Электромагнитные методы
УДК 620.179.14
ГИСТЕРЕЗИСНАЯ ИНТЕРФЕРЕНЦИЯ МАГНИТНОГО ПОЛЯ
ПЕРЕМЕЩАЕМОГО ЛИНЕЙНОГО ИНДУКТОРА
© 2020 г. В.В. Павлюченко1, Е.С. Дорошевич1,*
1Белорусский национальный технический университет, Республика Беларусь
220013 Минск, пр-т Независимости, 65
E-mail: es_doroshevich@mail.ru
Поступила в редакцию 19.06.2019; после доработки 11.07.2019
Принята к публикации 26.07.2019
Проведены расчеты распределений электрического напряжения от координаты U(x), снимаемого с датчика магнит-
ного поля, при сканировании им магнитного носителя с записями импульсных магнитных полей линейного индуктора,
перемещаемого дискретно с заданным шагом над поверхностью магнитного носителя. Воздействие на магнитный носи-
тель осуществляли импульсами одного направления, а также импульсами в прямом и обратном направлении.
Характеристики датчиков магнитного поля, используемых в экспериментальных исследованиях, были выражены анали-
тическими функциями арктангенса. Представлены арктангенсные начальная кривая и гистерезисные ветви зависимости
электрического напряжения U(H), снимаемого с датчика магнитного поля, от напряженности магнитного поля при ска-
нировании им магнитного носителя и соответствующие распределениям остаточной намагниченности используемого
магнитного носителя в импульсном магнитном поле. Чувствительность датчиков магнитного поля, используемых при
расчетах, составляла γmax1 = 1,0 мВ∙см/А, γmax2 = 0,26 мВ∙см/А, γmax3 = 2,8 мВ∙см/А. Установлены последовательности
изменения остаточной намагниченности магнитного носителя при воздействии на него импульсами магнитного поля
одного направления и разнополярными импульсами. Гистерезисная интерференция представлена в виде интерференции
распределений электрического напряжения датчика в импульсном магнитном поле U(x) по координате x.
Представлены результаты расчетов величины электрического напряжения U, снимаемого с датчика, для слоев алю-
миниевой фольги толщиной порядка 0,05 мм гистерезисным и безгистерезисным методами. Показано, что применение
гистерезисной интерференции позволяет повысить чувствительность средств измерения в три и более раз.
Ключевые слова: импульс магнитного поля, арктангенс, магнитный носитель, гистерезисная интерференция, линей-
ный индуктор.
DOI: 10.31857/S0130308220010066
ВВЕДЕНИЕ
Развиваемые нами методы контроля параметров объектов [1—5] содержат составные части
других известных методов контроля. Наиболее близок к ним вихретоковый метод. Из современ-
ных публикаций выделим работы [6—9]. Метод достиг высокого уровня развития и имеет много
преимуществ перед другими методами. К ним относятся высокие чувствительность, разрешение и
быстродействие. Однако этот метод не позволяет вести контроль свойств объектов в реальном
масштабе времени на значительных поверхностях объектов, получать картины мгновенных рас-
пределений магнитных полей (сигнала преобразователя магнитного поля) одновременно на боль-
ших контролируемых площадях и обладает рядом других недостатков. Эффективным для контро-
ля толщины металлических покрытий является магнитодинамический метод [10]. Наибольшей
разрешающей способностью и другими преимуществами обладает магнитографический метод
контроля [11, 12]. Поэтому целесообразно развивать этот метод путем устранения его недостатков,
к которым относятся: невозможность получения информации об объектах в реальном масштабе
времени, контактное считывание с магнитного носителя (МН) преобразователями магнитного
поля и др. недостатки. При этом необходимо использовать ярко выраженные гистерезисные свой-
ства магнитного носителя, например, как это сделано в [13, 14].
Актуальным является контроль электрических и магнитных свойств объектов, а также дефек-
тов сплошности в них при сканировании поверхности объекта с прижатым к нему магнитным
носителем, перемещаемым магнитным индуктором. При этом происходит перекрытие зон воздей-
ствия импульса магнитного поля остаточно намагниченных участков магнитного носителя, под-
вергшихся воздействию предыдущих импульсов. Этот процесс следует рассчитать как для случая
однополярных импульсов линейного индуктора, так и с учетом гистерезисной интерференции
магнитного поля (HI), то есть при воздействии на объект с МН разнополярными импульсами маг-
нитного поля.
Таким образом, целью настоящей работы является проведение расчетов распределений элек-
трического напряжения, снимаемого с преобразователя магнитного поля, сканирующего магнит-
52
В.В. Павлюченко, Е.С. Дорошевич
ный носитель, и соответствующих им распределениям остаточных магнитных полей магнитного
носителя, полученным в результате воздействия на объект с магнитным носителем импульсами
одной полярности магнитного поля перемещаемого линейного индуктора, а также разнополярны-
ми импульсами.
ОСНОВНЫЕ РЕЗУЛЬТАТЫ
Теоретические расчеты основаны на экспериментальных результатах гистерезисной интерфе-
ренции на магнитном носителе в импульсных магнитных полях [1] с помощью дискретных датчи-
ков магнитного поля (ДДМП), состоящих из отдельных полос магнитного носителя. При этом
снимали величину электрического напряжения U на выходе магнитной головки, сканирующей
ДДМП с выводом электрического сигнала на цифровой осциллограф и далее — на монитор.
