Электромагнитные методы
УДК 620.179.14
ФОРМИРОВАНИЕ ИЗОБРАЖЕНИЙ ЭЛЕКТРИЧЕСКИХ СИГНАЛОВ
ПРЕОБРАЗОВАТЕЛЯ МАГНИТНОГО ПОЛЯ ПРИ ГИСТЕРЕЗИСНОЙ
ИНТЕРФЕРЕНЦИИ ДЛЯ КОНТРОЛЯ МЕТАЛЛОВ В ИМПУЛЬСНЫХ
МАГНИТНЫХ ПОЛЯХ
© 2020 г. В.В. Павлюченко1, Е.С. Дорошевич1,*
1Белорусский Национальный Технический Университет, Республика Беларусь
220013 Минск, пр-т Независимости, 65
*E-mail: es_doroshevich@mail.ru
Поступила в редакцию 29.04.2020; после доработки 28.08.2020
Принята к публикации 31.08.2020
На основании разработанных методов гистерезисной интерференции получены расчетные зависимости U(x) элек-
трического напряжения, снимаемого с преобразователя магнитного поля от координаты x. На магнитный носитель с
арктангенсной характеристикой воздействовали сериями разнополярных импульсов магнитного поля линейного индук-
тора из одного, двух, трех, четырех, пяти и пятнадцати импульсов. Представлен алгоритм последовательности измене-
ний величины суммарной напряженности импульсов магнитного поля на поверхности алюминиевой пластины, обеспе-
чивающий одинаковую амплитуду гистерезисных колебаний электрического напряжения и позволяющий получить
линейную разностную зависимость U(x) для клинообразного и плоского алюминиевых образцов. Полученные резуль-
таты позволяют повысить точность и оперативность контроля толщины объекта и его разнотолщинности в заданных
направлениях, а также дефектов объекта.
Ключевые слова: гистерезисная интерференция, линейное изменение толщины образца, импульсное магнитное
поле, арктангенсная характеристика магнитного носителя.
DOI: 10.31857/S0130308220110044
ВВЕДЕНИЕ
Для контроля электрических свойств объектов из электропроводящих материалов, а также их
геометрических параметров и дефектов сплошности в них используют магнитные, электромагнит-
ные и другие методы контроля. Отметим следующие публикации. Наиболее часто используемым
является вихретоковый метод [1—5]. Здесь представлен контроль трещин и других дефектов, а
также толщин объектов вихретоковым методом. Магнитоиндукционные методы и устройства кон-
троля описаны в [6, 7]. Определение толщины покрытий на деталях сложной геометрии и контроль
никелевых покрытий на двухслойных (неферромагнетик — ферромагнетик) основаниях могут
быть осуществлены магнитодинамическим методом [8—10]. Для определения параметров дефек-
тов сплошности ферромагнитных объектов используется магнитографический метод [11, 12],
который может быть применен для определения толщины металлических объектов.
Теоретические и экспериментальные результаты исследований свойств электропроводящих
объектов с использованием гистерезисных свойств преобразователей магнитного поля, проведен-
ные авторами, изложены в [13—16]. Контроль объектов из электропроводящих материалов в
импульсных магнитных полях с учетом гистерезисных свойств магнитного носителя описан в [13].
Расчет распределений остаточных магнитных полей при гистерезисной интерференции импульс-
ного магнитного поля осуществлен в [14]. В [15, 16] представлены гистерезисные интерференции
перекрывающихся во времени импульсов магнитного поля и магнитного поля перемещаемого
линейного индуктора. Все перечисленные методы и устройства обладают недостатками, вслед-
ствие чего возникает необходимость их совершенствования с целью повышения точности и опера-
тивности контроля, которые могут быть достигнуты с помощью проведения теоретических рас-
четов с применением методов гистерезисной интерференции импульсного магнитного поля.
ОСНОВНЫЕ РЕЗУЛЬТАТЫ
Целью работы является повышение точности и оперативности контроля толщины объектов
и дефектов в них. Поставленная цель достигается путем создания алгоритмов последователь-
ности параметров импульсных магнитных полей, обеспечивающих прямо пропорциональное
соответствие величины электрического напряжения U(x), снимаемого с преобразователя магнит-
ного поля, толщине объекта. Преобразователь считывал информацию с магнитного носителя
Формирование изображений электрических сигналов преобразователя магнитного поля...
39
(МН) по координате x. На объект с МН воздействовали сериями разнополярных импульсов
магнитного поля линейного индуктора из одного, двух, трех, четырех, пяти и пятнадцати
импульсов. При этом проводили анализ зависимостей U(x) на участках в точке x = 0 на проекции
оси индуктора, а также на других участках линии замера объекта вплоть до точек x = ±6h, где h
— высота индуктора над объектом. Теоретические расчеты осуществляли с использованием
формул, полученных авторами ранее в [16]. Для записи магнитных полей применен магнитный
носитель с арктангенсной характеристикой ветвей гистерезиса [16, рис.1].
В работе рассмотрена теоретическая модель следующего эксперимента. На объект с прижатым
к нему магнитным носителем воздействовали импульсами магнитного поля с заданными амплиту-
дами и временами нарастания. После этого рассчитывали величину электрического напряжения U
на выходе магнитной головки, сканирующей МН с выводом электрического сигнала на цифровой
осциллограф и далее — на монитор.
Импульсное магнитное поле создавали с помощью линейного индуктора. Тангенциальную
составляющую напряженности магнитного поля индуктора рассчитывали по формуле [16]:
H = А / (x2 +b2),
(1)
где А — постоянная в А∙ см , x — расстояние в сантиметрах до проекции оси индуктора в плоско-
сти измерения, b — расстояние в сантиметрах от оси индуктора до магнитного носителя.
Зависимость величины электрического напряжения, снимаемого с датчика магнитного поля с
максимальной чувствительностью γmax2 = 0,26 мВ·см/А, при воздействии на МН одним импульсом
магнитного поля в прямом направлении определяли по формуле [16]:
U1= 23,5 + 24,3 arctg (0,011H1 - 1,45),
(2)
а зависимость величины электрического напряжения при воздействии на МН одним импульсом
магнитного поля H1 в прямом направлении и вторым обратным импульсом H2 находили как [16]:
U2 = -23,5 + 0,61U1 + (24,5 + 0,40U1)arctg((0,011 + 0,000087U1) H2 + 1,45 - 0,0016U1).
(3)
Величину U в результате воздействия третьим и последующими импульсами рассчитывали по
формуле (3) с учетом знаков U и H.
