УДК 620.179.14
ВЛИЯНИЕ ВАРИАНТОВ НАМАГНИЧИВАНИЯ
НА ОБНАРУЖЕНИЕ НЕЖЕЛАТЕЛЬНЫХ ВКЛЮЧЕНИЙ В МАССЕ
ЖЕЛЕЗНОЙ РУДЫ
© 2019 г. Ю.Я. Реутов1,*
1Институт физики металлов имени М.Н. Михеева УрРАН, Россия 620108 Екатеринбург,
ул. Софьи Ковалевской, 18
*E-mail: asija1@yandex.ru
Поступила в редакцию 14.05.2019; после доработки 02.06.2019
Принята к публикации 05.07.2019
Выполнено теоретическое и экспериментальное сравнение двух вариантов построения накладного индукционного
преобразователя для обнаружения стальных предметов в потоке железной руды на ленте транспортера. Рассмотрены
варианты с охватом контролем всей ширины ленты транспортера и с разбиением ширины потока на «дорожки». Выяв-
лено существенное влияние магнитного взаимодействия частиц породы, намагничиваемых полем вихретокового преоб-
разователя. Показано, что намагничивание потока руды локальными участками может обеспечить существенно лучшие
условия для селективного обнаружения нежелательных стальных включений в потоке железной руды по сравнению с
намагничиванием потока по всей ширине. Однако это возможно лишь при определенных соотношениях размеров преоб-
разователя и ширины транспортерной ленты. Результаты экспериментальной проверки удовлетворительно согласуются
с теоретическими прикидками.
Ключевые слова: железная руда, стальное включение, лента транспортера, дробилка, индукционное обнаружение,
магнитный диполь, магнитный момент, однородное намагничивание, локальное намагничивание, множество диполей,
сигнал/помеха.
DOI: 10.1134/S0130308219090045
Несмотря на существенные успехи в теории и практике индукционного обнаружения металли-
ческих включений в различных средах [1], их селективное обнаружение на фоне также металличе-
ских, но не представляющих интереса предметов, остается актуальным [2—5]. Одним из примеров
такой производственной проблемы является обнаружение стальных посторонних включений в по-
токе железной руды, поступающем по транспортеру на дробилку обогатительной фабрики [6—9].
Железная руда, сама по себе, является достаточно твердой и поэтому добывается преимуще-
ственно открытым способом посредством взрыва [10, 11], однако в ее массе нередко оказываются
стальные посторонние предметы (обломки инструмента, зубья экскаваторных ковшей, долота и
пр.). Такие предметы (нередко закаленные) значительно превосходят по твердости куски породы
и, если обладают достаточными размерами, могут вызвать повреждение дорогостоящего дробиль-
ного устройства. Для этого достаточно, чтобы их размеры превысили несколько десятков милли-
метров, то есть, чтобы они обладали массой более 100—200 г. При типичной ширине транспор-
терной ленты 800 мм на одном ее погонном метре размещается не менее сотни килограмм руды,
содержащей 10—50 процентов железа. Получается, что необходимо выявлять стальные предметы
массой в десятые доли килограмма на фоне десятков килограммов железа. Очевидно, что индук-
ционным способом осуществить такое селективное обнаружение можно лишь, используя значи-
тельное различие в удельной электропроводности материалов объектов поиска и рудного сырья, то
есть методом вихревых токов (с намагничиванием гармоническим магнитным полем) или методом
переходных процессов (с намагничиванием импульсным полем). Удельная электропроводность за-
каленной стали составляет порядка 6 млн сименс на метр [12], в то время как у железной руды она
не превышает тысячи сименс на метр [10].
Предлагаемая статья посвящена рассмотрению выбора варианта построения накладного вихре-
токового преобразователя для транспортерного обнаружителя стальных посторонних включений.
Первый вариант предполагает охват контролем всей ширины транспортерной ленты, а второй —
разбиением зоны контроля по ширине на несколько полос (дорожек). Первый вариант, при оче-
видной простоте, должен обеспечивать меньшее соотношение сигнал/помеха, поскольку в зоне
действия вихретокового преобразователя находится поток руды (в данном случае являющийся по-
мехой) по всей ширине ленты транспортера. Второй вариант предполагает наличие нескольких
вихретоковых преобразователей, осуществляющих контроль отдельных участков ширины потока
руды. Можно ожидать, что в этом случае будет достигнуто лучшее соотношение сигнал/помеха,
но устройство существенно усложняется, а его пропускная способность может заметно снизиться.
30
Ю.Я. Реутов
В предлагаемой статье выполнены численные оценки выигрыша в помехоустойчивости (селектив-
ности) от применения «многодорожечной» системы контроля, а также приведены результаты экс-
периментальной проверки таких оценок.
ОБЩИЕ РАССУЖДЕНИЯ
В [1, 13] в качестве характеристики предмета, обнаруживаемого по его магнитному полю, пред-
ложен магнитный момент p, индуцируемый магнитным полем единичной напряженности. В пер-
вом приближении, он не зависит от напряженности действующего магнитного поля и позволяет
рассматривать задачу индукционного обнаружения как линейную. В зависимости от вида поля,
намагничивающего объект поиска, этот момент может быть постоянным или переменным во вре-
мени (гармоническим или импульсным), как и обусловленное им магнитное поле (поле рассеяния).
При намагничивании полем H (неважно, постоянным или переменным) металлический пред-
мет, характеризующийся параметром p, приобретет индуцированный магнитный момент
P ≈ p ∙ H.
(1)
При намагничивании постоянным полем этот момент также будет постоянным, а при исполь-
зовании переменного поля, соответственно, переменным.
