Оптические методы
УДК 620.179.118.4:621.375.326
ПРИНЦИПЫ ПОСТРОЕНИЯ ИЗМЕРИТЕЛЬНЫХ СХЕМ ТЕХНОЛОГИЧЕСКОГО
КОНТРОЛЯ
© 2020 г. В.Е. Махов1,*, А.И. Потапов2,**, В.В. Широбоков1,***, Я.Г. Смородинский3,4
1Военно-космическая академия им. А.Ф. Можайского, Россия 197082 Санкт-Петербург, Ждановская ул.,
13
2Санкт-Петербургский горный университет, Россия 199106 Санкт-Петербург, Васильевский остров, 21
линия, 2
3Институт физики металлов имени М.Н. Михеева УрО РАН, Россия 620108
Екатеринбург, ул. Софьи Ковалевской, 18
4ФГАОУ ВПО «Уральский федеральный университет имени первого Президента России Б.Н. Ельцина»,
Россия 620002 Екатеринбург, ул. Мира, 19
E-mail: * wmahov@gmail.com; **apot@mail.ru; ***17126vlad@gmail.com
Поступила в редакцию 27.01.2020; после доработки 10.04.2020
Принята к публикации 06.05.2020
Рассмотрены вопросы построения измерительных систем технологического контроля и мониторинга объектов на
базе гетеродинно-растрового преобразования оптических информационных полей, полученных в оптико-электронных
системах. Описан принцип построения схемных решений получения периодических сигналов сформированных ин-
формационных полей, фазовый параметр которых связаны с контролируемыми параметрами наблюдаемых объектов.
Детально рассмотрены типичные схемы контроля геометрических параметров оптически прозрачных и непрозрачных
объектов. Для рассмотренных схем проведен анализ чувствительности отклонения контролируемого от номинального
параметра. Представлены схемные решения контроля нормальных и касательных деформаций поверхности контролиру-
емого объекта методами интерферометрии. Разработана методика контроля первой и второй производной смещений то-
чек поверхности методом голографической и спекл-фотографии. Показаны пути практической реализации гетеродинно-
растровых преобразователей. Указаны перспективные направления формирования периодических сигналов с фазовым
информационным параметром на базе твердотельных простых и вложенных матричных структур фотодиодов.
Ключевые слова: технологический контроль, гетеродинно-растровое преобразование, формирование информаци-
онных полей, фазовый детектор, фазово-растровый дилатометр, голографическая интерферометрия, спекл-фотография,
матричный фотоприемник, регистратор светового поля.
DOI: 10.31857/S0130308220060032
ВВЕДЕНИЕ
Технологический контроль (ТК) изделий является наиболее важной областью современ-
ного производства или систем технического мониторинга состояния наблюдаемых объектов.
Отличительной особенностью ТК является высокая чувствительность к контролируемому пара-
метру и помехозащищенность к внешним факторам, возможность непрерывного мониторинга
контролируемых параметров объектов контроля. При этом средствам ТК необходимо обеспечить
высокое быстродействие, встраиваемость в технологический процесс или систему мониторинга.
Аналогичные по своему характеру задачи возникают в других важных областях, например, в
средствах мониторинга объектов космического мусора, включающих как крупные, так и мелкие
объекты природного или искусственного происхождения. Основной проблемой космического му-
сора является то, что объекты могут долго находиться на орбите. Так объекты, находящиеся на
высоте до 600 км, за счет тормозящего эффекта атмосферы постепенно снижаются и сгорают в
плотных слоях атмосферы (до 200 км — несколько дней, а от 200 до 600 км — до нескольких лет).
Объекты на высотах свыше 800 км могут находиться в космическом пространстве десятки и сотни
лет. Особенно остро встает проблема мониторинга космического мусора на геостационарной орби-
те, которая является наиболее удаленной, привлекательной и выгодной для решения различных на-
учных и коммерческих задач. Каждый год на геостационарную орбиту запускают десятки спутни-
ков, в то же время орбита заполняется отработавшими ресурс спутниками и другим космическим
мусором (ступени ракет, детали старых спутников и др.).
Мониторинг изменения обстановки в околоземном космическом пространстве позволяет полу-
чить наиболее точные данные для безопасного вывода на орбиту новых объектов и изменения ор-
биты действующих спутников для предотвращения чрезвычайных ситуаций, а также учесть риски
и последствия столкновения с космическим мусором в процессе эксплуатации на основе монито-
ринга технического состояния спутников.
26
В.Е. Махов, А.И. Потапов, В.В. Широбоков, Я.Г. Смородинский
Поэтому разработка принципов построения средств ТК и мониторинга окружающей среды яв-
ляется важной задачей во многих значимых сферах человеческой деятельности.
АНАЛИЗ СРЕДСТВ ТЕХНОЛОГИЧЕСКОГО КОНТРОЛЯ
В настоящее время оптические системы остаются одними из самых производительных средств
ТК в промышленности и других сферах хозяйственной деятельности [1]. Использование системы
электронной регистрации оптического изображения и средств компьютерной обработки изобра-
жений расширяет возможности применения класса оптико-электронных систем (ОЭС) в области
автоматизированного контроля технологических процессов, например изготовления изделий и
контроля обрабатывающего инструмента [2], а так же построение интеллектуальных систем про-
мышленного технологического контроля [3]. Следует отметить, что на базе интегральных мате-
матических методов обработки получаемой информации (например, непрерывное вейвлет-преоб-
разование) существует возможность получить достаточно высокую чувствительность измерений
и помехозащищенность [4]. Однако все оптические средства, использующие электронную реги-
страцию, требуют учета объемных параметров отображаемого пространства и объекта контроля,
что вызывает необходимость проведения калибровки измерительной системы [5, 6]. При этом не
всегда удается обеспечить достаточную устойчивость результатов контроля к воздействию некон-
тролируемых внешних факторов.
Наряду с известными принципами оптического неразрушающего контроля [4, 7] с целью полу-
чения более высокой точности и помехозащищенности при автоматизированном способе получе-
ния результатов остаются актуальным принцип построения измерительных ОЭС на базе фазовых
измерений специальным образом сформированных сигналов [8, 9], когда контролируемый пара-
метр объекта контроля отображается в периодические сигналы с фазовой характеристикой. Тогда
мониторинг контролируемого параметра производится по разности фаз получаемых сигналов [10].
При этом технически создаются наиболее благоприятные условия построения автоматизирован-
ных систем промышленного контроля, оперативного получения отклонения исследуемых параме-
тров объекта от номинального значения и возможность управления режимами технологического
процесса.
Основные преимущества способа контроля, который использует принцип определения контро-
лируемого параметра через функцию взаимной корреляции формоизменения сигналов, сформи-
рованной измерительной системой, на практике дают более высокую точность и помехозащищен-
ность, более полное использование полезной информации регистрируемого светового поля.
Используемые в настоящее время для регистрации яркостных полей матричные фотоприемни-
ки [11] и интегральные математические методы обработки сигналов [4] можно рассматривать как
аналог координатно-временного преобразования яркостных полей или их растровую модуляцию.
Однако матричные фотоприемники обладают ограниченным диапазоном измерений и узким дина-
мическим диапазоном регистрируемых яркостных полей.
В настоящее время представляет интерес разработка единой методики построения систем
ТК для каждого типа объектов и их контролируемых параметров. Необходимо также определить
пути совершенствования метода фазовых измерений для систем ТК в направлении использования
перспективных методов регистрации яркостных полей [12]. Актуальным является рассмотрение
новых возможностей контроля по цифровой регистрации волновых фронтов состояния и формы
поверхности объектов [13] в плане возможности применения схем с использованием аналога прин-
ципа фазовых измерений.
ПОСТРОЕНИЯ ИЗМЕРИТЕЛЬНЫХ ГЕТЕРОДИННО РАСТРОВЫХ СХЕМ
В зависимости от выбранной геометрии контролируемого волнового фронта, то есть структур-
ного вида яркостного информационного поля S(r) и типа его параметров, связанных с измерениями
на контролируемом объекте, можно выделить следующие возможные типы схем гетеродинно-рас-
трового (ГР) контроля [10]:
одноточечная схема — определение координат центра тяжести r0 локализованной яркостной
структуры S(r), которое осуществляется по фазе периодического сигнала, полученного путем схем-
ного преобразования r0→u(ω, φ);
двухточечная схема — определение периода Ts и угла его наклона θ яркостной структуры S(r),
которые осуществляются путем преобразования их в разность фаз двух и более периодических
сигналов {Ts, θ} →{u1(ω, φ), u2(ω, φ+∆φ1), …};
Дефектоскопия
№ 6
2020
Принципы построения измерительных схем технологического контроля
27
многоточечная схема — определение различных параметров яркостной структуры S(r) (про-
изводных d/dx, d2/dx2) по разность фаз двух и более периодических сигналов с разными частотами.
Рассмотрим построения оптических измерительных схем контроля геометрических параме-
тров объекта для этих типов схем на конкретных примерах.
