном виде формулами:
x
y
U
=U t)⋅
,
U
=U t)⋅
,
(8)
0x
0y
R
R
где t — время; U0x и U0y — смещения по осям x и y; x, y — координаты декартовой системы;
R — радиус цилиндра.
Граничные условия в задаче заданы через функцию «Prescribed Displacement». Поскольку зон-
дирующий импульс посылается единожды за весь период моделирования, для корректного реше-
ния задачи граничные условия необходимо задавать с помощью оператора «if», разделяющего на-
чальный интервал времени t = 3T0 (T0 — период зондирующего импульса), когда на поверхности
цилиндра формируется зондирующий импульс, и последующий, когда данная граница является
свободной при падении, отражении и трансформации волн (функции COMSOL Multiphysics, опи-
сывающие свободную границу «solid.disp.ux» и «solid.disp.uy»).
Корректность расчетов повышается, если при построении сетки конечных элементов макси-
мальный размер элемента Δx (шаг сетки конечных элементов) не превышает 1/6 от длины волны
∆x < λ
6
=C
T
6,
(9)
l
0
где Cl — скорость продольной УЗ волны в материале.
При этом временной шаг ∆t при моделировании определяется критерием Куранта — Фридрих-
са — Леви [32], выражающим необходимое условие устойчивости явного численного решения и
задаваемым формулой
C
∆t ∆x <
0,1.
(10)
l
При значениях скорости продольной волны Cl = 5850 м/с, частоты f = 3 МГц и радиуса цилин-
дра R = 10 мм количество конечных элементов составляет ≈ 70 000, шаг по времени ∆t = 3,3 нс,
пространственный шаг конечных элементов ∆x = 0,2 мм.
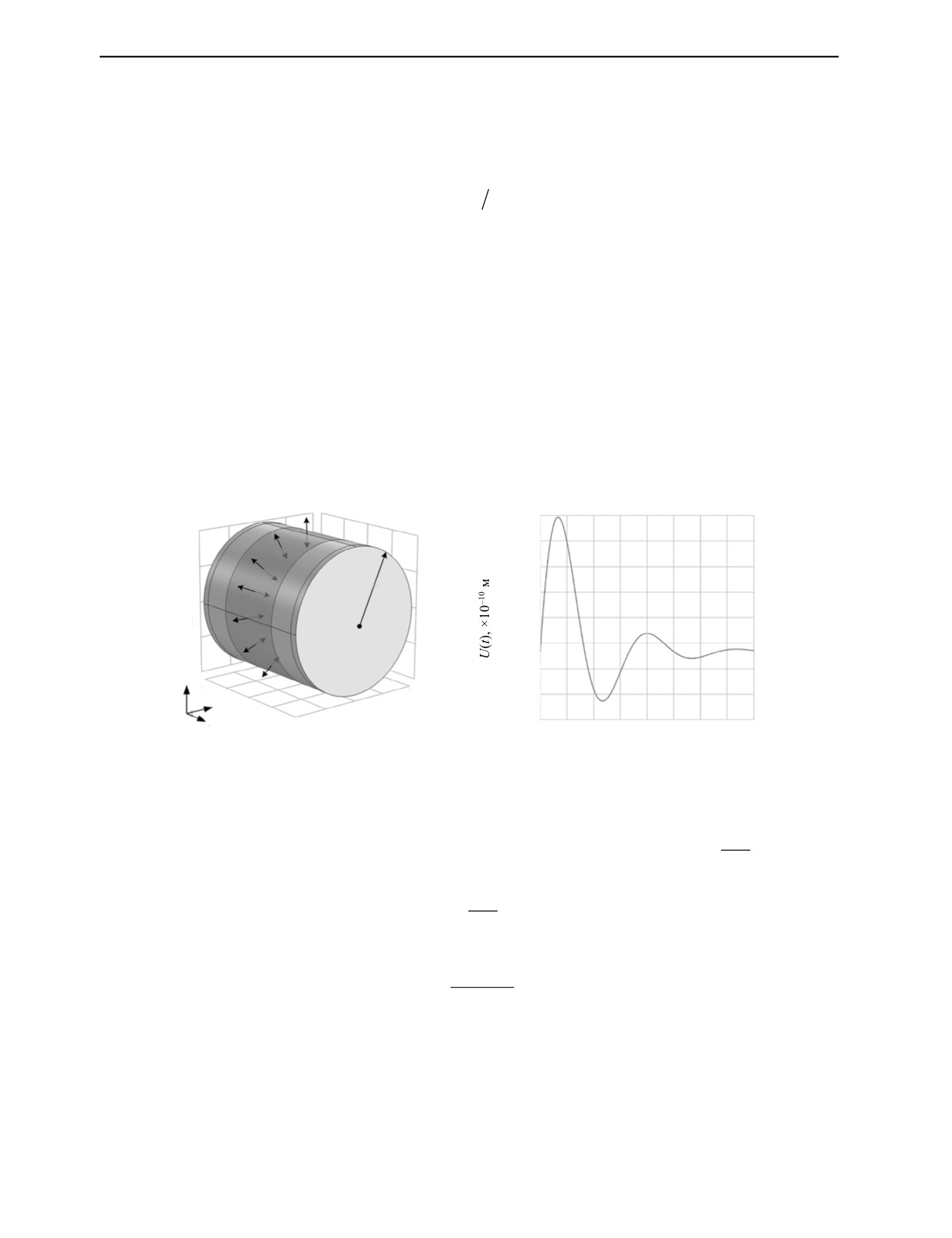
Результат моделирования акустического поля иллюстрирует рис. 5, представляющий фронт акусти-
ческой волны в пространстве и плоскости поперечного сечения образца в различные моменты времени.
