Радиоволновые методы
УДК 620.179.18
МОДЕЛЬНОЕ ИССЛЕДОВАНИЕ ПО КОНТРОЛЮ УТЕЧЕК НЕФТИ
ИЗ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ С ИСПОЛЬЗОВАНИЕМ
ГЕОРАДИОЛОКАЦИОННОЙ СТАНЦИИ
© 2020 г. Лэй Гао1,2,3,*, Хантао Сон1, Ханлонг Лю4, Чуан Хан1, Юмин Чен1
1Ведущая лаборатория Министерства образования по геомеханике и проектированию дамб, Университет
Хохай, Нанкин 210098, Цзянсу, Китай
2Ведущая лаборатория гидротехники и водного транспорта Министерства образования, Чунцинский
университет Цзяотун, Чунцин, 400074, Китай
3Национальный инженерно-исследовательский центр по регулированию внутренних водных путей,
Чунцинский университет Цзяотун, Чунцин, 400074, Китай
4Институт гражданского строительства, Университет Чунцина, Чунцин, 400045,Китай
E-mail: *gaoleihhu@hhu.edu.cn
Поступила в редакцию 09.08.2018; после доработки 27.12.2019
Принята к публикации 23.03.2020
Подземные трубопроводы в процессе эксплуатации часто испытывают нарушение целостности, поскольку они
находятся под землей, существует проблема с утечками особенно в городских районах, поэтому трудно контроли-
ровать и оценивать распределение загрязненния грунта. Важно проводить эффективный контроль и оценку состоя-
ния подземных трубопроводов и загрязненного грунта. Для обнаружения подземных трубопроводов и загрязненного
грунта был применен георадар, в основе работы которого лежит явление распространения электромагнитных волн.
Эксперименты проводились на трубах с различными размерами, материалами этих труб, глубиной залегания в разра-
ботанном нами прозрачном модельном резервуаре, а также в условиях, моделирующих утечку нефти из трубопровода.
Сигнал радара обрабатывается с использованием программного обеспечения GRED HD, получается одноканальная
форма сигнала подземных трубопроводов и загрязненного грунта. Метод конечных разностей во временной области
используется для анализа нестационарных сигналов георадара. Обсуждаются радиолокационные сигналы подземных
трубопроводов с различными параметрами и вариациями вследствие утечки нефти. Улучшена точность интерпрета-
ции данных по радиолокации подземных трубопроводов и загрязненного грунта. Данная работа является основой для
связанных исследований в будущем.
Ключевые слова: подземные трубопроводы, загрязненный грунт, георадиолокационная станция, модельный исследо-
вание, метод конечных разностей во временной области.
DOI: 10.31857/S013030822005005X
1. ВВЕДЕНИЕ
Размещение подземных трубопроводов, как часть жизненно важных городских коммуника-
ций, становится все более сложным в условиях быстрой урбанизации [1—5]. В большинстве
городов еще не создана полноценная сеть подземных трубопроводов и система их обслуживания
[6—12]. Из-за неполных или отсутствующих актуальных данных о положении трубопроводов
во многих местах по всему миру происходили аварии, вызванные раскопками подземных тру-
бопроводов, а также остаются особенно острыми проблемы утечки в трубопроводах [13—15].
Стандартный метод обнаружения труб заключается в случайных раскопках, потому такие работы
являются трудозатратными. Трудно обнаружить скрытые дефекты трубопровода [16—19]. Ме-
тод георадиолокации обладает такими преимуществами, как высокая эффективность, высокая
точность, хорошее обнаружение подземных заглубленных объектов, а также то, что метод явля-
ются неразрушающим [20—23]. Метод соответствует требованиям по обнаружению подземных
трубопроводов и загрязненной почвы [24—27]. Однако при проведении процедуры георадио-
локации не получают изображения подземных трубопроводов и их спектральные характеристи-
ки. Без точной информации о местоположении, материале трубопровода и загрязненном грунте,
образованном утечкой нефти из трубопровода, нельзя судить о состоянии трубопровода. Также
отсутствуют исследования по перемещению труб в грунте. В данной статье предпринята попыт-
ка провести исследование подземного трубопровода и утечки нефти с использованием метода
георадиолокации, проанализированы данные, получены характеристики сигналов подземного
трубопровода и загрязненного грунта.
36
Лэй Гао, Хантао Сон, Ханлонг Лю и др.
2. КОНТРОЛЬ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ И УТЕЧКИ НЕФТИ ИЗ НИХ
2.1. Испытательное оборудование и приборы
В этом испытательном оборудовании используется итальянский высокочастотный радар
IDS серии RIS, который показан на рис. 1. Это портативное устройство с высокой скоростью
передачи, высокой скоростью сканирования, хорошим экранированием антенны и шириной
пропускания, высокой стабильностью сигнала, высоким разрешением, высокой чувствитель-
ностью, водонепроницаемостью, пыленепроницаемостью и т.д. Комплектация включает в себя
антенны, работающие на частотах от 25 до 2500 МГц, в том числе антенну, принимающую
электромагнитную волну, которая распространяется в воздухе, антенну, принимающую волну,
которая распространяется в земле, и другие различные антенны. Это может удовлетворить са-
мые обширные требования к процедуре контроля.
а
б
г
в
Рис. 1. Хост и антенны радара: хост радара (а); 1600MГц-антенна (б); 400MГц-антенна (в); 100MГц-aнтеннa (г).
Чтобы облегчить размещение материала и наблюдение за ним во время модельного ис-
пытания, для почвы, имитирующей среду вокруг трубы, был сделан модельный резервуар с
прозрачным волокнистым пластиком (рис. 2). Внутренние размеры резервуара для модельных
испытаний составляют 80×40×50 см (длина×ширина×высота). После нескольких предвари-
тельных испытаний было подтверждено, что резервуар мало влияет на результаты измерений
георадаром.
Рис. 2. Резервуар для модельных испытаний.
Рис. 3. Песок, просушенный воздухом.