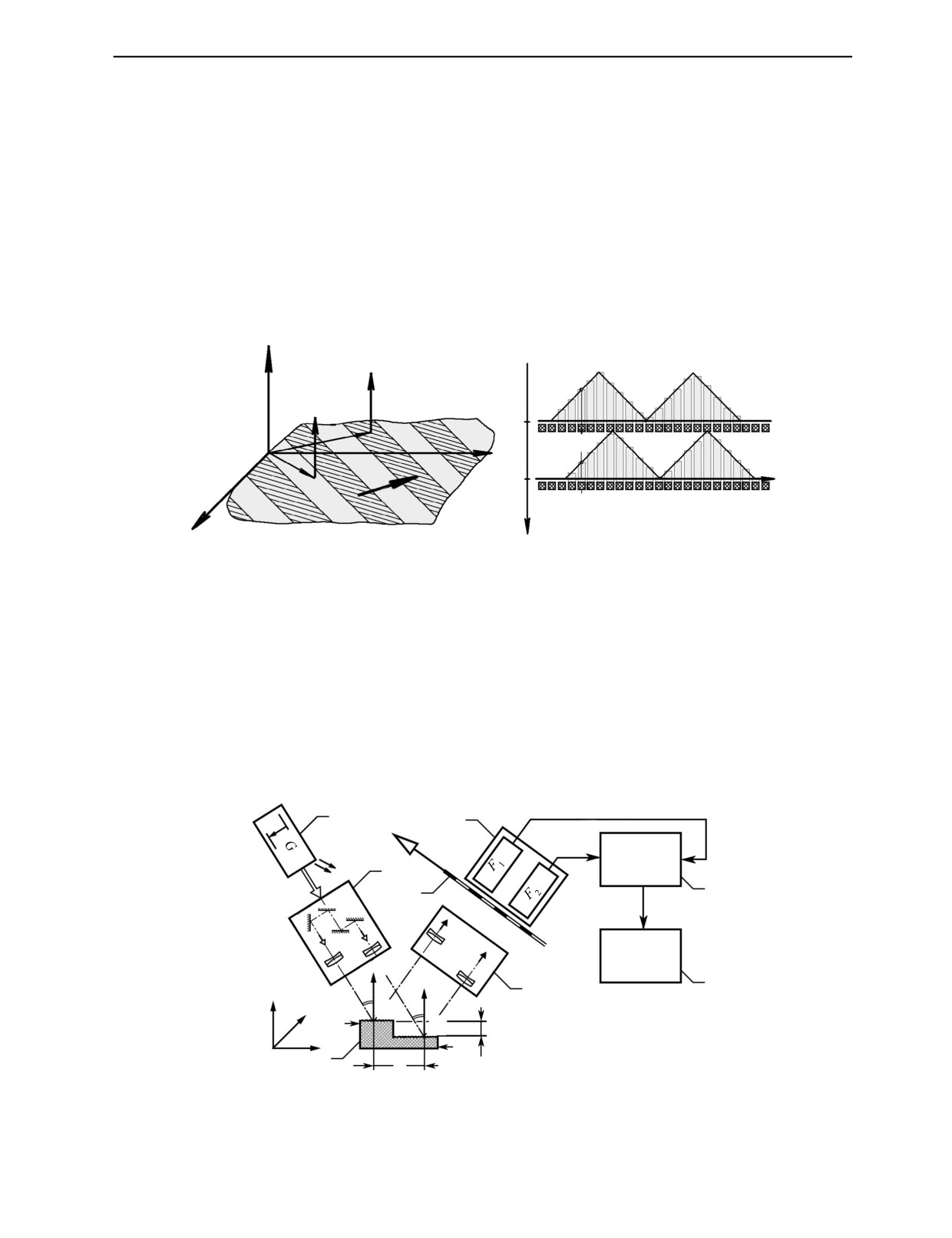
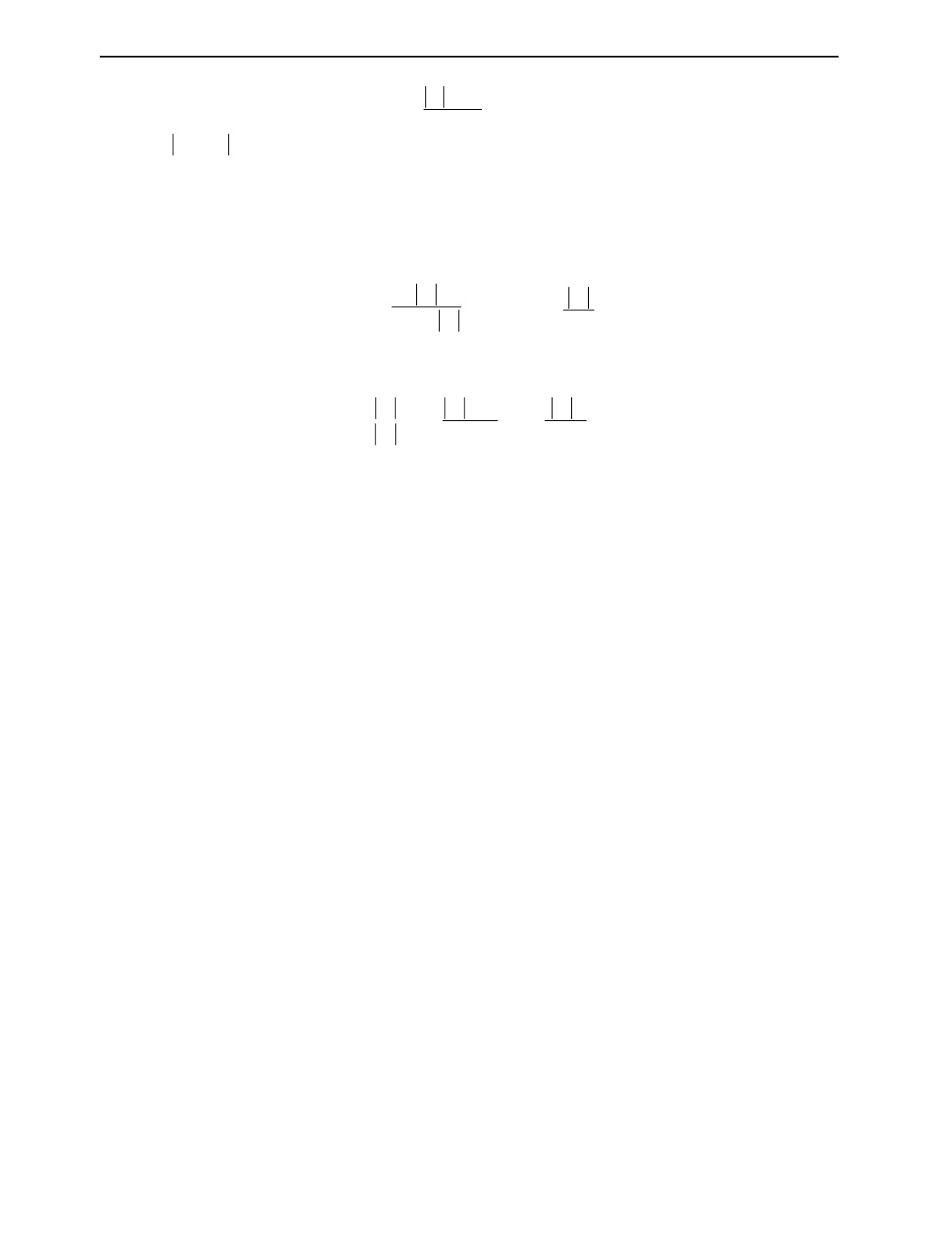
Одноточечная схема. Распределение интенсивности освещенности S(r) энергетически локали-
зовано в наблюдаемой области (Е), а координаты центра распределения интенсивности освещен-
ности <S(r)> определяет измеряемый параметр объекта контроля. Фаза выходного периодического
сигнала u(t, φ) определяется фазой растра в каждой точке (рис. 1а), то есть его временная форма со-
ответствует пространственно-временной формой растра u1(t, φ1) ≈ R(t, a1). Для другого точечного
источника S2(r), расположенного в точке с координатой a2, будем иметь аналогичное выражение, то
есть u2(t, φ2) ≈ R(t, a2). Очевидно, проекцию расстояния в направлении периода растра между ис-
точниками a1- a2 можно определить по разности фаз полученных периодических сигналов φ1- φ2.
а
б
Z
S1
S2
i
j
X
i + 1
TR
j - k
qi
Y
Рис. 1. Принципы фазово-растрового метода контроля:
а — точечные источники на растровой структуре; б — форма дискретного преобразования источника на прямоугольном растре.
Данная схема может быть использована как для измерения локальных деформации и наклонов,
как для зеркальных, так и диффузно отражающих поверхностей объектов, в том числе оптически
прозрачных (фазовых) объектов.
Примером построения схемы такого вида контроля является оптический фазово-растровый ди-
латометр [14], предназначенный для контроля изменения толщины слоя слабосвязанного матери-
ала относительно основания (например, порошкового материала на подложке, формирующегося
в покрытие). Оптическая схема дилатометра выполнена на основе двухканальной одноточечной
схемы (рис. 2).
1
u1(q)
6
Q
u2(q)
2
∆φ
5
7
L0
M'1
O1
M'2
L2
L
1
O
N1
2
8
N2
4
Z
α
M2
3'
M1
H
3
3''
X
B
Рис. 2. Одноточечная двухканальная схема контроля толщины ступенчатой поверхности:
1 — лазер; 2 — осветительное устройство; 3 — объект контроля (3′ — поверхность контролируемого слоя, 3′′ — поверхность под-
ложки); 4 — проекционная оптика (O1, O2); 5 — растр (ГР-преобразователь); 6 — фотоприемники (F1, F2); 7 — фазовый детектор;
8 — регистрирующий прибор.
Дефектоскопия
№ 6
2020
28
В.Е. Махов, А.И. Потапов, В.В. Широбоков, Я.Г. Смородинский
Отличием такой схемы от аналогичных растровых схем [15] является отсутствие жестко свя-
занных с образцом реперных меток. Световые метки М1(x1, z1)
и М2(x2, z2) на двух базовых по-
верхностях образца 3′ и 3′′ в требуемых координатах (x1 = x2 + B) формируются двумя сфокуси-
рованными гомоцентрическими пучками лучей L1 и L2 от лазерного источника 1 (L0) с помощью
оптического осветительного устройства 2, в качестве которого используется устройство интер-
ферометрического типа [16]. Световые метки формируются под углом визирования α к норма-
лям N1 и N2 соответствующих базовых поверхностей. В данной измерительной схеме может
быть использован также некогерентный источник освещения. Нормальное смещение базовых
поверхностей (z2 = z1 + H) вызывает смещение изображений построенных оптической системой
4 световых реперных меток М′1 и М′2 в области растрового модулятора 5. Каждое смещение по-
верхностей изменяет фазу модулированных световых потоков от световых меток, которые реги-
стрируются фотоприемниками 6 (F1 и F2) в выходные электрические сигналы: u1(t+φ1) и u2(t+ φ2).
Разность фаз сигналов ∆φ = φ2 - φ1 определяется фазовым детектором 6 и связана с изменением
высоты Н поверхности образца следующим выражением:
∆ϕ
T
R
H
=βo.s.
,
(1)
2π
2 sin
α
где βo.s. — линейное увеличение оптической системы 4, TR — период растрового модулятора.
Предельная чувствительность такой измерительной схемы определяется из условия:
2,44λ
f'
δH
=
δ∆ϕ,
(2)
πsinα
D
где (D/f ′) — относительное отверстие оптической системы осветителя 2, формирующей световую
метку.
Для параметров оптической схемы: α = 30°, λ = 0,63 мкм (He—Ne-лазер), (D/f ) = l : 2, δ∆φ = 10-3,
чувствительность измерения будет составлять δH = 2.10-3 мкм.
