УДК 620.179.162:534.87
ОБРАТНЫЕ ЗАДАЧИ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ В НЕРАЗРУШАЮЩЕМ
КОНТРОЛЕ: МАТЕМАТИЧЕСКИЕ МЕТОДЫ И ЭКСПЕРИМЕНТ
© 2019 г. Е.Г. Базулин1,*, А.В. Гончарский2,**, С.Ю. Романов 2,***, С.Ю. Серёжников 2,****
1ООО «Научно-производственный центр «ЭХО+», Россия 123458 Москва, ул. Твардовского, 8,
Технопарк «Строгино»
2 МГУ им. М.В. Ломоносова, Россия 119992 Москва, Воробьевы горы, 1, стр. 4,
E-mail: *bazulin@echoplus.ru;
**gonchar@srcc.msu.ru; ***romanov60@gmail.com; ****s2110sj@gmail.com
Поступила в редакцию 13.11.2018; после доработки 24.04.2019
Принята к публикации 29.04.2019
Статья посвящена разработке ультразвуковых томографических методов в неразрушающем контроле. Обратная
задача реконструкции скоростного разреза рассматривается как нелинейная коэффициентная обратная задача для
скалярного волнового уравнения. Разработаны эффективные итерационные методы ее решения на суперкомпьютере,
использующие прямые формулы для вычисления градиента функционала невязки между рассчитанным и экспери-
ментально измеренным волновым полем на детекторах. Эффективность алгоритмов апробирована на эксперимен-
тальных данных. Проведены первые эксперименты на специально изготовленных твердотельных образцах с простей-
шим расположением включения при регистрации сигналов стандартными ультразвуковыми антенными решетками на
частоте 5 МГц. Показано, что с помощью разработанных томографических методов в схеме на отражение и прохож-
дение в реальном эксперименте можно не только обнаружить границы отражателей, но и определить скоростной
разрез внутри отражателей.
Ключевые слова: обратные задачи, ультразвуковая томография, ультразвуковой неразрушающий контроль, антенная
решетка, скорость звука.
DOI: 10.1134/S0130308219060046
1. ВВЕДЕНИЕ
В настоящее время томографические методы широко используются как в медицине, так и в
промышленности. Наиболее распространены рентгеновские томографы. Если в томографе исполь-
зовать ультразвуковые источники, то для интерпретации томографических данных необходимо
применять волновые модели. Математические методы решения обратных задач волновой томо-
графии намного сложнее, чем в рентгеновской томографии. В последние годы появилось большое
количество публикаций в области разработки методов решения обратных задач томографии в вол-
новых моделях.
Прорывные результаты в области решения задач волновой томографии как коэффициентных
обратных задач связаны с возможностью на математическом уровне строгости вычисления градиен-
та функционала невязки между расчетным волновым полем и измеренным в эксперименте [1—4]. В
этой постановке модель учитывает волновые эффекты, а искомыми коэффициентами являются как
скорость распространения волны, так и коэффициент поглощения как функции координат.
В настоящее время методы волновой томографии уже используют в медицине и сейсмике. В
сейсмике существует направление «full waveform inversion», в котором обратная задача рассматри-
вается как нелинейная задача в волновой модели, для решения которой применяют итерационные
методы [5, 6]. Специфика задач в сейсмике такова, что используются в основном только отражен-
ные волны. В такой постановке можно реконструировать только границы слоев. В отличие от этих
работ в настоящей статье используется томографический подход, в котором регистрируются как
отраженные, так и прошедшие волны. Именно прошедшие через неоднородность волны позволяют
восстанавливать скоростной разрез неоднородности.
В ультразвуковом неразрушающем контроле (УЗК) количество публикаций в области рекон-
струкции скоростного разреза томографическими методами в волновых моделях с применением
проходящих волн невелико, в отличие от сейсмоакустики и медицины. Считается, что в задачах
УЗК можно использовать методы решения обратных задач, разработанные для сейсмоакустики.
Как и в сейсмоакустике, эти попытки в УЗК также связаны только с использованием отраженного
излучения [7, 8]. Примером могут служить методы синтезированной апертуры (Synthetic Aperture
Focusing Technique (SAFT)) [9—16], которые ориентированы на определение границ дефектов в
твердом теле. Продвинутые варианты получили название «topological imaging», «time reverse»
[17—23].
Обратные задачи ультразвуковой томографии в неразрущающем контроле...
31
На уровне модельных задач сделаны попытки применить методы «full waveform inversion» в
задачах УЗК [24, 25]. В модельных расчетах используется очень маленькое количество источни-
ков и приемников и грубые сетки, что существенно ограничивает возможности томографических
методов. Как показано в настоящей статье, высокое разрешение в обратных задачах можно полу-
чить при существенном увеличении количества узлов сетки, количества источников и количества
приемников. К сожалению, зависимость количества операций от числа узлов сетки имеет вид n3.
В настоящей статье показано, что томографический подход в задачах УЗК вполне реализуем на
высокопроизводительных вычислительных системах.
Что касается апробации томографических методов реконструкции скоростного разреза в вол-
новых моделях с использованием проходящих волн в УЗК на экспериментальных данных, то коли-
чество таких работ практически стремится к нулю. В данной работе впервые предлагаемые томо-
графические методы апробированы на экспериментальных данных. Отметим также исследования
по применению лучевых моделей в томографии для нахождения скорости и поглощения [26, 27].
2. ПОСТАНОВКА ОБРАТНОЙ ЗАДАЧИ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ
В 2D-ДЕФЕКТОСКОПИИ И МЕТОДЫ ЕЕ РЕШЕНИЯ
В задачах УЗК в силу своей простоты широко распространена скалярная волновая модель,
которая достаточно точно описывает распространение отдельно продольных или поперечных
волн. Ограничимся рассмотрением продольных волн, которые при проведении измерений в экс-
перименте можно отделить от поперечных волн по времени прихода на детекторы. Будем описы-
вать распространение продольной волны скалярным волновым уравнением с нулевыми начальны-
ми условиями:
c r)u r,t)
tt
- ∆u r,t)
=δ(r-r
0
)
g t),
u r,t=
0)
=u r,t
t=
0)
=
0.
(1)
Здесь u(r, t) — скалярное волновое поле, r ∈ RN, N = 2, 3, c-0,5(r) = v(r) — функция скорости про-
дольной волны в среде, ∆ — оператор Лапласа по переменной r. Генерируемый источником
импульс описывается функцией g(t). Расчет волнового поля при заданном c(r) из уравнений (1)
представляет собой прямую задачу.