В случае использования метода нулевого центрального максимума получали максимальную
чувствительность только в точке, лежащей на проекции оси индуктора. В остальных точках чув-
ствительность не была определена.
Найдем чувствительность метода в различных точках распределения U(x).
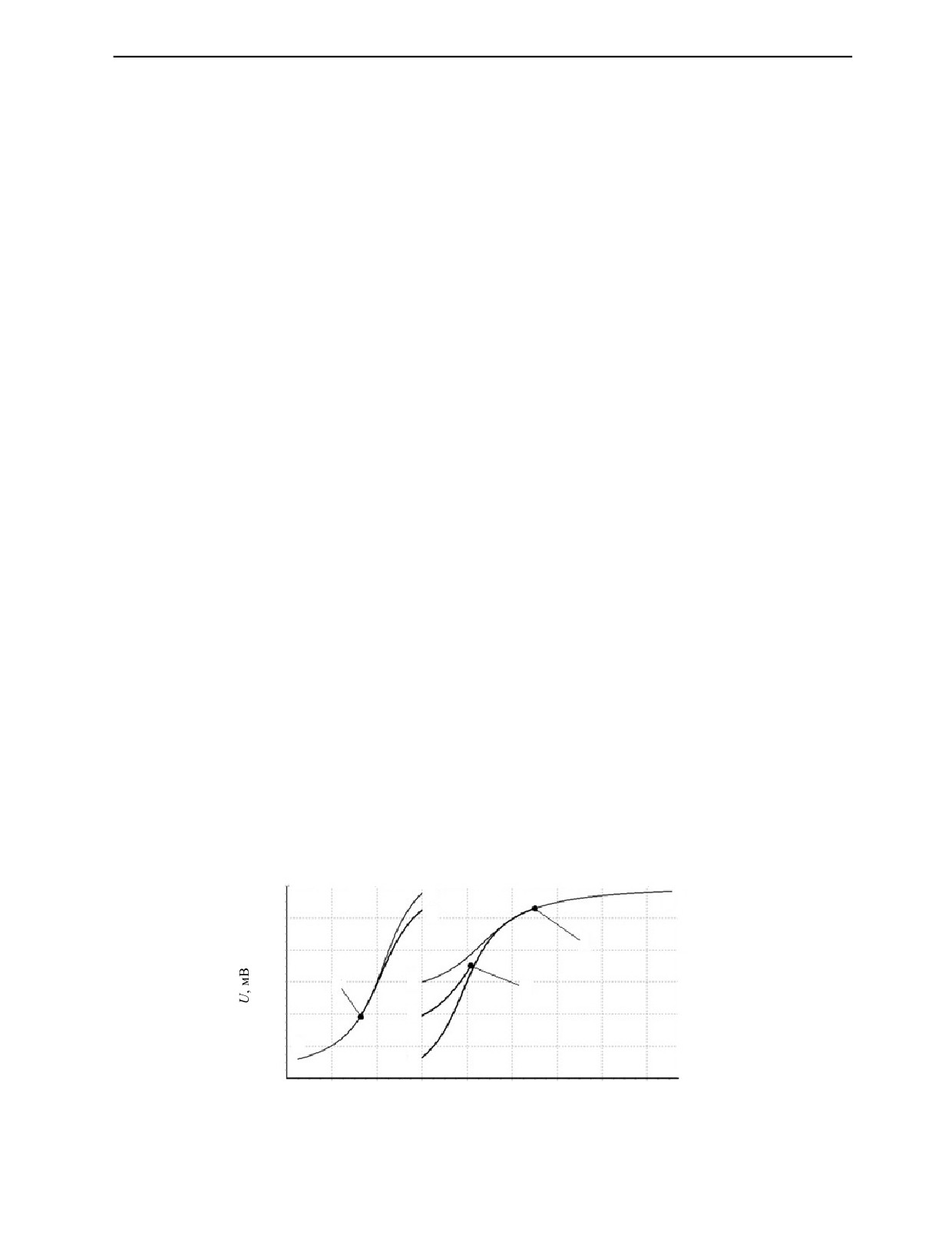
Построим гистерезисные ветви остаточных магнитных полей МН, созданные серией из пяти
последовательных импульсов магнитного поля при x = 0 и b = 0,6 см в (1) следующим образом.
Зададим амплитуды пяти одиночных импульсов с чередующейся полярностью и коэффициента-
ми А в (1) соответственно равными 200 А∙ см, -100 А∙ см, 90 А∙ см, -50 А∙ см и 39,5 А∙ см. Тогда
получаем ветви гистерезиса, показанные на рис. 1.
60
2
1
6
40
5
20
0
7
0
9
-20
8
–40
3
4
-200
-100
0
100
200
300
400
500
H, А/см
Рис. 1. Ветви гистерезиса с начальными и конечными точками 0—9.
Дефектоскопия
№ 11
2020
40
В.В. Павлюченко, Е.С. Дорошевич
Этим значениям коэффициента А соответствуют напряженности магнитного поля 555,56 А/см,
-277,78 А/см, 250,00 А/см, -138,89 А/см и 109,72 А/см.
Начальные и конечные точки обозначены следующим образом: первая ветвь — 0,1; вторая —
2, 3; третья — 4, 5; четвертая — 6, 7 и пятая — 8, 9. Численные значения U составили: 56,807 мВ
(точки 1, 2); -48,154 мВ (3, 4); 45,747 мВ (5, 6); -21,836 мВ (7, 8) и конечной точки пятой ветви
10,231 мВ.
Далее в работе представлены теоретические расчеты воздействия на МН с образцами сериями
импульсов магнитного поля.
Рассчитаем зависимости электрического напряжения U(x), снимаемого с преобразователя маг-
нитного поля, сканирующего магнитный носитель (МН), от расстояния x до оси проекции магнит-
ного индуктора на МН.
Пусть время нарастания импульса составляет tmax = 1,8·10-5 с, а толщина образца из алюминия
порядка d0 = 0,1 мм.