Принцип измерения сохранится, если информационное поле локализовано по одной коорди-
нате, перпендикулярной периоду ГР-преобразователя ТR, что может быть использовано в описан-
ной выше схеме (см. рис. 2), при этом световые метки имеют вид линейных полос освещенности,
перпендикулярных плоскости рисунка, которые могут быть получены, например, цилиндрическим
объективом.
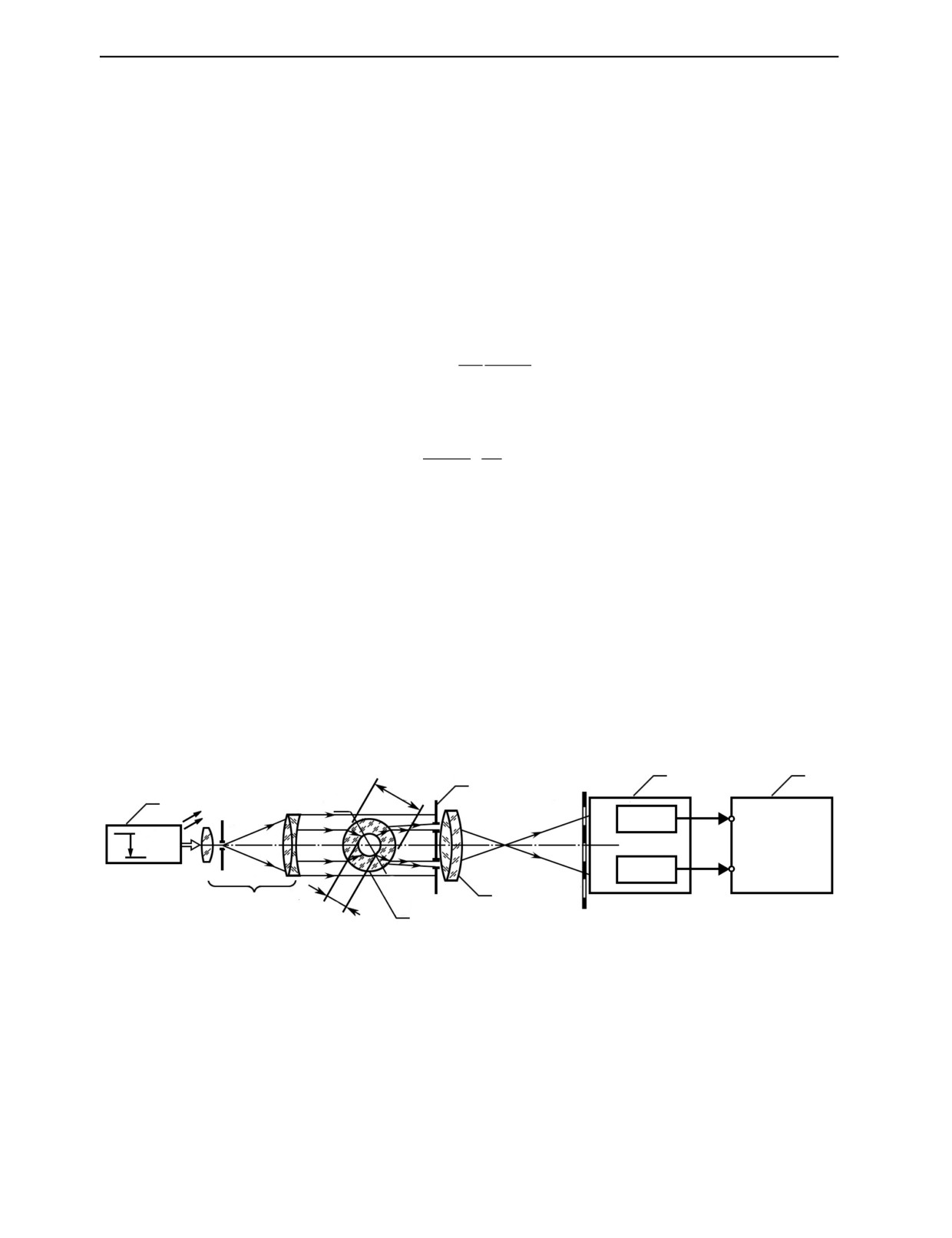
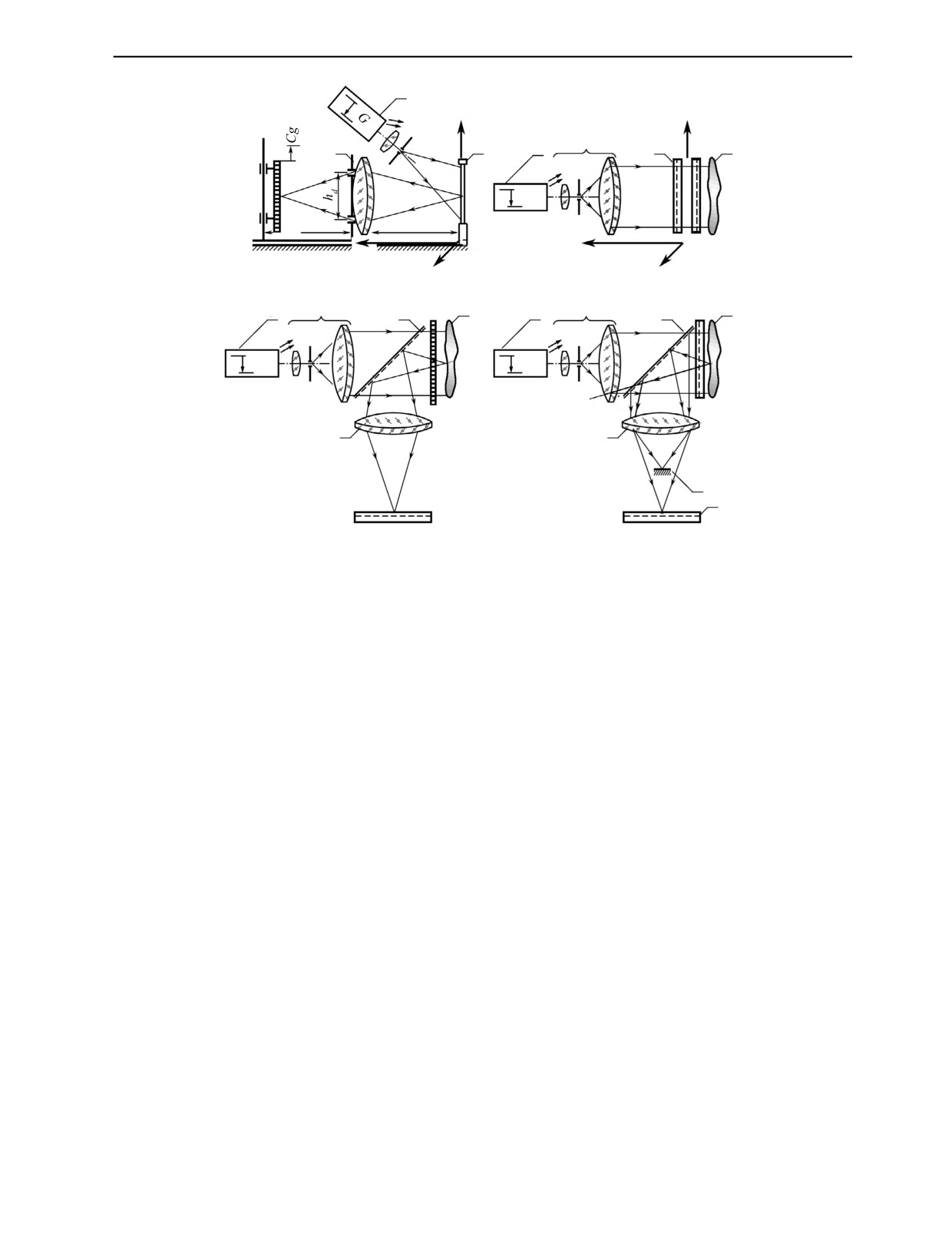
Схемы, построенные по этому принципу (рис. 3), позволяют осуществить контроль геометри-
ческих параметров трубчатых оптически прозрачных изделий (например, капилляров) [17], кото-
рые имеют внутренний диаметр d0, наружный диаметр D0 и показатель преломления материала nT.
6
7
4
D0
1
M
1
M'1
F
1
G
∆φ
L
0
F2
M2
5
M'
2
2
d
3
0
Рис. 3. Измерительная схема контроля оптических капилляров:
1 — лазер; 2 — телескопическая система; 3 — объект контроля; 4 — диафрагма угловой фильтрации выходящий лучей; 5 — проекци-
онная оптика; 6 — ГР-преобразователь; 7 — фазовый детектор.
Нетрудно видеть, что в этом случае характер получаемых линейных световых меток опреде-
ляется цилиндрическими формами поверхностей самого капилляра и геометрией диафрагмы 4,
которая осуществляет угловую фильтрацию проходящего капилляр пучка лучей. В общем слу-
чае оптический капилляр можно также представить как двухфазную гетерогенную регулярную
структуру [18], в этом случае можно говорить, что данная схема позволяет контролировать пара-
метры структуры гетерогенного материала, а структура изделия формирует параметры световых
меток.
