УДК 620.179.162
ПРИМЕНЕНИЕ АЛГОРИТМА РАСЧЕТА В ЧАСТОТНОЙ ОБЛАСТИ
ДЛЯ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ СЛОИСТО НЕОДНОРОДНЫХ СРЕД
С ИСПОЛЬЗОВАНИЕМ МАТРИЧНЫХ АНТЕННЫХ РЕШЕТОК
© 2019 г. Д.О. Долматов1,*, Д.А. Седнев1,**, А.Н. Булавинов2,***, Р.В. Пинчук2,****
1 Нацианальный исследовательский Томский политхнический университет,
Россия 634040 Томск, ул. Ленина, 30
2 ACS-Solulitions GmbH, 66123, Саарбрюккен, Science Pk. 2, Германия
E-mail: *dolmatovdo@tpu.ru; **sednev@tpu.ru; ***andrey.bulavinov@acs-international.com;
****roman.pinchuk@acs-international.com
Поступила в редакцию 28.02.2019; после доработки 07.05.2019
Принята к публикации 24.05.2019
Для обеспечения высокой скорости получения синтезированных изображений с использованием матричных антен-
ных решеток (АР) в системах промышленной ультразвуковой томографии требуются вычислительно-эффективные
алгоритмы пространственно-временной обработки. В этой связи большой интерес представляют алгоритмы с расчетами
в частотной области, основанные на алгоритме быстрого преобразования Фурье. При этом разрабатываемые алгоритмы
должны обеспечивать высокое качество получаемых результатов при различных условиях проведения ультразвуковой
томографии. В случае ультразвуковой томографии многослойных структур одним из факторов, серьезно снижающих
эффективность алгоритма, является непараллельность, а в предельном случае криволинейность границ слоев объекта
контроля относительно плоскости сканирования. В данной статье предложен алгоритм расчета трехмерных томографи-
ческих изображений в частотной области с использованием матричных фазированных решеток с компенсацией наклона
объекта контроля относительно плоскости сканирования при использовании иммерсионного контакта. Эффективность
предложенного метода подтверждается экспериментально.
Ключевые слова: ультразвуковой неразрушающий контроль, ультразвуковая томография, матричные фазированные
антенные решетки, метод синтетической фокусировки апертуры.
DOI: 10.1134/S0130308219070029
ВВЕДЕНИЕ
Разработка и внедрение в практику ультразвукового неразрушающего контроля систем томогра-
фии направлено на решение задачи определения размеров и формы дефектов в объектах контроля с
высокой разрешающей способностью. В таких системах задача решается за счет получения синтези-
рованных изображений внутренней структуры объекта контроля с использованием алгоритмов про-
странственно-временной обработки зарегистрированных ультразвуковых эхосигналов.
Применение в системах ультразвуковой томографии АР получило широкое распространение
по причине того, что применение таких преобразователей позволяет получать синтезированные
изображения внутренней структуры объектов контроля с высоким разрешением. Это достигается
за счет использования соответствующих алгоритмов пространственно-временной обработки в
совокупности с применением особых режимов зондирования объекта контроля и регистрации
ультразвуковых эхосигналов. На сегодняшний день наибольшее распространение получил алго-
ритм C-SAFT [1—3], зарубежными аналогами которого является Total Focusing Method, Sampling
Phased Array и Inverse Wavefield Extrapolation [4—7]. В качестве режима регистрации данных во
всех этих алгоритмах используется режим перебора всех возможных комбинаций индивидуально
излучающих и принимающих элементов АР (в англоязычной литературе такой режим называют
Full Matrix Capture). Необходимо отметить, что все рассмотренные выше алгоритмы базируются
на расчетах во временной области и связаны с интенсивными расчетами [8].
Актуальным вопросом развития систем ультразвуковой томографии является повышение каче-
ства и достоверности получаемых синтезированных изображений. В этой связи большой интерес
представляет использование в подобных системах матричных АР. Преимуществом их применения
перед широко используемыми на сегодняшний день линейными АР является возможность полу-
чения трехмерного синтезированного изображения в одной позиции ультразвукового преобразова-
теля и более высокая разрешающая способность полученных изображений. Однако использование
матричных АР связано с необходимостью трехмерной пространственно-временной обработки
большого объема ультразвуковых данных, что серьезным образом ограничивает возможность
получения синтезированных изображений в режиме реального времени. Таким образом, суще-
Применение алгоритма расчета в частотной области для ультразвуковой томографии...
13
ствует потребность в разработке и внедрении алгоритмов, обеспечивающих высокую скорость
получения синтезированных изображений трехмерного пространства. В этой связи перспективны-
ми являются алгоритмы с расчетами в частотной области, которые базируются на использовании
алгоритма быстрого преобразования Фурье [9]. В ряде работ был предложен алгоритм простран-
ственно-временной обработки с расчетами в частотной области для ультразвуковой томографии с
использованием АР, основанный на методе фазового сдвига и интерполяции Столта [10, 11]. Про-
верка его эффективности была осуществлена в рамках проведения ультразвукового контроля и
томографической обработки данных с использованием матричных и линейных АР [12—14]. Рас-
смотренный алгоритм может применяться как в случае проведения ультразвуковой томографии с
использованием иммерсионного акустического контакта, так и в случае контроля многослойных
объектов контроля. Тем не менее, одним из факторов, серьезно снижающим качество получаемых
изображений на практике, является непараллельность плоскости ультразвукового сканирования
относительно границ слоев объекта контроля, что требует модификации предложенного ранее
алгоритма.
