УДК 620.179.16
ПРИМЕНЕНИЕ ПЛЕНОЧНЫХ ПЬЕЗОПРЕОБРАЗОВАТЕЛЕЙ ДЛЯ
ВОЗБУЖДЕНИЯ И РЕГИСТРАЦИИ БЕГУЩИХ УПРУГИХ ВОЛН В СИСТЕМАХ
АКТИВНОГО МОНИТОРИНГА ПРОТЯЖЕННЫХ КОНСТРУКЦИЙ
© 2020 г. А.А. Еремин1,*, Е.В. Глушков1,**, Н.В. Глушкова1,***
1Институт математики механики и информатики, Кубанский государственный университет, Россия
350040 Краснодар, ул. Ставропольская, 149
E-mail: *eremin_a_87@mail.ru; **evg@math.kubsu.ru; ***nvg@math.kubsu.ru
Поступила в редакцию 10.08.2020; после доработки 10.08.2020
Принята к публикации 31.08.2020
В настоящее время активно развиваются технологии непрерывного ультразвукового мониторинга состояния про-
тяженных конструкций с помощью бегущих упругих волн, возбуждаемых и регистрируемых сетью пленочных пьезо-
элементов. Бегущие волны взаимодействуют с неоднородностями (дефектами) любой природы, выявляя их наличие,
возникающими при дифракции отраженными и рассеянными волнами, а изменение их характеристик указывает на
деградацию прочностных свойств материала в процессе эксплуатации. На основе измерений, проведенных на лабо-
раторных образцах, демонстрируются возможности пленочных пьезоэлементов генерировать зондирующие сигналы
различного вида, а также варьировать их амплитудно-частотными характеристиками в широком частотном диапазоне.
Математическое моделирование волновых процессов проводится в рамках интегрального подхода, базирующегося на
явном интегральном и асимптотическом представлении возбуждаемых волн через фурье-символ матрицы Грина рас-
сматриваемой волноводной структуры. Приводятся данные экспериментальных измерений, подтверждающие при-
менимость разработанной на этой основе упрощенной модели в двухмодовом диапазоне возбуждения фундаменталь-
ных волн Лэмба.
Ключевые слова: пьезоактуаторы, пьезосенсоры, волны Лэмба, матрица Грина.
DOI: 10.31857/S0130308220100036
ВВЕДЕНИЕ
Многие элементы инженерных сооружений, требующих повышенного контроля состояния в
процессе эксплуатации (аэрокосмические изделия, объекты атомной и химической промышлен-
ности, трубопроводы, емкости для хранения агрессивных веществ и др.), представляют собой
протяженные тонкостенные конструкции. Наряду с традиционными методами ультразвукового
(УЗ) неразрушающего контроля (НК) с помощью контактных [1] и бесконтактных (air-coupled) [2]
УЗ преобразователей, перемещаемых вдоль поверхности, непрерывный мониторинг состояния
таких конструкций может осуществляться с помощью бегущих упругих волн, возбуждаемых и
регистрируемых сетью пленочных пьезоэлементов, которые встраиваются в конструкцию или
размещаются на ее поверхности еще на этапе проектирования. Активные элементы сети (пьезо-
актуаторы) возбуждают бегущие волны (поверхностные акустические волны релеевского типа
(ПАВ), антисимметричные и симметричные волны Лэмба, горизонтально-поляризованные
SH-волны (волны Лява), интерфейсные волны Стоунли и др.). Они распространяются на сравни-
тельно большие расстояния и взаимодействуют с неоднородностями (дефектами) любой приро-
ды, выявляя их наличие возникающими при дифракции отраженными и рассеянными волнами,
которые регистрируются элементами сети. Их характеристики (частотный спектр, диаграммы
рассеяния, резонансные частоты рассеяния и др.) зависят от местоположения, вида, размера и
формы дефекта, т.е. несут информацию, необходимую для его обнаружения, локализации и оцен-
ки потенциальной угрозы. В отличие от традиционных методов НК (NDT — non-destructive
testing), мониторинг бегущими волнами можно вести непрерывно без прекращения или ограни-
чения эксплуатации инспектируемого объекта.
Данные соображения легли в основу подхода, получившего в зарубежной литературе название
guided wave Structural Health Monitoring (SHM) или активный мониторинг состояния конструкции
бегущими волнами [3—5]. Теоретические и экспериментальные основы использования волн
Лэмба для диагностики тонкостенных конструкций были заложены в 1960-е годы И.А. Викторовым,
монография которого [6] стала одной из отправных точек развития SHM-технологий. Однако
активные исследования и создание первых прототипов SHM-систем начались только в 1990-е
годы, когда сложились необходимые технические условия: появление легких пленочных пьезоэле-
ментов и микрокомпьютерных систем быстрой обработки данных.
Применение пленочных пьезопреобразователей для возбуждения и регистрации...
25
Кроме того, в 1970—80-е годы активно развивались методы ультразвуковой акустической
эмиссии (АЭ), основанные на регистрации событий АЭ, сопровождающих возникновение и рост
трещин, распределенной сетью пассивных датчиков. В этом плане АЭ-методики, позволяющие
непрерывно «слушать» конструкцию и локализовать места возникновения скрытых дефектов по
времени прихода АЭ-сигнала к различным элементам сети, близки к методам волнового монито-
ринга с помощью SHM-систем. Главное отличие состоит в том, что SHM-технологии базируются
не на пассивном прослушивании, а на активном мониторинге бегущими волнами.
Задачи регистрации рассеянных дефектами волн и обработки принятых сигналов примерно
те же, что и в системах регистрации событий АЭ, но информация, полученная с помощью SHM-
технологий, намного богаче, чем получаемая АЭ системами, Преимущество обеспечивается
использованием пленочных пьезоэлементов, работающих в значительно более широком частот-
ном диапазоне, чем традиционные узкополосные УЗ зонды, а также возможностью регулярного
повторения зондирующих посылок (непрерывный мониторинг) с варьированием их частотными
спектрами. При этом распространение бегущих волн на значительные расстояния позволяет
контролировать большие площади относительно редкой сетью пьезоэлементов сети.
Еще одно (не являющееся преимуществом) отличие использования бегущих волн состоит в
усложнении математического аппарата, требуемого для обработки полученных данных. В то
время, как используемые в NDT объемные упругие волны не обладают дисперсией и, поэтому,
их распространение, отражение и преломление хорошо описывается законами лучевой теории
[7], в том числе и в многослойных [8], и анизотропных [9] средах, дисперсия бегущих волн при-
водит к изменению формы зондирующего сигнала в процессе распространения, что не дает воз-
можности хорошо локализовать дефект по времени прихода рассеянных волн без учета зависи-
мости их скорости от частоты. Кроме того, просвечивание объемными волнами проводится на
сравнительно высоких частотах, на которых длина волны зондирующего сигнала меньше линей-
ных размеров искомого дефекта, что позволяет достаточно четко оконтуривать зону поврежде-
ния [10] или получать томографическое изображение внутренних объектов [11].
В SHM длина бегущих волн существенно больше толщины элементов тонкостенных кон-
струкций и, соответственно, скрытых в них повреждений. Поэтому для оценки размера дефекта,
восстановления его формы и определения типа (трещина, полость, включение) требуется обра-
ботка принятых сигналов в рамках математических моделей, адекватно описывающих процессы
возбуждения, распространения и дифракции бегущих волн в рассматриваемой слоистой струк-
туре [12]. Для этой цели используются как аналитические методы (построение дисперсионных
зависимостей и собственных форм нормальных мод, в том числе и для многослойных волново-
дов с анизотропией упругих свойств, наличием микроструктуры и т.п. [13,14]), так и численные
методы, базирующиеся на сеточной аппроксимации, такие как метод конечных элементов
(МКЭ). Последний используется для моделирования процесса возбуждения бегущих волн пле-
ночным пьезоактуатором [15] и решения задач дифракции на препятствиях произвольной формы
[16,17], однако анализ распространения волн в протяженных структурах с помощью МКЭ тре-
бует сравнительно больших вычисленных затрат, объем которых резко возрастает с ростом
частоты. Но главное, МКЭ, как и другие сеточные методы, не дает физически наглядной волно-
вой структуры решения, требуя дополнительной обработки численных результатов для выделе-
ния отдельных мод и определения их характеристик.
