Оптические методы
УДК 620.179.118.5
ВЛИЯНИЕ КАЧЕСТВА ИЗОБРАЖЕНИЙ В ОПТИКО-ЭЛЕКТРОННЫХ
СИСТЕМАХ НА ТОЧНОСТЬ ОПРЕДЕЛЕНИЯ ИССЛЕДУЕМЫХ
ПАРАМЕТРОВ ОБЪЕКТОВ
© 2020 г. В.Е. Махов1,*, С.Е. Шалдаев1, А.И. Потапов2,**, Я.Г. Смородинский3,4
1Военно-космическая академия им. А. Ф. Можайского, Россия 197082 Санкт-Петербург,
Ждановская ул.,13
2Санкт-Петербургский горный университет, Россия 199106 Санкт-Петербург,
Васильевский остров, 21 линия, 2
3Институт физики металлов имени М.Н. Михеева УрО РАН, Россия 620108 Екатеринбург,
ул. Софьи Ковалевской, 18
4ФГАОУ ВПО «Уральский федеральный университет имени первого Президента России Б.Н. Ельцина»,
Россия 620002 Екатеринбург, ул. Мира, 19
E-mail: *wmahov@gmail.com; **apot@mail.ru
Поступила в редакцию 03.03.2020; после доработки 14.03.2020
Принята к публикации 24.04.2020
Проведен анализ методов оценки качества изображений в оптико-электронных системах (ОЭС). Исследовано вли-
яние качества и информационной структуры изображения на точность измерения параметров исследуемых объектов.
Проведено сравнение точности измерения для параметров геометрических форм и координат сложных объектов в их
изображениях в зависимости от качества изображений. Указаны пути повышения качества и информативности изобра-
жения в ОЭС. Установлено, что повышение точности в измерительных алгоритмах происходит при повышении качества
изображения, которое достигается увеличения объема выборки получаемых ОЭС кадров изображений, а повышение ка-
чества изображения достигается совместной обработкой серии кадров алгоритмами повышения разрешения и снижения
уровня шума как в однопунктных ОЭС, так и многопозиционных ОЭС на базе нескольких регистраторов с матричным
фотоприемником. Максимальный эффект повышения качества и информативности изображения, обеспечивающих точ-
ность применяемых измерительных алгоритмов, определяется структурой и вариациями пиксельной структуры каждого
кадра изображения в области границ градиента яркости. В условиях однопунктной ОЭС, дающих высокое качество
оптического изображения без факторов шума и вариаций других внешних параметров, оптимальное количество кадров
для совместной обработки не более четырех. В ОЭС на базе регистраторов светового поля максимальное количество
кадров, обеспечивающих повышение качества изображения, определяется количеством пикселей под каждым элементом
массива микролинз. Формирование значимых кадров в регистраторе светового поля может быть получены алгоритмом
сканирования поля зрения или формирования слоев отображаемого пространства. Результаты исследований дают воз-
можность более эффективно проводить оценку технического состояния малоразмерных (удаленных) объектов, в том
числе отечественных космических аппаратов.
Ключевые слова: оптико-электронная система, ОЭС, однопунктная ОЭС, многопозиционная ОЭС, качество изобра-
жения, регистратор светового поля, глубина резко отображаемого пространства, ГРИП, двумерные вариации, сложность
изображения, оценка технического состояния.
DOI: 10.31857/S0130308220070040
ВВЕДЕНИЕ
Изображения контролируемых объектов в оптико-электронной системе (ОЭС) используются
для получения количественных информационных характеристик интересуемых объектов. Дости-
жимая точность и достоверность измерений характеристик объектов зависит от качества получа-
емых изображений, которое определяется свойствами ОЭС, индивидуальными особенностями и
состоянием исследуемого объекта, трактом передачи оптического изображения в ОЭС [1]. С целью
повышения точности и достоверности получаемой информации об объектах контроля в настоящее
время широко используют различные методы повышения качества изображения, в том числе полу-
ченных методом совместной обработки серии изображений, полученных с нескольких ОЭС, или во
временной последовательности изображений, полученных с одной или нескольких ОЭС.
Наряду с методами построения многопозиционных ОЭС известны так же принципы постро-
ения однокамерных гибридных оптических систем, например, цифровых камер (ЦК) светового
поля (СП) [2], регистрирующих координаты и направление хода лучей от поверхности объек-
тов контроля в ОЭС. Такие системы, имеющие один матричный фотоприемник (МФП) и мас-
сив микролинз, расположенных перед ним, можно рассматривать как плоский массив цифровых
камер низкого разрешения, что позволяет определять форму поверхности объекта контроля [3].
Влияние качества изображений в оптико-электронных системах на точность определения...
29
Алгоритм обработки, получаемых с ЦК СП файлов объемного изображения (4D), имеет отличи-
тельную особенность, которая заключается в получении выходного плоского изображения (2D) с
выбранной вариацией набора входящих в ОЭС лучей. Фактически это соответствует изменению
плоскости фокусировки, глубины резко отображаемого пространства (ГРИП), угла визирования
ОЭС. Отличительных особенностей ЦК СП является то, что каждая пиксель синтезируемого
плоского изображения формируется из множества разнесенных в сенсоре МФП пикселей, что
устраняет факторы их взаимного влияния.
На практике часто встает вопрос получения достаточно высокого качества изображений в
значимых фрагментах исследуемых объектов с целью достижения в дальнейшем максимально
точной и достоверной информации об исследуемых характеристиках частей объекта. Обеспе-
чить это можно путем детального анализа структуры ОЭС и задания необходимых режимов по-
лучения изображений. Решение задачи получения необходимого качества и информативности
изображения позволит проводить достоверную оценку качества сложных объектов, например
отечественных космических аппаратов, при воздействии на них космического мусора.
КАЧЕСТВО И ИНФОРМАТИВНОСТЬ ИЗОБРАЖЕНИЯ
В настоящее время существуют различные подходы количественного оценки качества и струк-
турной сложности изображений, основанные, в первую очередь, на теории информации и понятии
энтропии [4] или анализа искажений волнового фронта [5]. Оценить сложность дискретных изо-
бражений можно в сравнении их двумерных вариаций [6]. Распространенной метрической харак-
теристикой изменчивости и сложности одномерной функции f(x) в интересуемой области D[a,b]
является полная вариация. Известны обобщения вариации для функций нескольких переменных
(Витали, Арцела, Фреше, Тонелли и др.). Все они являются вариантом интеграла модуля градиен-
та функции по области своего носителя D. Для реальных функций значения различных вариаций
близки. Каждая из рассмотренных вариаций дает в результате одно значение, в основе которого ле-
жит величина градиента в точке. Обобщив выводы и теоремы разных типов вариаций, Кронрод [7]
показал, что функция нескольких переменных r = (x1, x2,…) должна характеризоваться не одним,
а несколькими независимыми функционалами, определяющих длину границ компонент и число,
которое характеризует и выраженность их локальных экстремумов f(r).
С другой стороны, сложность изображения можно описать фрактальностью [8]. Размер-
ность Минковского — один из способов задания фрактальной размерности ограниченного
множества в метрическом пространстве, которая тесно связана с размерностью Хаусдорфа. На
практике могут быть другие подходы к оценке сложности и информативности изображений,
например, путем определения параметров сегментации [9]. В сегментации методом водораз-
дела рассматривается абсолютная величина градиента изображения в виде топографических
поверхностей.
Наряду с этими методами оценку информативности и анализ структуры изображения можно
реализовать другими математическими методами, например, путем анализа мгновенной простран-
ственной частоты (преобразование Гильберта), разложение по адаптивным базисам (Хуанга), крат-
но масштабный анализ [10]. Так или иначе, количественные методы оценки качества изображения
дают возможность численно оценить структурную сложность изображения и его потенциальную
информационную емкость, произвести его информационную селекцию. Все это позволяет подойти
к выбору оптимальных алгоритмов получения доминантных информационных составляющих ис-
следуемых объектов.
При этом надо иметь в виду, что, определяя качество изображения или его потенциальную
информационную емкость, нужно ориентироваться, в первую очередь, на возможность получе-
ния максимально точно и достоверно интересуемых информационных параметров исследуемого
объекта при воздействии мешающих факторов в широком диапазоне их варьирования (низкий
контраст, шум). Однако подготовка изображения для применения тех или иных измерительных
алгоритмов может потребовать использования дополнительных алгоритмов обработки изобра-
жений [1, 11], которые чаще всего носят деструктивный характер. Полученное ОЭС-изображе-
ние может иметь различное качество по полю зрения ОЭС. С помощью энтропии можно харак-
теризовать гладкость локальных окрестностей. Существует метод адаптивного преобразования
локальных контрастов, в котором за параметр, характеризирующий скользящую окрестность,
используется аналог энтропии. Поэтому на основании меры априорной неопределенности зна-
чений яркостей для элементов изображения в их окрестностях может формироваться функция
преобразования локального контраста [12].
Дефектоскопия
№ 7
2020
30
В.Е. Махов, С.Е. Шалдаев, А.И. Потапов, Я.Г. Смородинский
Самым важным вопросом разработки средств контроля является повышение точности и надеж-
ности полученных данных об исследуемых объектах, регистрируемых ОЭС. Данные измерения
всегда получаются в результате анализа всей пиксельной структуры изображения. Обработка изо-
бражения изменяют его пиксельную структуру. Ряд измерительных алгоритмов строится на основе
графического выделения структуры градиента яркости в изображении [13]. Высокую точность из-
мерения геометрических параметров объектов в изображении обеспечивают интегральные мето-
ды анализа градиента контраста, например, с использованием базиса вейвлета [14], что снижает
требования к локальной пиксельной структуре в изображении и степени локализации (размытию)
градиента яркости на границах интересуемых фрагментов изображения. В некоторых случаях для
определения дефектов поверхности изделий [15], структуры и формы и их границ [16] достаточно
эффективно могут быть использованы алгоритмы анализа выделенных по уровню яркости бинар-
ных кластеров. Форма и координаты бинарных кластеров, обеспечивающих информационное ото-
бражение интересуемых параметров объектов в более узкое информационное поле их численных
параметров, что позволяет получать наглядные и устойчивые результаты контроля в широком диа-
пазоне варьирования неконтролируемых параметров.