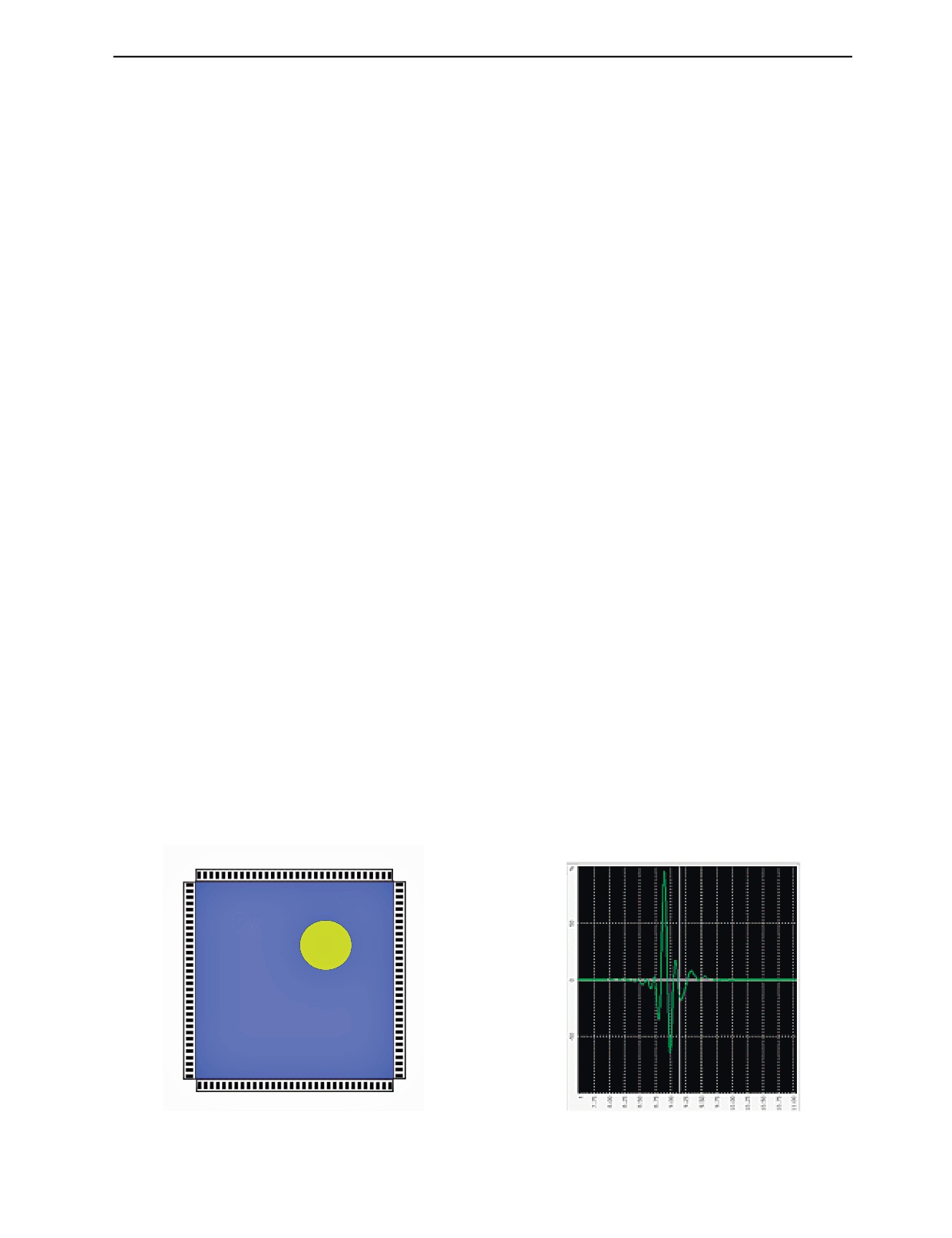
Проведем постановку обратной задачи ультразвуковой томографии в УЗК. Рассмотрим про-
стейшую двумерную задачу, в которой исследуемое тело представляет собой область Q, на грани-
це которой расположены ультразвуковые антенные решетки (АР) с номерами от 1 до 4 (рис. 1).
Внутри области Q расположена область G. Скорость волны v(r) в области G, форма области G и ее
расположение внутри области Q — неизвестны. Скорость волны v(r) в области Q\G постоянна и
известна v(r) = const = v0. В исследуемом теле Q различными элементами АР последовательно воз-
буждаются ультразвуковые импульсы. Обратная задача заключается в восстановлении неизвест-
ной функции скорости v(r) в области Q по данным измерения четырьмя АР волны на границе ∂Q.
Возможны различные схемы эксперимента. Наиболее перспективной является схема, в которой
используются данные как на отражение, так и на прохождение. Более подробно различные томо-
графические схемы описаны ниже.
1
Q
G
4
3
2
Рис. 1. Схема эксперимента.
Рис. 2. Форма зондирующего импульса.
Дефектоскопия
№ 6
2019
32
Е.Г. Базулин, А.В. Гончарский, С.Ю. Романов, С.Ю. Серёжников
Таким образом, обратная задача ультразвуковой томографии в скалярной модели заключается
в реконструкции неизвестной скорости волны v(r) из уравнения (1) в области Q по эксперимен-
тально измеренному волновому полю u(r,t) на границе области Q при зондировании области G
источниками, расположенными на границе ∂Q. При решении обратной задачи не используется
никакой информации о форме области G и ее расположение внутри области Q, скорость внутри
области G ищется не как одно неизвестное число, а как функция v(х, у). Заметим, что измерения
волнового поля могут проводиться только на части границы S⊂∂Q. В нашем примере исследуемая
область Q является квадратом (рис. 1). На рис. 2 представлена форма зондирующих импульсов
длительностью 2-3 периода центральной частоты.
Запишем функционал невязки Ф(с) от аргумента c(r) между экспериментальными данными и
рассчитанным полем при заданном c(r) на границе S [28, 29]
M
T
1
j
Φ
(c)
=
(
u
(
s t;c
)
−
U
(
s,t
))2
dsdt
(2)
∑ ∫∫
j=1
2
0S
Здесь U(s, t) — экспериментальные данные на границе S⊂∂Q за время (0,T); uj(s,t;c) — волновое
поле при решении прямой задачи (1) при заданном коэффициенте c(r). Скорость v(r) и коэффици-
ент c(r) связаны соотношением c-0,5(r) = v(r). Заметим, что при использовании нескольких источ-
ников зондирующего излучения функционал невязки представляет собой сумму по j = 1, … М
значений невязки, полученных для каждого источника. При каждом фиксированном источнике j
интеграл суммируется по времени (0,T) и по области всех приемников, принимающих сигналы для
выбранного источника, T — время регистрации сигнала на приемниках. Время T выбирается с
таким расчетом, чтобы все учитываемые отраженные и преломленные волны достигли приемни-
ков. Обратная задача ставится как задача поиска функции c (r) , минимизирующей функционал
невязки (2)
c
(
r
)
: min
Φ c)
=Φ c)
. Функция c (r) принимается за приближенное решение задачи.
c
(
r
)
Эффективными методами минимизации функционала невязки Ф(с) являются градиентные
методы. Выражение для градиента Ф(с) в строгой математической постановке получено в [3, 4] и
имеет вид:
M
T
1
j
j
Φ′
c
(c)
w
t
(
r t;
c
)
u
t
(
r t;c
)
dt,
(3)
=∑ ∫
j=1
2
0
где uj(r,t;c) — решение «основной» задачи (1); wj(r,t;c) — решение «сопряженной» задачи [30, 31]
c r)
w r,t)-∆w r,t)
=
E r,t)
,
w r,t=T)
=w r,t=T)
=
0.
