УДК 620.179.16
УЛУЧШЕНИЕ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ УЛЬТРАЗВУКОВЫХ
СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ АЛГОРИТМОВ РАЗРЕЖЕННОЙ
ДЕКОНВОЛЮЦИИ И ДЕКОМПОЗИЦИИ НА ЭМПИРИЧЕСКИЕ МОДЫ
© 2020 г. Бенаммар Абдессалем 1,*, Чибане Фарид1,2
1 Научно-исследовательский центр промышленных технологий ЦНТИ, п/я 64, Шерага 16014, Алжир,
2 Университет Бумердес, Алжир
E-mail: *Abs_benammar@yahoo.fr; a.benammar@crti.dz
Поступила в редакцию 23.11.2019; после доработки 13.12.2019
Принята к публикации 17.04.2020
За последние несколько лет стремительно возросло использование ультразвуковых решеток в неразрушающем кон-
троле, что привело к использованию новых алгоритмом для обработки сигналов. Основной целью данной статьи явля-
ются улучшение разрешающей способности контроля дефектов и разработка процедуры контроля настолько быстрой и
точной, насколько это возможно. Статья представляет новый метод для улучшения разрешающую способность ультра-
звуковых фазированных решеток (ФР). Предложенный метод основан на вариационной декомпозиции сигналов и на
методе деконволюции. Чтобы снизить уровень шума сигналов используется метод, основанный на декомпозиции на
вариационные моды (ДВМ), а для улучшения разрешающей способности — оптимизированный алгоритм разреженной
деконволюции с применением метода мажоризации—минимизации. Модельное исследование проводили на образце из
нержавеющей стали, который содержал несколько дефектов. Полученные результаты показывают, что предложенный ме-
тод может улучшить качество данных ультразвукового контроля, что, в свою очередь, улучшает локализацию дефектов.
Ключевые слова: ультразвуковая фазированная решетка, декомпозиция на эмпирические моды, декомпозиция на ва-
риационные моды, разреженная деконволюция, ММ-алгоритм.
DOI: 10.31857/S0130308220060020
1. ВВЕДЕНИЕ
В течение последних нескольких лет ультразвуковой контроль (УЗК) с помощью ФР проис-
ходит в автоматическом режиме, и процедура контроля может выполняться множество раз без не-
обходимости перенастройки оборудования, которое охватывает большую площадь контроля [1].
ФР имеют множество преимуществ над совмещенными преобразователями с точки зрения чув-
ствительности и процедуры контроля [2]. Несмотря на все эти плюсы, изображения, полученные с
помощью оборудования на ФР, имеют низкое разрешение, что предполагает использование новых
алгоритмов для улучшения качества изображений [2—4]. Часто при ультразвуковом контроле с
фазированными решетками (УЗКФР) дефектоскописты используют изображения B-скана, которые
состоят из нескольких просуммированных A-сканов. В наши дни разрешение А-сканов может быть
значительно улучшено с использованием алгоритмов и методик обработки сигналов, что является
целью множества исследований в течение последних десяти лет [1, 4, 5].
Получаемые А-сканы содержат полезную информацию, включая амплитуду и временные за-
держки, которые могут использоваться для количественной оценки размера и глубины дефектов
[6]. Тем не менее процедура УЗК некоторых материалов, таких как нержавеющая сталь, ухудшает-
ся из-за ее крупной зеренной структуры, наличие которой приводит к повышенному поглощению
и рассеянию. Контроль дефектов в таких материалах затруднителен при анализе амплитудно-вре-
менной зависимости, поскольку на амплитуду эха от дефектов влияют такие факторы, как размер
зерна и частота возбуждаемой УЗ-волны. Чтобы провести качественный контроль дефектов реко-
мендуется проводить предварительную обработку для повышения качества сигналов. Во многих
методах предполагается улучшение отношения сигнал/шум (ОСШ).
Широко используется метод адаптивного разделения спектра (АРС) [7]. Как альтернатива АРС,
такие методы частотно-временного анализа, как оконное преобразование Фурье (ОПФ), вейвлет-
преобразование (ВП) и S-преобразование, предложены для оценки сигналов в объединенном ча-
стотно-временном анализе [8—10]. Основа этих частотно-временных методов анализа состоит в
том, чтобы извлечь разнесенную по частоте важную информацию, которая может использоваться
для распознавания помех и эхосигналов от дефектов в приложениях УЗК. Однако очень важной
задачей является получение основы преобразования общего вида, которое адаптируется к нестаци-
онарным и интерферирующим узкополосным, широкополосным и дисперсионным эхосигналам,
искаженным шумами [11].
Улучшение разрешающей способности ультразвуковых сигналов...
15
Кроме классических методов на основе частотно-временных зависимостей, для анализа сиг-
налов использовалась методика декомпозиции на эмпирические моды (ДЭМ), предложенная
Huang et al. [11, 12]. Принцип этого алгоритма заключается в том, что анализируются нелиней-
ные и нестационарные сигналы. Данный алгоритм может разложить любой сигнал на колебатель-
ные компоненты, называемыми эмпирическими модами (ЭМ). В некоторых случаях разложение
сильно зависит от методов поиска экстремума, интерполяция точек экстремумов в огибающую,
критерия остановки. Отсутствие математической теории и степеней свободы, снижающие устой-
чивость алгоритма ЭМД, привели к теоретическому развитию и улучшению устойчивости раз-
ложения. В некоторых экспериментах было показано, что ЭМД имеет важные сходства с вейвле-
тами и банками фильтров [13].
Недавно Dragomiretskiy и Zosso [14] предложили новый нерекурсивный алгоритм ВМД. В от-
личие от ЭМД, эта модель способна точно разделить любую пару гармоник, в основном, незави-
симо от их относительных амплитуд и от того, насколько близки их частоты. Таким образом, ВМД
подходит для устранения шума в нелинейных и нестационарных сигналах [14].