а
б
мм
×10-10 м
×10-10 м
20
1,98
3,06
1,65
2,55
15
2,04
1,32
1,53
10
1,02
0,99
0,51
5
0,66
0,5 мкс
1,0 мкс
1,5 мкс
0
0
0,33
x
0
5
5
10
y
10
15
15
z
20
мм
Рис. 5. Результаты моделирования волнового фронта продольной волны:
а — в пространстве в начальный момент времени; б — в поперечном сечении цилиндра в различные моменты времени.
Дефектоскопия
№ 2
2019
22
К.В. Петров, О.В. Муравьева, Ю.В. Мышкин, А.Ф. Башарова
В радиальной плоскости сечения фронт волны является сходящимся сферическим, при этом
в осевой плоскости сечения его форма близка по форме к фронту плоской волны. Таким образом,
проходной ЭМА-преобразователь формирует в цилиндре акустическую волну, ослабляющуюся по
закону цилиндрического фронта.
Эпюры смещений в продольной волне по диаметру круглого цилиндра при различных частотах
зондирующего импульса представлены на рис. 6а. При приближении к центральной области
цилиндра амплитуда смещений возрастает, что объясняется эффектом фокусировки при формиро-
вании сходящегося волнового фронта. При этом в центре цилиндра формируются нулевые смеще-
ния, обусловленные расфазировкой двух импульсов, распространяющихся в противоположных
направлениях. Локальное увеличение амплитуды смещений на поверхности объясняется сложени-
ем смещений в падающей волне и волне, отраженной от свободной поверхности с фазовым сдви-
гом на π, распространяющихся в противоположных направлениях.
а
б
17,5
1 МГц
Kf
Sf , мм2
3 МГц
13,7
18
Umax
5 МГц
7
9,9
14
Umin
6
6,1
6 дБ
10
2,3
5
6
4
2
Sф
3
1
3
f, МГц
5
-8
-4
0
4
r, мм
Рис. 6. Эпюры смещений в поперечном сечении цилиндра (а); зависимость коэффициента фокусировки Kf от частоты f (б).
Введем понятие эффективности фокусировки, определяемой коэффициентом фокусировки Kf
и размером фокусного пятна Sf. За коэффициент фокусировки принято отношение максимальной
амплитуды смещений в зоне фокуса Umax к минимальной амплитуде Umin, эквивалентной ампли-
туде начальных смещений U0 (см. рис. 6а)
U
max
K
=
(11)
f
Umin
За размер фокусного пятна принята площадь кольца Sf, соответствующего уменьшению ампли-
туды смещений на 6 дБ (в 2 раза) относительно максимального значения. Влияние рабочей частоты
на параметры фокусировки иллюстрирует рис. 6б.
Коэффициент фокусировки определяется частотой, диаметром объекта и длительностью зон-
дирующего импульса. Исследования показывают, что рост частоты приводит к формированию
более неравномерной эпюры смещений с более выраженным характером фокусировки. На низ-
кой частоте (1 МГц) Kf = 3,5 при размере фокусного пятна Sf = 19 мм2, на высокой частоте (5 МГц)
Kf = 7,7; Sf = 0,8 мм2. На высоких рабочих частотах (3-5 МГц) обеспечивается наибольшая чув-
ствительность к дефектам, расположенным в центральной части прутка, на низких (1-2 МГц)
— более равномерная чувствительность к дефектам, расположенным на различной глубине. Ко-
эффициент фокусировки увеличивается с ростом радиуса цилиндра R и увеличением добротно-
сти зондирующего импульса (уменьшением коэффициента β). Так, увеличение R в 5 раз (от 5 до
25 мм) приводит к росту Kf почти в два раза (от 4,3 до 8,7), увеличение добротности зондирую-
щего импульса в 3 раза — к росту Kf в 1,7 раза (от 6,4 до 10,8).
