Акустические методы
УДК 620.179.162
ПРИМЕНЕНИЕ НЕЭКВИДИСТАНТНОГО ПРЕОБРАЗОВАНИЯ ФУРЬЕ
ДЛЯ РЕШЕНИЯ ЗАДАЧ УЛЬТРАЗВУКОВОЙ ТОМОГРАФИИ
С ИСПОЛЬЗОВАНИЕМ АНТЕННЫХ РЕШЕТОК
© 2020 г. Д.О. Долматов1,*, Н.И. Ермошин1,**, Д.А. Конева1,***, Д.А. Седнев1,****
1Национальный исследовательский Томский политехнический университет,
Россия 634040 Томск, ул. Ленина, 30
E-mail: *dolmatovdo@tpu.ru;**nikvan@tpu.ru; ***d.a.koneva@gmail.com; ****sednev@tpu.ru
Поступила в редакцию 28.04.2020; после доработки 22.06.2020
Принята к публикации 23.06.2020
В ультразвуковой томографии с использованием технологии цифровой фокусировки антенной (ЦФА) задача повы-
шения производительности контроля неразрывно связана с задачей повышения скорости получения синтезированных
изображений. Данная задача может быть эффективно решена при одновременном использовании нескольких подходов,
направленных на повышение скорости получения результатов. В рамках этой работы рассматривается алгоритм неэкви-
дистантного быстрого преобразования Фурье (НБПФ). НБПФ может быть использован в существующих вычислитель-
но-эффективных алгоритмах пространственно-временной обработки с расчетами в частотной области и способен обе-
спечивать корректное восстановление синтезированных изображений при использовании разреженных и неэквиди-
стантных антенных решеток (АР). Полученные экспериментальные данные свидетельствуют о способности алгоритма
на основе НБПФ восстанавливать синтезированные изображения с высокой разрешающей способностью.
Ключевые слова: ультразвуковая томография, цифровая фокусировка антенной, антенные решетки, неэквидистантное
быстрое преобразование Фурье, алгоритмы пространственно-временной обработки с расчетами в частотной области.
DOI: 10.31857/S0130308220080011
ВВЕДЕНИЕ
Актуальным вопросом развития методов и аппаратуры ультразвукового неразрушающего кон-
троля является переход от решения задачи дефектоскопии к решению задачи дефектометрии. В
этой связи, большой интерес представляют системы промышленной ультразвуковой томографии,
обеспечивающие получение результатов контроля в форме изображений внутренней структуры
объектов, обладающие высокой разрешающей способностью. Одним из подходов, нашедшим
широкое применение в системах ультразвуковой томографии, является технология ЦФА. Она
предполагает использование АР в качестве ультразвукового преобразователя и получение изобра-
жений внутренней структуры объектов контроля за счет применения алгоритмов пространствен-
но-временной обработки, основанных на методе синтезированной апертуры [1, 2].
В контексте использования систем ультразвуковой томографии, задача повышения произво-
дительности ультразвукового контроля неразрывно связана с задачей увеличения скорости полу-
чения изображений без потери их качества. Все существующие решения данной задачи могут быть
разделены на два принципиальных подхода. Первый подход заключается в использовании в про-
странственно-временной обработке оптимизированного набора данных, обеспечивающего высо-
кое качество получаемых синтезированных изображений. Для решения задачи оптимизации набо-
ра ультразвуковых данных могут использоваться разреженные АР или неэквидистантые преобра-
зователи.
В случае, если в процессах зондирования объекта контроля и приеме отраженных эхосигналов
принимают участие не все элементы АР, то говорят о разреженных АР. Выбранная конфигурация
разреженной АР должна создавать в объекте контроля акустическое поле, способное обеспечивать
получение синтезированного изображения высокого качества. Простейшим подходом к определе-
нию конфигурации разреженной АР является перебор элементов [3]. Также для повышения скоро-
сти нахождения оптимальной конфигурации разреженной АР могут применяться стохастические
алгоритмы оптимизации, например алгоритм имитации отжига или генетический алгоритм [4, 5].
Кроме того, оптимизированный набор данных может быть получен за счет использования
неэквидистантных АР, в которых элементы расположены с непостоянным шагом. АР данного типа
способны обеспечить получение синтезированных изображений высокого качества при меньшем
по сравнению с эквидистантными преобразователями количеством элементов. В контексте исполь-
зования матричных АР было предложено использование спиральных преобразователей, а также
датчиков с расположением элементов, описываемых диском Пуассона [6—8].
