Радиационные методы
УДК 620.179.15
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ЦИФРОВОЙ ЛИНЕЙНОЙ ТОМОГРАФИИ
© 2019 г. С.П. Осипов1,*, Е.Ю. Усачёв2, С.В. Чахлов1,**, С.А. Щетинкин2, А.А. Манушкин2,
О.С. Осипов3, Н.А. Сергеева1
1Национальный исследовательский Томский политехнический университет,
Россия 634028 Томск, пр-т Ленина, 30
2МИРЭА — Российский технологический университет, Россия 119454 Москва, пр-т Вернадского, 78
3Сольвейг Мультимедиа, Россия 634055 Томск, пр-т Развития, 3
E-mail: *osip1809@rambler.ru; **chakhlov@tpu.ru
Поступила в редакцию 21.01.2019; после доработки 25.02.2019;
принята к публикации 01.03.2019
Разработана математическая модель цифровой линейной томографии, которая учитывает геометрические параме-
тры схемы контроля, глубину слоя интереса, максимальную энергию рентгеновского излучения, конструкцию цифрово-
го детектора, разрядность аналого-цифрового преобразователя. Математическая модель реализована в системе матема-
тических вычислений MathCad. Приведены результаты вычислительного эксперимента, подтверждающие возможность
получения изображения слоя с существенно уменьшенным влиянием изображений других слоев.
Ключевые слова: рентгеновское излучение, цифровая радиография, цифровая реализация линейной томографии,
изображение слоя, наложение теней фрагментов.
DOI: 10.1134/S0130308219050063
ВВЕДЕНИЕ
В 1895 г. произошло событие, значение которого невозможно преуменьшить и в настоящее
время [1—3]. С открытием Вильгельмом Конрадом Рентгеном таинственных лучей, скромно
названных им X-лучами, человечество получило средство изучения внутренней структуры объ-
ектов контроля. Метод рентгенографии (радиографии) основан на относительной прозрачности
испытуемого объекта для рентгеновских и гамма-лучей. Всем реализациям радиографии присуща
существенная особенность [4, 5], связанная с наложением теней фрагментов объекта контроля
(ОК). Она не позволяет детально и корректно проанализировать изображение интересующего
потребителя фрагмента и локализовать его местоположение в объеме ОК по глубине. Здесь под
локализацией по глубине понимается локализация в направлении распространения лучей.
Разумеется, наличие такой особенности (по сути, огромного недостатка) подвигло многих иссле-
дователей приложить максимум усилий для ее компенсации. Исследования групп ученых, возглав-
ляемых Маером (1914 г.) и Бокажем (1921 г.), привели к появлению первых систем томографии
[5—7]. Соответствующий метод имеет несколько считающихся эквивалентными названий: линей-
ная томография, классическая томография, ламинография, аналоговая реконструктивная томогра-
фия и т.п. В упомянутом методе преимущественно визуализируется слой, расположенный на
определенной глубине от фронтальной поверхности ОК. Преимущественная визуализация слоя
реализуется за счет специальным образом организованного совместного перемещения источника
и регистратора (рентгеновской пленки) с сохранением ориентации на зону интереса. На первых
этапах развития метода линейной томографии источник и регистратор рентгеновского излучения
перемещались по прямой линии. В линейной томографии изображение зоны интереса в меньшей
степени затенялось изображениями других фрагментов ОК. Коммерческое использование систем
линейной томографии продолжалось вплоть до появления и бурного развития эффективных
систем рентгеновской вычислительной томографии — компьютерной томографии (КТ) [7, 8].
Самым узким местом линейной томографии до 90-х годов XX века являлось использование в каче-
стве регистраторов излучения рентгеновских пленок с присущими им недостатками. Появление на
рынке научного приборостроения усовершенствованных излучателей и цифровых регистраторов
рентгеновского излучения привело к возобновлению интереса к линейной томографии и превра-
щению ее в цифровую линейную томографию (ЦЛТ). Усиление интереса к реализациям ЦЛТ
подогревается усилением интереса потребителей к разработке соответствующей аппаратуры.
Спрос обусловлен двумя важнейшими факторами, связанными с эксплуатацией систем КТ. Первый
связан с доступностью пространства вокруг ОК. Наиболее эффективно функционирование систем
КТ в условиях многостороннего доступа, то есть объект просвечивается под ракурсами от 0 до
Математическая модель цифровой линейной томографии
47
180°. Второй объединяет запрос потребителей к разработчикам КТ и их ответ на этот запрос,
структуру всего ли объекта контроля необходимо проанализировать? Многих исследователей вну-
тренней структуры ОК интересует некая локальная область объекта. В этой ситуации нецелесоо-
бразно исследовать весь объем ОК. Дополнительными факторами, подталкивающими развитие
ЦЛТ, являются уже отмеченные революционные изменения в детекторах рентгеновского излуче-
ния, приведшие к появлению линейных и плоских цифровых детекторов, позволяющих раздельно
получать цифровые радиографические изображения (проекции). Существенные изменения прои-
зошли в робототехнике, что привело к созданию роботизированных комплексов, позволяющих
осуществлять высокоточное согласованное перемещение источников излучения и систем детекти-
рования. Совершенствование методов совместной обработки указанной совокупности изображе-
ний и успехи в производстве высокопроизводительных вычислительных систем привели к разви-
тию метода цифрового томосинтеза (ЦТC), который является высшим этапом развития линейной
томографии [9, 10].
В настоящее время наблюдается всплеск интереса к реализациям ЦЛТ и ЦТC [11—18].