Из магнитостатики известно [1, 14, 15] что точечный магнитный диполь, обладающий магнит-
ным моментом P и ориентированный вертикально, создает на оси симметрии в направлении своей
намагниченности на расстоянии Z магнитное поле напряженностью
P
H0
=
(2)
3
2⋅π⋅Z
В стороне от этой оси, на расстоянии r от нее, компоненту поля диполя в направлении его на-
магниченности (вертикально) запишем как
2
2
P
2⋅Z
−r
H
=
⋅
r
(3)
4⋅π
2
2
(
Z
+
r
)2,5
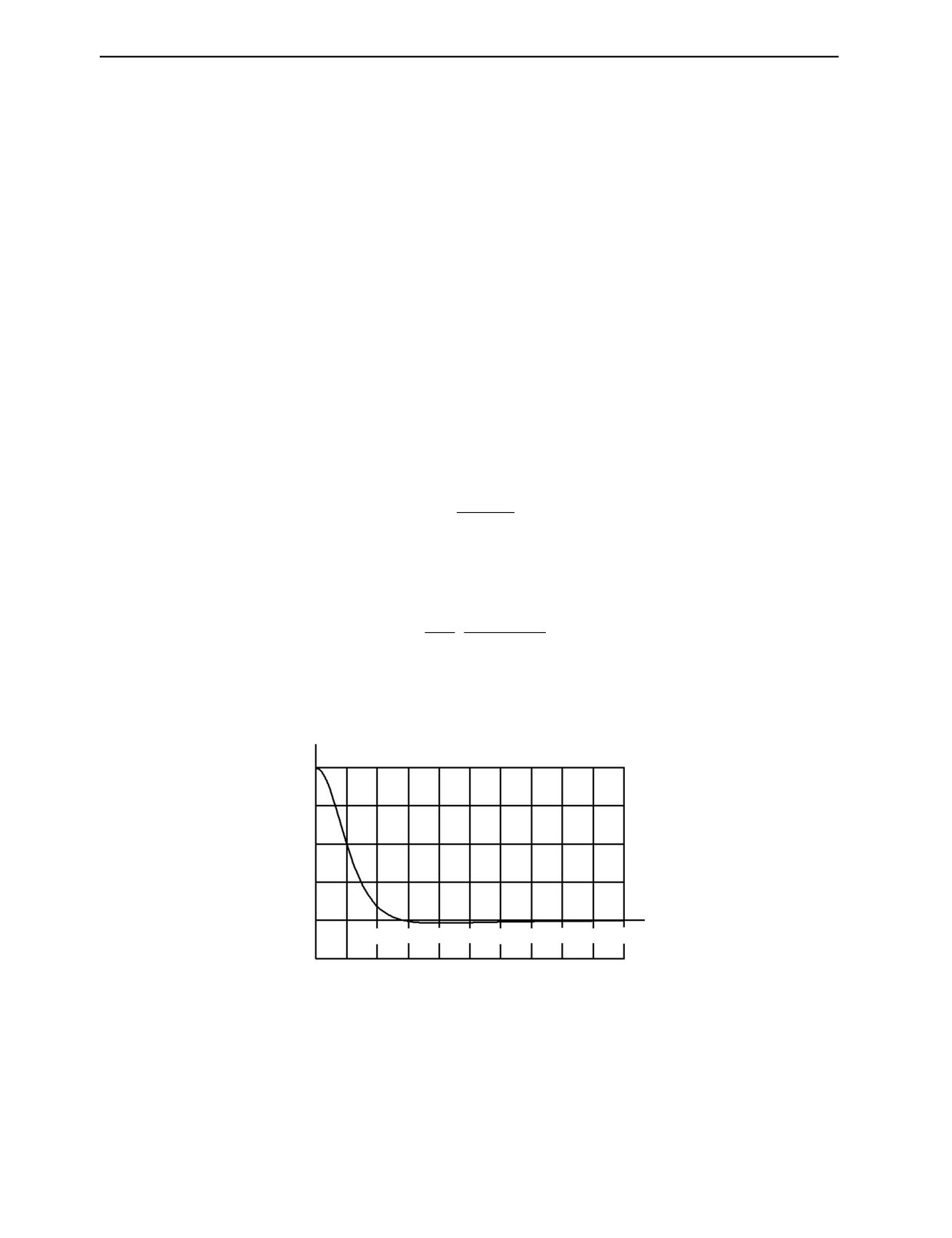
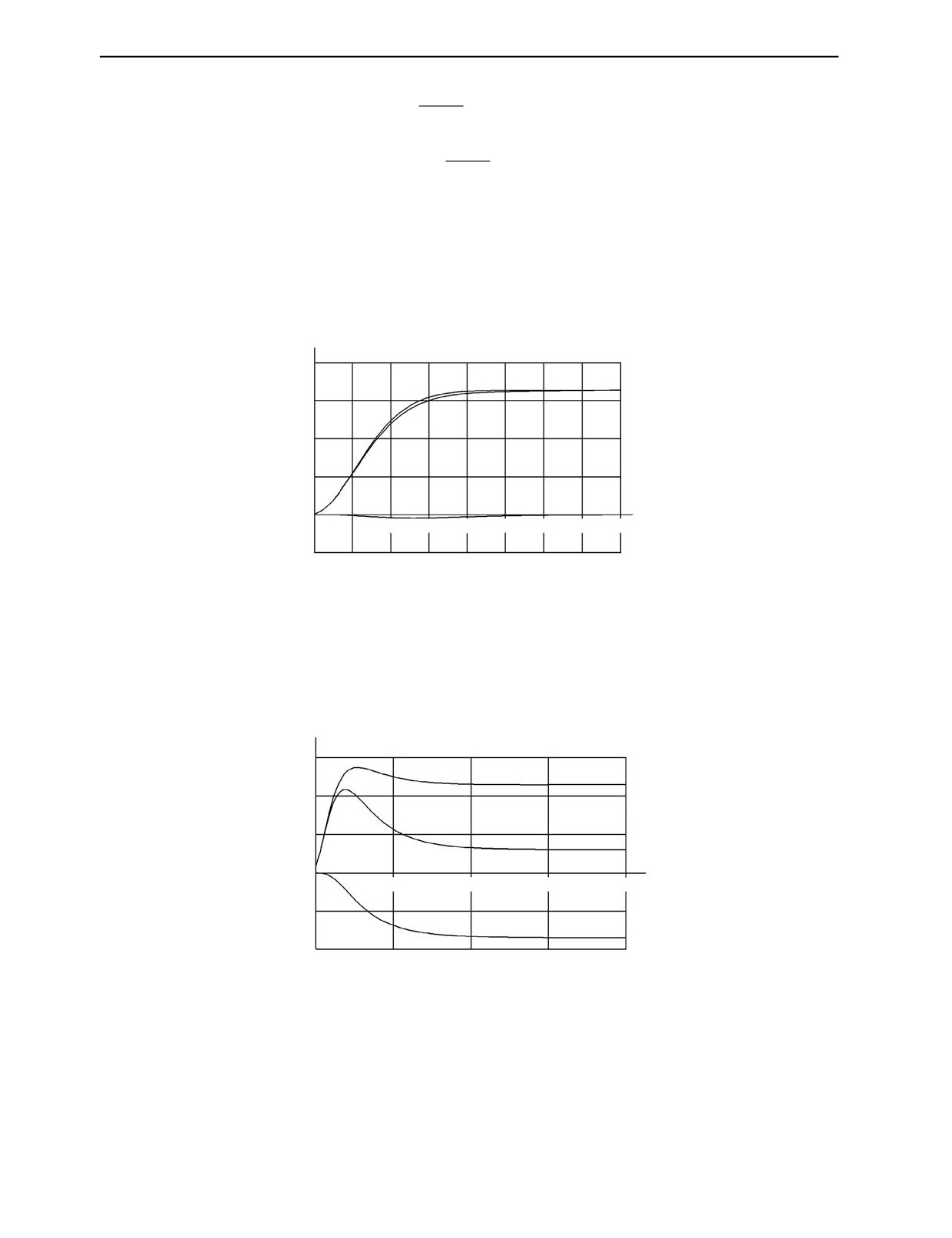
На рис. 1 приведен график зависимости Hr(r), вычисленный с использованием (2) и (3).
Hr/H0
1,0
0,75
0,5
0,25
r/Z
0
1
2
3
4
5
-0,25
Рис. 1. Зависимость вертикальной компоненты поля диполя на фиксированной высоте при вариациях координаты r.
На этом рисунке по горизонтали отложена координата r, нормированная к Z, а по вертикали —
вертикальная компонента поля диполя, отнесенная к ее значению при r = 0.