Дефектоскопия
№ 6
2020
Принципы построения измерительных схем технологического контроля
29
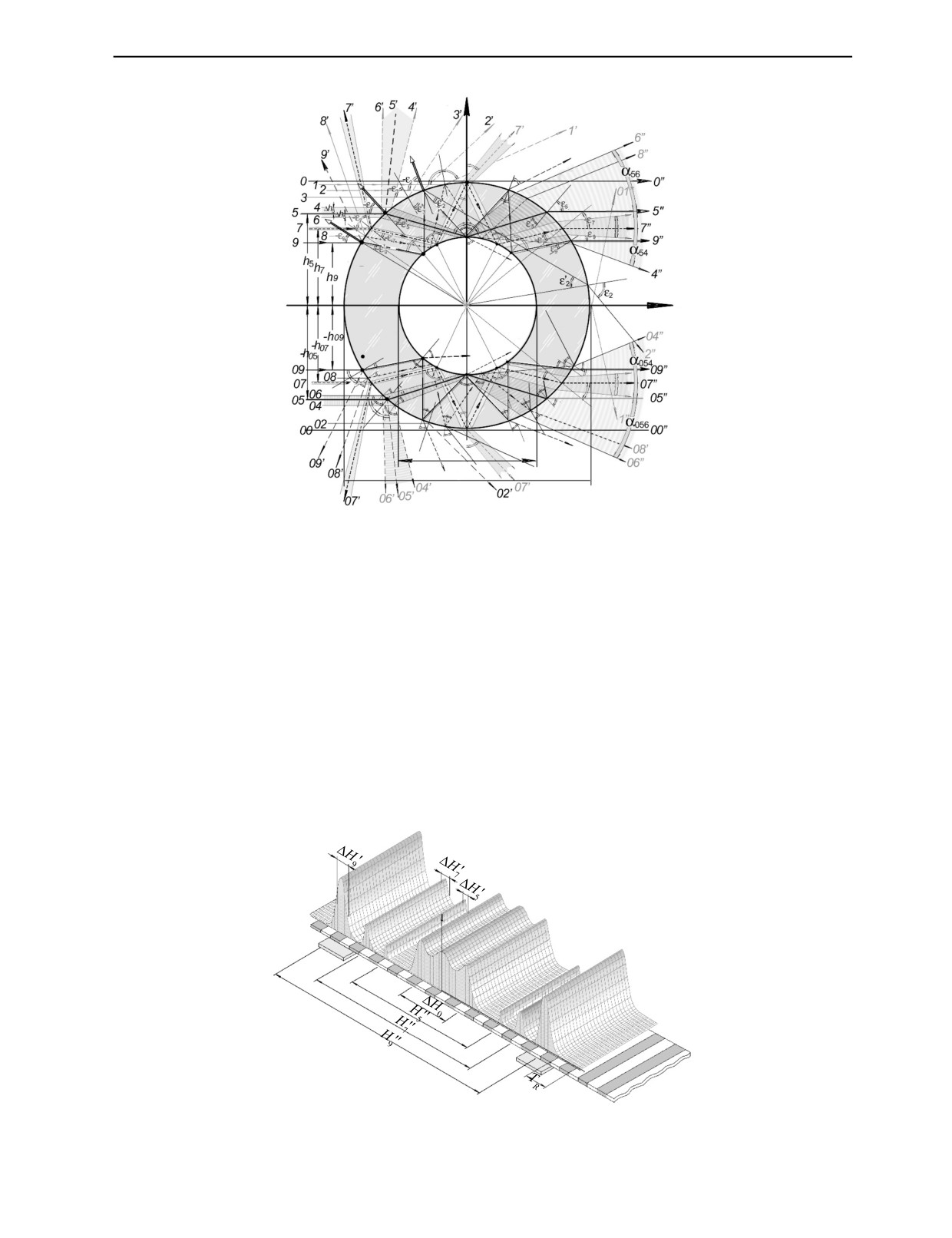
X
O
Y
n1
n2
d0
D0
Рис. 4. Ход лучей через оптический капилляр, формирующих световые метки.
Рассмотрим более подробно принцип формирования информационных световых меток.
Контролируемое оптически прозрачное изделие 3 (см. рис. 3) просвечивается однородным гомо-
центрическим пучком лучей (в частности, плоскопараллельным) большего диаметра, чем наруж-
ный диаметр капилляра D0. Оптическая схема хода лучей L(x) через капилляр показана на рис. 4.
В результате преломления, однократного и многократных отражений от наружной и внутрен-
ней поверхностей трубки происходит потеря гомоцентричности выходящего пучка лучей. В ре-
зультате образуются наборы выходящих лучей разного направления распространения, координат
точек схождения и интенсивности {Li(xi, yi, αi)}, которые выделенные по углу распространения
диафрагмой-фильтром 4 (см. рис. 3) или апертурой объектива. Выходящие лучи образуют в пред-
метной области объектива 5 парные наборы световых реперных меток Мk и М0k (рис. 5). Так, напри-
мер, пара световых меток М5 и М05, соответствует двухкратному преломлению лучей на наружной
поверхности и однократному отражению от внутренней поверхности капилляра.
Рис. 5. Типичное распределение освещенности в световых реперных метках в плоскости изображений для оптического
капилляра.
Дефектоскопия
№ 6
2020
30
В.Е. Махов, А.И. Потапов, В.В. Широбоков, Я.Г. Смородинский
В зависимости от соотношения геометрических размеров трубки (внутреннего диаметра d0,
наружного диаметра D0 и показателя преломления nT) формируются ряд симметрично расположен-
ных пар световых меток разной интенсивности, ширины и плоскости локализации в предметной
области (см. рис. 5). Плоскость локализации световых меток определяется координатой (по оси
OY) пересечения продолжений рассматриваемых выходящих лучей. Эти световые метки соответ-
ствуют двух кратному преломлению на наружной поверхности и несколько кратным отражениям
от наружной и внутренней поверхностей трубки лучей света. Участвующих в формировании вы-
деленных диафрагмой лучи определяют опорные участки поверхности (измерительные в ради-
альном направлении). Каждую пару световых меток (Мk и М0k), полученных путем одинакового
количества преломлений и отражений лучей света в областях наружной и внутренней поверхности
капилляра, будем называть в дальнейшем соответственными, отмечая этот факт дополнительным
нуль индексом в их обозначении, например H′k и H′0k.
При осевом наблюдении указанного пучка лучей (см. рис. 4) параметры капилляра связаны
следующей системой уравнений:
H
H
k
k
cosαk
=
,
sinε'
=
,
k
(k = 1, 2, 3),
(3)
D
n
D
0
T
0
α
α
k
k
d
sin
=
D
−d
tgε'
,
(4)
0
0
0
k
k
k
где nT — показатель преломления трубки, βo.s. — линейное увеличение оптической системы 4,
H′k — размер изображений световых меток на поверхности ГР-преобразователя.
Положение каждой световой метки определяет фазу сигнала φk:
∆ϕ
k
H'
=β
⋅ H
=
T
+nT
,
(5)
k
o.s.
k
R
R
2π
где βo.s. — линейное увеличение оптической системы.
Выходящие лучи строят другие пары изображений линейных световых реперных меток
{M'}m
- {M'
}m
в плоскости ГР преобразователя 5.
k
k=1
0k
k=1
Зависимость расстояний между соответственными световыми метками H′ и H′
связано с кон-
k
0k
тролируемыми параметрами капилляра (D0, d0, nT) системой ортогональных уравнений (3) и (4),
что позволяет осуществлять их одновременный технологический контроль с точностью более, чем
10-2 мкм (для D0, d0) и более, чем 10-5 (для показателя преломления nT ).
В силу технологических особенностей процесса получения капилляров отношение
D0/d0 = const, nT = const. Поэтому на практике нет необходимости осуществлять одновременный
контроль всех параметров капилляра (D0, d0, nT). Практический интерес представляет контроль
внутреннего диаметра d0, который до настоящего времени контролировать в технологическом
процессе представляется весьма затруднительным. При этом все же приходится учитывать воз-
можный разброс параметров D0, nT, а также несоосность внутренней и наружных цилиндриче-
ских поверхностей и отклонение формы от цилиндра, а также возможный градиент показателя
преломления nT.
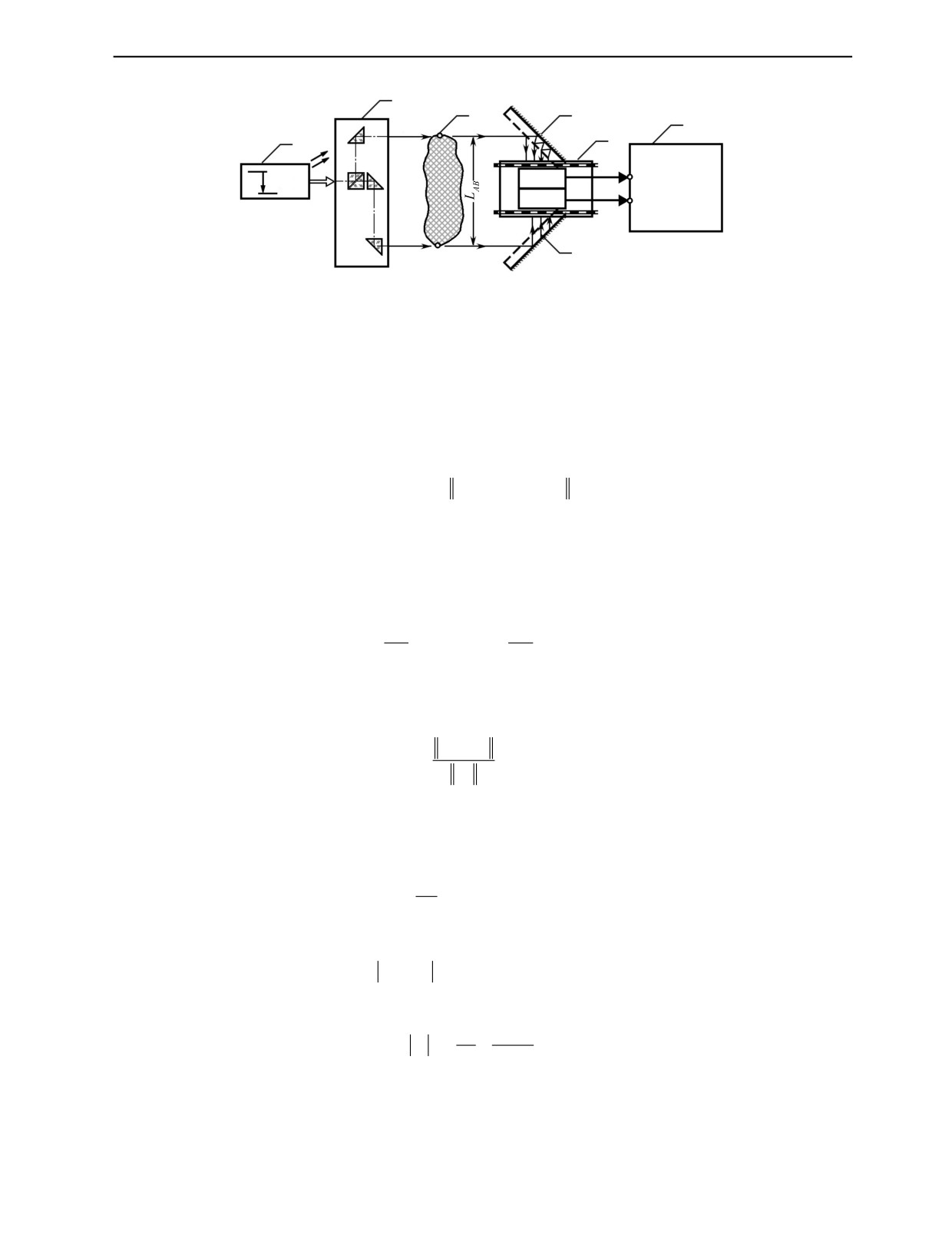
Аналогичную оптическую схему можно использовать для определения геометрического раз-
мера непрозрачных объектов, в том числе имеющих зеркально отражающие боковые поверхности.