Очевидно, качество контроля с помощью систем линейной томографии зависит от большого
количества параметров, исследовать влияние которых на качество контроля экспериментальным
путем не представляется возможным. Особую роль при проектировании систем ЦЛТ приобретают
математическое и имитационное моделирование [19—21]. Необходимость в построении математи-
ческой модели формирования итоговых изображений в ЦЛТ или проекций в ЦТС, учитывающей
основные параметры проектируемых систем, не вызывает никаких сомнений. Ниже рассмотрим
базовые принципы и этапы ее построения.
1. МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ЦИФРОВОЙ ЛИНЕЙНОЙ ТОМОГРАФИИ
Методы ЦЛТ являются разновидностью сканирующей цифровой радиографии со специальной
организацией схемы сканирования. Существует принципиальное отличие между ЦЛТ и линейной
томографией. В линейной томографии в регистраторе (рентгеновской пленке) поглощенная энер-
гия неделимо накапливается за все время формирования изображения слоя [22] — «изображения
зоны интереса». Здесь словосочетание «изображение зоны интереса» намеренно заключено в
кавычки, так как на изображение слоя, пусть и в меньшей степени, чем в рентгенографии, накла-
дываются тени всех других слоев. В ЦЛТ нет необходимости копить энергию за весь период ска-
нирования, и конечное цифровое изображение формируется из набора последовательных цифро-
вых радиографических изображений. Сканирование может быть непрерывным или дискретным. В
той и другой версии промежуточные изображения формируются за время экспозиции ∆t.
Непрерывная версия ЦЛТ наиболее адекватна линейной томографии. Из вышесказанного следует,
что математическая модель ЦЛТ базируется на математической модели формирования промежу-
точных цифровых радиографических изображений с трансформацией их в конечное изображение.
Модель указанной трансформации определяется геометрической схемой сканирования — взаим-
ного согласованного перемещения источника и цифрового регистратора рентгеновского излучения
относительно зоны интереса в ОК.
Приведем описание указанной геометрической схемы.
1.1. Геометрическая схема формирования промежуточных изображений в цифровой линей-
ной томографии
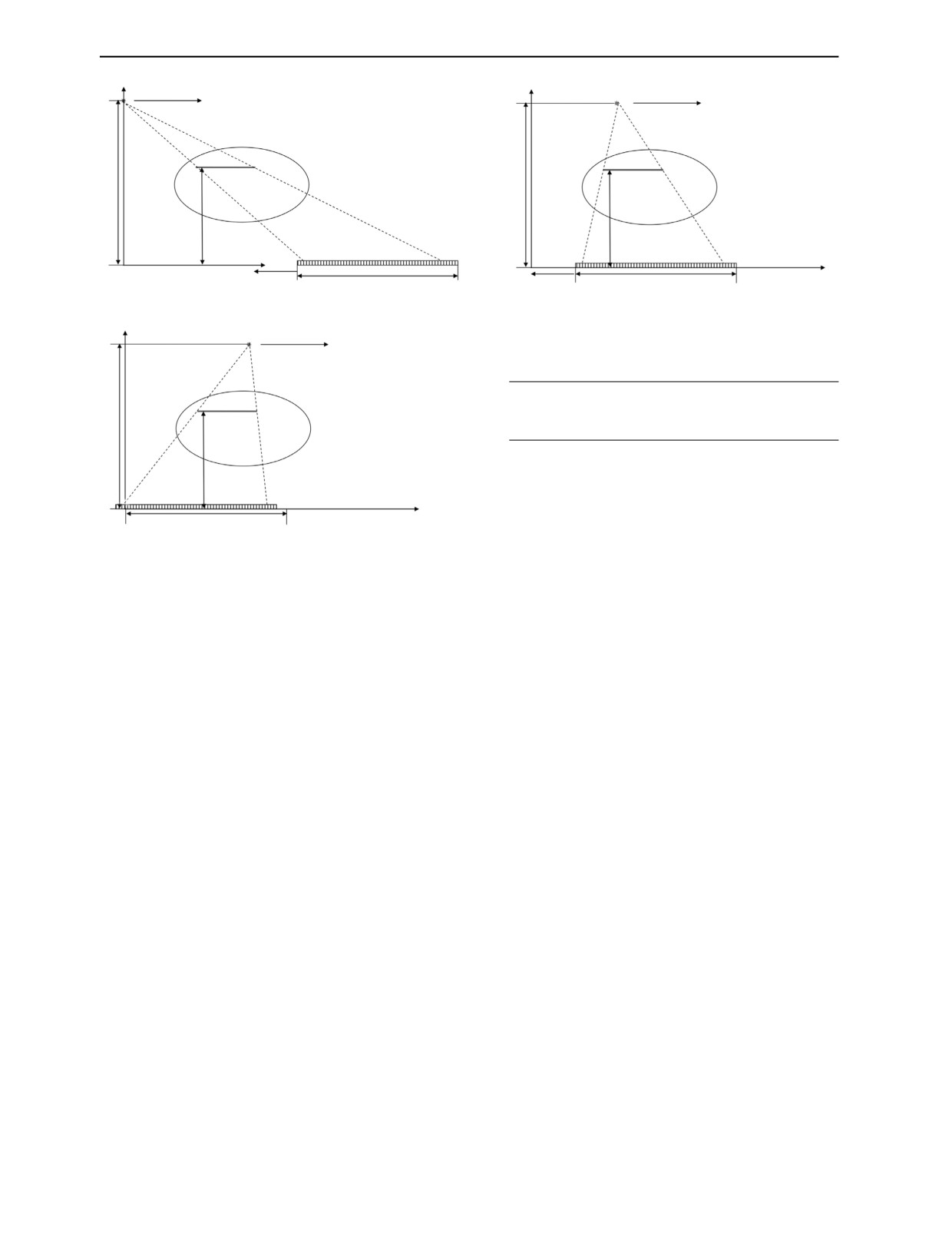
Для иллюстрации на рис. 1 приведена геометрическая схема формирования промежуточных
изображений в ЦЛТ в некоторые моменты времени t0, t1, t2, t0 < t1 < t2. Обсудим подробно эту схему.