Во время измерений использовалась смесь осушенного воздухом песка с однородной почвой
(как показано на рис. 3) в качестве засыпки, чтобы минимизировать влияние слоя почвы на ре-
зультаты. Песок, просушенный воздухом, имеет размер частиц 0,25 мм ± 0,5 мм, а плотность
заполнения составляет 1900 кг/м3. Высота заполнения составляет 0,4 м, а расстояние от верхнего
края — 10 см, что явно подходит для радиолокационных исследований. Были подготовлены от-
дельные трубы из разных материалов. В табл. 1 указаны детали.
Дефектоскопия
№ 5
2020
Модельное исследование по контролю утечек нефти из подземных трубопроводов...
37
Таблица
1
Параметры труб
Материал трубы
Диаметр, мм
Длина, см
Поливинилхлорид (ПВХ)
70
Полиэтилен (ПЭ)
63
70
Чугун
70
Машинное масло используется в качестве наполнителя трубопровода во время испытания. Для
того чтобы смоделировать процесс утечки нефти в трубопроводе, масло вводится в трубопровод
через водопроводную трубку, соединенную с трубопроводом.
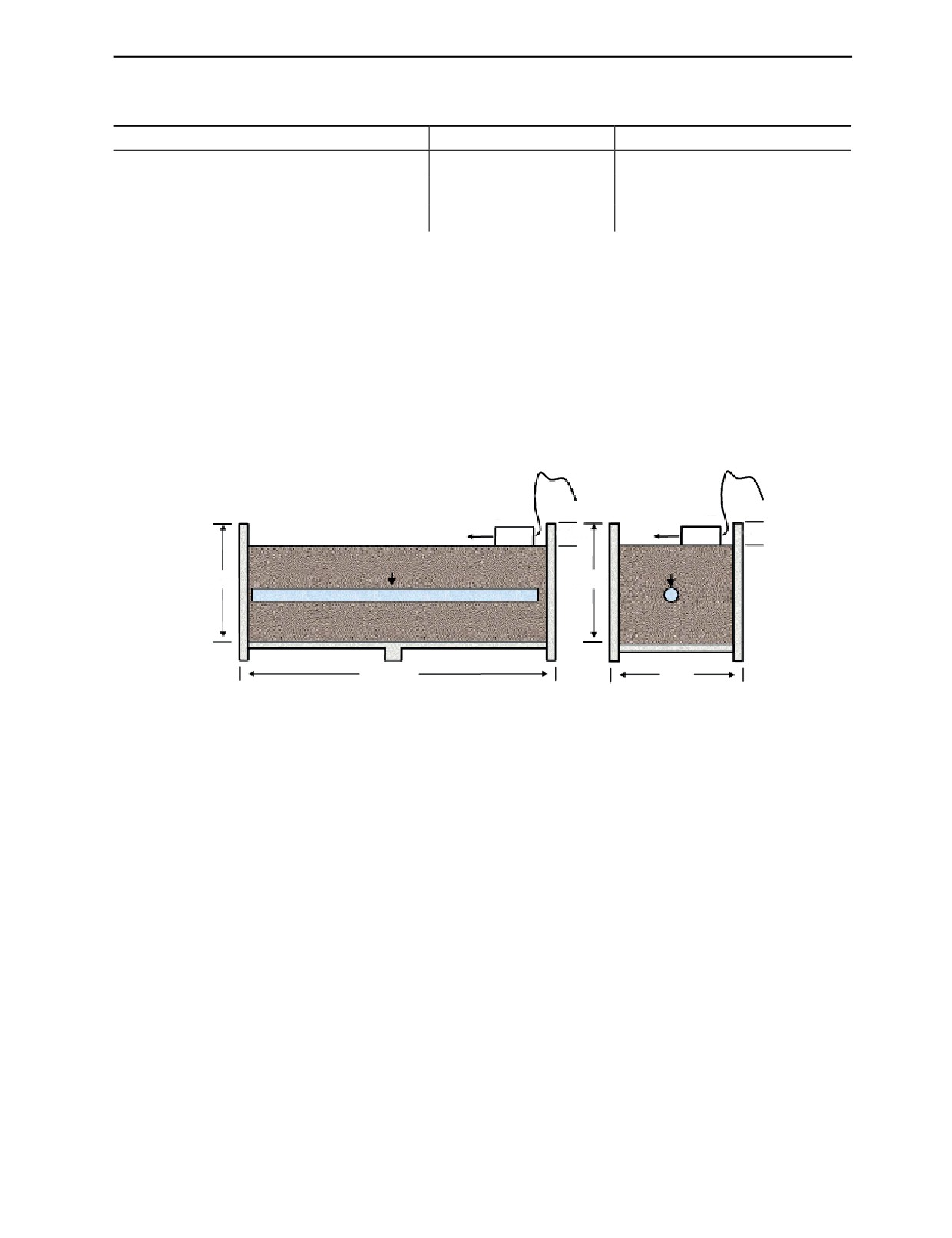
2.2. Выбор направления ориентации антенны
При измерениях направление трубы было параллельно длинной оси резервуара. Расположение
выбирается так, чтобы расположить в трех направлениях параллельно трубе (продольная линия) и
перпендикулярно трубе (боковая линия). Для обнаружения трубы антенна проводится по поверх-
ности песка.
а
б
Антенна
Антенна
10 см
10 см
Сухой песок Трубопровод
Трубопровод
50 см
50 см
80 см
40 см
Рис. 4. Различные направления: продольное направление (а); поперечное направление (б).