(4)
tt
r∈S
t
Здесь wtt(r, t) — вторая производная по времени, ∆ — оператор Лапласа по переменной r,
wj(r, t; c) в уравнениях (4) ищется при заданном коэффициенте c(r) для фиксированного j-го источ-
ника. В уравнении (4) E(r, t) = u(s, t) - U(s, t) и определена на части границы S⊂∂Q, где измерена
U(s, t). На границе расчетной области ∂Q ставится условие «неотражения».
Имея явное выражение для градиента (3), можно построить различные итеративные алгорит-
мы минимизации функционала невязки. Приведем метод наискорейшего спуска. Будем считать,
что найден коэффициент c(n) на n-й итерации. Для построения следующего итерационного при-
ближения c(n+1) вычислим градиент
Φ′
c
(
c
)
в точке c(n) и решим задачу минимизации одномерно-
го функционала в направлении градиента. Следующее итерационное приближение c(n+1) опреде-
(
n+1
)
(n)
(
n
)
ляется соотношением
c
=
argminΦ
c
− αΦ′
c
путем минимизация функционала по
(
(
))
c
0
α>
параметру α.
3. ЧИСЛЕННЫЕ МЕТОДЫ
Для численного решения обратной задачи в прямоугольной области объекта Q (см. рис. 1) был
использован конечно-разностный метод во временной области в двумерном случае. Как показано в
[32], использование около 15 точек на длину волны центральной частоты для схемы 4-го порядка
аппроксимации вдоль пространственных координат уравнения (1) обеспечивает достаточную точ-
ность расчетов прямой задачи при характерных параметрах задачи. В экспериментах не использова-
лись 4 первых и 3 последних элемента АР, расположенные близко к боковым границам (см. рис. 1),
в результате чего волны, отраженные от границ прямоугольного объекта Q, приходили на детекторы
Дефектоскопия
№ 6
2019
Обратные задачи ультразвуковой томографии в неразрущающем контроле...
33
с большой задержкой по времени по сравнению с прямой волной от источника. Это позволило выби-
рать время T так, чтобы отсекать по времени волны, отраженные от границ. Последнее позволяет
использовать условие «неотражения» на границе [33].
Для решения рассматриваемой нелинейной обратной задачи необходимо провести огромный
объем вычислений. Это невозможно без использования высокопроизводительных вычислитель-
ных кластеров. Используемая явная разностная схема, позволяет провести высокоэффективное
распараллеливание расчетов на вычислительных узлах кластера [34, 35]. Особенность рассматри-
ваемой задачи ультразвуковой томографии в УЗК в том, что используется большое число (~100)
источников. Вычисления распространения волн в «основной» и «сопряженной» задачах для каж-
дого источника выполняются практически независимо. Простейшая схема распараллеливания
расчетов состоит в использовании ~100 вычислительных ядер, каждое из которых проводит рас-
четы только для своего источника. Такая схема позволяет ускорить вычисления почти в 100 раз по
сравнению с однопроцессорным компьютером.
4. ЧИСЛЕННЫЕ ЭКСПЕРИМЕНТЫ
Численные эксперименты для 2D-обратных задач ультразвуковой томографии в УЗК прово-
дились по схеме эксперимента, показанной на рис. 1 для различных схем зондирования.
Наиболее простая и часто встречающаяся в дефектоскопии схема зондирования, в которой дан-
ные собираются на отражение. В нашем эксперименте в схеме на отражение экспериментальные
данные собираются следующим образом. Сначала используется только АР, обозначенный циф-
рой 1. Последовательно излучает каждый из элементов АР номер 1. При этом в качестве при-
емников используются все элементы АР номер 1. Затем эксперимент продолжается для АР
номер 2, 3 и 4. Таким образом, описанный режим зондирования на отражение включает 4 этапа
сбора данных.
В схеме на прохождение данные собираются следующим образом. Сначала используются толь-
ко две АР с номерами 1 и 2. Последовательно излучает каждый из элементов АР номер 1. При этом
в качестве приемников используются все элементы АР номер 2. Затем последовательно излучает
каждый из элементов АР номер 2, а принимают все элементы АР номер 1. Затем эксперимент про-
должается для АР с номерами 3 и 4. Описанный режим на прохождение включает 4 этапа сбора
данных. В схеме на прохождение и на отражение используются все описанные выше режимы и на
отражение, и на прохождение, что в совокупности дает 8 этапов эксперимента по сбору данных.
В численном эксперименте сначала решалась прямая задача распространения волны в неодно-
родной модельной среде для тестового объекта на рис. 1 для каждого положения источника. На
границе области расчетов Q ставилось граничное условие «неотражения». Волновое поле на
детекторах на границе области Q сохранялось и использовалось в качестве численных экспери-
ментальных данных для решения обратной задачи.
Обратная задача решалась для двух схем зондирования, описанных выше: 1) на прохождение
и 2) на прохождение и отражение. В численном эксперименте скорость звука в области Q\G равна
v0 = 2,33 мм/мкс, скорость звука в круглой неоднородности G равна 2,45 мм/мкс и отличается от v0
примерно на 5 %. Такие параметры примерно соответствуют модельным образцам, изготовленным
для реального физического эксперимента, описанного ниже. Длина волны центральной частоты
импульса λ = 0,466 мм (частота 5 МГц), размер расчетной области — 20×20 мм, размер разностной
сетки — 700×700 точек. В расчетах использовалось 100 положений источников, располагавшихся
равномерно на каждой стороне Q, как показано на рис. 1 (по 25 источников с каждой стороны) c
шагом 0,6 мм. Аналогично располагались приемники.
