УДК 620.179.14
ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ ИЗМЕРЕНИЯ РАЗМЕРОВ ТРЕЩИН
СИЛИКАТНО-ЭМАЛЕВОГО ПОКРЫТИЯ ТРУБЫ
© 2020 г. Я.М. Гаджиев 1,*, Э.Н. Ибрагимова2,**
1Азербайджанский государственный университет нефти и промышленности,
Аз 5000, Сумгаит, ул. Азизбекова, 2-ой квартал, 2/33
2Азербайджанский государственный университет нефти и промышленности, Aз.1119, Баку, ул.
Нахичеванского, 20
E-mail: * yasharm@gmail.com;**elladai@inbox.ru
Поступила в редакцию 20.06.2019; после доработки 30.07.2019
Принята к публикации 16.08.2019
Проведено экспериментальное исследование нахождения геометрических форм и размеров макро- и микротрещин
на внутренней окружности силикатно-эмалевого покрытия трубы. Разработана схема программно-управляемой установ-
ки по измерению токов утечки через макро- и микротрещины в покрытии трубы. При помощи созданной дефектоскопи-
ческой установки проведено исследование распределения плотности дефектов трубы вдоль силикатно-эмалевого покры-
тия и построения графической зависимости параметров этих дефектов от координат их локализации. В теоретической
части была выведена зависимость токов утечки от длины и глубины залегания микротрещин вдоль силикатно-эмалевого
покрытия трубы. Установка позволяет получить наиболее полную картину о распределении плотности трещин вдоль
внутренней поверхности исследуемого объекта.
Ключевые слова: дефектоскопическая установка, схема управления, измерение токов утечки, геометрические раз-
меры трещин, электрическое сопротивление трещин.
DOI: 10.31857/S0130308220010078
ВВЕДЕНИЕ
Многолетние экспериментальные исследования показывают, что силикатно-эмалевые покры-
тия трубы в условиях повышенных температур эксплуатации, давлений и высокоминерализован-
ной среды можно успешно применять в нефтяной, химической, энергетической и др. отраслях
промышленности [1,2].
В процессе нанесения покрытия на внутреннюю поверхность трубы по различным причинам
возможны нарушения сплошности целостности слоя покрытий. Нарушение сплошности хотя бы в
одном месте приводит к выходу из строя всей системы трубопроводов, то есть способствуют дис-
кредитации идеи защиты труб от агрессивной среды с помощью силикатно-эмалевого покрытия
(ЭСП).
Причинами таких нарушений может быть как наличие дефекта в исходных материалах покры-
тий, так и появление трещин на поверхности силикатно-эмалевых покрытий трубы.
Следует отметить, что положительный опыт, накопленный в производстве нефтехимических
труб с ЭСП в различных регионах России и Каспийского моря, вызвал большой интерес как рос-
сийских, так и зарубежных специалистов к исследованиям процесса образования макро- и микро-
трещин на внутренней поверхности покрытий для различных размеров стандартных труб. Поэтому
нанесение ЭСП на внутреннюю поверхность трубы требует детального исследования причин
появления трещин и измерения размеров макро- и микротрещин в покрытиях вдоль всей поверх-
ности ЭСП труб, для процесса нанесения ЭСП на внутреннюю поверхность трубы необходимо
тщательное изучение природы возникновения макро- и микротрещин покрытий, а также измере-
ние их размеров по всей внутренней поверхности стандартных труб с длинами 3—12 м [1, 2].
Более трудным, но важным практически является определение координат локализации и гео-
метрических размеров трещин в ЭСП труб.
В связи с этим разработана дефектоскопическая установка для исследования трещин на внутрен-
ней поверхности ЭСП трубы. Идея основана на измерении параметров коронного электрического раз-
ряда (КЭР) вдоль внутренней поверхности трубы, покрытой силикатно-эмалевым защитным слоем.