В качестве альтернативы методам декомпозиции и их способности улучшать качество сигнала
в области неразрушающего контроля (НК) разреженная деконволюция широко используется для
улучшения разрешения по времени. Деконволюция — это численный процесс, целью которого
является компенсация физических ограничений измерительного прибора. Это старая проблема,
которая была предметом многих исследований. Несмотря на это, она все еще широко изучается
сегодня, поскольку задача не допускает единственного решения [15]. Целью различных методов
деконволюции является создание решения, которое является физически приемлемым и численно
устойчивым. Если цель всех методов схожа, используемые теоретические концепции и разработан-
ные алгоритмы чрезвычайно разнообразны. Не существует универсального метода деконволюции,
который превосходил бы все остальные. Трудно сравнить результаты работы различных методов
деконволюции, потому что явные или неявные предположения, характерные для каждого алгорит-
ма, делают оценки лучше для одних классов сигналов и менее хорошо для других. Для решения
этих задач был использован ряд алгоритмов, таких как фильтр Винера, процесс Бернулли—Гаусса
[16], согласованное преследование (СП) [17] и другие.
Во многих практических приложениях неразрушающего контроля количество дефектов в кон-
тролируемой части и, как правило, их распределение можно считать разреженным, следовательно,
применялась разреженная деконволюция [3, 18]. Норма L1 в основном используется для миними-
зации функции потерь в разреженной деконволюции. В последнее время автор [19] предлагает эф-
фективный итерационный алгоритм (с точки зрения вычислений) для разреженной деконволюции,
полученный с использованием MM-метода оптимизации.
Эта статья посвящена улучшению разрешения изображений B-сканов и УЗК дефектов метода-
ми разреженной деконволюции и алгоритма ВМД. Остальная часть статьи структурирована сле-
дующим образом: раздел 2 посвящен описанию принципов предлагаемых алгоритмов, таких как
ЭМД, ВМД, разреженная деконволюция и сам предложенный алгоритм; в разделе 3.1 представ-
лены результаты, полученные при применении предложенных алгоритмов на смоделированных
данных; в разделе 3.2 представлены экспериментальные результаты на образце из нержавеющей
стали; наконец, выводы представлены в разделе 4.
2. ПРИНЦИПЫ И МЕТОДЫ
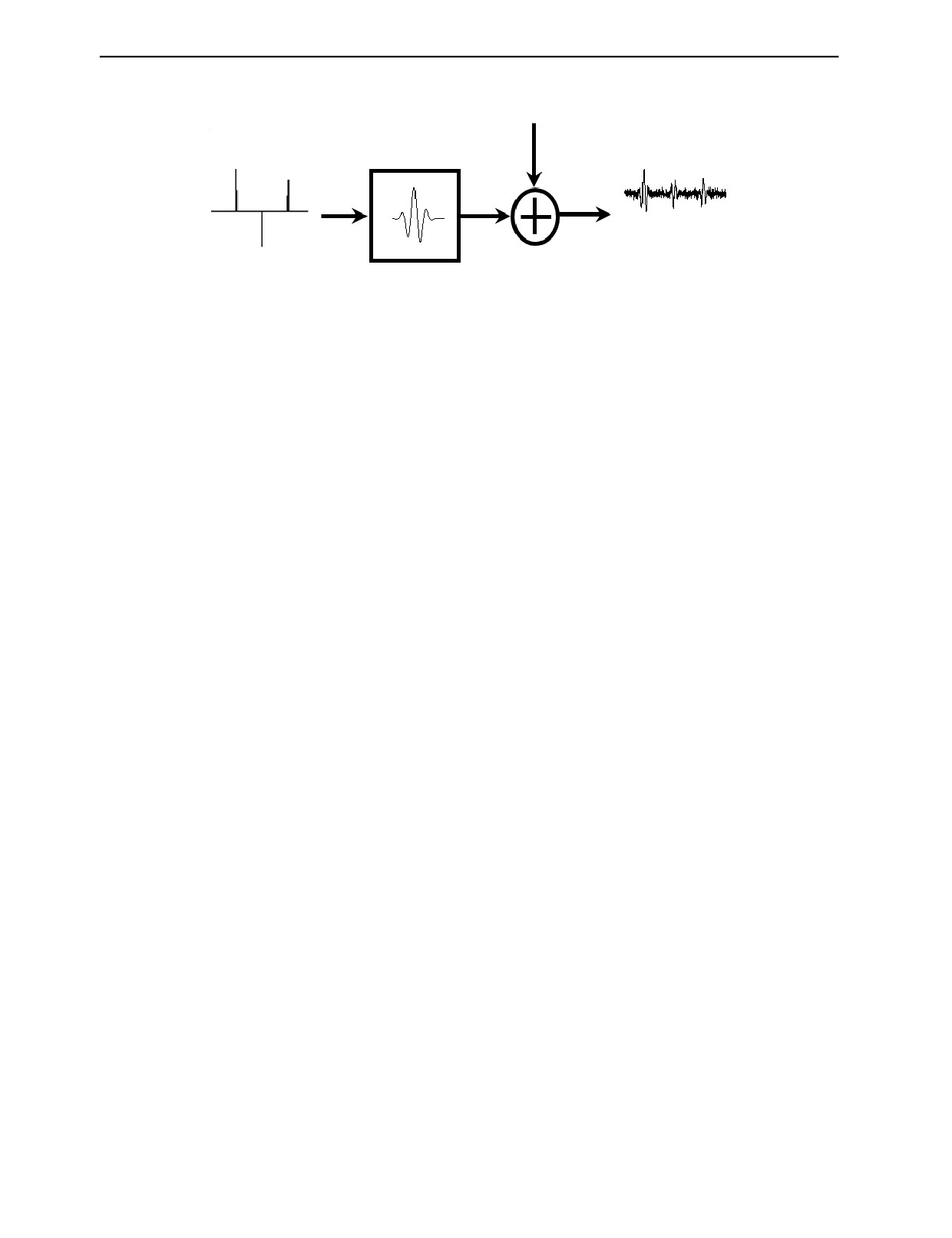
Ультразвуковой сигнал можно рассматривать как выходной параметр линейного фильтра. Об-
щее уравнение, связывающее шум на входе и результат применения линейного фильтра для выход-
ного импульсного сигнала h(t), описывается следующим образом [20]:
y(t) = h(t)⋅r(t) + w(t).
(1)
Конкретный пример для ультразвуковых сигналов (рис. 1): выходной сигнал фильтра y(t)
представляет собой сигнал А-скана, измеренный для данной координаты преобразователя. Вы-
ходной импульсный сигнал системы h(t) представляет собой падающую волну. Она обычно изме-
ряется на плоском отражателе. Входной сигнал системы представляет собой функцию, называе-
мую коэффициентом отражения r(t), которая в основном учитывает параметры, характерные для
материала, но может также дополняться явлением дифракции. Величина w(t) представляет собой
аддитивный шум, подразумевающий под собой не только помехи при измерении, но и ошибки
при моделировании.