ВЫВОДЫ
Результаты численного моделирования процессов формирования магнитных и электрических
полей проходного ЭМА-преобразователя позволяют оптимизировать параметры системы подмаг-
ничивания и высокочастотного индуктора исходя из:
Дефектоскопия
№ 2
2019
Моделирование магнитных, электрических и акустических полей проходного преобразователя...
23
допустимого конструктивного зазора между преобразователем и объектом контроля;
достижения максимального значения требуемой компоненты и минимизации мешающей ком-
поненты магнитного поля;
необходимого распределения требуемой компоненты магнитного поля вдоль образующей и
огибающей прутка;
минимизации массогабаритных размеров магнитопровода.
Результаты численного моделирования процессов распространения акустических волн, излу-
чаемых проходным ЭМА-преобразователем по радиальным направлениям сечения прутка, позво-
ляют оптимизировать рабочую частоту и добротность зондирующего импульса для формирования
требуемой эпюры смещений по диаметру объекта и оценки чувствительности к поверхностным и
внутренним дефектам, расположенным на различной глубине.
Представленные модели и исследованные закономерности формирования магнитных, элек-
трических и акустических полей проходного ЭМА-преобразователя могут быть использованы при
разработке методов и средств неразрушающего контроля пруткового проката зеркально-теневым
ЭМА-методом для повышения эффективности ЭМА-преобразователя; оптимизации количества
возможных типоразмеров преобразователей для широкого диапазона контролируемых диаметров
прутков; выбора оптимальной рабочей частоты проходных ЭМА-преобразователей; разработки
критериев браковки.
Работа выполнена в рамках проекта № 3.5705.2017/ВУ по государственному заданию Мини-
стерства образования и науки РФ ФБГОУ ВО «ИжГТУ им. М.Т. Калашникова» на 2017—2019 гг.
по разделу «Организация проведения научных исследований».
СПИСОК ЛИТЕРАТУРЫ
1. Hirao M., Ogi H. Electromagnetic Acoustic Transducers: Noncontacting Ultrasonic Measurements
Using EMATs. Tokyo: Springer Japan, 2017. 380 p.
2. Муравьев В.В., Волкова Л.В., Платунов А.В., Куликов В.А. Электромагнитно-акустический метод
исследования напряженно-деформированного состояния рельсов // Дефектоскопия.
2016.
№ 7.
С. 12—20.
3. Муравьев В.В., Тапков К.А. Оценка напряженно-деформированного состояния рельсов при изго-
товлении // Приборы и методы измерений. 2017. Т. 8. № 3. С. 263—270.
4. Муравьев В.В., Муравьева О.В., Волкова Л.В. Влияние анизотропии механических свойств тонко-
листового стального проката на информативные параметры волн Лэмба // Сталь. 2016. № 10. С. 75—79.
5. Муравьев В.В., Злобин Д.В., Платунов А.В. Прибор для исследований акустоупругих характери-
6. Pei C., Zhao S., Liu T., Chen Z. A new method for plastic strain measurement with Rayleigh wave
polarization // Ultrasonics. 2018. V. 88. P. 168—173.
7. Медведев Д.Д., Смирнов А.Ю. Применение электромагнитно-акустических преобразователей для
ультразвукового контроля полуфабрикатов из алюминиевых сплавов // В мире неразрушающего кон-
троля. 2017. Т. 20. № 4. С. 11—13.
8. Баширов М.Г., Хуснутдинова И.Г., Хуснутдинова Л.Г., Усманов Д.Р. Электромагнитно-
акустический метод оценки технического состояния энергетического оборудования // Промышленная
энергетика. 2016. № 12. С. 8—13.
9. Tallafuss P.J., Rosochowski A., Campbell S., Minguez X. Implementing an online bond quality inspection
system for cold roll bonded Al/Al-Sn/Al/steel strips using guided wave EMATs // Insight-Non-Destructive
Testing and Condition Monitoring. 2018. V. 60. No. 3. P. 145—154.
10. Xie S., Tian M., Xiao P., Pei C., Chen Z., Takagi T. A hybrid nondestructive testing method of pulsed
eddy current testing and electromagnetic acoustic transducer techniques for simultaneous surface and
11. Liu T., Pei C., Cheng X., Zhou H., Xiao P., Chen Z. Adhesive debonding inspection with a small EMAT
in resonant mode // NDT & E International. 2018. V. 98. P. 110—116.
12. Isla J., Cegla F. EMAT phased array: a feasibility study of surface crack detection // Ultrasonics. 2017.
V. 78. P. 1—9.
13. Сучков Г.М., Мигущенко Р.П., Плеснецов С.Ю. Мощные источники питания высокочастотных
преобразователей электромагнитного типа для измерений, контроля и диагностики // Дефектоскопия.