Видно, что в стороне от линии симметрии диполя компонента его поля рассеяния, параллель-
ная вектору магнитного момента, убывает и даже меняет знак, но, все же, в большом диапазоне
значений r/Z она отлична от нуля.
Дефектоскопия
№ 9
2019
Влияние вариантов намагничивания на обнаружение нежелательных включений...
31
ПОЛЕ МНОЖЕСТВА ОДИНАКОВЫХ ДИПОЛЕЙ
В цилиндрической системе координат рассмотрим поле множества одинаковых точечных маг-
нитных диполей, равномерно размещенных на горизонтальной плоскости с координатой Z = 0.
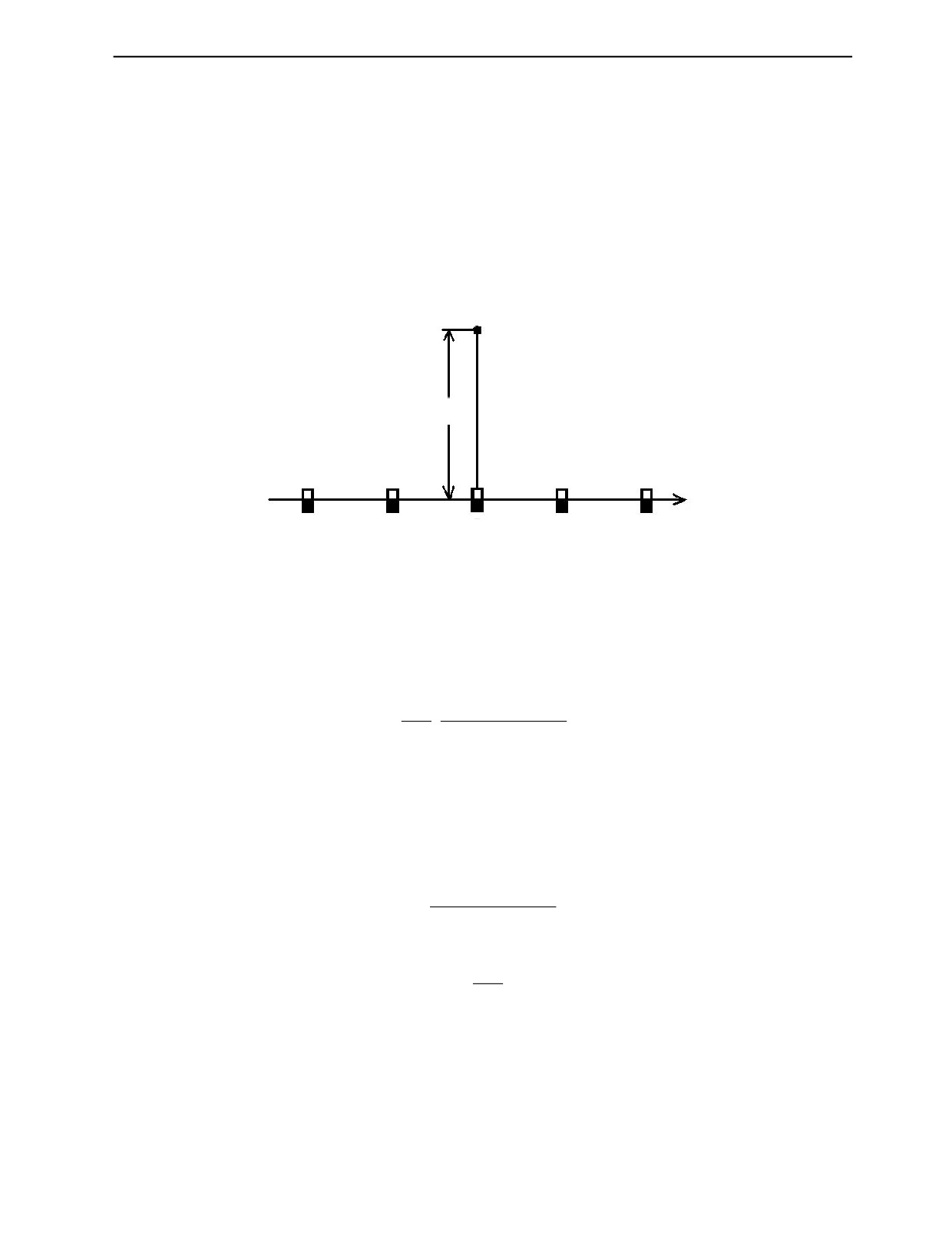
Разрез этого множества вертикальной плоскостью, проходящей через ось круговой симметрии,
изображен на рис. 2. Данный вариант рассмотрения соответствует воздействию намагничивающе-
го поля вихретокового преобразователя на поток железной руды по всей ширине транспортерной
ленты в предположении однородности этого поля. Предполагается, что намагничивающий контур
вихретокового преобразователя, создающий однородное поле, направленное вертикально, распо-
ложен под транспортерной лентой, а приемник (приемники) магнитного поля размещен над по-
током железной руды.
M
Hz
Z
r
0
Рис. 2. Множество одинаковых диполей в разрезе.
Все диполи имеют одинаковые магнитные моменты P, направленные вертикально. Они разме-
щены в горизонтальной плоскости на концентрических окружностях с радиусами, нарастающими
с шагом ∆r, и отстоят по окружности друг от друга на одинаковые расстояния вдоль нее.
В таком случае вертикальная компонента поля, создаваемого совокупностью диполей в точке M
(см. рис. 2), будет определяться выражением:
2
2
k=n P
2⋅Z
−
(
∆ ⋅k
)
H
=
⋅
⋅
(
k
+1
)
,
Z
∑
k=0
2,5
(4)
4⋅π
2
2
Z
+
(
∆ ⋅k
)
где n = R/∆r и R, в свою очередь, радиус круговой границы рассматриваемого множества диполей.
В этой формуле суммируются поля, создаваемые диполями, размещенными на окружности теку-
щего радиуса r. Поле каждого такого диполя вычисляется по формуле (3) и умножается на текущее
количество k + 1 одинаковых диполей, поместившихся на этой окружности. В пределах радиуса
множества диполей R таких окружностей n.