Свойства проектирующей оптической системы (ОС) и условия регистрации (аберрации, расфо-
кусировка, механическая нестабильность) вносят различного рода искажения в получаемые ОЭС
изображения. На основе априорных знаний о системе контроля можно повысить качество такого
изображения без потери его информативности.
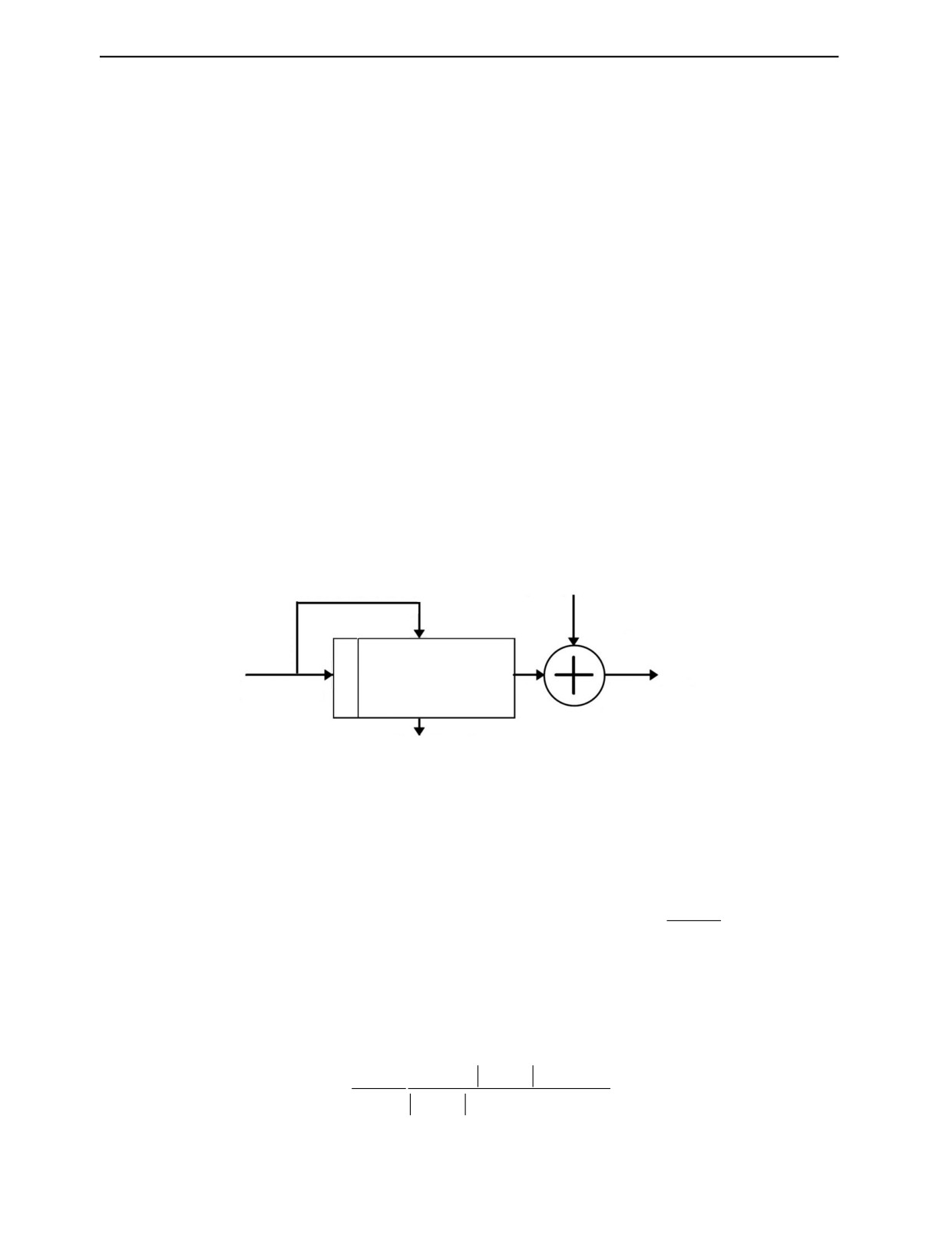
Модель процесса формирования и искажения изображения в ОЭС можно определить следую-
щим образом (рис.1):
Im
dis
(x,
y)
=Ξ x,
y h(x,
y ⊗Im(x,
y)}
+n x,
y),
(1)
где Im(x,y) — исходная яркостная структура объекта; h(x, y) — функция, формирующая изобра-
жение ОЭС; Ξ(x, y) — искажающая функция (нелинейная составляющая); n(x, y) — аддитивный
шум; Imdis(x, y) — результат искажения.
n(x, y)
Ξ
h(x, y)⊗ Im (x, y)
Im (x, y)
Imdis(x, y)
Imh(x, y)
Рис. 1. Модель процесса формирования искаженного изображения ОЭС.
Когда область яркостной структуры объекта Im(x, y) посредством передаточной функции ОС
h(x, y) сворачивается в пиксели изображения Imh(x, y), получаем свертку h(x, y) ⊗ Im(x, y) , которая
называется конволюцией линейного интеграла. Операция обратная свертке в пространственной
области эквивалентна операции деления в частотной области:
∧
N u,v)
h(x, y)⊗ Im(x, y) ⇔ H(u,v)⋅ IM(u,v),
IM u,v)
=
IM u,v)+
,
(2)
H u,v)
где H(u, v), IM(u, v), N(u, v) — фурье-образы функций h(x, y), Im(x, y), n(x, y).
Вычисление IM (u, v) исходного изображения (2) называется инверсной фильтрацией [17]. На
практике она почти не применяется, так как когда H(u, v) принимает близкие к нулю значения, ее
вклад оказывается доминирующим.
Фильтрация Винера (Wiener) позволяет учитывать шум в изображении [17]. Минимум отклоне-
ния достигается в частотной области:
2
∧
1
H u,v)
IM u,v)
=
G u,v),
(3)
2
H u,v)
H u,v)
+
n
S u,v)/
f
S u,v)
где G(u, v) — фурье-образ функций Imh(x, y).
Дефектоскопия
№ 7
2020
Влияние качества изображений в оптико-электронных системах на точность определения...
31
В то же время известен метод сглаживающей фильтрации, называемой Тихоновской регуляри-
зацией [18]:
∧
*
H u,v)
IM u,v)
=
G u,v)
,
(4)
2
2
H u,v)
+λ
P u,v)
где λ — параметр регуляризации, а P(u, v) — фурье-преобразование оператора Лапласа (матри-
цы 3×3).
Этот метод широко используется в программах для обработки астрономических фотографий
(программа «Astra Image»). Недостаток метода — большое время обработка изображения.
Развивается также метод слепой деконволюции, предполагающий, что искажающая функция
рассеяния точки (ФРТ) заранее точно неизвестна. Первоначально выбирается первое приближение
ФРТ, далее по одному из методов делается деконволюция, после чего по некоторым критерием
определяется степень качества, на основании которой уточняется функция ФРТ и итерация повто-
ряется до достижения нужного результата.
Лучший результат может обеспечить нелинейный подход (Ричардосон и Люси) основан на мак-
симальном правдоподобии [19]. Вычисления производятся в пространственной области. При этом
предполагается, что изображение подчиняется распределению Пуассона [20]. Критерий качество
изображения является сохранение резких краев и сглаживание артефактов деконволюции. Записы-
вается это следующим образом:
J(Im)
=
∑
∇ r)
(5)
r
Вычисление такого функционала требует сложной техники оптимизации. Поэтому альтерна-
тивно используется сглаженный функционал:
2
2
J
(Im)
=
∑
∇ r)
+ε
(6)
r
Когда ε стремится к нулю, процесс оптимизации становится более сложным. При достаточно
большом ε, результат оптимизации будет напоминать фильтр Винера с размытием краев [21]. Фор-
мула (6) имеет квадратичный вид, поэтому она не может быть просто вычислена в частотном про-
странстве (Фурье), как это получалось с фильтрами Винера и Тихонова. Поэтому необходим один
из методов пошаговой оптимизации для нахождения приближенного решения, например классиче-
ский метод градиентного спуска.
Градиент сглаженного функционала определяется как
∇Im(r)
GradJ(Im) div
(7)
2
2
∇Im(r)
+ε
Для достижения хорошего результата количество итераций должно быть достаточно большим.
Наиболее сложным случаем является контроль удаленных или малоразмерных объектов, даю-
щих наибольшую вариацию пикселей в структуре изображения. Очевидно, используя имеющиеся
средства однопунктной или много позиционной ОЭС получения пространственно-временной ин-
формации (R3 - t) при выбранных методах ее обработки, необходимо иметь возможность заранее
оценить возможности получения необходимой измерительной информации, ее точность и досто-
верность, в итоге сформулировать требования к методике функционирования ОЭС.
Ввиду значительного числа существующих и перспективных конфигураций ОЭС, в настоя-
щее время не существует системных подходов к их синтезу, нет рекомендации по оптимальному
выбору средств получения, алгоритмов обработки изображений в рамках решаемой задачи. Нет
общей методики построения оптимальных алгоритмов получения информационных параметров
для различных объектов, научного прогнозирования точности и достоверности получаемых ре-
зультатов.
Поэтому в работе ставилась цель провести ряд исследований влияния качества изображения на
точность получаемых информационных параметров объектов, полученных в различных ОЭС. Рас-
смотрены вопросы выбора алгоритма оценки качества изображения, планирования оптимального
качества для решаемой задачи контроля различных объектов с требуемой точностью. Исследованы
Дефектоскопия
№ 7
2020
32
В.Е. Махов, С.Е. Шалдаев, А.И. Потапов, Я.Г. Смородинский
вопросы необходимости и пути повышения качества исходных изображений ОЭС, в том числе во
временной последовательности, которые являются основой для измерений необходимых геометри-
ческих и координатных параметров объектов или их дефектоскопии.