МЕТОДИКА ПРОВЕДЕНИЯ ИССЛЕДОВАНИЯ
Описание алгоритма расчета в частотной области для ультразвуковой томографии
многослойных структур с использованием АР с компенсацией непараллельности плоско-
сти сканирования относительно границ слоев объекта контроля.
Частным случаем томографической реконструкции многослойных сред является использова-
ние иммерсионного акустического контакта при ультразвуковом контроле объектов сложной
формы. Рассмотрим случай выполнения трехмерной ультразвуковой томографии с использова-
нием матричной фазированной решетки. Регистрация ультразвуковых сигналов при этом осу-
ществляется в режиме FMC. Двухмерное сканирование объекта и сбор ультразвуковых данных
производятся в иммерсионном контакте. В таком случае набор сигналов, регистрируемых эле-
ментами решетки, можно представить в виде функции P(t, x, y, z), где t — время; x, y, z — коор-
динаты средней точки между элементом АР, который является источником ультразвука, и эле-
ментом АР, принимающим отраженный эхосигнал. Ультразвуковое сканирование осуществляет-
ся в одной плоскости, следовательно, z = const. Расстояние между соседними координатами x и
y является постоянным и равно соответственно ∆x и ∆y.
Рассматриваемый алгоритм состоит из следующих действий:
1. Компенсация наклона поверхности объекта контроля относительно плоскости сканирования
с использованием метода фазового сдвига.
2. Экстраполяция акустического поля на границу раздела вода — объект контроля методом
фазового сдвига.
3. Получение синтезированного изображения с использованием интерполяции Столта с после-
дующим обратным преобразованием Фурье.
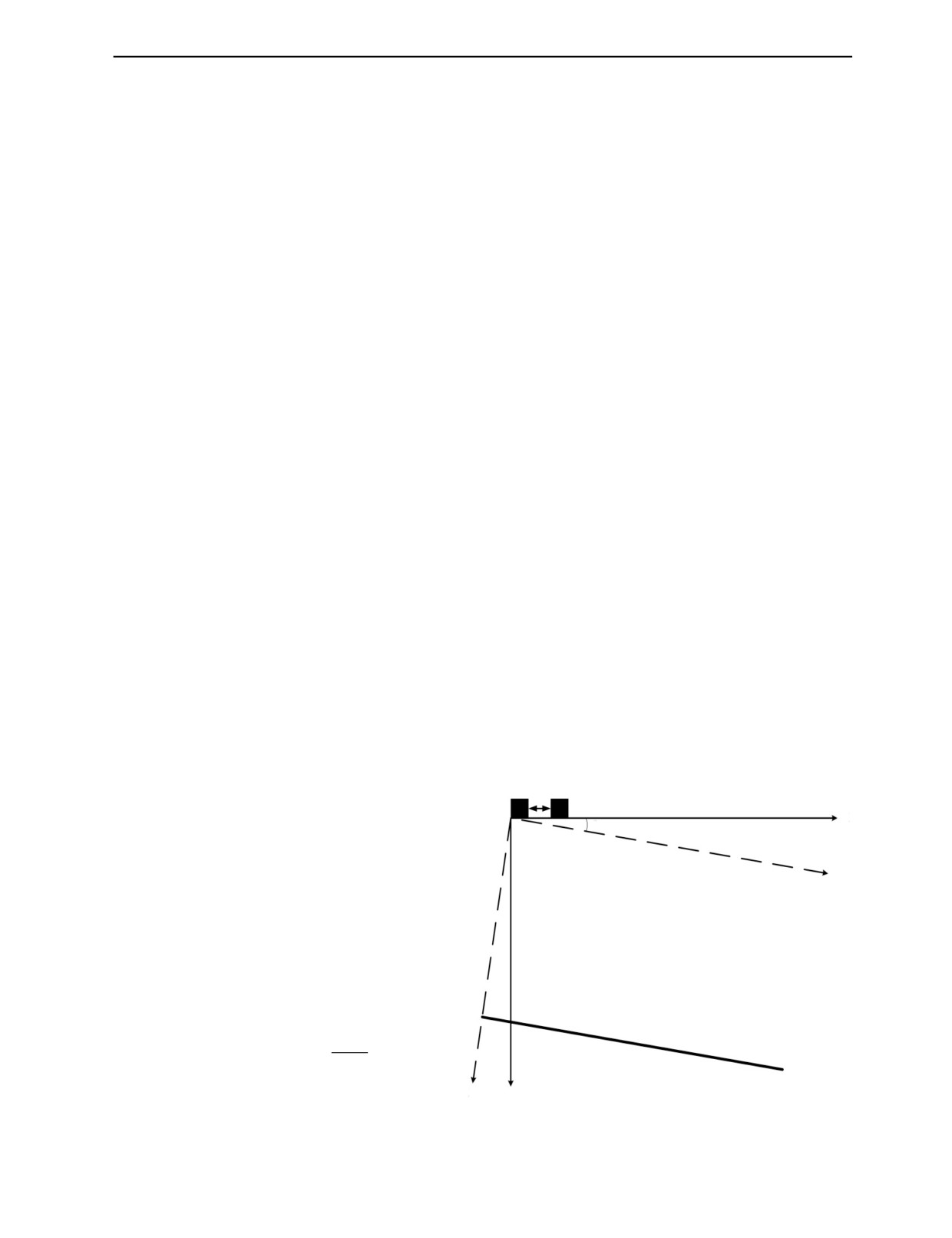
Рассмотрим частный случай, при кото-
Δx
ром объект контроля наклонен относительно
X
плоскости сканирования по оси Х на угол θ
θ
(рис. 1). Тогда задача компенсации наклона
плоскости сканирования относительно
поверхности объекта контроля заключается
X′
в получении из функции P(t, x, y, z) функции
Иммерсионная
P(t, x′, y, z′), при этом ось Х′ должна быть
жидкость
параллельна границам образца. Задача ком-
пенсации такого наклона может быть решена
путем экстраполяции функции P(t, x, y, z) с
использованием метода фазового сдвига,
при этом глубина осуществляемого сдвига
будет зависеть от координаты x функции
∆z = ∆x ⋅ n ⋅ tan(θ), n = 1... N,
(1)
Объект контроля
Z′
Z
где N — общее количество отсчетов по
оси Х.