МЕТОДИКА ПРОВЕДЕНИЯ ИССЛЕДОВАНИЯ
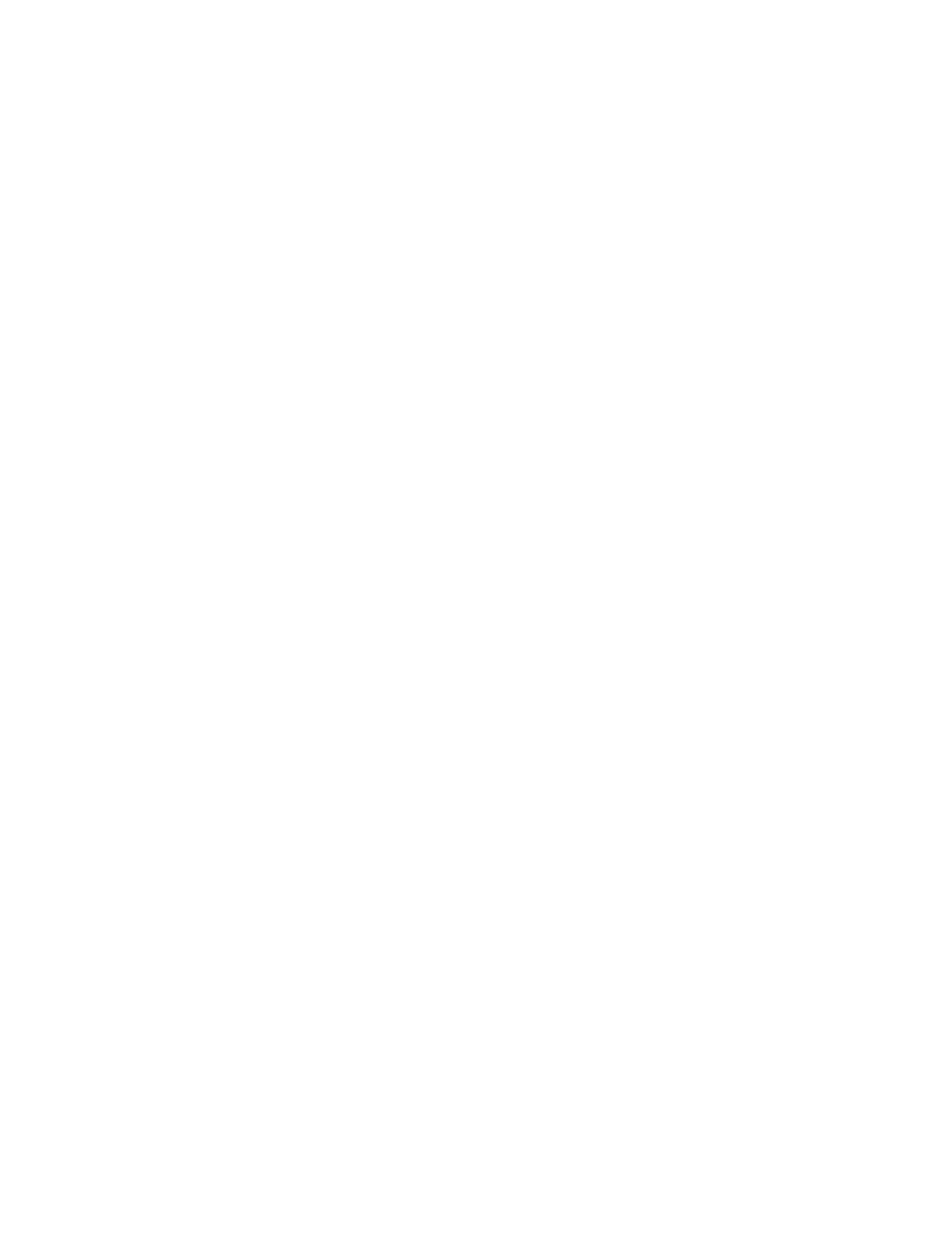
Технологическая схема экспериментальной измерительной установки приведена на рис. 1, в
которой отражены основные узлы и ключевые компоненты установки. Функции и предназначения
62
Я.М. Гаджиев, Э.Н. Ибрагимова
1
2
3
4
5
6
8
9
10
11
7
12
14
15
М
МК
ДН
13
«Arduino»
FC-03
17
Рис. 1. Технологическая схема экспериментальной измерительной установки:
1 — регулируемый высоковольтный ВТ-1; 2 — кабели подачи высоковольтного испытательного напряжения; 3 — регулятор
высоковольтного напряжения; 4 — соединительный высоковольтный кабель; 5 — тестирующий зонд типа “ерш”; 6 — исследуемая
труба с внутренним силикатным покрытием; 7 — преобразовательный трансформатор для регистрации утечки и преобразования их в
измеряемое напряжение; 8 — шнур тянущий тестирующий зонд типа “ерш”; 9 — вращающий барабан; 10 — потенциометрический
измеритель вращения; 11 — регулятор вращения мотора; 12 — электромотор 12-АО-2; 13 — двигатель-измеритель частоты вращения
мотора; 14 — датчик напряжения; 15 — микроконтроллер «Arduino»; 17 — компьютер, управляющий режимами эксперимента.