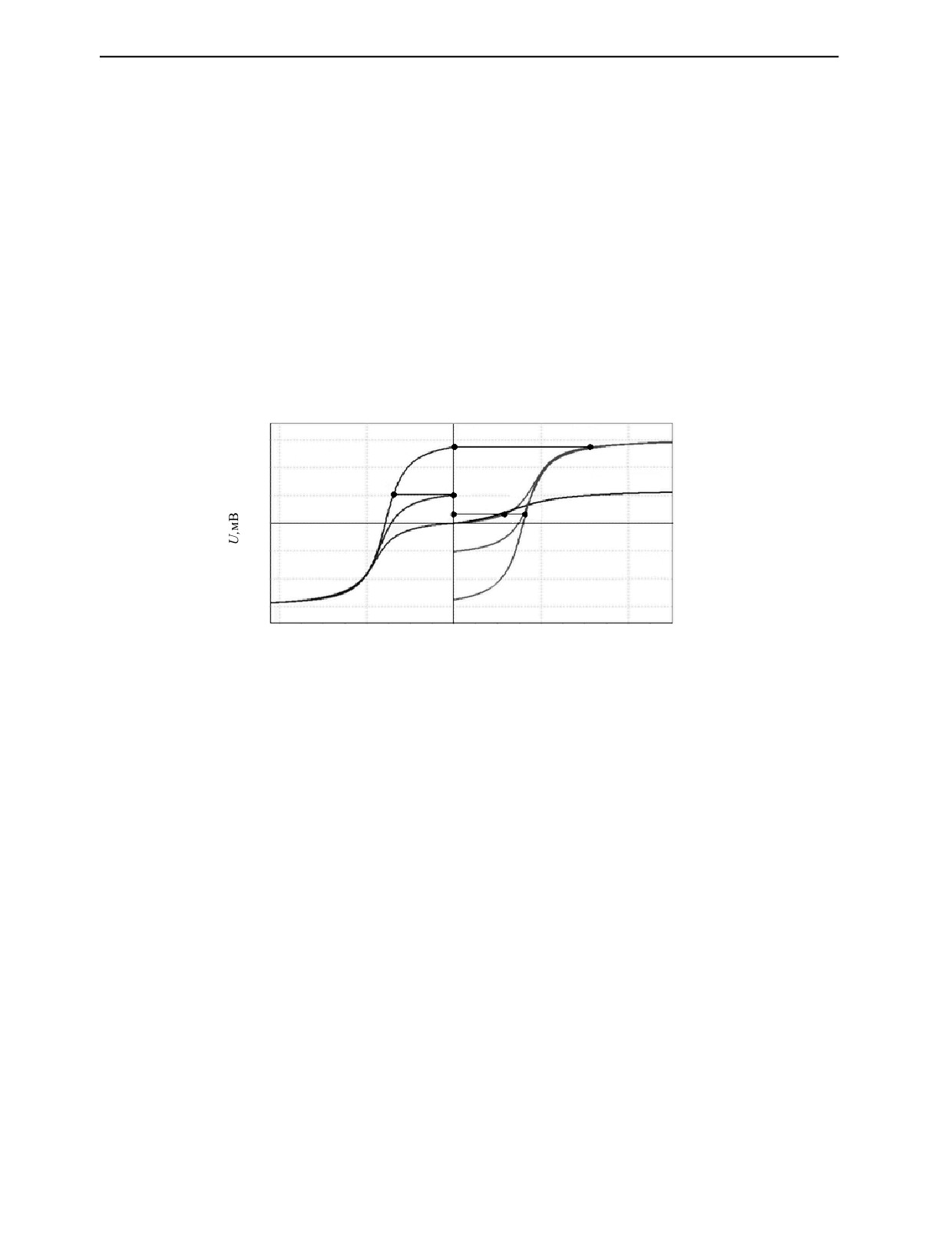
На рис.1 изображены расчетные зависимости U(H) при намагничивании МН в прямом (1—3, 7)
и обратном (4—6, 9) направлениях в режиме остаточного намагничивания магнитного носителя.
Здесь также показаны точки пересечения отрезков прямых, параллельных оси абсцисс 8—14,
с зависимостями U(H). На рис.1 обозначены четыре области изменения аргумента H и функции U:
первая четверть (1Ч), вторая четверть (2Ч), третья четверть (3Ч), четвертая четверть (4Ч).
12
11
150
6
2Ч
1Ч
100
5
13
14
7
50
1
10
9
8
0
4
-50
2
3Ч
4Ч
–100
3
-150
-400
-200
0
200
400
H,А/см
Рис.1. Расчетная зависимость величины электрического напряжения, снимаемого с индукционной магнитной головки,
от напряженности воздействующего магнитного поля U(H).
Начальная кривая 1 U1(H) используемого магнитного носителя, полученная из размагниченно-
го состояния МН, как найдено авторами, представлена в виде функции арктангенс и для положи-
тельных значений H описывается как
U1 = 70,4 + 51,7arctg(0,026H - 4,75),
(1)
а зависимости из намагниченного состояния в прямом направлении магнитного поля представле-
ны формулой:
U2 = 70,4 + 0,52U1 + (51,7 + 0,352U1) arctg ((0,026 + 0,00003 U1) H + 4,75 - 0,001U1).
(2)
Для прямых зависимостей 2 и 3 исходные значения U1 составляют соответственно:
–50,68 и -137,36 мВ.
Графики 4—6 расчетных зависимостей U(H) при намагничивании МН в обратном направлении
получены по формулам (1) и (2) с учетом противоположного направления напряженности магнит-
ного поля. На рис.1 показан также график 7 зависимости U(H) для магнитного носителя, выпол-
ненного в виде ДДМП и обладающего меньшей чувствительностью. Расчет произведен в интерва-
ле напряженности магнитного поля -1000 А/см ≤ H ≤ 1000 А/см. Электрическое напряжение
выражено в милливольтах, а напряженность магнитного поля — в А/см.
Как видно из рис.1, максимальная чувствительность при измерении используемого в данной
работе магнитного носителя в четыре раза больше максимальной чувствительности, полученной
при измерении с помощью дискретного датчика. Так, максимальная крутизна кривой 1 на рис.1
составляет γmax1 = 1,0 мВ∙см/А, а кривой 7 — γmax2 = 0,26 мВ∙см/А.
Дефектоскопия
№ 1
2020
Гистерезисная интерференция магнитного поля перемещаемого линейного индуктора
53
В данном случае находили чувствительность средств измерения, включающих магнитный
носитель, индукционную магнитную головку, цифровой осциллограф и монитор. Основное влия-
ние на чувствительность оказывают параметры индукционной головки и магнитного носителя.
Чувствительность магнитной головки зависит от магнитных свойств материала ее сердечника,
ширины его зазора и количества витков головки. Указанные параметры определяют коэффициент
усиления головки и ее инерционные свойства. Чем больше индуктивность магнитной головки, тем
медленнее она реагирует на изменение пересекаемых ею магнитных полей при сканировании маг-
нитного носителя. В результате чувствительность используемых средств измерения уменьшается
с уменьшением ширины магнитных полос дискретного датчика.
Максимальная расчетная чувствительность при измерении на обратной ветви 6 (см. рис.1)
является наибольшей для указанного магнитного носителя и составляет γmax3 = 2,8 мВ∙см/А.