Рис. 1. Компенсация наклона объекта контроля относительно
оси Х.
Дефектоскопия
№ 7
2019
14
Д.О. Долматов, Д.А. Седнев, А.Н. Булавинов, Р.В. Пинчук
Таким образом, решение поставленной задачи включает в себя:
1. Трехмерное преобразование Фурье функции P(t, x, y, z)
∞
P(ω,k
,
k z)
=
p t,x,y,z)⋅exp[-i(k
x+k
y
−ωt)]dx dy dt,
(2)
x
y
∫∫∫
x
y
−∞
где ω — угловая частота;
k
,k
,
k
— компоненты волнового вектора.
x
y
z
2. Экстраполяция функции
P ω
k
x
,k
y
, z)
на глубину
∆z
n
= n∆x
tan(θ)
P ω
k
,k
,
z +∆z
)
=P ω
k
,
k z)⋅exp[i(k
∆z
)],
(3)
x
y
n
x
y
z
n
где компонента kz волнового вектора выражается как
1/2
2
ω ω
2
2
k
=-
-k
−k
,
(4)
z
2
x
y
|
ω|
c
1
где
c
— половина скорости звука в иммерсионной жидкости.
1
3. Обратное преобразование Фурье и получение откорректированной функции P(t, x′, y′, z′)
x′
∞
P t,x,y,z
+∆z
)
=
P(ω,k
,k
, z
+∆z
)exp[i(k
x+k
y
t)]
+ω ωdk
dk
,
(5)
n
∫∫∫
x
y
n
x
y
x
y
−∞
P t,
x
n
′ y,
z′)
=P t,
n
x y,z + ∆z
n
).
(6)
Результатом применения предложенного подхода является функция P(t, x′, y, z′), скорректиро-
ванная относительно поверхности объекта контроля по оси X, где
x
x′ =
(7)
cosθ
На следующем шаге метод фазового сдвига используется для экстраполяции скорректирован-
ного акустического поля P(t, x′, y, z′) на границу раздела иммерсионная жидкость — объект кон-
троля. Прежде всего, к данной функции применяется преобразование Фурье функции P(t, x′, y, z′)
и экстраполяция методом фазового сдвига:
∞
P(ω,k
′
,
k
, z′)
=
p t,
x′ y,z′)⋅exp[-i(k
′
x′+k
y
−ωt)]dx′dy dt,
(8)
x
y
∫∫∫
x
y
−∞
P ω
k
′,k
, z′+ ∆z′
)
=P ω
k
′
,k
, z′)⋅exp[i(
k
′∆z′)],
(9)
x
y
x
y
z
где Δz′ — толщина слоя иммерсионной жидкости.
Для получения синтезированного изображения с использованием преобразования Столта тре-
буется трехмерное преобразование Фурье функции P(t, x, y, z '+ ∆z) аналогично (2). Для реализа-
ции пространственно-временной обработки необходимо выразить угловую частоту через компо-
ненты волнового вектора
k
′
z
2
2
2
ω
(k′,
k
,
k
′
)
=-
⋅c
⋅
k′
+k
+k
′
,
(10)
x
y
z
2
(
x
y
z
)1/2
| k
′
|
z
где
c
— половина скорости продольных акустических волн в объекте контроля.
2
Таким образом, осуществляется замена переменной
ω→
k
′
,
(11)
z
Дефектоскопия
№ 7
2019
Применение алгоритма расчета в частотной области для ультразвуковой томографии...