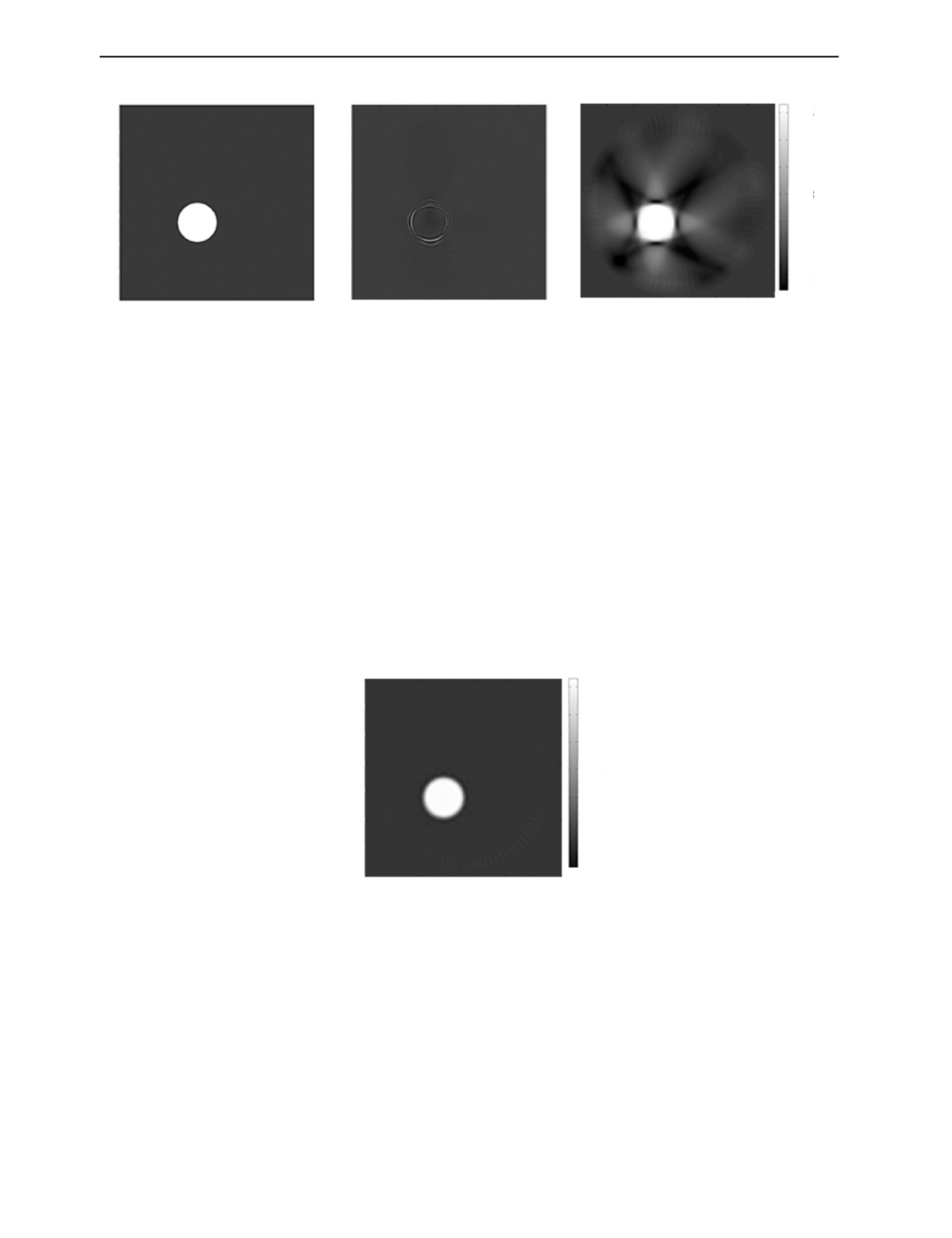
На рис. 3a в растровом виде показано исходное изображение (скоростной разрез) тестового
объекта. На рис. 3б приведено полученное после 40 итераций изображение при проведении рас-
четов в схеме эксперимента на отражение. На рис. 3в — полученное после 40 итераций изображе-
ние по данным на отражение и прохождение. Начальное приближение итерационного процесса в
обоих случаях было выбрано v0 = const = 2,33 мм/мкс. На рис. 3 соответствие уровня серого зна-
чениям функции скорости волны в мм/мкс определяется шкалой яркости.
Как видно из рис. 3б, в схеме численного эксперимента по отраженным данным удается восста-
новить только границы объекта, что теоретически обосновано в [36], а также согласуется с числен-
ными экспериментами, приведенными в [37—39]. В данном расчете время регистрации сигнала T
было ограничено приемом отраженных сигналов только от ближней к источнику границы области
G. Как показано в [38, 39], если в расчетах учитывать отражение также от дальней от источника
границы, то это приводит к эффекту удвоения границ.
Дефектоскопия
№ 6
2019
34
Е.Г. Базулин, А.В. Гончарский, С.Ю. Романов, С.Ю. Серёжников
а
б
в
2,44
2,38
10
10
10
2,32
20
20
20
v, мм/мкс
мм
10
20
мм
10
20
мм
10
20
Рис. 3. Модельные расчеты:
а — фантом; б — реконструированное изображение в схеме на отражение; в — реконструированное изображение в схеме на отражение
и прохождение.
Скорость внутри области G, восстановленная в модели на отражение, получилась такая же как
в окружающей среде v0 = 2,33 мм/мкс. Как видно из рис. 3в, схема эксперимента с данными на
отражение и прохождение, позволяет достаточно хорошо восстанавливать границы и с высокой
точностью скорость внутри объекта. Восстановленная скорость внутри области G составила
2,41 мм/мкс, что отличается на ~1,5 % от заданной. Форма области G на рис. 3в воспроизводится
не совсем точно. Артефакты на изображении связаны, прежде всего, с тем, что объект контроля
зондируется не со всех сторон, а с малого набора ракурсов — только в вертикальном и горизон-
тальном направлениях. Это видно из результатов модельных расчетов, приведенных на рис. 4, где
использовались дополнительные ракурсы зондирования объекта через каждые 22,5 град. Артефакты
на изображении исчезли, и форма области G стала кругом. Однако проведение реального физиче-
ского эксперимента с дополнительными ракурсами зондирования требует значительного усложне-
ния стенда для проведения измерений. Как показано на численных экспериментах в [4, 38, 39],
предлагаемые томографические методы при полноракурсном зондировании имеют разрешение
менее длины волны центральной частоты при шуме в измерениях 5-10 %.
2,44
2,38
10
2,32
20
мм
10
20
v, мм/мкс
Рис. 4. Модельные расчеты. Реконструированное изображение в схеме на отражение и прохождение при добавлении
зондирования через каждые 22,5 град.
5. ПОСТАНОВКА МОДЕЛЬНОГО ЭКСПЕРИМЕНТА УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ
В ТВЕРДОМ ТЕЛЕ
В нашем эксперименте использовалось две линейные эквидистантные АР, содержащие по 32
одинаковых приемно-излучающих пьезоэлемента. Центральная частота излучаемого импульса
решеток 5 МГц, размер активного пьезоэлемента 0,5 мм и зазор между элементами 0,1 мм. Ширина
лепестка диаграммы направленности каждого элемента в эксперименте составила 50—60 град.
Малый размер пьезоэлемента обеспечивает регистрацию сигнала с шагом, сравнимым с длиной
волны в эксперименте.
Дефектоскопия
№ 6
2019
Обратные задачи ультразвуковой томографии в неразрущающем контроле...