ТЕХНИЧЕСКИЕ И ПРОГРАММНЫЕ СРЕДСТВА В ПРОВЕДЕНИИ ИССЛЕДОВАНИЯ
В качестве ОЭС в работе использована смарт-камера фирмы National Instruments (NI) — NI
1742 [22], оснащенная процессором 533 МГц PowerPC. Сенсор смарт-камеры монохромная ПЗС
матрица разрешением 640×480 Пикс (VGA) (Sony ICX424AL) размером 1/3 дюйма (эффективная
площадь изображения 5,8×4,9 мм, размер пикселя 7,4 мкм2). Использована цифровая окулярная
насадка Levenhuk T300 PLUS: матрица КМОП 1/2'', аппаратное разрешение 2048×1536 Пикс,
размер пикселя 3,2 мкм2, чувствительность 1 В/люкс-с на длине волны 550 нм, время выдерж-
ки 0,244—2000 мс. Использована цифровая окулярная насадка ScopeTek MDCC560 [23]: матри-
ца ПЗС 1/2'' (6,4×4,8 мм), размер пикселя 2,2 мкм2, аппаратное разрешение 2592×1944 Пикс,
динамическая широта 75дБ, длина волны 400—650 нм (с фильтром ИК). Для формирования
скоп Celestron NexStar 4 SE (D = 102 мм, f ʹ = 1325 мм), Sky-Watcher BK MAK90SP (D = 90 мм,
f ʹ = 1250 мм), Celestron C70 Mini Mak (D = 70 мм, fʹ = 750 мм).
Альтернативно для получения изображений был использован регистратор светового поля
(СП) на базе цифровая камеры (ЦК) Lytro ILLUM (версия B5-0036 ILLUM) [24] имеющая сен-
сор КМОП (Aptina MT9F002 14,4 Мпикс, 1/2,3″, эффективная площадь изображения: 6,14×
4,6 мм, размер пикселя 1,4 мкм2). Количество микролинз в массиве 130000 (фокусное расстояние
25 мкм, шаг 13,89 мкм). ЦК СП имела встроенный объектив 9,5—77,8 мм с относительным от-
верстием 1:2. Для обработки файлов СП использовалось оригинальное приложение Lytro Desktop
[25]. Максимальное разрешение ЦК: 2450×1634 пикс.
Для построения алгоритмов обработки и измерений в изображениях использованы алгоритмы
и средства среды разработки приложений на базе графического языка программирования фирмы
National Instruments (NI) — NI LabVIEW [26], использован дополнительный модуль NI Advanced
Signal Proceedings Toolset, включающих функции обработки сигналов на основе объединенного
частотно-временного [27] и вейвлет-анализа [28]. Применяли специализированные функции ра-
боты с изображения драйвера модуля технического зрения — NI IMAQ Vision [29]. Для захвата
кадров изображений в режиме реального времени использовано приложение NI Vision Builder for
Automated Inspection (Vision Builder AI), для построения алгоритма обработки и измерений — при-
ложение NI Vision Assistant.
Обработка одиночных кадров изображений проводилась в программе Astra Image PLUS
Cor Berrevoets) [30], AutoStakkert (author Emil Kraaikamp), PIPP — Planetary Imaging PreProcessor,
ИССЛЕДОВАНИЕ ТОЧНОСТИ ВЫДЕЛЕНИЯ ИНФОРМАЦИОННЫХ ПРИЗНАКОВ
ОЭС со светочувствительными элементами на базе единичных, линейных, матричных фотоди-
одов могут обеспечить получение четырехмерной пространственно-временной информационной
структуры (R3 - t) яркостных полей, которую можно с понижением ее размерности анализировать
известными методами:
L × M × (R1)← L × (R2 - t)← (R3 - t)→ K × (R3) → K × L(R2),
(8)
где M — количество линий профиля изображения (1D), L — количество выборок по глубине
пространства, K — количество временных выборок.
ОЭС с массивом микролинз или иных систем регистрирующих координаты и направления хода
лучей Li(x, y, θ, φ) входящих в ОЭС в каждый момент времени ti [31] система формирует файл СП
(4D), который в каждой экспозиции (ti + Δt) имеет четырехмерную информационную структуру
R4 = LR2. Это обеспечивает получение некоторого количества L слоев плоских изображений L(R2)
[32] по направлению визирования ОЭС (α, β):
(R4 - t) → L × (R2 - t)Σ(θ, φ) →L × K ×(R2) Σ(θ, φ).
(9)
Дефектоскопия
№ 7
2020
Влияние качества изображений в оптико-электронных системах на точность определения...
33
Плоские изображения (R2) из файла данных СП получаются алгоритмами суммирования сиг-
налов с фотодиодов, расположенных под микролинзами [24]. Более полный алгоритм форми-
рования плоского изображения из файла СП описывается на базе четырехмерного преобразо-
вания Фурье [33]. Ввиду этого накладываются существенное ограничение на быстродействие
ОЭС, построенных на базе регистраторов СП. Для обработки информации с целью определения
большинства интересуемых параметров объекта чаще всего используется двухмерный массив
данных (R2), который соответствует дискретной выборки яркостной структуры плоского кадра
изображения полученной однопунктной ОЭС регистрации наблюдаемой сцены. Дополнительная
информация по координате вдоль оси визирования (OZ) может быть получена путем обработки
серии изображений в многопунктных ОЭС [1], корреляцией кадров или слоев изображений, в
том числе полученных от цифровых регистраторов СП (поле градиента яркости, для ЦК СП —
вдоль оси визирования ЦК) [3].
В то же время информационная избыточность многопунктных ОЭС и ОЭС СП может быть ис-
пользована для повышения качества кадра плоского изображения объекта контроля, необходимо-
го для последующего точного выделения его информационных параметров. Основой физического
разрешения и информативности получаемого изображения является размеренность используемой
матрицы фотодиодов регистртора (n×m). Снижение исходного физического возможного качества
изображения приводит к снижению измерительной точности определения параметров объекта.
Исследования точности и достоверности получения параметров интересуемого объекта в изо-
бражении заданного качества проводились путем измерения геометрического контура объекта
стандартными алгоритмами поиска границ градиента яркости функциями модуля NI IMAQ-Vision
[29]. На первом этапе использованы алгоритмы поиска и определения параметров линий границ
объекта yi = tg(α).xi + b в выбранных фрагментах их линейности алгоритмами: «Edge Detector»,
«Find Straight Edge», «Adv. Straight Edge». Измерительная точность этих функций определялась
вариациями найденных точек вдоль линии границ (Straightness, Average SNR) и сравнением резуль-
тата с истинными значениями формы границ исследуемого объекта в ОЭС с учетом калибровки
оптической системы по полю и глубине пространства (определение линейного увеличения оптиче-
ской системы) [25, 34]. Для более точного измерения координат точек градиента яркости в линиях
профиля изображения был использован алгоритм на базе непрерывного вейвлет преобразования
(НВП) для распределения освещенности, которые позволяют учитывать влияние размытия и пик-
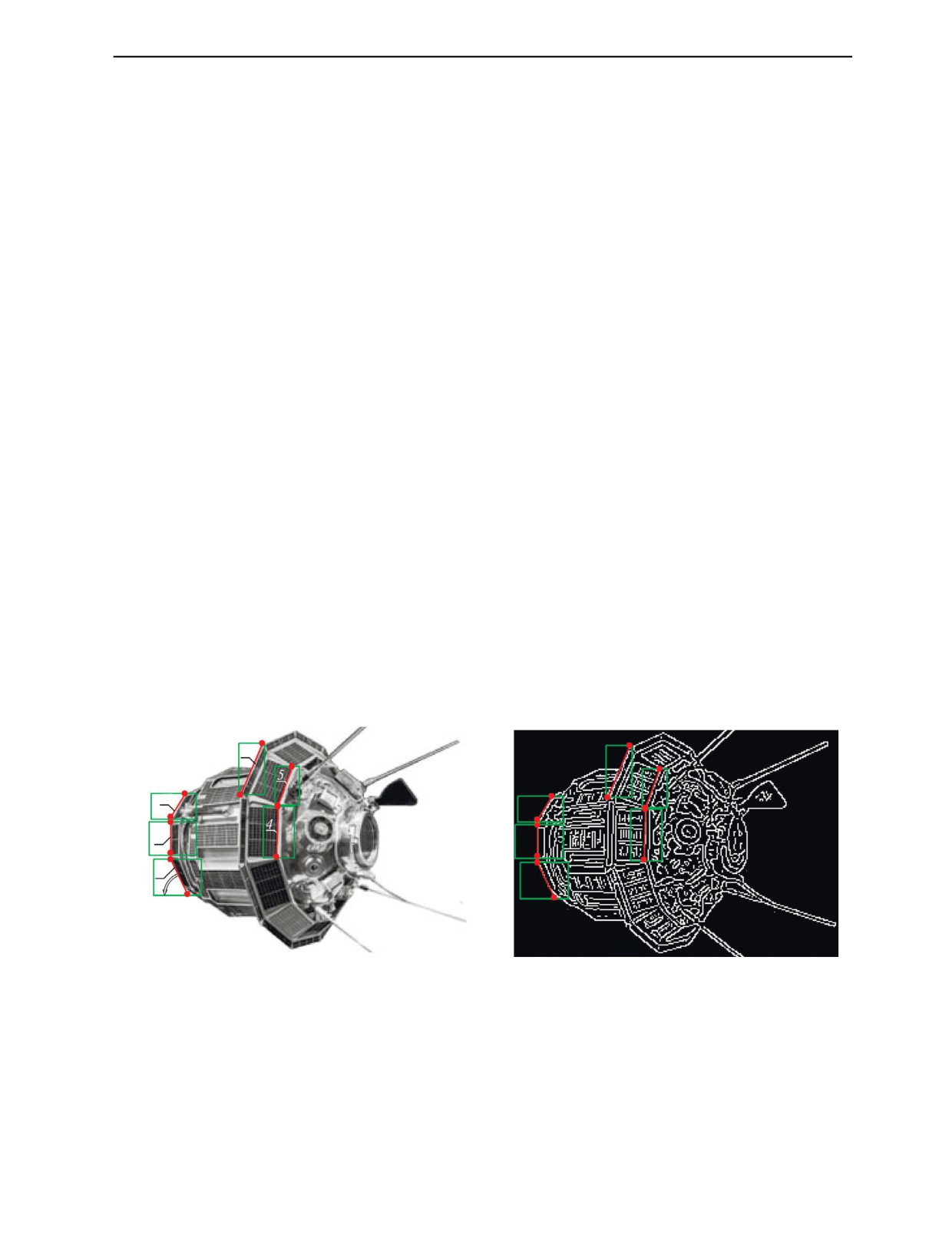
сельной структуры вдоль границ в изображении [35]. Результаты нахождения прямых линий в гра-
ницах контура для изображения спутника алгоритмом «Find Straight Edge» представлены на рис. 2
и в табл. 1.