2017. № 12. С. 35—39.
14. Стрижак В.А., Пряхин А.В., Хасанов Р.Р., Ефремов А.Б. Аппаратно-программный комплекс
15. Толипов Х.Б. Возможности повышения эффективности бесконтактного излучателя акустических
волн // Дефектоскопия. 2017. № 4. С. 71—74.
Дефектоскопия
№ 2
2019
24
К.В. Петров, О.В. Муравьева, Ю.В. Мышкин, А.Ф. Башарова
16. Злобин Д.В., Волкова Л.В. Влияние динамического подмагничивания на эффективность электро-
магнитно-акустического преобразования при волноводном контроле прутков // Приборы и методы
измерений. 2017. Т. 8. № 3. С. 236—245.
17. Muraveva O.V., Muravev V.V., Myshkin Yu.V. Laws of formation of grating lobes in the acoustic field
of electromagnetic-acoustic transducers as a linear array of unidirectional conductors // NDT & E International.
2018. V. 93. P. 40—56.
18. Муравьев В.В., Муравьева О.В., Петров К.В. Связь механических свойств пруткового проката из
стали 40Х со скоростью объемных и рэлеевских волн // Дефектоскопия. 2017. №. 8. С. 20—28.
19. Муравьева О.В., Зорин В.А. Метод многократной тени при контроле цилиндрических объектов
с использованием рэлеевских волн // Дефектоскопия. 2017. № 5. С. 3—9.
20. Муравьев В.В., Муравьева О.В., Кокорина Е.Н. Акустическая структуроскопия и дефектоскопия
прутков из стали 60С2А при производстве пружин с наноразмерной структурой // Изв. высш. уч. заве-
дений. Черная металлургия. 2013. Т. 56. № 4. С. 66—70.
21. Муравьев В.В., Муравьева О.В., Стрижак В.А., Пряхин А.В., Фокеева Е.Н. Анализ сравнитель-
ной достоверности акустических методов контроля пруткового проката из рессорно-пружинных сталей
// Дефектоскопия. 2014. № 8. С. 3—12.
22. Муравьева О.В., Соков М.Ю. Влияние глубины залегания дефекта на параметры многократно-
теневого электромагнитно-акустического метода контроля прутков
// Вестник ИжГТУ им.
М.Т. Калашникова. 2016. Т. 19. № 3. С. 46—50.
23. Наседкин А.В., Наседкина А.А., Рыбянец А.Н. Моделирование и конечно-элементный анализ
преобразователя из пористой пьезокерамики в форме диска с плосковогнутой поверхностью //
Дефектоскопия. 2018. № 6. С. 23—31.
24. Муравьева О.В., Муравьев В.В., Кокорина Е.Н., Стерхов В.Д., Малютин Д.В. Оптимизация
систем подмагничивания проходных электромагнитно-акустических преобразователей объемных волн
для неразрушающего контроля пруткового проката // Датчики и системы. 2013. № 2. С. 2—9.
25. Augustyniak M., Usarek Z. Finite Element Method Applied in Electromagnetic NDTE: A Review //
Journal of Nondestructive Evaluation. 2016. V. 35. No. 3. P. 39.
26. Wang S., Li Z., Li P., Liu X., Zhai G. Numerical and experimental evaluation of the receiving performance
of meander-line coil EMATs // Nondestructive Testing and Evaluation. 2014. V. 29. No. 4. P. 269—282.
27. Xie Y., Yin W., Liu Z., Peyton A. Simulation of ultrasonic and EMAT arrays using FEM and FDTD //
Ultrasonics. 2016. V. 66. P. 154—165.
28. Буденков Г.А., Коробейникова О.В. Влияние химического состава и температуры металлов на
эффективность электромагнитно-акустического преобразования // Дефектоскопия.
2009.
№ 4.
С. 41—49.
29. Петров К.В., Соков М.Ю., Муравьева О.В. Влияние конструктивных особенностей проходного
электромагнитно-акустического преобразователя на результаты контроля цилиндрических объектов //
Вестник ИжГТУ им. М.Т. Калашникова. 2018. Т. 21. № 2. С. 135—146.
30. Буденков Г.А., Недзвецкая О.В. Динамические задачи теории упругости в приложении к про-
блемам акустического контроля и диагностики. М.: Изд-во «Физматлит», 2004. 136 с.
31. Муравьева О.В., Леньков С.В., Мурашов С.А. Крутильные волны, возбуждаемые электромагнит-
но-акустическими преобразователями, при акустическом волноводном контроле трубопроводов //
Акустический журнал. 2016. Т. 62. № 1. С. 117—124.
32. Вержбицкий, В.М. Численные методы математической физики / Учеб. пособие. М.: Директ-
Медиа, 2013. 212 с.
Дефектоскопия
№ 2
2019