Дефектоскопия
№ 6
2020
16
Бенаммар Абдессалем, Чибане Фарид
w(t): шум
r(t): неизвестный
коэффициент отражения
y(t): измеренный
сигнал
h(t): выходной
импульсный сигнал
Рис. 1. Моделирование ультразвукового сигнала.
С физической точки зрения может показаться более естественным рассматривать волну, излу-
чаемую ультразвуковым преобразователем как входной сигнал, а коэффициент отражения от сре-
ды, в которой волна распространяется, в качестве фильтра. Тем не менее, поскольку неизвестная
величина является функцией коэффициента отражения, обычно предпочтительно возвращать ее
к задаче деконволюции, используя коммутативность свертки. Даже когда выходной импульсный
сигнал системы полностью известен, деконволюция является сложной задачей, потому что она от-
носится к классу плохо обусловленных задач.
2.1. Декомпозиция на эмпирические моды
Метод ДЭМ разбивает сигнал на обычно небольшое количество ЭМ [12]:
N
y t)
=
IMF t)+
r t),
(2)
∑
k
k =1
где r(t) — остаток от восстановления сигнала; IMFk(t) — k-я функция ЭМ. Чтобы рассматриваться
в виде ЭМ, сигнал должен удовлетворять двум условиям: (1) число экстремумов (максимумов и
минимумов) и количество пересечений нуля должно быть равным или отличаться не более чем на
единицу; (2) среднее значение верхней и нижней огибающей везде равно нулю.
2.2. Декомпозиция на вариационные моды
Метод ДВМ может разложить любой сигнал y(t) на компоненты k-моды, где требуется, чтобы
каждая мода (подсигналы) uk была в основном компактной вокруг центральной частоты ωk, опреде-
ленной вместе с разложением [14]. В алгоритме ДВМ ЭМ переопределяется как амплитудно-моду-
лированный-частотно-модулированный (AM-ЧM) сигнал
u t)
=A t)cos(ϕ t)),
(3)
k
k
k
где Ak(t) и ωk(t) — мгновенная амплитуда и мгновенная частота функции uk(t), ωk(t)=dφ(t)/dt.
Процесс разложения сигнала осуществляется путем поиска оптимального решения ограничен-
ной вариационной модели. Каждая ЭМ имеет компактный носитель вокруг центральной частоты, и
она фиксируется с помощью ограниченной полосы пропускания вокруг ее характерных централь-
ных частот. Центр частоты и ширина полосы каждого компонента постоянно итеративно обновля-
ются при решении по вариационным модам. Затем в соответствии с характеристиками частотной
области реального сигнала можно выполнить адаптивное разложение полосы сигнала, и мы полу-
чим ряд узкополосных компонентов ЭМ [21]. Оценка ширины полосы моды требует:
1. Вычисление аналитического сигнала, связанного с uk, с помощью преобразования Гильберта
для получения одностороннего спектра частоты.
2. Спектр частоты каждой моды смещается в основную полосу перемножением на экспоненту,
настроенной на соответствующую расчетную центральную частоту.
Дефектоскопия
№ 6
2020
Улучшение разрешающей способности ультразвуковых сигналов...
17
3. Ширина полосы модовой компоненты оценивается через размытие по Гауссу H1 демодулиро-
ванного сигнала; например, квадратичная L2-норма градиента.
Тогда ограниченная вариационная задача для нахождения всех мод, полученных с помощью
описанной выше процедуры, определяется как
2
j
-jω
k
t
min
∂
δ(t)+
*
u t)
(4)
u
,ω
∑
t
k
e
k
k
k
πt
2
при условии
∑
u
k
= y,
k
где y обозначает сигнал для разложения; {uk}:= { u1 , u2 ,….. uk } — k-я мода; {ωk}:= { ω1 , ω2 ,….. ωk } —
центральная частота k-й моды; δ — распределение Дирака; t — время; k — количество мод; * обозна-
чает свертку. Более высокие значения k соответсвуют модам с компонентами более низкой частоты.
2.3. Разреженная деконволюция
Дискретизация ультразвукового сигнала, описанная в уравнении (1), может быть выражена как
y(k) = h(k)*r(k) + w(k),
(5)
где * обозначает свертку.
Здесь мы полагаем, что линейная стационарная система может быть описана рекурсивным раз-
ностным уравнением [6, 19]:
y n)
=∑ b k)r(n-k)
−∑ a k)y(n-k).
(6)
k
k
Можно записать уравнение (6) в матричной форме:
Ay = Br,
(7)
где A и B — полосовые матрицы [9].
Из (7) выходное значение y системы может быть записано как
y =A-1Br = Hr,
(8)
где матрица системы
H = A-1B.
(9)
Обратите внимание, что если A и B являются полосовыми матрицами, то H не является (инвер-
сия полосовой матрицы в общем случае не полосовая). Модель данных (5) записывается в матрич-
ной форме как [19]
y = Hr + w.
(10)
Чтобы оценить коэффициент отражения r(n) по измеренному ультразвуковому сигналу y(n),
рассмотрим задачу оптимизации
1
2
F r)=argmin
y - Hr
+λ
r
,
(11)
2
1
r
2
где λ — параметр регуляризации, который следует выбирать в соответствии с уровнем шума.
Задача оптимизации (11) не может быть решена прямо. Однако используется алгоритм, описан-
ный в [9]. На практике этот алгоритм сходится в несколько итераций и эффективен с точки зрения
вычислительний. Он основан на ММ-методе оптимизации. Можно обобщить алгоритм разрежен-
ной деконволюции в следующие шаги [6, 19, 21].
Шаг 1. Вход: сигнал A-скана y(t), λ, Nit (число итераций), коэффициенты фильтра (b, a) для ли-
нейной стационарной системы свертки H (матрицы A и B).
Шаг 2. Инициализация для первой итерации r = y.
Дефектоскопия
№ 6
2020
18
Бенаммар Абдессалем, Чибане Фарид
Шаг 3. Вычислить
T
T
g←B
×A
×y.
(12)
Шаг 4. Выполнить итерации (от k = 1 до Nit):
1
(k)
W
← diag
r
,
(13)
(
)
k
λ
-
(k+1)
T
T
T
r
←W
g-B
AA
+
BW
B
BW
g
(14)
k
(
k
k
Шаг 5. Вывод: получение коэффициента отражения.