Введем неподвижную декартову систему координат OXYZ. Ось y перпендикулярна плоскости OXZ.
Плоскость, проходящая через фронтальную поверхность регистратора рентгеновского излучения,
совпадает с плоскостью OXY.
Система ЦЛТ состоит из источника рентгеновского излучения (1), объекта контроля (2), циф-
рового регистратора рентгеновского излучения (3). В объекте контроля выделяется часть слоя,
интересующего потребителя (зона интереса). Для удобства рассмотрим сечение ОК плоскостью
y = 0. Для него зона интереса S характеризуется прямолинейным отрезком AB, AB⊂S. Изображение
(изображения) формируется (формируются) на цифровом регистраторе рентгеновского излучения
с размером по оси x — Q. Пусть расстояние между источником рентгеновского излучения и пло-
скостью OXY в процессе сканирования остается неизменным и равно F. Вектора скоростей источ-
ника излучения VX и регистратора VR параллельны друг другу и плоскости OXY и направлены в
Дефектоскопия
№ 5
2019
48
С.П. Осипов, Е.Ю. Усачёв, С.В. Чахлов и др.
z
VX
t = t0
z
t = t1
1
1
V
X
2
A
B
2
A
B
F
F
D
D
xA(t0)
xB(t0
)
xA(t1)
xB(t1)
3
x
3
x
V
R
VR
Q
Q
z
t = t2
1
VX
2
A
B
Рис. 1. Геометрическая схема формирования
F
промежуточных изображений в ЦЛТ.
D
xA(t2)
xB(t2)
3
x
VR
Q
противоположные стороны. Приведем условия согласования геометрических параметров схемы
контроля для систем ЦЛТ.
Для корректного обоснования необходимых условий согласования введем систему координат
O ′X′Y′. Для удобства ось x′ параллельна оси x, а ось y′ — оси y. Эта система координат связана с
фронтальной плоскостью регистратора рентгеновского излучения. В общем случае фронтальная
плоскость регистратора R представляет собой прямоугольник размером M×N, то есть
R={(x′,y′): 0≤ x′≤M; 0≤ y′≤N}.
(1)
Обозначим через P(t, S) проекцию (образ) зоны интереса S (оригинала) на фронтальную
поверхность регистратора в момент времени t. Исходя из описания процесса формирования в
линейной томографии, можно формализовать очевидное условие для проекции P(t, S) и описать
его следующим выражением:
P(t, S) ⊂ R, P(t1, S) ≅ P(t2, S) ≡ P0, ∀ t1, t2, 0 ≤ t1< t2 ≤ ttot.
(2)
Здесь ttot — общее время формирования в линейной томографии. Условие тождественной экви-
валентности «≅» в (2) нуждается в пояснении, которое основывается на связи точек оригинала и
образа
∀ (x, y)∈ S ∃ (x′, y′)∈P0, (x, y)↔(x′, y′).
(3)
Условие (3) можно назвать условием связи оригинала и образа: любой точке (x, y), принадле-
жащей оригиналу S, взаимно однозначно соответствует точка (x′, y′) образа P0 и, наоборот, любой
точке (x′, y′) образа P0 — точка (x, y) оригинала S.
Условие (3) позволяет получить аналитическое описание взаимного и однозначного соответ-
ствия оригинала и образа. Для этого необходимо найти временную зависимость координат точки
(x′, y′), соответствующих условию (3), в неподвижной системе координат OXYZ. Искомое соотно-
шение выводится из принадлежности трех точек одной прямой линии: центра излучателя; точки
(x, y, z)∈ S; эквивалентной (x, y, z) точки (x′, y′, z′), но в системе координат OXYZ. Приведем необ-
ходимый ряд преобразований, которые основываются на подходе [14, 23].
Дефектоскопия
№ 5
2019
Математическая модель цифровой линейной томографии
49
В начальный момент времени t = 0 центр излучающего пятна имеет координаты (0, 0, F). За
время t центр излучателя переместится в точку с координатами (Vx t, 0, F). Пусть точка с коорди-
натами (x, y, D) принадлежит зоне интереса, то есть (x, y, D)∈S. В процессе процедуры контроля
она не перемещается.
В соответствии с условием связи оригинала и образа находятся координаты точки, эквивалент-
ной точке (x, y, D) в момент времени t с начала процедуры контроля:
D
D
x t)
=-V
t
+
x
1+
R
X
F-D
F−D
(4)
D
y t)
=
y
1+
R
F-D
Скорость перемещения регистратора VR связана со скоростью перемещения источника рентге-
новского излучения VX следующим соотношением:
D
V
=-V
(5)
R
X
F-D
Выражение (5) связывает скорость перемещения регистратора рентгеновского излучения со
скоростью перемещения источника и параметрами геометрической схемы контроля в линейной
томографии.
Условие (3) с учетом (4), (5) можно записать как:
D
x′ t)
=
x
1+
-
x
(0)
=
x′
(0)
R
A
R
F-D
(6)
D
y′ t)
=
y
1+
-
y
(0)
=
y′
(0)
R
A
R
F-D
Равенство (6) является необходимым и в динамической геометрической схеме сканирования
применительно к цифровой линейной томографии. В совокупности с выражениями (4), (5) оно
является составной частью математической модели формирования изображений в ЦЛТ.