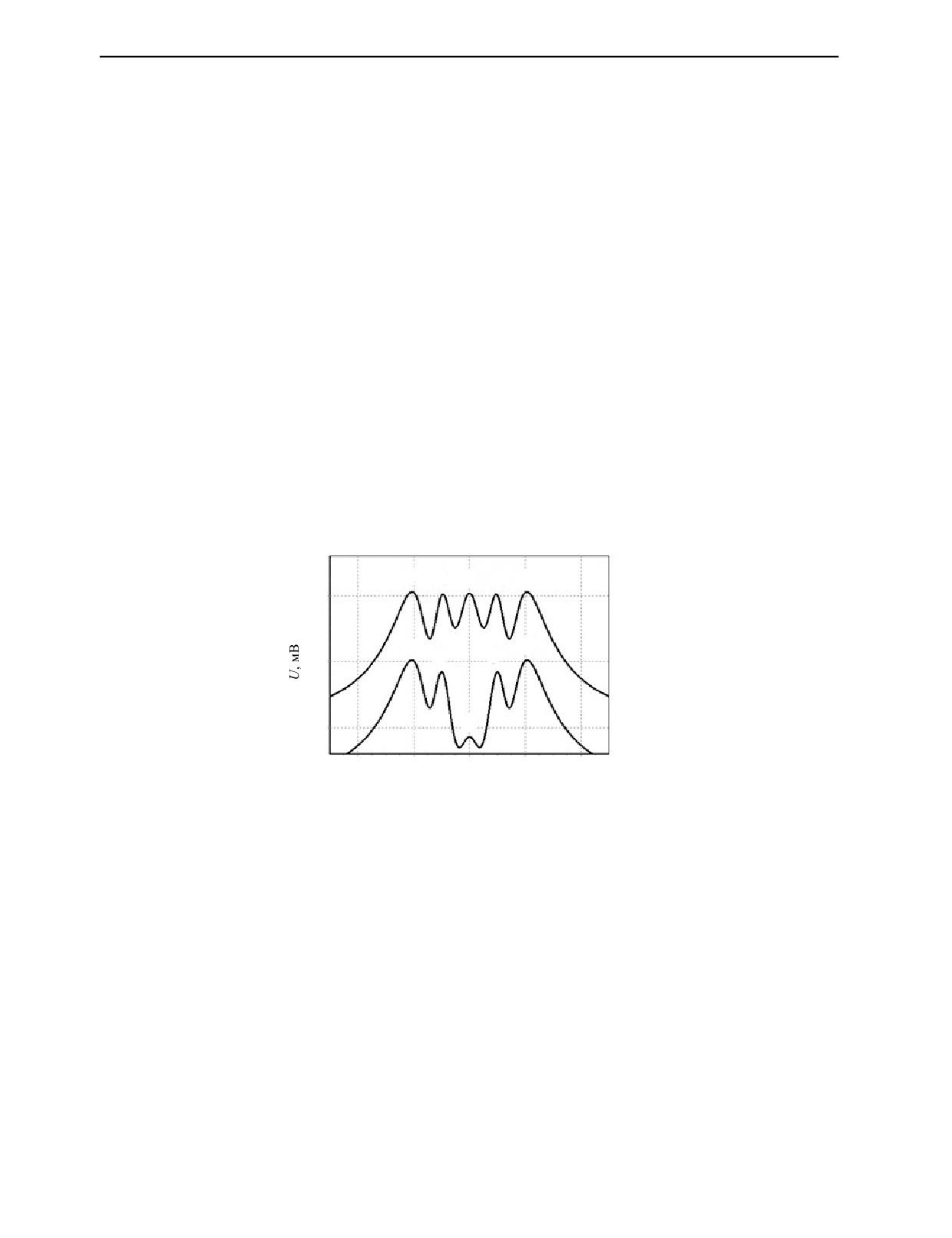
В результате воздействия на МН с образцом серией из пяти импульсов получаем распределе-
ние U(x) с пятью максимумами 1—5, показанное на рис. 2, при постоянных в (1): А11 = 200 А ∙ см,
А12 = -100 А ∙ см, А13 = 90 А ∙ см, А14 = -50 А ∙ см, А15 = 39,5 А ∙ см. Величины коэффициентов А для
толщины алюминиевой пластины d0 = 0,1 мм найдены в [13], исходя из зависимости величины
максимальной напряженности вторичного магнитного поля при указанном времени нарастания
импульса. На рис. 2 также показано распределение U(x) с максимумами 6—10, которому соответ-
ствуют величины А11 = 200 А ∙ см, А12 = -100 А ∙ см, А13 = 92 А ∙ см, А14 = -50 А ∙ см, А15 =
34,5 А ∙ см в (1). Количество максимумов распределения сигнала по координате может не соот-
ветствовать количеству воздействующих на МН импульсов. Так, на рис. 2 показано появление
максимума 8 при изменении коэффициентов третьего и пятого импульсов. При дальнейшем умень-
шении величины коэффициента А пятого импульса максимум 8 исчезает.
1
5
2
3
4
10
6
10
5
7
9
0
8
-2
-1
0
1
2
x, см
Рис. 2. Расчетные зависимости U(x) в результате воздействия пятью импульсами на алюминиевую пластину толщиной
0,1 мм с максимумами 1—5 и 6—10.
Найдем распределение U(x) для алюминиевой пластины в виде клина с линейно изменяющейся
вдоль координаты x толщиной d = d0(1 + 0,2x) при воздействии на нее пятью указанными импуль-
сами (А11 = 200 А ∙ см, А12 = -100 А ∙ см, А13 = 90 А ∙ см, А14 = -50 А ∙ см, А15 = 39,5 А ∙ см) с тем же
временим нарастания. Толщина образца на проекции оси индуктора (x = 0) равна d0 = 0,1 мм.
Согласно [13] для указанного образца в виде клина получаем следующую зависимость величи-
ны тангенциальной составляющей напряженности суммарного магнитного поля вблизи поверх-
ности пластины:
H = H0(1 + 0,04x).