Используемые в работе гистерезисные ветви U(H), соответствующие ветвям остаточного
намагничивания МН, существенно отличаются от статических и динамических ветвей и работа-
ют следующим образом. В результате воздействия импульсом магнитного поля магнитный носи-
тель намагничивается и после прекращения действия импульса остается остаточно намагни-
ченным. Пусть величина U, соответствующая этой остаточной намагниченности МН на графике
(см. рис.1) зависимости U(H), находится в точке 11. Этой точке соответствует исходная точка 12
обратной зависимости 6. Если в результате воздействия обратным импульсом достигнута точка
13 на графике этой зависимости, то после окончания действия импульса она переходит в точку
14. При последующем воздействии на МН обратным импульсом величина намагниченности МН
будет определяться в соответствии с обратной кривой 6 ниже точки 13. Если же достигнута
точка 9 и надо применить импульс магнитного поля в прямом направлении, то никакого измене-
ния намагниченности МН не будет до тех пор, пока величина напряженности магнитного поля
не достигнет величины, необходимой для перехода в состояние, соответствующее точке 10
начальной кривой 1. При большей амплитуде импульсного магнитного поля прямого направле-
ния величина U достигнет значения на начальной кривой выше точки 10. В случае прямого
импульса из начального состояния зависимости 3, выводящего сигнал на уровень 8, обратная
зависимость, обусловленная воздействием второго обратного импульса, будет начинаться
в точке 9.
Таким образом, изменение сигнала U(H) на рис.1, характеризующего остаточные ветви гисте-
резиса с обозначением намагниченности в прямом «+» направлении и обратном «-» направлении,
для арктангенсовых и других возрастающих (убывающих) зависимостей можно описать следую-
щим образом.
Первая четверть (на рис.1 обозначена 1Ч): H ≥ 0, U ≥ 0.
Изменение U из размагниченного состояния МН с увеличением H осуществляется в соответ-
ствии с прямой «+» начальной зависимостью (зависимость 1 на рис.1).
С увеличением H из «-» состояния при H ≤ 0 — продолжение зависимостей третьей четверти
(продолжение зависимостей 2 и 3, первая четверть на рис.1).
С увеличением H из «+» состояния (из второй четверти) при H ≥ 0 — в диапазоне от H = 0
до H = H1, где H1 — точка пересечения горизонтальной прямой с начальной зависимостью 1,
величина напряжения U = U1. Для арктангенсовой зависимости 1, изображенной на рис.1, находим
U
−70,4
1
величину
H
=184,6+38,46tan
1
51,7
С увеличением H из «+» состояния при H ≥ H1 величина U изменяется в соответствии с началь-
ной зависимостью U(H). Для используемой арктангенсовой зависимости это кривая 1 на рис.1.
Вторая четверть (2Ч): H ≤ 0, U ≥ 0.
С уменьшением H величина U уменьшается согласно обратным зависимостям. На рис.1 это
обратные зависимости 5, 6.
Третья четверть (3Ч): H ≤ 0, U ≤ 0.
Изменение величины U осуществляется согласно обратной начальной зависимости, получен-
ной из размагниченного состояния. На рис.1 это зависимость 4.
Продолжение зависимостей из «+» состояний второй четверти. Это зависимости 5 и 6 на рис.1.
Получение исходных точек прямых зависимостей из «-» состояний. На рис.1 это исходные
точки зависимостей 2 и 3.
Четвертая четверть (4Ч) H ≥ 0, U ≤ 0.
Изменение величины U в соответствии с прямыми зависимостями из «-» намагниченных
состояний, в том числе зависимостями 2, 3 на рис.1.
Дефектоскопия
№ 1
2020
54
В.В. Павлюченко, Е.С. Дорошевич
Импульсное магнитное поле создавали с помощью линейного индуктора. Тангенциальную
составляющую напряженности магнитного поля индуктора рассчитывали по формуле:
H = А / (x2 + b),
(3)
где А — постоянная; x — расстояние в сантиметрах до проекции оси индуктора в плоскости изме-
рения; b — расстояние в сантиметрах от оси индуктора до магнитного носителя.
Воздействуем на слой фольги из алюминия толщиной 0,05 мм с прижатым к ней МН импуль-
сом магнитного поля линейного индуктора с временем нарастания t max =1,8·10-5 с и амплитудой
132 А/см. Тогда, согласно результатам, изложенным в [1], напряженность суммарного магнитного
поля вблизи поверхности фольги будет равна 164 А/см. Для фольги толщиной 0,055 мм эта напря-
женность составила 167,2 А/см. В результате воздействия (рис. 2) получаем графики 1 (164 А/см)
и 2 (167,2 А/см) расчетных зависимостей величины электрического напряжения U(x), снимаемого
с датчика магнитного поля, сканирующего магнитный носитель. На рис. 2 показаны расчетные
1—10 зависимости U(x), полученные после воздействия на МН с слоями фольги однополярным
импульсом магнитного поля линейного индуктора 1, 2, 5, 6, 9, 10 и двумя разнополярными импуль-
сами с получением гистерезисной интерференции 3, 4, 7, 8.
100
75
2
1
50
7
8
25
5
6
0
9
10
-25
3
4
0
5
10
15
20
x, см
Рис. 2. Расчетные зависимости напряжения U(x), снимаемого с датчика магнитного поля.
При использовании гистерезисной интерференции (HI) сначала воздействовали на МН с алю-
миниевой фольгой импульсом магнитного поля в прямом направлении амплитудой 416,7 А/см.
После этого воздействовали на фольгу с МН вторыми импульсами магнитного поля линейного
индуктора с амплитудами
-164 и -167,2 А/см (обратные ветви гистерезиса). В результате полу-
чили графики 3 и 4 (см. рис. 2) с амплитудами электрического напряжения примерно в 3 раза
большими, чем амплитуды сигналов 1 и 2.
Как следует из рис. 1 (зависимость 1), безгистерезисные кривые 1 и 2 на рис. 2 получены при
максимальной чувствительности МН в прямом направлении намагничивания (γmax1 = 1,0 мВ∙см/А).
Сравним результаты измерений при работе в интервале полей, где максимальная чувствитель-
ность МН в прямом направлении составляет γmax2 = 0,26 мВ∙см/А. Если амплитуды импульсов в
прямом направлении равны 101,1 и 106,7 А/см, тогда величины электрического напряжения датчи-
ка поля будут соответствовать кривым 5 и 6 на рис. 2. В случае использования гистерезисной интер-
ференции сначала воздействуем на МН с алюминиевой фольгой импульсом магнитного поля в
прямом направлении амплитудой 166,7 А/см, а затем импульсами противоположной полярности
амплитудами -101,1 и -106,7 А/см. В результате получаем кривые 7 и 8 на рис. 2. Зависимости 7 и
8 должны содержать центральные пики отрицательной полярности, аналогичные пикам 3 и 4, но
значительно меньшей величины. Однако этих пиков нет. Изменение величины напряжения с увели-
чением расстояния от проекции оси линейного индуктора на МН компенсируется изменением в
противоположную сторону величины электрического напряжения на обратной ветви гистерезиса.