4
Д.О. Долматов, Н.И. Ермошин, Д.А. Конева, Д.А. Седнев
Вторым подходом, направленным на повышение скорости получения синтезированных изо-
бражений, является разработка и использование вычислительно-эффективных алгоритмов про-
странственно-временной обработки. В этой связи большой интерес представляют алгоритмы с
расчетами в частотной области. Подобные алгоритмы способны обеспечить более высокую ско-
рость получения изображений по сравнению с широко применяемыми на сегодняшний день алго-
ритмами расчета во временной области [9, 10]. Алгоритмы пространственно-временной обработки
с расчетами в частотной области базируются на использовании алгоритма быстрого преобразова-
ния Фурье (БПФ), который подразумевает преобразование данных, заданных на равномерной
сетке. В свою очередь, использование разреженных и неэквидистантных АР предполагает реги-
страцию ультразвуковых данных с непостоянным шагом между элементами. Это, в результате,
приводит к тому, что пространственно-временной обработке подлежат данные, заданные на
неравномерной сетке. Таким образом, актуальным вопросом применения алгоритмов простран-
ственно-временной обработки с расчетами в частотной области является их адаптация для случая,
когда применяются разреженные или неэквидистантные АР.
В рамках данной работы для адаптации алгоритмов пространственно-временной обработки с
расчетами в частотной области ультразвуковых данных, заданных на неравномерной сетке, рассма-
тривается алгоритм НБПФ. Этот алгоритм способен обеспечить корректность пространственно-
временной обработки при сохранении высокой вычислительной эффективности, характерной для
стандартного БПФ [11]. Эффективность применения НБПФ изучается в рамках использования раз-
реженных АР, конфигурация которых определяется с использованием алгоритма имитации отжига.
МЕТОДИКА ПРОВЕДЕНИЯ ИССЛЕДОВАНИЯ
Алгоритм НБПФ. Задача получения фурье-образа F(k1, k2, k3) функции f(x, y, z), заданной на
нерегулярной сетке, является неэквидистантным преобразованием Фурье первого рода. Реализа-
ция алгоритма НБПФ, обеспечивающего высокую скорость получения результатов, рассмотрена в
[12]. Данный алгоритм включает в себя последовательное применение операции свертки с гаусси-
аном, применение алгоритма быстрого преобразования Фурье и реализацию обратной свертки.
Для реализации операции свертки, обеспечивающей высокую точность получаемых результа-
тов, задается регулярная сетка с повышенной относительно требуемой сетки частотой дискретиза-
ции. Параметры сетки с повышенной частотой дискретизации определяются с учетом степени
передискретизации (oversampling ratio), которая является входным параметром при реализации
алгоритма.
Для каждой точки (xj, yj, zj) функции f(x, y, z) определяется ближайшая точка (ξ1, ξ2, ξ3) на регу-
лярной сетке; при этом: ξ1 < xj, ξ2 < yj, ξ3 < zj. Для каждой точки функции f(x, y, z) рассчитываются
параметры гауссианы:
2
2
2
(x
−ξ
)
+(y
−ξ
)
+(z
−ξ
)
j
1
j
2
j
3
E
=
exp
−
;
(1)
1
4τ
π(x
−ξ
)
j
1
E
=
exp
;
(2)
2x
M
τ
r
π(y
−ξ
)
j
2
E
=
exp
;
(3)
2y
M
τ
r
π(z
−ξ
)
j
3
E
=
exp
;
(4)
2z
M
τ
r
2
E
3
(k) = expτk
,
k
< N /2,
(5)
где τ — параметр, определяющий ширину гауссианы; Mr — количество отсчетов в регулярной
сетке с повышенным шагом дискретизации; k — волновое число; N — размеры регулярной сетки,
для которой требуется получить преобразование Фурье.
Дефектоскопия
№ 8
2020
Применение неэквидистантного преобразования Фурье для решения задач...
5
Таким образом, для каждой точки (xj, yj, zj) функции f(x, y, z) рассчитывается:
V
= f
(x
,
y
, z
)⋅E
⋅E
(n
)⋅E
(n
)⋅E
(n
);
(6)
xyz
j
j
j
1
2x
1
2y
2
2z
3
f
τ
(m
1
+n
1
,m
2
+n
2
,
m
3
+
n
3
)
=
f
τ
(m
1
+n
1
,m
2
+n
2
,m
3
+n
3
) +V
xyz
,
(7)
(ξ
,
ξ
,ξ
)⋅M
1
2
3
r
где
n
=-M
+1,M
,
n
=-M
+1,
M
,
n
=-M
+1,M
,
(m
,m
,m
)
=
1
sp
sp
2
sp
sp
3
sp
sp
1
2
3
2π
Параметр Msp определяет количество точек на регулярной сетке с повышенной частотой дис-
кретизации в окрестности точки (xj, yj, zj) функции f (x, y, z).
Результатом сопряжения является функция
f (m
,m
,m
)
с регулярной сеткой, для которой с
τ
1
2
3
использованием алгоритма быстрого преобразования Фурье получают фурье-образ
1
2
3
F (k
,k
,k
)
τ
Получение итогового результата обеспечивается применением операции обратной свертки:
π
F(k
1
,k
2
,k
3
)
=
⋅ E
3
(k
1
)⋅E
3
(k
2
)⋅E
3
(k
3
)⋅F(k
τ
1
,k
2
,k
3
).