(4)
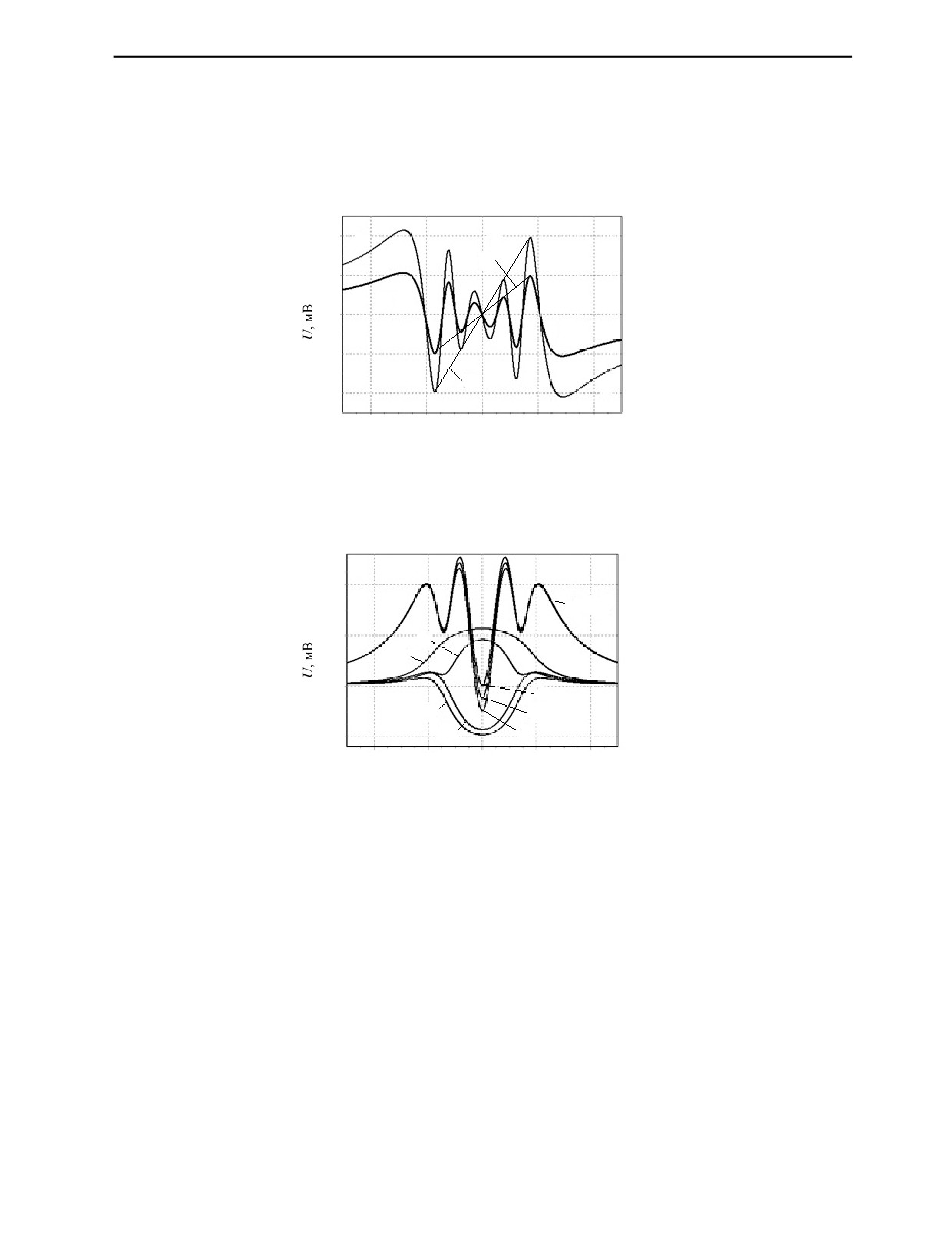
Воздействуем на образец в виде клина пятью импульсами магнитного поля и найдем распреде-
ление U(x) для него, вычтем это распределение из распределения на рис. 2 (зависимость с макси-
мумами 1—5) и получим разностное распределение 1, показанное на рис. 3. На рис. 3 показано
также разностное распределение U(x) для образца толщиной d = d0(1 + 0,1x) и для образца толщи-
ной d = d0. Этому образцу соответствует распределение напряженности магнитного поля
Дефектоскопия
№ 11
2020
Формирование изображений электрических сигналов преобразователя магнитного поля...
41
H = H0(1 + 0,02x).
(5)
На рис. 3 показаны также зависимости 3 и 4 соответственно для зависимостей 1 и 2, получен-
ные по точкам максимумов сигнала для этих кривых и проходящие через точку x = 0, U = 0, кото-
рая соответствует толщине объекта d0. Таким образом, получены линейные зависимости величины
максимумов сигнала от толщины объекта.
0,4
1
4
0,2
2
0
2
-0,2
3
-0,4
1
-2
-1
0
1
2
x, см
Рис. 3. Расчетные зависимости U(x) при воздействии пятью импульсами на МН с образцом:
1 — разностная зависимость для образца толщиной d = d0(1+0,2x) и образца толщиной d = d0; 2 — разностная зависимость для
образца толщиной d = d0(1+0,1x) и образца толщиной d = d0; 3 — зависимость максимумов сигнала для зависимости 1;
4 — зависимость максимумов сигнала для зависимости 2.
10
4, 5, 6
5
3
1
0
7
2
8
–5
10
9
-2
-1
0
1
2
x, см
Рис. 4. Расчетные зависимости U(x) 1—6, 10 с центральными максимумами сигналов 7, 8, 9. Зависимости 1—3 и 10
изображены в масштабе 0,1U.
Применим метод нулевого максимума (участок МН при x = 0, то есть на проекции оси индук-
тора) в случае воздействия на МН с объектом четырьмя импульсами магнитного поля (участок МН
при x = 0 намагничен четыре раза).
На рис. 4 показаны зависимости 1 U(x) после воздействия последовательно первым импульсом
(А11 = 200 А ∙ см), 2 — вторым импульсом (А12 = -100 А ∙ см), 3 — третьим импульсом (А13 =
= 90 А ∙ см) и 4 — четвертым импульсом (А14 = -35,55 А ∙ см) с максимумом 7. Здесь показаны
также зависимости 5 и 6, полученные с изменением коэффициента только четвертого импульса
соответственно для А24 = -36,261 А ∙ см и А34 = -36,972 А ∙ см с максимумами 8 и 9. Центральные
или нулевые максимумы 7—9 (с учетом знака — это минимумы указанных зависимостей) имеют
четвертый порядок, то есть участки МН намагничивались на проекции оси индуктора четыре раза.
Величины максимумов 7, 8 и 9 соответствуют толщине алюминиевой пластины 0,1 мм, 0,11 мм и
0,12 мм [10]. Как видно из рис. 4, чувствительность метода составляет порядка 1000 мВ/см, так как
изменению величины сигнала на 1мВ соответствует изменение толщины образца на 0,01 мм. Из
рис. 3 следует, что чувствительность в случае измерения на остальной части линии замера состав-
ляет порядка 500 мВ/см: величина второго максимума зависимости 1, находящегося на удалении
Дефектоскопия
№ 11
2020
42
В.В. Павлюченко, Е.С. Дорошевич
0,8 см от проекции оси индуктора, равна 4 мВ. В этой точке толщина образца равна 0,116 мм.