35
Для модельного эксперимента использована следующая простейшая схема объекта контроля.
В качестве объекта контроля выбран брусок в виде вытянутого вдоль оси Z параллелепипеда, кото-
рый имеет квадратное сечение в плоскости XY. Размер стороны квадрата 20 мм, размер бруска
вдоль оси Z — 40 мм. В бруске вдоль оси Z просверлено цилиндрическое отверстие. В это отвер-
стие вставляется цилиндрический вкладыш из другого материала. При проведении экспериментов
четыре АР располагались на боковой поверхности бруска в плоскости XY при некотором фиксиро-
ванном z = z0. Активные элементы АР имеют ширину 0,5 мм и длину около 10 мм и располагались
длинной стороной вдоль оси Z. При такой геометрии эксперимента можно считать оправданным
предположение о том, что элементы излучают в плоскости XY цилиндрическую волну через
цилиндрический брусок. Это приближение позволяет использовать двумерную модель задачи по
реконструкции сечения бруска в плоскости z = z0, то есть объект контроля — квадрат, а вкладыш
представляет собой круг.
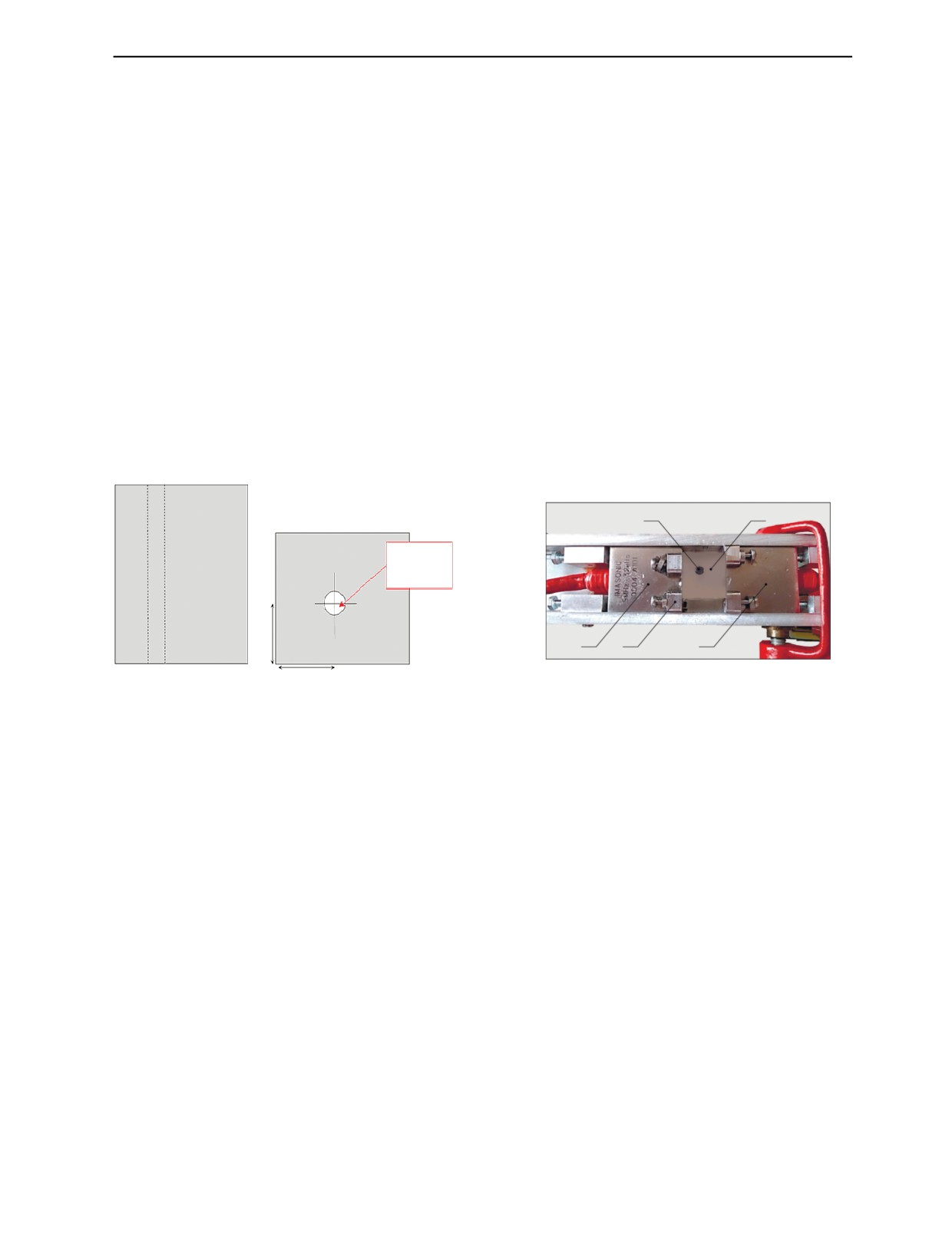
Поверхность цилиндрического вкладыша и отверстия должны быть максимально гладкие для
уменьшения отражения от них. В качестве контактной жидкости между вкладышем и стенкой
отверстия бруска использовался глицерин. Эскиз образца со сквозным отверстием приведен на
рис. 5. Было изготовлено два бруска: из рексолита и плексигласа. Выбор материалов объяснялся
хорошим согласованием акустических параметров с антенными решетками, что позволило полу-
чать короткие импульсы длиной 2-3 периода в объектах контроля. Акустические параметры в этих
материалах таковы, что длина волны на частоте 5 МГц составляет порядка 0,5 мм. Таким образом,
длина стороны бруска составляет порядка 40 длин волн.
а
4
3
б
Сквозное
отверстие
4 мм
8
1
5
2
8
Рис. 5. Эскиз образца со сквозным отверстием:
Рис. 6. Фото стенда для проведения измерений.
а — вертикальное сечение; б — горизонтальное сечение.
Для проведения измерений был собран стенд (рис. 6) для фиксации АР номер 1 и 2 на поверх-
ности образца 3. Образец со вставкой 4 устанавливается с помощью фиксаторов 5 и может пово-
рачивать на 90 град для проведения экспериментов на других сторонах бруска. При повороте
образца на 90 град по часовой стрелке АР номер 1 станет называться АР номер 3, а АР номер 2
станет называться АР номер 4 (см. рис. 1).
Для проведения экспериментов по УЗК в твердом теле использовали ультразвуковой многока-
нальный дефектоскоп АВГУР-АРТ фирмы ООО «НПЦ «ЭХО+» (Россия) в комплектации с управ-
ляющим компьютером и антенными решетками фирмы IMASONIC (Франция). Для уменьшения
уровня белого шума более чем на 12 дБ измерения сигналов проводили 20 раз с последующим
усреднением и частотной фильтрацией в полосе от 1 до 8 МГц.