(8)
τ
Алгоритм имитации отжига. В контексте использования технологии ЦФА не представляется
возможным разделить режимы зондирования объекта контроля и приема эхосигналов. В этой
связи при исследовании дефектометрических характеристик используют, как правило, не диаграм-
му направленности, а функцию рассеяния точки (Point Spread Function). В точке с угловой коорди-
натой θ относительно акустической оси АР функция рассеяния точки может быть вычислена
следующим образом [13]:
n
r
p
r
T
R
PSF(ωθ
=
w n)⋅exp[
- ⋅k⋅n⋅d
⋅
sin(θ)]
⋅
w p)⋅exp[- ⋅k⋅ p⋅d
⋅sin(θ)],
(9)
∑
n
∑
m
n=n
1
p=p
1
где ω — угловая частота;wRm ,wTn — взвешивающие коэффициенты для каждого из элементов АР;
k — волновое число; n1 … nr — элементы АР, участвующие в процессе зондирования объекта кон-
троля; p1 … pr — элементы АР, участвующие в приеме отраженных эхосигналов; d — шаг антенной
решетки.
Для решения задачи получения оптимальной конфигурации разреженной АР может приме-
няться модифицированный алгоритм имитации отжига, рассмотренный в [5]. Задача алгоритма
заключается в поиске конфигурации АР, при которой ширина основного лепестка функции рассе-
яния точки, характеризуемая полной шириной на половине высоты (ПШПВ), будет наименьшей.
При этом уровень боковых лепестков будет ниже заранее установленного уровня Q. Алгоритм
имитации отжига предусматривает реализацию итерационной процедуры. При реализации алго-
ритма случайным образом задается начальная конфигурация разреженной АР. На каждой итерации
определяется новая конфигурация АР, для которой с использованием формулы (9) определяются
параметры функции рассеяния точки (ширина основного лепестка, уровень боковых лепестков).
Принятие рассматриваемой конфигурации АР в качестве текущего решения определяется вероят-
ностью P, которая рассчитывается следующим образом:
1;
∆
W
<
0,∆
SL
<
0
exp(
−∆
W
/ T
);
∆
W
>
0,∆
SL
<
0
k
P
,
(10)
=
exp(
-∆
SL/
T
);
∆
W
<
0,
∆
SL
>
0
k
exp(
−∆
W
/
T
)⋅exp(
-∆
SL
/ T
);∆
W
>
0,
∆SL
>
0
k
k
где ∆W — разница между шириной основного лепестка функции рассеяния точки рассматривае-
мой конфигурации и текущего решения; ∆SL — разница между уровнем боковых лепестков функ-
ции рассеяния точки рассматриваемой конфигурации и заданного уровня Q; Tk — температура
(параметр, определяющий вероятность принятия рассматриваемой конфигурации в качестве
текущего решения).
Дефектоскопия
№ 8
2020
6
Д.О. Долматов, Н.И. Ермошин, Д.А. Конева, Д.А. Седнев
Алгоритм пространственно-временной обработки с расчетами в частотной области для
ультразвуковой томографии с применением АР. Алгоритм пространственно-временной обра-
ботки с расчетами в частотной области для ультразвуковой томографии с использованием АР,
рассмотренный в [9], требуется адаптировать для случая использования АР, имеющих непостоян-
ный шаг между элементами. Рассмотрим набор эхосигналов, описываемый функцией p(t, xe, xr),
где t — время, а xe и хr — координаты зондирующего и принимающего элементов. Сетка, на кото-
рой задана функция, не является равномерной, что требует применения трехмерного НБПФ,
реализация которого рассмотрена в формулах (1)—(8). Результатом применения трехмерного
НБПФ является фурье-образ
P ω
k
,k
) , заданный на постоянной сетке:
xe
xr
p t,x
, x
) НБПФ→P(ω,k
,k
).
(11)
e
r
xe
xr
В рамках алгоритма пространственно-временная обработка осуществляется по отдельности
для каждого из L слоев
P ω
k
,k
=
const)
трехмерной функции. В рамках пространственно-вре-
xe
xr
менной обработки осуществляется замена переменных и интерполяция
P ω
k
,(
k
=
const))
→P(k
,k
),
i=1,L,
(12)
i
xe
xr
i
z
x
осуществляемая с применением следующих выражений:
k
=k
−k
,
(13)
xe
x
xr
4
2
2
2
4
4
2
2
1/2
w
±(k
z
+2⋅(k
xr
+
(k
x
−k
xr
)
)⋅k
z
+k
xr
+(k
x
−k
xr
)
−2⋅k
xr
⋅(k
x
−k
xr
)
)
k
=
=
,
(14)
c
2
⋅k
z
где с — скорость продольных акустических волн в объекте контроля.
Полученные изображения складываются для получения общего результата:
L
P(
k
,k
)
P
(k
,
k
).
z
x
=∑
i
z
x
(15)
i =1
Итоговое синтезированное изображение получают путем обратного двумерного преобразова-
ния Фурье функции P(kz, kx):
P
(
k
,
k
)
БПФ→I x,z).