Таким образом, чувствительность метода в два раза меньше, чем чувствительность метода нулево-
го максимума. Однако при измерениях отпала необходимость передвижения индуктора над
поверхностью объекта с МН и многочисленных измерений в точках x по линии замера.
Оперативность контроля возросла в десятки раз. Покажем, как можно увеличить размеры участка
контроля по линии замера с увеличением числа воздействующих на объект с МН импульсов маг-
нитного поля без передвижения индуктора.
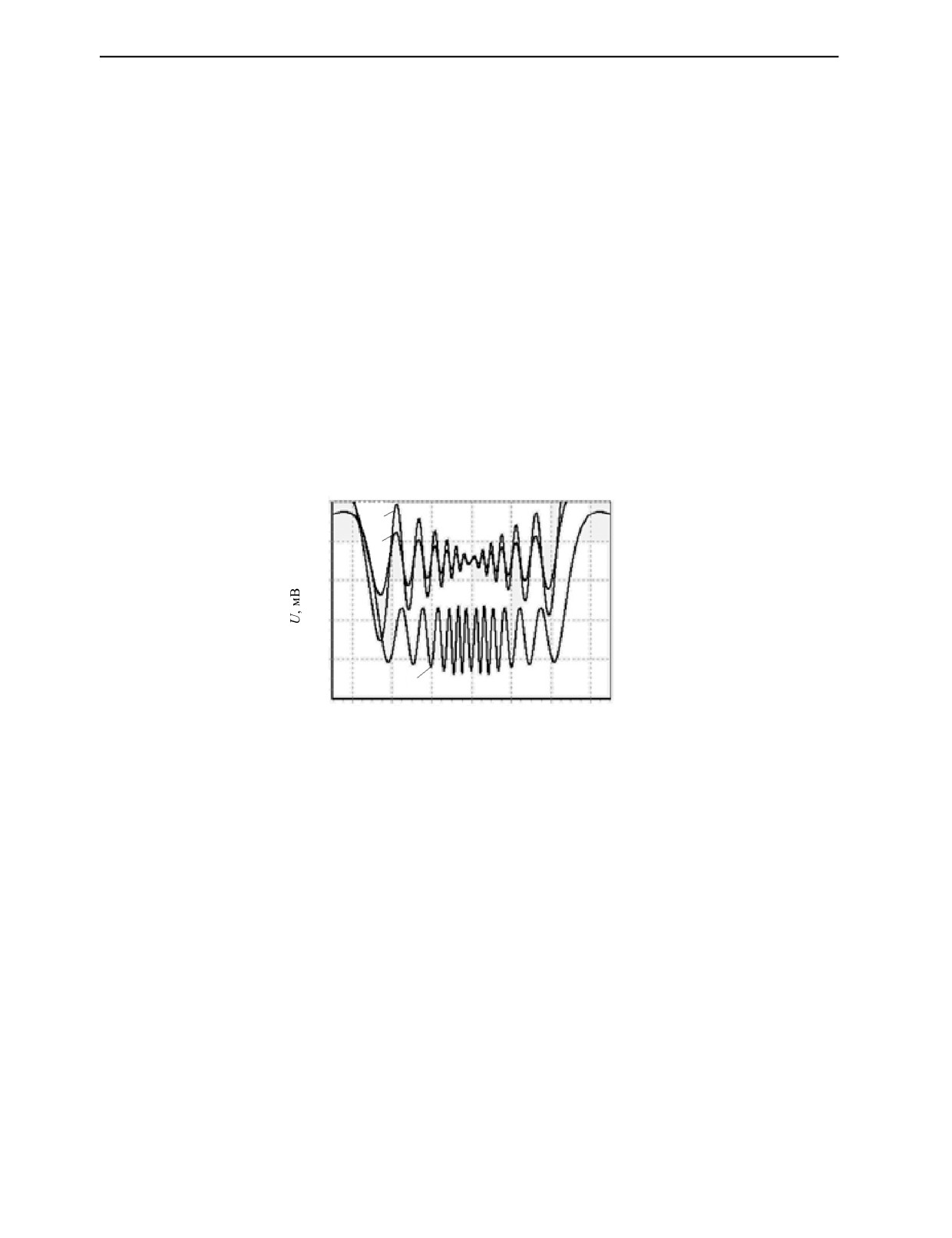
Рассчитаем зависимости электрического напряжения U(x) при воздействии на МН с образцом
толщиной d0 = 0,1 мм серией из пятнадцати импульсов магнитного поля с таким же временем
нарастания. Пусть величина коэффициентов А импульсов в (1) соответствует величине суммарно-
го магнитного поля на поверхности образца, то есть поля индуктора и поля индукционных токов,
и меняется в последовательности: 3200, -2400, 1600, -1200, 800, -600, 400, -300, 200, -151, 100,3,
-77,2, 52,7, -40,85 и 20,05 А·см. В результате получаем распределение 1 U(x), показанное на
рис. 5, с амплитудами напряжения двенадцати максимумов порядка 1,8 мВ. После этого воздей-
ствуем такой же серией импульсов на образец в виде клина толщиной d = d0(1+0,1x). Рассчитаем
распределение U(x) для клинообразного образца, вычтем это распределение из распределения 1
(см. рис. 5) и получим разностное распределение сигнала 2 U(x) с двенадцатью максимумами, изо-
браженное в масштабе 3U(x) с максимальной амплитудой пятого максимума порядка 0,7 мВ
(2,3 мВ ∙ 0,3 = 0,69 мВ). Из рис. 5 (зависимость 2 и 3) видно, что амплитуда импульсов изменяется
линейно с увеличением x, как и при воздействии на клинообразный образец пятью импульсами
магнитного поля (см. зависимости 3 и 4, рис. 3).
2
2
1
3
0
-1
-2
1
-6
-4
-2
0
2
4
6
x, см
Рис. 5. Расчетные зависимости U(x) при воздействии 15 импульсами:
1 — для образца толщиной d0 = 0,1 мм; 2 — разностная зависимость для образца толщиной d = d0(1+0,1x) и образца толщиной d = d0;
3 — разностная зависимость для образца толщиной d = d0(1+0,05x) и образца толщиной d = d0.