6. РЕКОНСТРУКЦИЯ СКОРОСТНОГО РАЗРЕЗА ПО РЕЗУЛЬТАТАМ МОДЕЛЬНЫХ
ЭКСПЕРИМЕНТОВ
Проведем сравнение результатов решения обратной задачи ультразвуковой томографии по
реальным сигналам модельных экспериментов и по данным, полученным из численного решения
прямой задачи. Схема и значения параметров физических экспериментов максимально совпадают
с численным экспериментом, описанным в разделе 4.
В эксперименте использовали бруски с просверленным отверстием диаметром 4 мм. В первом
эксперименте в брусок из рексолита был вставлен цилиндрический вкладыш из эбонита. Скорость
продольной волны в рексолите (2,33 км/с) ниже, чем в эбоните (2,4 км/с). Во втором эксперименте
Дефектоскопия
№ 6
2019
36
Е.Г. Базулин, А.В. Гончарский, С.Ю. Романов, С.Ю. Серёжников
в брусок из плексигласа был вставлен вкладыш из капролона. Скорость продольной волны в плек-
сигласе (2,7 км/с) выше, чем в капролоне (2,64 км/с). Различие скорости в бруске и вкладыше не
превышало 5 %. Длина волны центральной частоты импульса около 0,5 мм (частота 5 МГц), раз-
мер расчетной области — 20×20 мм, размер разностной сетки — 700×700 точек. В эксперименте
использовалось 100 положений источников, располагавшихся на каждой стороне прямоугольника,
как показано на рис. 1, c шагом 0,6 мм. Аналогично располагались приемники.
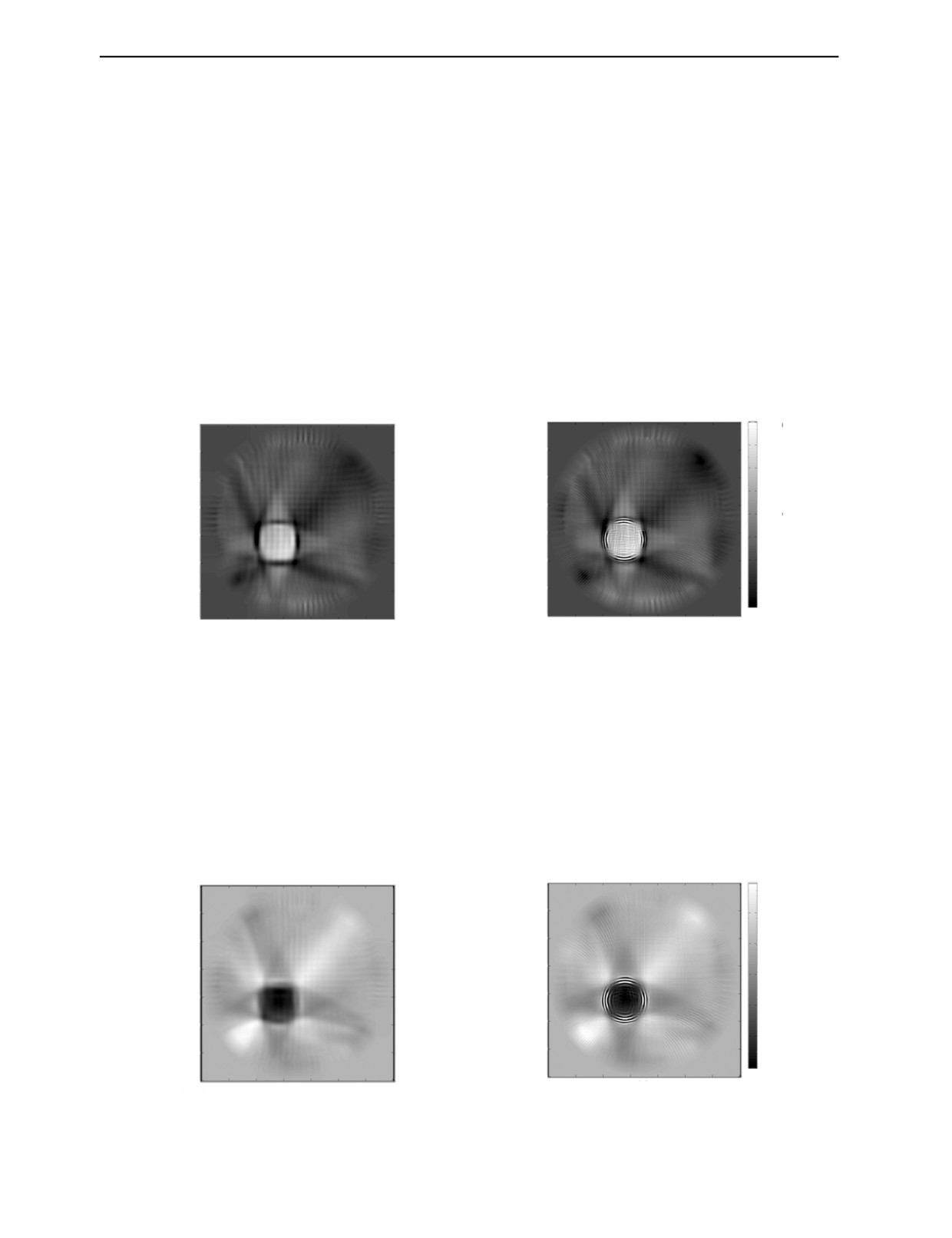
На рис. 7a приведен восстановленный cкоростной разрез в первом эксперименте (рексолит-
эбонит) при проведении расчетов в схеме эксперимента на рис. 1 на прохождение. В итерационном
процессе начальное приближение скорости в среде было выбрано v0 = const = 2,33 мм/мкс.
На рис. 7б приведено восстановленное изображение в схеме на прохождение и отражение после
40 итераций. На рис. 8a приведен восстановленный cкоростной разрез во втором эксперименте
(плексиглас-капролон) в схеме на прохождение. Начальное приближение скорости в среде было
выбрано v0 = const = 2,7 мм/мкс. На рис. 8б приведено восстановленное изображение в схеме на
прохождение и отражение после 40 итераций. И в первом, и во втором экспериментах после
40 итераций функционал невязки (2), практически перестал уменьшаться, а восстановленное изо-
бражение визуально перестало приближаться к точному.
а
б
2,39
2,35
10
10
2,31
20
20
v, мм/мкс
мм
10
20
мм
10
20
Рис. 7. Скоростные разрезы, восстановленные в образце рексолита с эбонитовой вставкой:
а — по данным на прохождение; б — по данным на прохождение и отражение.
Как видно из рис. 7 и 8, структура восстановленных изображений, полученных в модельных
экспериментах, похожа на структуру восстановленного изображения в численных эксперимен-
тах (см. рис. 3). Восстановленная в модельном эксперименте скорость продольной волны во
вкладыше из эбонита равна 2,38-2,39 мм/мкс, во вкладыше из капролона — 2,63-2,64 мм/мкс.