Таким образом, гистерезисная интерференция проявляется в неявном виде: амплитуды 7 и 8 напря-
жения уменьшаются, но не содержат центральных максимумов. Если бы гистерезисная интерфе-
ренция отсутствовала, то максимум напряжения 8 был бы больше, чем максимум напряжения 7,
также как и максимум сигнала 10 (по абсолютной величине) больше максимума сигнала 9.
Дефектоскопия
№ 1
2020
Гистерезисная интерференция магнитного поля перемещаемого линейного индуктора
55
40
2
20
2
1
-20
0
2
4
6
x, см
Рис. 3. Расчетная зависимость U(x), полученная в результате алгебраических операций.
Преимущества гистерезисной интерференции при измерении напряженности магнитных
полей заключаются не только в увеличении сигнала датчика магнитного поля, но и в возможностях
обработки полученной информации. Графики зависимостей, изображенные на рис. 3, получены в
результате алгебраических операций усиления сигнала и смещения нулевого уровня (на 26 и
-26 мВ для графиков прямых и зеркальных функций соответственно), а также установления нуле-
вого уровня любого начального измерения (в данном случае, нулевого уровня для образца из алю-
миниевой фольги 0,05 мм). Нулевой уровень первого максимума второго порядка 1 (см. рис. 3)
соответствует напряженности магнитного поля 164 А/см. Максимум 3 (см. рис. 2) становится
равным нулю и переходит в первый минимум 1 (см. рис. 3) интерференционной картины.
Величина первого максимума 2 (см. рис. 3), соответствующая напряженности 167,2 А/см, равна
33 мВ. Таким образом, интервал измерения составляет (0—33) мВ.
Пусть линейный индуктор перемещается над поверхностью магнитного носителя и воздей-
ствует на него импульсами магнитного поля в моменты времени, соответствующие смещению оси
индуктора на расстояние 1,8; 3,6; 5,4; 7,2 см (шаг смещения 1,8 см). Графики функции (1) с ука-
занными смещениями представлены на рис. 4. При намагничивании МН в одном направлении
действует найденное ранее правило, согласно которому с увеличением H из «+» состояния вели-
чина электрического напряжения U1 датчика магнитного поля (величина остаточной намагничен-
ности) в данной точке МН остается неизменной до тех пор, пока величина напряжения U2, достиг-
нутая в результате действия последующего импульса, не достигнет величины U1. Далее, с увели-
чением напряженности магнитного поля электрическое напряжение изменяется в соответствие с
начальной кривой намагничивания U(H). Поэтому в результате воздействия пятью импульсами
магнитного поля на участки МН с отличной величиной U имеют только графики U(H) для первого
(начало графика 1) и пятого (конец графика 5) импульсов. При этом должен выполняться ряд дру-
гих условий: задан интервал времени нарастания импульсов, задан диапазон значений напряжен-
ностей магнитных полей.
60
1
2
3
4
5
40
20
0
0
2
4
6
8
10
x, см
Рис. 4. Расчетные зависимости U(x), полученные при перемещении линейного индуктора над МН.
Дефектоскопия
№ 1
2020
56
В.В. Павлюченко, Е.С. Дорошевич
Таким образом, при воздействии импульсами одного направления в каждой точке МН остается
максимальный уровень сигнала, достигнутый при воздействии одним из импульсов независимо от
их последовательности.
Теперь пусть линейный индуктор перемещается над поверхностью магнитного носителя и воз-
действует на него с заданным шагом двумя импульсами магнитного поля.
Напряженность магнитного поля первого импульса задавали как
H1= 144 / (x2 + 0,36) ,
(4)
а напряженность магнитного поля второго импульса в обратном направлении:
H2 = -43,2/ (x2 + 0,36).
(5)
Последующие воздействия осуществляли со смещением координаты x на 1,8 см, в каждой
точке воздействуя на МН двумя импульсами. Зависимость величины электрического напряжения,
снимаемого с датчика магнитного поля с максимальной чувствительностью γmax2 = 0,26 мВ∙см/А
при воздействии на МН одним импульсом магнитного поля в прямом направлении, определяли по
формуле:
U5= 23,5+24,3 arctg (0,011H1 -1,45) ,
(6)
а зависимость величины электрического напряжения при воздействии на МН одним импульсом
магнитного поля H1 в прямом направлении и вторым обратным импульсом H2 находили как
U6 = -23,5+0,61U5+(24,5+0,40U5)arctg((0,011+,000087U5) H2+,45-0,0016U5).
(7)
Путем построения зеркальных функций и введения в соответствие уровней оттенков серого
каждому фрагменту сформированы оптические изображения остаточных магнитных полей, полу-
ченных при перемещении линейного индуктора над поверхностью МН.
Оптические изображения магнитных полей сформированы для каждого положения индуктора
и представлены пятью фрагментами с максимумами первого порядка 1—5 и нулевыми максиму-
мами второго порядка 6—10 на рис. 5. Изображение каждого последующего фрагмента получено
независимо от предшествующих воздействий. При получении третьего фрагмента увеличена
амплитуда первого импульса на 10 %, а при получении четвертого фрагмента увеличена амплиту-
да второго импульса на 10 %. В результате произошло изменение амплитуды третьего фрагмента:
нулевого максимума 8 — с 24 до 50 мВ, а максимумов первого 3 порядка — с 40 до 30 мВ.
Изменение амплитуды четвертого фрагмента составило: нулевой максимум 9 увеличился с 24 до
45 мВ, максимумы первого порядка 4 уменьшились с 40 до 16 мВ.
60
40
1
2
3
4
5
20
0
-20
6
7
9
10
8
0
2
4
6
8
10
x, см
Рис. 5. Оптические изображения магнитных полей, создаваемых перемещаемым индуктором, два импульса магнитного
поля.
Согласно характеристике 7 (см. рис. 1) магнитного носителя, используемого при построении
оптических изображений на рис. 5, увеличение напряженности магнитного поля на 10 % с 150 до
165 А/см (участок с максимальной крутизной) ведет к увеличению напряжения на выходе датчика
с 28,4 до 32,8 мВ, то есть в 1,15 раза. Расчет произведен по формуле (6).
Дефектоскопия
№ 1
2020
Гистерезисная интерференция магнитного поля перемещаемого линейного индуктора
57
Таким образом, увеличению напряженности магнитного поля в 1,1 раза соответствует увели-
чение электрического напряжения, снимаемого с датчика магнитного поля, в 1,15 раза без исполь-
зования гистерезиса и в 2 раза с использованием гистерезиса, то есть чувствительность измерения
увеличилась примерно в 7 раз.