Введем обозначение
2
2
k=n
2⋅Z
−
(
∆ ⋅k
)
K
=
⋅
(
k
+1
)
(5)
∑
k=0
2,5
2
2
Z
+
(
∆ ⋅k
)
Следовательно,
P
H
=
⋅K
(6)
Z
4
⋅π
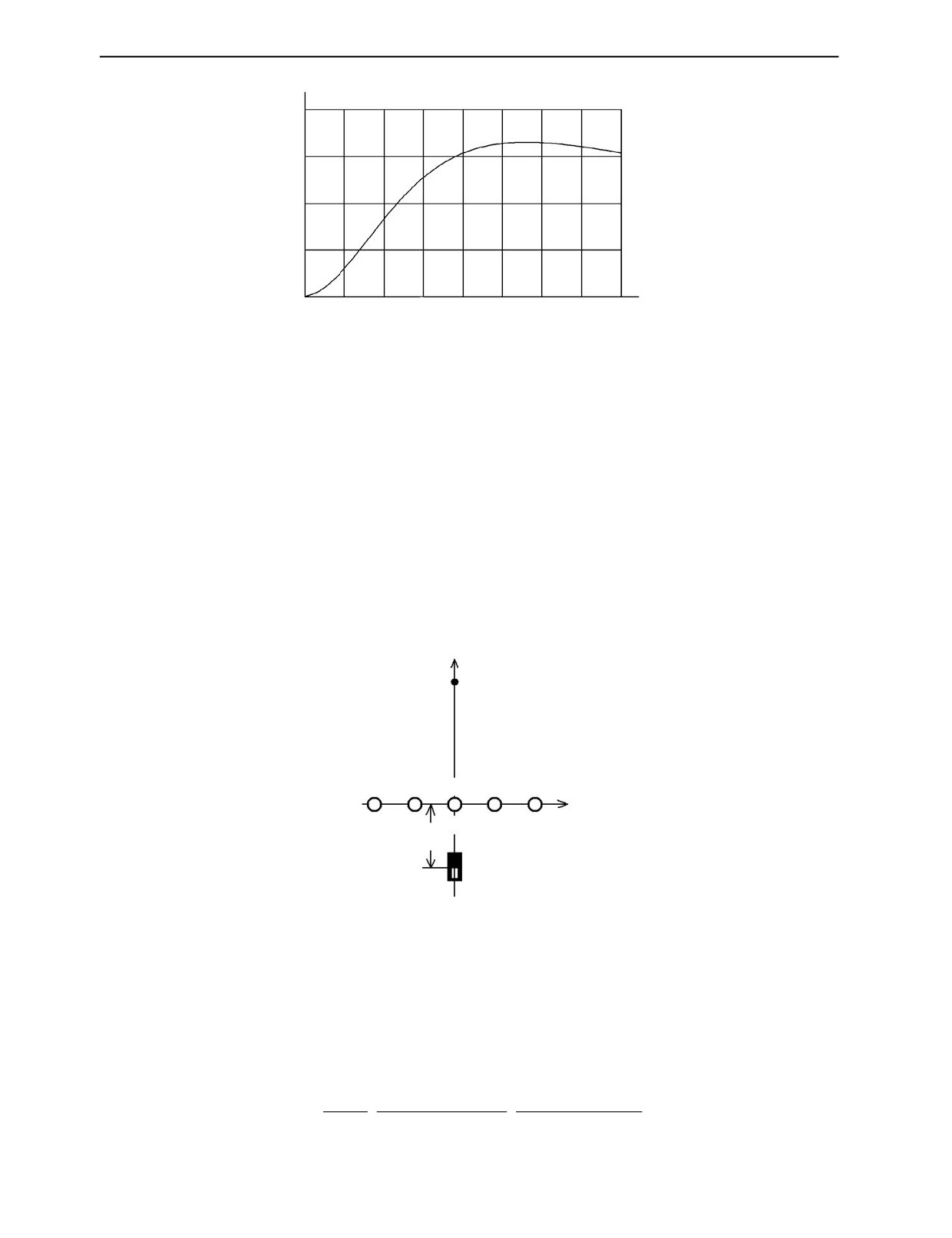
На рис. 3 представлена зависимость K от радиуса множества диполей R, выраженного в едини-
цах высоты Z, на которой вычисляется суммарное поле. Данная зависимость вычислена для случая,
когда в круге радиусом до 2·Z был равномерно размещен 3321 диполь (∆r = 0,025/Z). Видно, что
суммарное поле в точке M достигает максимума при радиусе множества диполей, в 1,5 раза пре-
вышающем высоту ее нахождения над диском с диполями. При дальнейшем нарастании радиуса
множества создаваемое им суммарное поле уменьшается и в пределе обращается в нуль. Очевидно,
Дефектоскопия
№ 9
2019
32
Ю.Я. Реутов
K
800
600
400
200
R/Z
0
0,5
1,0
1,5
2,0
Рис. 3. Зависимость K от радиуса множества диполей.
что абсолютная величина максимума коэффициента K будет нарастать с увеличением плотности
размещения диполей на диске, однако форма кривой K(R) существенно не изменится. Как видно из
рисунка, в данном случае поле диполя, подлежащего обнаружению (и помещенного в центр дис-
ка), будет равно суммарному полю множества наших диполей, если его магнитный момент будет в
сотни раз больше момента парциального диполя из множества.
ПОЛЕ МНОЖЕСТВА ДИПОЛЕЙ ПРИ НЕОДНОРОДНОМ НАМАГНИЧИВАНИИ
Перейдем (опять же, в цилиндрической системе координат) к рассмотрению случая, когда фер-
ромагнитные частицы намагничиваются неоднородным полем точечного диполя, обладающего
магнитным моментом PM (неважно, постоянным или переменным) и размещенного под диском с
частицами на оси симметрии системы на расстоянии ZM от диска (рис. 4). Поле, создаваемое таким
источником, аксиально-симметрично и в местах расположения намагничиваемых частиц содержит
как вертикальную, так и радиальную компоненты.
Z
M
p
p
p
p
p
r
0
ZM
PM
Рис. 4. Неоднородное намагничивание точечным диполем.
Данный случай соответствует «многодорожечной» системе контроля, когда одним из нескольких
одинаковых вихретоковых преобразователей намагничивается лишь часть ширины потока руды.
Будем полагать наши ферромагнитные частицы изотропными в отношении намагничивания
обеими компонентами поля диполя, а само намагничивание линейным. Влиянием соседних частиц
друг на друга пренебрегаем. В таком случае часть суммарного поля намагниченных частиц, об-
условленного вертикальной компонентой поля нашего источника, размещенного на расстоянии ZM
от плоскости их расположения, запишем как
2
2
2
2
k=n
P
⋅
p
2⋅Z
−
(
∆ ⋅k
)
2⋅Z
−
(
∆ ⋅k
)
M
M
H
=
⋅
⋅
⋅
(
k
+1
)
Z1
∑
k=0
2
2,5
2,5
(7)
16⋅π
2
2
2
2
Z
+
(
∆ ⋅k
)
Z
+
(
∆ ⋅k
)
M
Дефектоскопия
№ 9
2019
Влияние вариантов намагничивания на обнаружение нежелательных включений...
33
Эта формула построена аналогично формуле (4), но магнитный момент парциального диполя,
индуцированный полем единичной напряженности p, в соответствии с (1), умножается на поле,
создаваемое локальным намагничивающим диполем на данном текущем радиусе.