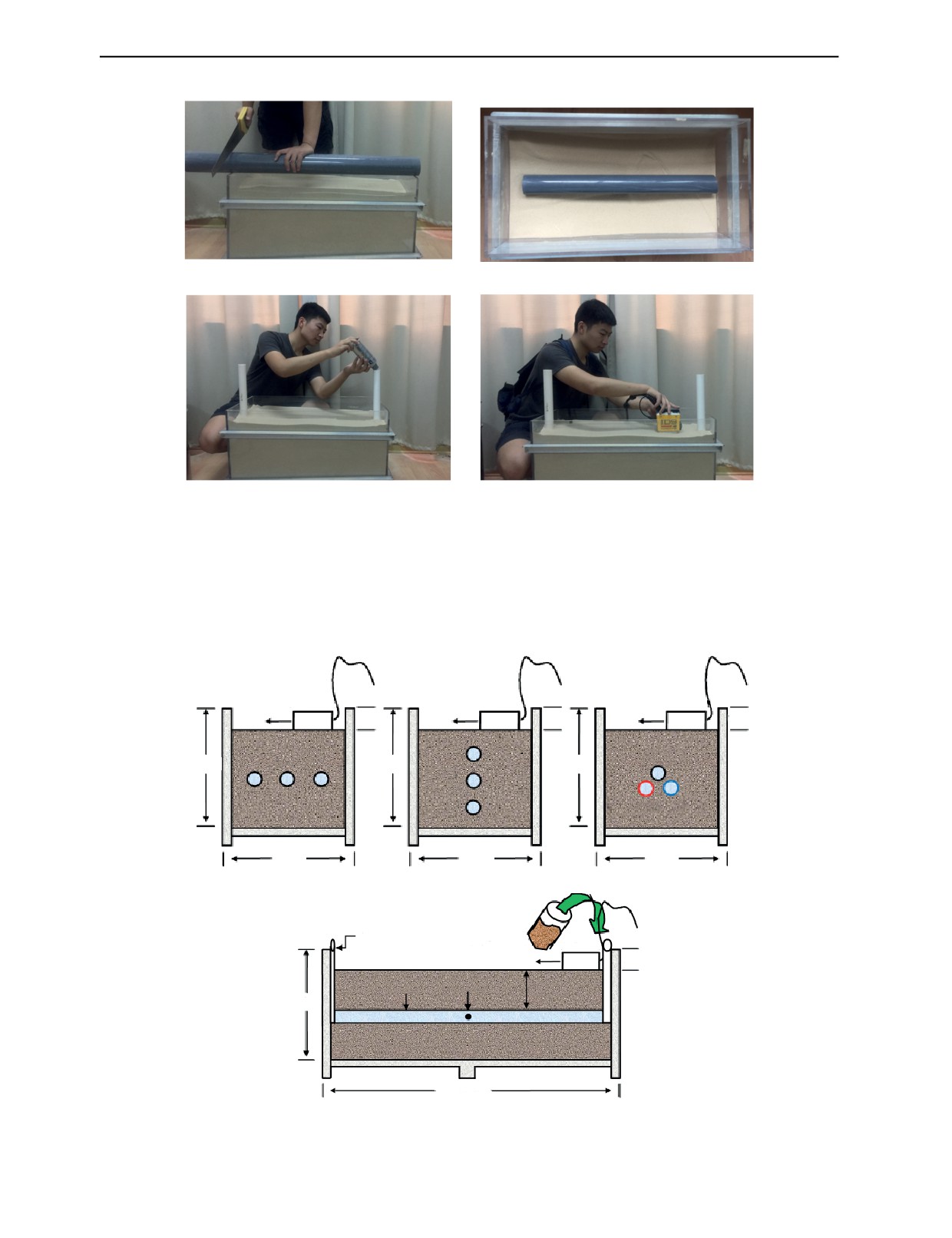
2.3. Процедура эксперимента
Процедура проведена при четырех различных условиях эксплуатации, которые различаются
радиолокационными характерными сигналами трубопроводов, различной глубиной, различны-
ми материалами и изменением утечек нефтяного загрязнения из трубопроводов. Схема процеду-
ры испытаний приведена на рис. 5.
1. Песок заполнял модельный резервуар до уровня в 20 см, затем с интервалом 5 см уклады-
вались параллельно три ПВХ-трубы, после песок засыпался в резервуар с высоты 40 см. Радар
используется для обнаружения и сбора информации вдоль заранее определенного направления.
Вышеуказанная процедура повторялась, интервал между тремя трубами устанавливался на 6, 7,
8, 9 и 10 см соответственно. Всего было проведено 5 испытаний.
2. ПВХ-труба помещается в модельный резервуар, когда тот заполнен до высоты 10 см, затем
песок заполняется до высоты 40 см. Радар используется для обнаружения и сбора информации
вдоль заранее определенного направления. Вышеуказанная процедура повторялась, труба ПВХ
помещалась в модельный резервуар, когда тот заполнялся до высоты 20 и 30 см. Всего было про-
ведено 3 испытания.
3. Трубу из ПВХ помещается в модельный резервуар, когда тот заполнен до высоты 20 см, за-
тем песок наполняют до высоты 40 см. Радар используется для обнаружения и сбора информации
вдоль заранее определенного направления. Вышеуказанная процедура повторялась, ПЭ и чугунная
труба помещаются в модельный резервуар по отдельности, когда тот заполнен до высоты 20 см.
Всего было проведено 3 испытания.
Дефектоскопия
№ 5
2020
38
Лэй Гао, Хантао Сон, Ханлонг Лю и др.
а
б
в
г
Рис. 5. Схема эксперимента: отрезание трубы (а); погружение трубы (б); добавление масла (в); процедура измерений и
обнаружение трубы (г).
4. Песок заполняется до высоты 20 см в модельном резервуаре, в ПВХ-трубе просверли-
вается отверстие в центре. Пластиковые шланги подсоединяются к обоим концам ПВХ-трубы,
и труба помещается в резервуар. Затем песок заполняется до высоты 40 см, машинное масло
заливается в ПВХ-трубу по пластиковому шлангу для имитации процесса утечки масла. Радар
используется для обнаружения и сбора информации вдоль заранее определенного направления.
а
б
в
Антенна
Антенна
Антенна
10 см
10 см
10 см
ПВХ
50 см
ПВХ
50 см
50 см
ПВХ
Чугун ПЭ
40 см
40 см
40 см
г
Пластмассовый
Машинное
рукав
масло
Антенна
10 см
ПВХ Отверстие
20 см
50 см
Сухой песок
80 см
Рис. 6. Процесс модельного испытания: испытания для труб с различным шагом (a); испытания для труб на разных
глубинах (б); испытания для труб из разного материала (в); испытания по утечке масла из труб (г).