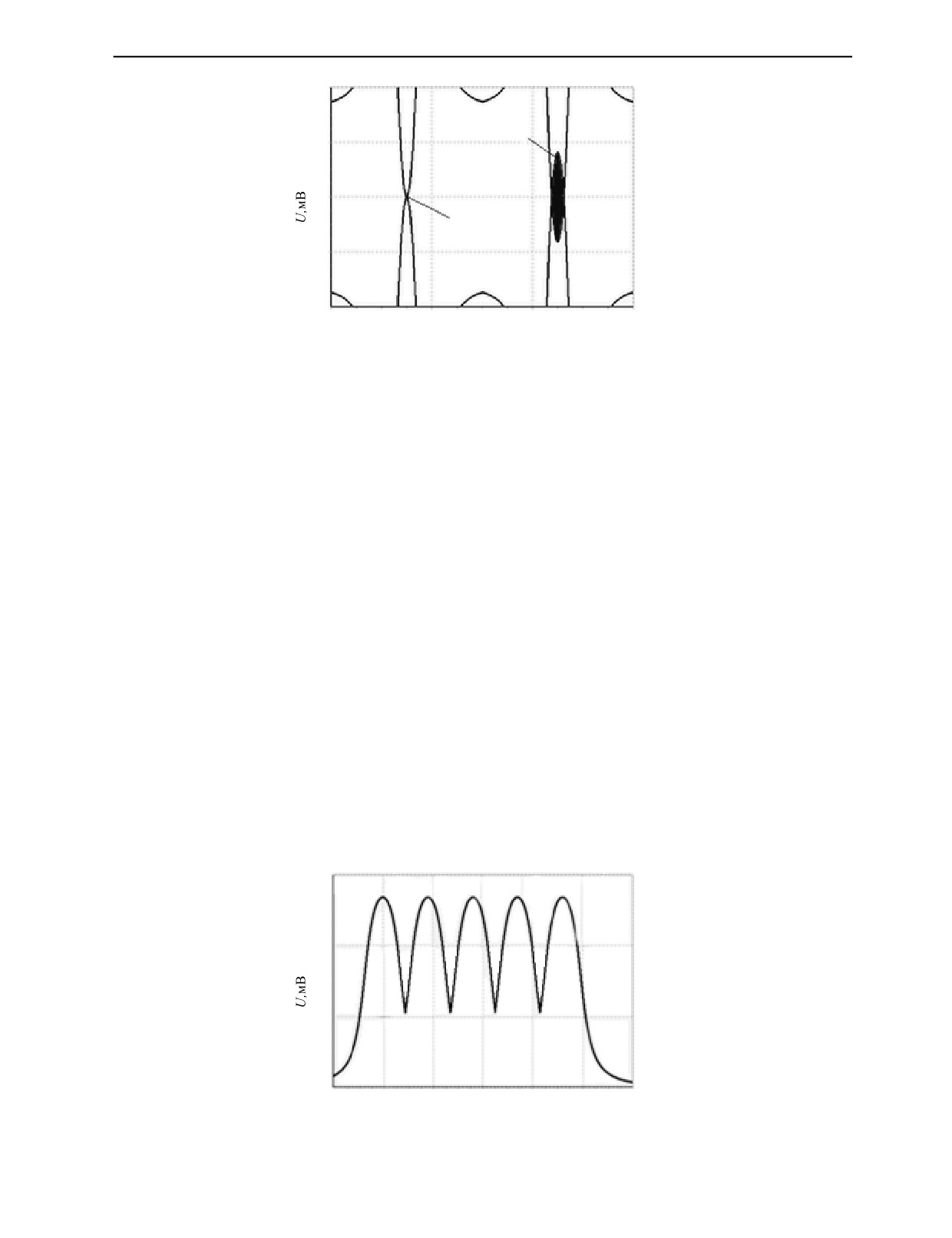
Сравним разработанный метод расчета магнитных полей с экспериментально полученными
результатами. На рис. 6 показаны зависимости амплитуды электрического сигнала, снимаемого с
магнитной головки, сканирующей дискретный датчик магнитного поля, от времени развертки циф-
рового осциллографа U(t), полученные при воздействии на датчик двумя разнополярными импуль-
сами магнитного поля с разными параметрами. ДДМП установлен на пластинах из свинца толщи-
ной 0,8 мм (рис. 6а) и 0,6 мм (рис. 6б). В результате получены три максимума на рис. 6а: 1, 5 —
первые максимумы первого порядка и 3 — нулевой максимум второго порядка (на проекции оси
линейного индуктора на МН). Здесь также показаны два первых минимума первого порядка 2 и 4.
а
б
1
5
1
3
50
50
3
2
0
0
2
4
–50
-50
0
1
2
0
1
2
t, мс
t, мс
Рис. 6. Зависимость U(t), воспроизведенная индукционной МГ:
а — для пластины из свинца толщиной 0,8 мм; б — для пластины из свинца толщиной 0,6 мм.
На рис. 6б обозначены два первых максимума первого порядка 1 и 3 и нулевой минимум 2 перво-
го порядка. Основное отличие этих двух рисунков состоит в том, что участок датчика, соответству-
ющий максимуму 3 (рис. 6а), был намагничен дважды. В результате воздействия вторым импульсом
направление намагниченности в нем поменялось на противоположное и величина U составила
35 мВ. Это подтверждается наличием минимумов 2 и 4 сигнала с двух сторон от максимума 3.
Окончательное направление намагничивания этого участка можно определить также по поляр-
ностям сигнала от краев каждой магнитной полосы ДДМП (двухполярные пики сигнала на рис. 6).
В результате воздействия на ДДМП вторым импульсом магнитного поля с меньшей амплитудой весь
датчик, сигнал с которого показан на рис. 6б, остался намагничен в одном направлении (в направле-
нии, полученном в результате воздействия первым импульсом). При этом намагниченность ДДМП
на проекции оси индуктора уменьшилась и вместо максимума сигнала на проекции оси индуктора
возник нулевой минимум 2 первого порядка c U = 0. Разработанный метод HI позволяет рассчиты-
вать распределения сигнала с получением все новых и новых максимумов и минимумов.