2.4. Предлагаемый метод
В предлагаемом способе улучшение разрешения данных УЗК осуществляется с использова-
нием алгоритма ДВМ и разреженной деконволюции. ДВМ может адаптивно раскладывать ультра-
звуковой сигнал на ряд ЭМ от низких до высоких частот. Частотные составляющие эхосигналов
ультразвукового А-скана в основном доступны в первой ЭМ IMF1, а частотные составляющие
шума распределены в остальных ЭМ. Фильтрованный ультразвуковой сигнал A-скана, получен-
ный с ДВМ, используется в качестве входных данных для алгоритма итеративной деконволюции
для получения A-скана с высоким разрешением. Если y(t) — данные сигнала A-скана, мы можем
описать наш метод следующими шагами.
Шаг 1. Начать с зашумленного сигнала A-скана y(t), содержащего несколько эхосигналов в ка-
честве входных данных.
Шаг 2. Разложить сигнал y(t) A-скана с ДМВ и сохранить IMF1.
Шаг 3. Применить алгоритм разреженной деконволюции к полученной IMF1.
Шаг 4. Найти и локализовать основное эхо (эхо с амплитудой Max) и сохранить его координату.
Шаг 5. Выделить локализованный эхосигнал окном Гаусса.
Шаг 6. Вычесть локализованный эхосигнал из исходного сигнала.
Шаг 7. Повторять процедуру с шага (4) до (6) и использовать результат в качестве нового сиг-
нала, пока Max < Thr. Мы получим А-скан с высоким разрешением.
Пороговое значение представляет собой среднее значение зашумленного сигнала A-скана y(t),
выражаемое как
N
Thr
y t)
/
N,
(15)
=∑
i
t =1
где N — длина сигнала.
Улучшение разрешения данных B-скана с использованием предлагаемого метода сводится к
следующему.
Шаг 1. Изначально на вход алгоритма подаются данные зашумленного B-скана.
Шаг 2. Вычислить ДВМ каждого сигнала A-скана yi(t).
Шаг 3. Применить алгоритм итеративной разреженной деконволюции к улучшенным сигналам
A-сканов.
Шаг 4. Процесс повторяется пока не закончатся A-сканы.
3. ЭКСПЕРИМЕНТЫ И АНАЛИЗ
3.1. Данные моделирования
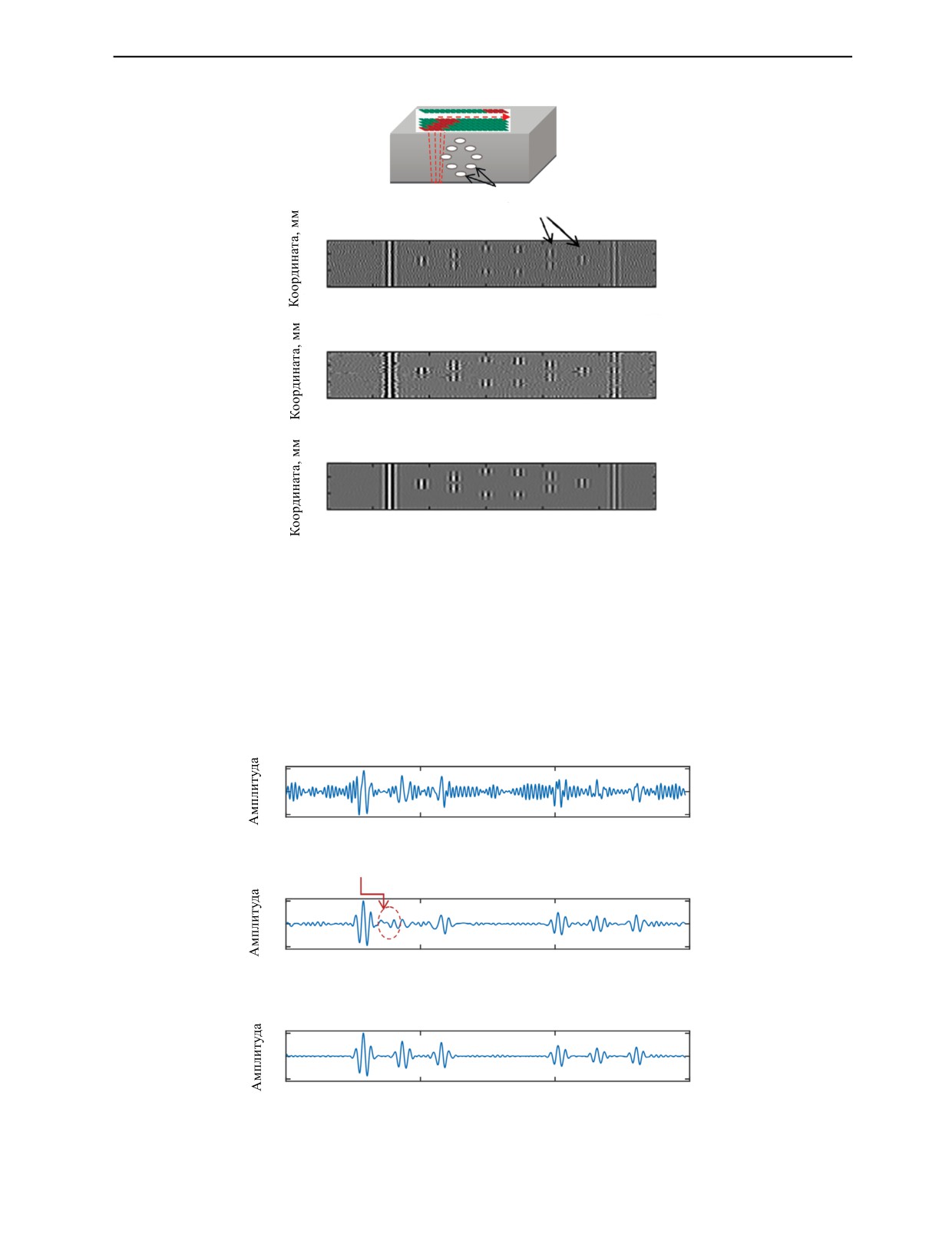
Для применения предложенного метода была использована модель сигнала A-скана, смодели-
рованную Demirli и др. [22]. Образец, использованный для моделирования, показан на рис. 2а. Мы
смоделировали B-скан образца, показанный на рис. 2б, чтобы воспроизвести реальный случай УЗК.