15
2
2
′
k′
+k
k
z
x
y
dω=-
⋅c
⋅
1+
dk′
2
2
z
(12)
k
′
k′
z
z
Получение синтезированного изображения внутренней структуры объекта контроля проводит-
ся по следующей формуле:
∞
I(
x′ y,z′+∆
z)
=
P(k
′,k
,k
′, z′)⋅exp[i(k
′∆z)]⋅exp[i(k
′
x′+k
y)]dk
′
dk
dk
′,
(13)
∫∫∫
x
y
z
z
x
y
x
y
z
−∞
где:
P(k
′,k
,k
′, z′)
=A(k
′,k
,k
′)
⋅P ω
k
′,k
,k
′),k
′
,
k
, z′),
(14)
x
y
z
x
y
z
x
y
z
x
y
−1/2
2
2
k′
k
′x
+k
z
y
A(k′,k
,k
′)
=-
⋅
c
⋅1+
(15)
x
y
z
l
2
| k′
|
k′
z
z
Наклон объекта контроля относительно плоскости сканирования по двум осям является более
общим случаем и описывается двумя углами θ (наклон относительно оси X) и φ (наклон относи-
тельно оси Y). В данном случае компенсация наклона происходит аналогично и заключается в
получении функции P(t, x′, y ', z′) из функции P(t, x, y, z) , при этом оси X′ и Y′ должны быть парал-
лельны поверхности объекта контроля. Компенсацию наклона объекта контроля, пространствен-
но-временную обработку и получение синтезированного изображения можно осуществить с
использованием (1—14). Отличие заключается в зависимости координат до осуществления ком-
пенсации наклона (x, y, z) и после нее (x′, y′, z′):
∆z = n ⋅(∆x ⋅ tan(θ) + ∆y ⋅ tan(ϕ)), n = 1... N;
(16)
∆
x
∆x′
=
;
(17)
cos( )
θ
∆
y
∆y′
=
(18)
cos( )
ϕ
Экспериментальная часть.
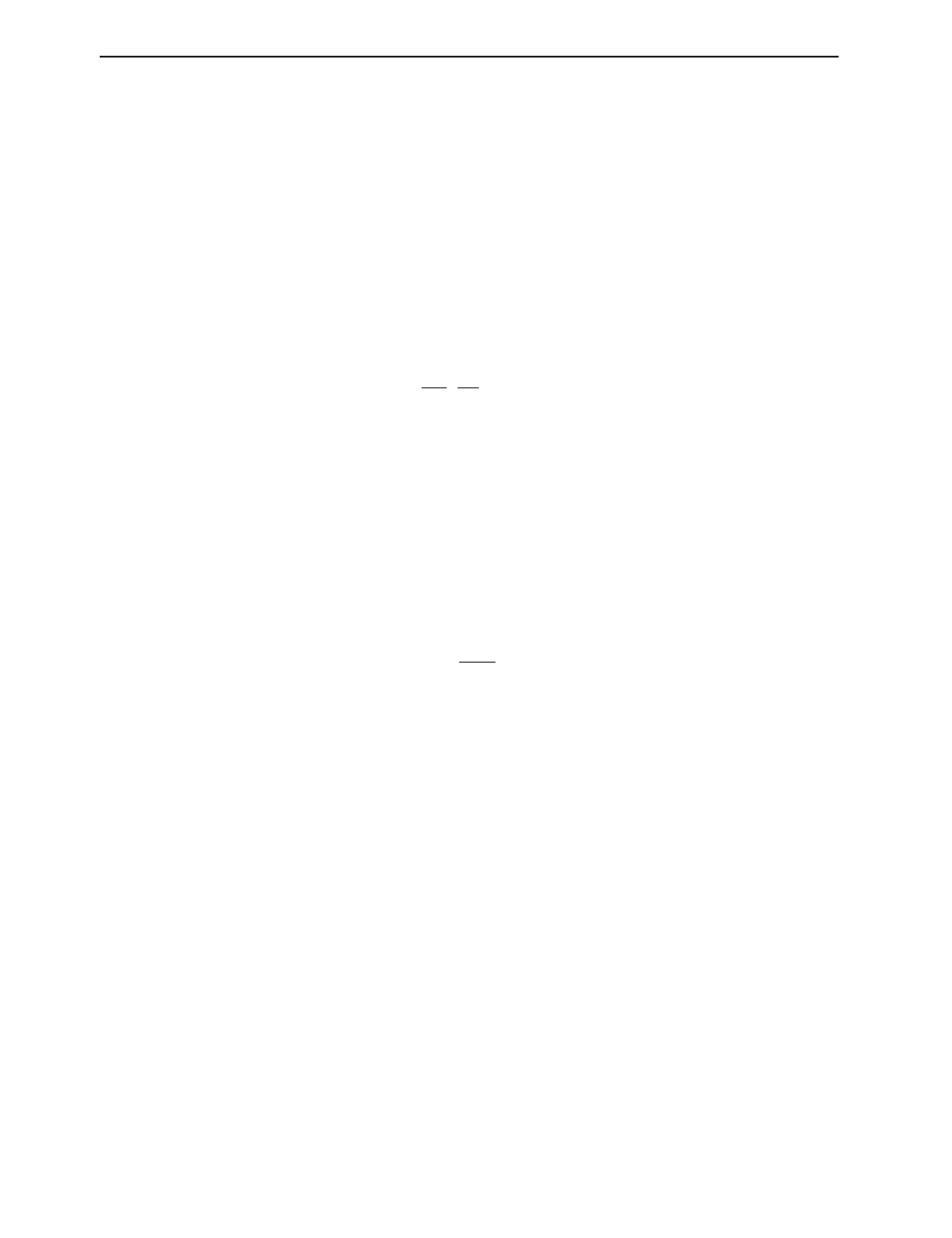
Предложенный алгоритм проверяли экспериментально. В качестве объекта контроля приме-
нялся стальной блок размерами 50×50×90 мм с тремя плоскодонными отверстиями диаметром
3 мм. Расположение плоскодонных отверстий представлено на рис. 2.