(16)
x
z
Экспериментальная часть. Алгоритм поиска оптимальной конфигурации разреженной АР,
основанный на алгоритме имитации отжига, был реализован в программном пакете Matlab R2016a.
Исходными данными разработанного алгоритма являются:
1) количество элементов АР;
2) рабочая частота элементов АР;
3) шаг АР;
4) скорость продольных ультразвуковых волн в объекте контроля;
5) количество активных элементов в конфигурации разреженной АР.
Результатом работы алгоритма является конфигурация АР, определяющая активные элементы
в преобразователе, которые принимают участие в зондировании объекта контроля и приеме отра-
женных сигналов. Задача поиска оптимальной конфигурации решалась для АР Olympus 5L16-A10,
которая использовалась в эксперименте. Преобразователь состоит из 16 элементов с рабочей
частотой 5 МГц и шагом 0,6 мм. Алгоритм применялся для нахождения оптимальной конфигура-
ции разреженных АР, состоящих из 8, 10 и 12 элементов.
Эффективное решение задачи поиска оптимальной конфигурации разреженной АР зависит от
корректно выбранных параметров алгоритма имитации отжига. Для их получения предварительно
проводилось исследование параметров функции рассеяния точки различных конфигураций раз-
реженной АР. При реализации алгоритма имитации отжига использовались значения ∆W и ∆SL,
нормированные на предельные значения параметров функции рассеяния точки, которые были
получены в ходе исследования. В рамках поиска оптимальной конфигурации АР параметр Tk изме-
нялся от 0,5 до 0,01. При каждом фиксированном параметре Tk осуществлялось 5 итераций.
Изменение параметра Tk осуществлялось по следующему закону:
Дефектоскопия
№ 8
2020
Применение неэквидистантного преобразования Фурье для решения задач...
7
n+1
n
T
k
=
0,98⋅T
k
(17)
Значение параметра Q также определялось на основе анализа параметров функции рассеяния
точки, полученные для различных конфигураций разреженной АР. Для разреженных АР, состоя-
щих из 12, 10 и 8 элементов, параметр Q был выбран равным -25, -20 и -15 дБ соответственно.
Кроме того, в программном пакете Matlab R2016a был реализован алгоритм пространственно-
временной обработки с расчетами в частотной области с применением НБПФ, основы которого
рассмотрены в предыдущих разделах. Входными данными для алгоритма являются набор эхосиг-
налов, зарегистрированных активными элементами разреженной АР. Результатом применения
алгоритма является синтезированное изображение внутренней структуры объекта контроля.
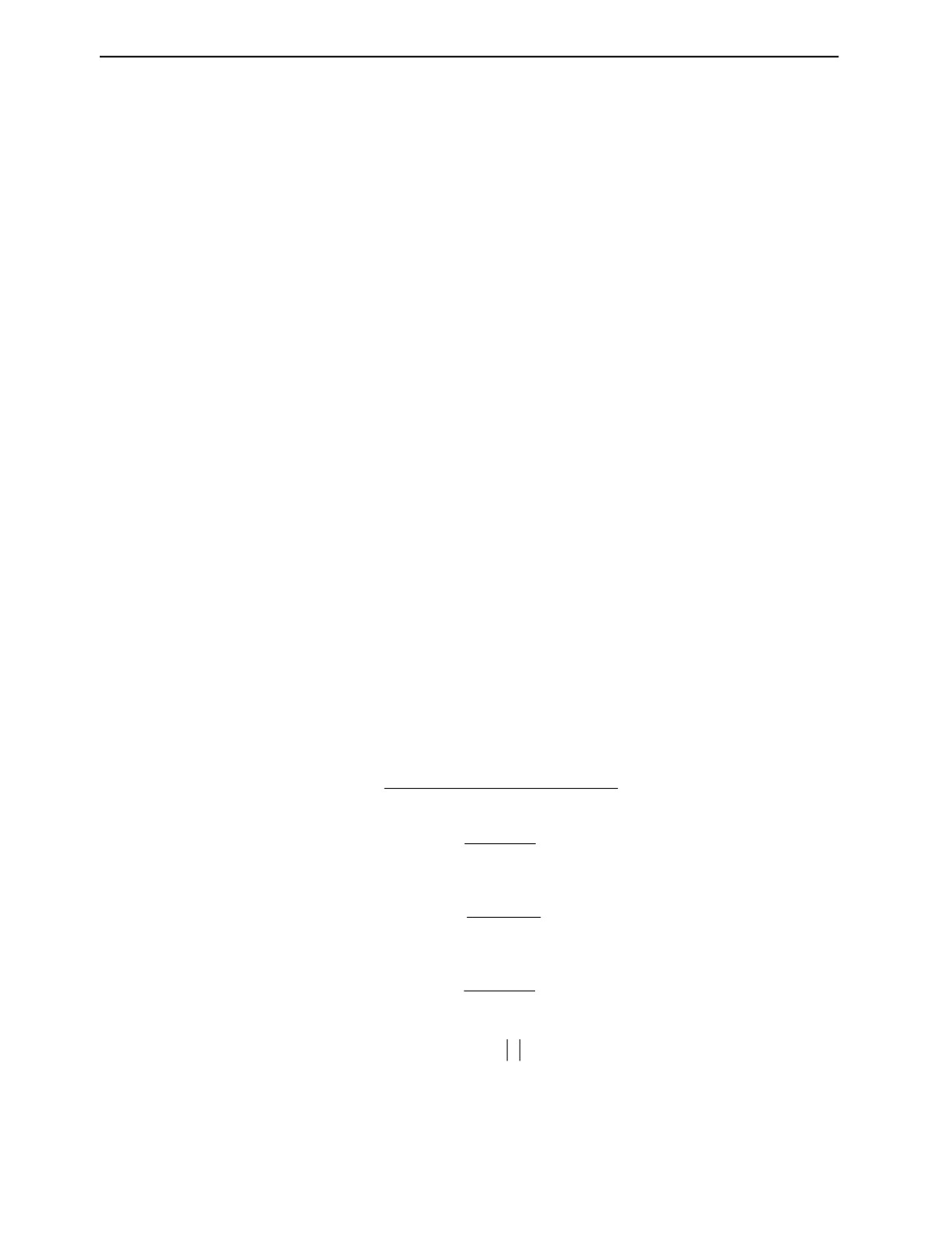
Для экспериментальной проверки использовался участок тестового блока, содержащий боко-
вые отверстия. Расположение дефектов представлено на рис. 1.