этих узлов являются принципиально достаточными для воссоздания полной картины процесса
проведения экспериментов по исследованию токов утечки через внутреннее силикатно-эмалевое
покрытие трубы.
Объектом исследования является промышленная труба (6) с нанесенным внутренним слоем
ЭСП. Испытательное напряжение (≤ 40 кВ) подается на “ерш”-образный (5) испытательный зонд,
который при помощи прикрепленного тянущего шнура (8) перемещается вдоль внутренней
поверхности трубы и тем самым последовательно сканирует изнутри трубу высоким напряже-
нием (4).
Токи утечки снимаются измерительным трансформатором (7) и преобразуются в напряжение,
измеряемое при помощи контроллера «Аrduino» (15).
Контроллер (15) также принимает и обрабатывает сигналы, соответствующие координате
нахождения зонда (5) в трубе (6).
Как видно из рисунка, схема управления и измерения дефектоскопической установки функци-
онально состоит из трех частей, разработанных для выполнения следующих операций при про-
ведении экспериментов по определению локализации трещин во внутренних силикатно-эмалевых
покрытиях металлических труб:
а) измерение токов утечки от «ерша» (6) через трещины в силикатно-эмалевом покрытии и
далее через измерительный трансформатор (1) и датчик (14) для измерения напряжения;
б) измерение длины части шнура с «ершом» (8), находящимся внутри испытательной трубы,
для определения координаты положения «ерша» в трубе;
в) измерение скорости вращения асинхронного двигателя (12) и сравнение его с заданной вели-
чиной;
г) управление скоростью перемещения «ерша» за счет замедления или же ускорения скорости
вращения асинхронного двигателя, тянущего шнур, который прикреплен к «ершу» через барабан (9).