Артефакты на рис. 7, 8 и 3 имеют похожую структуру и, как отмечено в разделе 4, связаны, пре-
жде всего, с малым набором ракурсов зондирования. Волновые эффекты вокруг вставок на
рис. 7б, 8б имеют характерный размер порядка длины волны и связаны погрешностями в экс-
периментальных данных.
а
б
2,72
2,68
10
10
2,62
20
20
v, мм/мкс
мм
10
20
мм
10
20
Рис. 8. Скоростные разрезы, восстановленные в образце плексигласа со вставкой из капролона:
а — по данным на прохождение; б — по данным на прохождение и отражение.
Дефектоскопия
№ 6
2019
Обратные задачи ультразвуковой томографии в неразрущающем контроле...
37
Предложенный метод решения обратных задач волновой томографии и предложенная схема
проведения томографического эксперимента, в отличие от традиционных методов УЗК, позволяют
по данным на прохождение и отражение не только локализовать неоднородность, найти ее грани-
цу, но и определить скорость в ней с точностью около 1 % в центральной части неоднородности.
Знание скорости внутри неоднородности чрезвычайно важно в задачах УЗК. К таким задачам
можно отнести задачу контроля сварных швов, задачу контроля смесевого соотношения компонен-
тов в цилиндрических объектах при разработке изделий из полимерных материалов, когда разные
компоненты имеют разные скорости.
В задаче контроля сварных швов различие в скорости звука в основном металле и в сварном
соединении может составлять порядка 10 %. Кроме того, и в самом сварном шве скорость может
меняться в пределах 10 %. Поэтому для корректного описания внутренней структуры необходимо
восстанавливать скорость хотя бы с точностью 1 %. Заметим также, что когерентные методы вос-
становления дефектов (томографические, SAFT) эффективно работают в случае, когда ошибки
расчета времен распространения импульсов меньше чем четверть периода центральной частоты.
Только в этом случае происходит эффективное когерентное накопление сигнала. Исходя из этих
требований, можно оценить точность определения скорости звука в сварном соединении как вели-
чину порядка 1 % при характерном размере шва ~40 мм и частотах ~5 МГц. Более того, незнание
скорости внутри неоднородного объекта может приводить к тому, что восстановленные по отра-
женным данным границы и отражатели окажутся смещенными относительно реального их залега-
ния, будут искажены размеры и тип отражателя. В настоящее время в УЗК изображение восстанав-
ливается, как правило, в предположении, что объект контроля однородный.
В настоящей статье выбраны простые объекты для реконструкции, использовано волновое
приближение без учета поглощения. Гораздо более сложные объекты, в которых изменение скоро-
сти в пределах объекта составляло около ±20 %, в моделях с учетом поглощения использовались
авторами в численных экспериментах по решению задач ультразвуковой томографии в приложе-
нии к медицине [28, 37—39]. Однако цель статьи не просто провести численные эксперименты, а
решить обратную задачу по экспериментальным данным реального физического эксперимента и
сравнить его с численным экспериментом.
Расчеты проводили с использованием суперкомпьютера
«Ломоносов-2» МГУ имени
М.В. Ломоносова [40]. Время вычисления 40 итераций составило около 1 ч. Вычисления прово-
дили на 100 вычислительных ядрах CPU, что составляет менее 0,1 % мощности суперкомпьютера.
Для решения рассматриваемых обратных задач можно использовать любые высокопроизводитель-
ные вычислительные системы. Наиболее эффективно использование кластеров на графических
картах.
Исследование выполнено за счет гранта Российского научного фонда (проект № 17—11—
01065) в Московском государственном университете имени М.В. Ломоносова. Работа выполнена с
использованием оборудования Центра коллективного пользования сверхвысокопроизводительны-
ми вычислительными ресурсами МГУ имени М.В. Ломоносова.
7. ЗАКЛЮЧЕНИЕ
В статье на экспериментальных данных апробированы разработанные авторами математиче-
ские методы решения обратных томографических задач реконструкции скоростного разреза для
УЗК в скалярном волновом приближении. В отличие от хорошо изученных в ультразвуковой
дефектоскопии методов восстановления границ неоднородностей по отраженным данным, в
настоящей работе на рассмотренных экспериментах продемонстрировано, что при использовании
проходящих волн предлагаемые методы позволяют находить не только границы включений, но и
функцию скорости внутри образца. В рассмотренных экспериментах используются только про-
дольные волны, отсекаемые по времени прихода. Для этих экспериментов показана состоятель-
ность при решении обратной задачи использования скалярной волновой модели для продольных
волн. Разработанные авторами методы решения нелинейной обратной задачи томографии требуют
значительного объема вычислений, которые могут быть реализованы только на высокопроизво-
дительных вычислительных системах.
В работе рассмотрен простейший эксперимент, демонстрирующий принципиальные возмож-
ности метода на реальных данных. В дальнейших работах авторы предполагают усложнить экс-
перимент, увеличив количество ракурсов зондирования и добавив в объект контроля два вкладыша
из разных материалов. Планируется восстановить распределение коэффициента поглощения в
объекте контроля.
Дефектоскопия
№ 6
2019
38
Е.Г. Базулин, А.В. Гончарский, С.Ю. Романов, С.Ю. Серёжников
СПИСОК ЛИТЕРАТУРЫ
1. Natterer F. Possibilities and limitations of time domain wave equation imaging / Contemporary
Mathematics. V. 559. Providence : AMS, 2011. P. 151—162.
2. Бейлина Л., Клибанов М.В., Кокурин М.Ю. Адаптивность и релаксация для некорректных задач и
глобальная сходимость для коэффициентной обратной задачи // Проблемы математического анализа.
2010. № 46. С. 3—44.
3. Goncharsky A.V., Romanov S.Y. Supercomputer technologies in inverse problems of ultrasound
tomography // Inverse Probl. 2013. V. 29. № 7. P. 075004.
4. Goncharsky A.V., Romanov S.Y. Iterative methods for solving coefficient inverse problems of wave
tomography in models with attenuation // Inverse Problems. 2017. V. 33. № 2. P. 025003.
5. Pratt R.G. Seismic waveform inversion in the frequency domain, Part 1: Theory and verification in a
physical scale model // Geophysics. 1999.V. 64. № 3. P. 888—901.
6. Virieux J., Operto S. An overview of full-waveform inversion in exploration geophysics // Goephysics.
2009. V. 74. № 6. P. WCC1—WCC26.
7. Blitz J., Simpson G. Ultrasonic Methods of Non-destructive Testing. London: Springer, 1995.
8. Langenberg K.-J., Marklein R., Mayer K. Ultrasonic Nondestructive Testing. CRC Press, 2012.
9. Hall T.E., Doctor S.R., Reid L.D., Littlield R.J., Gilber R.W. Implementation of real-time ultrasonic
SAFT system for inspection of nuclear reactor components // Acoustical Imaging. 1987. V. 15. P. 253—266.