1.2. Математическая модель формирования промежуточных и итоговых изображений
в цифровой линейной томографии
1.2.1. Основы модели
Отличие разрабатываемой модели от существующих математических моделей формирования
цифровых радиографических изображений заключается в непрерывном временном изменении
геометрии контроля и кажущемся временном изменении объекта контроля, обусловленным непре-
рывным изменением ракурса, под которым объект просматривается.
Рассмотрим модель системы ЦЛТ на основе матричного регистратора и источника рентгенов-
ского излучения. Пусть регистратор имеет физические размеры LX × LY в мм2 с количеством эле-
ментов изображения M × N пикселей, характеризуется материалом и толщиной радиационно-чув-
ствительного преобразователя (РЧП). Материал РЧП определяется эффективным атомным номе-
ром Zd и плотностью ρd. Важнейшим параметром регистратора является разрядность аналогово-
цифрового преобразователя (АЦП) k. Вспомогательными (расчетными) параметрами являются
физические размеры пикселя: lX × lY, lX = LX /M, lY = LY /N.
К основным характеристикам источника рентгеновского излучения относятся: максимальная
энергия рентгеновского излучения Emax; энергетический спектр излучения f(E, Emax); толщина и
параметры материала предварительного фильтра рентгеновского излучения hf , Zf, ρf .
Геометрическую схему сканирования характеризуют расстояние F между линиями, по которым
двигаются центры излучателя и регистратора рентгеновского излучения, и расстояние D от оси
зоны интереса до регистратора. Согласованность перемещений источника и регистратора достига-
ется связью скоростей VX и VR, описываемой формулой (5).
Отметим, что в ЦЛТ нет необходимости интегрировать распределение аналогового сигнала по
поверхности регистратора (бесконечную последовательность виртуальных изображений) за все
Дефектоскопия
№ 5
2019
50
С.П. Осипов, Е.Ю. Усачёв, С.В. Чахлов и др.
время измерения ttot. Предпочтительным является получение набора промежуточных цифровых
радиографических изображений Pi, i = 1…i0 через равные промежутки времени ∆t - ∆t = ttot/i0.
В последующем может быть проведено суммирование этих изображений или любые другие мате-
матические действия.
Сделаем несколько допущений, которые позволят существенно ускорить процесс вычислений,
без потери общности модели: первое — для рассматриваемых систем lX << F и lY << F, поэтому
можно не учитывать расходимость пучка в физических пределах отдельного пикселя, второе —
перемещение источника и регистратора за время ∆t сопоставимо с физическим размером пикселя
по оси x. Разумеется, второе допущение является излишне жестким, но на стадии имитационного
моделирования систем ЦЛТ вполне приемлемо, так как интервал ∆t может быть разбит на несколь-
ко интервалов.
Опишем этапы формирования промежуточных изображений.
Формируемые изображения представляют собой дискретные наборы точек — матрицы разме-
ром M×N. Каждый пиксель изображений определяется парой (i, j), i = 1…M, j = 1…N. Точка с
координатами x′, y′ принадлежит пикселю (i, j), если
i = [x′/lX]+1, j = [y′/lY] + 1,
(7)
где [arg] — целая часть аргумента arg.
На первом этапе (стадии предварительных измерений) формируется последовательность циф-
ровых изображений для выключенного источника рентгеновского излучения, которая оценивает
выборочные средние значения оцифрованных темновых сигналов по матрице фотопреобразовате-
лей. На выходе этого этапа будет сформировано изображение B = Bij, необходимое для калибровки
«по-черному». Оно не зависит от взаимного расположения источника и регистратора излучения,
поэтому формируется заранее.
На втором этапе формируется последовательность промежуточных изображений WBn без объ-
екта контроля, но с соблюдением соответствующей геометрии сканирования. Пусть изображения
формируются через промежутки времени длительностью ∆t. Здесь и далее индекс n определяет
текущее время tn = n∆t и положения источника и детектора излучения. Для удобства назовем пере-
менную n номером состояния. Приведем необходимые выражения для текущей координаты xn
центра излучателя и текущей координаты xRn угловой точки регистратора. Эти выражения требу-
ются и для следующего этапа:
x
=V
n∆t
n
X
(8)
D
D
x
=-V
n∆t
+
x
1+
Rn
X
R
F-D
F−D
Полученные изображения подвергаются калибровке «по-черному», в результате получается
набор изображений Wn = WBn - B. Изображения Wn необходимы для проведения калибровки
«по-белому». Этот этап является затратным по времени, но без изображений Wn невозможно полу-
чить высококачественное изображение зоны интереса.
Аналогично [24] выражение, позволяющее оценить промежуточное первичное радиографиче-
ское изображение JBn с точностью до коэффициента преобразования энергии, имеет вид
n
E
max
h n,i,j)
l
l
cosθ
N
n
X Y
ij
0
n
n
n
n
JB
=
E
(E,θ
)
f
(E,E
)exp
−
m(E,
Z l))ρ
(l)dl
ε(E,θ
)dE+B
ij
∫
ab
ij
max
∫
ij
ij
(9)
n
(
F
ij
)2
0
0
Сделаем ряд необходимых пояснений относительно переменных в выражении (9):
n
θ
— угол между нормалью к регистратору и направлением из источника излучения на центр
ij
пикселя с координатами (i, j) для n-го состояния;
N0 — количество фотонов, вылетающих из источника в единицу телесного угла за время изме-
рения;
n
ij
F
— расстояние от источника до центра пикселя с координатами (i, j) для n-го состояния;
n
E
ab
(E,θ
ij
)
— среднее значение поглощенной энергии зарегистрированного фотона с энергией E;
Bij — энергетический эквивалент темнового сигнала с канала, соответствующего пикселю с
координатами (i, j);
Дефектоскопия
№ 5
2019
Математическая модель цифровой линейной томографии
51
h(n, i, j) — толщина ОК по направлению от источника до центра пикселя с координатами (i, j)
для n-го состояния;
n
(E,
)
ε
θ
— эффективность регистрации излучения;
ij
m — массовый коэффициент ослабления (МКО) излучения;
Zn(l), ρn(l) — распределения эффективного атомного номера и плотности материала ОК по
лучу, связывающему источник излучения и центр пикселя с координатами (i, j) для n-го состояния.