Измерительные функции управления на установке дефектоскопа реализуются на базе микро-
контроллера «Arduino» (15) со специальным программным обеспечением, разработанным для
вышеуказанных конкретных измерений и функций управления. Функции управления и измерения
выполнены в следующем порядке.
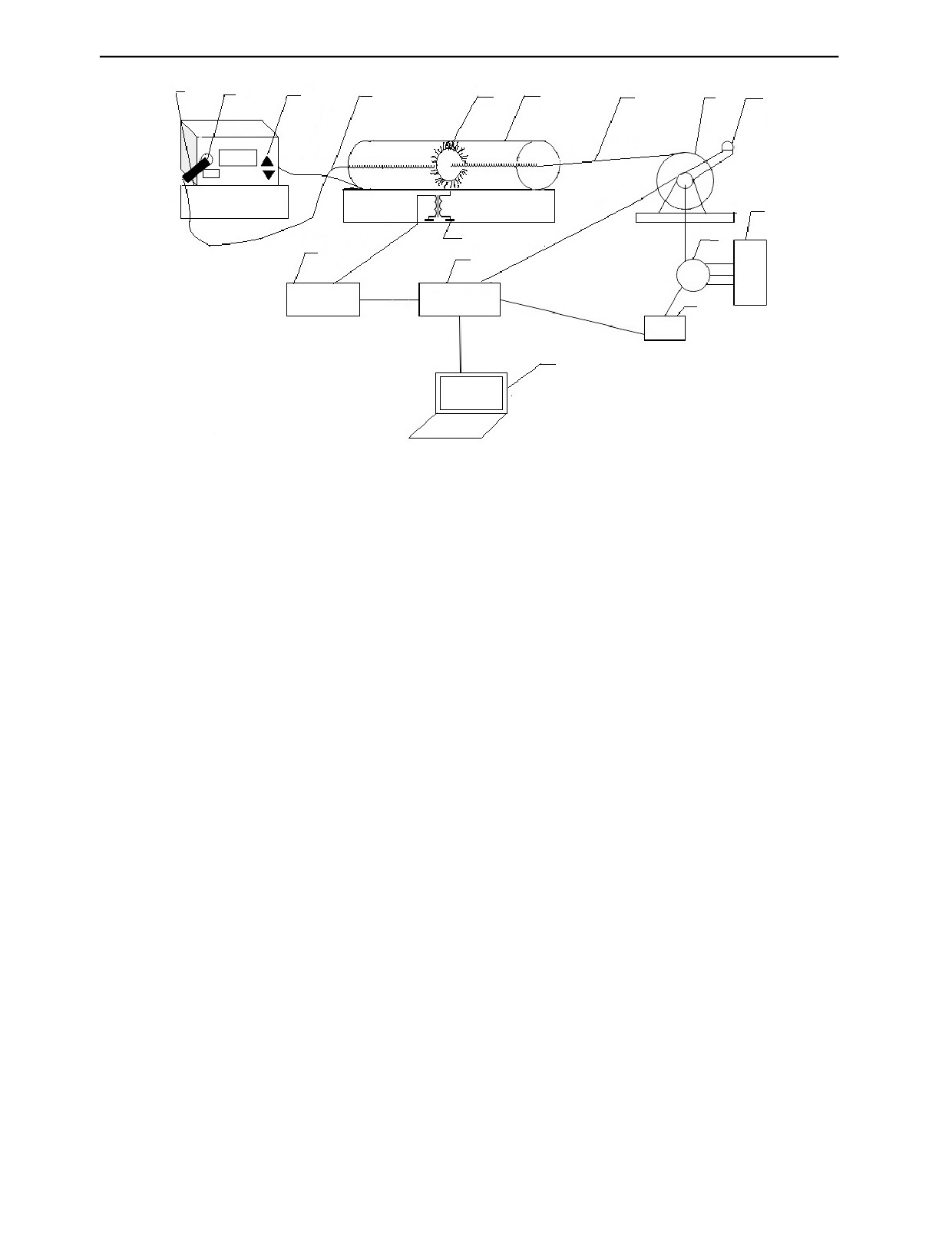
Измерение токов утечки через силикатно-эмалевое покрытие (рис. 2 а), представлена принципи-
альная электрическая схема измерительной части дефектоскопической установки для определения
геометрических размеров трещин в покрытиях труб и для исследования природы их образования.
Дефектоскопия
№ 1
2020
Экспериментальное исследование измерения размеров трещин...
63
а
ДН
ИТ
б
ПДШ
г
в
КМП
ТТР
ТОП
Рис. 2. Принципиальная схема управления и измерения на дефектоскопической установке, созданной на основе
микроконтроллера «Arduino»:
а — измерение токов утечки через силикатно-эмалевое покрытие; б — определение текущей координаты локализации «ерша» в трубе;
в — измерение скорости вращения асинхронного двигателя; г — управление (подключением/отключением трехфазным двигателем)
напряжением, подаваемым на все три обмотки статора двигателя; ПДШ — потенциометр; ДН — датчик напряжения; ИТ —
измерительный трансформатор; ТТР — транзисторная оптопара; КМП — компаратор.
Как видно из измерительной схемы, приведенной на риc. 2 (а — выделено штриховой линией),
токи утечки от «ерша», проникающие через трещины в силикатно-эмалевом покрытии, проходят через
первичную обмотку трансформатора (ИТ), со вторичной обмотки которого трансформированное
напряжение подается на диодный выпрямитель и далее поступает на датчик напряжения (ДН) [3, 6].