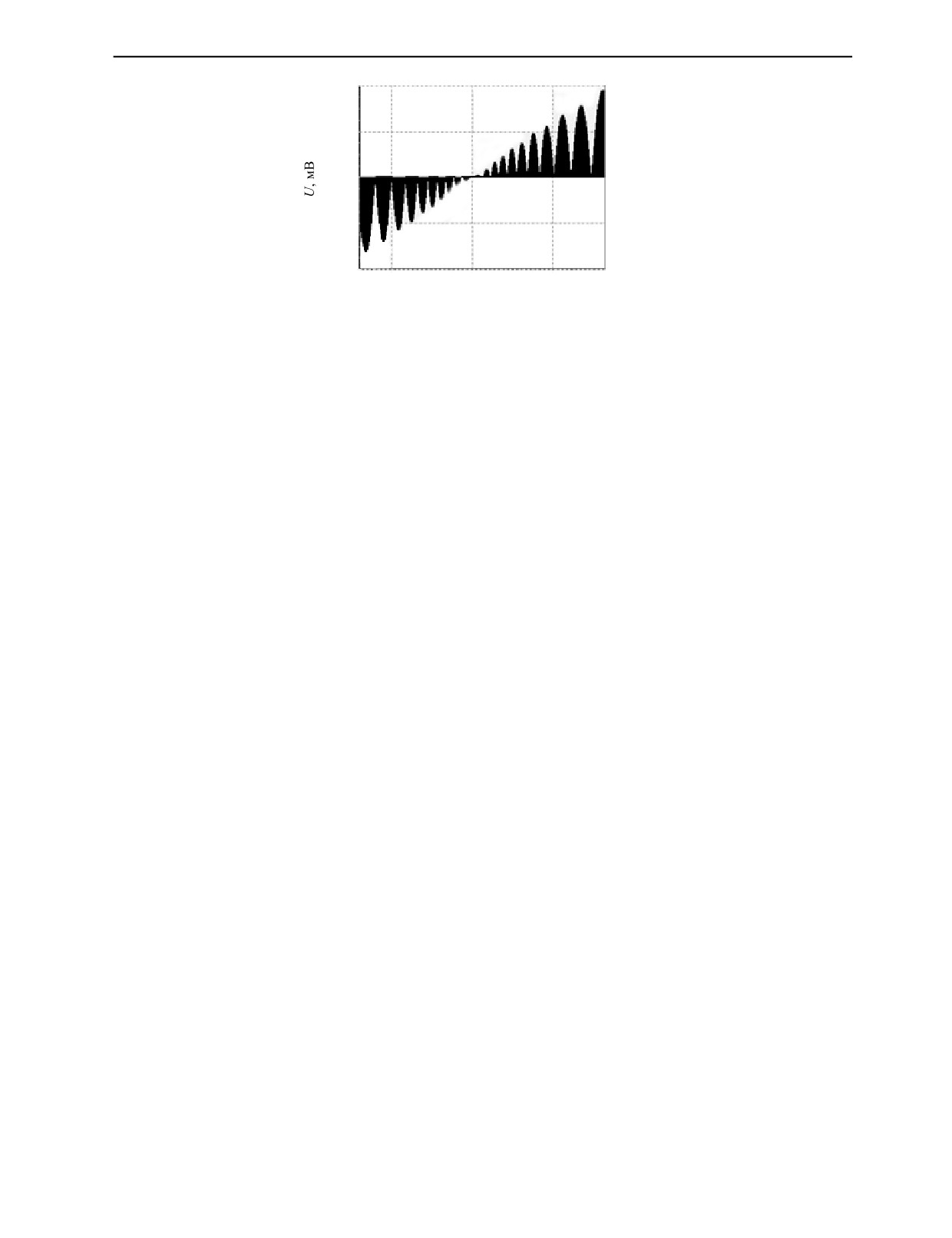
Построим оптическое изображение распределения магнитных полей соответствующее раз-
ностному распределению U(x) для образца клинообразной формы толщиной d = d0(1+0,05x) и
образца толщиной d0 = 0,01 мм, изображенное на рис. 5 (зависимость 3). При этом учтем, что тол-
щина образца d увеличивается с увеличением x. Тогда получаем оптическое изображение сигнала,
показанное на рис. 6.
При построении оптического изображения на рис. 6 проведены операции инвертирования и
смещения относительно оси U = 0. Это сделано следующим образом. Сначала путем смещения на
-0,5 мВ установлен нулевой уровень сигнала при х = 0. После этого части графика функций
U ≥ 0 при х ≤ 0 и U ≤ 0 при х ≥ 0 заменены графиками зеркальных функций, в результате чего
максимумы и слева и справа от точки х = 0 стали однополярными и их количество увеличилось в
2 раза, то есть разрешающая способность измерений по координате х увеличена вдвое. При этом
максимальные значения однополярных импульсов увеличены в 2 раза с тем, чтобы они соответ-
ствовали амплитуде импульсов.
Проведены также последующие смещения нулевого уровня сигнала, обеспечивающие пере-
сечение точки U = 0, х = 0 линейными отрезками прямых, построенных на максимумах сигнала,
при отрицательных и положительных значениях аргумента х.
Полученные с использованием разработанного метода контроля оптические изображения
на рис. 6 позволяют оперативно и с высокой точностью определять толщину металлических объ-
Дефектоскопия
№ 11
2020
Формирование изображений электрических сигналов преобразователя магнитного поля...
43
0,4
0,2
0
-0,2
-0,4
-2
0
2
x, см
Рис. 6. Оптические изображения распределения U(x) разностного сигнала для образца клинообразной формы толщиной
d = d0(1+0,05x) и образца толщиной d = d0.
ектов. Так, воздействие пятнадцатью указанными импульсами может быть осуществлено за время,
меньшее 1·10-3 с, а при считывании информации могут быть применены преобразователи магнит-
ного поля, работающие в реальном масштабе времени (магнитооптическая пленка, пленочные
флюкс-детекторы и так далее).
Последовательность значений А импульсов (см. рис. 5, зависимость 1) выбрана таким образом
для того, чтобы получить линейную зависимость величины разностного сигнала от толщины
образца. Зависимости 1—3 на рис. 5 описывают гистерезисные колебания U(x), характеризуемые
амплитудой, частотой и фазой. Величины пиков разностного распределения зависят от разности
величин соответствующих пиков уменьшаемого и вычитаемого распределений. Однако при изме-
нении толщины пластины в направлении x происходит смещение максимумов, то есть изменяется
период колебаний U(x).