Дефектоскопия
№ 5
2020
Модельное исследование по контролю утечек нефти из подземных трубопроводов...
39
Вышеуказанная процедура повторялась для исследования изменения сигналов радара для нефти
вокруг трубопровода.
5. После сбора информации исходное изображение обрабатывается и анализируется с исполь-
зованием программного обеспечения для обработки сигналов GRED HD.
Все оси труб параллельны длинной стороне модельного резервуара, при этом оси труб всегда
расположены горизонтально в центре широкой стороны модельного резервуара. Процесс модель-
ного испытания показан на рис. 6.
3. РЕЗУЛЬТАТЫ
3.1. Механизм контроля
Взяв в качестве примера данные второй горизонтальной линии ПВХ-трубы с глубиной 10 см в
эксплуатационных условиях (2), показаны последовательность операций и результат с использова-
нием GRED HD при первичной обработке сигналов радара. В этом испытании используется радар
с частотой антенны 1600 МГц, интервал величиной 12 нс и точкой выборки 512. Исходное радио-
локационное изображение показано на рис.7.
1,0
2,0
Прямая волна
Размытый сигнал
3,0
0,00
0,10
0,20
0,30
0,40
Расстояние, м
Рис. 7. Исходное радиолокационное изображение.
По рисунку видно, что есть интенсивная прямая волна около 1,2 нс. Прямая волна — сигнал
сильного отражения, вызванный распространяющейся в воздухе электромагнитной волной. Он со-
стоит из двух частей: электромагнитная волна напрямую передается от передающей антенны к
приемной антенне, и электромагнитная волна отражается от поверхности среды. Данные о форме
волны ниже прямой волны плохо определены. Когда время составляет 3,0 нс, данные о форме вол-
ны практически не видны, границу раздела между грунтом и трубопроводом невозможно разли-
чить. Следовательно, необходимо проводить обработку данных радиолокационного сигнала, вклю-
чая удаление прямых волн и фона, полосовую фильтрацию, усиление сигнала и т.п., также можно
выполнять более глубокую интерпретацию радиолокационного изображения для идентификации и
оценки состояния подземного трубопровода.
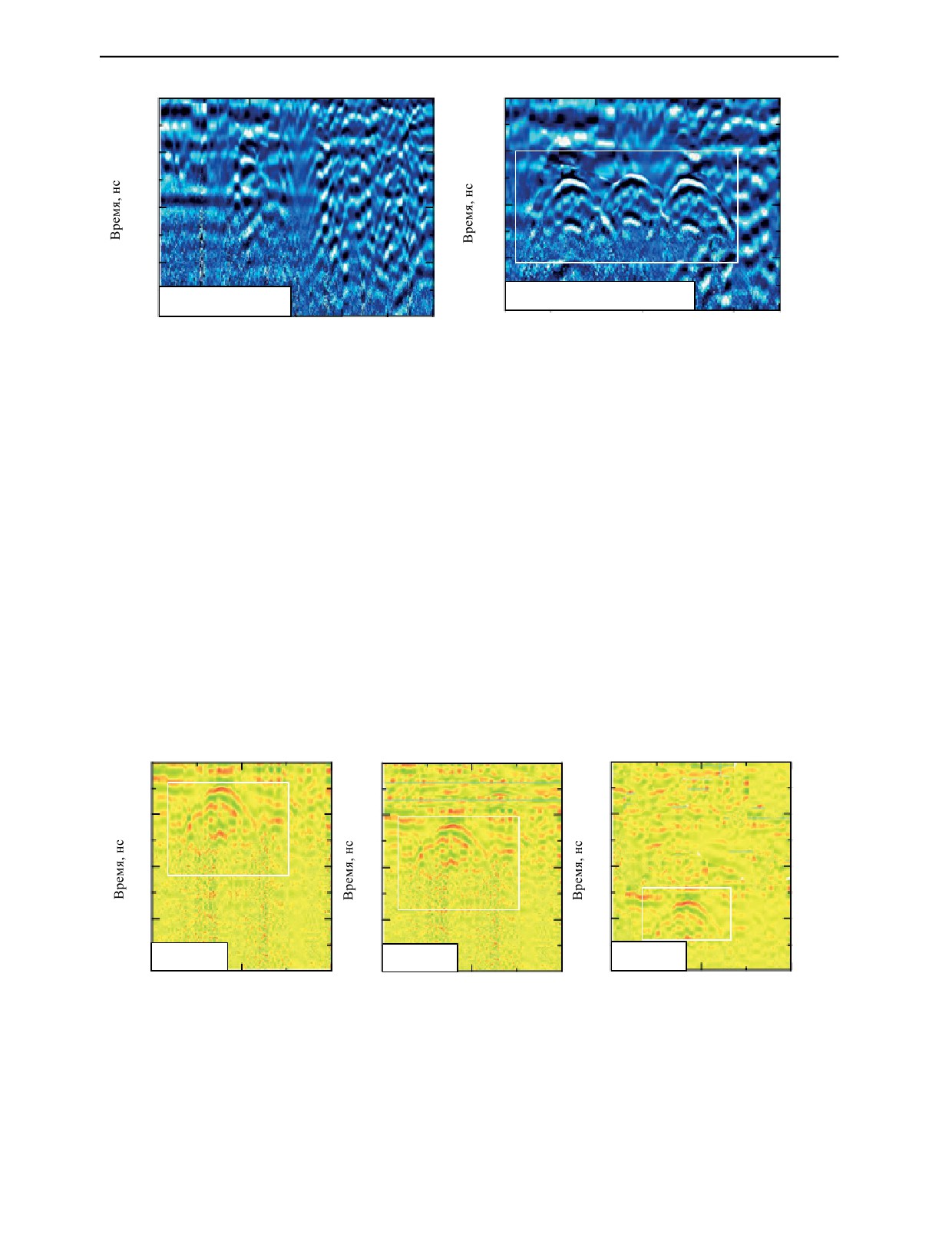
3.2. Влияние расстояния между трубопроводов на сигнал радара
Профиль радиолокационного сигнала труб с разным шагом показан на рис. 8. Гиперболические
особенности трубопровода на рис. 8а практически не различаются. Поскольку расстояние между
трубами слишком мало, отраженные электрoмагнитные волны интерферируют друг c другом, в
результате чего изображение не получается, а сигнал становится более хаотическим. Типичный
синфазный сигнал подземного трубопровода можно увидеть на рис. 8б, когда трубы находятся
на расстоянии 7 см. Согласно соответствующему расстоянию между тремя точками перегиба на
профиле, расстояние между трубопроводами может быть примерно равно примерно 8 см, и три
трубопровода могут быть четко различимы.