Обе эти задачи — моделирование действия пленочного пьезоактуатора и представление воз-
буждаемого волнового поля в виде суммы бегущих волн с амплитудными множителями, учиты-
вающими характеристики источника, решаются в рамках интегрального подхода, базирующего-
ся на представлении решения в виде контурного интеграла от произведения фурье-символов
матрицы Грина рассматриваемой волноводной структуры и поверхностной нагрузки (контакт-
ных напряжений), моделирующей действие пьезоактуатора. Применение теории вычетов к этим
интегралам дает представление в виде суммы бегущих волн с амплитудными множителями,
однозначно определяемыми характеристиками волновода и источника.
Данный подход развивался в южно-российской школе волновой динамики Воровича—
Бабешко [18, 19], в первую очередь, в приложении к задачам вибросейсморазведки и проектиро-
вания акустоэлектронных устройств на поверхностных волнах. Его потенциал был продемон-
стрирован и в ходе международного научного сотрудничества с группами, разрабатывающими и
внедряющими SHM-технологии, которое было начато еще в 1990-е годы и особенно плодотвор-
но развивалось в 2010-х годах [20—23]. Учитывая, что в отечественной литературе публикации
по проблематике активного SHM на основе бегущих волн все еще сравнительно редки [24, 25],
цель настоящей статьи — показать возможности пленочных пьезоэлементов и разрабатываемых
Дефектоскопия
№ 10
2020
26
А.А. Еремин, Е.В. Глушков, Н.В. Глушкова
полуаналитических моделей на примере результатов, полученных в лаборатории волновой диа-
гностики Института математики, механики и информатики КубГУ.
ПЛЕНОЧНЫЕ ПЬЕЗОЭЛЕМЕНТЫ КАК АКТИВНЫЕ ПРЕОБРАЗОВАТЕЛИ И СЕНСОРЫ
Наиболее часто в SHM-приложениях используются пленочные пьезокерамические элементы
круговой или прямоугольной формы толщиной от 0,2 до 1,0 мм, изготовленные на основе цирко-
ната-титаната свинца (PZT) и его модификаций [4] (рис. 1а). Для этого материала характерны
сильные пьезоэлектрические свойства и высокое значение диэлектрической проницаемости. Для
приложений, в которых хрупкость пьезокерамических преобразователей является критическим
недостатком, например, при установке пьезоэлемента на криволинейную поверхность или встра-
ивании его между слоями композитного материала, разрабатываются гибкие пьезокомпозитные
преобразователи: SMART Layer (Acellent Technologies Inc., США), DuraAct (PI Ceramic GmbH,
Германия) (рис. 1б). Также развиваются технологии напыления или печати пленочных преобразо-
вателей специальными пьезочернилами непосредственно на контролируемую конструкцию (мате-
риал PiezoPaint, Meggitt Sensing Systems, Дания).
а
б
Рис. 1. Круговые и прямоугольные пленочные пьезокерамические элементы (PZT) (а); пьезоэлементы из гибкого
материала DuraAct (б).
Для проведения экспериментов по возбуждению и измерению бегущих упругих волн c помо-
щью пленочных пьезокерамических элементов достаточно сравнительно скромного набора обо-
рудования. Во-первых, требуется генератор сигналов произвольной формы — управляющих посы-
лок v0(t) (Tektronix AFG 3021B) и цифровой запоминающий осциллограф (Tektronix TDS2014C или
USB-устройство АКИП-75442В); здесь и далее в скобках указаны приборы, использованные для
получения приведенных ниже результатов. В качестве дополнительных устройств, позволяющих
улучшить соотношение сигнал/шум и, тем самым, обеспечить покрытие бóльших площадей раз-
реженной сетью сенсоров, можно использовать высокочастотные амплитудные предусилители
(Актаком AVA-1745), которые подключаются между генератором сигналов и пленочным пьезоэле-
ментом, или постусилители напряжения, аналогичные тем, что используются в акустоэмиссион-
ных системах (ГлобалТест GT200A).
В данной статье экспериментальные и теоретические результаты приводятся для образца из
алюминия (пластина 600×600×2 мм3, модуль Юнга E = 70 ГПа, коэффициент Пуассона υ = 0,33,
плотность ρ = 2700 кг/м3), к поверхности которого приклеены 5 тонких вертикально поляризован-
ных пьезопреобразователей круговой формы (PiCeramics GmbH, Германия; пьезокерамика PIC151,
радиус a = 8 мм, толщина d = 0,25 мм) (рис. 2). Конструктивной особенностью этих преобразова-
телей является форма электродов: электрод с нижней поверхности частично выведен наверх, что
позволяет припаивать оба проводника (сигнальный и экран-заземление) к дневной поверхности
пьезоэлемента (на рис. 1а такой тип элементов, использовавшихся в экспериментах, отмечен бук-
вой «P»). Пьезоэлементы P1-P4 расположены в вершинах квадрата 200×200 мм2, моделируя типич-
ный для SHM-мониторинга участок распределенной сети активных пьезосенсоров; пятый пьезоэ-
лемент P5 приклеен в центре квадрата. Для уменьшения отражения от краев пластины вдоль них
нанесен тонкий слой пластилина шириной около 40 мм.
Для идентификации геометрических параметров и типа дефектов, обнаруженных с помощью
бегущих волн, а также для определения эффективных упругих модулей материала, важно иметь
Дефектоскопия
№ 10
2020
Применение пленочных пьезопреобразователей для возбуждения и регистрации...
27
а
б
Рис. 2. Схематичное изображение экспериментального образца (а) и его фотография (б).
возможность генерировать и измерять волновые поля в достаточно широком диапазоне частот
(от нескольких десятков до нескольких сотен килогерц для элементов тонкостенных конструкций
различной толщины). Пленочные пьезоэлементы предназначены для работы в широком диапазоне
частот, позволяя, в зависимости от управляющих посылок, генерировать как узкополосные, так и
широкополосные волновые пакеты. В то же время как при использовании традиционных контакт-
ных УЗ преобразователей резонансного типа для этого потребовалось бы несколько устройств с
различными центральными частотами.
В качестве примера на рис. 3а в градиентной шкале показана амплитуда функции log |H(f, ζ)|,
∞ ∞
(ζx+2πft)
где
H(
f
,ζ)
w x,
t ei
dxdt
— результат применения частотно-волнового анализа к скоро-
= ∫∫
−∞ -∞
сти вертикальных смещений w(x,t) на поверхности образца при возбуждении волнового поля
пьезоэлементом P5; (f, ζ) — плоскость частоты f и волнового числа ζ. Измерение сигналов w(x, t)
проводилось сканирующим лазерным виброметром Polytec PSV-500 вдоль горизонтального отрез-
ка, идущего вправо от источника P5 (рис. 2); в рамках научного сотрудничества использовался
лазерный виброметр Института механики Университета им. Гельмута Шмидта, Гамбург, Германия
[22]. Для возбуждения колебаний на пьезоэлемент подавалась сверхширокополосная тональная
посылка v0(t) в форме прямоугольного импульса длительностью 0,2 мкс, усиленная до 100 В.
Локальные максимумы функции log |H(f, ζ)| (темные области на рис. 3а) указывают на диспер-
сионные кривые ζ = ζn(f ), описывающие зависимость волновых чисел возбуждаемых бегущих
волн от частоты. Для наглядности штриховыми линиями показаны дисперсионные кривые волн
а
б
в
ζ, рад/мм
w, мм/с
w, мм/с
1
2
4
0
0
-1
-2
3
0
0,2
t, мс
0
0,1
t, мс
г
д
1
1
2
1
0
0,5
1
1,5
2
0
0,25
0
0,5
1,5
f, МГц
f, МГц
f, МГц
Рис. 3. Примеры использования пьезоэлементов: определение дисперсионных характеристик волн Лэмба (а); сигналы,
возбуждаемые тональными посылками с центральной частотой fc = 100
и 800 кГц (б, в); амплитуды их частотных спек-
тров (г, д), штриховыми линиями показаны спектры исходных посылок.