а
б
6
Y3
3
2
1
X1
Угол
наклона
Рис. 2. Нахождение линий границ фрагментов контура в изображении спутника: изображение спутника 1000×700 пикс (а),
фрактальность изображения (Фильтр Канни) (б).
При этом оценка качества изображения оценивалась по параметрам его фрактальности — раз-
дельными линиями градиента контраста (Фильтр Канни) в изображении (рис. 2б). Выбор метода
обработка изображения для последующих измерений должна обеспечивать максимальную фрак-
тальность (детализацию).
Для дальнейшего исследования влияния качества изображения на измерительную точность
использовались алгоритмы представленные в программе «Astra Image PLUS», которые реали-
Дефектоскопия
№ 7
2020
34
В.Е. Махов, С.Е. Шалдаев, А.И. Потапов, Я.Г. Смородинский
Таблица
1
Нахождения прямых линий в контурах границ объекта
Прямолинейность,
№
X1, пикс
Y1, пикс
X2, пикс
Y2, пикс
Угол наклона, град
Средний SNR, дБ
пикс
1
27,44
153,00
40,03
180,00
25,00
0,49
70,13
2
27,42
124,00
27,03
148,00
-0,94
0,74
133,21
3
38,62
102,00
27,69
120,00
-31,26
0,30
196,29
4
110,36
112,00
109,09
151,00
-1,86
0,02
12,92
5
121,24
81,00
110,47
111,00
-19,74
0,04
69,00
6
98,89
63,00
81,87
103,00
-23,04
0,96
162,28
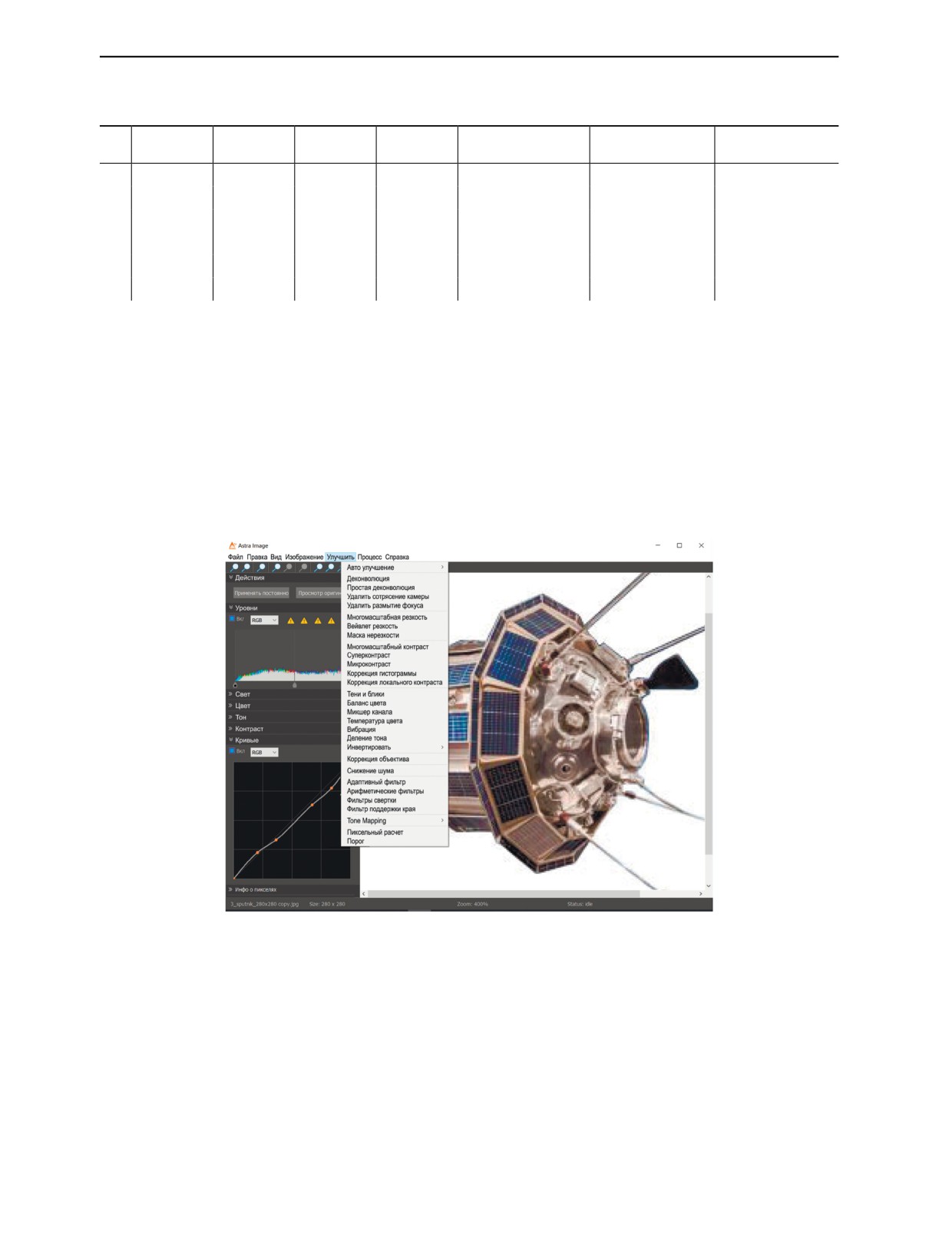
зуют основные методы повышения качества на базе известных методов: деконволюции, вейв-
лет-преобразования, кратно масштабного анализа [36] (рис. 3). Каждый представленный здесь
алгоритм изменения качества изображения имеет свои индивидуальные настройки, которые обе-
спечивают получение требуемых результатов. Применение указанных алгоритмов может повы-
сить не только видимое качество изображения, но и его фрактальность. Однако эти методы не
позволяет принципиально повысить детализацию (информативность) в изображении. Это указы-
вает на то, что в однопунктных ОЭС принципиально невозможно достичь более высокого каче-
ства одиночного изображения по сравнению с некоторым пороговым значением, обусловленным
параметрами сенсора.
Рис. 3. Алгоритмы изменения качества изображений в программе Astra Image PLUS.
Поэтому для радикального повышения качества исходного изображения необходимо исполь-
зовать дополнительную информационную составляющую, полученную из других зарегистриро-
ванных изображений данной или другой ОЭС. С целью исследования влияния от совмещения се-
рии изображений на точность измерений использовались методы соответствующих точек и ло-
кального анализа Фурье. Такие алгоритмы реализованы в ряде программ, таких как «RegiStax»,
«AutoStakkert», «PIPP», «PhotoAcute Studio», которые позволяют повысить разрешение и детали-
зацию изображения, устранить влияние шума и случайных артефактов, например временной меха-
нической нестабильности ОЭС, влияние градиента показателя преломления среды в тракте форми-
рования изображения ОЭС. При этом качество результирующего изображения нужно оценивать по
Дефектоскопия
№ 7
2020
Влияние качества изображений в оптико-электронных системах на точность определения...
35
его фрактальности и энтропии с одной стороны, с другой — с измерительной точностью алгорит-
мов определения геометрических и координатных параметров исследуемых объектов. Необходимо
иметь в виду, что в ряде случаев при обработке единичного изображения измерительная точность
некоторых параметров объекта или его фрагментов может повыситься лишь за счет повышения
локального контраста [12]. Однако после этого может снижаться эффект дальнейшего повышения
качества получаемого в серии изображений.
Определение геометрических форм объектов предполагает знание функции кривых их границ.
Точность получение дискретной функции линий границ в изображении определяется пиксельной
структурой области градиента контраста изображения, которые зависят от формата файла, угла на-
клона линии границ по отношению к системе координат матрицы фотодиодов регистратора [35].
Характер пиксельной структуры в областях границ изображения определяется топологией сенсора
регистратора и его схемными решениями, свойствами ОС (аберрациями, фокусировкой) [37]. Один
из способов повышения точности в определении координат точек границ является учет распреде-
ления пикселей в окрестности границ, например путем сканирования линии профиля изображения
по углу ее наклона с последующим использованием высокоточных методов определения коорди-
нат в слабо локализованных кривых яркости линий профиля [38].
Практическим аспектом применения ОЭС является получение некоторых комплексных инфор-
мационных параметров объектов (размера, параметров формы, координат) или распознавание объ-
ектов в некотором классе [39]. Ввиду влияния многих параметров качества и пиксельной структу-
ры изображения на алгоритмы получения таких параметров, точность и достоверность результатов
контроля фактически будет не прогнозируема. Особенно это относится к объектам сложной формы
и внутренней элементной структуры.
Рассмотрим пример определения характерного размера регистрируемого ОЭС ракурса спут-
ника R как объекта сложной геометрического формы и его координатного положения (X, Y) в изо-
бражении (ImN×M) заданного качества KI. Изменение качества изображения достигалось искус-
ственным снижением разрешения исходного изображения (Im(K×N)×(K×M), K<1) или повышением его
разрешения (NIR×MIR= K·N×K·M, K > 1), полученного алгоритмом синтеза изображения из серии
изображений
ℵ
{Im}
с существенно варьируемыми параметрами пиксельной структуры (ImiN×M ≠
≠ ImjN×M):
Q
i
Im
=ℵ
Im
(10)
N
IR
×M
IR
{
N×M
}
i=1
Степень варьирования пиксельной структуры в каждом фрагменте изображения можно оце-
нивать по пиксельной разности приведенных друг к другу изображений ImiNxM - ImjNxM. Значимой
основой варьирования пикселей в изображении является изменением условий регистрации (сме-
щение объекта или ОЭС, изменение ракурса), обеспечивающих бесшовность виртуальной расши-
ренной матрицы фотодиодов (NIR×MIR) или их дробное перекрытие.
В регистраторах СП физический размер матрицы фотодиодов (n×m) превышает размер фор-
мируемых на выходе плоских изображений ImN×M. Избыточность фотодиодов сенсора обеспечи-
вает возможность получения в одной экспозиции набора плоских слоев изображений [32] или их
смещение. Физически варьирование пикселей в точках изображений обеспечивается выбором на-
правлений хода лучей их формирующих. При этом максимальное количество значимых вариаций
пикселей в каждой точке изображений определяется количеством фотодиодов под микролинзами.