Испытание показывает, что наземный радиолокатор может обнаруживать малоразмерные тру-
бы. Горизонтальное разрешение трубопровода для антенны 1600 МГц должно быть около 8 см.
Дефектоскопия
№ 5
2020
40
Лэй Гао, Хантао Сон, Ханлонг Лю и др.
а
б
1,0
1,0
2,0
2,0
3,0
3,0
Гиперболическая ось
Разупорядоченный
синфазности
сигнал
0,00
0,20
0,30
0,40
0,00
0,20
0,30
0,40
Расстояние, м
Расстояние, м
Рис. 8. Радиолокационное изображение расположенных на расстоянии друг от друга труб: сигнал от труб на расстоянии
5 см друг от друга (а); сигнал от труб на расстоянии 8 см друг от друга (б).
3.3. Влияние глубины залегания трубопроводов на сигнал радара
Вид поперечного сечения радиолокационного сигнала для труб на различных глубинах показан
на рис. 9. Электромагнитные волны отражаются на границе раздела сред, а изменения формируют-
ся в одноканальной волне. Амплитуда прямой волны велика, поэтому сильно затухает после входа
в землю. Значение временной координаты на границе соответствует радиолокационному изобра-
жению. В поперечном сечении электромагнитные волны будут изменяться, когда они проходят че-
рез верхнюю поверхность трубы. Следовательно, вертикальная глубина нахождения трубы может
быть определена в зависимости от времени и скорости распространения электромагнитной волны
в области трубы.
На рис. 9 горизонтальные сигналы электромагнитной волны, проходящей через трубопровод,
от верхней и нижней поверхностей составляют 0,5 и 2,1 нс соответственно. Время пробега волны
в одном направлении равно половине разницы значений в 1,3 нс. Скорость краевой волны состав-
ляет 7,48 см/нс. Вертикальная глубина залегания трубы составляет 9,72 см, что близко к реальной
глубине залегания в 10 см. Аналогично, на рис. 9б вертикальная глубина составляет 15,71 см, а на
рис. 9в — 24,68 см.
а
б
в
1,0
1,0
1,0
2,0
2,0
2,0
3,0
3,0
3,0
t = 1,3 нс
t = 2,1 нс
t = 3,3 нс
0,00
0,20
0,30
0,00
0,20
0,30
0,00
0,20
0,30
Расстояние, м
Расстояние, м
Расстояние, м
Рис. 9. Изображение сигнала радара на различных глубинах залеганиях трубопроводов: залегание 10 см (а); залегание
20 см (б); залегание 30 см (в).
Судя по изображению радиолокационного профиля, расстояние между трубопроводами вдоль
вертикали составляет около 7,5 см, что соответствует реальному расстоянию между ними. Резуль-
таты обнаружения относительно точны на относительном расстоянии, но абсолютная глубина от-
личается от реальной ситуации. Вертикальное разрешение радара недостаточно высокое, исходное
Дефектоскопия
№ 5
2020
Модельное исследование по контролю утечек нефти из подземных трубопроводов...
41
изображение слегка изменило сигнал в процессе предварительной обработки, такой как обработка
прямой волной. Таким образом, требуется многократно протестировать методику, чтобы получить
точную глубину в реальных ситуациях.
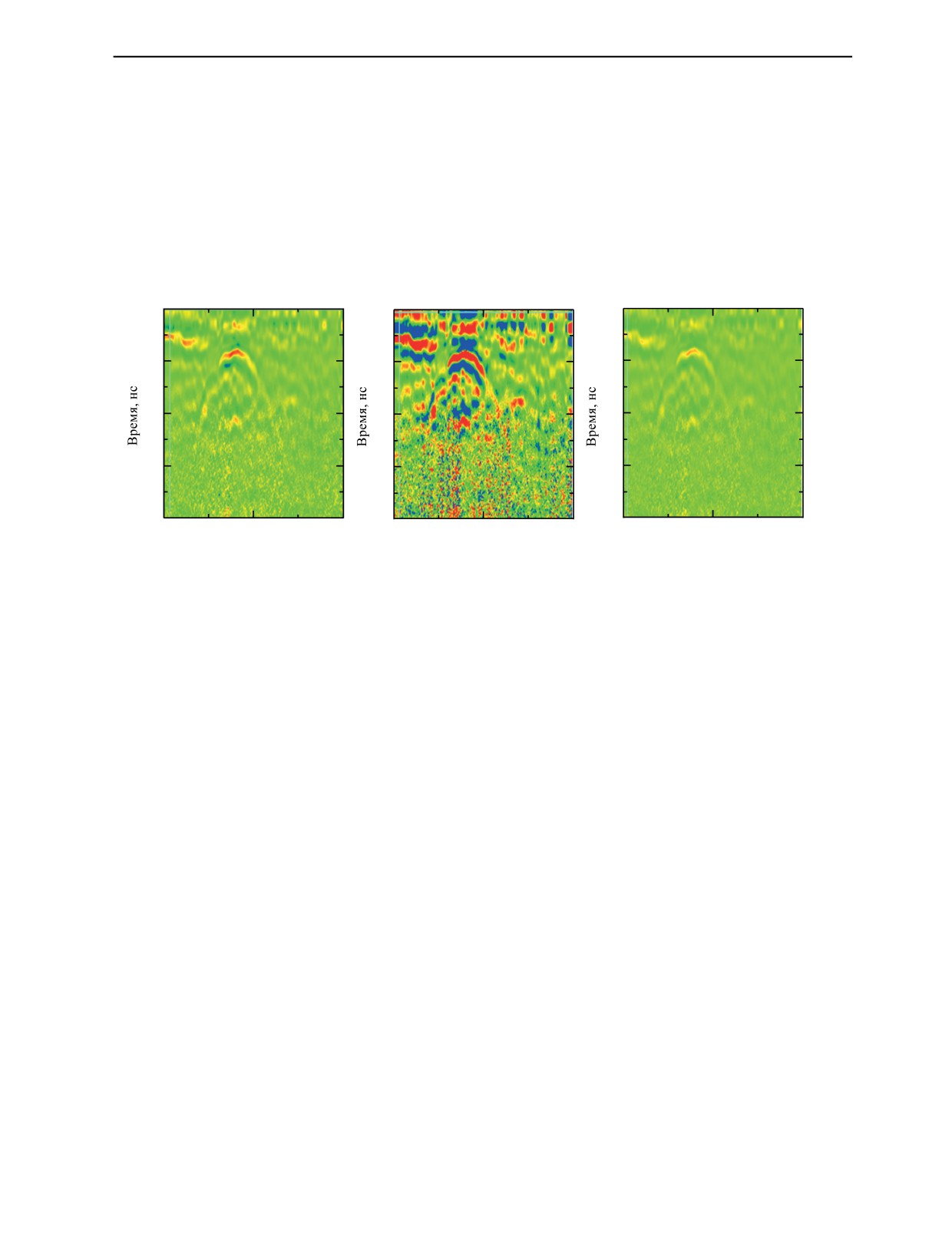
3.4. Влияние материала трубопроводов на сигнал радара
Профиль радиолокационного сигнала труб для различных материалов показан на рис. 10.