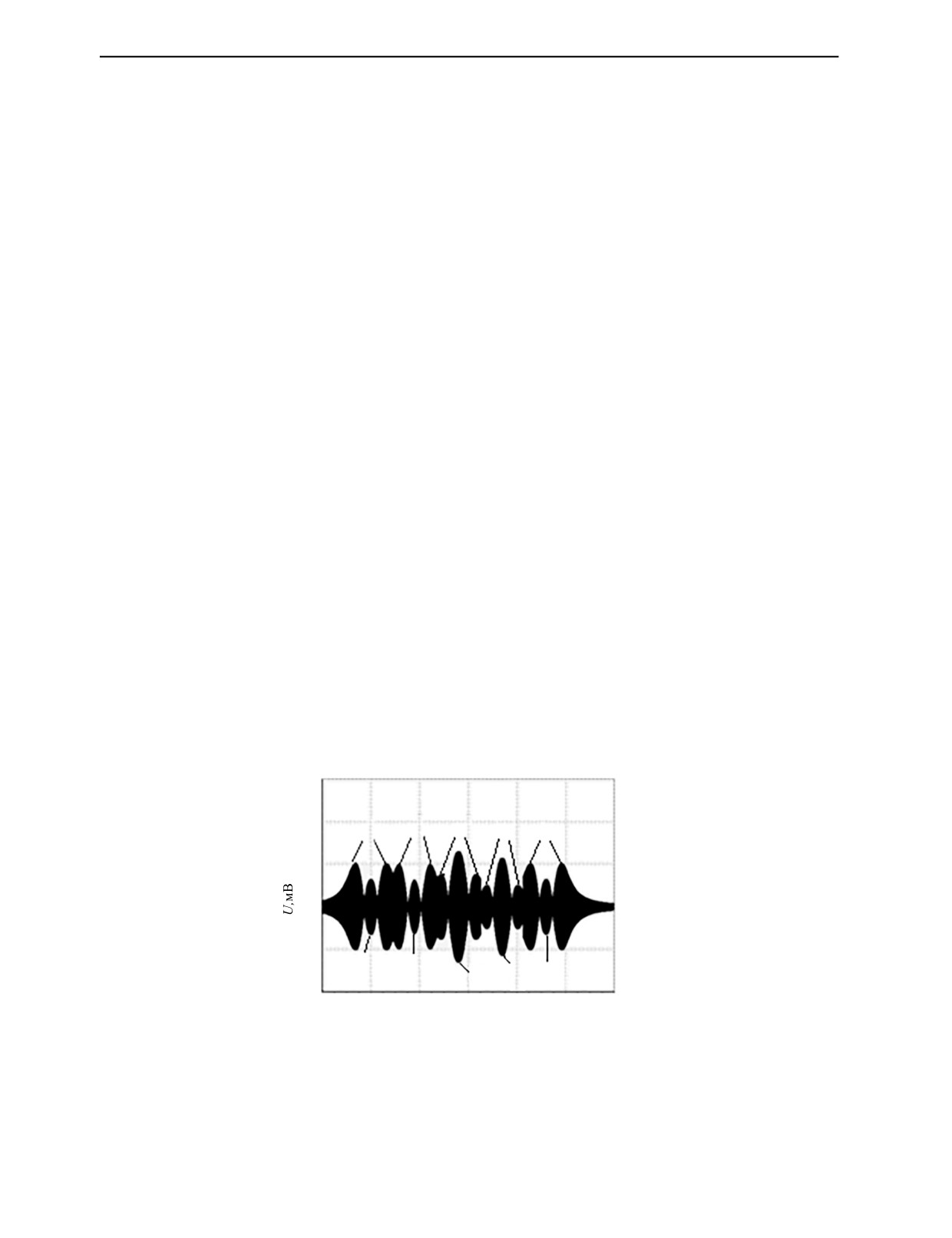
Так, на рис. 7 изображены прямая 1 и обратная 2 расчетные зависимости U(x) электрического
напряжения, снимаемого с датчика магнитного поля, от расстояния x до проекции оси линейного
источника импульсного магнитного поля на магнитный носитель. Зависимость 1 на рис. 7 каче-
ственно совпадает с огибающей линией дискретной фигуры на рис. 6б при величине напряжения
больше нуля (верхняя половина графика). В результате операций вычисления, проведенных с пря-
мой 1 и обратной 2 функциями, получены фигуры, изображенные на рис. 7 с первыми максимума-
ми второго порядка 4, 8 и нулевым максимумом третьего порядка 6, позволяющими повысить
точность измерений. При этом никакого перемагничивания датчика с изменением полярности
намагничивания не было осуществлено. Такое перемагничивание логично назвать виртуальным и
полученную гистерезисную интерференцию — также виртуальной. Виртуальную HI можно при-
менять сколько угодно раз к одним и тем же распределениям, используя естественные или создан-
ные искусственно неоднородности распределений напряжения по координатам и таким образом
повышать чувствительность и точность измерений. Так, в результате применения алгебраических
операций к функциям распределения на рис. 7, в том числе к участкам МН, соответствующим
Дефектоскопия
№ 1
2020
58
В.В. Павлюченко, Е.С. Дорошевич
10
2
6
5
4
8
0
3
5
7
9
-5
1
-1
-0,5
0
0,5
1
x, см
Рис.7. Прямая и обратная расчетные зависимости напряжения U(x), снимаемого с датчика магнитного поля.