0
0
10
10
20
20
30
30
40
40
50
50
60
60
70
70
ABC
CBA
80
80
90
90
0
20
40
0
20
40
Ось X, мм
Ось Y, мм
50
40
A
30
B
C
20
10
0
0
20
40
Ось X, мм
Рис. 2. Расположение дефектов в образце.
Дефектоскопия
№ 7
2019
16
Д.О. Долматов, Д.А. Седнев, А.Н. Булавинов, Р.В. Пинчук
Таким образом, координаты дефектов следующие: А(20; 30; 80), B(25; 25; 80), C(30; 20; 80).
Во всех случаях глубина сверления плоскодонных отверстий составляла 10 мм. В рамках экс-
периментальной проверки предложенного алгоритма объект контроля был наклонен под углом
4о относительно одной из осей сканирования.
В качестве ультразвукового преобразователя применялась 64-элементная матричная АР, цен-
тральная частота каждого элемента — 5 МГц, расстояние между центрами соседних элементов
1 мм (рис. 3). Регистрация ультразвуковых данных осуществилась при режиме двойного скани-
рования работы АР и ее перемещении с шагом 1 мм.
Рис. 3. Матричная АР Doppler 5M8×8BP 1.0.
Рис. 4. Лабораторная установка.
Для регистрации ультразвуковых данных применялась лабораторная установка, основой кото-
рой является блок ультразвуковой электроники OPTUS (I-Deal Technologies GmbH) (рис. 4). Дан-
ный блок электроники имеет 128 каналов, реализующий как совмещенный режим, так режим
двойного сканирования работы АР.
Эхосигналы, полученные в результате сканирования объекта контроля, являлись исходными
данными для предложенного алгоритма, который был реализован в программном пакете Matlab
R2016b. Результатом применения алгоритма к зарегистрированным данным является синтезиро-
ванное изображение внутренней структуры объекта контроля. Для проверки качества результатов,
полученных с использованием предложенного алгоритма, проводилось их сравнение с результата-
ми, полученными при использовании алгоритма расчета во временной области при использовании
матричных решеток. Вопросы реализации такого алгоритма рассмотрены в [15].
Сравнение результатов пространственно-временной обработки с применением двух алгорит-
мов осуществлялось на основании оценки разрешения полученных изображений и затраченного
времени на получение результатов. Оценка разрешения полученных синтезированных изображе-
ний была выполнена с использованием параметра Array Performance Indicator (API) [16], который
определяется отдельно для каждого отражателя и для случая трехмерной томографии может быть
сформулирован следующим образом:
V-
6дБ
(19)
API
=
,
3
λ
где V-6дБ — объем вокруг отражателя, в которой амплитуда синтезированного изображения выше
порога в -6 дБ от максимальной амплитуды, соответствующей этому отражателю на синтезирован-
ном изображении.
Также в рамках работы оценивалось время, необходимое для получения синтезированного изо-
бражения с использованием алгоритмов расчета во временной и частотной областях. Все расчеты
в реализованных алгоритмах осуществлялись на ЭВМ с четырехядерным и восьмипоточным про-
цессором Intel Core i7-4790K и ОЗУ 16 Гб.