Как показали расчеты, для того, чтобы получить линейную (близкую к линейной) разностную
зависимость U(x) следует установить одинаковые амплитуды всех колебаний не разностных зави-
симостей. В этом случае на результат влияет преимущественно второй фактор, то есть изменение
периода колебаний. Так, на рис. 5 зависимость 1 для образца толщиной d0 содержит двенадцать
максимумов с амплитудами примерно 1,8 мВ. Зависимость U(x) для образца толщиной
d = d0(1+0,05x) имеет близкие к зависимости 1 величины максимумов, но эти максимумы сдвину-
ты по оси x. Чем дальше от точки x = 0, тем больше этот сдвиг, в результате чего получаем раз-
ностное распределение 3 с явно выраженной линейной зависимостью величины пиков от толщины
образца, не смотря на то, что амплитуды сигналов распределения 1 (см. рис. 5) все же отличаются
друг от друга на несколько процентов.
Таким образом, определен алгоритм последовательности изменений величины суммарной
напряженности импульсов магнитного поля на поверхности алюминиевой пластины толщиной
d0, обеспечивающий одинаковую амплитуду двенадцати гистерезисных колебаний электрическо-
го напряжения U3(x) в заданном интервале значений аргумента -4 см ≤ x ≤ 4 см (см. рис. 5). Из
рис. 5 и 6 видно, что этот алгоритм позволяет получить линейную (близкую к линейной) раз-
ностную зависимость U5(x) = U4(x) - U3(x), где U4(x) — зависимость для клинообразного алюми-
ниевого образца, толщина которого при x = 0 равна d0. Оптические изображения распределения
U(x) разностного сигнала (см. рис. 6) дают возможность определять толщину объектов не только
по максимумам сигналов, но и по всем точкам огибающих их линий путем сравнения растровых
изображений с аналогичными изображениями для объектов с известными свойствами. Параметры
этой разностной зависимости определяются изменением амплитуды и периода гистерезисных
колебаний U(x) с увеличением расстояния x до точки отсчета x = 0, что обусловлено зависимо-
стью напряженности вторичного магнитного поля от толщины клина.
Полученные линейные разностные зависимости U(x) позволяют повысить точность и опера-
тивность измерений, так как обеспечивают прямо пропорциональное соответствие величины элек-
трического напряжения U(x), снимаемого с преобразователя магнитного поля, толщине объекта.
При этом улучшается наглядность анализа изображений U(x) при их сравнении с изображениями
объектов и возрастает точность проведения расчетов за счет использования точных (прямо про-
порциональных) математических преобразований. Разработанный метод может быть использован
для контроля поверхностных и внутренних дефектов сплошности объектов. Найденный алгоритм
Дефектоскопия
№ 11
2020
44
В.В. Павлюченко, Е.С. Дорошевич
последовательностей напряженности магнитных полей (величин А) позволяет устанавливать соот-
ветствие разностного распределения электрического напряжения U(x) распределению толщины
контролируемого объекта по координате x не только при линейных изменениях толщины объекта.
Предложенный метод контроля с использованием гистерезисной интерференции импульсного
магнитного поля не подвержен влиянию электрических наводок при записи сигнала, как это проис-
ходит случае вихретокового, магнитодинамического, магнитоиндукционного и других методов. Этот
метод обладает высокой чувствительностью и разрешающей способностью. В отличие от перечис-
ленных выше методов он не требует сканирования поверхности объекта точечным преобразователем
при контроле и запись вторичных магнитных полей объектов из диамагнитных и парамагнитных
металлов может быть осуществлена одновременно на площади в несколько квадратных сантиметров
и более воздействием одного импульса сложной формы со временем действия порядка одной мил-
лисекунды. Более того, при визуализации магнитного поля магнитного носителя с помощью магни-
тооптической пленки или пленочного флюкс-детектора контроль может быть осуществлен в реаль-
ном масштабе времени, то есть в течение времени указанного импульса.
Метод позволяет вести контроль как в статическом состоянии объекта, так и при его движе-
нии. Он может быть осуществлен для контроля одновременно всего объекта или его отдельных
частей, что очень важно при изучении каких-либо процессов, протекающих в объекте. Так,
может происходить скоростное изменение параметров объекта, например, его толщины или
удельной электропроводности различных участков или изменение геометрических размеров
объекта при его деформации. При этом следует найти («сфотографировать») функции распреде-
ления напряженности магнитного поля в любые заданные моменты времени одновременно на
всей контролируемой поверхности. Таким образом могут быть определены параметры других
металлических объектов, появляющихся за контролируемым объектом в разные моменты време-
ни. Может быть также осуществлена запись поверхностных или объемных распределений неиз-
вестных магнитных полей, несущих какую-либо информацию извне путем наложения на них
импульсных магнитных полей с заданными параметрами в заданные моменты времени с полу-
чением гистерезисной интерференции.
ВЫВОДЫ
На основании разработанного метода гистерезисной интерференции получены расчетные
зависимости U(x) электрического напряжения, снимаемого с преобразователя магнитного поля,
сканирующего магнитный носитель от расстояния x до оси проекции линейного индуктора на
магнитный носитель (МН). На МН с арктангенсной характеристикой воздействовали сериями раз-
нополярных импульсов магнитного поля линейного индуктора из одного, двух, трех, четырех, пяти
и пятнадцати импульсов. При этом проводили анализ зависимостей U(x) на проекции оси индук-
тора (x = 0), а также на других участках линии замера объекта вплоть до точек x = -6h и x = 6h, где
h — высота индуктора над объектом. Найдены распределения снимаемого сигнала по заданной
координате при линейных изменениях толщины пластины по формулам: d = d0(1 + 0,2x);
d = d0(1 + 0,1x); d = d0(1 + 0,05x). Толщина алюминиевой пластины порядка 0,1 мм, время нарас-
тания импульса 1,8 · 10-5с.
Представлен алгоритм последовательности изменений величины суммарной напряженности
импульсов магнитного поля на поверхности алюминиевой пластины толщиной d0, обеспечиваю-
щий одинаковую амплитуду гистерезисных колебаний электрического напряжения U3(x) в задан-
ном интервале значений аргумента.
Установлено, что этот алгоритм позволяет получить линейную (близкую к линейной) разност-
ную зависимость U5(x) = U4(x) - U3(x), где U4(x) — зависимость для клинообразного алюминиево-
го образца, толщина которого при x = 0 равна d0. Показано, что параметры этой разностной зави-
симости определяются изменением амплитуды и периода гистерезисных колебаний U(x) с увели-
чением расстояния x до точки отсчета x = 0, что обусловлено зависимостью напряженности вто-
ричного магнитного поля от толщины клина. Установлено, что оптические изображения распреде-
ления U(x) разностного сигнала дают возможность определять толщину объектов не только по
максимумам сигналов, но и по всем точкам огибающих их линий путем сравнения растровых
изображений с аналогичными изображениями для объектов с известными свойствами.