Сравнивая рис. 10 а, б и в, можно обнаружить, что чугунная труба имеет более явную гипер-
болическую ось синфазности, чем трубы из ПВХ и ПЭ одинакового диаметра, амплитуда сигна-
ла велика, множественные волны очевидны, изображения труб из ПВХ и ПЭ выглядят обычно.
а
б
в
1,0
1,0
1,0
2,0
2,0
2,0
3,0
3,0
3,0
0,00
0,20
0,30
0,00
0,20
0,30
0,00
0,20
0,30
Расстояние, м
Расстояние, м
Расстояние, м
Рис. 10. Изображение сигнала радара для различных материалов трубопроводов: ПВХ-труба (а); чугунная труба (б);
ПЭ-труба (в).
Результаты эксперимента показывают, что интенсивность сигнала радиолокационного изображе-
ния имеет небольшую связь с разностью значений диэлектрической проницаемости между отра-
жателем волны (объектом поиска) и средой, в которой волна распространяется. Диэлектрическая
проницаемость меньше, амплитуда сигнала больше, а характеристики сигнала более очевидны.
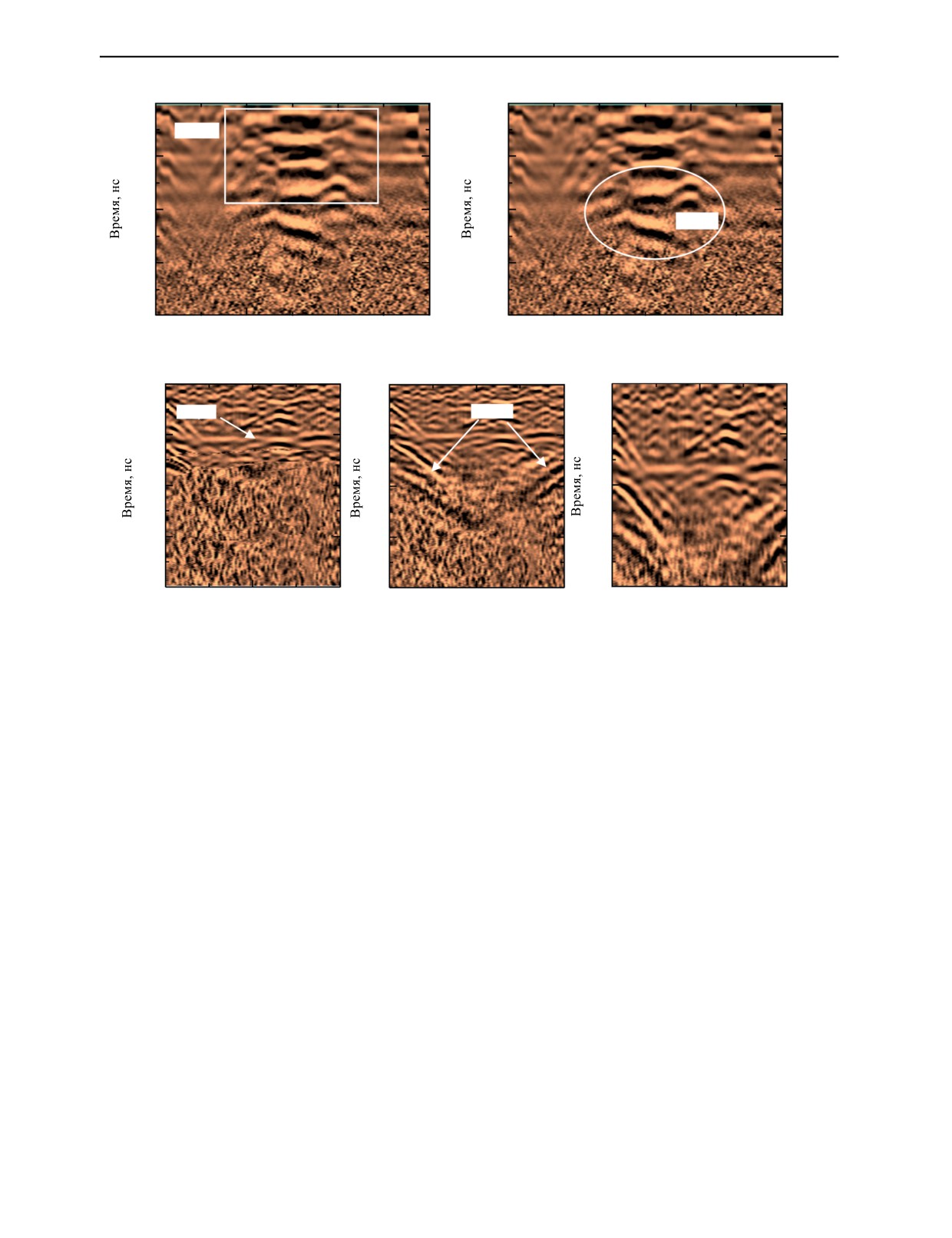
3.5. Влияние утечки нефти на сигнал радара
Сигнал радара песка (рис. 11а) и сигнал радара после закачки масла в течение 20 мин (рис. 11б)
определяются по отдельности. Нефть просачивается в песок и распространяется вниз и наружу.