Значения расстоянийFnij оценим с помощью выражения
n
n
2
n
2
n
2
F
=
(x
−x′
)
+(y
−y
′
)
+(z
−z′
)
(10)
ij
n
ij
n
ij
n
ij
Координаты центра излучателя и центров ij-х детекторов (пикселей), необходимые для вычис-
лений по формуле (10), определим по формулам
l
x
D
l
x
i
−
−V
X
n∆t
n
2
F-D
x
V
n∆t
x′
n
X
ij
l
n
y
y
=
0
y′
=
l
j
−
n
ij
y
(11)
2
n
z
F
z′
n
ij
0
Соответствующие выражения для косинусов углов co
θ запишем следующим образом:
n
z′
−
z
n
ij
n
cosθ
=
(12)
ij
n
F
ij
Толщины h(n, i, j) и распределения m(E, l), ρ(l) по соответствующему лучу определяются исхо-
дя из формы и внутренней структуры конкретного объекта контроля.
2.2.2. Оцифровка и калибровка изображений
Первичные виртуальные калибровочные и теневые изображения B, WBn, JBn с помощью АЦП
трансформируются в соответствующие цифровые изображения Bd, WBd, JBd
n
n
B
WB
JB
ij
n
ij
n
ij
Cmax(B)
B
=
,
WB
=
,
JB
=
,
∆=
,
C
>1
(13)
dij
dij
dij
k
∆
∆
∆
2
−1
Коэффициент C не позволяет цифровым сигналам превысить максимальное значение 2k-1 для
любого уровня шумов.
Выше отмечено, что калибровка «по-черному» сводится к вычитанию темнового сигнала. В
n
результате формируются цифровые изображения
W
(без ОК) и ndI (с ОК)
d
n
n
n
n
W
dij
=WB
dij
−B
dij
,
I
dij
= JB
dij
−B
dij
(14)
Калибровка «по-белому» предназначена для устранения неоднородности коэффициентов пре-
образования энергии по массиву детекторов, поэтому формула для оценки ij-го элемента соответ-
ствующего изображения Pn с координатами имеет вид
n
n
I
dij
P
=
(15)
ij
n
W
dij
Из практических соображений изображение P подвергают дополнительному логарифмическо-
му преобразованию
n
n
Y
=-
ln
P
(16)
ij
ij
Изображение Yn представляет собой распределение оценок толщины ОК в длинах свободного
пробега (д.с.п.) и суженый диапазон изменения толщины ОК в д.с.п. позволяет качественно визу-
ализировать конечное изображение с учетом ограничений на число полутонов.
Дефектоскопия
№ 5
2019
52
С.П. Осипов, Е.Ю. Усачёв, С.В. Чахлов и др.
2.2.3. Формирование конечного изображения цифровой линейной томографии
Линейная томография отличается крайней простотой формирования конечного изображения. В
ЦЛТ алгоритм обработки также не отличается сложностью.
Конечное изображение T равняется сумме всей совокупности промежуточных изображений Yn
n0
n
T
ij
=∑
Y
ij
(17)
n
=1
В выражении значение n0 равно общему количеству возможных дискретных состояний (поло-
жений) системы при взаимном перемещении источника и регистратора друг относительно друга.
2.2.4. Визуализация изображений в цифровой реализации линейной томографии
Математическая модель ЦЛТ будет неполной без описания процесса визуализации конечного
изображения линейной томографии.
В качестве алгоритма процесса формирования полутонового изображения G из изображения T
может быть использовано линейное преобразование с максимальным использованием полутонов
шкалы серого
T
ij
-T
min
G
=
255
ij
,
(18)
T
−T
max
min
здесь Tmin = min(T); Tmax = max(T).
Для использования приведенных выше основ модели в практических приложениях необходи-
мо создать модель ОК, которая должна содержать описание внутренней структуры ОК и конкре-
тизацию связи внутренней структуры со всей совокупностью промежуточных первичных радио-
графических изображений.
2. МОДЕЛЬ ОБЪЕКТА КОНТРОЛЯ
2.1. Описание внутренней структуры объектов контроля
Естественно принять, что внутренняя структура ОК для любого из состояний системы «источ-
ник — регистратор» неизменна.
Пусть Φ — часть пространства, занимаемая ОК и доступная для просмотра системой «источ-
ник — регистратор». В любой точке (x, y, z)∈Φ материал ОК характеризуется двумя физическими
параметрами: эффективным атомным номером Z и плотностью ρ. Эффективный атомный номер Z
определяет значение МКО излучения m, необходимое для имитации первичных промежуточных
изображений ОК по формуле (9).
Из сказанного выше следует, что внутреннюю структуру ОК определяют два множества
Z = {Z(x, y, z), (x, y, z)∈Φ} и ρ = {ρ(x, y, z), (x, y, z)∈Φ}.