Разработанный метод улучшает наглядность анализа изображений U(x) при их сравнении с изо-
бражениями объектов и повышает точность проведения расчетов за счет использования точных
(прямо пропорциональных) математических преобразований. Найденный алгоритм последователь-
ностей напряженности магнитных полей позволяет устанавливать соответствие разностного распре-
Дефектоскопия
№ 11
2020
Формирование изображений электрических сигналов преобразователя магнитного поля...
45
деления напряженности электрического напряжения U(x) распределению толщины контролируемого
объекта по координате x не только при линейных изменениях толщины объекта. В отличие от других
методов он не требует сканирования поверхности объекта точечным преобразователем при контроле
и запись вторичных магнитных полей объектов из диамагнитных и парамагнитных металлов может
быть осуществлена одновременно на площади в несколько квадратных сантиметров и более воздей-
ствием одного импульса сложной формы со временем действия порядка одной миллисекунды. Более
того, при визуализации распределений магнитных полей, записанных на магнитном носителе, с
помощью магнитооптической пленки или пленочного флюкс-детектора контроль может быть осу-
ществлен в реальном масштабе времени, то есть в течение времени действия указанного импульса.
Метод позволяет вести контроль как в статическом состоянии объекта, так и при его движении.
Он может быть использован для изучения каких-либо процессов, протекающих в объекте.
Например, изменения со временем толщины или удельной электропроводности различных участ-
ков объекта или изменения геометрических размеров объекта при его деформации.
Указанный метод может быть использован для контроля поверхностных и внутренних дефек-
тов сплошности объектов.
Полученные результаты позволяют повысить точность и оперативность определения толщины
объекта и его разнотолщинности в заданных направлениях, а также дефектов сплошности объекта.
СПИСОК ЛИТЕРАТУРЫ
1. Астахов В.И., Данилина Э.М., Ершов Ю.К. К вопросу о диагностике пластины с трещиной вих-
ретоковым методом // Дефектоскопия. 2018. № 3. С. 39—49.
2. Шубочкин А.Е., Ефимов А.Г. Современные тенденции развития вихретоковой дефектоскопии и
дефектометрии // Контроль. Диагностика. М. 2014. № 3. С. 68—73.
3. Ферстер Ф. Неразрушающий контроль методом магнитных полей рассеяния. Теоретические и
экспериментальные основы выявления поверхностных дефектов конечной и бесконечной глубины //
Дефектоскопия. 1984. № 12. С. 13—18.
4. Kiselev E.K., Gol’dshtein A.E. Eddy-Current System for Testing Inner Diameter of Pipes // Russian
Journal of Nondestructive Testing. 2019. V. 55. No. 3. P. 210—216. [Киселев Е.К., Гольдштейн А.Е.
Вихретоковая система контроля внутреннего диаметра труб // Дефектоскопия. 2019. № 3. С. 25—30.]
5. Санников М.А. Влияние кривизны поверхности трубопровода при диагностике вихретоковыми
приборами // Контроль. Диагностика. 2006. № 9. С. 24—27.
6. Суханов Д.Я., Совпель Е.С. Магнитоиндукционный интроскоп для дефектоскопии металлических
объектов // Дефектоскопия. 2015. № 5. С. 56—62.
7. Суханов Д.Я., Совпель Е.С. Магнитоиндукционная томография электрических схем и приборов //
Известия высших учебных заведений. 2015. Т. 58. № 10/3. С. 73—75.
8. Лухвич А.А., Лукьянов А.Л., Шукевич Я.И., Шукевич А.К., Полякова М.Н., Мосякин В.В. Толщино-
метрия покрытий на деталях сложной геометрии // Дефектоскопия. 2013. № 7. С. 13.
9. Лухвич А.А., Булатов О.В., Лукьянов А.Л. Контроль толстослойных никелевых покрытий на двух-
слойных (неферромагнетик—ферромагнетик) основаниях магнитодинамическим методом толщиноме-
трии // Дефектоскопия.
2014. № 4. С. 3—12.
10. Лухвич А.А., Булатов О.В., Лукьянов А.Л., Полякова М.Н., Мосякин В.В. Контроль магнитодина-
мическим методом толщины никелевых покрытий подхромовыми на двухслойных (неферромагне-
тик—ферромагнетик) основаниях // Дефектоскопия.
2015. № 1. С. 3—10.
11. Козлов В.С. Техника магнитографической дефектоскопии. Мн.: Вышэйшая школа, 1976. 256 с.
12. Грузинцев А.А., Михайлов С.П. Самосогласованный расчет магнитного поля для задач магнит-
ной дефектоскопии. Ι. Исходная модель для расчета поля магнитной ленты, намагниченной от прово-
дника с током // Дефектоскопия. 2011. № 2. С. 22—30.
13. Павлюченко В.В., Дорошевич Е.С. Неразрушающий контроль объектов из электропроводящих
материалов в импульсных магнитных полях // Дефектоскопия. 2010. № 11. С. 29—40.
14. Pavlyuchenko V.V., Doroshevich E.S. Calculating Distributions of Pulsed Magnetic Fields under
Hysteretic Interference // Russian Journal of Nondestructive Testing. 2018. V. 54. No. 2. P. 121—127.
[Павлюченко В.В., Дорошевич Е.С., Пивоваров В.Л. Расчеты распределений импульсных магнитных
полей при гистерезисной интерференции // Дефектоскопия. 2018. № 2. С. 41—47.]
15. Pavlyuchenko V.V., Doroshevich E.S. Hysteretic Interference of Time-Overlapping Magnetic Field
Pulses // Russian Journal of Nondestructive Testing. 2019. V. 55. No. 12. P. 949—956. [Павлюченко В.В.,
Дорошевич Е.С. Гистерезисная интерференция перекрывающихся во времени импульсов магнитного
поля // Дефектоскопия. 2019. № 12. С. 56—63.]
16. Pavlyuchenko V.V., Doroshevich E.S. Hysteretic Interference of Magnetic Field of a Moving Linear
Inductor // Russian Journal of Nondestructive Testing. 2020. V. 56. No. 1. P. 49—57. [Павлюченко В.В.,
Дорошевич Е.С. Гистерезисная интерференция магнитного поля перемещаемого линейного индуктора
// Дефектоскопия. 2020. № 1. С. 51—60.]
Дефектоскопия
№ 11
2020