Дефектоскопия
№ 10
2020
28
А.А. Еремин, Е.В. Глушков, Н.В. Глушкова
Лэмба (антисимметричные моды An и симметричные Sn, n = 0, 1, 2, …), рассчитанные с помощью
программного комплекса WAVES-L [26]. Данный пример показывает, что пленочный пьезоэлемент
позволяет генерировать бегущие волны как на низких частотах (темные области в левой части
графика, соответствующие фундаментальным модам A0 и S0), так и на высоких частотах, достига-
ющих 2 МГц (темные участки, соответствующие антисимметричной волне A1 и симметричным
модам S1 и S2).
Работу актуатора в узкополосном режиме иллюстрируют графики сигналов w(t), измеренных
на расстоянии 200 мм от пьезоэлемента P5 (рис. 3б, в) и амплитуд их частотных спектров |W(f)|,
нормированных к максимальному значению (рис. 3г, д, сплошные линии). В обоих случаях пле-
ночный пьезоэлемент приводился в действие тональными посылками амплитудой 100 В в
форме двух циклов синуса, модулированных синус-окном с центральной частотой fc = 100 кГц
(рис. 3б, г) и 800 кГц (рис. 3в, д):
0
v t)= sin(2πf
c
t) sin(πf
c
t
/ 2), 0 <t<
2T,
T =1/
f
c
(1)
Штриховыми линиями на графиках (г) и (д) показаны амплитуды спектров исходных тональ-
ных посылок |V0(f)|.
В случае низкочастотной посылки (fc = 100 кГц) на графике принятого сигнала несложно выде-
лить волновые пакеты, соответствующие фундаментальным модам A0 и S0, а также пакет волн,
отраженных от границы образца, с максимумом амплитуды при t = 0,2 мс (см. рис. 3б). В случае
второй центральной частоты (fc = 800 кГц) спектр входного сигнала захватывает частотный диа-
пазон правее точек отсечки высших мод A1, S1 и S2, которые возбуждаются наряду с A0 и S0. Для
соотнесения отдельных участков волнового пакета той или иной моде проводится частотно-вре-
менной анализ регистрируемых сигналов, например, с использованием непрерывного вейвлет-
преобразования [27, 28]:
∞
1
*
τ-
t
W t,
f
)
=
w(τ)ψ
d
τ,
(2)
∫
T
T -∞
где ψ(t) — ядро вейвлет-преобразования, локализованное в окрестности нуля, T = 1/f — период
колебаний, звездочкой обозначено комплексное сопряжение.
f, МГц
а
f, МГц
б
0,15
1,5
0,1
1
0,8
0,05
0,5
0
0,1
0,2
0,3
0
0,1
0,2
t, мс
t, мс
Рис. 4. Скалограммы сигналов, показанных на рис. 3б, в (графики а и б соответственно).
На рис. 4 приводится пример нормированных поверхностей |W(t, f)| (скалограмм сигналов
w(t)), полученных в результате применения преобразования
(2) с ядром Габора
2
1
f
(
f
λ)
0
0
2
ψ(t)
=
exp
−
t
+if
t
к сигналам, приведенным на рис. 3б, в (f0 = 1 кГц, λ = π 2 ln 2,
4
0
π
λ
2
время t задается в миллисекундах). Сплошными и штриховыми линиями на них нанесены теоре-
тические частотные зависимости времени задержки tgr(f ) для антисимметричных и симметричных
волн Лэмба, которые показывают ожидаемое время прихода соответствующих частотных компо-
нент волнового пакета в точку регистрации. Время задержки обратно пропорционально групповой
r
скорости:
t
(
f
)
=
+
T
+
T
, где r = 200 мм — расстояние от центра актуатора P5 до точки
gr
sig
trig
c
(
f
)
gr
измерения сигнала лазерным виброметром, cgr(f ) — частотная зависимость групповой скорости
Дефектоскопия
№ 10
2020
Применение пленочных пьезопреобразователей для возбуждения и регистрации...
29
1
соответствующей моды;
sig
T
=
— половина длительности тональной посылки v0(t) в форме (1),
f
c
Ttrig = 4·10-6 c — время задержки после получения триггер-сигнала блоком обработки сигналов
лазерного виброметра. Горизонтальной штриховой линией показано значение центральной часто-
ты управляющей посылки v0(t). Видно, что в двухмодовом частотном диапазоне локальные макси-
мумы |W(t, f)| (темные участки на поверхностях рис. 4) хорошо согласуются с соответствующими
теоретическими кривыми. В то же время, в окрестности частоты f = 1 МГц у возбуждаемых одно-
временно мод S0, A0 и A1 (см. темные области на рис. 3а) близки значения групповых скоростей: на
поверхности |W(t, f)| наблюдается типичная интерференционная картина (многочисленные темные
пятна) [28].
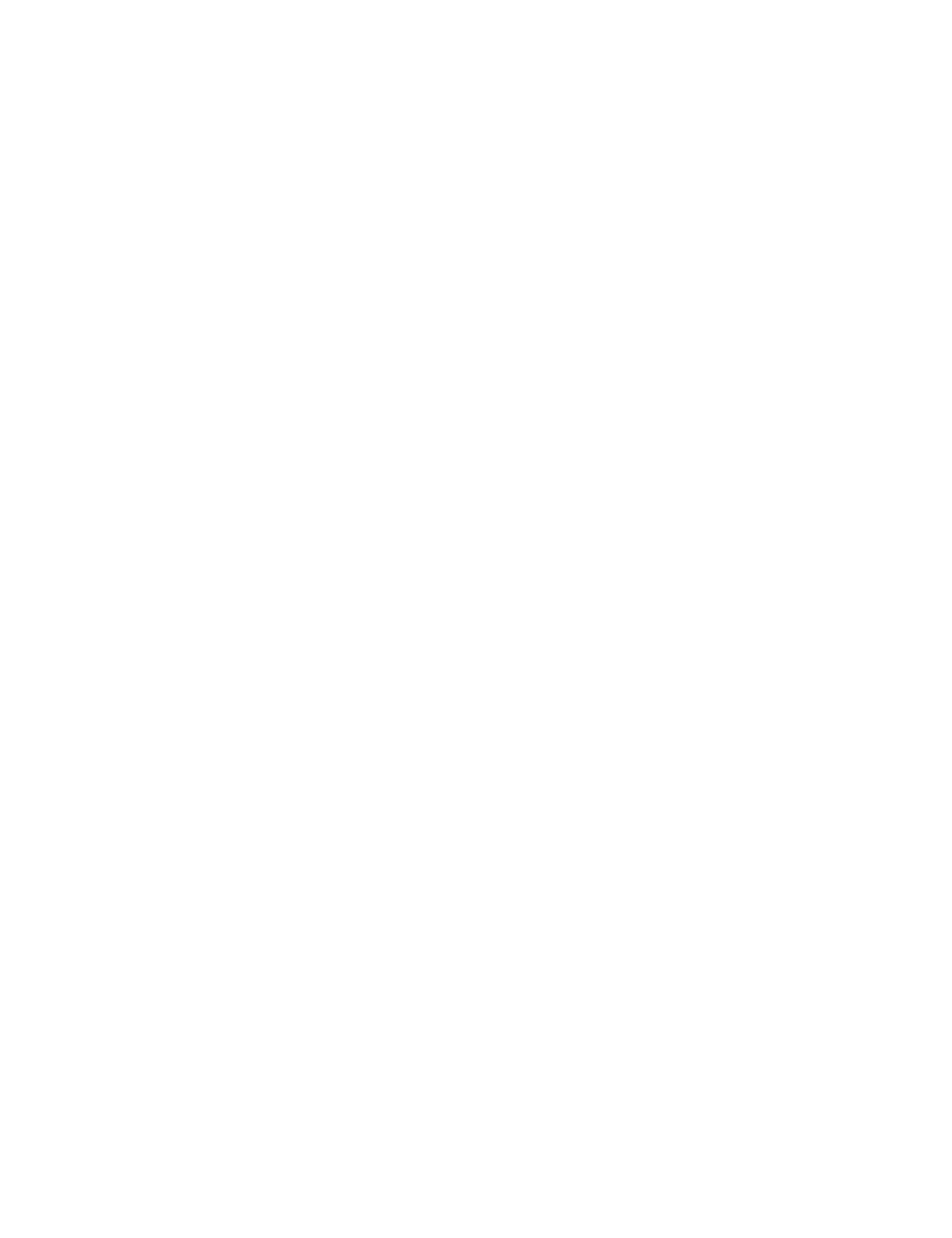
Для иллюстрации возможности использования пленочных пьезоэлементов в качестве сенсоров
на рис. 5 приводятся результаты измерения бегущих волн пьезоэлементом P1 при их возбуждении
элементом P4. Показаны принятые нестационарные сигналы v(t) (электрическое напряжение, воз-
никающее при деформации пьезопластины сенсора P1, верхний ряд графиков) и амплитуды их
частотных спектров |V( f)| (нижний ряд). На рис. 6 приводятся скалограммы этих сигналов.