Снова введем обозначение
2
2
2
2
k=n
2⋅Z
−
(
∆ ⋅k
)
2⋅Z
−
(
∆ ⋅k
)
M
K
=
⋅
⋅
(
k
+1
)
Z1
∑
2,5
2,5
(8)
2
2
2
2
k=0
Z
M
+
(
∆ ⋅k
)
Z
+
(
∆ ⋅k
)
И тогда, очевидно, что
P
⋅
p
M
H
=
⋅ K
(9)
Z1
2
Z1
16⋅π
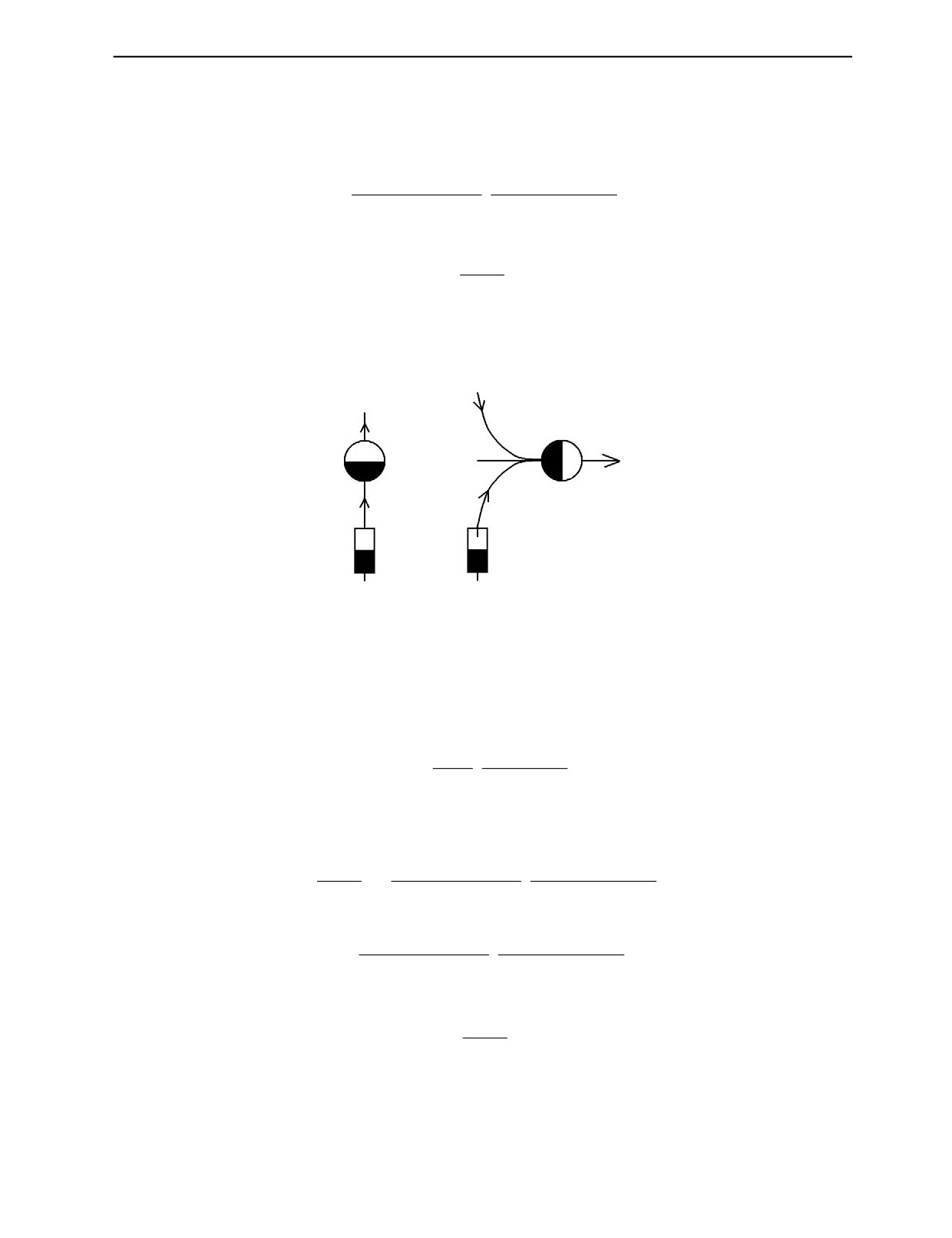
Эта часть поля, создаваемая намагниченными частицами в точке M, обусловлена вертикальной
компонентой поля источника и совпадает по полярности с намагничивающим полем (см. левую
часть рис. 5).
p
p
r
PM
PM
Рис. 5. Намагничивание частиц разными компонентами поля источника.
Помимо нее в точке M присутствует также вертикальная составляющая поля частиц HZ2,
обусловленная радиальной компонентой поля источника и обладающая противоположной по-
лярностью относительно составляющей, обусловленной вертикальной компонентой (см. правую
часть рис. 5).
Принимая во внимание, что, согласно [1, 10], радиальная компонента Hr поля магнита с момен-
том PM на расстоянии от него ZM по вертикали и r по горизонтали определяется выражением
3
⋅ P
Z
⋅
r
M
M
H
=
⋅
,
r
(10)
4⋅π
2
2
(
Z
+
r
)2,5
M
нетрудно показать, что для рассматриваемого нами случая присутствия источника намагничиваю-
щего поля на расстоянии ZM от плоскости размещения ферромагнитных частиц, по аналогии с (7),
будет иметь место
k=n
P
⋅
p
3
⋅ Z
⋅∆r⋅k
3⋅Z⋅∆r⋅k
M
M
H
=
⋅
⋅
⋅
(
k
+1).
Z2
2
∑
2,5
2,5
(11)
16⋅π
2
2
2
2
k=0
Z
M
+
(
∆ ⋅k
)
Z
+
(
∆ ⋅k
)
Обозначив
k=n
3
⋅
Z
⋅∆
r⋅k
3
⋅
Z⋅∆r⋅k
M
K
=
⋅
⋅
(
k
+
1),
Z
2
∑
2,5
2,5
(12)
2
2
2
2
k=0
Z
M
+
(
∆ ⋅k
)
Z
+
(
∆ ⋅k
)
получим
P
⋅
p
M
(13)
H
=
⋅ K
Z
2
2
Z
2
16
⋅π
В таком случае при намагничивании аксиально-симметричным полем точечного источника,
размещенного на расстоянии ZM от плоскости с ферромагнитными частицами, создаваемое ими в
точке M поле будет иметь напряженность
Дефектоскопия
№ 9
2019
34
Ю.Я. Реутов
P
M
⋅
p
H
=
⋅
(
K
−
K
)
(14)
Z
2
Z1
Z2
16⋅π
или, по-другому,
P
⋅
p
M
H
=
⋅ K
,
(15)
Z
2
Z
16⋅π
где
K
=K
−K
(16)
Z
Z
1
Z2
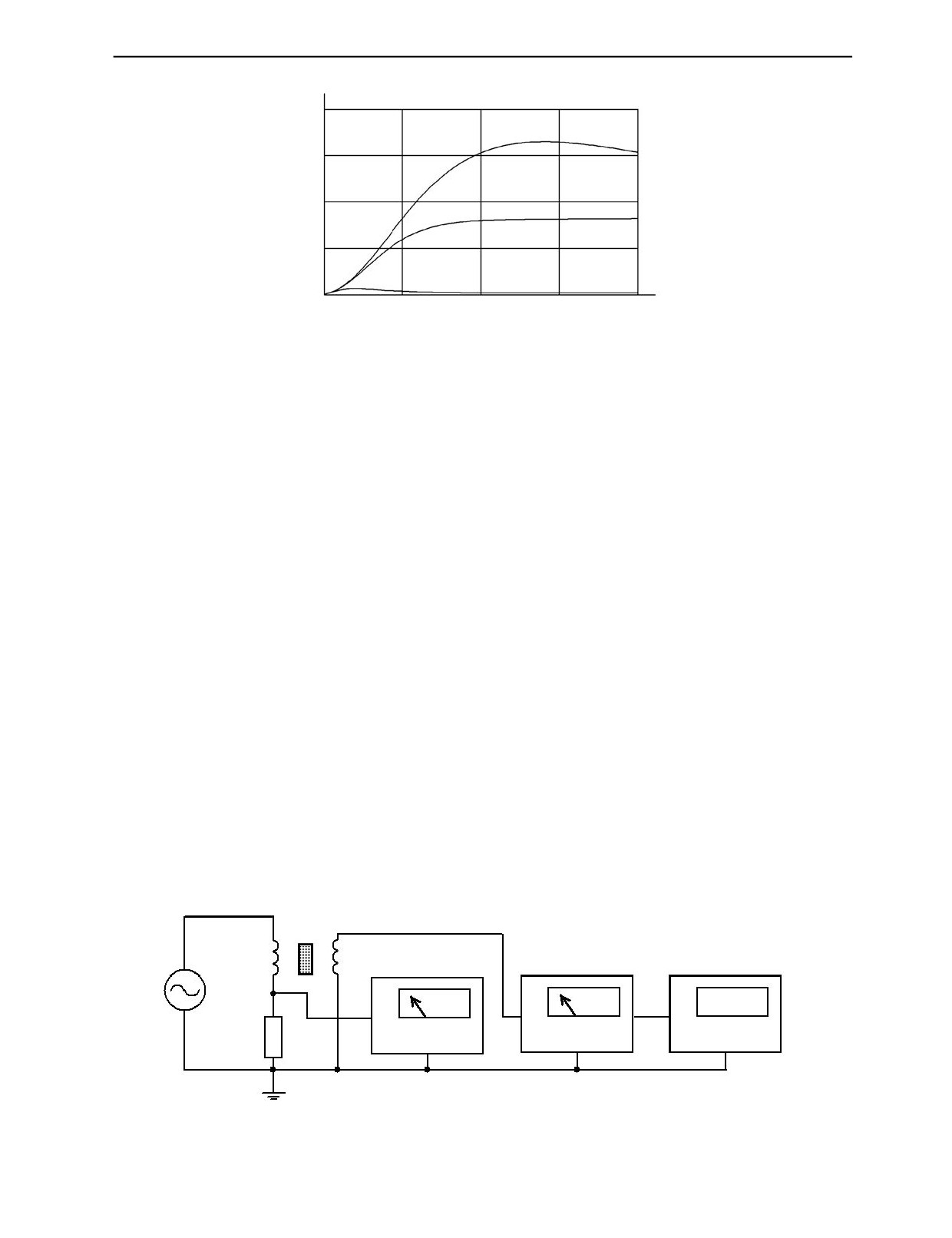
На рис. 6 и 7 приведены результаты вычислений по формулам (8) и (12). Рис. 6 соответству-
ет случаю, когда дипольный источник расположен на расстоянии ZM = Z, а рис. 7 — случаю
ZM = 0,2·Z. По горизонтали на этих рисунках отложены радиусы множеств ферромагнитных ча-
стиц, отнесенные к высоте размещения точки M, а по вертикали — вычисленные значения KZ.
K
800
1
600
3
400
200
R/Z
2
0
0,5
1,0
1,5
2,0
–200
Рис. 6. Коэффициенты K при ZM = Z.
На рисунках кривые 1 соответствуют вычисленным значениям KZ1, кривые 2 — значениям KZ2
и, наконец, кривые 3 — значениям KZ, вычисленным по формуле (16). Видно, что компонента поля,
обусловленная радиальным намагничиванием частиц, возрастает (по абсолютной величине) при
увеличении радиуса их множества и частично компенсирует компоненту, обусловленную аксиаль-
ным намагничиванием.
K
9000
1
6000
3
3000
R/Z
0
0,5
1,0
1,5
2,0
–3000
2
-6000
Рис. 7. Коэффициенты K при ZM = 0,2∙Z.
На рис. 8 изображены зависимости коэффициента K от радиуса множества намагниченных
частиц при различных вариантах их намагничивания. Заметим, что на рис. 6—8 поле, создавае-