РЕЗУЛЬТАТЫ ИССЛЕДОВАНИЯ И ИХ ОБСУЖДЕНИЕ
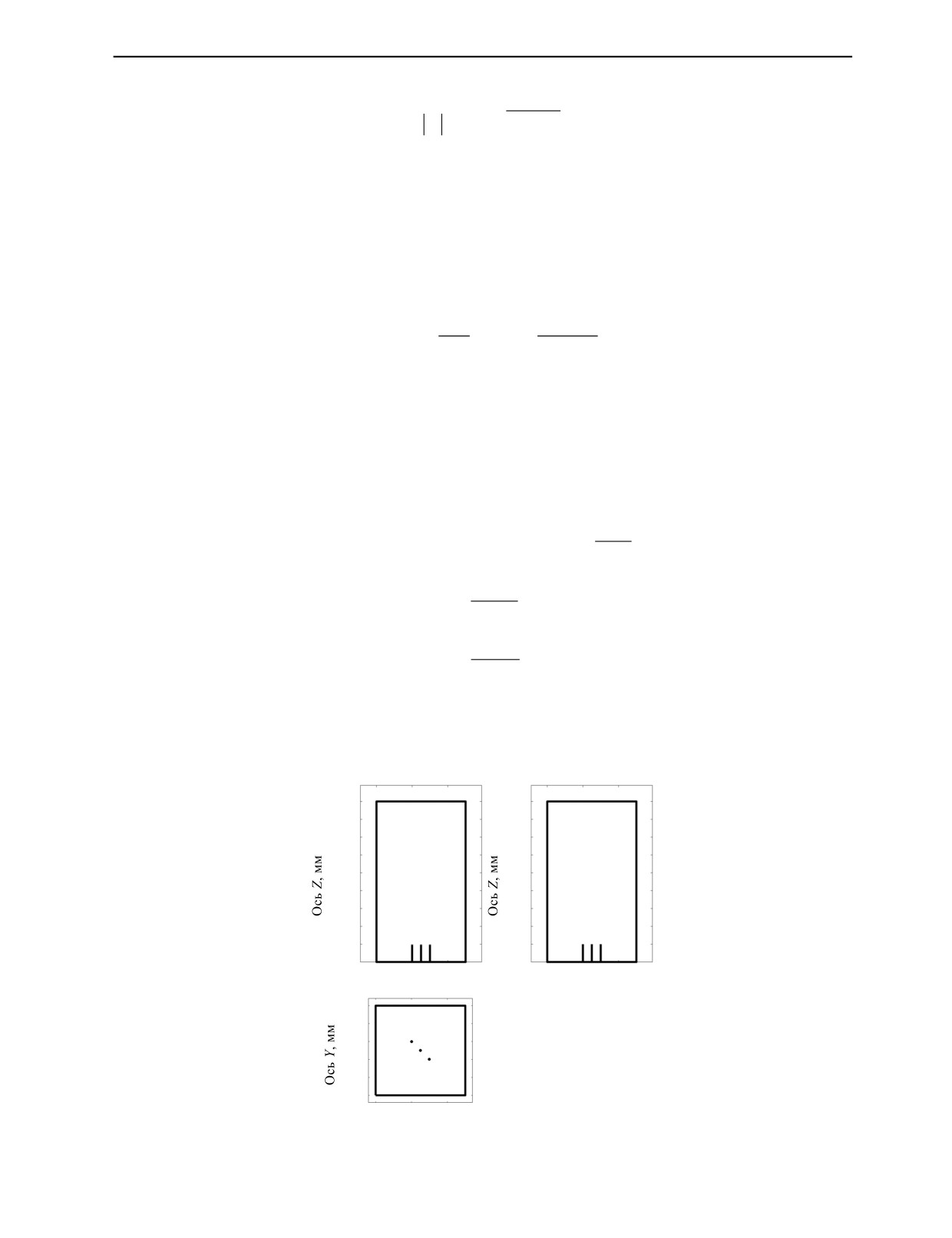
На рис. 5 представлены результаты, полученные в ходе реализации пространственно-времен-
ной обработки с использованием предложенного алгоритма расчета в частотной области.
Дефектоскопия
№ 7
2019
Применение алгоритма расчета в частотной области для ультразвуковой томографии...
17
B-scan
D-scan
B-scan
D-scan
X0
20
Y
20
0
X
0
20
Y
20
0
Z
Z
Z
Z
0
0
0
0
20
20
20
20
40
40
40
40
60
60
60
60
80
80
80
80
C-scan
C-scan
YX0
20
Y
X 0
20
20
20
0
0
Рис. 5. Три проекции объемного синтезированного изобра-
Рис. 6. Три проекции объемного синтезированного
жения, полученного с использованием предложенного
изображения, полученного с использованием алго-
алгоритма расчета в частотной области.
ритма расчета во временной области.
Данные результаты представлены в виде трех проекций объемного изображения. Аналогичные
результаты в случае применения алгоритма с использованием расчетов во временной области
представлены на рис. 6. Необходимо отметить, что оба результата получены с применением оди-
наковых параметров реконструкции. В одной измерительной позиции восстанавливалось изобра-
жение размерами 2,5×2,5×9 см с разрешениями 0,2×0,2×0,2 мм по соответствующим осям. Парци-
альные изображения, полученные в различных измерительных позициях, когерентно складыва-
лись для получения полного синтезированного изображения. При этом в процессе сканирования
шаг перемещения преобразователя составлял 1 мм.
На основании полученных результатов был определен API для каждого отражателя при
использовании алгоритмов пространственно-временной обработки с помощью алгоритмов расче-
та в частотной и временной областях (табл. 1).