В работе проведено исследование изображений, полученных с регистратора СП с массивом
микролинз (Lytro ILLUM) [2, 24]. Известно, что регистратор СП можно рассматривать как плоский
массив ЦК малого разрешения. Глубина резкости отображаемого регистратором объема простран-
ства и угол визирования регистратора в процессе получения плоского изображения обеспечивается
выбором алгоритма суммирования сигналов с фотодиодов под микролинзами [24]. Эти алгоритмы
обеспечивают такие параметры регистратора как виртуальную апертуру регистратора (DV), рас-
стояние фокусировки и угол его визирования. Параметры преобразования объемных характери-
стик регистрируемого пространства из файла СП в яркостную структуру плоского изображения
задается в приложении Lytro Desktop [25]. При этом как всегда необходимо учитывать особенности
размерной пространственной калибровки регистратора СП [34].
С другой стороны, также известно, что формирование выходного плоского изображения в ре-
гистраторах СП описывается алгоритмом на базе четырех мерного преобразования Фурье лучей,
представленными их координатами и направлениями их распространения Ḟ4 {Li(x, y, θ, φ)} [33].
Можно отметить, что аналогичный принцип обработки может быть использован в серии изобра-
жений малоразмерных объектов низкого разрешения Ḟ4{ImK(R3 - t)}. Такие изображения могут
Дефектоскопия
№ 7
2020
36
В.Е. Махов, С.Е. Шалдаев, А.И. Потапов, Я.Г. Смородинский
быть получены в достаточном количестве от одной ОЭС в различные моменты времени или ска-
нированием изображения по сенсору ОЭС. Эффект алгоритма преобразования таких изображе-
ний может обеспечить повышение разрешения малоразмерных объектов (до 100 пикс) более чем
в 5 раз. Использование системы формирование множества изображений на одном сенсоре эквива-
лентно принципу ЦК СП с массивом микролинз. Однако обработка временной последовательности
изображений требует решения проблемы их координатного сопоставления по соответствующим
точкам, дающим вариации значений пикселей в структуре изображений.
Если изображение объекта занимает малую площадь сенсора, то используется малая часть его
информационной емкости. Если средствами ОЭС на поверхности одного сенсора формировать
целый ряд точно смещенных изображений [40], то это может также являться основой для их со-
вместной обработки. При этом не требует поиск соответствующих точек для совмещения изобра-
жений, расширяется динамический диапазон, устраняет шовность пиксельной структуры матрицы
фотодиодов. Один из способов реализации такого решения является построение много лучевой
ОЭС [41].
Таким образом, для повышения информативности изображения в системах регистрации ОЭС
необходимо иметь или создавать условия пиксельной вариации соответствующих точек, напри-
мер сдвиг изображений в дробно пиксельном диапазоне, изменения время накопления освещен-
ности (например, при наличии яркостного блеска). Эффект вариации часто достигается в условиях
естественной или заданной механической нестабильности объекта контроля или самой ОЭС [42].
Контроль механической стабильности системы, расфокусировку ОЭС можно реализовать путем
анализа характера размытия границ (градиента яркости) в изображении высокоточными методами
вейвлет анализа [43]. В размытом (несфокусированном) изображении информация перераспреде-
ляется по некоторому закону и может быть восстановлена [36, 37]. Исключение составляет лишь
края изображения шириной в радиус размытия — там полноценное восстановление в одном кадре
в принципе невозможно.
Наибольшим влияниям ухудшения качества формируемого изображения подвержены ОЭС,
регистрирующие удаленные объекты. Для исследования качества получаемых изображений уда-
ленных объектов и результатов алгоритмов его повышения использовалась два варианта экспе-
риментальных установок регистрации, представленных на рис. 4. Оптическая система (рис. 4а)
построена на базе телескопа 1 Celestron NexStar 4 SE (D = 102 мм, f ʹ=1325 мм). В качестве при-
емника изображения в первом канале использовалась цифровая окулярная насадка с адаптером 2
(Levenhuk T300 PLUS), во втором канале использован регистратор СП (Lytro ILLUM) с окуляром
(25 мм) 3. Оптическая система второй экспериментальной установки (рис. 4б) построена на базе
зрительной трубы 4 Celestron C70 Mini Mak (D = 70 мм, f' = 750 мм). Здесь был использован реги-
стратор СП 5 (Lytro Light Field Camera). Расстояние до объекта определялось лазерной рулеткой 6.
Таким образом, определялось расстояние до объекта — s. Для получения данных о механической
а
б
3
2
1
5
4
7
6
6
Рис. 4. Экспериментальные установки ОЭС:
1 — телескоп Celestron NexStar 4, 2 — ЦК Levenhuk T300 PLUS, 3 — ЦК Lytro ILLUM (версия B5-0036), 4 — зрительная труба Celestron
C70 Mini Mak, 5 — ЦК Lytro, 6 — лазерный дальномер (Bosch GLM 100), 7 — доплеровский радиолокатор (13 мм).
Дефектоскопия
№ 7
2020
Влияние качества изображений в оптико-электронных системах на точность определения...
37
нестабильности телескопа 1 использовался доплеровский локатор 7 (13 мм) с программным обе-
спечением анализа механической нестабильности, что позволяло при известных параметрах опти-
ческой схемы определить радиус размытия точек изображения.
Изображения, полученные с ЦК 2 и регистратора СП 3 (рис. 4а), имели примерно оди-
наковое разрешение (2048×1536, 2450×1634), что давало возможность проводить сравнение
получаемых изображений. Линейное увеличение ОС телескопа (V) в режиме регистрации изо-
бражений фотоприемником телескопа (астрограф) определяется как V = fʹ/(s-fʹ). Глубина резко
отображаемого пространства определяется параметрами ОС и приемникa изображения, рас-
стоянием до объекта [25]. Для рассмотренных конфигураций ОЭС имеем: V1 = 0,28, V2 = 0,14.
Это соответствует дискретности отображаемой ОС предметной плоскости объекта Δa = aʹ/V
(aʹ — шаг матрицы фотодиодов).
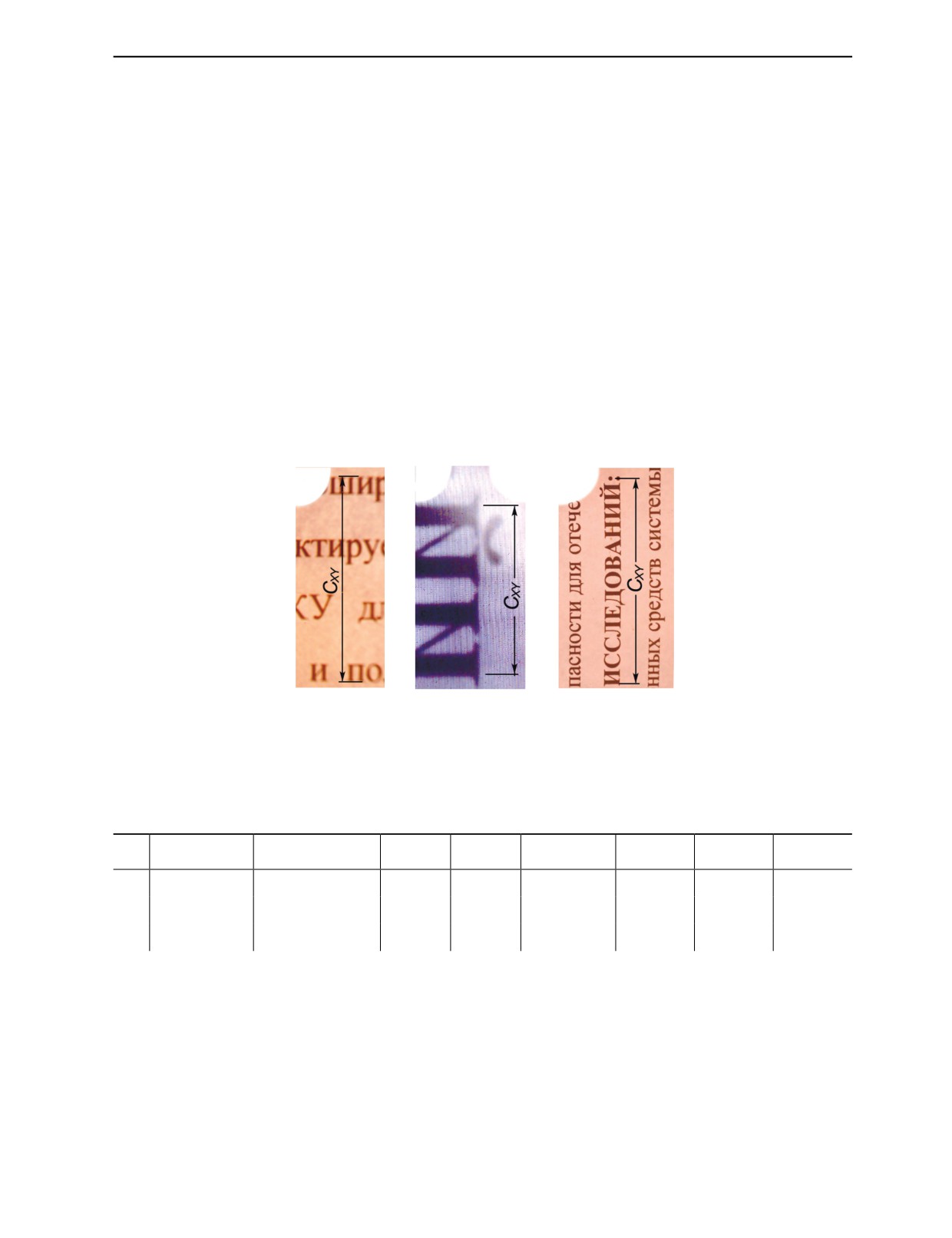
Сравнение изображений, полученных ОС телескопа при помощи окулярной цифровой насадки,
регистратором СП и цифровой камерой высокого разрешения (цифровой смарт-камеры для объ-
екта в виде бумажной мишени с текстовой надписью), показано на рис. 5. Характеристики ОЭС и
изображений представлены в табл. 2. Линейный размер фрагмента мишени CXY отображается ОС
в размер CʹXY плоскости МФП. Максимальное качество и детализация в изображении, как и сле-
довало, предположить получается с ЦК высокого разрешения. Однако регистратор СП отображал
микрорельеф поверхности самой мишени (рис. 5б). Таким образом, появляется информационная
составляющая яркостной структуры изображения вдоль оси визирования регистратора СП, что по-
зволяет повысить качество и информативность плоского изображения.