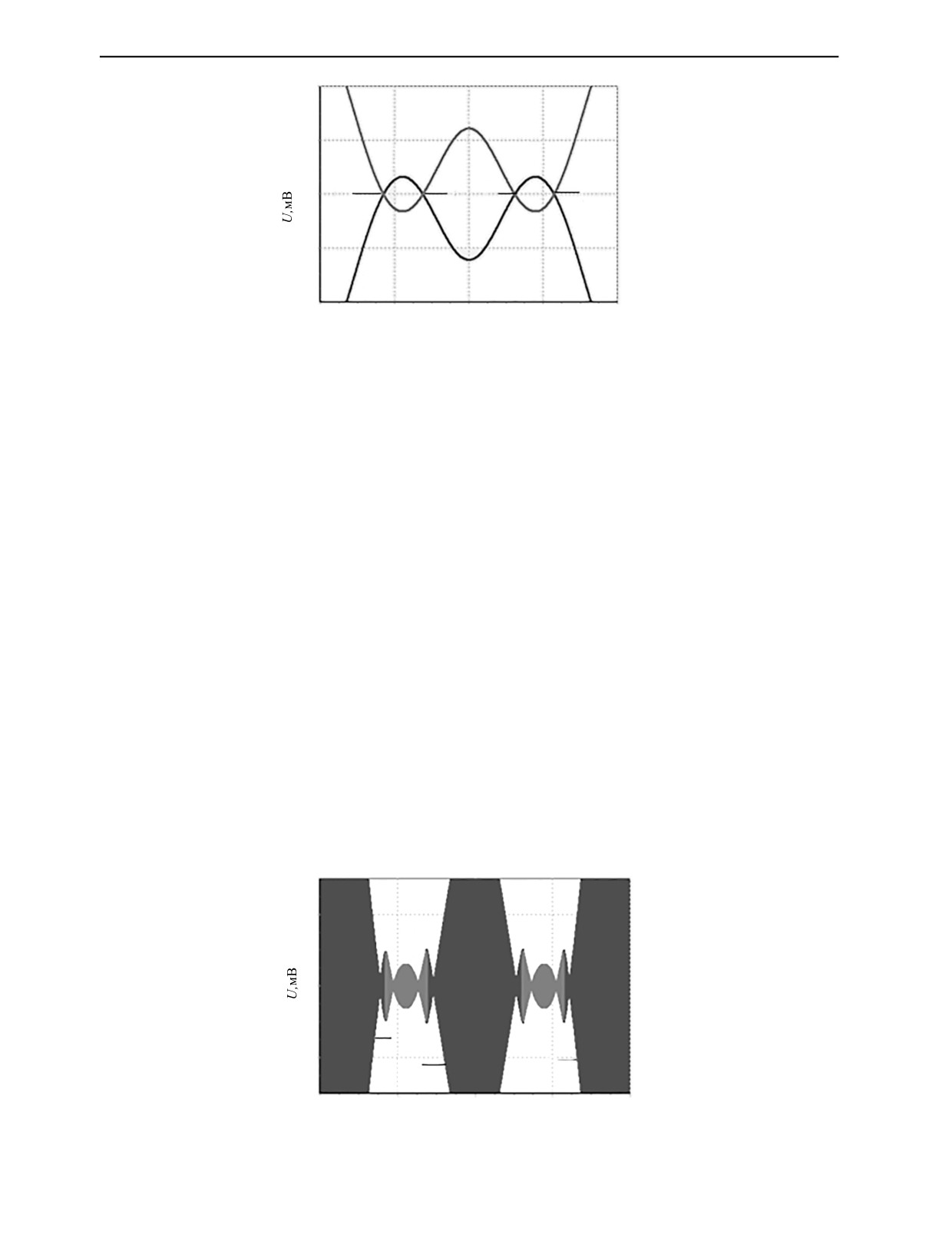
точкам 3, 5, 7 и 9, получаем оптические изображения распределений магнитных полей U(x), пока-
занные на рис. 8. Здесь участок 2 соответствует положению максимума 6 (см. рис. 7), участки 1 и
3 — крайней правой и крайней левой фигурам на рис. 7. Получать указанные оптические изобра-
жения магнитных полей и вести обработку полученной информации можно разными способами с
использованием магнитного носителя, магнитооптической пленки, пленочного флюкс-детектора и
др. пленочных датчиков. С помощью преобразователя оптического изображения в электрический
сигнал или магнитной головки считываем изображения магнитных полей пленочных датчиков
(вид сверху) и записываем их на элементы памяти в виде распределений электрического напряже-
ния. При этом уровни оттенков серого (цветности) вводим в соответствие величине электрическо-
го напряжения датчика и получаем оптические изображения магнитных полей, которые в отличие
от оптических изображений на рис. 5 и рис. 8 окрашены не в один цвет, а являются многоцветны-
ми. Например, максимум сигнала 6 на рис. 7 (6,5 мВ) выделяем красным цветом в горизонтальной
полосе от 6,4 до 6,5 мВ, а полосе от 6,3 мВ до 6,4 мВ этого гистерезисного максимума вводим в
соответствие уровень желтого цвета и так далее. Таким образом, вид сверху этого неоднородного
распределения магнитного поля будет представлять собой многоуровневую полосатую цветную
картину. После этого осуществляем операции вычисления по строкам и кадрам с усилением и
сложением сигналов по одним и тем же точкам растрового разложения и осуществляем оптималь-
ное выделение изображения поля неоднородности из полного изображения магнитных полей,
содержащего также изображение поля фона.
Разработанным методом гистерезисной интерференции можно выделять магнитные поля
локальных дефектов сплошности и структурных неоднородностей. При этом используют источ-
ник однородного магнитного поля, например, одну из сторон плоской катушки. Тогда оптиче-
ские изображения импульсных магнитных полей дефектов будут подобны описанным выше
оптическим изображениям полей линейного индуктора. В случае использования магнитного
носителя съем информации можно осуществлять с помощью индукционной магнитной головки,
2
4
6
7
9
5
8
0
1
-2
2
3
-1
-0,5
0
0,5
1
x, см
Рис. 8. Оптические изображения распределений магнитных полей U(x).
Дефектоскопия
№ 1
2020
Гистерезисная интерференция магнитного поля перемещаемого линейного индуктора
59
что позволяет достигать максимальной чувствительности при измерении магнитных полей.
Мгновенные фотографии изображений магнитных полей можно получать также в режиме, близ-
ком к режиму реального времени, если производить съем информации с МН с помощью при-
жатой к нему и к объекту магнитооптической пленки или других пленочных детекторов.
Например, импульсом магнитного поля с временем нарастания порядка 2,0·10-5 с и несколькими
обратными выбросами поля можно получить распределение остаточной намагниченности МН.
Оптическое изображение магнитного поля дефекта (полосатое) с видом сверху, соответствую-
щее этому распределению остаточной намагниченности МН, можно получить примерно в тече-
ние такого же промежутка времени в виде изображения доменной структуры магнитооптической
пленки в поляризованном свете. Повысить чувствительность магнитооптической пленки к выяв-
лению дефектов можно путем воздействия на пленку с МН магнитным полем напряженностью
в несколько А/см, выводящим пленку в рабочее состояние и не оказывающим никакого влияния
на распределение остаточной намагниченности МН. По полученным пространственным распре-
делениям уровней сигнала и параметрам воздействующих полей первичного источника можно
создать образ дефекта и после проведенных расчетов изобразить этот дефект на экране в одном
масштабе с оптическим изображением магнитных полей и изображением поверхности контро-
лируемого объекта. Получать гистерезисные распределения магнитных полей дефектов можно
непосредственно на магнитооптической пленке без МН.
ВЫВОДЫ
Проведены исследования гистерезисной интерференции импульсного магнитного поля на
магнитном носителе (МН), создаваемой перемещаемым линейным индуктором. За основу взяты
характеристики датчиков магнитного поля, используемых в экспериментальных исследованиях,
которые были выражены аналитическими функциями. Начальная кривая и гистерезисные ветви
зависимости U(H) электрического напряжения, снимаемого с датчика магнитного поля при скани-
ровании им магнитного носителя, от напряженности магнитного поля представлены в виде функ-
ции арктангенс. Чувствительность датчиков магнитного поля, используемых при расчетах, состав-
ляла γmax1 = 1,0 мВ∙см/А, γmax2 = 0,26 мВ∙см/А, γmax3 = 2,8 мВ∙см/А.