мое самим дипольным источником в точке M, не учитывается. Кривая 1 соответствует случаю по
рис. 2, когда все частицы намагничены одинаково в вертикальном направлении. Кривая 2 соответ-
ствует случаю локального намагничивания источником (см. рис. 4), размещенным на расстоянии ZM
= Z от плоскости расположения частиц. Кривая 3 соответствует такому же намагничиванию, но на
расстоянии ZM = 0,2∙Z. Параметры источника намагничивающего поля подобраны так, чтобы во всех
Дефектоскопия
№ 9
2019
Влияние вариантов намагничивания на обнаружение нежелательных включений...
35
K
400
1
300
200
2
100
R/Z
3
0
0,5
1,0
1,5
2,0
Рис. 8. Значения K при разных вариантах намагничивания.
трех случаях магнитный момент диполя (частицы), размещенного на оси, оставался одним и тем же.
Плотность размещения намагниченных частиц на плоскости оставалась неизменной. Видно, что,
как и следовало ожидать, при однородном намагничивании (кривая 1) множество ферромагнитных
частиц при его радиусе, сопоставимом с высотой размещения точки наблюдения, создает в точке
M наибольшее поле. Это поле (в данном случае) в 300 с лишним раз превышает поле, создаваемое
там центральным диполем. Причем оно прекращает нарастать только при достижении множеством
частиц радиуса, в полтора раза большего высоты размещения точки M. Согласно выполненным
расчетам, применение аксиально-симметричного неоднородного намагничивания позволяет суще-
ственно уменьшить суммарное поле, действующее в точке M от множества частиц. Помимо этого,
уменьшается значение радиуса множества, начиная с которого влияние его нарастания на напряжен-
ность поля в точке M минимизируется.
РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТА
Выполненные прикидочные расчеты обладают очевидными недостатками: учитывался лишь
один слой намагниченных частиц, а их взаимное влияние не принималось во внимание. Для про-
верки адекватности вычисленных закономерностей был собран макет обнаружительного устрой-
ства, состоявший из плоской круговой намагничивающей обмотки (рамки) диаметром 800 мм,
в центр которой помещался стальной образец в виде ролика от подшипника качения диаметром
24 и высотой 22 мм, или конгломерат ферромагнитных частиц в виде диска заданного радиуса вы-
сотой 20 мм. Конгломерат представлял собой множество вороненых стальных винтов размера М4
длиной по 6 мм, ориентированных случайным образом. Они размещались в пластиковых круглых
контейнерах с диаметрами 48, 72, 124 и 200 мм (при одинаковой высоте 20 мм), последовательно
вносимых в зону обследования. На расстоянии (высоте) 65 мм от плоскости размещения ферромаг-
нитного образца на оси симметрии системы располагалась приемная катушка средним диаметром
35 мм. Блок-схема макета представлена на рис. 9.
Круговая рамка использовалась для осуществления приблизительно однородного намагничи-
вания исследуемых объектов (контейнеров), а в качестве локального источника намагничивающего
поля применялась плоская круговая катушка средним диаметром 30 и высотой 10 мм.