а
б
в
Рис. 5. Изображения с различных датчиков изображений:
а — с цифровой окулярной насадки Levenhuk T300 PLUS (100 %); б — с регистратора СП — Lytro ILLUM (33 %); в — с цифровой
камерой — EOS 6D (33 %).
Таблица
2
Параметры изображений ОЭС с разными регистраторами
№
Поле зрения, мм
Размер ФП a×b, мкм
Vрасч
Vэкс
Размер CXY, мм
C'XY, пикс
C'XY, мм
Δa, мм
а
6,4×4,8
3,2×3,2
-
0,103
32,0
527
3,29
0,03
б
5,57×4,17
1,27×1,27
-
0,41
8,0
1294
3,25
в
36×24
6,58×6,58
0,25
0,21
48,0
1502
9,88
0,03
Экспериментальные исследования показали что измерения, проведенные в изображениях,
полученные из серии изображений с однопунктных ОЭС с различными фотоприемниками, обе-
спечивают повышение измерительной точности в двух изображениях на треть и более чем в два
раза в многопозиционных ОЭС. Это связано с тем, что для многопозиционных ОЭС повышение
точности связано с гарантированным пиксельным смешением каждого изображения, увеличени-
ем числа фотодиодов, регистрирующих яркостную структуру объектов. Максимальный удель-
ный эффект достигается в двух изображениях, после этого сильное влияние оказывают ошибки
преобразований и совмещения изображений. Дальнейшее увеличение разрешения и измеритель-
Дефектоскопия
№ 7
2020
38
В.Е. Махов, С.Е. Шалдаев, А.И. Потапов, Я.Г. Смородинский
а
б
в
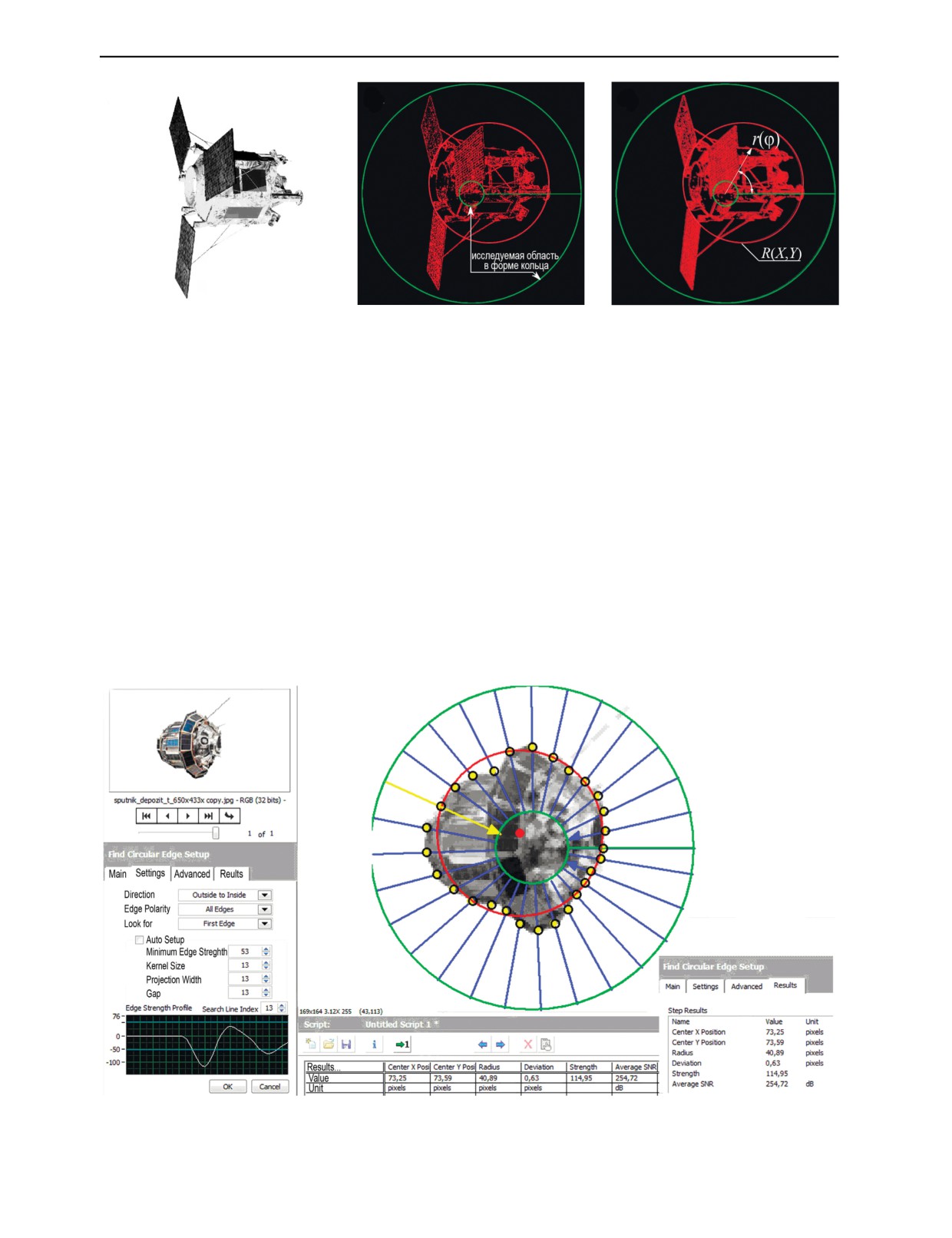
Рис. 6. Определение качества исходного изображения (а) через его фрактальность (б, в), определение эквивалентного
радиуса R ракурса объекта и его координат X, Y (в).
ной точности в серии изображений происходит только при наличии значительного шума и ряда
случайных неконтролируемых факторов.
Как было указано ранее, детализация изображения определяется его фрактальностью, которая
определяется количеством (протяженностью) и распределением кривых градиента яркости в де-
талях изображения. Повышение разрешения и качества изображения дает возможность разрешать
и анализировать близко расположенные линии градиента яркости (рис. 6), определять параметры
более мелких элементов или дефектов в деталях изображении.
На практике важным вопросом контроля является получение некоторой информации по объ-
екту — координатных и размерных характеристик объекта, отличительных параметров формы.
Существует множество алгоритмов выделения таких информационных параметров объекта по
их изображению [15, 44]. Так, например, функция поиска границ по радиальным линиям по-
иска градиента контраста освещенности (Find Circular Edge), имеющая параметры настройки
алгоритма, определяет координаты границ контура r(φ), найденные в полярной системы коорди-
нат, статистическую вариацию радиуса и центр эквивалентной окружности R(X,Y) (рис. 6в, рис.
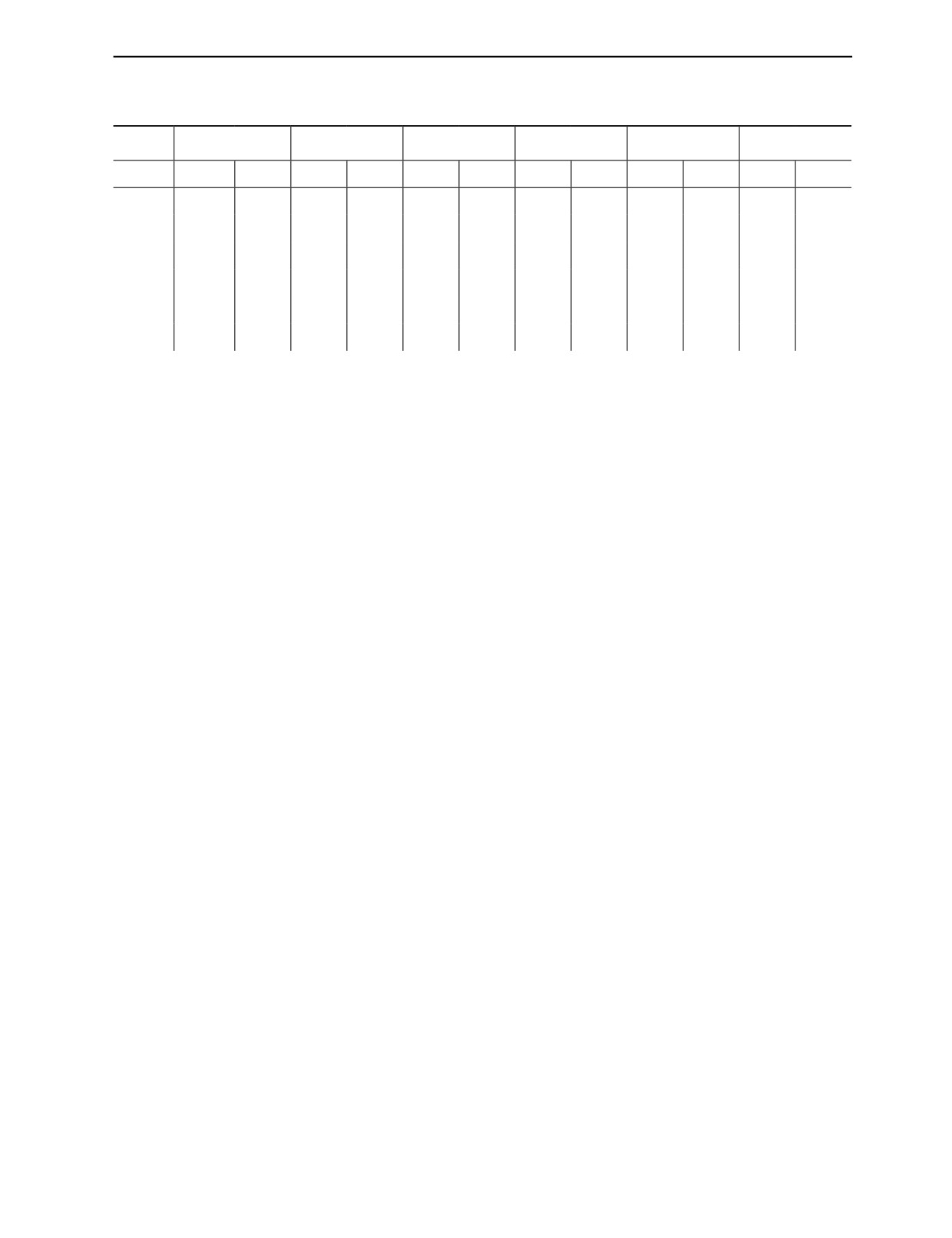
7в). Варьирование параметров алгоритма (рис. 7б) позволяет добиться формирование устойчи-
а
в
б
д
г
Рис. 7. Алгоритм определение эквивалентного размера и координат спутника алгоритмом поиска точек границ:
а — просмотр изображения; б — параметры настройки алгоритма; в — процесс работы алгоритма; г — результат работы алгоритма;
д — полученные результаты.