Датчик напряжения (ДН) является масштабируемым согласователем измеряемого тока утечки
с разрешаемой величиной входного напряжения микроконтроллера «Arduino».
Сигнал с датчика напряжения (ДН) подается на Ao и GND-аналоговые входы «Arduino».
Последний с помощью разработанной программы калибрует и вычисляет параметры тока
утечки и заносит текущие значения в память «Arduino», а также дублирует эти данные в PC.
Определение текущей координаты локализации «ерша» в трубе (см. рис. 2б) происходит за счет
измерения величины сопротивления потенциометра (ПДШ), бегунок которого механически соеди-
нен с вращающимся блоком (барабаном). Шнур, к которому подсоединен «ерш», через блок при-
вязывается к ротору двигателя, который вытягивает шнур из измеряемой трубы. Таким образом,
измеряемое сопротивление потенциометра будет линейно пропорционально длине части шнура с
«ершом», находящимся в внутри испытательные трубы. Это помогает привязать измеряемые дан-
ные по токам утечки к текущим координатам положения ерша в трубе. С выходов VCC и GND
калиброванное напряжение +5 В подается на потенциометр ПДШ, а напряжение с его бегунка
подключается к аналоговому входу (А1) «Arduino». Программным путем выстраивается зависи-
мость между величиной выходного сопротивления ПДШ от координаты «ерша» в трубе.
Далее эти данные были использованы для построения искомой зависимости тока утечки от
положения «ерша» в трубе [4, 5].
Измерение скорости вращения асинхронного двигателя (см. рис. 2 в) производится при помощи
транзисторной оптопары (ТОП) (DA2), закрепленной перпендикулярно ротору электродвигателя и
считывающей число его вращений. Сигналы с ТОП поступают на инверсный (-) вход компаратора
(КМП), собранного на основе операционного усилителя. На другой вход компаратора подается
опорное напряжение с аналогового выхода (А2) «Arduino». Опорное напряжение определяется про-
граммном путем от «Arduino» и тем самым задает величину напряжения соответствующего желае-
мой скорости вращения двигателя. Итоговый сигнал корпорации с КМП подается на аналоговый
вход (А3) «Arduino» и после программной обработки поступает на аналоговый выход (А4) [3, 6].
Дефектоскопия
№ 1
2020
64
Я.М. Гаджиев, Э.Н. Ибрагимова
Далее этот сигнал поступает в схему управления вращением асинхронного электродвигателя.
В представленной схеме трехфазный двигатель управляется подключением/отключением фаз-
ных (~380 В) напряжений, подаваемых на все три обмотки статора двигателя (см. рис. 2г). Подача
напряжений осуществляется через трехфазное реле (ТТР), управляемое сигналом, поступающим
от цифрового выхода (D2) через инвертор и NPN-транзистор.
Таким образом, сигнал отключения электродвигателя, поступающего от «Arduino» на реле,
происходит в двух случаях: если достигается желаемая скорость вращения двигателя или в случае,
когда «ерш» достигает конца исследуемой трубы [4, 6].
Сигналы с «Arduino» путем включения/отключения добиваются замедления или же ускорения
скорости вращения асинхронного двигателя, тянущего через барабан шнур, который прикреплен
к «ершу».
РЕЗУЛЬТАТЫ ЭКСПЕРИМЕНТАЛЬНОГО ИССЛЕДОВАНИЯ И ИХ ОБСУЖДЕНИЕ
Электроискровой дефектоскоп данной установки позволяет произвести измерения электриче-
ского сопротивления трещин покрытия, выявляемых при прохождении зонда с высоковольтным
напряжением вдоль внутренней поверхности трубы. Эти измерения определяют геометрические
размеры обнаруженных трещин на внутренней поверхности трубы согласно известной формуле
[1, 2] в следующей последовательности. Зная значение электрического сопротивления трещин, по
этой формуле можно вычислить геометрические размеры трещин:
l
r=ρ
,
(1)
S
где r — электрическое сопротивление в зоне трещины, определяемое по экспериментальным изме-
рениям; ρ — удельное сопротивление трещин покрытия трубы, принимается по максимальному
значению ρ =10 Ом∙мм [2]; l — длина трещин вдоль внутренней окружности покрытия трубы;
S — площадь поперечного сечения трещин, которая вычисляется следующим образом:
S = bδ,
(2)
где b — ширина трещин, максимальное значение которого b = 1,0 мм [1, 2]; δ — толщина покрытия
трубы.