3
2
4
6
7
8
1 2 3 4
1
5
Рис. 9. Блок-схема макета обнаружительного устройства:
1 — генератор намагничивающего тока Г3-33 с частотой 220 Гц; 2 — намагничивающая катушка; 3 — исследуемый образец;
4 — приемная катушка; 5 — образцовый резистор; 6 и 7 — вольтметры В3-38А; 8 — мультитестер DT830.
Дефектоскопия
№ 9
2019
36
Ю.Я. Реутов
Выполнение измерений в переменном поле позволило исключить влияние возможной остаточ-
ной намагниченности ферромагнитных частиц, наполняющих контейнер. Частота используемого
переменного поля была такова, что процесс намагничивания мало отличался от намагничивания
постоянным полем.
Целью эксперимента было сравнение вычисленных и экспериментальных зависимостей полей,
создаваемых конгломератом одинаковых по электромагнитным свойствам частиц, от вариантов на-
магничивания и размеров конгломерата.
Ролик от подшипника качения служил для получения опорного сигнала, позволявшего осу-
ществлять численные сравнения результатов измерений при использовании разных вариантов на-
магничивания контейнеров разных диаметров.
Сила переменного тока, поступающего в намагничивающую катушку 2 от генератора 1, контро-
лировалась вольтметром 6 по падению напряжения на резисторе 5 и поддерживалась неизменной
(по амплитуде). Модуль переменного напряжения, наводимого в приемной катушке 4, измерялся
через вольтметр 7 цифровым прибором 8. Из этого напряжения вычиталось значение, наводимое в
приемной катушке при отсутствии в зоне контроля каких-либо объектов.
Напряжение, наводимое в приемной катушке при помещении в зону контроля стального роли-
ка от подшипника, ориентированного вертикально, принималось за полезный сигнал S (Signal),
а напряжение, наводимое при помещении в зону контроля контейнера заданного диаметра с кон-
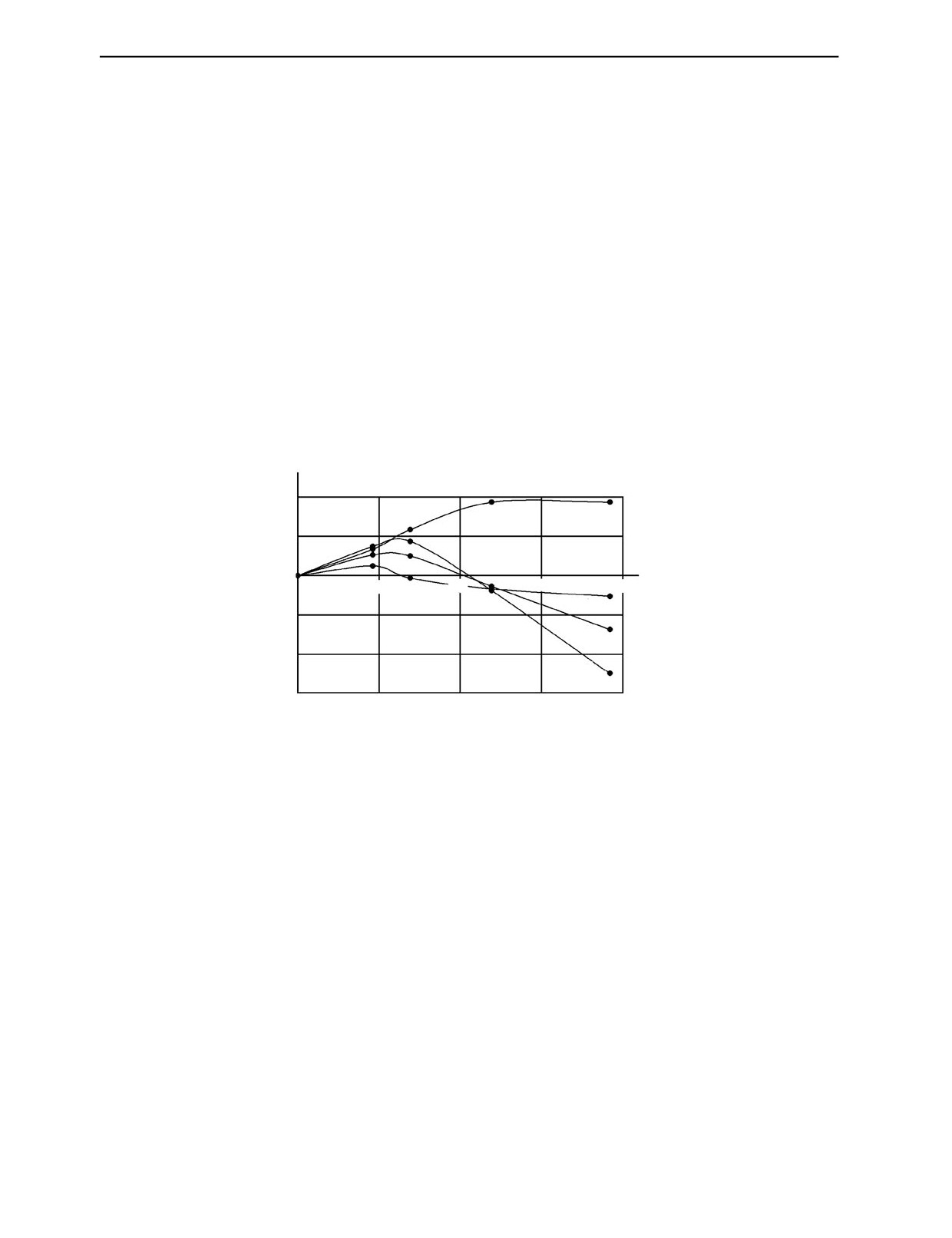
гломератом ферромагнитных винтов, принималось за помеху H (Handicap). На рис. 10 приведены
результаты измерений.
H / S
4
1
2
R/Z
0
0,4
0,8
1,2
1,6
4
–2
3
-4
2
-6
Рис. 10. Результаты измерений на макете преобразователя.
На этом рисунке по горизонтали отложен R/Z — радиус контейнера с ферромагнитными части-
цами в единицах высоты Z, а по вертикали H/S — отношение помехи к сигналу при данном ради-
усе контейнера с частицами и выбранном варианте намагничивания. Кривая 1 соответствует одно-
родному намагничиванию, кривая 2 — неоднородному намагничиванию локальной катушкой при
ZM = 1,34·Z, кривая 3 при ZM = 0,92·Z и кривая 4 при ZM = 0,26·Z.
Как нетрудно догадаться, кривые на рис. 8 и 10 отображают одно и то же явление и могут
использоваться для качественного сравнения результатов прикидочного расчета и эксперимента.
Сопоставление хода кривых 1, соответствующих намагничиванию однородным полем, свидетель-
ствует о качественном совпадении расчета с экспериментом.
Результаты измерений при локальном намагничивании подтверждают предсказываемый расче-
тами существенный выигрыш в помехоустойчивости по сравнению с использованием однородного
намагничивания для случаев, когда радиус множества частиц не превышает расстояния, на котором
выполняются измерения.