v, мВ
а
v, мВ
б
v, мВ
в
50
100
50
0
0
0
-50
–100
-50
0
0,1
0,2
0
0,1
0,2
0
0,1
0,2
t, мс
t, мс
t, мс
г
д
е
0
0,5
1
0
0,25
0
0,5
1
f, МГц
f, МГц
f, МГц
Рис. 5. Примеры использования пленочного пьезоэлемента в качестве сенсора.
В первом случае (рис. 5а, г) на актуатор подавалась широкополосная прямоугольная импульс-
ная посылка длительностью 0,5 мкс и амплитудой 100 В. Во втором и третьем случаях исполь-
зовались узкополосные посылки в форме пяти циклов синуса, модулированных окном Ханна, с
теми же центральными частотами fc = 100кГц (рис. 5б, д) и 800 кГц (рис. 5в, е), что и в примерах
рис. 3:
1
v t)
=
sin(2πf
t)
[
1−cos(2πf
t
/ 5)
]
,0
<t< T,
T =1/
f
(3)
0
c
c
c
2
Амплитуды спектра исходных управляющих посылок показаны на рис. 5г—е штриховыми
линиями.
Хотя амплитуда спектра широкополосной посылки очерчивается плавной монотонно убываю-
щей кривой, в спектре принятого сигнала наблюдается типичное для размерных источников чере-
дование локальных максимумов и минимумов, связанное со сложением волн, приходящих от раз-
ных краев пьезоактуатора в фазе или противофазе (рис. 5г). Для оценки диапазона чувствитель-
ности пленочного пьезоэлемента, используемого в качестве сенсора, на этом же рисунке штрих-
пунктирной линией показан спектр вертикальной скорости смещений поверхности |W(f)|, измерен-
ной лазерным виброметром на таком же расстоянии 200 мм от преобразователя P5 при его воз-
буждении посылкой (3). Сопоставление частотных диапазонов этих спектров показывает, что
пленочный пьезосенсор менее чувствителен к высокочастотным компонентам волнового сигнала.
Тем не менее в диапазоне частот до 1,25 МГц рассматриваемые пьезопреобразователи вполне спо-
собны детектировать как низкочастотные, так и высокочастотные волновые поля на значительных
Дефектоскопия
№ 10
2020
30
А.А. Еремин, Е.В. Глушков, Н.В. Глушкова
f, МГц
а
f, МГц
б
f, МГц
в
0,15
1
1
0,8
0,1
0,5
0,5
0,05
0
0,1
0,2
0,3
0
0,1
0,2
0,3
0
0,1
0,2
t, мс
t, мс
t, мс
r
Рис.
6. Скалограммы сигналов, показанных на рис. 5а—в (графики а—в соответственно); здесь tgr
=
+
T
,
sig
5
c
gr
T
=
— половина длительности тональной посылки v0(t) в форме (3) (б, в).
Tsig = 0,25 · 10-6 с (а),
sig
2fc
расстояниях от источника колебаний. Этот вывод подтверждают результаты измерения бегущих
волн, генерируемых низкочастотной и высокочастотной узкополосной посылкой, приведенные на
рис. 5б, в.
Для оценки значения амплитудного предусилителя на рис. 5е штрихпунктирной линией пока-
зан частотный спектр сигнала, полученного сенсором P1 при подаче на актуатор посылки (3) с
исходным уровнем входных напряжений в диапазоне ±5 В. Здесь хоть и наблюдается ухудшение
соотношения «сигнал-шум», но порога чувствительности в 0,1 мВ у USB-осциллографа АКИП-
75442В достаточно, чтобы надежно детектировать соответствующие напряжения. Регистрируемые
сигналы вполне пригодны для анализа, и спектральные компоненты, соответствующие окрестно-
сти центральной частоты возбуждающей тональной посылки, почти не теряются.
Общий вид скалограмм (см. рис. 6) в целом аналогичен результатам, приведенным на рис. 4.
Из особенностей можно отметить выделение сигнала, соответствующего высшей моде A1 (темная
область на рис. 6а в окрестности частоты f = 1,2 МГц и времени t = 60 мкс).
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
Протяженный элемент конструкции (пластина толщины h) моделируется упругим слоем или
пакетом слоев (слоистый композит), занимающим в декартовой системе координат x = (x, y, z) =
= (x1, x2, x3) полубесконечный объем D : -∞ < x, y < ∞, - h ≤ z ≤ 0 . Координатная плоскость (x, y)
совпадает с дневной поверхностью слоя, начало координат находится в центре области Ω —
области контакта пьезоактуатора с поверхностью; ось z совпадает с внешней нормалью. Волно-
вое поле, возбуждаемое в слое пьезоактуатором, описывается вектором смещения u = (u1, u2, u3).
Верхняя и нижняя поверхности слоя z = 0 и z = -h свободны от напряжений τ = (τxz, τyz, σz) =
= (τ1, τ2, τ3) за исключением области Ω. При деформации пленочного пьезоэлемента под дей-
ствием управляющей электрической посылки v0(t) в этой области возникают контактные
напряжения
τ
=q(x,
y x,
y)∈Ω,
(4)
z=0
генерирующие волновое поле u(x,t), которое с помощью обратного преобразования Фурье по кру-
говой частоте ω = 2πf выражается через частотный спектр u(x, ω):
∞
1
−iùt
u x,t)
=
u x,ω)e
dω
(5)
∫
2π
-∞
В рамках интегрального подхода частотный спектр представляется в виде свертки матрицы
Грина рассматриваемой слоистой структуры k(x) с вектором поверхностной нагрузки q или, экви-
валентно, в виде контурного интеграла обратного преобразования Фурье от произведения их
Фурье символов K = Fxy[k] и Q = Fxy[q] [18,19,30,31]:
−1
1
−i(α
1
x+α
2
y)
u x,ω)
=
F
[K
⋅Q] =
K(α
,α
,z)Q(α
,α
)e
dα
dα
2
∫∫
1
2
1
2
1
2
(6)
(2π)
Γ
1
Γ
2
Дефектоскопия
№ 10
2020
Применение пленочных пьезопреобразователей для возбуждения и регистрации...
31
Здесь Fxy — оператор преобразования Фурье по горизонтальным координатам x, y; контуры инте-
грирования Γ1, Γ2 идут в комплексных плоскостях α1 и α2 вдоль вещественных осей, отклоняясь от
них при обходе вещественных полюсов ζn элементов матрицы K. Столбцами kj матрицы Грина
k = (k1 | k2 | k3) являются решения рассматриваемой краевой задачи для сосредоточенных поверх-
ностных нагрузок, приложенных вдоль осей координат:
τ
=i
δ(x,
y),
j=1,2,3, где ij — коорди-
z=0
j
натные орты, δ(x, y) — дельта-функция Дирака.