Сигналы A-скана являются результатом свертки функцией отражательной способности, со-
стоящей из нескольких отражателей, и волны центральной частоты, равной 5 МГц. На рис. 2б
показан смоделированный шум (ОСШ = 5 дБ) для B-скана, содержащего несколько дефектов.
Рис. 2в и г показывают результаты улучшения B-сканов с использованием алгоритмов ДЭМ и
ДВМ соответственно.
Дефектоскопия
№ 6
2020
Улучшение разрешающей способности ультразвуковых сигналов...
19
a
А-скан
б
Дефекты
B-скан (ОСШ = 5 дБ)
5
10
15
5
10
15
20
25
30
в
Толщина, мм
Улучшение с использованием ДЭМ
5
10
15
5
10
15
20
25
30
Толщина, мм
г
Улучшение с использованием ДВМ
5
10
15
5
10
15
20
25
30
Толщина, мм
Рис. 2. Образец, используемый для моделирования (a); зашумленный В-скан с дефектами (ОСШ=5дБ) (б); улучшение с
использованием ДЭМ (в); улучшение с использованием ДВМ (г).
На рис. 3а показан сигнал A-скана с координатой (8 мм) на B-скане. Рис. 3б и в показывают
улучшение сигнала с использованием алгоритмов ДЭМ и ДВМ соответственно. Чтобы сравнить
эффективность улучшения сигнала с алгоритмами ДЭМ и ДВМ, мы вычислили ОСШ для различ-
ных уровней шума во входном сигнале.
a
А-скан (позиция 8 мм)
1
0
-1
0
10
20
30
Толщина, мм
Эхосигнал
с малой амплитудой
б
Улучшение с использованием ДЭМ
1
0
-1
0
10
20
30
Толщина, мм
в
Улучшение с использованием ДВМ
1
0
–1
0
10
20
30
Толщина, мм
Рис. 3. Исходный A-скан с ОСШ 5дБ (a); улучшение с использованием ДЭМ (б); улучшение с использованием ДВМ (в).
Дефектоскопия
№ 6
2020
20
Бенаммар Абдессалем, Чибане Фарид
ОСШ оценивалось на основе среднего квадратического (СК) улучшенного сигнала (СКсигн) и
СК шума (СКшум) с использованием следующего соотношения [23, 24]:
RMS
signal
SNR
=
20log
,
(16)
RMS
noise
где SNR — ОСШ, RMSsignal — СКсигн, RMSnoise — СКшум.
Таблица
1
Улучшение ОСШ при использовании ДЭМ и ДВМ
Уровни шума, дБ
15
10
5
1,5
Улучшение с ДЭМ, дБ
22,51
16,89
13,03
9,95
Улучшение с ДВМ, дБ
35,72
29,11
22,39
15,35
Из результатов, представленных в табл. 1, мы можем видеть, что повышение уровня ОСШ ис-
ходного сигнала является значительным при использовании алгоритма ДВМ по сравнению с ре-
зультатами, полученными с использованием алгоритма ДЭМ.
a
5
10
15
5
10
15
20
25
30
Толщина, мм
б
5
10
15
5
10
15
20
25
30
Толщина, мм
Рис. 4. Результаты применения предложенного метода на улучшенном B-скане: используя ДЭМ (а); используя ДВМ (б).
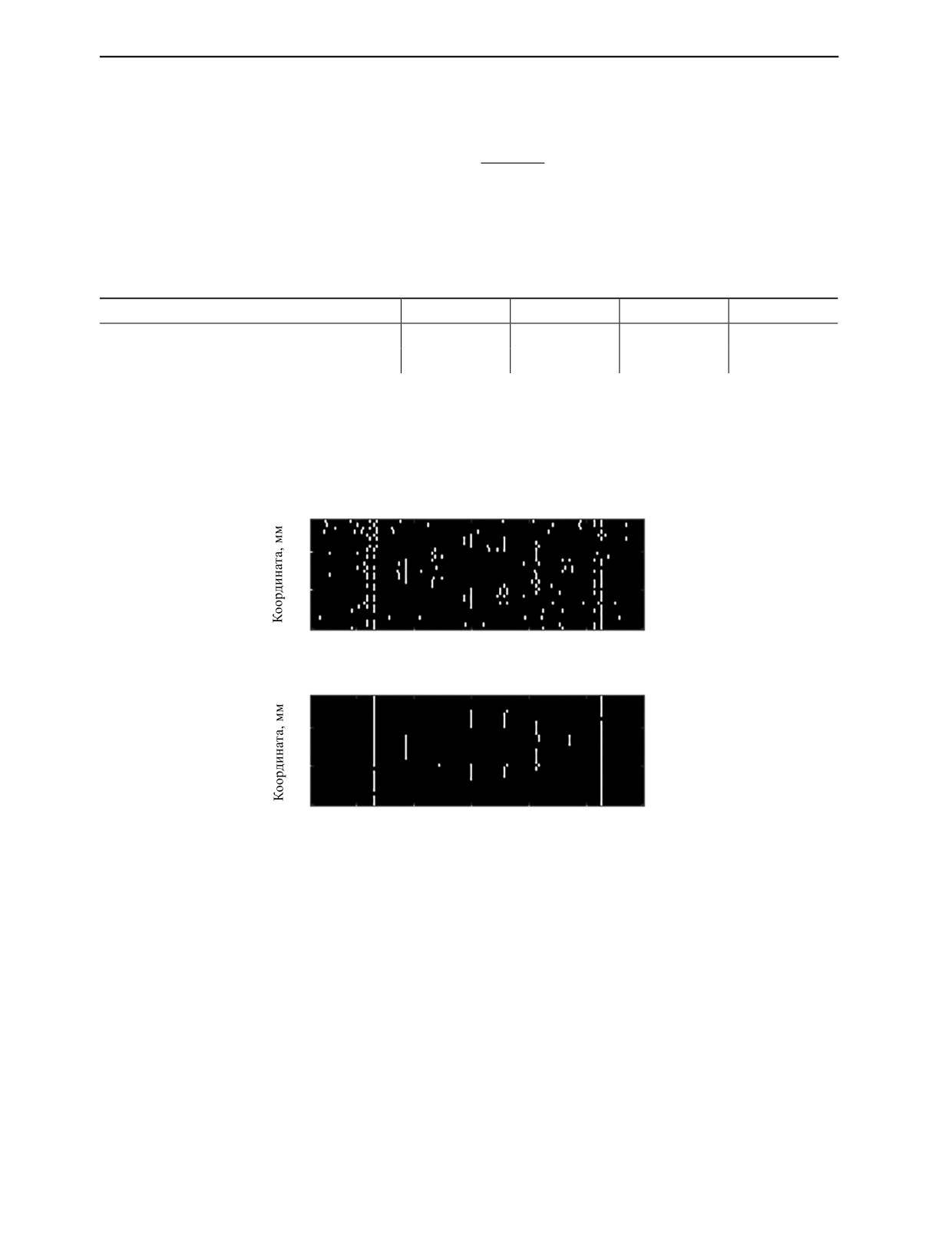
На рис. 4a показан результат применения предложенного метода для улучшенного B-скана с
использованием алгоритма ДЭМ. Можно отметить появление ложных эхосигналов при использо-
вании предложенного метода, основанного на улучшении данных B-скана методе ДЭМ. На рис. 4б
показан результат применения предложенного метода улучшенного B-скана с использованием ал-
горитма ДВМ. Полученный по предлагаемому способу результат, основанный на улучшении уль-
тразвукового B-скана алгоритмом ДВМ, лучше по сравнению с результатом предложенного метода
с использованием алгоритма ДЭМ.