Вместе с тем, бросается в глаза резкое несоответствие расчетных и экспериментальных кривых
при радиусах контейнеров ферромагнитных частиц, сопоставимых с высотой размещения при-
емной катушки или превышающих ее при локальном намагничивании. В отличие от расчетных,
экспериментальные кривые пересекают ось абсцисс и принимают отрицательные значения, суще-
ственно превышающие по абсолютной величине их максимальные положительные значения. Это
объясняется преобладающим влиянием намагниченности ферромагнитных частиц, обусловленной
радиальной компонентой аксиально-симметричного магнитного поля локального источника. При
намагничивании в радиальном направлении ферромагнитные частицы образуют протяженные це-
Дефектоскопия
№ 9
2019
Влияние вариантов намагничивания на обнаружение нежелательных включений...
37
почки, намагничиваемые гораздо лучше [16], чем при намагничивании в аксиальном направлении,
хотя бы потому, что толщина ансамбля частиц (в данном случае) составляет всего 20 мм, в то время
как его радиус может достигать 100 мм. Это обстоятельство не учитывалось в нашем прикидочном
расчете, поскольку взаимодействием частиц мы пренебрегали.
Наличие существенных отрицательных участков на графиках рис. 10 свидетельствует о необ-
ходимости внимательного подхода к синтезу [1] локальных намагничивающих катушек вихретоко-
вого преобразователя, в особенности в части учета радиальной компоненты создаваемого ими маг-
нитного поля. Правильным подбором этой компоненты (посредством применения дополнительных
намагничивающих катушек) можно минимизировать (по абсолютной величине) помеху по обнару-
жению нежелательного ферромагнитного предмета от конгломерата ферромагнитных частиц.
ЗАКЛЮЧЕНИЕ
Выполнено сравнение модельных вариантов индукционного контроля потока ферромагнитных
частиц, движущихся по ленте транспортера, для случаев охвата контролем всей ширины ленты
(однородное намагничивание) и разбиения зоны контроля на несколько «дорожек» (намагничива-
ние неоднородным полем локального источника).
Экспериментально выявлено существенное влияние радиальной компоненты аксиально-сим-
метричного неоднородного намагничивающего поля на результат намагничивания ансамбля фер-
ромагнитных частиц.
Разбиение зоны контроля вихретоковым преобразователем на дорожки по ширине транспор-
терной ленты может обеспечить лучшую достоверность (при прочих равных условиях) выявления
нежелательных стальных предметов в потоке железной руды, по сравнению с контролем по всей
ширине ленты, лишь при соблюдении определенных соотношений ширины ленты транспортера и
размеров преобразователя.
Наиболее объективные рекомендации по выбору вариантов намагничивания могут быть полу-
чены лишь путем экспериментального масштабного моделирования с использованием вытянутых
контейнеров с ферромагнитными частицами, образующими слой, сравнимый по толщине с ши-
риной контейнера. Данное исследование явилось первым приближением, позволившим оценить
сложность задачи.
Результаты данной работы могут быть полезны для обеспечения защиты от повреждений до-
рогостоящего оборудования обогатительных фабрик черной металлургии.
Не исключены и другие практические применения полученных результатов.
Работа выполнена по бюджетной теме «Диагностика» (г.р. №АААА-А18118020690196-3).
СПИСОК ЛИТЕРАТУРЫ
1. Реутов Ю.Я. Обнаружители намагниченных предметов (теория и практика индукционного обна-
ружения). Екатеринбург: типография «Для Вас», 2018. 338 с.
2. Kostin V.N., Smorodinskii Ya.G. Multipurpose software-hardware systems for active electromagnetic
testing as a trend // Russian Journal of Nondestructive testing. 2017. V. 53. No. 7. P. 493—504. [Костин В.Н.,
Смородинский Я.Г. Многоцелевые аппаратно-программные системы активного электромагнитного
контроля как тенденция // Дефектоскопия. 2017. № 7. С. 23—34.]
3. Kostin V.N., Vasilenko O.N., Byzov A.V. DIUS-1.15M Mobile Hardware—Software Structuroscopy
System // Russian Journal of Nondestructive testing. 2018. V. 54. No. 9. P. 654—661. [Костин В.Н., Васи-
ленко О.Н., Бызов А.В. Мобильная аппаратно-программная система магнитной структуроскопии DIUS-
1.15M // Дефектоскопия. 2018. № 9. С. 47—53.]
4. Druyts Pascal and Acheroy Marc. Modeling the Response of Electromagnetic Induction Sensors to
Inhomogeneous Magnetic Soils with Arbitrary Relief // IEEE Transactions on Geoscience and Remote Sensing.
2009. V. 47. No 8. P. 2627—2638.
5. Huang Haoping and Won I.J. Electromagnetic detection of buried metallic objects using quad-quad
coductivity // Geophysics. 2004. V. 69. No. 6. November—Dezember. P. 1387—1393.
6. Бойко П.Ф., Титиевский Е.М., Тимирязев В.А. Технологические особенности эксплуатации, ре-
монта, восстановления и модернизации конусных дробилок большой единичной мощности // Горный
журнал. 2017. № 4. С. 71—75.
7. Щупов В.П., Моня Г.М., Ободан В.Я. Обобщение опыта защиты дробилок при помощи конвей-
ерных металлоискателей // Металлургическая и горнорудная промышленность. 2006. № 4. С. 97—100.
8. Тараканов Е.А. Исследование и разработка устройств контроля наличия посторонних металли-
ческих предметов в сырье и материалах горно-металлургического производства / Дисс. … канд. техн.
наук. Норильск, 2008. 149 с.
Дефектоскопия
№ 9
2019
38
Ю.Я. Реутов
9. Смотрицкая Б.И. Исследование метода опознавания опасных для дробилок металлических пред-
метов в потоке руды на обогатительных фабриках / Автореферат дис. … канд. техн. наук. Свердл. гор-
ный ин-т им. В. В. Вахрушева. Свердловск, 1970. 26 с.
10. Дортман Н.Б. (ред.). Физические свойства горных пород и полезных ископаемых / Справочник
геофизика. М.: Недра, 1984. 455 с.
11. Шинкоренко С.Ф. (ред.). Справочник по обогащению руд черных металлов. М.: Недра, 1980.
526 с.
12. Бида Г.В., Ничипурук А.П. Магнитные свойства термообработанных сталей. Екатеринбург:
УрО РАН, 2005. 218 с.
13. Реутов Ю.Я. Характеристика предмета, выявляемого по его магнитному полю // Дефектоско-
пия. 1998. № 2. С. 10—17.
14. Гринкевич Г.И. Магниторазведка. М.: Недра, 1987. 248 с.
15. Печенков А.Н., Щербинин В.Е., Шлеенков А.С., Булычев О.А. Точные формулы для расчета маг-
нитных 3D-полей некоторых однородно намагниченных постоянных магнитов // Дефектоскопия. 2018.
№ 11. С. 49—54.
16. Реутов Ю.Я. Ферромагнитный диск в постоянном аксиально-симметричном магнитном поле //
Дефектоскопия. 2015. № 3. С. 21—26.
Дефектоскопия
№ 9
2019