2.2. Связь внутренней структуры объекта контроля с промежуточным первичным
радиографическим изображением
Выражение (9) в обобщенном виде описывает искомую связь, для его использования на прак-
тике необходимо подробно описать показатель экспоненты в (9))
h n,i,j)
n
n
(
p =E n,i,j)
m
(E,
Z l))ρ l)dl
(19)
∫
0
Уравнение линии, проходящей через источник излучения и центр пикселя с координатами (i, j)
для n-го состояния, в параметрическом виде запишем следующим образом:
n
n
n
x- x′
y- y′
z- z′
ij
ij
ij
=
=
=
q
(20)
n
n
n
x
−
x′
y
−
y
′
z
−
z′
n
ij
n
ij
n
ij
Дефектоскопия
№ 5
2019
Математическая модель цифровой линейной томографии
53
Выражение (19) в этом случае трансформируется в формулу
2
z n,i,j)
n
(
p =
E n,i,j)
m(
Z x,y,z),
E ρ(x,y,z)dz
(21)
∫
1
z n,i,j)
В (21) z1(n, i, j) и z2(n, i, j) — диапазон изменения координаты z по линии (20) для точек, при-
надлежащих ОК.
Формулы (9)—(21) представляют собой математическую модель цифровой системы линейной
томографии, которая может быть использована для анализа влияния того или иного физического
или технического фактора на качество получаемых изображений методом вычислительного экс-
перимента. Указанные формулы являются базой для алгоритма имитационного моделирования
конечных изображений ЦЛТ.
Ниже для иллюстрации рассмотрим пример формирования изображений некоторых тестовых
объектов методом, описанным выше.
3. ПРИМЕР ФОРМИРОВАНИЯ ПРОМЕЖУТОЧНЫХ И ИТОГОВЫХ ИЗОБРАЖЕНИЙ
В ЦИФРОВОЙ ЛИНЕЙНОЙ ТОМОГРАФИИ
Помимо разработки математической и имитационной моделей ЦЛТ, основной целью данной
статьи является иллюстрация главного преимущества анализируемого метода — частичного
устранения наложения теней фрагментов ОК, характерного для цифровой радиографии. Кроме
этого, необходимо продемонстрировать возможность различения локальных неоднородностей по
плотности и расположению в объеме ОК.
Для реализации поставленных целей необходим специализированный тестовый объект. В каче-
стве его примера может быть выбран барьер толщиной H с несколькими локальными сферически-
ми фрагментами из материалов, отличающихся по плотности и эффективному атомному номеру от
основного материала барьера. Материал барьера характеризуется параметрами (ρ0, Z0). Локальные
фрагменты в форме сфер с радиусами rk состоят из материалов с плотностями ρk и эффективными
атомными номерами Zk, а центры сфер привязаны к точкам с координатами (xk, yk, zk). На рис. 2
приведено сечение тестового объекта.
Рис. 2. Сечение тестового объекта.
В соответствии с подходом, описанным выше, структура тестового объекта определяется мно-
жествами Z и ρ, соответствующие им функции Z(x, y, z), ρ(x, y, z) для рассматриваемого случая
имеют вид
ρ
2
2
2
k
2
,
∃
k,1≤
k ≤ k
,
(
x− x
)
+
(
y- y
)
+
(
z- z
)
≤
r
0
k
k
k
k
ρ(x,y,z)
Z
k
=
(22)
Z x,y,z)
ρ
0
2
2
2
2
,
∀
k,1≤
k ≤ k
,
(
x− x
)
+
(
y- y
)
+
(
z- z
)
>
r
0
k
k
k
k
Z
0
Дефектоскопия
№ 5
2019
54
С.П. Осипов, Е.Ю. Усачёв, С.В. Чахлов и др.
Таблица
1
Параметры локальных неоднородностей
Ряд
ri, i =1…4
ρi, i =1…4
Zi, i = 1…4
xi, i = 1…4
yi, i = 1…4
zi, i = 1…4
1
2,5 мм
0 г/см3
8
75+i×15 мм
300 мм
420 мм
2
2,5 мм
3,95 г/см3
10,58
75+i×15 мм
300 мм
440 мм
3
5/i мм
0 г/см3
8
75+i×15 мм
300 мм
460 мм
4
1×i мм
3,95 г/см3
10,58
75+i×15 мм
300 мм
480 мм
В качестве тестового объекта был выбран барьер из алюминия толщиной 100 мм (Z0 = 13,
ρ0 = 2,7 г/см3) с двадцатью сферическими локальными неоднородностями, k0 = 20. В табл. 1 при-
ведены параметры локальных неоднородностей, расположенных в четыре ряда. Схематичное
сечение подобного объекта приведено на рис. 2.
Моделирование проводилось для следующих условий:
максимальная энергия рентгеновского излучения Emax= 450 кэВ;
расстояние от источника излучения до ТО — 500 мм;
расстояние от источника излучения до регистратора — 1000 мм;
размер активной части регистратора — 400×400 мм; пикселя — 200×200 мкм2; толщина ради-
ационно-чувствительного объема из Gd2O2S (оксисульфид гадолиния) — h = 0,3 мм;
количество фотонов, вылетающих из источника в единицу телесного угла за время измерения
N0, — 1010;
количество состояний системы n — 300.