3.2. Данные УЗК
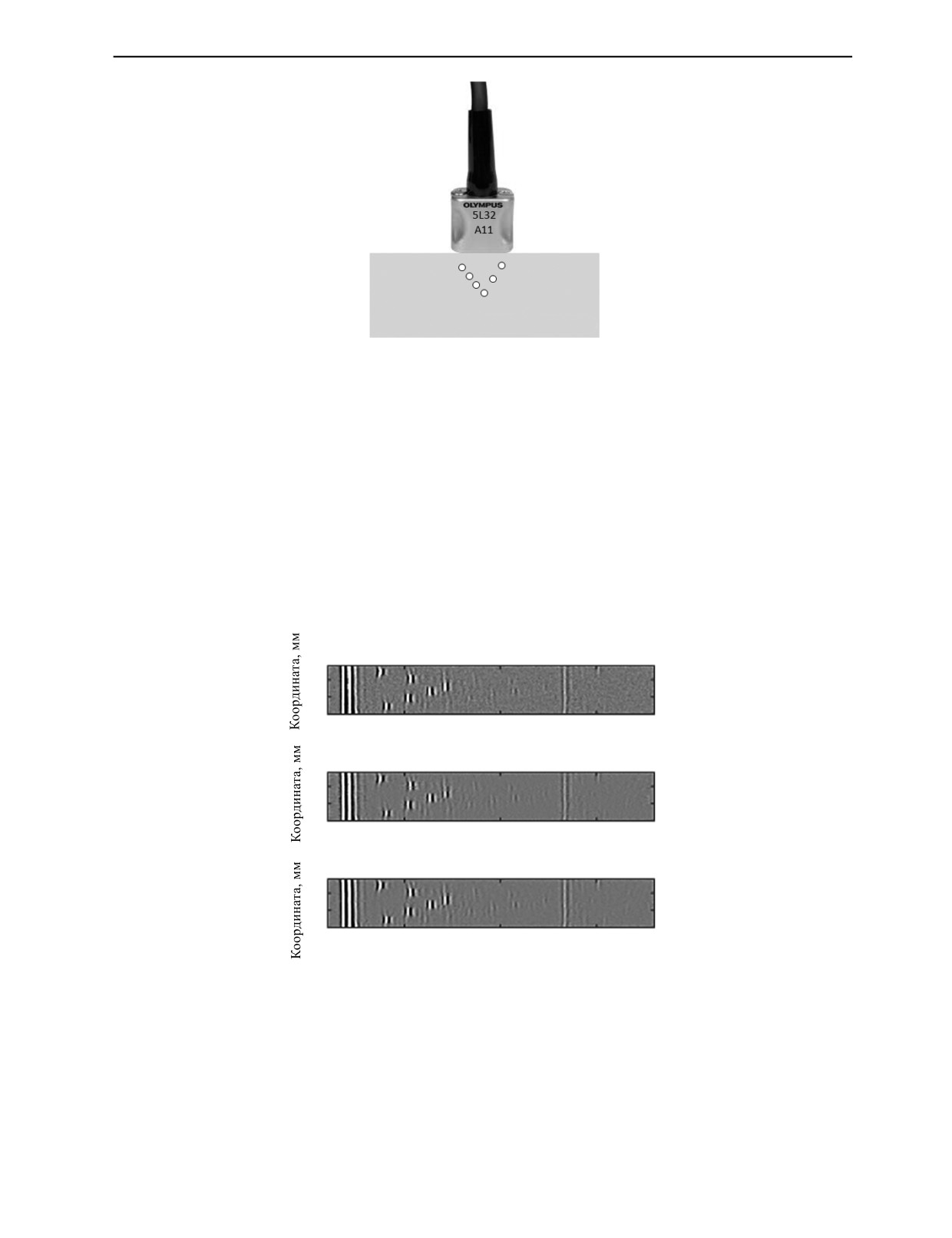
Предложенный метод был экспериментально проверен на образце из нержавеющей стали
размером 100×50×12 мм. Отверстия диаметром 1,5 мм были просверлены с интервалом от 1,75
до 3,25 мм, как показано на рис. 5, чтобы изучить точность контроля. Скорость звука в этом мате-
Дефектоскопия
№ 6
2020
Улучшение разрешающей способности ультразвуковых сигналов...
21
Отверстия (∅ 1,5 мм)
Рис. 5. Образец из нержавеющей стали, датчик и геометрия отверстий.
риале Vобр = 5800 м/с. Такой случай часто встречается на производстве, когда несколько дефектов
присутствуют в одной и той же зоне, на расстоянии нескольких миллиметров друг от друга. Та-
кая геометрия приводит к ультразвуковым сигналам, когда несколько эхосигналов близки во вре-
мени. Такая ситуация может ввести в заблуждение дефектоскописта, который может ошибиться
при диагностике. Поэтому целью этого эксперимента является показать полезность этого типа
обработки сигналов для пользователей в области УЗК.