0
10
20
B
A
30
40
50
0
10
20
Ось X, мм
Рис. 1. Расположение дефектов в образце.
В представленной на рис. 1 координатной сетке центры отверстий имеют следующие коорди-
наты (в мм): А(3; 30), В(18; 26).
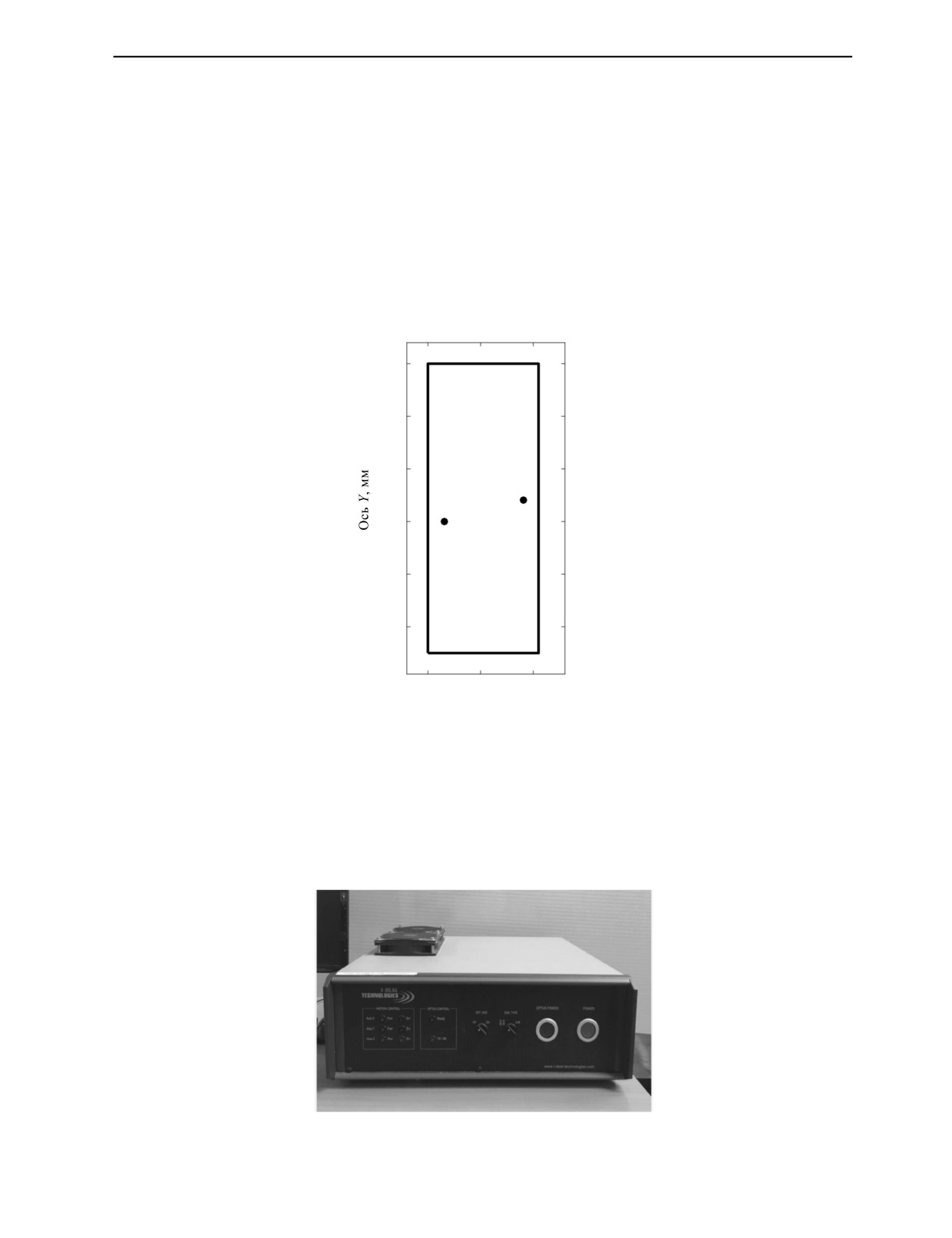
Для регистрации эхосигналов использовалась лабораторная установка, основой которой явля-
ется блок ультразвуковой электроники OPTUS (I-Deal Technologies GmbH, рис. 2). Данный блок
электроники имеет 128 каналов, реализующий как совмещенный режим, так и режим двойного
сканирования.