Алгоритмы построения матрицы K для слоистых волноводов различного вида (многослойные,
анизотропные, градиентные) приводятся в работах [29—32] и цитируемых в них статьях. Там же
выводятся асимптотики интегралов (6) в дальней зоне, которые дают явные аналитические пред-
ставления для бегущих волн, возбуждаемых нагрузкой q:
iζ
n
r
−3/2
u(r,ϕ,z)
=
∑
a
n
(ϕ,z)e
ζ
n
r +O((ζ
n
r)
),
ζ
n
r
→∞,
(7)
n
x= rcos
ϕ
α
=αcosγ
1
y = rsin
ϕ
α
=αsinγ
2
2
2
2
2
r
=
x
+
y
α= α
+α
,
0
≤ϕ,
γ< π
1
2
Для рассматриваемой алюминиевой пластины (изотропный случай) значения полюсов ζn не
зависят от угловой координаты γ, и амплитудные коэффициенты an могут быть представлены в
следующем виде:
i
a
=
res K(
−α ϕ,z)
Q
,
Q
=
Q(
−ζ ϕ).
(8)
n
α=ζ
n
n
n
n
2π
В анизотропном случае (композитные пластины, слоистые волоконно-армированные углепла-
стики и т.п.) полюса зависят от γ, что приводит к более сложному (но по-прежнему явному анали-
тическому) представлению коэффициентов an через вычеты подынтегральной функции в этих
полюсах [30,31].
Каждое из слагаемых ряда (7) описывает цилиндрическую волну, распространяющуюся от
источника с фазовой скоростью cn = ω/Reζn и, если полюс комплексный, с экспоненциальным зату-
|Imζ
n|
r
ханием
e-
. Полюса ζn, играющие в изотропном случае роль волновых чисел, определяются как
корни уравнения
∆ α
ω)
=
0⇒α=ζ
(ω),
(9)
n
где Δ — общий знаменатель элементов матрицы K. Уравнение (9) совпадает с характеристическим
(дисперсионным) уравнением, которое получается в рамках модального анализа при подстановке
αr
искомого собственного решения в форме с разделенными переменными
u=b ϕ
z ei
в уравнения
динамической теории упругости и однородные граничные условия для рассматриваемого волново-
да. Амплитудные коэффициенты an совпадают с точностью до постоянных множителей с модаль-
ными собственными формами bn, но в отличие от последних они определяются однозначно, учи-
тывая не только строение и свойства волновода (через матрицу K), но и характеристики источника
(через множитель Q).
При использовании представления (6) помимо реализации алгоритмов вычисления матрицы K
требуется информация о распределения контактных напряжений q. В рамках интегрального под-
хода задача определения контактных напряжений сводится к интегральному уравнению Винера—
Хопфа [18,19], а в общем случае решается с помощью МКЭ [15, 33—35]. При этом в случае тонких
и гибких пьезонакладок связная электромеханическая контактная задача сводится к интегро-диф-
ференциальным уравнениям, для решения которых разработаны и реализованы полуаналитиче-
ские методы [20]. Однако наименее затратным является использование функций q(x, y), заданных
без решения контактной задачи, которые тем не менее дают приемлемые для использования в
разложении (7) значения констант Qn. Диапазон практической применимости такого упрощенного
подхода ограничен низкими и средними частотами, а с ростом частоты (например, когда длина
волны становится меньше диаметра актуатора) отличие численных результатов от эксперимен-
тальных становится существенным. Ниже приводятся экспериментальные и теоретические
результаты, указывающие на пределы практической применимости такой упрощенной модели.
Дефектоскопия
№ 10
2020
32
А.А. Еремин, Е.В. Глушков, Н.В. Глушкова
В силу того, что при деформации растяжения-сжатия вертикально поляризованного тонкого
пьезоэлемента нормальные контактные напряжения σz малы, а радиальные касательные напряже-
ния τrz концентрируются на границах области контакта, одной из популярных является аппрокси-
мация функции q набором дельта-функций, распределенных вдоль границы. В плоском случае
(полосовой актуатор полуширины a:
| x|< a, | y|< ∞) — это модель сосредоточенных сил
(pin-forced model):
τ
rz
=τ
xz
1
=q x)
=τ δ
0
x-a)−δ(x+a)].
(10)
Коэффициент τ0(ω) настраивается в ней в соответствии со спектром заданной посылки V0(ω) и
свойствами пьезонакладки [4]. Аналогично, в случае прямоугольных, круговых и кольцевых акту-
аторов задаются наборы нормальных к границе Ω точечных касательных сил [21—23, 36]:
N
τ
rz
=
r
q x,
y)
=
∑
q
j
δ(x- x
j
,
y− y
j
),
x
j
=
(x
j
,
y
j
,0)∈ ∂Ω
(11)
j
=1
или функций с сингулярностью на границе. Для кругового актуатора радиуса a в качестве радиаль-
2
ной компоненты qr вектора нагрузки q = (qr cosφ, qr sinφ, 0) можно взять
q
r
=q
0
1−(r a)
или
qr =q0δ(r - a),
(12)
где δ(r-a) — кольцевая дельта-функция, обладающая свойством
∞
2π
f (r)δ(r −a)rdr = f (a).
∫
0
Это свойство позволяет получить фурье-символ Q и, соответственно, амплитудные коэффици-
енты бегущих волн an в представлении (7) в явном виде:
∞
(1)
u
=
(z)H
(ζ
r),
r
∑an1)
1
n
n=1
,
r> a
∞
(13)
(1)
u
z
=
∑an2)
(z)H
0
(ζ
n
r),
n=1
(1)
(2)
2
a
n
=
(
a
n
,a
n
)
=-(iζ
n
n
M z),
n
S z))ζ
Qn n
/ 2.
2
2
Здесь
u
= u
+u
— радиальная компонента вектора смещений u,
H
(1) ,
m=
0,1
— функции
r
x
y
m
Ханкеля, Mn и Sn — вычеты в полюсах ζn функций M(α, z) и S(α, z), входящих в представление эле-
ментов матрицы K (их явный вид для однородного изотропного слоя приводится в [22]),
∞
Q
n
=
2
πiq
0
δ(r-a)
J
1
(ζ
n
r)
rdr = iq
0
J
1
(ζ
n
a),
(14)
∫
0
J1 — функция Бесселя первого порядка.
В отличие от представления (7), функции Ханкеля в рядах (13) не заменены их асимптотикой
в дальней зоне, поэтому эти ряды дают точное решение для r > a. При вычислениях в них удержи-
вается конечное число слагаемых, соответствующих вещественным и близким к вещественным
комплексных полюсов ζn.
При больших N модель точечных сил (11) дает те же результаты для кругового актуатора, что
и представление (12), то есть они эквивалентны. При этом модель точечных сил более гибкая,
позволяя описывать действие некруговых и неосесимметричных источников. С другой стороны,
явный вид (14) для коэффициентов Qn, определяющих амплитуды an, позволяет сравнительно
легко определить частоты их оптимального возбуждения («sweet spots» по терминологии работы
[4]; см. также следующий раздел).
Наиболее общим подходом к моделированию работы пьезосенсора является решение связ-
ной электромеханической задачи о набегании поверхностных волн на пьезонакладку или встро-
енный пьезоэлемент. Использование МКЭ или сведение к интегральному уравнению позволяет
получить строгое численное решение этой задачи, но ценой значительных вычислительных
Дефектоскопия
№ 10
2020
Применение пленочных пьезопреобразователей для возбуждения и регистрации...
33
затрат. Поэтому, как и в случае актуатора, в инженерной практике расчеты обычно проводятся
на основе упрощенных моделей.