Возможный вариант такой схемы, который может быть использован для контроля высокоточных
цилиндрических плунжеров, представлен на рис. 6. Как и в измерительной схеме прозрачных ка-
пилляров (см. рис. 3), объект должен располагаться так, чтобы измеряемый размер был перпенди-
кулярен освещающим лучам L1 и L2 и при своем перемещении перекрывался ими. В отличие от
рассмотренных ранее схемах (см. рис. 2, 3) были дополнительно использованы двойные зеркала 4′
и 4'', формирующие периодическую структуру границ теневого изображения плунжеров и лучей
дифракции на поверхности ГР-преобразователя.
В представленной схеме изменение размера между границами контролируемого объекта 3 при-
водит к смещению периодической яркостной структуры, которая формируется зеркалами 4′ и 4'', на
поверхности растрового модулятора 5. Это обеспечивает пропорциональное изменение разности
фаз ∆φ в зависимости от контролируемого размера LAB, в то время как перемещение объекта как
целое дает нулевое изменение ∆φ.
На основе рассмотренных схем могут быть также построены многоканальные измерительные
схемы, которые дополняются наборами из п фотоприемников {F1,…Fn} и соответствующим им
Дефектоскопия
№ 6
2020
Принципы построения измерительных схем технологического контроля
31
2
3
4′
6
L1
A
L'
5
1
1
F1
G
∆φ
L0
F2
L2
L'
2
4′′
B
Рис. 6. Схема контроля непрозрачных объектов:
1 — лазер, 2 — осветительная система, 3 — контролируемый объект, 4′ и 4′′ — поворотные зеркла, 5 — система растр-регистратор,
6 — фазовый детектор.
набором фазовых детекторов {∆φij}, что позволяет проводить контроль формы объекта, аналог ме-
тодов фотограмметрии [19].
Двухточечная схема. Распределение интенсивности в S(r) имеет вид периодического распре-
деления световой энергии в области (Е) [20]: S(r) ↔ S(r + Ts) (знак ↔ используется для реального
случая в смысле минимума нормы структуры (подобия):
N
s
=
min
S r)−
S(r+T
S
)
dr
(6)
r∈E
∫
0
E
0
Измеряемая информация, связанная с контролируемым параметром, содержится как в периоде
TS (как абсолютном значении величины периода |TS|), так и его ориентации по отношению к вы-
бранной системе координат XOY. Измерение осуществляется по разности фаз ∆12φ двух периодиче-
ских сигналов u1(t) и u2(t), полученных от ГР-преобразования S(r) (4) по областям E1⊂ E0 и E2⊂E0
с координатами:
1
1
z
=
xdr,
z
=
ydr,
(i = 1, 2).
(7)
xi
∫
yi
∫
E
E
xi E
i
yi E
i
Очевидно, что максимальная амплитуда регистрируемых сигналов соответствует выбору разме-
ров областей (E1) и (E2) кратному ТR в направлении периода растра с одной стороны, с другой —
выбору ТR, близкому к измеряемому периоду ТS:
T
-
T
S
R
<<1.
(8)
TR
Фазы сигналов u1(t) и u2(t) определяются начальной пространственной фазой растра R(r,0) по
отношению к началу координат XOY, периодом растра ТR, а также положением областей E1(zx1, zy1)
и E2(zx2, zy2). В то время как разность фаз ∆12φ за время наблюдения T, формирующего более одного
периода сигналов u1(t) и u2(t):
2π
∆ϕ
∆ϕ,
u t)
≅
u
(t
− ∆ϕ),
12
1
2
(8)
p
t
⊂(T
)
определяется только значением угла их взаимного наклона
∆a =
E
1
−E
2
cosα ,
α = ∠(gradS(r),E
1
E
2
)
(9)
и соотношением периодов ТR и TS, из которого при измерении ∆φ определяется Ts:
-
1
1
∆ϕ
12
T
s
=
-
(10)
T
2π∆a
R
Для более точного определения периода S(r) необходимо также определять ориентацию θ
периодической структуры S(r). Например, по разности фаз сигналов u3(t) и u4(t), полученных от
S(r) по двум дополнительным областям E3 ⊂ E0, E4 ⊂ E0 с центрами тяжести (zx3, zy3) и (zx4, zy4)
ориентированных под углом
β = ∠(E
E
,OY ) :
3
4
Дефектоскопия
№ 6
2020
32
В.Е. Махов, А.И. Потапов, В.В. Широбоков, Я.Г. Смородинский
T
∆ϕ
s
34
θ=β+arctg
,
α = θ-∠(E
E
),
(11)
1
2
2π∆b
где
∆b =
E
3
−E
4
cosβ .
Таким образом, для осуществления полного контроля параметров объекта, связанных с величи-
ной и наклоном TS, необходимо ГР-преобразование и регистрацию осуществлять минимум по трем
областям, оптимально координаты расположения которых образуют равносторонний прямоуголь-
ный треугольник.
Диапазон измерения периода |TS| - DT и ориентации структуры S(r) - D0 определяется из усло-
вия их однозначной связи с измеренной разностью фаз ∆φ =[0, π]:
T
S
T
S
D
T
=
,
D
=
arctg
(12)
ϑ
2∆a
−
T
S
2∆b
При этом чувствительность и точность измерения периода полос δТS будет определяться сле-
дующим выражением:
2
2
T
T
∆ϕ
T
S
S
S
δT
=
δT
+
δ∆a
+
δ∆ϕ
(13)
S
R
T
2π∆a
2π∆a
R
Как можно видеть из (13), погрешность измерения |ТS| более, чем на порядок меньше по-
грешности измерения ∆φ. Если взять реальные параметры для некоторой измерительной схемы:
|ТR| = 2·10-3м, ∆a = 10-2 м, получим оценку относительной чувствительности измерения периода
яркостной структуры: δТR / |TS| = 3·10-5.
Большие информационные возможности для построения схем технологического контроля
имеют методы интерферометрии, голографической и спекл-интерферометрии [21, 22], которые
связаны с их высокой чувствительностью и информативностью в пространственной области (ГР-
метод информативен также по времени). Контролируемые параметры объекта выражаются через
структуру волнового фронта, полученную в результате интерференции: частота или период по-
лос; фаза и ориентация полос; контраст; плоскость локализации полос [7]. Однако практическое
применение этих методов наталкивается на ряд трудностей, связанных с той или иной сово-
купностью их следующих недостатков: чувствительность к механической нестабильности реги-
стрирующей схемы; малым диапазоном измерения; низкой точностью определения отдельных
проекций деформаций; трудоемкость процесса контроля и трудностью его автоматизации.
В то же время разрабатываются новые принципы регистрации волнового фронта (светового
поля), которые реализуется цифровыми камерами светового поля
[12], обеспечивая контроль
геометрических параметров объемных изделий [5]. Корреляция волновых фронтов (морфоло-
гический анализ слоев изображения Im(z1, Dz1) и Im(z2, Dz2)) обеспечивает новые возможности
контроля формы и микрорельефа поверхности изделий [13]. Учитывая низкие требования к ме-
ханической стабильности к объекту контроля, данный способ обеспечивает не только высокую
точность контроля, но и возможность проведения контроля материалов и изделий в технологи-
ческих условиях [23].
ДОПОЛНИТЕЛЬНЫЕ ВОЗМОЖНОСТИ ФАЗОВЫХ ИЗМЕРЕНИЙ
Многоточечная схема. Растровый метод, реализующий принцип гетеродинного в плане полу-
чения и анализа динамических сигналов, позволяет расширить возможности интерферометриче-
ских методов, в некоторой степени устраняя ряд их недостатков за счет обеспечения возможности
выбора регистрирующих схем. В частности, гетеродинно-растровый (ГР) метод обеспечивает воз-
можность высокоточной расшифровку интерферограмм, которая, как известно, может быть реа-
лизована только в схемах гетеродинной голографической интерферометрии (интерференция двух
пучков света со сдвинутыми оптическими частотами) [9], которые дают динамическую картину
интерференции. Расширение диапазона измерения и разделение отдельных проекций деформаций
достигается выбором соответствующих схем регистрации [7] и конструктивными особенностями
устройств расшифровки [16]. Например, выделение проекций деформации реализуется в схемах
с одним опорным пучком, при этом повышение точности и чувствительности их определения до-
стигается использованием ГР-метода обработки полученных интерферограмм.
Дефектоскопия
№ 6
2020
Принципы построения измерительных схем технологического контроля
33
1
а
б
X
X
2
5
3′
1
8
3′′
8
L
0
A1
G
A2
L0
H2
H1
s′
s
Z
Z
Y
Y
в
г
3′′
2
3′′
1
2
6
1
6
G
G
L0
L0
H1
5
4
7
A2
A1
8
H4
Рис. 7. Схемы регистрации деформаций диффузно отражающих объектов методом двух экспозиций:
а — спекл-фотография касательных деформаций с маскированной апертурой (H1); б — голограмма во встречных пучках для нормаль-
ных деформаций (H2); в — спекл-интерферограмма касательных деформаций с голограммы H2; г — спекл-интерферограмма нормаль-
ных деформаций со спекл-фотографии Н1. 1 — лазер; 2 — телескопический расширитель; 3 — объект контроля; 4 — объектив;
5 — диафрагма; 6 — полупрозрачное зеркало; 7 — экран; 8 — КР-фотопластинка (квадратичный регистратор).
Варианты схем регистрации деформаций методами голографической, спекл фотограмм и спекл
интерферометрии представлены на рис. 7. Для понимания их возможностей и характеристик про-
ведем анализ указанных схем.
Для определения касательных деформаций поверхности диффузно отражающих объектов
по методам двух экспозиций оптимальной является схема регистрации спекл-фотографии H1
(рис. 7а), обладающая невысокими чувствительностью и требованиям к механической стабиль-
ности системы регистрации.
Для повышения дифракционной эффективности фотопластинки H1 используется маскирован-
ная апертура 5, состоящая из двух малых отверстий (d), расположенных диаметрально перед объ-
ективом в направлении интересуемой деформации на расстоянии hd. В результате при регистрации
спекл-интерферограмм (фотографии) будут получены спеклы с характерным размером bs=1,22 ×
× s′λ/d, модулированные высокочастотными интерференционными полосами с расстояниями меж-
ду ними s′λ/2hd. Между двумя экспозициями соответствующих двум состояниям контролируемого
изделия квадратичный регистратор (КР, например, фотопластинка) Н1 с целью расширения диа-
пазона измерения, реализуемого на стадии расшифровки, смещается на некоторую величину cg в
своей плоскости в известном направлении.