Ультразвуковые сигналы в этом эксперимента были получены с помощью дефектоскопа
OMNISCAN MX компании Olympus. Используемый датчик состоит из 32 линейных пьезоэле-
ментов с центральной частотой 5 МГц. Сигналы A-скана были экспортированы с помощью ПО
TOMOVIEW и представлены в виде B-скана.
a
5
10
15
5
10
15
Толщина, мм
б
5
10
15
5
10
15
Толщина, мм
в
5
10
15
5
10
15
Толщина, мм
Рис. 6. Экспериментальный B-скан, полученный на образце из нержавеющей стали (a); улучшение с использованием
ДЭМ (б); улучшение с использованием ДВМ (в).
На рис. 6а показан B-скан, полученный на образце из нержавеющей стали. На рис. 6б и в пред-
ставлены результаты улучшения, полученные с использованием алгоритмов ДЭМ и ДВМ соответ-
ственно. Чтобы оценить работу алгоритмов, мы рассчитываем ОСШ на входном эксперименталь-
ном B-скане и на выходе алгоритмов ДЭМ и ДВМ. Отношение сигнал/шум на входном B-скане
составляет ОСШвх = 11,51 дБ. ОСШ алгоритма ДЭМ равно ОСШДЭМ = 14,12 дБ, а ОСШ алгоритма
ДВМ равно ОСШДВМ = 16,73 дБ. Из результатов видно, что повышение уровня ОСШ исходного
Дефектоскопия
№ 6
2020
22
Бенаммар Абдессалем, Чибане Фарид
a
5
А-скан
(координата 12 мм)
10
15
5
10
15
Толщина, мм
б
5
10
15
5
10
15
Толщина, мм
Рис. 7. Предложенный метод с использованием ДЭМ (a); предложенный метод с использованием ДВМ (б).
сигнала является значительным при использовании алгоритма ДВМ по сравнению с результатами,
полученными с использованием алгоритма ДЭМ.
На рис. 7a и б представлены результаты применения предложенного метода к эксперименталь-
ному B-скану, полученному с использованием алгоритмов ДЭМ и ДВМ соответственно.
Можно отметить, что результат предложенного метода, использующего улучшение алгоритма
ДВМ, лучше, чем использование улучшение алгоритма ДЭМ. На рис. 7a видно, что при использо-
вании алгоритма ДЭМ появляется несколько ложных эхосигналов.
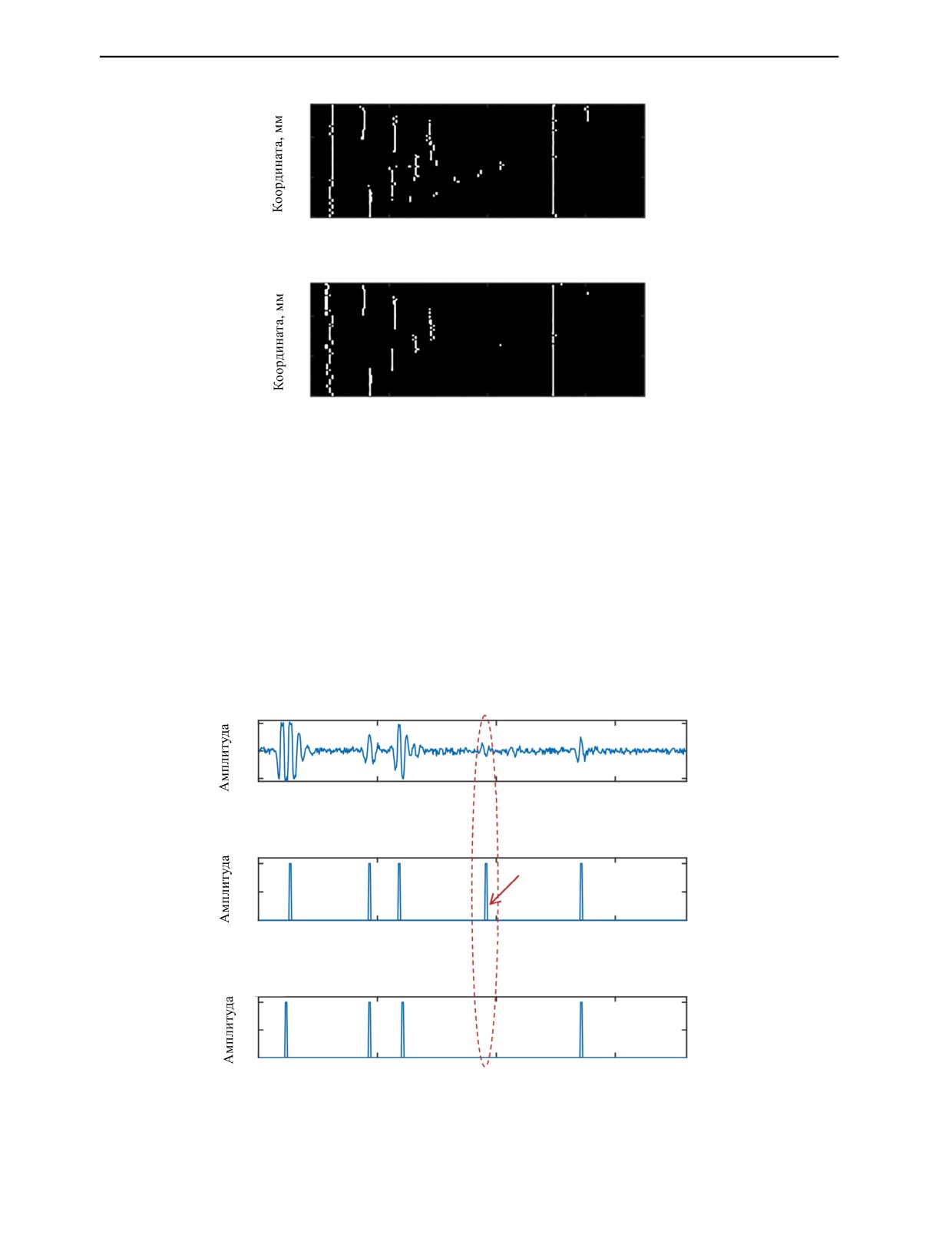
На примере A-скана с координатой 12 мм мы можем видеть, что появляется ложный эхосигнал
при использовании алгоритма ДЭМ (рис. 8б).
a
1
0
-1
0
5
10
15
Толщина, мм
б
1
Ложный эхосигнал
0,5
0
0
5
10
15
Толщина, мм
в
1
0,5
00
5
10
15
Толщина, мм
Рис. 8. A-скан (координата 12 мм) (a); предложенный метод с использованием ДЭМ (б); предложенный метод с
использованием ДВМ (в).