Дефектоскопия
№ 7
2020
Влияние качества изображений в оптико-электронных системах на точность определения...
39
Таблица
3
Зависимость геометрических измерений от качества изображения
Размер
Центр X, пикс
Центр Y, пикс
Радиус, пикс
Отклонение, пикс
S [45]
Ср. SNR, дБ
изобр.
Gap 10
Gap 5
Gap 10
Gap 5
Gap 10
Gap 5
Gap 10
Gap 5
Gap 10
Gap 5
Gap 10
Gap 5
100%
102,,66
108,93
133,85
135,09
88,69
81,65
2,56
1,72
138,99
130,75
220,06
165,66
90%
117,05
113,01
144,52
146,21
70,16
75,68
2,63
1,76
150,15
142,04
196,36
214,17
80%
109,95
112,53
133,62
132,30
71,37
68,86
1,96
1,27
140,65
129,97
225,44
217,64
70%
114,22
113,88
133,96
140,78
61,79
61,88
1,50
1,18
133,67
135,93
236,48
218,47
60%
117,71
117,76
133,30
140,64
52,86
52,26
1,33
0,97
128,55
130,68
198,73
209,79
50%
121,55
121,41
136,80
139,68
43,30
43,70
0,95
0,68
122,21
123,54
173,12
167,61
вых результатов определения формы объекта по его координатам и оценить достоверность по-
лученных результатов. Количество установленных радиальных линий поиска границы объекта
(«Gap») определяет параметры детализации анализируемого контура объекта или устранение
незначимых деталей формы границ. В результате получаем координаты местоположения (X, Y) и
характерный размер спутника R. Степень отклонения формы от окружности определяет индиви-
дуальные характерные объекта (облик). Нетрудно видеть, что изображения различного качества
различным образом меняют все измеряемые параметры. Результаты исследования точности и
достоверности измеряемых параметров от разрешения исходного изображения представлены в
табл. 3. Подробное описание настроек алгоритма полученных результатов (рис. 7д) приведено в
описании функции «Detect Circular Edges» [45].
Механическая нестабильность ОЭС или объекта контроля [42] снижает качество изображения
в алгоритмах его оценки, так как приводит к размытию границ контраста в изображении. Расфоку-
сировка ОЭС [43], смещение объекта контроля во время экспозиции также вносят деструктивный
характер во все показатели качества изображения, в то же время они могут содержать полезную
информацию о координатных динамических характеристиках самого объекта контроля. Такие ис-
кажения изображения может быть проанализировано или в ряде случаев исходное изображение
может быть восстановлено. Однако при этом всегда требуется установить характер дестабилизиру-
ющих факторов. В ряде случаев представляет интерес определить величину перемещения объекта
за время экспозиции или амплитуду его колебания. На практике зона размытия границ в изображе-
нии мала, поэтому метод непосредственного определения перемещения изображения на матрице
фотодиодов имеет низкую чувствительность и узкий диапазон измерения. Поэтому для расшире-
ния диапазона измерений параметров механических нестабильности [43], повышения точности
их измерения в других неблагоприятных условиях, в частности, в отсутствие возможности точной
фокусировки ОЭС, следует использовать оптическую схему регистрации на базе одного [25] или
нескольких регистраторов [46].
Ввиду больших возможностей многопунктных систем следует обратить внимание на регистра-
торы СП (как массив ЦК). Алгоритмы обработки файла СП формируют изображение (2D) с задан-
ной плоскостью фокусировки, глубиной резко отображаемого пространства и углом визирования
камеры. Изменение распределения освещенности в каждой линии профиля 2D-изображения выде-
ляет зону градиента яркости в зоне границы в изображении объекта. При наличии колебаний кон-
тролируемого объекта происходит размытие зоны границы изображения ∆xT за время экспозиции
кадра изображения T (рис. 8).
На гистограммах распределения освещенности I(x, z) в выбранных линиях профиля изображе-
ния объекта L(z) наблюдаются характерные перегибы функции освещенности I(x) в зоне размытия
границ резкости, вызванные возвратно-поступательной механической перемещениями ОЭС или
объекта за время формирования кадра изображения. При малых перемещениях — зона размытия
∆x будет сопоставима с размером пикселя и не способна обеспечить достаточную чувствитель-
ность и точность определения амплитуды колебаний. При использовании регистратора СП предо-
ставляется новая возможность алгоритмически изменять угол визирования, то есть получать из
3D
2D
K
файла светового поля серию изображений со смещенным полем зрения
Im
→{Im
(x
+∆x
, z)}
i
i
=1
и вариацией пиксельной структуры.
Дефектоскопия
№ 7
2020
40
В.Е. Махов, С.Е. Шалдаев, А.И. Потапов, Я.Г. Смородинский
а
б
Линия профиля
Линия профиля
X,
X,
пикс
пикс
z2
z1
z2
z1
Z,
Z,
пикс
пикс
Рис. 8. Распределение освещенности в линии профиля изображения:
а — статическое состояние объекта; б — колебательная механическая нестабильность объекта.
Суммарное изображение смещенных изображений по полю зрения в одном кадре одной экспо-
зиции расширяет зону размытия узкой зоной границы, вызванное механической нестабильностью,
увеличивает размер значимой выборки исследуемой функции градиента яркости:
K
2D
1
Im
(x,z)
=
Im(x+i⋅∆x
, z).
(10)
sum
∑
i
K
i
=1
Далее, для точности определения параметров границ и величины механической нестабиль-
ности по изображению, полученному методом суммирования сканированных по углу визиро-
вания изображений, проведены простые вычислительные эксперименты. Проведено сравнение
каждого изображения и изображения, полученного в серии сдвинутых алгоритмом визирования
изображений (рис. 9). Видно, что зона функции распределение освещенности I(x) в зоне раз-
мытия уширяется (рис. 9б), а ее первая производная I(x)/dx становится более гладкой и инфор-
мативной. Увеличение зоны размытия колебаний может быть достигнуто на число пикселей под
микролинзами регистратора СП в каждом линейном измерении или корню квадратному из числа
регистрируемых слоев в файле СП (указывается производителем), что соответствует примерно
на 10 выборкам.
а
б
в
г
Рис. 9. Распределение освещенности и первая производная в линиях профиля изображения с изменением угла визирова-
ния (а); суммарная функция освещенности, первая и вторая производные (б); НВП освещенности в линии профиля (в);
кривые коэффициентов НВП функции отдельной и суммарной линии профиля (г).
Дефектоскопия
№ 7
2020
Влияние качества изображений в оптико-электронных системах на точность определения...
41
Параметры колебаний определяются анализом кривых коэффициентов g(x) непрерывного вейв-
лет-преобразования (НВП—CWT) суммарной освещенности (Imsum(x, z)) в линиях профиля по за-
данной длине объекта z⊂ (z1, z2) (рис. 9в):
z2
2D
g x)
CWT(
Im
(x,z).
sum
=∑
∑
m
z=z1
Совершенно очевидно, что, конфигурируя оптическую систему (линейное увеличение и рас-
стояние до зоны контроля), можно повысить точность определения параметров колебаний для за-
данного диапазона их амплитуд.
Изменение угла визирования также меняет суммарную фрактальность, что можно трактовать
как повышение качества изображения. Измерения, выполненные в каждом изображении, можно
статистически обработать, но такой же результат получается при измерениях, правильно выпол-
ненных с применением НВП к суммарно размытому изображению.
ВЫВОДЫ
Проведенные модельные и экспериментальные исследования показали, что измерения в по-
лученных изображениях при условиях максимального повышения его качества дают повышение
измерительной точности более чем в 5 раз при снижении порога обнаружения мелких дефектов.
Исследований измерительных алгоритмов на изображениях различного качества дают сделать
вывод, что повышение разрешения путем обработки кадрового изображения в большинстве слу-
чаев позволяет повысить точность измерения в 2—5 раз. Для малоразмерных объектов с большим
уровнем шумов точность измерения можно повысить более чем в два раза. Для изображений, по-
лученных цифровыми камерами светового поля в одной экспозиции, повышение точности изме-
рительных алгоритмов обеспечивается физическим размером сенсора, снижением влияния шумов
фотодиодов сенсора и фактором взаимного их влияния. Обработка слоев изображений снижает
уровень шумов, вызванных высоким уровнем яркости. Повышение качества много кадровой об-
работки имеет эффект при изменении угла визирования камеры. Многопозиционные системы обе-
спечивают больше возможности получения изображений более высокого качества, однако требуют
знания точных параметров конфигурации ОЭС.
Предварительный анализ качества получаемого ОЭС изображения позволяет прогнозировать
точность и достоверность измерения контролируемых параметров, проводить оценку техническо-
го состояния сложных геометрических объектов, таких как отечественные космические аппараты
при воздействии космического мусора.
Результаты исследований были представлены на IV Открытой выставке научно-технического
творчества (НТТА) ВКА им. А. Ф. Можайского в 2016 году (II место), а также на Международном
военно-техническом форуме «Армия 2018» (грамота).
Работа выполнена в рамках государственного задания МИНОБРНАУКИ России (тема
«Диагностика», № АААА-А18-118020690196-3).