Таблица
1
Значения API отражателей в случае использования алгоритмов расчета во временной и частотной областях
Алгоритм расчета в частотной
Алгоритм расчета во временной
Дефект
Разница, %
области
области
А
26,39
26,04
1,32
В
28,17
28,48
1,10
С
26,39
26,30
0,34
Обнаружена высокая корреляция между разрешениями изображений, полученных с использо-
ванием двух алгоритмов. На следующем этапе для оценки вычислительной эффективности пред-
ложенного алгоритма осуществлялось сравнение времени получения результатов по сравнению с
аналогичными значениями алгоритма расчета во временной области. Для этой цели варьировалось
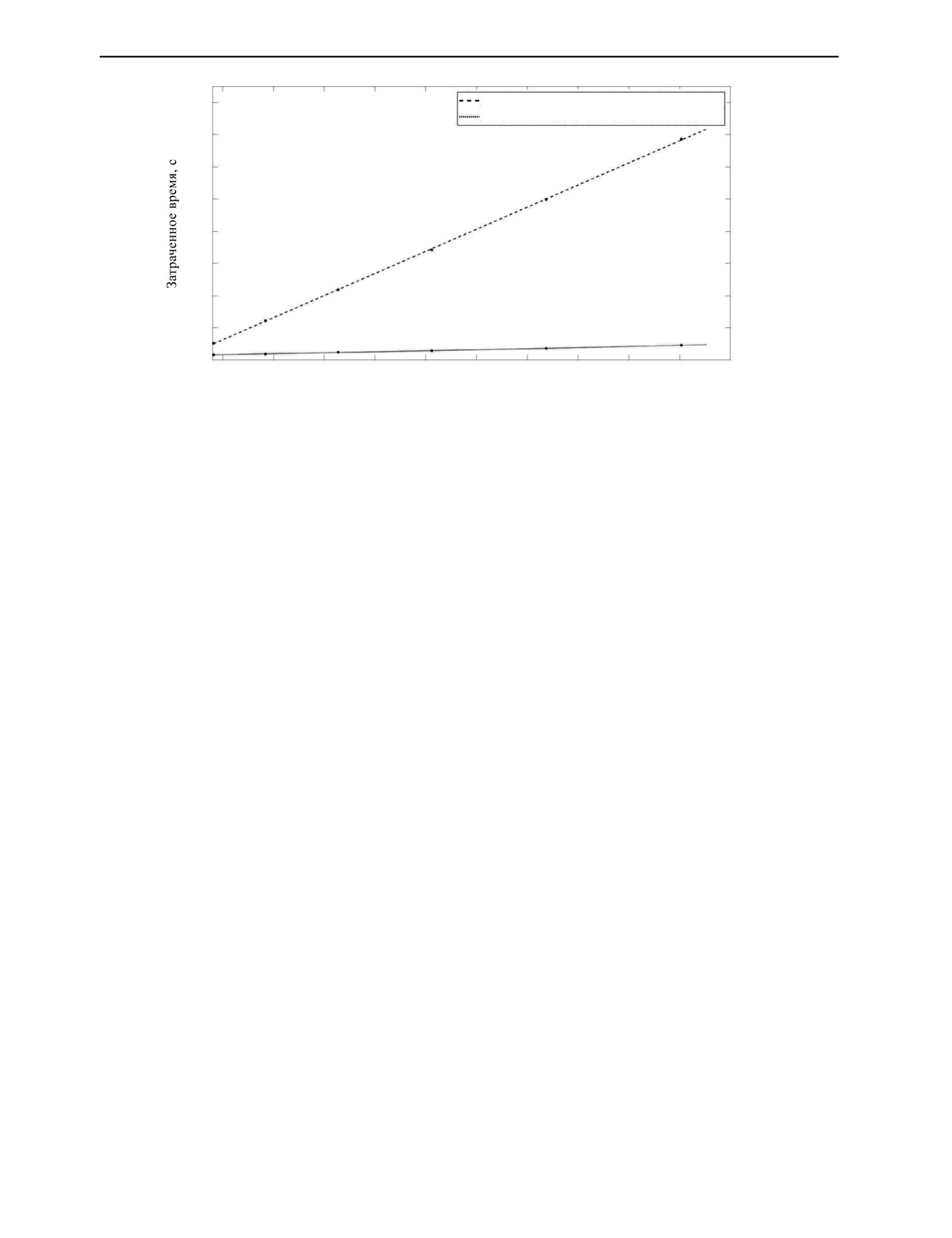
количество вокселей в восстанавливаемом синтезированном изображении. Зависимость времени
получения результатов от количества вокселей в синтезированном изображении представлено
в рис. 7.
Полученные результаты свидетельствуют о высокой вычислительной эффективности разрабо-
танного алгоритма с расчетами в частотной области. При сходном с алгоритмом расчета во времен-
ной области разрешением получаемых синтезированных изображений предложенный алгоритм
Дефектоскопия
№ 7
2019
18
Д.О. Долматов, Д.А. Седнев, А.Н. Булавинов, Р.В. Пинчук
Алгоритм расчета во временной области
80
Алгоритм расчета в частотной области
70
60
50
40
30
20
10
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
2
2,2
×107
Количество вокселей в синтезированном изображении
Рис. 7. Зависимость времени, затрачиваемого на пространственно-временную обработку, от количества вокселей
в синтезированном изображении.
обладает более высокой производительностью. При этом выигрыш в производительности при
использовании предложенного алгоритма перед алгоритмом расчета во временной области растет
при увеличении количества вокселей в восстанавливаемом синтезированном изображении.
Необходимо также отметить, что реализация и анализ эффективности предложенного алгорит-
ма осуществлялся на базе персонального компьютера с использованием программного пакета
Matlab. Вопросы аппаратной оптимизации предложенного алгоритма требуют отдельного рассмо-
трения и не являются темой данной работы. Перспективным продолжением данного исследования
является перенос вычислений на базе предложенного алгоритма на программируемые логические
интегральные схемы или графические процессоры, обеспечивающие выполнение параллельных
вычислений и повышение скорости получения результатов соответственно.
ЗАКЛЮЧЕНИЕ
Фактором, серьезно влияющим на качество и производительность промышленной ультра-
звуковой томографии, является слоистая неоднородность реконструируемых объектов контроля.