Рис. 2. Электронный блок OPTUS.
Дефектоскопия
№ 8
2020
8
Д.О. Долматов, Н.И. Ермошин, Д.А. Конева, Д.А. Седнев
Для оценки качества результатов, полученных с использованием алгоритма на основе исполь-
зования НБПФ, проводилось их сравнение с результатами, полученными с применением про-
странственно-временной обработки с расчетами во временной области. Вопросы реализации
такого алгоритма рассмотрены в [14]. В рамках подобного сравнения оценивалась разрешающая
способность результатов, полученных с применением двух алгоритмов, которая осуществлялась с
использованием величины Array Performance Indicator (API) [15]. Величина API рассчитывается
для каждого из отражателей по следующей формуле:
S-
6дБ
API
=
,
(18)
2
λ
где S-6дБ — площадь отражателя, в которой амплитуда синтезированного изображения выше поро-
га в -6 дБ от максимальной амплитуды, соответствующей этому отражателю на синтезированном
изображении.
РЕЗУЛЬТАТЫ И ИХ ОБСУЖДЕНИЕ
Результаты работы алгоритма имитации отжига для определения оптимальной конфигурации
разреженной АР представлены в табл. 1. На рис. 3 представлены функции рассеяния точки для
полученных конфигураций разреженной АР.
Таблица
1
Оптимальные конфигурации разреженных АР
Количество активных
Номера активных элементов
ПШПВ главного лепестка
Уровень боковых лепестков, дБ
элементов АР
8
1, 2, 3, 6, 9, 10, 12, 14
6,25
-16,12
10
1, 3, 5, 6, 8, 9, 12, 13, 14, 15
6,25
-21,64
12
1, 3, 4, 5, 7, 8, 9, 10, 12, 13, 14,15
6,55
-25,84
а
б
0
0
-10
-10
-20
-20
-30
-30
-40
-40
-50
-50
–60
-60
-50
0
50
-50
0
50
Угол, °
Угол, °
в
0
-10
-20
-30
-40
-50
-60
-50
0
50
Угол, °
Рис. 3. Функции рассеяния точек: 8 активных элементов (а); 10 активных элементов (б); 12 активных элементов (в).
Дефектоскопия
№ 8
2020
Применение неэквидистантного преобразования Фурье для решения задач...
9
а
б
в
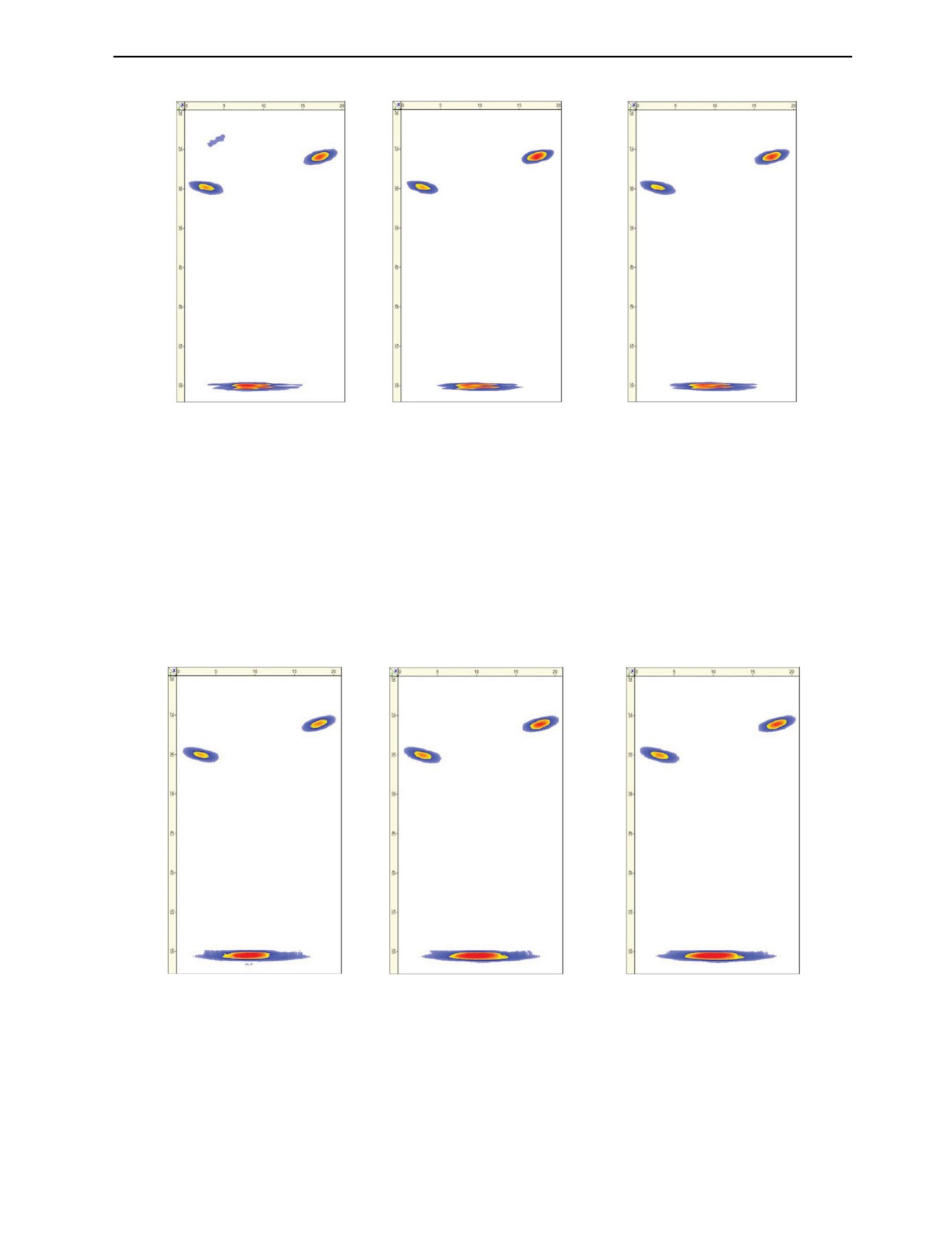
Рис. 4. Результаты применения алгоритма на основе НБПФ для ультразвуковых сигналов, полученных с использованием
разреженной АР: 8 элементов (а); 10 элементов (б); 12 элементов (в).
Набор эхосигналов, зарегистрированный элементами разреженной АР, использовался для
пространственно-временной обработки с использованием алгоритма на основе НБПФ и алго-
ритма с расчетами во временной области. На рис. 4 представлены результаты, полученные с
использованием различных конфигураций разреженной АР при использовании алгоритма на
основе НБПФ, а на рис. 5 — аналогичные результаты при использовании алгоритма с расчетами
во временной области.
а
б
в