Дефектоскопия
№ 6
2020
Улучшение разрешающей способности ультразвуковых сигналов...
23
На рис. 8a, б и в показан экспериментальный A-скан (координата 12 мм) и результаты его об-
работки с использованием предложенного метода и алгоритмами ДЭМ и ДВМ соответственно.
Принимая во внимание полученные результаты улучшения разрешения УЗ-данных, можно сделать
вывод, что применение данных методов в УЗК представляет большой интерес.
4. ЗАКЛЮЧЕНИЕ
В данной статье рассмотрен новый метод, применяемый к сигналам УФР. Предложенный спо-
соб должен обеспечить автоматический анализ УЗК для улучшения разрешения УЗ-данных и об-
легчения контроля дефектов и определения их положения. Следует отметить, что современные
методы определения параметров дефектов основаны на тяжелых ручных процедурах и не под-
ходят для больших массивов информации, получаемых при УЗК. Сначала мы представили модель
ультразвукового сигнала. Впоследствии мы представили алгоритмы ДЭМ и ДВМ. Далее мы пред-
ставили теорию используемого метода деконволюции. В последней части раздела 2 мы показали
этапы при обработке сигналов предложенным методов. В экспериментальной части мы применили
предложенный метод на смоделированных и реальных данных. Как показано в табл. 1, полученные
результаты подтверждают, что повышение уровня ОСШ исходного сигнала является значительным
при использовании алгоритма ДВМ по сравнению с результатами, полученными с использованием
алгоритма ДЭМ. Результаты, полученные предложенным способом, являются весьма удовлетвори-
тельными с точки зрения улучшения качества сигнала и обнаружении дефектов. Настоящая работа
может дать эффективное решение проблемы автоматического анализа данных УФР и открывает
интересные перспективы.
СПИСОК ЛИТЕРАТУРЫ
1. Osman A. Automated evaluation of three dimensional ultrasonic datasets / Der Technischen Fakultät der.
Universität Erlangen—Nürnberg, 2013.
2. Humeida Y., Wilcox P.D., Todd M.D., Drinkwater B.W. A probabilistic approach for the optimisation of
ultrasonic array inspection techniques // NDT & E Inter. 2014. V. 68. P. 43—52.
3. Jin H., Yang K., Wu S., Wu H., Chen J. Sparse deconvolution method for ultrasound images based on
automatic estimation of reference signals // Ultrasonics. 2016. V. 67. P. 1—8.
4. Benammar A., Drai R., Kechida A., Dris L., Chibane F. Enhancement of phased array ultrasonic signal
in composite materials using TMST algorithm // Physics Procedia. 2015. V. 70. P. 488—491.
5. Benammar A., Drai R. Ultrasonic flaw detection in composite materials using SSP-MPSD algorithm //
Journal of Electrical Engineering & Technology (JEET). 2014. V. 9 (5). P. 1753—1761.
6. Wu B., Huang Y., Krishnaswamy S. A Bayesian approach for sparse flaw detection from noisy signals for
ultrasonic NDT // NDT&E Inter. 2017. V. 85. P. 76—85.
7. Bilgutay N.M., Saniie J. The effect of grain size on flaw visibility enhancement using split spectrum
processing // Material Evaluations. 1984. V. 4 (2).
P. 847—851.
9. Song S., Que P. Wavelet based noise suppression technique and its application to ultrasonic flaw detection
// Ultrasonics. 2006. V. 44 (2). P. 188—193.
10. Malik M.A., Saniie J. S-transform applied to ultrasonic non-destructive testing // IEEE Int. Ultrason.
Symp. Proc. 2008. P. 184—187.
11. Lu Y., Oruklu E., Saniie J. Chirplet signal and empirical mode decompositions of ultrasonic signals for
echo detection and estimation // Journal of Signal and Information Processing. 2013. V. 4. P. 149—157.
12. Huang N.E., Shen Z., Long S.R., Wu M.C., Shih H.H., Zheng Q., Yen N.C., Tung C.C., Liu H.H. The
// Proc. R. Soc. Lond. Ser. 1998. V. 454 (3). P. 903—995.
13. Dragomiretskiy K. Variational methods in signal decomposition and image processing. Ph.D thesis,
University of California, Los Angeles, 2015.
14. Dragomiretskiy K., Zosso D. Variational mode decomposition // IEEE Transactions on Signal Processing.
2014. V. 62 (3). P. 531—544.
15. Kern M. Problèmes Inverses. INRIA, 2002—2003.
16. Kormylo J.J., Mendel J.M. Mazimum likelihood detection and estimation of Bernouilli-Gaussian
processes // IEEE trans. on information theory. 1982. V. 28 (3). P. 482—488.
17. Liang W., Que P.W., Lei H.M., Chen L. Matching pursuit for decomposition and approximation of
ultrasonic pulse-echo wavelet and its application in ultrasonic nondestructive evaluation // Rev. Sci. Instrum.
2008. V. 79 (7).
Дефектоскопия
№ 6
2020
24
Бенаммар Абдессалем, Чибане Фарид
18. Zhang G.M., Zhang C.Z., Harvey D.M. Sparse signal representation and its applications in ultrasonic
NDE // Ultrasonics. 2012. V. 52 (3). P. 351—363.
19. Selesnick I.W. Sparse signal estimation by maximally sparse convex optimization // IEEE Transactions
on Signal Processing. 2014. V. 62 (5). P. 1078—1092.
20. Xin J., Bilgutay N.M. Ultrasonic range resolution enhancement using L1 norm deconvolution // IEEE
Trans. Ultrasonics Symposium. 1993. P. 711—714.
21. Lu J.Y., Ye D., Ma W.P. Time delay estimation based on variational mode decomposition // Advances in
Mechanical Engineering. 2017. V. 9 (1). P. 1—6.
22. Demirli R., Saniie J. Model-based estimation of ultrasonic echoes. Part I: analysis and algorithms //
IEEE Trans Ultrason Ferroelectr Freq Control. 2001. V. 48 (3). P. 787—802.
23. Zhu Y., Weight J.P. Ultrasonic nondestructive evaluation of highly scattering materials using adaptive
filtering and detection // IEEE Transactions On Ultrasonics, Ferroelectrics, And Frequency Control. 1994.
V. 41. № 1.
24. Unluturk M.S., Saniie J. Deconvolution neural networks for ultrasonic testing // IEEE Ultrasonics
Symposium. 1995. P. 715—719.
Дефектоскопия
№ 6
2020