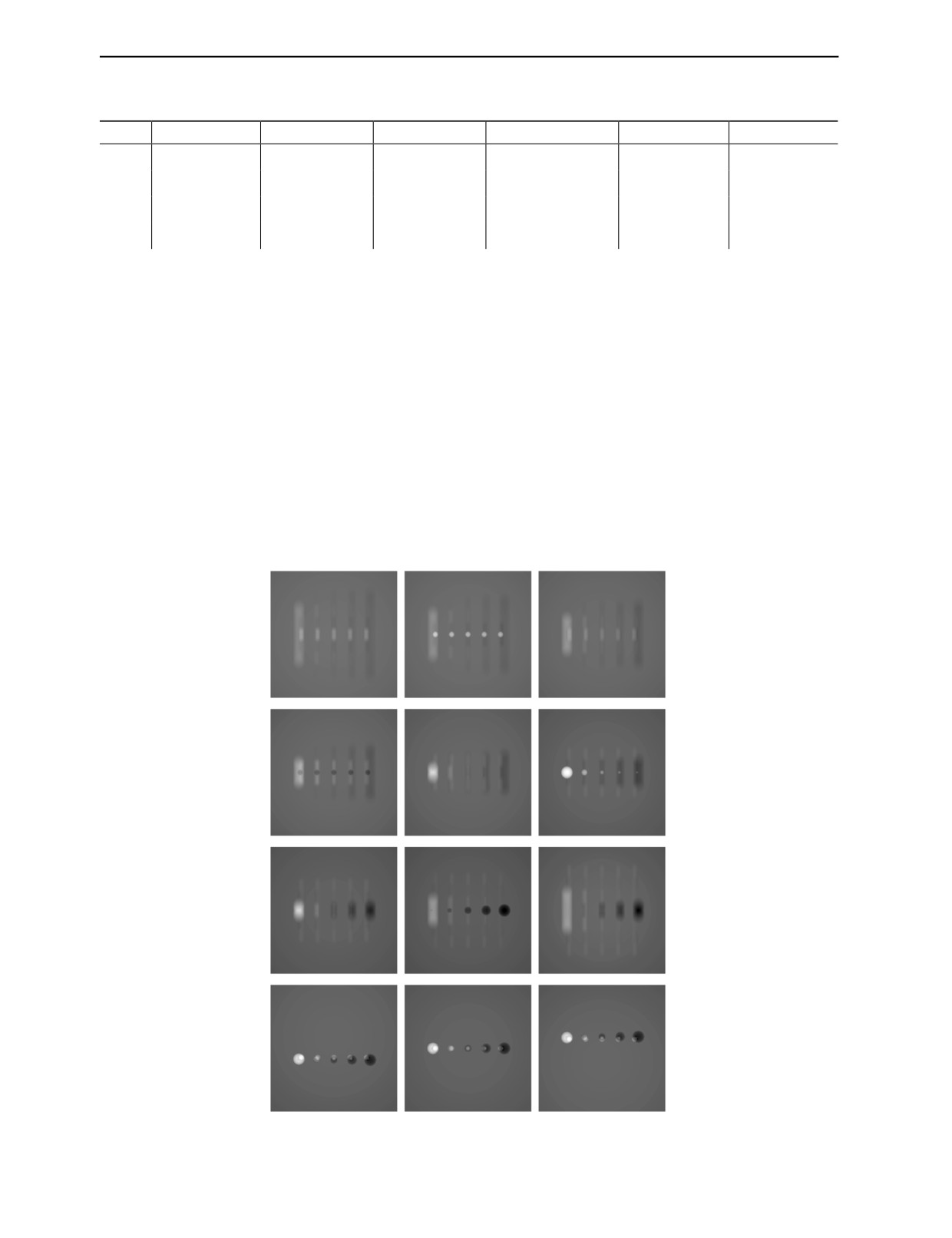
На рис. 3 приведены изображения слоев интереса и радиографические изображения с наложе-
нием теней для нескольких состояний системы.
D = 410 мм
D = 420 мм
D = 430 мм
D = 440 мм
D = 450 мм
D = 460 мм
D = 470 мм
D = 480 мм
D = 490 мм
140-е состояние системы 150-е состояние системы 160-е состояние системы
Рис. 3. Изображения слоев интереса и радиографические изображения с наложением теней.
Дефектоскопия
№ 5
2019
Математическая модель цифровой линейной томографии
55
На изображениях слоев интереса, соответствующих расположению рядов локальных неодно-
родностей, поры и уплотнения выявляются с достаточной четкостью, на радиографических изо-
бражениях тени неоднородностей накладываются друг на друга.
Отметим, что наличие размытых теней, размеры которых связаны с параметрами системы
ЦЛТ, позволяет определить расположение слоев с локальными неоднородностями. В этой ситуа-
ции совокупность промежуточных изображений ЦЛТ будет представлять собой набор проекций,
который может быть обработан алгоритмами ЦТС в различных его реализациях [25]. Дополнение
ЦТС методом дуальных энергий существенно повысит информативную способность метода [26,
27] и позволит идентифицировать материалы ОК и локальных неоднородностей, что обуславлива-
ет возможность применения систем ЦЛТ в досмотровом контроле багажа и ручной клади.
ЗАКЛЮЧЕНИЕ
Разработаны математическая и имитационная модели цифровой линейной томографии, кото-
рые учитывают геометрические параметры схемы контроля, максимальную энергию рентгенов-
ского излучения, конструкцию цифрового детектора, разрядность аналого-цифрового преобра-
зователя. Модели реализованы в виде алгоритма и программы в системе математических вычис-
лений MathCad. Результаты вычислительного эксперимента для тестового объекта со сфериче-
скими локальными неоднородностями подтверждают эффективность применения полученной
математической модели, алгоритма и программы имитационного моделирования. Полученные
модели и программа могут быть использованы для обоснования возможности применения
систем линейной томографии для контроля разнообразных объектов, анализа влияния различ-
ных физических и технических факторов на качество контроля и совершенствования алгоритмов
обработки изображений.
Исследование проводилось в Томском политехническом университете в рамках гранта Программы
повышения конкурентоспособности Томского политехнического университета.
СПИСОК ЛИТЕРАТУРЫ
1. Glasser O. WC Roentgen and the discovery of the Roentgen rays // AJR. American journal of
roentgenology. 1995. V. 165. No. 5. P. 1033—1040.
2. Goodman P.C. The new light: discovery and introduction of the X-ray // AJR. American journal of
roentgenology. 1995. V. 165. No. 5. P. 1041—1045.