Рис. 5. Результаты применения алгоритма расчета во временной области для ультразвуковых сигналов, полученных с
использованием разреженной АР: 8 элементов (а); 10 элементов (б); 12 элементов (в).
Оценка разрешающей способности полученных результатов проводилась с помощью опреде-
ления API отражателей для каждого из результатов. Значения API представлены в табл. 2.
Таким образом, разрешающая способность изображений, полученная с использованием алго-
ритма на основе НБПФ, оказалась сходной с разрешающей способностью результатов, получен-
ных с применением алгоритма расчета во временной области. Это свидетельствует об эффектив-
Дефектоскопия
№ 8
2020
10
Д.О. Долматов, Н.И. Ермошин, Д.А. Конева, Д.А. Седнев
Таблица
2
Значения API результатов
Алгоритм на основе НБПФ
Алгоритм с расчетами во временной области
Дефект
8 активных эле-
10 активных
12 активных
8 активных эле-
10 активных
12 активных
ментов
элементов
элементов
ментов
элементов
элементов
А
11,06
11,38
11,46
11,06
11,84
12,35
В
11,58
11,02
11,48
12,27
11,55
11,91
ности предложенного подхода для адаптации алгоритмов пространственно-временной обработки
с расчетами в частотной области для ультразвуковой томографии с использованием технологии
ЦФА и применением разреженных АР. Полученные результаты могут служить основой для даль-
нейшего развития алгоритмов пространственно-временной обработки с расчетами в частотной
области. Прежде всего, представляет интерес применение алгоритма на основе НБПФ для трех-
мерной ультразвуковой томографии с использованием разреженных и неэквидистантных матрич-
ных АР. Также важным вопросом является аппаратная оптимизация рассмотренного алгоритма,
которая не рассматривалась в рамках данной статьи. При решении данной задачи высокая скорость
получения синтезированных изображений может быть достигнута путем переноса вычислений на
программируемые логические интегральные схемы или графические процессоры.
ЗАКЛЮЧЕНИЕ
В контексте развития систем ультразвуковой томографии важным вопросом является повыше-
ние скорости получения синтезированных изображений. В этой связи интерес представляет раз-
работка и использование подходов, обеспечивающих возможность совместного использования
различных способов направленных на повышение скорости получения результатов. В данной
статье рассмотрена возможность использования НБПФ, которое обеспечивает возможность при-
менения вычислительно-эффективных алгоритмов пространственно-временной обработки с рас-
четами в частотной области в сочетании с использованием разреженных и неэквидистантных АР.