В данной статье предложен алгоритм с расчетами в частотной области, учитывающий сложность
среды на примере ультразвукового контроля и трехмерной реконструкции объекта в иммерсион-
ном контакте с применением матричных АР. Алгоритм основан на использовании метода фазо-
вого сдвига и интерполяции Столта. Результаты, полученные с использованием предложенного
алгоритма, сравнивались с результатами, полученными с использованием алгоритма расчета во
временной области. Более высокая скорость получения синтезированных изображений в одной
измерительной позиции при сходном разрешении получаемых синтезированных изображений
свидетельствуют о высокой эффективности предложенного алгоритма. Применимость алгорит-
ма не ограничивается исключительно случаем, рассмотренным в статье, и он может быть адап-
тирован для других условий контроля, к которым можно отнести ультразвуковое сканирование
с использованием наклонных призм и контроль объектов сложных форм в иммерсионном кон-
такте.
Исследование выполнено при финансовой поддержке Государственного задания «Наука», про-
екты № 11.3683.2017/4.6 и № 11.6342.2017/8.9, а также Программы повышения конкурентноспо-
собности Национального исследовательского Томского политехнического университета.
СПИСОК ЛИТЕРАТУРЫ
1. Козлов В.Н., Самокрутов А.А., Яковлев Н.Н., Ковалев А.В., Шевалдыкин В.Г. Акустическая
В- и С-томография крупноструктурных материалов импульсным эхометодом // Приборы и системы
управления. 1989. № 7. С. 21—24.
Дефектоскопия
№ 7
2019
Применение алгоритма расчета в частотной области для ультразвуковой томографии...
19
2. Бадалян В.Г., Базулин Е.Г. Алгоритм численного восстановления дефектов в акустической голо-
графии // Дефектоскопия. 1985. № 4. С. 32—36.
3. Базулин Е.Г. Определение типа дефекта по изображениям, полученным методом C-SAFT, с уче-
том трансформации типов волн при отражении ультразвуковых импульсов от неровных границ объекта
контроля // Дефектоскопия. 2011. № 1. С. 39—56.
4. Holmes C., Drinkwater B., Wilcox P. The post-processing of ultrasonic array data using the total
focusing method // Insight-Non-Destructive Testing and Condition Monitoring. 2004. V. 46. No.
11.
P. 677—680.
5. Bernus L. von, Bulavinov A., Dalichow M., Joneit D., Kröning M., Reddy K.M. Sampling Phased Array
A New Technique for Signal Processing and Ultrasonic Imaging / In: European Conference for Non-destructive
Testing, Berlin, September 2006.
6. Holmes C., Drinkwater B.W., Wilcox P.D. Post-processing of the full matrix of ultrasonic transmit-
receive array data for non-destructive evaluation // NDT & e International. 2005. V. 38. No. 8. P. 701—711.
7. Verkooijen J., Boulavinov A. Sampling phased array a new technique for ultrasonic signal processing
and imaging // Insight-Non-Destructive Testing and Condition Monitoring. 2008. V. 50. No. 3. P. 153—157.
8. Hunter A.J., Drinkwater B.W., Wilcox P.D. The wavenumber algorithm for full-matrix imaging using
an ultrasonic array // IEEE transactions on ultrasonics, ferroelectrics, and frequency control. 2008. V. 55.
No. 11. P. 2450—2462.
9. Бархатов В.А. Развитие методов ультразвуковой дефектоскопии сварных соединений //
Дефектоскопия. 2003. № 1. С. 28—55.
10. Stolt R.H. Migration by Fourier transform // Geophysics. 1978. V. 43. No. 1. P. 23—48.
11. Gazdag J. Wave equation migration with the phase-shift method // Geophysics. 1978. V. 43. No. 7.
P. 1342—1351.
12. Dolmatov D.O., Demyanyuk D.G., Ozdiev A.H., Pinchuk R.V. Fourier-domain post-processing
technique for Digital Focus Array imaging with Matrix phased array for ultrasonic testing of ITER components
//Fusion Engineering and Design. 2018. V. 126. P. 124—129.
13. Dolmatov D., Salchak Y., Sednev D., Pinchuk R. Application of Fourier-Domain Post-Processing
Technique for Ultrasonic Imaging with Matrix Phased Arrays in Advanced Manufacturing of Details and
Machines //Materials Science Forum. Trans Tech Publications. 2018. V. 938. P. 81—88.
14. Dolmatov D.O., Demyanyuk D.G., Sednev D.A., Pinchuk R.V. Applying the Algorithm of Calculation
in the Frequency Domain to Ultrasonic Tomography // Russian Journal of Nondestructive Testing. 2018. V. 54.
No. 4. P. 232—236.
15. Квасников К.Г., Солдатов А.И., Болотина И.О., Кренинг М., Потапенко А.А. Применение мето-
да геометрической акустики для решения задач визуализации // Дефектоскопия. 2013. № 11. С. 21—26.
16. Fan C., Caleap M., Pan M., Drinkwater B.W. A comparison between ultrasonic array beamforming
and super resolution imaging algorithms for non-destructive evaluation //Ultrasonics. 2014. V. 54. No. 7.
P. 1842—1850.
Дефектоскопия
№ 7
2019