3. Singh R. The Nobel Laureate WC Roentgen and His X-Rays // Indian Journal of History of Science.
2016. V. 51. P. 521—530.
4. Korner M., Weber C.H., Wirth S., Pfeifer K.J., Reiser M.F., Treitl M. Advances in digital radiography:
physical principles and system overview // Radiographics. 2007. V. 27. No. 3. P. 675—686.
5. Seynaeve P.C., Broos J.I. The history of tomography // Journal belge de radiologie. 1995. V. 78. No. 5.
P. 284—288.
6. Bocage M. Procede et dispositifs de radiographie sur plaque en movement // Franz Patentschrift. 1922.
V. 536. P. 464.
7. Friedland G.W., Thurber B.D. The birth of CT // AJR. American journal of roentgenology. 1996. V. 167.
No. 6. P. 1365—1370.
8. Kalender W.A. Computed tomography: fundamentals, system technology, image quality, applications.
2nd edition. Publicis Corporate Publishing, 2005. 304 p.
9. Dobbins J.T. Tomosynthesis imaging: at a translational crossroads // Medical physics. 2009. V. 36.
No. 6. Part 1. P. 1956—1967.
10. Никитин М.М., Ратобыльский Г.В. Цифровой томосинтез в диагностике и контроле эффектив-
ности лечения туберкулеза органов дыхания (обзор литературы) // Медицинская визуализация. 2016.
№ 3. С. 95—102.
11. Nevgasymyi A.A., Miroshnichenko N.S., Miroshnichenko S.I. Modification of the digital radiographic
units with the linear tomography mode to units with the tomosynthesis mode / 38th International Conference
on Electronics and Nanotechnology (ELNANO). IEEE, 2018. P. 402—405.
12. Senchurov S., Motolyga O. The enhancement of the linear X-Ray tomography with digital tomosynthesis
algorithms / XXXIII International Scientific Conference (ELNANO). IEEE, 2013. P. 319—321.
13. Gomi T., Hirano H., Nakajima M., Umeda T. X-ray digital linear tomosynthesis imaging // Journal of
Biomedical Science and Engineering. 2011. V. 4. No. 6. P. 443—453.
14. Dobbins III J.T., Godfrey D.J. Digital X-ray tomosynthesis: current state of the art and clinical potential
// Physics in medicine & biology. 2003. V. 48. No. 19. P. R65—R106.
15. Kanter B.M., Artemiev B.V., Vladimirov L.V., Artemyev I.B. Challenges in X-ray medical diagnosis //
Biomedical Engineering. 2017. V. 50. No. 6. P. 410—415.
Дефектоскопия
№ 5
2019
56
С.П. Осипов, Е.Ю. Усачёв, С.В. Чахлов и др.
16. Wakimoto K., Blunt J., Carlos C., Monteiro P.J., Ostertag C.P., Albert R. Digital laminography
assessment of the damage in concrete exposed to freezing temperatures // Cement and Concrete Research.
2008. V. 38. No. 10. P. 1232—1245.
17. Shi X., Fu J., Wang J., Yuan Q., Huang W., Zhang K., Zhu P., Jiang B. Development of synchrotron
radiation computed laminography for plate-shell structures / Selected Papers of the Chinese Society for Optical
Engineering Conferences held October and November 2016. International Society for Optics and Photonics,
2017. V. 10255. No article 102551M.
18. Tada M., Matsui H. Computed laminography XAFS / XAFS Techniques for Catalysts, Nanomaterials,
and Surfaces. Springer, Cham, 2017. P. 149—155.
19. Zhu H., Roehrig H., Hayworth M. Method for improving image quality in digital linear tomography //
Image and Vision Computing. 1986. V. 4. No. 1. P. 25—28.
20. Воронков О.Ю., Синютин С.А. Метод получения лучевых сумм при моделировании установок
для томосинтеза на основе алгоритма Брезенхема // Изв. Южного федерального университета. Техн.
науки. 2017. № 6 (191). С. 189—200.
21. Ge J., Chan H.P., Sahiner B., Zhang Y., Wei J., Hadjiiski L.M., Zhou C. Digital tomosynthesis
mammography: Intra-and interplane artifact reduction for high-contrast objects on reconstructed slices using
a priori 3D geometrical information / Medical Imaging 2007: Image Processing. International Society for
Optics and Photonics, 2007. V. 6512. No. article 65124Q.
22. Buzzi A.E., Suárez M.V. Tomografía lineal: nacimiento, gloria y ocaso de un método // Revista argentina
de radiología. 2013. V. 77. No. 3. P. 236—244.
23. Gondrom S., Zhou J., Maisl M., Reiter H., Kröning M., Arnold W. X-ray computed laminography: an
approach of computed tomography for applications with limited access // Nuclear engineering and design.
1999. V. 190. No. 1-2. P. 141—147.
24. Udod V.A., Osipov S.P., Wang Y. The mathematical model of image, generated by scanning digital
radiography system // IOP Conference Series: Materials Science and Engineering. IOP Publishing, 2017.
V. 168. No. 1. No. article 012042.
25. Ewert U., Baranov V. A., Borchardt K. Cross-sectional imaging of building elements by new non-linear
tomosynthesis techniques using imaging plates and 60Co radiation // NDT & E International. 1997. V. 30.
No. 4. P. 243—248.
26. Κούκου Β. Methodology development for breast cancer diagnosis using dual energy X-rays and digital
tomosynthesis: Doctoral dissertation. Rio-Patras, Greece: University of Patras, 2017. 126 p.
27. Gomi T., Sakai R., Goto M., Hara H., Watanabe Y. Development of a novel algorithm for metal artifact
reduction in digital tomosynthesis using projection-based dual-energy material decomposition for arthroplasty:
A phantom study // Physica Medica. 2018. V. 53. P. 4—16.
Дефектоскопия
№ 5
2019