Эффективность предложенного подхода рассматривалась в контексте использования разреженной
АР, конфигураций которой была определена с использованием алгоритма имитации отжига. Про-
веденный анализ алгоритма на основе НБПФ показал его способность обеспечивать разрешаю-
щую способность, сравнимую с разрешающей способностью результатов, полученных с исполь-
зованием алгоритмов расчета во временной области. Разница в значении API отражателей при
использовании двух алгоритмов составляла не более 7 %. Таким образом, полученные результаты
могут служить базисом для дальнейших исследований и разработок, связанных с аппаратной опти-
мизацией алгоритма и его применением для трехмерной ультразвуковой томографии с использо-
ванием разреженных и неэквидистантных АР.
Исследование выполнено при финансовой поддержке Госзадания «Наука», проект № FSWW-
2020-0014, а также Программы повышения конкурентноспособности Национального исследова-
тельского Томского политехнического университета, проект № ВИУ-МНОЛ НК-187/2020.
СПИСОК ЛИТЕРАТУРЫ
1. Самокрутов А.А., Шевалдыкин В.Г. Ультразвуковая томография металлоконструкций методом
цифровой фокусировки антенной решетки // Дефектоскопия. 2011. № 1. С. 21—38.
2. Базулин Е.Г. Сравнение систем для ультразвукового неразрушающего контроля, использующих
антенные решетки или фазированные антенные решетки // Дефектоскопия. 2013. № 7. С. 51—75.
3. Bannouf S., Robert S., Casula O., Prada C. Data set reduction for ultrasonic TFM imaging using the
effective aperture approach and virtual sources // Journal of Physics: Conference Series. IOP Publishing. 2013.
V. 457. No. 1. P. 012007.
4. Hu H., Du J., Xu N., Jeong H., Wang X. Ultrasonic sparse-TFM imaging for a two-layer medium using
genetic algorithm optimization and effective aperture correction // NDT & E International. 2017. V. 90.
P. 24—32.
5. Nikolov M., Behar V. Analysis and Optimization of Medical Ultrasound Imaging Using the Effective
Aperture Approach // Cybernetics and information technologies. 2005. V. 5. No. 2. P. 257—265.
6. Martínez-Graullera O., Martín C.J., Godoy G., Ullate L.G. 2D array design based on Fermat spiral for
ultrasound imaging // Ultrasonics. 2010. V. 50. No. 2. P. 280—289.
Дефектоскопия
№ 8
2020
Применение неэквидистантного преобразования Фурье для решения задач...
11
7. Ramalli A., Boni E., Savoia A.S., Tortoli P. Density-tapered spiral arrays for ultrasound 3-D imaging //
IEEE Transactions on ultrasonics, ferroelectrics, and frequency control. 2015. V. 62. No. 8. P. 1580—1588.
8. Velichko A., Wilcox P.D. Quantitave Characterisation of Complex Defects Using Two-Dimensional
Ultrasonic Arrays // Proceedings of the ECNDT. 2010. V. 1. P. 18.
9. Hunter A.J., Drinkwater B.W., Wilcox P.D. The wavenumber algorithm for full-matrix imaging using an
ultrasonic array // IEEE transactions on ultrasonics, ferroelectrics, and frequency control. 2008. V. 55. No. 11.
P. 2450—2462.
10. Dolmatov D.O., Sednev D.A., Bulavinov A.N., Pinchuk R.V. Applying the Algorithm of Calculation in
the Frequency Domain to Ultrasonic Tomography of Layered Inhomogeneous Media Using Matrix Antenna
Arrays // Russian Journal of Nondestructive Testing. 2019. V. 55. No. 7. P. 499—506.
11. Capozzoli A., Curcio C., Liseno A. Optimized Nonuniform FFTs and Their Application to Array Factor
Computation // IEEE Transactions on Antennas and Propagation. 2018. V. 67. No. 6. P. 3924—3938.
12. Greengard L., Lee J.Y. Accelerating the nonuniform fast Fourier transform // SIAM review. 2004.
V. 46. No. 3. P. 443—454.
13. Moreau L., Drinkwater B.W., Wilcox P.D. Ultrasonic imaging algorithms with limited transmission
cycles for rapid nondestructive evaluation // IEEE transactions on ultrasonics, ferroelectrics, and frequency
control. 2009. V. 56. No. 9. P. 1932—1944.
14. Holmes C., Drinkwater B., Wilcox P. The post-processing of ultrasonic array data using the total
focusing method // Insight-Non-Destructive Testing and Condition Monitoring. 2004. V. 46. No.
11.
P. 677—680.
15. Fan C., Caleap M., Pan M., Drinkwater B.W. A comparison between ultrasonic array beamforming
and super resolution imaging algorithms for non-destructive evaluation // Ultrasonics. 2014. V. 54. No. 7.
P. 1842—1850.
Дефектоскопия
№ 8
2020