По известному закону Ома с учетом толщины покрытия имеем
Uδ
I
=
(3)
r
Для нашего случая U принимает значение U = 40 KB.
Подставляя выражение r из формулы (1) с учетом (3) окончательно имеем
2
δ
I
=
40
(4)
l
ρ
Таким образом, формула (4) позволяет определить значения сила тока (I) от значения толщины
покрытия (δ) и длины (l) трещин в покрытии трубы.
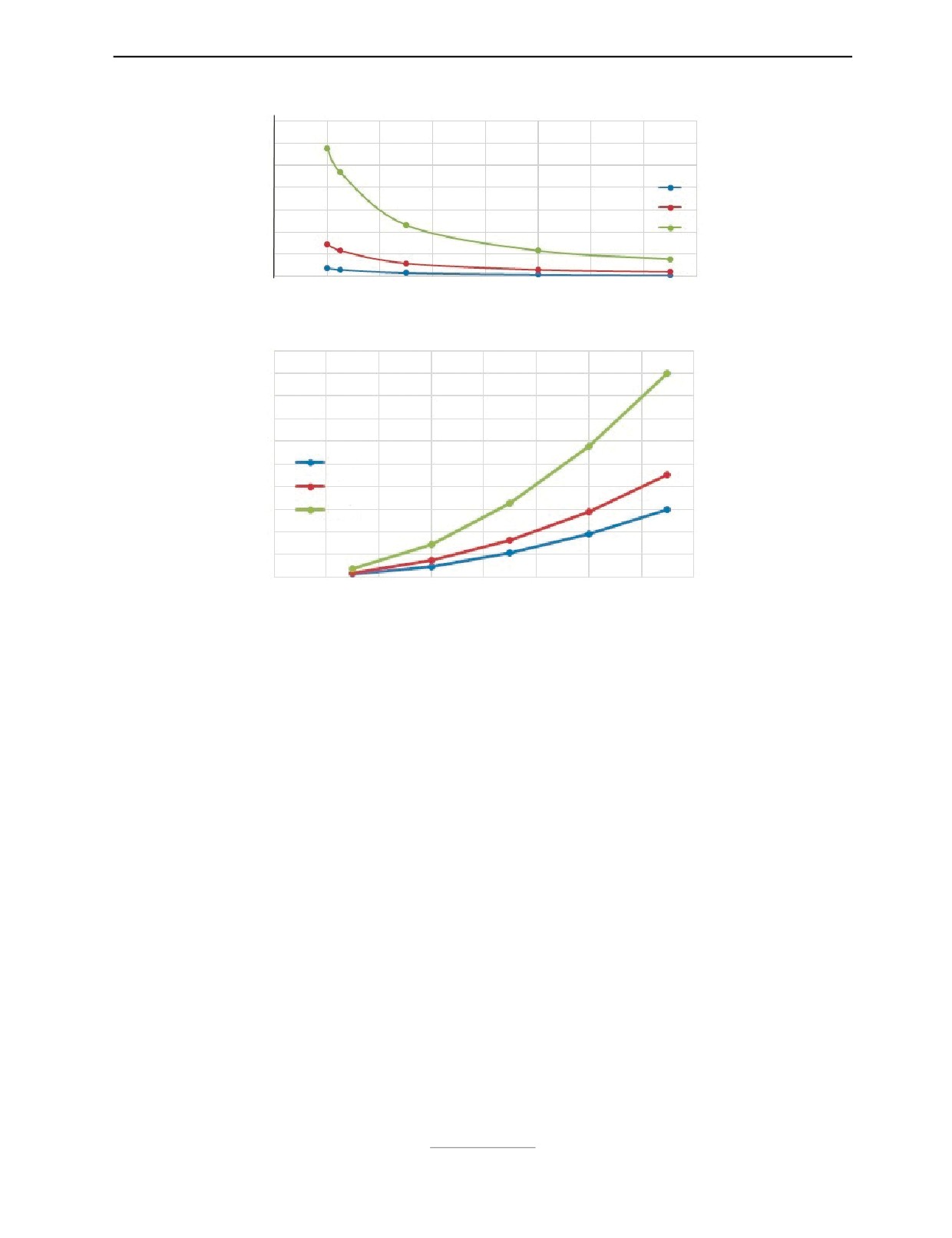
На рис. 3а приведены результаты экспериментальных исследований зависимости силы тока
утечки (I) через трещину от значений толщины покрытия (δ) и длины (l) трещин при средних пока-
заниях измерителей дефектоскопический установки. Экспериментальные исследования показыва-
ют, что при средних значениях толщины покрытия δ1 = 0,3 мм, δ2 = 0,6 мм, δ3 = 1,2 мм, плавно
уменьшается зависимость силы тока от длины трещин (l). Для δ1 = 1,2 мм наблюдается резкое его
уменьшение с увеличением длины трещин (l) вплоть до максимального значения l = 1,5 мм. Для
толщин покрытия δ2 = 0,3 мм, δ3 = 0,6 мм с увеличением длины трещин (l) сила тока слабо меня-
ется согласно показаниям прибора дефектоскопической установки.
На рис. 3б при значениях средних длин трещин l1 = 0,5 мм, l2 = 1,0 мм, l3 = 1,5 мм с увеличе-
нием толщины покрытия трубы резко изменяется значение силы тока утечки, эти изменения свя-
заны с усилением адгезии между внутренними поверхностями металла и силикатно-эмалевым
покрытием стандартной трубы [2, 3].
Таким образом, экспериментально выявленные графические зависимости параметров покры-
тия позволяют определить геометрических размеры трещин покрытия в широком наборе любых
диаметров и длин стандартных труб.
Дефектоскопия
№ 1
2020
Экспериментальное исследование измерения размеров трещин...
65
а
I, мА
35
30
25
20
δ = 0,3
15
δ = 0,6
δ = 1,2
10
5
L, мм
0 0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
б
I, мА
20
18