10. Mayer K., Markelein R., Langenberg K.J., Kreutter T. Three-dimensional imaging system based on
Fourier transformation synthetic aperture focusing technique // Ultrasonics. 1990. V. 28. P. 241—255.
11. Schmitz V., Chakhlov S., Müller W. Experiences with synthetic aperture focusing in the field //
Ultrasonics. 2000. V. 38. P. 731—738.
12. Jensen J.A., Nikolov S.I., Gammelmark K.L., Pedersen M.H. Synthetic aperture ultrasound imaging //
Ultrasonics. 2006. V. 44. P. 5—15.
13. Базулин Е.Г. Сравнение систем для ультразвукового неразрушающего контроля, использующих
антенные решетки или фазированные антенные решетки // Дефектоскопия. 2013. № 7. С. 51—74.
14. Базулин Е.Г., Садыков М.С., Коновалов Д.А. Метод конечных разностей во временной области.
Ч. 2. Расчет эхосигналов в анизотропных неоднородных материалах, структурный шум // Дефектоскопия.
2018. № 8. С. 3—10.
15. Самокрутов А.А., Шевалдыкин В.Г. Ультразвуковая томография металлоконструкций методом
цифровой фокусировки антенной решетки // Дефектоскопия. 2011. № 1. С. 21—38.
16. Качанов В.К., Соколов И.В., Тимофеев Д.В., Туркин М.В., Шалимова Е.В. Обнаружение отража-
ющих плоскостей при ультразвуковой томографии строительных конструкций из бетона
//
Дефектоскопия. 2010. № 5. С. 36—44.
17. Bellis C., Bonnet M. Crack identification by 3D time-domain elastic or acoustic topological sensitivity
// C. R. Mecanique. 2009. V. 337. № 3. P. 124—130.
18. Lubeigt E., Mensah S., Rakotonarivo S., Chaix J-F., Baquѐ F., Gobillot G. Topological imaging in
bounded elastic media // Ultrasonics. 2017. April. V. 76. P. 145—153.
19. Dominguez N., Gibiat V. Non-destructive imaging using the time domain topological energy //
Ultrasonics. 2010. V. 50. № 3. P. 367—372.
20. Rodriguez S., Deschamps M., Castaings M., Ducasse E. Guided wave topological imaging of isotropic
plates // Ultrasonics. 2014. V.
54.
№ 7. P. 1880—1890.
21. Metwally K., Lubeigt E., Rakotonarivo S., Chaix JF., Baqué F., Gobillot G., Mensah S. Weld inspection
by focused adjoint method // Ultrasonics. 2018. February. V. 83. P. 80—87.
22. Bachmann E., Jacob X., Rodriguez S., Gibiat V. Three-dimensional and real-time two-dimensional
topological imaging using parallel computing // The Journal of the Acoustical Society of America. 2015.
V. 138. № 3. P. 1796.
23. Kocur G.K., Saenger E.H., Grosse C.U., Vogel T. Time reverse modeling of acoustic emissions in a
reinforced concrete beam // Ultrasonics. 2016. V. 65. P. 96—104.
24. Seidl R., Rank E. Iterative time reversal based flaw identification // Computers & Mathematics with
Applications. 2016. August. V. 72. № 4. P. 879—892.
25. Rao J., Ratassepp M., Fan Z. Guided Wave Tomography Based on Full Waveform Inversion // IEEE
Trans Ultrason Ferroelectr Freq Control. 2016. V. 63. № 5. P. 737—745.
26. Кошевой В.В., Кривин Е.В., Муравьев А.М., Романишин И.М. Особенности ультразвуковой томо-
графии толстолистовых изделий // Дефектоскопия. 2004. № 7. С. 3—16.
27. Солдатов А.А., Сорокин П.В., Солдатов А.И., Костина М.А., Шульгина Ю.В. Малоракурсная
акустическая томография при теневом контроле антенными решетками // Дефектоскопия. 2018. № 7.
С. 3—8.
28. Goncharsky A.V., Romanov S.Y., Seryozhnikov S.Y. Inverse problems of 3D ultrasonic tomography with
complete and incomplete range data // Wave Motion, 51. 2014. № 3. P. 389—404.
29. Goncharsky A.V., Romanov S.Y. Inverse problems of ultrasound tomography in models with attenuation
Дефектоскопия
№ 6
2019
Обратные задачи ультразвуковой томографии в неразрущающем контроле...
39
// Phys. Med. Biol. 2014. V. 59. № 8. P. 1979—2004.
30. Гончарский А.В., Романов С.Ю. О двух подходах к решению коэффициентных обратных задач
для волновых уравнений // ЖВММФ. 2012. Т. 52. № 2. С. 263—269.
31. Гончарский А.В., Романов С.Ю., Серёжников С.Ю. Низкочастотная трехмерная ультразвуковая
томография // Доклады РАН. 2016. Т. 468. № 3. С. 268—271.
32. Romanov S. Optimization of Numerical Algorithms for Solving Inverse Problems of Ultrasonic
Tomography on a Supercompute // Communications in Computer and Information Science. 2017. V. 793.
P. 67—79.
33. Engquist B., Majda A. Absorbing boundary conditions for the numerical simulation of waves // Math.
Comput. 1977. V. 31. P. 629—651.
34. Goncharsky A., Seryozhnikov S. The Architecture of Specialized GPU Clusters Used for Solving the
Inverse Problems of 3D Low-Frequency Ultrasonic Tomography // Communications in Computer and
Information Science. 2017. V. 793. P. 363—375.
35. Bazulin E.G., Goncharsky A.V., Romanov S.Y., Seryozhnikov S.Y. Parallel CPU- and GPU-algorithms
for inverse problems in nondestructive testing // Lobachevskii Journal of Mathematics. 2018. V. 39. № 4.
P. 486—493.
36. Natterer F. Incomplete data problems in wave equation imaging // Inverse Problems and Imaging.
2010. V. 4, № 4. P. 685—691.
37. Гончарский А.В., Романов С.Ю., Серёжников С.Ю. Задачи волновой томографии с неполным
диапазоном данных // Выч. методы и программ. 2014. Т. 15. № 2. С. 274—285.
38. Romanov S. Исследование томографических схем низкочастотной ультразвуковой диагностики
на суперкомпьютерах // CEUR Workshop Proceedings. 2015. V. 1482. P. 199—205.
39. Goncharsky A.V., Romanov S.Y., Seryozhnikov S.Y. A computer simulation study of soft tissue
characterization using low-frequency ultrasonic tomography // Ultrasonics. 2016. V. 67. P. 136—150.
40. Центр коллективного пользования сверхвысокопроизводительными вычислительными ресурса-
Дефектоскопия
№ 6
2019