В пленочных пьезосенсорах основной отклик дает деформация растяжения-сжатия в плоско-
сти (x, y):
/
/
x
y
ε = ∂u
∂x + ∂u
∂y В предположении, что смещения тонкой приклеенной пьезонаклад-
ки совпадают со смещениями поверхности волновода, генерируемый сенсором сигнал аппрокси-
мируется интегралом от деформации поверхности в области контакта Ω [36]:
A
V(
f
)
=
ε
dxdy
(15)
∫∫
S Ω
Здесь A — коэффициент, выражающийся через электромеханические и упругие модули пьезо-
накладки, S — площадь области Ω. Производные компонент вектора смещений вычисляются,
используя точные интегральные представления (5), (6) (численное интегрирование, ближняя зона)
либо представление в виде суммы бегущих волн (7), (13). Последнее позволяет как получать сум-
марный сигнал, так и анализировать вклад отдельных мод.
Отметим, что лазерный виброметр измеряет нормальную компоненту скорости смещения
поверхности в точке регистрации сигнала:
w t)
/
z
= ∂u
∂t , поэтому частотный спектр полученных
сигналов выражается через нормальную компоненту смещений (5), (7) или (13) без дополнитель-
ного интегрирования по области Ω:
(
)
= -iωu x,
).
z
W
f
ω
ЭКСПЕРИМЕНТАЛЬНАЯ ВЕРИФИКАЦИЯ
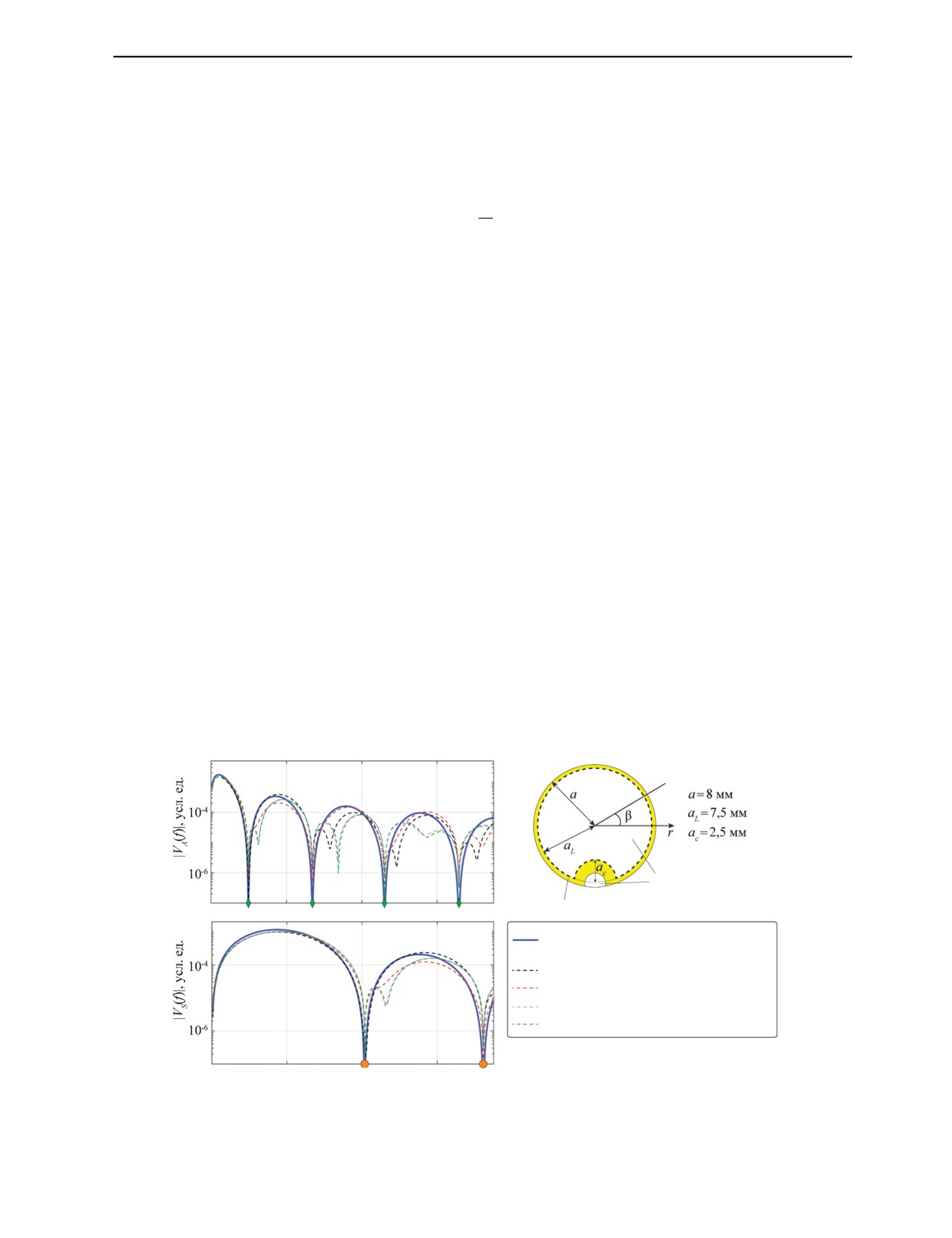
При проведении экспериментальных измерений предварительно определялись частоты опти-
мального возбуждения и регистрации (sweet spots) фундаментальных мод A0 и S0 для используе-
мых образцов (см. рис. 2). На рис. 7а, б приводятся графики амплитуды спектра |VA(f)| и |VS(f)| для
волновых пакетов, приносимых модами A0 и S0, рассчитанные по формуле (15) для соответствую-
щих слагаемых разложения (13), взятых при r = 100 мм. Сплошными линиями в логарифмической
шкале показаны результаты для кругового осесимметричного источника, который моделируется
кольцевой дельта-функцией (11) при условии импульсного нагружения: v0(t) = δ(t). Штриховыми
линиями показаны аналогичные результаты для модели актуатора, учитывающей нарушение кру-
говой симметрии из-за выведенного на поверхность электрода. В этом случае источник моделиру-
ется набором точечных сил (11), расставленных вдоль границы области ΩL, имеющей вид круга с
лункой (штриховая линия на рис. 7в) [23]. Полярный угол β указывает направление от источника
к приемнику.
Частотные зависимости, приведенные на рис. 7, иллюстрируют типичное для размерных источ-
ников чередование диапазонов максимального и минимального возбуждения каждой моды.
а
Мода A
в
0
Электроды
Пьезокерамика PICI151
б
Мода S0
Модель сосредоточенных сил:
круговой актуатор
β = 0°
Модель сосредоточенных сил:
β = 45°
загнутый электрод
β = 90°
β = -90°
0
200
400
600
f, кГц
Рис. 7. Частотные спектры |VA(f)| и |VS(f)| для мод A0 (а) и S0 (б), рассчитанные в рамках модели точечных сил для круго-
вого актуатора (сплошные линии) и при различной ориентации неосесимметричного источника (штриховые линии);
форма кругового актуатора с выведенным на поверхность электродом заземления (в).
Дефектоскопия
№ 10
2020
34
А.А. Еремин, Е.В. Глушков, Н.В. Глушкова
Для кругового источника (12) частоты максимумов и минимумов фактически определяются графи-
ком функции Бесселя J1, входящей в представление (14) амплитудного коэффициента Qn. В рамках
данной упрощенной модели волна Лэмба, соответствующая полюсу ζn, не возбуждается на тех
частотах, на которых ζna = rj, где rj, j = 1, 2, 3, … — нули функции Бесселя: J1(rj) = 0 (на частотных
осях они отмеченных маркерами). При моделировании источника набором точечных сил (11), коэф-
фициенты Qn уже не выражаются через функцию Бесселя J1, но спектры принятых сигналов (штри-
ховые линии) по-прежнему минимальны в окрестности частот, отмеченных маркерами. Графики,
приведенные на рис. 7а, б показывают, что в рассматриваемой части двухмодового диапазона
0 < f < 600 кГц неосесимметричность, связанная с выведенным электродом, не меняет положения
точек минимума, но с ростом частоты отличие от осесимметричного решения становится все замет-
нее, особенно для частотного отклика |VA(f)|. Ниже результаты экспериментальной верификации
приводятся для компьютерной модели, учитывающей неосесимметричность источника.