16
14
12
10
l = 1,5
8
l = 1,0
6
l = 0,5
4
2
0
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
δ, мм
Рис. 3. График экспериментальной зависимости токов утечки:
а — график экспериментальной зависимости токов утечки от толщины покрытий; б — график экспериментальной зависимости токов
утечки от длины трещин.
ВЫВОДЫ
1. Проведено исследование распределения микротрещин на внутренней поверхности силикат-
но-эмалевого покрытия для промышленных размеров стандартных труб. При этом разработанная
дефектоскопическая установка позволяет определить значения координат обнаруженных различ-
ных трещин покрытия труб.
2. Представлена схема дефектоскопической установки управления для проведения измерения
силы токов утечки через трещины в силикатно-эмалевом покрытии труб. Приведены результаты
экспериментальных исследований графической зависимости силы токов утечки через трещины
для различных толщин покрытия и длин образованных трещин.
СПИСОК ЛИТЕРАТУРЫ
1. Ibragimov N.Yu., Ibragimova E.N. Apparatus for identifying microcracks on the inner surface of glazed
pipes // Glass and Ceramics. 2018. V. 75. P. 272—274.
2. Ibragimov N.Yu., Ibragimova E.N. Investigation of Geometric Parameters of Cracks in Silicate Enamel
3. Simon M. Programming Arduino: Getting Started with Sketches, second edition. United States:
Copyright Mc-Grow Hill Education, 2016. 174 p.
4. Ибрагимов Н.Ю., Ибрагимова Э.Н. Дефектоскопическая установка трещиномер силикатных
покрытий труб // Дефектоскопия. 2017. № 11. C. 55—57.
5. Haciyev Y. Digital modulator for fiber-optical network // Application of information and communication
technologies-AICT. 2015. V. 1. P. 214—219.
6. Haciyev Y. Programmable laser light modulators for lidar systems // Application of information and
communication technologies-AICT. 2017. V. 1. P. 386—391.
Дефектоскопия
№ 1
2020