Для выделенной регистрации нормальных к поверхности образца деформаций наиболее под-
ходит схема регистрации голограммы Н2 во встречных пучках (рис. 7б). С полученной голограммы
Н2 можно в дальнейшем записать спекл-интерферограмму для определения касательных дефор-
маций со смещением С0—H3 (рис. 7в) или спекл-интерферограмму для определения нормальных
деформаций H4 (рис. 7г).
Полученные интерферограммы могут быть впоследствии обработаны, в том числе ГР-методом.
При этом постоянная составляющая смещения объекта С и введенное смещение КР С0 (H1, H3)
компенсируются сдвигом в пространстве изображений (Сh = С + С0 + δС) соответственных то-
чек А 1 и А2, например, с помощью двухлучевого интерферометра сдвига [16], который по срав-
нению с известной сэндвич-интерферометрией [7] строит изображения А′1 и А′2 — в первом, А′′ и
1
А′′ — во втором оптических каналах. Сдвиг соответственных точек (как в плоскости XOY, так и по
2
Дефектоскопия
№ 6
2020
34
В.Е. Махов, А.И. Потапов, В.В. Широбоков, Я.Г. Смородинский
оси OZ) осуществляется оптическими элементами в интерферометре [16] (например, синхронным
наклоном двух плоскопараллельных пластинок), который должен обеспечивать период картины
интерференции (КИ) — ТS(х, у) изображений соответственных точек А′1 и А′′ (определяется вели-
2
чиной δС) близким к периоду ГР-преобразования — ТR, в то время как период интерференции от
А′′ и А′2 не будет разрешаться регистратором.
1
Близость значений TS и ТR необходимо обеспечить в диапазоне ГР-преобразования для иссле-
дуемой области Ет поверхности изделия. В отличие от гетеродинных схем обработки, в которых
используется сдвиг оптической частоты света в одном из каналов интерферометра [10], схемы с
ГР-преобразованием в плоскости локализации полос КИ значительно проще и позволяют более
эффективно с той же точностью измерять поля смещения и деформаций.
Смещение интерферирующих точек, сдвига оптической частоты в каналах интерференции,
ГР-преобразование картины интерференции открывает новые возможности определения поля де-
формаций поверхности. На рис. 8 представлена структурная схема для определения поля смеще-
ний регистрируемых точек поверхности L(x, у), (х, у) ∈ Ет с точностью до некоторой постоянной
для всей области величины — Сp смещения изображений в интерферометре 4 путем определения
периода TS и угла наклона полос КИ. Тонкий луч лазера 1 освещает интерферограмму 3 в обла-
сти А(х, у), содержащей наборы соответственных точек A1 и А2. Интерферометр 4 с устройством
сдвига изображений 5 обеспечивает необходимый период КИ от изображений А′′ и А′2 в плоскости
1
ГР-преобразователя 6, которая регистрируется парой фотоприемников 7 и детектируется фазовым
детектором 8.
а
3
4
6
7
8
X
X
X′
1
A′1, A′2
A1
A′
Cp
1
A′′
G
∆φ Lx
1
A′
L
A′′, A′′
2
0
1
2
A2
A′′
2
Z
Z
Z′
Y
5
Y
Y′
C
p
4
6
б
2
7
8
1
X
A
A′1, A′2
LA
В′1, В′2
G
LB B
∆φ
A′′, A′′
L
1
2
0
В′′, В′′
Z
1
2
5
Cp
Y
в
X
4
6
2
7
8
1
L
A
A
A′1, A′2, В′1, В′2,
LB B
C′1, C′2
G
∆φ
A′′, A′′, В′′, В′′,
L
0
LC C
1
2
1
2
C′′, C′′
1
2
Z
9
5
C
г
Y
p
A′1
p1ω2
LA
A′
A′′
2
1
p1
B
A′′
u1 = uA+ u2
B′
2
p1ω2
1
LB
B′2
B′′
1
p2
p2ω1
C
B′′
u2 = u2B
+ u2
C′
2
1
LC
C′2
C′′
p
ω2
1
2
C′′
2
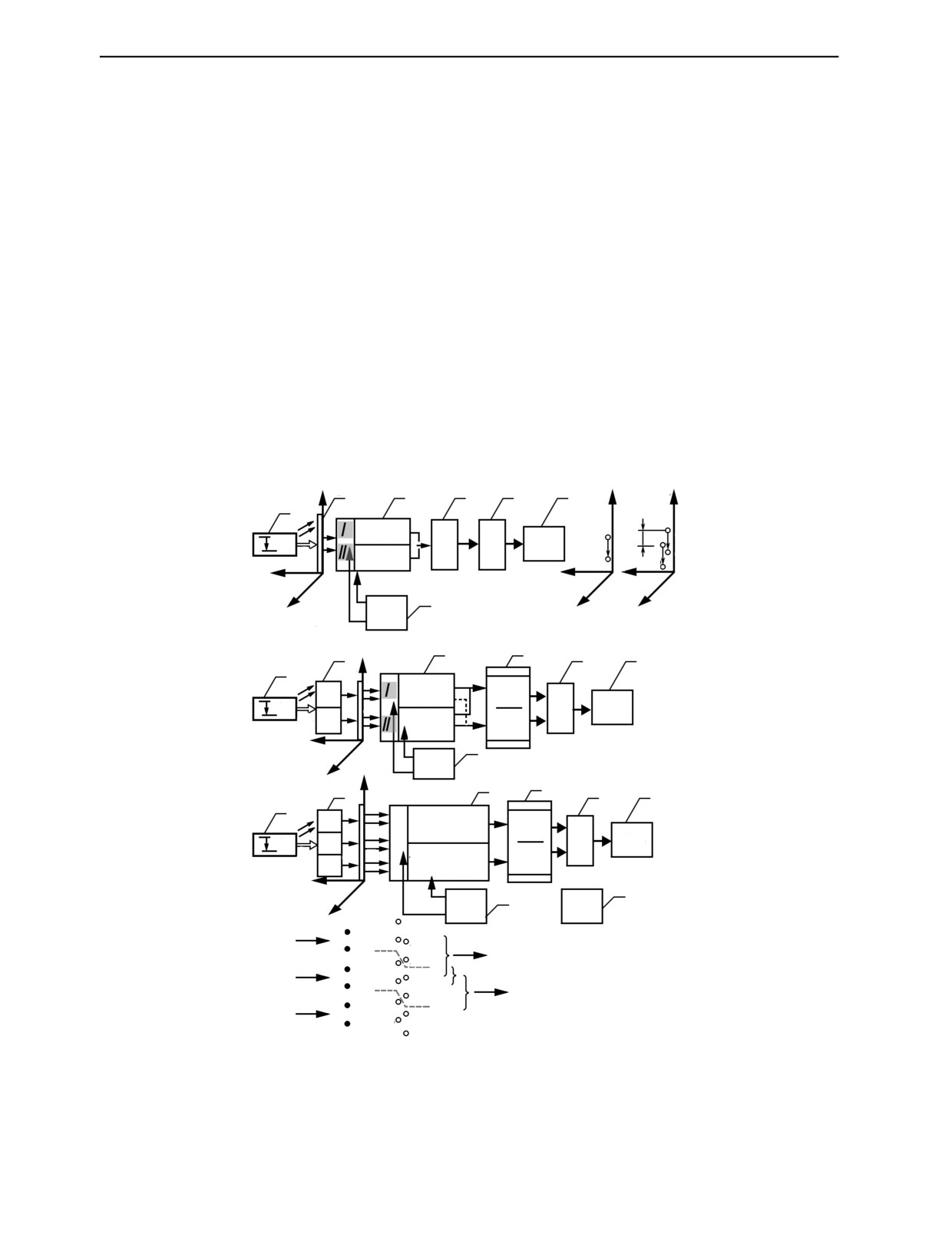
Рис. 8. Схема расшифровки интерферограмм ГР-методом:
а — измерение поля смещений; б — измерение первой производной от вектора смещений; в — измерение второй производной от век-
тора смещений; г — схема освещения соответственных точек в схеме измерения второй производной вектора смещений: 1 — лазер;
2 — устройство освещения; 3 — интерферограмма; 4 — двух лучевой интерферометр; 5 — устройство сдвига изображений в интерфе-
рометре; 6 — ГР преобразователь; 7 — регистратор; 8 — фазовый детектор; 9 — устройство сдвига частоты света.
Дефектоскопия
№ 6
2020
Принципы построения измерительных схем технологического контроля
35
На рис. 8б представлена схема, которая позволяет непосредственно связать фазовые измере-
ния с полем деформаций поверхности объекта, например εx= дL(x, у)/дх. В этом случае следует
использовать два тонких луча LA и LB, которые освещают две области на интерферограмме А(x, y)
и В(x+∆x,y), содержащие наборы соответственных точек A1, А2 и B1 и B2. Центры освещенных об-
ластей расположены на расстоянии ∆x вдоль выбранного направления (OX), соответствующие ко-
ординате дифференцирования поля смещений L(x, у). Картины интерференции от соответственных
точек A′′, A′2 и B′′, B′2, построенных в I-м и II-м каналах интерферометра, соответственно регистри-
1
1
руются 7 раздельно (напр., разделение по поляризации) и определяются две разности фаз δφ1, δφ2,
разность которых δΦ = δφ1 - δφ2 соответствует деформации, вычисленной в конечных разностях.
Можно непосредственно регистрировать два сигнала от A′′, A′
и B′′, B′
по двум аппретурам Е1 и Е2,
1
2
1
2
разность фаз выходных сигналов которых также определяет деформацию. При таких измерени-
ях точность по сравнению с численным дифференцированием поля смещений с 30 % возрастает
до 3—5 %.
Обычно при исследовании механико-прочностных свойств материалов и изделий возникают
трудности определения с достаточной точностью вторых производных от поля смещений, напри-
мер, [д2L(x, у)]/дх2 и д2L(x, у)/дхду, которые определяют поле напряжений. Непосредственная об-
работка результатов измерения смещений L(x, у) будет давать еще большую погрешность. Как и в
случае определения первой производной, ГР-метод позволяет существенно повысить точность и
автоматизировать процесс измерения.