Результаты измерений, подтверждающие теоретически предсказанные значения частот макси-
мумов и минимумов возбуждения фундаментальных мод, а также соотношение амплитуд локаль-
ных максимумов, приводятся на рис. 8. Слева, на рис. 8а — результаты расчетов (фактически те же,
что и на рис. 7, но не в логарифмическом масштабе, а нормированные на максимальные значения
спектра моды A0: max|VA(f)|), справа, на рис. 8б — результаты измерения сенсором P4 поверхност-
ных волн, возбуждаемых элементом P5 при импульсном нагружении прямоугольной посылкой v(t)
длительностью 0,5 мкс, усиленной до амплитуды 100 В (также нормированные на эксперименталь-
ное значение max|VA(f)|). Сплошными линиями показан спектр суммарного сигнала |V(f)|, штрихо-
выми и штрихпунктирными линиями — спектры мод A0 и S0. Такие же кривые получены и для
сигналов, измеренных остальными сенсорами P1, P2 и P3, расставленными по углам квадрата на
том же расстоянии от источника P5, что подтверждает воспроизводимость измерений и адекват-
ность модели независимо от конкретного положения пьезоэлементов в сети и их ориентации.
а
б
Компьютерная модель
Эксперимент
Рис. 8. Расчетные (а) и измеренные (б) нормированные частотные спектры сигналов, регистрируемых сенсором Р4 при
импульсном нагружении актуатора P5.
С ростом частоты групповые скорости мод стремятся к скорости волны Рэлея, сближаясь
между собой. В результате, высокочастотные составляющие сигналов, принесенные к датчику
волновыми пакетами разных мод, накладываются друг на друга (см., например, рис. 3в и рис. 5а),
затрудняя выделение их частотных спектров. В приведенном примере сложности возникают при
выделении спектра моды A0 при f > 400 кГц (рис. 8б). Тем не менее сопоставление теоретических
и экспериментальных результатов подтверждает хорошую предсказательную способность упро-
щенной модели в рассматриваемом двухмодовом диапазоне.
Стрелками на рис. 8а показаны частоты f = 30, 100, 200 и 400 кГц, выбранные в качестве цен-
тральных для экспериментальной проверки моделирования нестационарных сигналов v(t). Выбор
этих частот обусловлен следующими соображениями:
частота f = 30 кГц — первый локальный максимум спектра (sweet spot) антисимметричной
моды A0, причем в окрестности этой частоты S0 почти не возбуждается;
f = 100 кГц — минимум A0 и хорошая частота для возбуждения S0;
f = 200 кГц — первый локальный максимум спектра S0, но при этом остается значительным и
вклад A0;
Дефектоскопия
№ 10
2020
Применение пленочных пьезопреобразователей для возбуждения и регистрации...
35
f = 400 кГц — первый абсолютный минимум S0 и рядом третий максимум моды A0, который
намного меньше двух предыдущих, т.е. здесь уже трудно ожидать четкого проявления вклада A0
в экспериментальных данных.
На преобразователь P5 подавались узкополосные посылки (3) с выбранными центральными
частотами fc. Расчетные (сплошные линии) и измеренные (штриховые линии) нестационарные сиг-
налы, принятые элементом P4, приведены в левой колонке рис. 9. В правой колонке показаны ампли-
туды частотных спектров исходных управляющих посылок |V0(f)| (сплошные линии) и расчетных
спектров |VA(f)| и |VS(f)|, нормированные на их глобальный максимум (штриховые и штрихпунктир-
ные линии). Отметим, что спектры принятых сигналов равны произведению спектра посылки V0 на
спектры, рассчитанные для импульсной посылки (
0
V
≡
1
), приведенные на рис. 7 и 8.
Рис. 9. Расчетные (сплошные линии) и экспериментальные (штриховые линии) нестационарные сигналы, регистрируемые
сенсором P4 при возбуждении актуатора P5 узкополосными посылками (3) (левый столбец); соответствующие частот-
ные спектры |V0(f)|, |VA(f)| и |VS(f)| (правый столбец).
Сопоставление с результатами эксперимента показывает хорошее совпадение для основных
волновых пакетов, возбуждаемых на оптимальных частотах: A0 при fc = 30 кГц и S0 при fc = 100
и 200 кГц. Причем в последнем случае четко моделируется как основной для данной частоты
волновой пакет S0, так и приходящий чуть позже менее мощный сигнал A0. Во втором и третьем
случае при t > 0,1 мс в экспериментальных данных наблюдаются всплески, которых нет на тео-
ретических кривых. Они вызваны волнами, отраженными от краев пластины, которые не учиты-
ваются в используемой модели бесконечного упругого слоя. При необходимости их несложно
добавить в математическую модель, поместив за пределами пластины мнимые источники зер-
кально относительно ее краев.
Дефектоскопия
№ 10
2020
36
А.А. Еремин, Е.В. Глушков, Н.В. Глушкова
В последнем примере (fc = 400 кГц) волновые пакеты S0 и A0 все еще достаточно разнесены по
времени, и поэтому вклад каждой из мод в расчетный сигнал хорошо различим. Однако в целом
волновая картина уже существенно усложнена и экспериментальные данные сильно зашумлены.
Тем не менее на временных отрезках прохождения основных пакетов по-прежнему наблюдается
совпадение теоретических и экспериментальных сигналов по числу колебаний и их относитель-
ной амплитуде.
P4 → P1
а
P5 → P3
б
в
г
Рис. 10. Примеры моделирования (сплошная линия) и экспериментальной верификации (штриховая линия) сигналов для
различных видов широкополосных и узкополосных тональных посылок и пар актуатор—сенсор.
Рис. 10 иллюстрирует возможность моделирования нестационарных сигналов для других
видов управляющих посылок и пар актуатор — сенсор: (а) — широкополосное возбуждение пря-
моугольным импульсом длительностью 3 мкс и (б) — 4 мкс; (в, г) — узкополосное возбуждение
посылкой (1) с центральной частотой fc = 160 кГц; (а, в) — пара P4 → P1 и (б, г) — пара P5 → P3.
Как и ранее, при t > 0,1 мс в экспериментальных результатах (штриховые линии) наблюдаются
всплески, вызванные неучитываемыми в модели отраженными волнами, в то время как для иду-
щих от источника основных волновых пакетов совпадение хорошее.
ЗАКЛЮЧЕНИЕ
На образце, моделирующем типичный для SHM задач участок распределенной сети актив-
ных пьезосенсоров, проведены измерения, демонстрирующие возможность пленочных пьезоэ-
лементов генерировать и принимать зондирующие сигналы различного вида, а также варьиро-
вать их амплитудно-частотными характеристиками в широком частотном диапазоне. Для рас-
сматриваемых волновых процессов разработана и реализована компьютерная модель, базирую-
щаяся на явных интегральных и асимптотических представлениях. Проведена эксперименталь-
ная верификация, подтверждающая применимость упрощенной версии данной модели (без
строгого решения контактной задачи) для изотропных (металлических) образцов в двухмодо-
вом частотном диапазоне. Возможность численного моделирования волноводных структур
более сложного строения (слоистость, анизотропия, градиентность и др.) показана в работах
[29—32].
Работа выполнена в рамках проекта № 0685-2020-0017 государственного задания Минобрнауки
России № 075-00187-20-02 от 07.04.2020.
СПИСОК ЛИТЕРАТУРЫ
1. Базулин Е.Г. Применение метода двойного сканирования в ультразвуковом неразрушающем
контроле металлов для восстановления изображений модельных дефектов // Дефектоскопия. 2007.
№ 3. С. 54— 68.
Дефектоскопия
№ 10
2020
Применение пленочных пьезопреобразователей для возбуждения и регистрации...