Зависимости U(H) соответствуют зависимостям остаточной намагниченности используемого
магнитного носителя от напряженности импульсного магнитного поля. Определение характери-
стик МН произведено в интервале напряженности магнитного поля -1000 А/см ≤ H ≤ 1000 А/см.
Расчеты проведены для случая, когда расстояние от оси линейного индуктора до поверхности
магнитного носителя составляло 0,6 см. Произведены расчеты гистерезисных остаточных ветвей
U(H) при воздействии на магнитный носитель разнополярными импульсами магнитного поля с
учетом исходной для каждой ветви полярности сигнала U.
На основании проведенных расчетов получены графики функций U(x) для линейного индук-
тора, перемещаемого дискретно с заданным шагом над поверхностью магнитного носителя при
воздействии на МН импульсами одного направления, а также импульсами в прямом и обратном
направлениях магнитного поля. Полученные распределения преобразованы в оптические изобра-
жения остаточных магнитных полей. Представлены результаты измерения толщины образцов из
алюминиевой фольги толщиной порядка 0,05 мм гистерезисным и безгистерезисным методами.
Показано, что применение гистерезисной интерференции позволяет повысить чувствительность
средств измерения в три и более раз.
СПИСОК ЛИТЕРАТУРЫ
1. Павлюченко В.В., Дорошевич Е.С. Неразрушающий контроль объектов из электропроводящих
материалов в импульсных магнитных полях // Дефектоскопия.
2010. № 11. С. 29—40.
2. Павлюченко В.В., Дорошевич Е.С. Использование магнитного гистерезиса при контроле объектов
из электропроводящих материалов в импульсных магнитных полях // Дефектоскопия. 2013. № 6.
С. 53—68.
3. Павлюченко В.В., Дорошевич Е.С., Пивоваров В.Л. Расчет распределений остаточных магнитных
полей при гистерезисной интерференции импульсного магнитного поля // Дефектоскопия. 2015. № 1.
С. 11—20.
4. Pavlyuchenko V.V., Doroshevich E.S. et al. Calculating Distributions of Pulsed Magnetic Fields under
Hysteretic Interference // Russian Journal of Nondestructive Testing. 2018. V. 54. No. 2. P. 121—127.
[Павлюченко В.В., Дорошевич Е.С., Пивоваров В.Л. Расчеты распределений импульсных магнитных
полей при гистерезисной интерференции // Дефектоскопия. 2018. № 2. С. 41—47.]
Дефектоскопия
№ 1
2020
60
В.В. Павлюченко, Е.С. Дорошевич
5. Pavlyuchenko V.V., Doroshevich E.S. Using Film Flux Detectors to Determine Properties of Conducting
and Magnetic Objects // Russian Journal of Nondestructive Testing. 2018. V. 54. No. 1. P. 70—76. [Павлючен-
ко В.В., Дорошевич Е.С. Применение пленочных флюкс-детекторов для определения свойств электро-
проводящих и магнитных объектов // Дефектоскопия. 2018. № 1. С. 52—57.]
6. Суханов Д.Я., Завьялова К.В. Представление поля электропроводящего объекта в виде суперпо-
зиции полей элементарных вихревых токов и их томография // Изв. ВУЗов. 2017. Т. 60. № 11. С. 28—34.
7. Atavin V.G., Uzkikh A.A., Iskhuzhin R.R. Tuning Out from Base Electric Conductivity in Conductive-
Coating Thickness Gauging // Russian Journal of Nondestructive Testing. 2018. V. 54. No. 1. P. 77—83.
[Атавин В.Г., Узких А.А., Исхужин Р.Р. Отстройка от электропроводности основания при измерении
толщины токопроводящих покрытий методом вихревых токов // Дефектоскопия. 2018. № 1. С. 58—64.]
8. Zhdanov A.G., Shchukis E.G., Lunin V.P. et al. Algorithms for Pre-Processing of Eddy-Current Signals
when Inspecting Heat-Exchanger Pipes of NPP Steam Generators // Russian Journal of Nondestructive
Testing. 2018. V. 54. No. 4. P. 283—293. [Жданов А.Г., Щукис Е.Г., Лунин В.П., Столяров А.А. Алгоритмы
предварительной обработки вихретоковых сигналов при контроле теплообменных труб парогенерато-
ров АЭС // Дефектоскопия. 2018. № 4. С. 54—64.]
9. Kiselev E.K., Gol’dshtein A.E. Eddy-Current System for Testing Inner Diameter of Pipes // Russian
Journal of Nondestructive Testing. 2019. V. 55. No. 3. P. 210—216. [Киселев Е.К., Гольдштейн А.Е.
Вихретоковая система контроля внутреннего диаметра труб // Дефектоскопия. 2019. № 3. С. 25—30.]
10. Лухвич А.А., Булатов О.В., Лукьянов А.Л., Полякова М.Н., Мосякин В.В. Контроль магнитодина-
мическим методом толщины никелевых покрытий подхромовыми на двухслойных (неферромагне-
тик—ферромагнетик) основаниях // Дефектоскопия. 2015. № 1. С. 3—10.
11. Козлов В.С. Техника магнитографической дефектоскопии. Минск: Вышэйшая школа, 1976. 256с.
12. Грузинцев А.А., Михайлов С.П. Самосогласованный расчет магнитного поля для задач магнит-
ной дефектоскопии. Ι. Исходная модель для расчета поля магнитной ленты, намагниченной от прово-
дника с током // Дефектоскопия. 2011. № 2. С. 22—30.
Detectors // Russian Journal of Nondestructive Testing. 2019. V. 55. No. 1. P. 48—58. [
Павлюченко В.В.,
Дорошевич Е.С. Контроль дефектов сплошности в металлах с помощью пленочных флюкс-детекторов
// Дефектоскопия. 2019. № 1. С. 44—52.]
14. Pavlyuchenko V.V., Doroshevich E.S. Detecting Extended Complex-Shaped Defects in Electroconductive
Plates Using a Magnetic Carrier // Russian Journal of Nondestructive Testing. 2019. V. 55. No. 3. P. 217—224.
[Павлюченко В.В., Дорошевич Е.С. Обнаружение протяженных дефектов сложной формы в токопрово-
дящих пластинах с помощью магнитного носителя // Дефектоскопия. 2019. № 3. С. 48—56.]
Дефектоскопия
№ 1
2020