Диэлектрические свойства песка в модельном резервуаре изменяются, интенсивный дифракцион-
ный сигнал может генерироваться в радиолокационном профиле. Согласно данным, жидкая мас-
ляная среда имеет относительно большую относительную диэлектрическую проницаемость, она
эквивалентна высокочастотному фильтру в процессе передачи электромагнитной волны, низкоча-
стотный сигнал с большой длиной волны находится в нижней части, у него меньше эффективных
сигналов. Результаты показывают, что наземный радиолокатор может обнаружить изменения при
утечки жидких сред, таких как нефть, вокруг трубопровода.
Как показано на рис. 11 в—д, после утечки масла на профиле радара сигнал изменяется в на-
правлении растекания масла и перпендикулярно направлению растекания масла на продольной ли-
нии, волна верхнего отражения задерживается, нижнее отражение находится в нижней части зоны
загрязнения масла. Волна имеет явление суперпозиции, нет очевидного сигнала точки перегиба
фазы в начальном положении волны нефтяного дна, потому не может быть определена конкретная
площадь растекания нефти по изображению.
4. ЗАКЛЮЧЕНИЕ
Существует несколько приложений для обнаружения утечек нефти в подземных трубопрово-
дах, основанных на принципе георадиолокации, проведены лабораторные модельные испытания
подземных трубопроводов и утечек из нефтепроводов, качественно проанализированы радиолока-
ционные сигналы. Сделаны следующие выводы.
Дефектоскопия
№ 5
2020
42
Лэй Гао, Хантао Сон, Ханлонг Лю и др.
а
б
Труба
1,0
1,0
2,0
2,0
Масло
3,0
3,0
0,00
0,20
0,30
0,40
0,00
0,20
0,30
0,40
Расстояние, м
Расстояние, м
в
г
д
Труба
Масло
1,0
1,0
1,0
2,0
2,0
2,0
3,0
3,0
3,0
0,00
0,20
0,30
0,00
0,20
0,30
0,00
0,20
0,30
Расстояние, м
Расстояние, м
Расстояние, м
Рис.11. Изображение сигнала от трубы и утечки масла: поперечный сигнал при введении масла (a); поперечный сигнал
через 20 мин после введения масла (б); продольный сигнал при введении масла (в); продольный сигнал через 20 мин
после введения масла (г); частичное уширение продольного сигнала от утечки масла (д).
1. На этапе предварительной обработки эффективно устранить помехи и снизить шум исходно-
го изображения могут полосовая фильтрация, перенаправление волны, удаление фона и т.д. Усиле-
ние сигнала может значительно повысить характерный сигнал контролируемой области, что облег-
чает обнаружение трубопровода под землей. Это также усиливает недопустимый сигнал в опреде-
ленной степени, что не способствует количественному анализу сигнала контролируемой области.
2. Различные размеры труб, отражающих электромагнитные волны под разными углами, вы-
зывают различия в сигналах. Чем больше диаметр трубы, тем больше радиус кривизны гиперболы
на изображении. Чем больше длина на обоих концах, тем сигнал более четкий. В то же время под-
тверждается, что диаметр трубы и вертикальная глубина залегания пропорциональны горизонталь-
ной длине и вертикальной длине сигнала сильного отражения соответственно.
3. Антенна радара RIS, работающая на частоте 1600 МГц, имеет вертикальное разрешение по
глубине 5 см для поиска двух подземных трубопроводов, ошибка определения глубины залегания
трубопровода составляет около 25 %, горизонтальное направление, когда расстояние между трубо-
проводами превышает 8 см, может эффективно отображать особенности трубопровода, разреше-
ние по горизонтали не менее 8 см.
4. Когда труба заполнена маслом, жидкая среда имеет высокую диэлектрическую проницае-
мость, гиперболическая поверхность трубы больше не является понятной. Интенсивный сигнал
исходит от области с нефтью, он имеет гиперболический профиль и больше не показывает четкую
ось синфазности. Характерным сигналом трубопровода, заполненного нефтью, является сигнал
в форме полумесяца с раскрытием, обращенным вниз, если отражающая площадь трубопровода
уменьшается, поглощение электромагнитных волн становится сильнее.
5. Утечка масла изменяет диэлектрические свойства песка в модельном резервуаре во время
процесса диффузии в слой почвы, могут генерироваться интенсивные дифракционные сигналы в
Дефектоскопия
№ 5
2020
Модельное исследование по контролю утечек нефти из подземных трубопроводов...
43
профиле радиолокационного сигнала, что в некоторой степени фильтрует эффективный сигнал. В
результате наличия преграды процесс распространения и диффузии нефти может быть успешно
обнаружен на радиолокационном профиле, но существующие результаты показывают, что количе-
ственно определить площадь нефти достаточно трудно.
Финансовая поддержка предоставляется Национальным фондом естественных наук Китая
(грант № 51508159), фондами фундаментальных исследований для центральных университетов
университета Хохай (№ 2019B12914), ключевой лабораторией Министерства образования по гео-
механике и проектированию насыпей, университет Хохая (№ GHXN201904) с благодарностью.
СПИСОК ЛИТЕРАТУРЫ
1. Shirokov V.S. Soil and traffic loads on underground pipelines // Soil Mechanics and Foundation
Engineering. 2018. V. 55. P. 115—119.