Структурная оптическая схема измерений напряжений представлена на рис. 8в. В этом случае
интерферограмма 3 освещает тремя тонкими лучами LA, LB и LC (рис. 4г) три области А, В и С, со-
держащие наборы соответственных точек А1, А2; В1, В2; С1, С2 и смещенных относительно друг
друга на ∆x и ∆y:
А(х - ∆х,у),В(х,у),С(х+∆x,у) — для измерения d2L/dx2 в точке (х, у);
А(х+ ∆х,у),В(х,у),С(х,у+∆у) — для измерения d2L/dxdy в точке (х, у).
Пучок лучей LA имеет линейную поляризацию P1 с оптической частотой ω1; пучок лучей
LB=L′B+L′′ — линейную поляризацию P1(L′′) с оптической частотой ω2 и ортогональную линейную
B
B
поляризацию Р2 (L′′) с оптической частотой ω1; пучок лучей LC — линейную поляризацию P2 с оп-
B
тической частотой ω2. Двух лучевой интерферометр сдвига строит по два изображения каждой из
соответственных точек в 1-м A′1, А′2, B′1, В′2, C′1, С′2 и 11-м A1′′, А′, B′′, В′′, C′′, C′′
каналах, смещенных
2
1
2
1
2
относительно своего исходного положения устройством сдвига изображения 5, которое компен-
сирует вектор смещения КР — С0 и объекта — С, причем частота света во втором канале интер-
ферометра смещается на частоту +Ω устройством сдвига частоты 9 для обоих типов поляризации.
Альтернативным смещению частоты на +Ω является ГР-преобразование в плоскости локализации
картины интерференции (КИ) от соответственных точек (рис. 8г) с поляризацией P1 - (A′′1, A′2),
(B′′, В′2); P2 - (B′′, B′′), (C′′, C′2) (КИ от соответственных точек с P1 (А′1, А′′), (B′1, В′′), а также
1
1
2
1
2
2
Р2 - (В′1,В′′), (С′1,С′′) имеет высокую пространственную частоту, которая не регистрируется).
2
2
Информационный выходной сигнал с поляризацией P1 от соответственных точек A′′ и A′2:
1
A
A
u t)
=u
[1+cos(Ωt + ϕ
)],
(14)
1
0
A
от точек B′′ и В′
1
2
B
B
u t)
=u
[1+cos((∆ω + Ω)t+ϕ
)],
(15)
1
0
B
с поляризацией Р2 от соответственных точек B′′ и В′2:
1
B
B
u t)
=u
[1+cos(Ωt + ϕ
)],
(16)
2
0
B
от точек C′′ и С′
1
2
C
C
u t)
=u
[1+cos((∆ω + Ω)t+ϕ
)].
(17)
1
0
C
Суперпозиция сигналов с поляризацией Р1 при u0A=U0B:
∆ω ϕ
+ϕ
∆ω ϕ
−ϕ
A
B
B
A
u
=
2u
1+cos
Ω+
t
+
cos
+
,
(18)
1
0
2
2
2
2
с поляризацией Р2 при u0A = U0B
Дефектоскопия
№ 6
2020
36
В.Е. Махов, А.И. Потапов, В.В. Широбоков, Я.Г. Смородинский
∆ω ϕ
+ϕ
∆ω ϕ
−ϕ
B
C
C
B
u
=
2u
1+cos
Ω+
t
+
cos
+
(19)
2
0
2
2
2
2
Отсюда видно, что разность фаз низкочастотной составляющей ∆ω/2 сигналов u1(t) и u2(t) про-
порциональна соответствующим вторым производным, записанным в конечных разностях.
Таким образом, принципы построения указанных схем позволяют существенно повысить про-
изводительность и точность контроля, обеспечивая возможности технологического контроля мате-
риалов и изделий.
ПРАКТИЧЕСКАЯ РЕАЛИЗАЦИЯ ФАЗОВЫХ ИЗМЕРЕНИЙ
Как следует из представленной выше математической модели ГР-метода с гетеродинным пре-
образованием информационного поля в сигнал периодический сигнала с фазовой характеристикой,
могут быть использованы следующие способы их реализации.
1. Перемещение структуры информационного поля в плоскости неподвижного фото приемного
устройства (ФП) — гетеродинные методы. В этом случае выходной сигнал описывается следую-
щей зависимостью:
l
u t)
=K∫R r)
a
⋅ S'
(ωt - Ωr - Φ
0
)dr
,
l = 1, 2, …,
(20)
El
где Ra(r) — геометрия фотоприемника.
Часто используют собственную апертуру ФП, например:
r
T
S
R r)
=
circ
,
при
R
=
(21)
a
0
R
2
0
Представляет интерес апертура большего размера, имеющей форму периодической структуры
с периодом Ta ≈ TS. Это достигается конструкцией ФП или соответствующей диафрагмой.
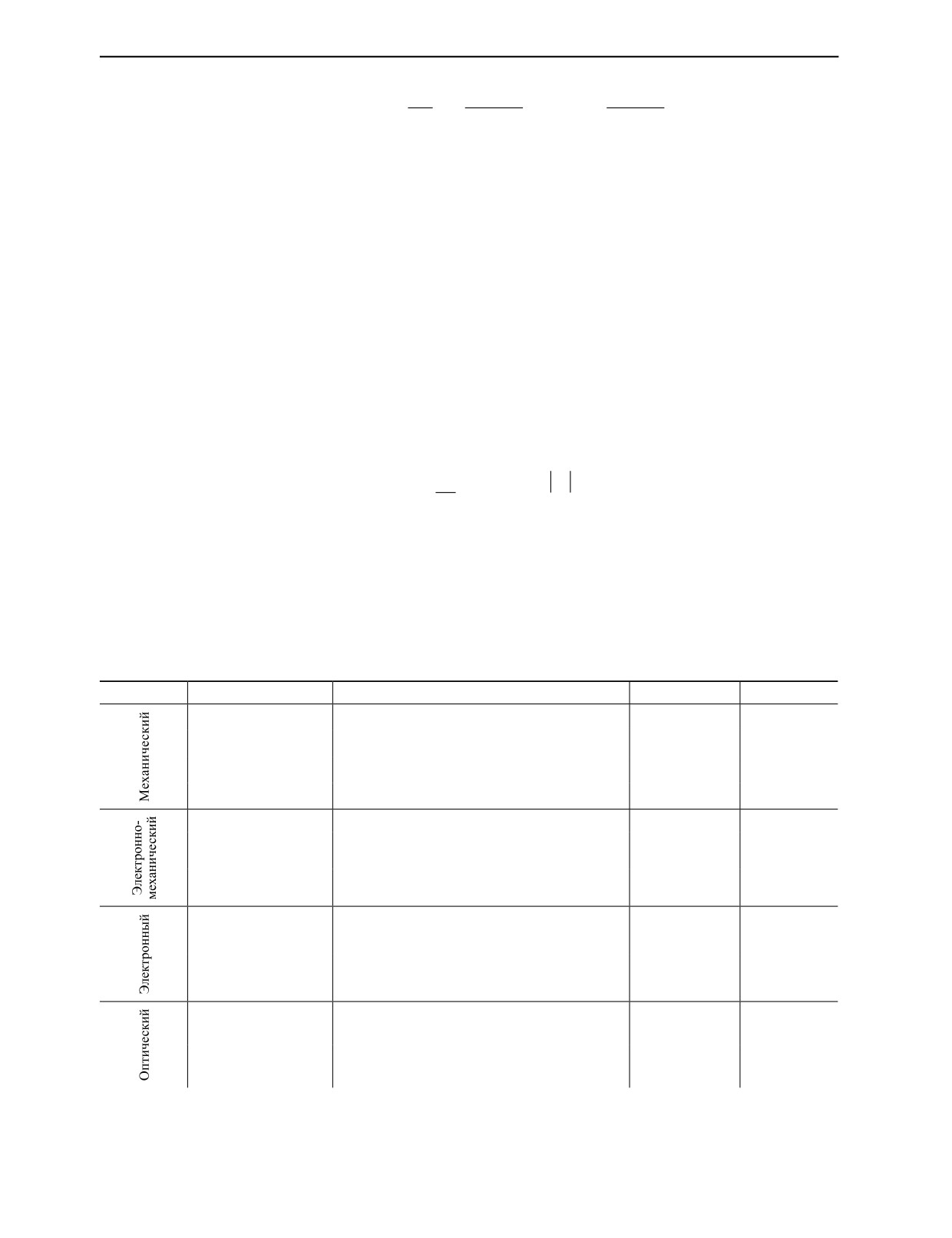
2. Перемещение растрового фильтра в плоскости неподвижного информационного поля
(ГР-преобразование). Элементами преобразования могут служить различные элементы, не-
которые типы которых представлены в табл. 1, среди которых дисковые растровые модуляторы
Таблица
1
Типы устройств для ГР преобразователей
Тип растра
Геометрия
Технология изготовления
Материал
Диапазон, мкм
Дисковый
Литография
Стекло
От 10
Литография
Цилидрический
Фрезерно-механический
Д16Т
От 300 до
4000
Зуборезный
Д16Т
Дисковый
Литография, атомарно-лучевая эпитаксия
Кварц
От 10
Литография, пиролиз поликристаллического
Сапфир
кремния
Цилиндрический
Координатное расположение набора ФП,
От 1500
Д16Т
дискретное перемещение
до 4000
Плоский линейный
Линейка ПЗС, ПЗИ
p-Si
От 80
до 2500
Плоский матричный
Матрица ПЗС, ПЗИ
n-Si
TeO2, PbMoO4,
Плоский
Акустооптический
′1
LiNbO3, SiO2
Плоский
Пленочный
Диэлектрик
От 1 до 1000
эффективно могут применяться только в одноточечных схемах, а цилиндрические в многоточеч-
ных. Цилиндрические системы могут быть линеаризованы в плоскость (цилиндрической оптикой,
Дефектоскопия
№ 6
2020
Принципы построения измерительных схем технологического контроля
37
например, объективом, задний отрезок которого совпадает с осью цилиндра), что делает возмож-
ным их использование для анализа сложных яркостных полей от волновых фронтов с большей
апертурой. Эвольвентный профиль прорезей для механических цилиндрических растров позволя-
ет увеличить угловую апертуру.