СПИСОК ЛИТЕРАТУРЫ
1. Грузман И.С., Киричук В.С. и др. Цифровая обработка изображений в информационных системах
/ Учеб. пособие. Новосибирск: Изд-во НГТУ, 2000. 168 с.
2. Kučera Jan. Computational photography of light-field camera and application to panoramic photography.
Department of Software and Computer Science Education Supervisor of the master thesis / Ing. Filip Šroubek,
Ph.D. Study programme: Computer Science, Software Systems Specialization: Computer Graphics. Prague
2014. 98 p.
3. Makhov V.E., Sytko I.I. Shape and Relief Evaluation Using the Light Field Camera / В сборнике: IOP
Conf. Series: Earth and Environmental Science. 2018. V. 194. С. 022020.
4. Shannon C. E. A mathematical theory of communication // The Bell System Technical Journal. 1948.
V. 27. Is. 3. July. P. 379—423.
5. Ермолова Е.В., Зверев В.А. Филатов А.А. Адаптивная оптика. СПб.: НИУ ИТМО, 2012. 297 с.
6. Чочиа П. А., Милюкова О. П. Сравнение двумерных вариаций в контексте оценки сложности дис-
кретных изображений // Информационные процессы. 2015. Т. 15. № 2. С. 169—182.
7. Кронрод А. С. О функциях двух переменных // УМН. 1950. 5:1 (35). С. 24—134.
8. Feder J. Fractals. Springer Science + Business Media, LLC, 1988. 305 p.
9. Frucci Maria, Sanniti di Baja Gabriella. From Segmentation to Binarization of Gray-level Images
// Journal of Pattern Recognition Research. 2008. V. 3 (1). P. 1—13.
10. Чуи Ч.К. Введение в вейвлеты. М.: Мир, 2001. 412 с.
Дефектоскопия
№ 7
2020
42
В.Е. Махов, С.Е. Шалдаев, А.И. Потапов, Я.Г. Смородинский
11. Гонсалес Р., Вудс Р. Цифровая обработка изображений. М.: Техносфера, 2006. 1072 с.
12. Журавель И.М. Краткий курс теории обработки изображений. [Электронный ресурс] Режим до-
13. Maksarov V.V., Makhov V.E. Studying parameters and quality of thread by optical light field recorder /
IOP Conf. Series: Earth and Environmental Science. 2018. V.194. 062017. P. 1—6.
14. Махов В.Е., Потапов А.И. Использование алгоритмов вейвлет-анализа для построения оптиче-
ских измерительных систем // Контроль. Диагностика. 2013. № 1. С. 12
—21.
15. Махов В.Е., Палаев А.Г., Потапов А.И. Автоматизация контроля качества сварных швов с ис-
пользованием ультразвуковых технологий // Известия высших учебных заведений. Приборостроение.
2009. Т. 52. № 5. С. 75-81.
16. Махов В., Лиференко В., Борисов Е. Общий подход к оцифровке графических зависимостей в
изображении в среде LABView // Компоненты и технологии. 2016. № 9 (182). С. 141—146.
17. Компьютерная обработка изображений. Конспект лекций. [Электронный ресурс]. Режим досту-
18. Василенко Г. И., Тараторин А. М. Восстановление изображений. М.: Радио и связь, 1986. 304 с.
19. Панфилова К.В. Компенсация линейного смаза цифровых изображений с помощью метода Лю-
си-Ричардсона / Юбилейная 25-а Международная конференция (GraphiCon 2015), Россия, Протвино
(Парк Дракино), 22—25 сентября 2015 г. С. 163—167.
20. Красильников Н.Н. Цифровая обработка 2D- и 3D-изображений / Учебное пособие. СПб.: БХВ-
Петербург, 2011. 608 с.
21. Шахтарин Б.И. Фильтры Винера и Калмана: Учебное пособие для вузов. 2-е издание, исправ-
ленное. 2014. 396 с.
22. Potapov A.I., Makhov V.E. et al. Smart-Camera — Based Linear Sizing // Russian Journal of Nondestruc-
tive Testing. 2019. V. 55. No. 7. P. 524—532. [Потапов А.И., Махов В.Е., Смородинский Я.Г., Маневич Е.Я.
Контроль линейных размеров на база смарт-камеры // Дефектоскопия. 2019. № 7. С. 37—45. ]
23. Махов В.Е., Репин О.С. Исследование возможностей систем видеоконтроля на базе решений
фирмы National Instruments на станках рулонной печати / Материалы 2-й Межд. научно-практ. конфе-
ренции: Современное Машиностроение / Под ред. М.М. Радкевича и А.Н. Евграфова. СПб.: Изд-во
Политехн. ун-та, 2012. С. 500—510.
24. Махов В., Потапов А., Закутаев А. Принципы работы цифровых камер светового поля с масси-
вом микролинз // Компоненты и технологии. 2018. № 1 (198). С. 14—20.
25. Махов В.Е., Потапов А.И., Шалдаев С.Е. Контроль геометрических параметров изделий мето-
дом светового поля // Контроль. Диагностика. 2017. № 7. С. 12
—24.
26. Тревис Дж., Кринг Дж. LabVIEW для всех. М.: ДМК Пресс, 2008. 880 с.
27. Махов В., Лиференко В., Закутаев А. Методы частотно-временного анализа сигналов и их ком-
пьютерная реализация в LabVIEW // Компоненты и технологии. 2016. № 7 (180). С. 137
—142.
28. Лиференко В., Закутаев А., Махов В. Компьютерная реализация методов вейвлет-анализа в
среде разработки виртуальных приборов NI LabVIEW // Компоненты и технологии. 2015. № 9 (170).
С. 132—139.
29. Визильтер Ю. В., Желтов С. Ю., Князь В. А., Ходарев А. Н., Моржин А. В. Обработка и анализ
цифровых изображений с примерами на LabVIEW IMAQ Vision. М.: ДМК Пресс, 2007. 464 с.
30. Mobberley Martin. Lunar and Planetary Webcam User’s Guide. Springer. 2006. 89 p.
31. Шавкутенко Е. Н., Мильдер О. Б. Что такое «Мегалуч»? / Передача, обработка, восприятие
текстовой и графической информации: материалы международной научно-практической конференции
(Екатеринбург, 19—20 марта 2015 г.). Екатеринбург: УрФУ, 2015. С. 47—57.
32. 3D Light Field Camera Technology / Copyright © 2013 by Raytrix GmbH, Germany. [Электронный
Яз. англ.
33. Ng R. Digital light field photography // A dissertation submitted to the department of computer science
and the committee on graduate studies of Stanford university in partial fulfillment of the requirements for the
degree of doctor of philosophy. @ Copyright by Ren Ng 2006. 187 p.
34. Bok Y., Jeon H.-G., Kweon I. S. Geometric Calibration of Micro-Lens-Based Light-Field Cameras
using Line Features // IEEE Transactions on Pattern Analysis and Machine Intelligence. 2017. V. 39. Iss. 2.
P. 17—61.
35. Махов В.Е., Потапов А.И., Шалдаев С.Е. Исследование границ изображения методом выделения
контраста с использованием оптико-электронной системы. Часть 1. Научно-методические принципы
контроля границ изображения методом выделения контраста // Контроль. Диагностика. 2017. № 10.
С. 44—51.
html (доступ свободный). Загл. с экрана. Яз. англ.
37. Беззубик В.В., Белашенковa Н.Р., Вдовинa Г.В., Кармановский Н.С., Соловьев О.А. Метод повы-
шения резкости цифровых изображений // Научно-технический вестник информационных технологий,
механики и оптики. 2014. № 6 (94). С. 82—90.
Дефектоскопия
№ 7
2020
Влияние качества изображений в оптико-электронных системах на точность определения...
43
38. Махов В.Е., Потапов А.И., Шалдаев С.Е. Исследование границ изображения методом выделе-
ния контраста с использованием оптико-электронной системы. Часть 2. Экспериментальные модельные
исследования границ изображения на основе вейвлет преобразования // Контроль. Диагностика. 2017.
№ 11. С. 4—11.
39. Фисенко В.Т., Фисенко Т.Ю. Компьютерная обработка и распознавание изображений / Учеб. по-
собие. СПб.: СПбГУ ИТМО, 2008. 192 с.
40. Махов В. Е. Цифровая реализация фазово- растрового метода координатного определения ме-
ток лазерного целеуказателя / Труды Двенадцатой Всероссийской научно- практической конференции
РАРАН: Актуальные проблемы защиты и безопасности, (1 - 3 апреля 2009 г.). Т. 3. СПб.: НПО Специ-
альных материалов, 2009. С. 289—294.
41. Makhov V.E., Potapov A.I. et al. Using Two-Beam Interferometry in Surface Deformation Monitoring
Systems // Russian Journal of Nondestructive Testing. 2019. V. 55. No. 8. P. 622—629. [Махов В.Е., Пота-
пов А.И., Смородинский Я.Г., Маневич Е.Я. Использование двух лучевой интерферометрии в системах
контроля деформации поверхностей // Дефектоскопия. № 8. 2019. С. 59-66.]
42. Махов В.Е., Потапов А.И. Исследование измерительной оптической системы в условиях меха-
нической нестабильности объекта контроля // Контроль. Диагностика. 2013. № 2. С. 12
—23.
43. Мерзляков М.А., Махов В.Е., Авсюкевич Д.А. Методика построения диагностики состояния опти-
ко-электронных систем // Вестник Российского нового университета. Серия: Сложные системы: моде-
ли, анализ и управление. 2018. № 3. С. 65
—73.
44. Махов В.Е., Борисов С.В., Широбоков В.В., Закутаев А.А. Макет для разработки программно-ал-
горитмического комплекса контроля объектов космического пространства // Вестник Российского ново-
го университета. Серия: Сложные системы: модели, анализ и управление. 2019. № 1. С. 75
—87.
45. Klinger T. Image processing with Labview and Imaq Vision (National Instruments Virtual Instrumentation
Series). Prentice Hall Professional, 2003. 319 p.
46. Maksarov V. V., Makhov V. E. Intelligent systems for monitoring and controlling chip formation
560:012028. July 2019.
47. Maksarov V.V., Makhov V.E. Materials Science and Engineering Intelligent systems for monitoring and
controlling chip formation when cutting difficult-to-machine materials / IOP Conference Series. 2019.
Дефектоскопия
№ 7
2020