37
2. Kim J.-Y., In C.-W., Sun K.H., Song J.S., Lee J.-H. Imaging defects in laminate composite plates using
focused shear waves generated by air-coupled transducer // Composite Structures. 2016. V. 152. P. 891— 899.
3. Raghavan A., Cesnik C.E.S. Review of guided-wave Structural Health Monitoring // The Shock and
Vibration Digest. 2007. V. 39. P. 91—114.
4. Giurgiutiu V. 2014 Structural Health Monitoring with Piezoelectric Wafer Active Sensors, 2nd Edition.
New-York: Elsevier Academic Press, 2014. 1032 p.
5. Mitra M., Gopalakrishnan S. Guided wave based Structural Health Monitoring: a review // Smart Mater.
Struct. 2016. V. 25. No. 053001. P. 1—27.
6. Викторов И.А. Физические основы применения ультразвуковых волн Рэлея и Лэмба в технике.
М.: Наука, 1966. 168 с.
7. Бабич В.М., Киселев А.П. Упругие волны. Высокочастотная теория. СПб.: БХВ-Петербург, 2014.
320 с.
8. Бреховских Л.М. Волны в слоистых средах. М.: Наука, 1973. 343 с.
9. Ogilvy J.A. A layered media model for ray propagation in anisotropic inhomogeneous materials //
Applied Mathematical Modelling. 1990. V. 14. No. 5. P. 237—247.
10. Hauffe A., Hähnel F., Wolf K. Comparison of algorithms to quantify the damaged area in CFRP
ultrasonic scans // Composite Structures. 2020. V. 235. No. 111791. P. 1—11.
11. Немытова О.В., Ринкевич А.Б., Перов Д.В. Cравнительная классификация дефектов с использо-
ванием методов ультразвуковой томографии и оценки мгновенной частоты эхосигнала // Дефектоско-
пия. 2013. № 6. С. 3—12.
12. Willberg C., Duczek S., Vivar-Perez J.M., Ahmad Z.A.B. Simulation methods for guided wave-based
Structural Health Monitoring: a review // Applied Mechanics Reviews. 2015. V. 67. No. 010803. P. 1—20
13. Nayfeh A.H. The general problem of elastic wave propagation in multilayered anisotropic media //
J. Acoust. Soc. Am. 1991. V. 89. No. 4. P. 1521—1531.
14. Lowe M. Matrix techniques for modeling ultrasonic waves in multilayered media // IEEE Trans.
Ultrason. Ferroelectr. Freq. Control. 1995. V. 42. P. 525—542.
15. Ha S., Chang F.-K. Optimizing a spectral element for modeling PZT-induced Lamb wave propagation
in thin plates // Smart Mater. Struct. 2010. V. 19. No. 015015. P. 1—11.
16. Hasegawa K., Koshiba M., Suzuki M. Finite-element solution for scattering of lamb waves by
asymmetrically located discontinuities in an elastic plate waveguide // Electronics and Communications in
Japan (Part II: Electronics). 1986. V. 69. No. 9. P. 70—80.
17. Casadei F., Rimoli J., Ruzzene M. Multiscale finite element analysis of elastic wave scattering from
localized defects // Finite Elements in Analysis and Design. 2014. V. 88. P. 1—15.
18. Ворович И.И., Бабешко В.А. Динамические смешанные задачи теории упругости для некласси-
ческих областей. М.: Наука, 1979. 320 с.
19. Бабешко В.А., Глушков Е.В., Зинченко Ж.Ф. Динамика неоднородных линейно-упругих сред. М.:
Наука, 1989. 343 c.
20. Glushkov E., Glushkova N., Kvasha O., Seemann W. Integral equation based modeling of the interaction
between piezoelectric patch actuators and an elastic substrate // Smart Mater. Struct. 2007. V. 16. P. 650—664.
21. Glushkov E.V., Glushkova N.V., Kvasha O.V., Lammering R. Selective Lamb mode excitation by
piezoelectric coaxial ring actuators // Smart Mater. Struct. 2010. V. 19. No. 035018. P. 1—7.
22. Glushkov E., Glushkova N., Lammering R., Eremin A., Neumann M.-N. Lamb wave excitation and
propagation in elastic plates with surface obstacles: proper choice of central frequencies // Smart Mater. Struct.
2011. V. 20. No. 015020. P. 1—11.
23. Moll J., Golub M., Glushkov E., Glushkova N., Fritzen C.-P. Non-axisymmetric Lamb wave excitation
by piezoelectric wafer active sensors // Sensors and Actuators A. 2012. V. 174. P. 173—180.
24. Бурков М.В., Еремин А.В., Любутин П.С., Бяков А.В., Панин С.В. Применение ультразвуковой
методики с использованием волн Лэмба для контроля состояния образцов алюминиевого сплава
В96ц3Т12 // Дефектоскопия. 2017. № 12. С. 3—15.
25. Burkov M.V., Lyubutin P.S., Byako A.V. Lamb Wave Ultrasonic Detection of Barely Visible Impact
Damages of CFRP // Russian Journal of Nondestructive Testing. 2019. V. 55. No. 2. P. 89—101.
[Бурков М.В., Любутин П.С., Бяков А.В. Применение ультразвуковой методики с использованием волн
Лэмба для обнаружения малозаметных ударных повреждений углепластиков // Дефектоскопия. 2019.
№ 2. С. 3—15.]
26. Глушков Е.В., Глушкова Н.В., Фоменко С.И., Еремин А.А., Евдокимов А.А., Новиков О.И. Про-
граммный комплекс WAVES-L для моделирования и визуализации волновых процессов в упругом слое
// Вестник ЮУрГУ ММП. 2019. Т. 12. № 1. С. 110—121.
27. Kishimoto K., Inoue H., Hamada M., Shibuya T. Time frequency analysis of dispersive waves by
means of wavelet transform // Journal of Applied Mechanics. 1995. V. 62. P. 841—846.
28. Перов Д.В., Ринкевич А.Б. Локализация отражателей в пластинах при ультразвуковом контроле
волнами Лэмба // Дефектоскопия. 2017. № 4. С. 27—41.
29. Глушков Е.В., Глушкова Н.В., Еремин А.А., Михаськив В.В. Метод слоистых элементов в динами-
ческой теории упругости // Прикладная математика и механика. 2009. Т. 73. Вып. 4. С. 622—634.
Дефектоскопия
№ 10
2020
38
А.А. Еремин, Е.В. Глушков, Н.В. Глушкова
30. Глушков Е.В., Глушкова Н.В., Кривонос А.С. Возбуждение и распространение упругих волн в
многослойных анизотропных композитах // Прикладная математика и механика. 2010. Т. 74. Вып. 3.
С. 419—432.
31. Glushkov E., Glushkova N., Eremin A. Forced wave propagation and energy distribution in anisotropic
laminate composites // J. Acoust. Soc. Am. 2011. V. 129. No. 5. P. 2923—2934.
32. Глушков Е.В., Глушкова Н.В., Фоменко С.И., Жанг Ч. Поверхностные волны в материалах с
функционально-градиентными покрытиями // Акустический журнал. 2012. Т. 58. № 3. C. 370—385.
33. Quaegebeur N., Ostiguy P.-C., Masson P. R. Hybrid empirical/analytical modeling of guided wave
generation by circular piezoceramics // Smart Mater. Struct. 2015. V. 24. No. 035003. P. 1—10.
34. Глушков Е.В., Глушкова Н.В., Евдокимов А.А. Гибридная численно-аналитическая схема для рас-
чета дифракции упругих волн в локально неоднородных волноводах // Акустический журнал. 2018.
Т. 64. № 1. C. 3—12.
35. Golub M.V., Shpak A.N. Semi-analytical hybrid approach for the simulation of layered waveguide with
a partially debonded piezoelectric structure // Applied Mathematical Modelling. 2019. V. 65. P 234—255.
36. Raghavan A., Cesnik C.E.S. Finite-dimensional piezoelectric transducer modeling for guided wave
based structural health monitoring // Smart Mater. Struct. 2005. V. 14. P. 1448—1461.
Дефектоскопия
№ 10
2020