2. Shin S., Lee G., Ahmed U., Lee Y., Na J., Han C. Risk-based underground pipeline safety management
considering corrosion effect // Journal of Hazardous Materials. 2018. V. 342. P. 279—289.
3. Shou K.J., Chen B.C. Numerical analysis of the mechanical behaviors of pressurized underground
pipelines rehabilitated by cured-in-place-pipe method // Tunnelling and Underground Space Technology. 2018.
V. 71. P. 544—554.
4. Li W., Han Y., Liu Y., Zhu C.R., Ren Y.B., Wang Y.J., Chen G. Real-time location-based rendering of urban
underground pipelines // International Journal of Geo-Information. 2018. V. 7 (1). P. 32.
5. Rashidov T.R., An E.V. Geometrically nonlinear buckling stability analysis of axially loaded underground
pipelines // Soil Mechanics and Foundation Engineering. 2017. V. 54. P. 76—80.
6. Duru C., Ani C. A statistical analysis on the leak detection performance of underground and overground
pipelines with wireless sensor networks through the maximum likelihood ratio test // Sadhana-Academy
Proceedings in Engineering Sciences. 2017. V. 42. P. 1889—1899.
7. Bors A.M., Butoi N., Caramitu A.R., Marinescu V., Lingvay I. The thermooxidation and resistance to
moulds action of some polyethylene sorts used at anticorrosive insulation of the underground pipelines //
Materiale Plastice. 2017. V. 54. P. 447—452.
8. Amaya-Gomez R., Ramirez-Camacho J.G., Pastor E., Casal J., Munoz F. Crater formation by the rupture
of underground natural gas pipelines: A probabilistic-based model // Journal of Natural Gas Science and
Engineering. 2018. V. 54. P. 224—239.
9. Gadala I.M., Wahab M.A., Alfantazi A. Electrochemical corrosion finite element analysis and burst
pressure prediction of externally corroded underground gas transmission pipelines // Journal of Pressure Vessel
Technology-Transactions of The ASME. 2018. V. 140.
10. Gunduz M., Naser A.F. Cost based value stream mapping as a sustainable construction tool for
undergraound pipeline construction projects // Sustainability. 2017. V. 9.
11. Kim H.M., Park G.S. A New Sensitive Excitation Technique in Nondestructive Inspection for
Underground Pipelines by Using Differential Coils // IEEE Transactions on Magnetics. 2017. V. 53.
12. Dzhala R.M., Verbenets B.Y., Mel’nyk M.I., Mytsyk A.B., Savula R.S., Semenyuk O.M. New methods for
the corrosion monitoring of underground pipelines according to the measurements of currents and potentials //
Materials Science. 2017. V. 52. P. 732—741.
13. Israilov M.S., Mardonov B., Rashidov T.R. Seismodynamics of an underground pipeline in nonideal
contact with soil: Effect of sliding on dynamic stresses // Journal of Applied Mechanics and Technical Physics.
2016. V. 57. P. 1126—1132.
14. Dimov L.A., Dimov I.L. New way of determining soil resistance to underground pipeline deformation //
Soil Mechanics and Foundation Engineering. 2016. V. 53. P. 312—316.
15. Sahraoui Y., Chateauneuf A. The effects of spatial variability of the aggressiveness of soil on system
reliability of corroding underground pipelines // International Journal of Pressure Vessels and Piping. 2016.
V. 146. P. 188—197.
16. Ha H.M., Alfantazi A. On the role of water, temperature, and glass transition in the corrosion protection
behavior of epoxy coatings for underground pipelines // Journal of Coatings Technology and Research. 2015.
V. 12. P. 1095—1110.
17. Khan L.R., Tee K.F. Quantification and comparison of carbon emissions for flexible underground
pipelines // Canadian Journal of Civil Engineering. 2015. V. 42. P. 728—736.
18. Matvienko A.F., Korzunin G.S., Loskutov V.E., Babkin S.A. The quality control of underground gas
pipelines via the electromagnetic and acoustic method // Russian Journal of Nondestructive Testing. 2015.
V. 51. P. 546—553.
19. Guo Z.Y., Liu D.J., Pan Q., Zhang Y.Y., Li Y., Wang Z. Vertical magnetic field and its analytic signal
applicability in oil field underground pipeline detection // Journal of Geophysics and Engineering. 2015. V. 12.
P. 340—350.
20. Klesk P., Kapruziak M., Olech B. Statistical moments calculated via integral images in application to
landmine detection // Pattern Analysis and Applications. 2018. V. 21. P. 671—684.
Дефектоскопия
№ 5
2020
44
Лэй Гао, Хантао Сон, Ханлонг Лю и др.
21. Sun H., Pashoutani S., Zhu J. Nondestructive evaluation of concrete bridge decks with automated
acoustic scanning system and ground penetrating radar // Sensors. 2018. V. 18.
22. Dinh K., Gucunski N., Duong T.H. An algorithm for automatic localization and detection of rebars from
GPR data of concrete bridge decks // Automation in Construction. 2018. V. 89. P. 292—298.
23. Dinh K., Gucunski N., Kim J. Method for attenuation assessment of GPR data from concrete bridge
decks // NDT & E International. 2017. V. 92. P. 50—58.
24. Dinh K., Gucunski N., Kim J. Understanding depth-amplitude effects in assessment of GPR data from
concrete bridge decks // NDT & E International. 2016. V. 83. P. 45—58.
25. Gucunski N., Pailes B., Kim J. Capture and Quantification of Deterioration Progression in Concrete
Bridge Decks through Periodical NDE Surveys // Journal of Infrastructure Systems. 2017. V. 23.
26. Romero F.A., Barnes C.L., Azari H. Validation of benefits of automated depth correction method:
improving accuracy of ground-penetrating radar deck deterioration maps // Transportation Research Board.
2015. V. 1.
27. Ukaegbu I.K., Gamage K.A.A. Ground penetrating radar as a contextual sensor for multi-sensor
radiological characterization // Sensors. 2017. V. 17.
Дефектоскопия
№ 5
2020