3. Сканирование ФП. Гетеродинно-растровое преобразование может осуществляться электрон-
но-механической системой, представляющей собой перемещающийся ФП, выполненный в виде
фоточувствительного слоя, имеющего геометрию растра, или сплошного фоточувствительного
слоя с апертурой диафрагмой в виде растра
1
u t)
=
K ∫ R r)
a
⋅ S r)dr,
(22)
(E
l
′(t))
где (E′) = (El)R(r,t).
l
Выходной сигнал с перемещающейся фоточувствительной структуры может передаваться на не-
подвижную часть устройства бесконтактным трансформатором токосъемником [24]. Сканирование
ФП устройства с ГР-преобразованием можно реализовать путем задания закона движения ФП, на-
пример, для набора ФП равномерно расположенных по окружности с периодом TR, приводимого в
движение шаговым двигателем (время шага τ0, линейный период Т0 дают частоту модуляции f0 =
(T0 - TR)/τ0TR).
4. Многоэлементные ФП, у которых периодически во времени изменяется характеристика пре-
образования свет—сигнал элементов, сигналы с элементов суммируются, а фаза модуляции в про-
странстве распределена по закону Φ(r) = Ωr . Такая система эквивалентна сканированию ФП. Такие
системы реализуются на линейных и матричных ФП типа ПЗС (прибор с зарядовой связью) или
ПЗИ (прибор с заряд-ипжекцией) [25]. Гетеродинно-растровое преобразование при этом достига-
ется получением набора N дискретно заданных m значениями однопериодных выходных сигналов
{u′(k)m
}, l = 1, 2, …, N, которые являются суммой сигналов с групп элементов матричного ФП с
l
k=1
весовыми функциями растра, определяющих временную модуляцию выходных сигналов (по k) [17]:
p
p
u
l
(k
−1)
=
∑
S
ij
R
ij
(k
−1) ,
(23)
m
∆(i,
j)∈E
m
l
S
=
K
S r)dr,
(24)
ij
ij
∫
∆(i,j)
где kij — чувствительность преобразования свет—сигнал (i, j) элемента приемника с апертурой
∆(i, j). Применение матричных ФП в рамках ГР-метода позволяет оперативно выбирать диапазон
измерения, осуществлять измерения геометрических параметров различных структур, имеющих
сложную форму. Использование массива микролинз перед матричным ФП и заданного алгоритма
суммирования сигналов с фотодиодов [26] позволяет осуществить двойное гетеродинирование,
определение смещение поверхности по оси визирования регистратора [26].
5. Оптические растры. Гетеродинно-растровое преобразование реализуется путем перемеще-
ния оптической структуры (акустооптические модуляторы) или может быть реализовано на ос-
нове «стоппинг-эффекта» в тонких диэлектрических волноводах [27], волоконно сопряженных с
набором ФП. Координатно-чувствительный растр с преобразованием координаты в частоту и фазу
сигнала может быть реализован двух лучевой интерференцией с двумя оптическими частотами,
полученных в устройствах на базе эффекта Доплера или эффекта Зеемана [28].
ЗАКЛЮЧЕНИЕ
Модель гетеродинно-растрового преобразования локализованных и периодических яркостных
полей может быть использовано не только в методах контроля на базе голографической и спекл-
интерферометрии, но и в оптических измерительных схемах контроля различных геометрических
и физических параметров изделий. При этом такие системы легко встраиваются в автоматизиро-
ванный технологический процесс или автоматизированную систему мониторинга наблюдаемой
ОЭС обстановки, имеют высокую чувствительность к измеряемому параметру, помехозащищен-
ность к механической нестабильности измерительной системы и широкий яркостной и измери-
тельный динамический диапазон.
Существуют новые средства получения периодических сигналов, где информационным носи-
телем является фазовый параметр. Одним из способов формирования аналога периодической вы-
борки сигнала является алгоритмы обработки сигналов с фотодиодов твердотельных матричных и
Дефектоскопия
№ 6
2020
38
В.Е. Махов, А.И. Потапов, В.В. Широбоков, Я.Г. Смородинский
растровых структур фотоприемников. Перспективным направлением является использование мас-
сивов матричных и растровых структур, который может быть получен, например, путем массива
микролинз, массива оптических капилляров перед матричным фотоприемником — регистратор
светового поля. Использование ЦК светового поля может алгоритмически решить вопрос неопре-
деленности плоскости локализации яркостных полей, обеспечивает дополнительно сканирование
поле зрения.
Перспективным направлением является применение обработки сигналов с растровых структур в
таких важных областях как средствах мониторинга объектов космического мусора. При этом остаются
не до конца решенными вопросы быстродействия таких систем и автоматизации процесса измерений.
Все схемы ГР-контроля позволяют повысить производительность и точность контроля, обеспе-
чивая возможности технологического контроля.
Работа выполнена в рамках государственного задания МИНОБРНАУКИ России (тема
«Диагностика», № АААА-А18-118020690196-3).
СПИСОК ЛИТЕРАТУРЫ
1. Optical Shop Testing / Edited Daniel Malacara. Copyright @ 2007 by Wiley-Interscience A John Wiley
& Sons, Inc., Publication. 861 p.
2. Махов В.Е., Шалдаев С.Е. Высокоточные оптические измерительные системы формы изделий и
инструмента // Вестник Донецкого национального технического университета. 2016. № 4 (4). С. 50—57.
3. Potapov A.I. , Makhov V.E. et al. Smart-Camera-Based Linear Sizing // Russian Journal of
Nondestructive Testing. 2019. V. 55. No. 7. P. 524—532. [Потапов А.И., Махов В.Е., Смородинский
Я.Г., Маневич Е.Я. Контроль линейных размеров на база смарт-камеры // Дефектоскопия. 2019. № 7.
С. 37—45. ]
4. Махов В.Е., Потапов А.И. Использование алгоритмов вейвлет анализа для построения оптиче-
ских измерительных систем // Контроль. Диагностика. № 1 (175). 2013. С. 12—21.
5. Махов В.Е., Потапов А.И., Шалдаев С.Е. Контроль геометрических параметров изделий методом
светового поля // Контроль. Диагностика. 2017. № 7. С. 12—24.
6. Bok Yunsu, Jeon Hae-Gon, Kweon In So. Geometric Calibration of Micro-Lens-Based Light-Field
Cameras Using Line Features // European Conference on Computer Vision (ECCV), Sep 2014. Springer
International Publishing. P. 47—61.
7. Вест Ч. Голографическая интерферометрия / Пер. с англ. М.: Мир, 1982. 504 с.
8. Мирошников М.М. Теоретические основы оптико-электронных приборов / Учебн. пособие для
вузов. 2-е изд. Перераб. и доп. М.: Машиностроение, Ленингр. Отд-ние, 1983. 696 с.
9. Dandliker R. Heterodune holocraphic interferometru / Progress in Optik. Ed. E.Wolf. 1980. V. 17.
P. 3—84.
10. Махов В.Е., Потапов А.И. Гетеродинно-растровый метод контроля качества изделий // АН СССР.
Дефектоскопия. 1989. № 10. С. 68—84.
11. Гаврилов Г.А., Сотников Г.Ю. Разрешающая способность преобразователей оптического изобра-
жения на основе ПЗС / В кн.: Оптическая обработка изображений. Л.: Наука, 1985. С. 90—103.
12. Kučera J. Computational photography of light-field camera and application to panoramic photography
(Prague). 2014. 98 p.
13. Makhov V.E., Sytko I.I. Shape and Relief Evaluation Using the Light Field Camera // IOP Conference
Series: Earth and Environmental Science. 2018. С. 022020.
14. Махов В.Е., Потапов А.И. Способ определения температурной деформации образца и устрой-
ство для его осуществления. А.с. №1392354. 13.04.88. Бюллетень № 16.
15. Методы и приборы для точных дилатометрических исследований материалов в широком диа-
пазоне температур. (Третье Всесоюзное совещание, тезисы докладов). Л.: Госкомитет СССР по стан-
дартам, 1984. 151 с.
16. Makhov V.E., Potapov A.I. et al. Using Two-Beam Interferometry in Surface Deformation Monitoring
Systems // Russian Journal of Nondestructive Testing. 2019. V. 55. No. 8. P. 622—629. [Махов В.Е., Пота-
пов А.И., Смородинский Я.Г., Маневич Е.Я. Использование двухлучевой интерферометрии в системах
контроля деформации поверхностей // Дефектоскопия. 2019. № 8. С. 59—66.]
17. Махов В.Е., Потапов А.И. Анализ эффективности оптического метода контроля капилляров.
Теоретические основы оптического контроля капилляров // Справочник. Инженерный журнал (с при-
ложением). 2013. № 7 (196). С. 48—56.
18. Махов В.Е., Певзнер Б.З. Влияние типа структуры на свойства гетерогенных материалов //
Известия АН СССР. Неорганические материалы. 1985. № 9. С. 1599—1607.
19. Грузман И.С., Киричук В.С., Косых В.П. и др. Цифровая обработка изображений в информацион-
ных системах / Учебное пособие. Новосибирск: Изд-во НГТУ, 2000. 168 с.
20. Махов В. Использование непрерывного вейвлет-преобразования в интерферометрии
//
Компоненты и технологии. 2015. № 11 (172). С. 132—136.
Дефектоскопия
№ 6
2020
Принципы построения измерительных схем технологического контроля
39
21. Островский Ю.И., Бутусов М.М., Островская Г.В. Голографическая интерферометрия.
М.: Наука, 1977. 339с.
22. Джоунс Р., Уайкс К. Голографическая и спекл-интерферометрия / Пер. с англ. М.: Мир, 1986.
328 с.
23. Maksarov V.V., Makhov V.E. Method for studying the shape of the cutting tool
Light field recorder // AER-Advances in Engineering Research. V. 1. 2017. P. 452—457.
24. Руднев О.Н., Лебедев В.Г. Повышение точности измерительных систем с вращающимися термо-
приемниками // Измерительная техника. 1975. № 7. С. 63—65.
25. Пресс Ф.П. Формирование видеосигнала на приборах с зарядовой связью. М.: Радио и связь,
1981. 136 с.
26. Махов В., Потапов А., Закутаев А. Принципы работы цифровых камер светового поля с масси-
вом микролинз // Компоненты и технологии. 2018. № 1 (198). С. 14—20.
27. Интегральная оптика / Под ред. Т. Тамира. Пер. с англ. М.: Мир, 1978. 344 с.
28. Дьяконов М.И. Фридрихов С.А. Газовый лазер в магнитном поле // УФН. 1966. Т. 90. Вып. 4.
С. 565—600.
Дефектоскопия
№ 6
2020